Результат интеллектуальной деятельности: Способ хаотического обзора пространства в оптической локационной системе
Вид РИД
Изобретение
Способ относится к технике пространственного поиска подвижных точечных объектов и используется в оптических локационных системах с редкими посылками зондирующих импульсов за период сканирования.
Известен способ случайного сканирования пространства радаром (патент US №3277468, МПК: G01S 7/36, G01S 19/32, G01S 19/21, G01S 19/24, G01S 1/02, заявл. 18.02.1963 г., опубл. 04.10.1966 г.), заключающийся в излучении и приеме электромагнитной энергии излучателем в данной среде, управлении вращением излучателя при излучении и приеме электромагнитной энергии, пошаговом изменении положения излучателя во время излучения и приема сигнала таким образом, чтобы временной интервал шага был полностью случайным. Недостатком аналога является низкая вероятность обнаружения цели, обусловленная случайной частотой посылок зондирующих импульсов. Случайная частота посылок повышает скрытность работы радара, однако для надежного обнаружения скоростных целей шаг по времени между зондирующими импульсами должен быть как можно меньше.
Известен, выбранный за прототип, способ обзора пространства в радиолокационной системе с фазированной антенной решеткой (патент RU №2237909, МПК G01S 13/56, дата приоритета 20.02.2003 г., опубликовано 10.10.2004 г.), заключающийся в том, что область пространства, в которой осуществляют поиск радиоконтрастных объектов (РКО), задают в виде телесного угла, разделенного на N угловых позиций, проверяют наличие целеуказаний об угловой позиции, где предположительно находится РКО - если их нет, то выбор очередной угловой позиции для просмотра из заданной области осуществляют случайным образом, в противном случае так, чтобы просмотр области выполнялся по спирали, в центре которой находится угловая позиция целеуказаний, если целеуказаний нет, то луч антенны направляют в случайно выбранную угловую позицию и в ней осуществляют обнаружение РКО, если РКО не обнаруживают, то случайным образом выбирают следующую угловую позицию и в ней осуществляют обнаружение РКО и т.д. до тех пор, пока не будет обнаружен РКО, после обнаружения РКО измеряют дальность до него, скорость сближения с ним и его пеленги, которые запоминают, также вычисляют интервал времени, через который будет осуществлена локация угловой позиции, где по расчетам будет находиться данный РКО. После этого продолжают просмотр следующих угловых позиций. После того как будет установлено, что наступило время обслуживания очередного обнаруженного РКО, луч антенны направляют в угловую позицию, где по расчетам должен находиться этот РКО, и осуществляют локацию этой угловой позиции, причем в этом случае время локации увеличивают. Недостатком прототипа является равномерное и, следовательно, неэффективное распределение энергетических затрат в объеме поиска, т.е. в конусе, задаваемом телесным углом и максимальной дальностью локации. Действительно, для обнаружения цели на максимальной дальности необходимо посылать зондирующие импульсы с максимальной энергией. В оптическом диапазоне локации для получения мощного импульса требуется больше времени накачки лазера, поэтому посылки зондирующих импульсов за цикл сканирования получаются редкими. На больших дальностях, где угловые скорости возможной цели малы, редкая частота посылок не так критична, как на малых дальностях. Действительно, цель может залететь в телесный угол обзора сбоку и на малых дальностях будет иметь высокую угловую скорость, тогда малая частота зондирующих импульсов снижает вероятность обнаружения цели.
Технический результат заявленного решения заключается в повышении вероятности обнаружения цели и скрытности работы локатора во всем объеме пространства поиска.
Указанный технический результат достигается тем, что в известном способе, заключающемся в задании области пространства, в которой осуществляют поиск точечных подвижных целей в виде телесного угла, на оси которого находится угловая позиция целеуказаний, и просмотре области по спирали путем посылки зондирующих импульсов, луч антенны разворачивают по спирали, образованной в плоском сечении хаотического аттрактора.
