Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИМПЛАНТАТОВ
Вид РИД
Изобретение
Изобретение относится к медицинской технике и может быть использовано при производстве имплантатов и костных шурупов, а также в стоматологии при операциях имплантации, в травматологии при остеосинтезе.
Известно устройство изготовления стоматологического имплантата с многослойным биоактивным покрытием (патент РФ 2146535), которое включает узел пескоструйной обработки имплантата для получения шероховатости поверхности и узел плазменного напыления, которое позволяет обеспечить адгезионную прочность, однако не создает поверхностной упорядоченной пористости покрытия, в результате чего снижается уровень его остеоинтеграции.
Известно устройство [1] для получения наноструктурированной (наноструктурной) пористой поверхности имплантатов из титана и сплавов титана, включающее узел пескоструйной обработки, узлы травления в растворах кислот и анодирования. Данное устройство не позволяет получить достаточную поверхностную пористость покрытия, что снижает его остеоинтеграционные свойства.
Известно устройство для модификации поверхности имплантатов, описанное в [2].
Устройство включает в себя эксимерный лазер KrF (1) (248 нм, длина импульса 30 не, 50 Гц) (LPX 305, «Лямбда физике», Гёттинген, Германия), комплект линз и имплантат, установленный на вращающимся столике.
Недостатками устройства является отсутствие узла продольного перемещения имплантата, что не позволяет обеспечить равномерной обработки лазерным лучом всей поверхности имплантата.
Ближайшим прототипом предлагаемого решения является устройство для обработки поверхности имплантата, включающее в себя источник ионов (электронов), камеру с установленным в ней имплантатом, вакуумный насос и натекатель, присоединенные к камере [3].
Недостатком устройства-прототипа является отсутствие в нем узла, позволяющего придавать имплантату одновременное вращательное и возвратно-поступательное перемещение имплантата, что не позволяет равномерно обрабатывать ионным или электронным пучком всю поверхность имплантата.
Техническая задача изобретения состоит в обеспечении равномерного облучения поверхности имплантата электронным или ионным пучком, за счет придания имплантату возможности не только вращательного движения, но и равномерного продольного возвратно-поступательного перемещения без нарушения герметичности камеры.
Поставленная задача решается тем, что в устройство для модификации поверхности имплантатов, включающее в себя камеру с имплантатом, вакуумный насос, натекатель и источник ионов или электронов, дополнительно введены реверсивный двигатель, постоянные плоские магниты, перемещающий узел, захват, гайка и два концевых выключателя, причем реверсивный двигатель установлен вне камеры, и на торце его вала размещен один или несколько постоянных плоских магнитов, плоскости которых установлены параллельно плоскости заглушки камеры, выполненной из немагнитного материала, в виде плоского диска и герметично прикрепленной через уплотнительные манжеты к одному из патрубков камеры, при этом в камере с другой стороны заглушки выполнен перемещающий узел, состоящий из двух осей, шарикоподшипника, гайки зажима и двух концевых выключателей, при этом на торце первой оси перемещающего узла также закреплены один или несколько постоянных плоских магнитов, плоскости которых установлены также параллельно плоскости заглушки, причем магниты на торце вала реверсивного двигателя и на торце первой оси вращающего узла установлены на расстоянии 1-2 мм относительно заглушки камеры и расположены так, чтобы их магнитные полюса были взаимно противоположны, при этом первая ось перемещающего узла запрессована во внутреннее кольцо шарикоподшипника, внешнее кольцо подшипника закреплено механически через стойку к стенке камеры, другой конец первой оси перемещающего узла выполнен виде плоского выступа, введенного в шлиц, который выполнен на одном торце второй оси перемещающего узла, на другом торце второй оси перемещающего узла механически закреплен зажим, вторая ось перемещающего узла выполнена в виде цилиндра с резьбой, вкрученной в гайку, механически закрепленную через стойку к внутренней стенке камеры, при этом на образующей поверхности второй оси перемещающего узла установлены элементы концевых выключателей.