Тот же результат достигается тем, что луч антенны разворачивают по спирали, образованной в плоском сечении аттрактора Рёсслера, задаваемого системой дифференциальных уравнений
dx/dt=ху-ах+by,
dy/dt=-х-z,
dz/dt=y+cz,
где t - время, x, y, z - координаты в декартовой системе координат, а, b, с - постоянные коэффициенты, причем продольную ось х гомоклинической орбиты аттрактора направляют по оси телесного угла в сторону цели, а в зависимости от координат у и z управляют развертыванием луча антенны в плоскости, перпендикулярной оси телесного угла.
Тот же результат достигается тем, что изменяют мощность и частоту следования зондирующих импульсов в зависимости от изменения расчетной длины D радиуса-вектора изображающей точки аттрактора, значение D рассчитывают по формуле  , где R - постоянная наклонная дальность от антенны до точки «седло-фокус» аттрактора.
, где R - постоянная наклонная дальность от антенны до точки «седло-фокус» аттрактора.
По сравнению с прототипом изобретение имеет новую совокупность существенных признаков, то есть отвечает критерию новизны.
Сущность изобретения заключается в том, что луч оптической антенны локатора в пространстве поиска разворачивают по спирали, программно задаваемой генератором хаотических колебаний, уравнения, движения которого представляют трехмерный хаотический непрерывный аттрактор, например аттрактор Рёсслера, задаваемый системой дифференциальных уравнений
dx/dt=ху-ах+by,
dy/dt=-х-z,
dz/dt=y+cz,
где t - время, x,y,z - координаты в декартовой системе координат, а, b, с - постоянные коэффициенты (Г. Николис, И. Пригожин. Познание сложного. Введение. М.: Мир, 1990, с. 149-151).
Сечение аттрактора в плоскости yOz, где О - начало координат, точка «седло-фокус», является спиралью, раскручивающейся с хаотическим периодом сканирования. В отличие от регулярных разверток, при которых противником может быть предсказано положение развертываемого луча в пространстве, хаотическое движение непредсказуемо. В этом оно совпадает со случайной разверткой. Поэтому для противника хаотический поиск обладает скрытностью.
Если обнаруживаемая цель является «нашей», то аппаратура на борту цели может полностью восстановить положение поискового луча в пространстве, если будут известны начальные условия на координаты x, y, z генератора хаотических колебаний и координаты оптического локатора. Следовательно, «наша» цель может маневрировать так, чтобы быстрее оказаться в зоне облучения. Вероятность обнаружения в этом случае увеличивается.
Кроме того, в способе предлагается менять мощность излучения зондирующих импульсов, так, чтобы точка максимальной энергии гауссового пучка диаграммы направленности антенны перемещалась по пространственной спирали аттрактора Рёсслера. В этом случае «длина лепестка» диаграммы направленности антенны будет переменной, т.е. дальность возможного обнаружения цели будет меняться в зависимости от того, в какой точке просматриваемого объема пространства находится луч.
Если луч, в соответствии с концом радиуса-вектора аттрактора Рёсслера, должен находиться на наибольшей дальности от точки посылки зондирующих импульсов, то их мощность увеличивается, и частоту посылок приходиться снижать. Но это несущественно сказывается на вероятности обнаружения, поскольку на больших дальностях угловые скорости возможных целей минимальны.
Если цель вошла в телесный угол зоны обзора сбоку, на малых дальностях, то ее угловые скорости велики, поэтому для повышения вероятности обнаружения частоту посылок увеличивают, а мощность уменьшают. Тем самым достигается наиболее рациональный расход энергии посылок в пространстве поиска, а следовательно, и оптимальный тепловой режим работы источника излучения.