На фиг. 1. приведена схема реверсивного двигателя РД-09. На фиг. 2 приведена схема заявляемого устройства. Фиг. 1 и фиг. 2 служат для пояснения сущности изобретения. На фиг. 1 введены следующие обозначения: 1, 2, 3, 4 - клеммы на корпусе реверсивного двигателя РД-09. Цифрой 5 обозначены контакты концевого выключателя.
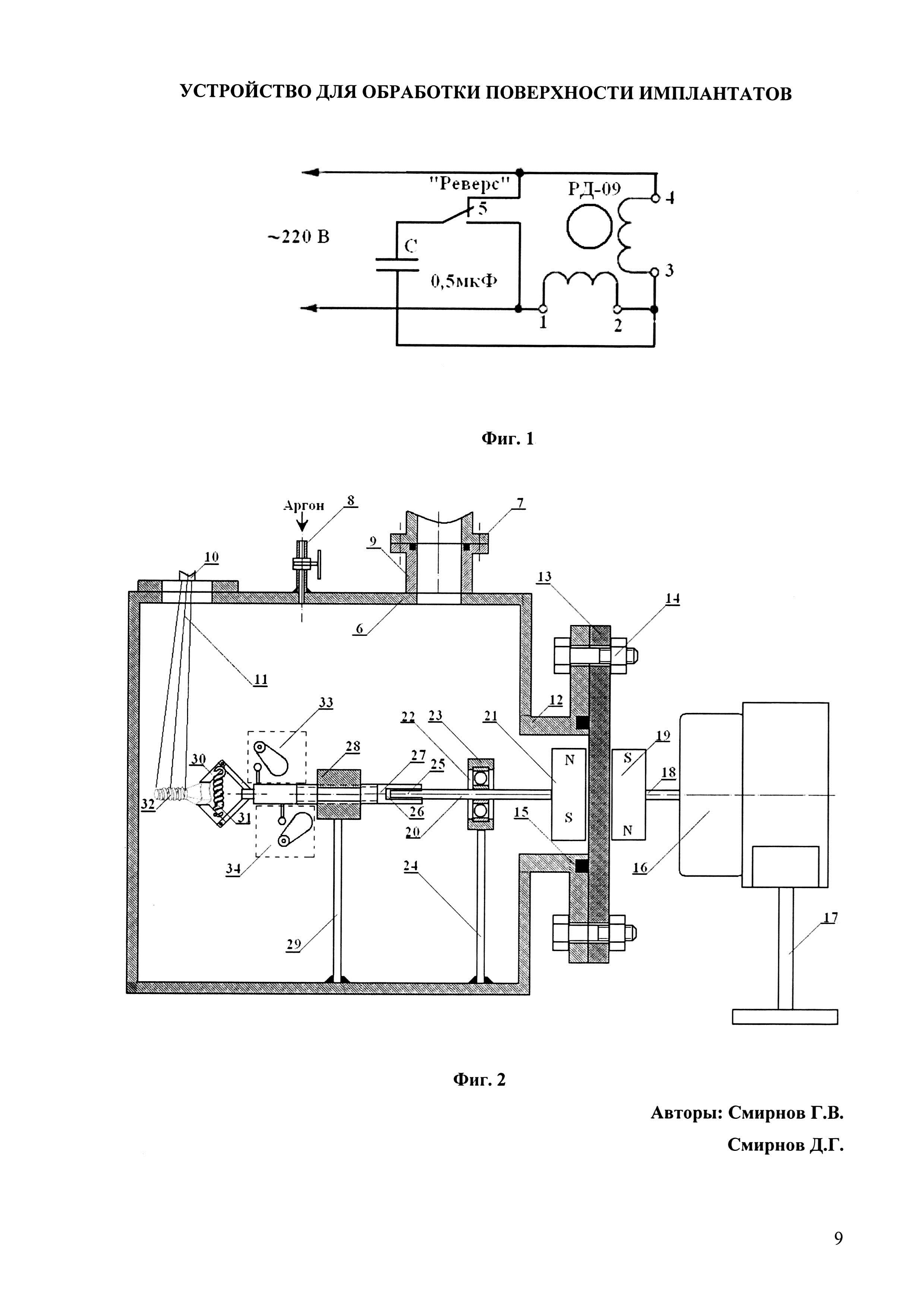
На фиг. 2 введены следующие обозначения: 6 - камера; 7 - вакуумный насос; 8 - натекатель; 9 - патрубок; 10 - источник ионов (электронов); 11 - пучок ионов (электронов); 12 - патрубок; 13 - заглушка; 14 - крепежные детали; 15 - уплотняющая манжета; 16 - реверсивный двигатель; 17 - подставка; 18 - вал реверсивного двигателя; 19 - плоский постоянный магнит; 20 - первая ось перемещающего устройства; 21 - плоский постоянный магнит; 22 - шарикоподшипник; 23 - внешнее кольцо шарикоподшипника; 24 - стойка; 25 - плоский выступ; 26 - шлиц; 27 - вторая ось перемещающего узла; 28 - гайка; 29 - стойка; 30 - захват; 31 - пружина; 32 – имплантат; 33 и 34 - элементы концевых выключателей.
Конструкция заявляемого устройства приведена на фиг. 2. Камера 6 (фиг. 2) имеет несколько патрубков. На фиг. 2 их 2 - патрубок 9 и патрубок 12. К патрубку 9 герметично прикреплен вакуумный насос 7. Источником ионов (электронов) служит пушка импульсного ускорителя ионов (электронов). Пучок ионов (электронов) обозначен позицией 11. К патрубку 12 герметично прикреплена заглушка 13, выполненная из немагнитного материала в виде плоского диска. Крепление заглушки 13 к патрубку 12 осуществляется при помощи крепежных деталей 14, а герметичность внутри камеры 6 обеспечивается уплотняющей манжетой 15. Снаружи камеры 6 расположен реверсивный двигатель 16, на подставке 17. На торце вала 18 реверсивного двигателя 16 закреплен плоский постоянный магнит 19. Плоскость постоянного магнита установлена параллельно плоскости заглушки 13 на расстоянии от нее 1-2 мм. С другой стороны заглушки 13 в камере 