Сущность изобретения поясняется фигурами, где:
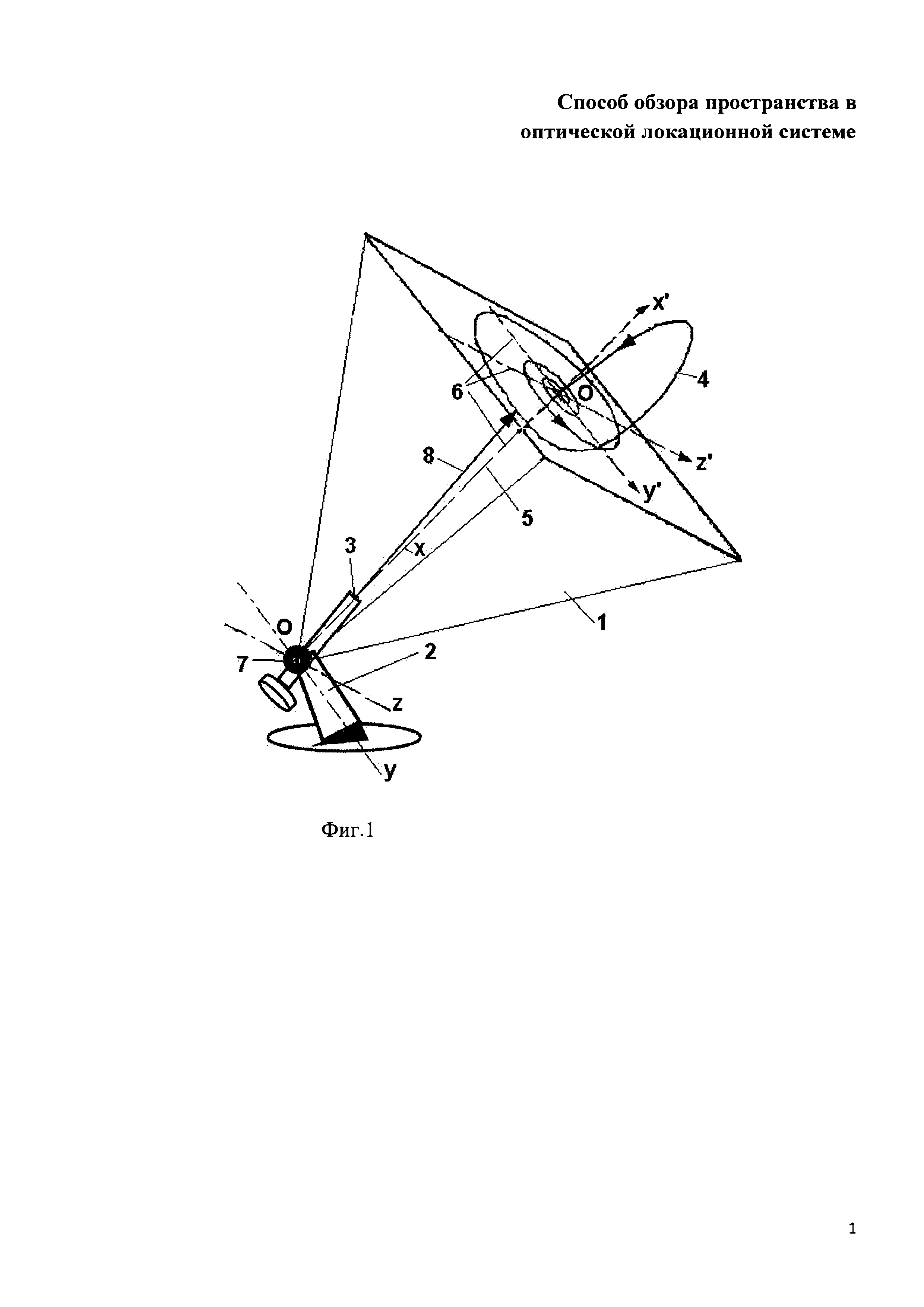
на фиг. 1 представлена геометрия развертки луча в телесном угле зоны поиска,
на фиг. 2 - функциональная схема системы управления лучом, в