6 на торце первой оси 20 перемещающего устройства также закреплен плоский постоянный магнит 21. Плоскость магнита 21 также параллельна плоскости заглушки 13 и установлена на расстоянии от нее 1-2 мм. Полюса магнитов 19 и 21 установлены таким образом, чтобы под действием магнитного поля они взаимно притягивались. Выбор расстояния 1-2 мм между поверхностями заглушки и плоскостями магнитов 19 и 21 был выбран из следующих соображений. Сила магнитного взаимодействия (притяжения) между магнитами 19 и 21 тем сильнее, чем ближе их плоскости друг к другу. При этом, если выбрать величину расстояния между плоскостями магнитов 19 и 21 и заглушкой 13 менее 1 мм, то это может привести при вращении указанных магнитов, из- за возможного перекоса осей и некоторой возможной не параллельности плоскостей магнитов к плоскости заглушки 13, к механическому соприкосновению магнитов с заглушкой, что может нарушить нормальный ход работы устройства. При зазоре более 2 мм между заглушкой 13 и магнитами 19 и 21 сила магнитного взаимодействия между магнитами ослабевает, что также нежелательно.
Первая ось 20 впрессована во внутреннее кольцо подшипника 22, внешнее кольцо 23 подшипника 22 жестко закреплено через стойку 24 к внутренней стенке камеры 6. Второй торец оси первой оси перемещающего устройства 20 выполнен в виде плоского выступа 25. Плоский выступ 25 введен в шлиц 26, выполненный в торце второй оси 27 перемещающего устройства. Вторая ось 27 перемещающего устройства выполнена в виде цилиндрического стержня с нарезанной на его поверхности резьбой, при помощи которой упомянутая ось вкручивается в гайку 28, жестко закрепленную через стойку 29 к поверхности камеры 6. На противоположном торце камеры выполнен шарнирный зажим 30, со стягивающей пружиной 31. Обрабатываемый имплантат 32 перед облучением закрепляется в зажим 30. На образующей поверхности оси 27 выполнены кулачки (толкатели), воздействующие на концевые выключатели 33 и 34.
Заявляемое устройство работает следующим образом. В камере 6 при помощи вакуумного насоса создается разрежение порядка 10-6-10-7 Торр (1 Па ≈ 0,0075 Торр). После этого вакуумный насос 7 выключатся, и закрывается его затвор, обеспечивая герметичность камеры 6. Через натекатель 8 в камеру 6 напускается аргон. При достижении давлением аргона внутри камеры 6 порядка 0,1-1 Па прекращают подачу аргона в камеру 6, для чего натекатель 8 перекрывают. После этого включают реверсивный двигатель 16 и ускоритель заряженных частиц. Пучок ионов (электронов) 11 начинает облучать поверхность имплантата 32. Для того чтобы пучок ионов (электронов) 11 равномерно облучал поверхность имплантата 32, указанный имплантат необходимо не только равномерно вращать вокруг своей оси, но и равномерно перемещать в продольном направлении. Указанное вращение и перемещение имплантата происходит следующим образом. Пусть обмотки реверсивного двигателя подключены так, как это показано на фиг. 1. При этом вал реверсивного двигателя вращается в одну сторону, например по часовой стрелке. Постоянный плоский магнит также начинает вращаться в том же направлении. За счет того, что заглушка 13 выполнена из немагнитного материала, вращающийся магнит 19 за счет взаимного магнитного притяжения магнитов 19 и 21 начинает вращать магнит 21. Первая ось 20 перемещающего узла также начинает вращаться в закрепленном шарикоподшипнике 23. Плоский выступ, выполненный на другом торце оси 20 за счет шлицевого соединения, начинает вращать вторую ось 27 перемещающего узла.
Ось 27 начинает вкручиваться в гайку 28, неподвижно закрепленную через стойку 29 к стенке камеры 6. При вкручивании оси в резьбу гайки 28 ось 28 начинает перемещаться в продольном направлении (на фиг. 2 влево). При этом имплантат также начинает перемещаться влево, сохраняя при этом вращательное движение вместе с осью 27 перемещающего узла. Это продольное перемещение будет продолжаться до тех пор, пока под действием кулачка (толкателя) не сработает концевой выключатель 33.
Как только ось 27 переместится на заданное расстояние, которое определяется продольными размерами имплантата 32, срабатывают контакты 33 концевого выключателя. При срабатывании концевого выключателя контактом 5 (фиг. 1) конденсатор С отключается от клеммы 4 реверсивного двигателя и подключается к клемме 3 и 2, за счет чего реверсивный двигатель начинает вращаться в противоположную сторону (против часовой стрелки). Вал двигателя 18 (фиг. 2) также начинает вращаться против часовой стрелки. При этом за счет шлицевого соединения ось 27 перемещающего узла также начинает вращаться против часовой стрелки. Это вращение приводит к тому, что ось 27 начинает выкручиваться из резьбы гайки 28, за счет чего имплантат 32, продолжая вращаться, начинает перемещаться в противоположном, относительно начального, продольном направлении. Это происходит до тех пор, пока имплантат 32 не пройдет заданного расстояния, определяемого габаритами имплантата. После чего срабатывает концевой выключатель 34, контакты 5 (фиг. 1) приходят в исходное положение и реверсивный двигатель начинает вращаться в противоположном направлении. Обработка имплантата заканчивается после 10-15 циклов переключения реверсивного двигателя.
Суть изобретения заключается в следующем. Известно, что остеоинтеграция имплантата в альвеолярную ткань происходит тем лучше, чем больше пор и микротрещин находится на его поверхности. Такой микрорельеф на поверхностном слое имплантата, выполненного из титана, толщиной 10-200 мкм, получают, в частности, обработкой поверхности имплантата мощным ионным (электронным) пучком [3].