которой реализуется заявленный способ,
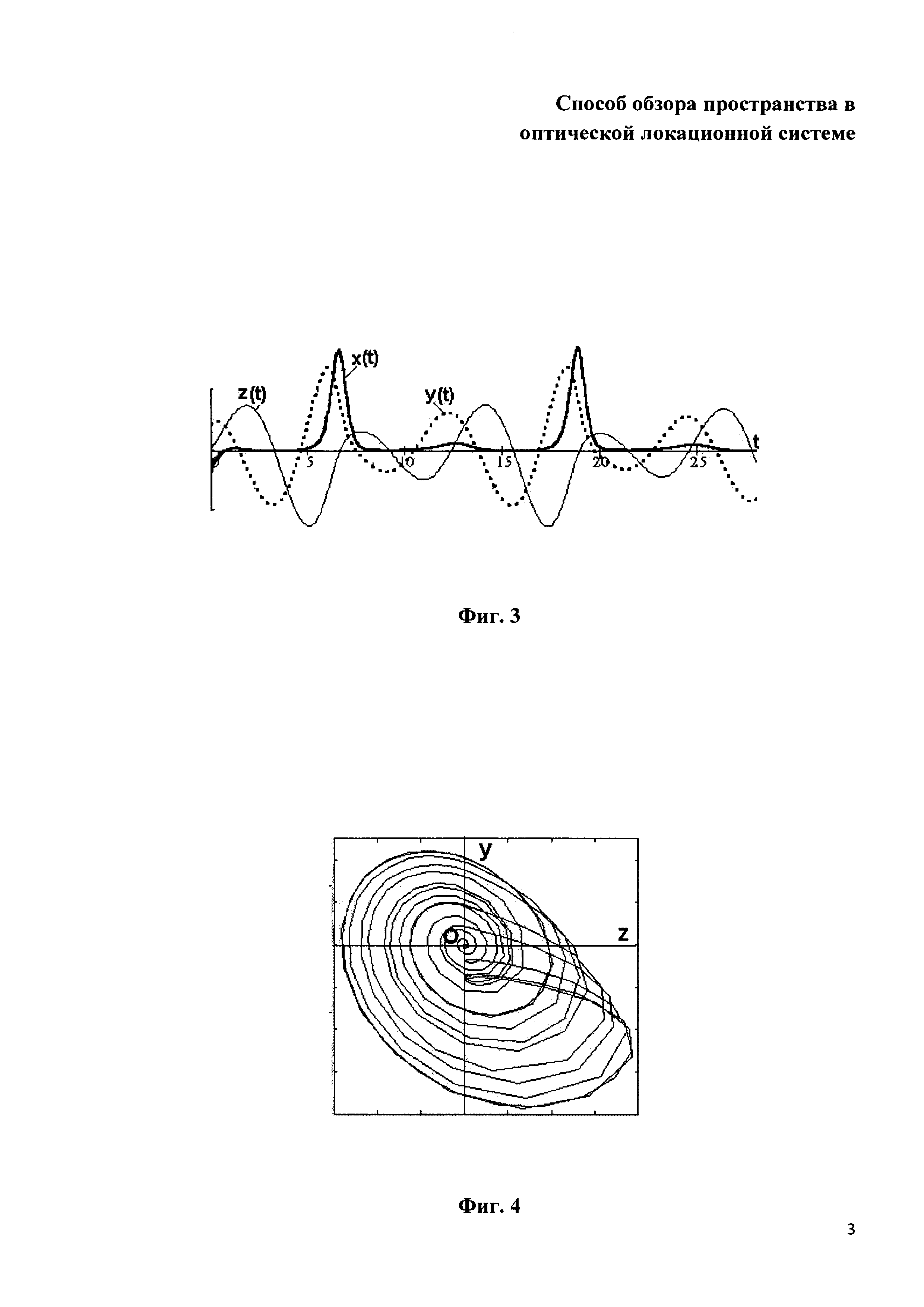
на фиг. 3 - графики напряжений на выходах генератора хаотических колебаний Рёсслера,
на фиг. 4 - типичный вид хаотической спирали в плоскости yz.