Пример конкретного выполнения. Каркас зубного имплантат 32 (фиг. 2) был выполнен из титана. Нижняя часть (дистальный конец) зубного имплантата 32 была выполнена в виде сужающегося книзу усеченного конуса. На указанном конусе была выполнена самонарезающая резьба, что обеспечивает возможность непосредственного ввинчивания имплантата 32 в высверленное отверстие в альвеолярной кости.
Каркас зубного имплантата 32 закрепляли захватом 31, расположенным на торце оси 27 перемещающего узла, размещенного камере 6. Камеру 6 предварительно откачивали вакуумным насосом 7 до разрежения порядка 10-6 Торр. Затем через натекатель 8 камеру 6 наполняли аргоном до давления 1 Па.
Имплантат состоял из внутрикостной и внекостной частей. Внутрикостная часть выполнена в форме цилиндра и имеет упорную резьбу по всей его длине. Внутренняя часть цилиндра - вершина, сделана закругленной и имела три выборки для придания имплантату свойств самонарезающегося винта. Внекостная часть выполнена полой и снабжена шестигранным хвостовиком, устанавливаемым в углубление внутрикостной части с конгруэнтной поверхностью. Внекостная часть соединяется с внутрикостной частью посредством фиксирующего винта, проходящего через внутреннее отверстие внекостной части. На резьбовой наружной поверхности внутрикостной части имеется развитой микрорельеф, приближенный к микроархитектонике кости. Толщина слоя составляет от 10 до 200 мкм. В предложенном имплантате упорная резьба по всей длине внутрикостной части выполняет функцию элементов макроретенции, а микрорельеф выполняет функцию элементов микроретенции, что обеспечивает необходимую первичную стабильность и надежную фиксацию имплантата в челюстных костях, а в итоге - его долговременное функционирование. Имплантат изготовлен из упрочненного сплава титана ВТ 1-0, относящегося к разряду GRADE 4 (ASTM F67).
Микрорельеф наружной поверхности, приближенный к микроархитектонике кости, получают обработкой поверхности имплантата мощным электронным пучком наносекундной длительности с плотностью энергии в пучке 20 Дж/см2 и в атмосфере аргона или при остаточном давлении 1 Па без последующего отжига. Использование для обработки имплантата концентрированных потоков энергии позволяет создать сочетание заранее спрогнозированных физико-химических свойств в его поверхностном слое, а именно получение поверхности со строго контролируемым по степени шероховатости микрорельефом требуемой топографии (текстурирования), высокой химической чистоты поверхностных слоев и формирование в них заданного фазового состава.
Передача равномерного вращения и перемещения из воздуха в камеру осуществлялась при помощи неодимовых прямоугольных магнитов 19 и 21, выполненных из сплава NdFeB. Марка магнитов №42. Габариты магнитов 40×40×20 мм. Магниты имели следующие характеристики: остаточная индукция - 1,28-1,30 Тл; коэрцитивная сила ≥923 кА/м; магнитная энергия 318-342 кДж/м; максимальная рабочая температура -80°С.
Для вращения и продольного перемещения и вращения имплантата был использован реверсивный двигатель РД-09. На фиг. 1 показана схема питания и реверсивного переключения указанного двигателя от сети переменного напряжения 220 В частотой 50 Гц. Двигатель РД-09 имеет встроенный редуктор, благодаря которому скорость вращения вала двигателя может изменяться в широком диапазоне от 1,75 до 185 об/мин. В рассматриваемом примере использовалась скорость вращения 3,5 об/мин. Скорость продольного перемещения имплантата зависит от шага резьбы в гайке 28 и на оси 27, а также от скорости вращения вала двигателя. В рассматриваемом случае в гайке 28 и на оси 27 была выполнена метрическая резьба M15×15. Расстояние продольного перемещения определяется длиной выступа 25 на конце вала 20 и глубиной шлица 26 на торце оси 27. В зависимости от продольных размеров имплантата 32 величина продольного перемещения задается расстоянием, между контактами концевых выключателей. В рассматриваемом случае максимальное расстояние продольного перемещения было рассчитано на 10 мм. После обработки поверхности титанового имплантата 32 электронным пучком исследовались характеристики обработанной поверхности.
Исследования с помощью электронной микроскопии поверхности имплантата 32, обработанной электронным пучком, показали, что она, по сравнению с обработанной при помощи устройства прототипа, в котором отсутствовала возможность равномерного вращения и возвратно-поступательного движения имплантата относительна пучка электронов, имеет многочисленные микротрещины и поры диаметром 1,5-4 мкм, более равномерно распределенные по поверхности имплантата.
Эффективность остеоинтеграции имплантатов в костную ткань облученных пучком электронов имплантатов исследовалась на подопытных животных (крысах). Исследования показали, что коэффициент срастания поверхности корпуса имплантата с костной тканью для сравнительного (изготовленного при помощи устройства-прототипа) образца составил порядка 41%, а для опытного (изготовленного при помощи заявляемого устройства) образца - 62%, что говорит о значительном повышении эффективности врастания в костную ткань имплантата, изготовленного с помощью заявляемого устройства. Такой тип заживления кости является морфологическим эквивалентом остеоинтеграции, когда в пограничном имплантату пространстве стадийно формируются зрелые костные структуры. Кость постепенно интегрирует с развитым до схожести с ее микроархитектоникой рельефом имплантата, что приводит к образованию прочного соединения «костная ткань-имплантат».
Более высокая эффективность остеоинтеграции облученного электронным пучком имплантата обусловлена более высокой пористостью и боле равномерным распределением микротрещин, заполняемыми костной тканью в процессе вживления имплантата в кость, по сравнению с имплантатом, полученным при помощи устройства-прототипа.
Таким образом, по сравнению с прототипом, имплантат имеет возможность равномерно вращаться и возвратно-поступательно перемещаться в продольном направлении, что дает возможность равномерного облучения пучком электронов (ионов) по всей поверхности имплантата. Полученные при помощи заявляемого устройства имплантаты имеют более высокую эффективность соединения с костной тканью. Заявляемая установка может быть использована не только для зубных имплантатов, но и любых других имплантатов, поверхность которых обрабатывается при помощи мощных импульсных ионных или электронных пучков.
Источники информации
1. Патент РФ №2154463, 2000. Покрытие на имплантат из титана и его сплавов и способ его нанесения.
2. Лазерное модифицирование титановых имплантатов с целью улучшения клеточной адгезии. Heinrich K. Dengler Т. Koerner В. Stritzker С. Haczek Н. Deppe. Кафедра Экспериментальной физики IV, Университет Аугсбурга.
//http://www.findpatent.ru/patent/246/2469744.html/
3. Патент РФ №2179001, кл. А61С 8/00, 2001 г. - (Прототип).