На фигурах введены следующие обозначения:
1 - телесный угол зоны поиска, 2 - источник излучения, 3 - антенна источника излучения 2, 4 - гомоклиническая орбита аттрактора Рёсслера, 5 - ось телесного угла 1, 6 - система координат О'х'у'z' аттрактора Рёсслера с центром О' в точке «седло-фокус», 7 - неподвижная система координат Oxyz, связанная с источником излучения 2, 8 - луч антенны 3, 9 - генератор хаотических колебаний, 10 - блок расчета управлений, 11 - привод антенны 8 по углу места, 12 - привод антенны 8 по азимуту, 13 - система накачки источника излучения 2, причем выходы х, у и z генератора хаотических колебаний 9 подключены соответственно к первому, второму и третьему входам блока расчета управлений 10, первый выход которого через привод 11 антенны по углу места подключен к антенне 3, второй выход блока расчета управлений 10 через привод 12 антенны по азимуту подключен к антенне 3, а третий выход блока расчета управлений 10 через систему накачки 13 источника излучений подключен к источнику излучений 2.
Перед началом обзора пространства производят настройку генератора хаотических колебаний 9 (фиг. 2). На интеграторах (на фиг. 2 не показаны) генератора 9 устанавливают в общем случае произвольные начальные условия, на усилителях (на фиг. 2 не показаны) устанавливают коэффициенты передачи a, b, c, например для режима винтового хаоса а=4.5, 6=0.3, с=0.38. Включают интегрирование и на выходах генератора 9 получают сигналы координат x(t), y(t), z(t) (фиг. 3) спирали хаотического аттрактора в неподвижной системе координат 7, связанной с источником излучения 2.
Как видно из фиг. 3, колебания координат имеют хаотическую частоту и амплитуду. Притягивающим множеством для колебаний является гомоклиническая орбита 4 аттрактора, одновременно являющаяся и отталкивающим множеством, поскольку она неустойчива. В начале системы координат имеется точка типа «седло-фокус», через которую проходит продольная ось гомоклинической орбиты 4, направленная по координате х. Положение луча 8 антенны 3 по оси телесного угла зоны поиска 1, принимают за нулевое положение для отсчета координат у и z аттрактора. В режиме обзора зоны поиска луч 8 непрерывно перемещают в системе координат 7 Oxyz по радиусу-вектору с координатами х, у, z, генерируемыми генератором 9. Поворот луча 8 в продольной плоскости xOz относительно оси Оу будем называть поворотом по углу места α, а поворот луча 8 в поперечной плоскости хОу относительно оси Oz будем называть поворотом по азимуту β. Для расчета сигналов α и β на приводы антенны 3 по углу места 11 и по азимуту 12 сигналы с генератора 9 подают на блок расчета управлений 10. В блоке 10 рассчитывают текущую длину D радиуса-вектора аттрактора Рёсслера по формуле
 ,
,
направляющие косинусы углов места и азимута  и управляющие сигналы α=arcos(α) и β=arcos(β). Сигналы α и β подают соответственно на приводы 11 и 12 антенны 3, которые и разворачивают луч 8 по хаотической спирали. Типичный вид спирали в плоскости yOz приведен на фиг. 4. Особенностью аттрактора Рёсслера является образование явно выраженного лепестка в плоскости yOz. На фиг. 3 видно, что продольная координата x(t) имеет большие интервалы приближенного равенства нулю.