Устройство для модификации поверхности имплантатов, включающее в себя камеру с имплантатом, вакуумный насос, натекатель и источник ионов или электронов, отличающееся тем, что в него дополнительно введены реверсивный двигатель, постоянные плоские магниты, перемещающий узел, захват, гайка и два концевых выключателя, причем реверсивный двигатель установлен вне камеры, и на торце его вала размещен один или несколько постоянных плоских магнитов, плоскости которых установлены параллельно плоскости заглушки камеры, выполненной из немагнитного материала, в виде плоского диска и герметично прикрепленной через уплотнительные манжеты к одному из патрубков камеры, при этом в камере с другой стороны заглушки выполнен перемещающий узел, состоящий из двух осей, шарикоподшипника, гайки зажима и двух концевых выключателей, при этом на торце первой оси перемещающего узла также закреплены один или несколько постоянных плоских магнитов, плоскости которых установлены также параллельно плоскости заглушки, причем магниты на торце вала реверсивного двигателя и на торце первой оси вращающего узла установлены на расстоянии 1-2 мм относительно заглушки камеры и расположены так, чтобы их магнитные полюса были взаимно противоположны, при этом первая ось перемещающего узла запрессована во внутреннее кольцо шарикоподшипника, внешнее кольцо подшипника закреплено механически через стойку к стенке камеры, другой конец первой оси перемещающего узла выполнен виде плоского выступа, введенного в шлиц, который выполнен на одном торце второй оси перемещающего узла, на другом торце второй оси перемещающего узла механически закреплен зажим, вторая ось перемещающего узла выполнена в виде цилиндра с резьбой, вкрученной в гайку, механически закрепленную через стойку к внутренней стенке камеры, при этом на образующей поверхности второй оси перемещающего узла установлены элементы концевых выключателей.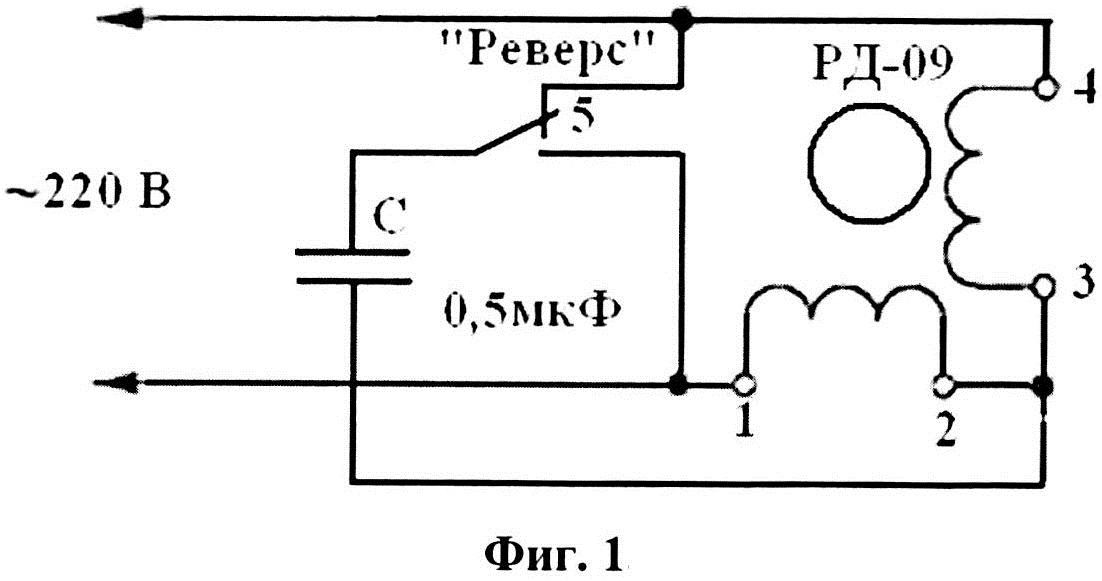
Способ изготовления эмалированных проводов
Способ получения концентрата сапропеля
Способ приготовления бетонной смеси
Способ пропитки обмоток электрических машин
Электроизоляционный лак и способ его нанесения на металлическую основу
Способ пропитки обмоток электротехнических изделий
Способ приготовления бетонной смеси
Способ контроля качества пропитки обмоток электротехнических изделий
Датчик для непрерывного контроля изоляции проводов
Способ контроля и ремонта изоляции проводов
Способ изготовления эмалированных проводов
Способ получения концентрата сапропеля
Способ приготовления бетонной смеси
Способ пропитки обмоток электрических машин
Электроизоляционный лак и способ его нанесения на металлическую основу
Способ пропитки обмоток электротехнических изделий
Способ приготовления бетонной смеси
Способ контроля качества пропитки обмоток электротехнических изделий
Датчик для непрерывного контроля изоляции проводов
Способ контроля и ремонта изоляции проводов