и управляющие сигналы α=arcos(α) и β=arcos(β). Сигналы α и β подают соответственно на приводы 11 и 12 антенны 3, которые и разворачивают луч 8 по хаотической спирали. Типичный вид спирали в плоскости yOz приведен на фиг. 4. Особенностью аттрактора Рёсслера является образование явно выраженного лепестка в плоскости yOz. На фиг. 3 видно, что продольная координата x(t) имеет большие интервалы приближенного равенства нулю.
На этих интервалах спираль приближенно разворачивается в плоскости yOz.
Действительно, если принять x(t)≈0, второе уравнение аттрактора будет иметь вид dy/dt≈-z, тогда, если y(t)≈cos(t), то z(t)≈-sin(t), и траектория будет представлять окружность, если амплитуда гармонических колебаний постоянная. Но поскольку амплитуда растет, то окружность превращается в раскручивающуюся спираль. Для регулирования размаха колебаний применяют операцию масштабирования. Для этого в блоке расчета 10 координаты x, y, z, поступающие с генератора 9, предварительно умножают на масштабирующий множитель m. Для масштабирования процессов по времени перед интеграторами генератора 9 включают масштабирующие усилители (на фиг. 2 не показаны) с коэффициентами передачи Т.
Для варианта способа обзора с переменными мощностью и частотой посылок зондирующих импульсов, центр гомоклинической орбиты аттрактора Рёсслера, точку «седло-фокус» переносят вдоль оси телесного угла по оси х на дальность R, в точку О' (фиг. 1). Для этого в блоке 20 пересчитывают координаты радиуса-вектора изображающей точки аттрактора Рёсслера по формулам x'=x+R, у'=у, z'=z в новую систему координат 6. Рассчитывают дальность D по формуле
 ,
,
и, в зависимости от расчетной дальности D, в системе накачки 13 изменяют частоту и мощность зондирующих импульсов. Например, при дальности D=R устанавливают минимальную мощность Р посылок, обеспечивающую обнаружение цели с заданной вероятностью, и максимальную частоту ƒ посылок, обеспечивающую допустимый тепловой режим работы источника излучения 2. Одновременно с разверткой луча 8 по углу места и азимуту по мере увеличения расчетной дальности увеличивают мощность Р зондирующих импульсов с одновременным уменьшением частоты ƒ их посылок, так, чтобы средняя мощность за период посылок оставалась постоянной. В случае увеличения или уменьшения телесного угла поиска осуществляют масштабирование по осям координат и по времени, как рассмотрено выше.
Таким образом, заявляемое техническое решение повышает вероятность обнаружения цели и скрытности работы локатора во всем объеме пространства поиска.

Способ сушки термолабильных материалов
Способ получения металлических пленок заданной формы
Способ проектирования многорежимной интеллектуальной системы управления распределенной средой мягких вычислений
Способ и устройство контроля неравномерности толщины стенок недоступных трубопроводов
Способ изготовления полой трехмерной структуры в объеме пластины фоточувствительного стекла
Магнитно-резонансный томограф
Способ определения плотности мобильных ионов в композитных средах на основе жидких кристаллов
Способ автоматизированной юстировки линзы в оправе и оправа для его осуществления
Способ юстировки линзы в оправе и оправа для его осуществления
Способ центрировки линз объектива штабельной конструкции и оправы линз для его осуществления
Способ сушки термолабильных материалов
Способ получения металлических пленок заданной формы
Способ проектирования многорежимной интеллектуальной системы управления распределенной средой мягких вычислений
Способ и устройство контроля неравномерности толщины стенок недоступных трубопроводов
Способ изготовления полой трехмерной структуры в объеме пластины фоточувствительного стекла
Магнитно-резонансный томограф
Способ определения плотности мобильных ионов в композитных средах на основе жидких кристаллов
Способ автоматизированной юстировки линзы в оправе и оправа для его осуществления
Способ юстировки линзы в оправе и оправа для его осуществления
Способ центрировки линз объектива штабельной конструкции и оправы линз для его осуществления

