Результат интеллектуальной деятельности: МНОГОФУНКЦИОНАЛЬНЫЙ СПОСОБ САМОНАВЕДЕНИЯ С ДИСКРЕТНЫМИ КОРРЕКЦИЯМИ ТРАЕКТОРИИ
Вид РИД
Изобретение
Изобретение относится к области автоматического управления при самонаведении движущегося объекта (в дальнейшем «объект») на другой движущийся объект (в дальнейшем «цель»).
Известен способ сближения движущегося объекта при самонаведении по информации о факте визирования цели (патент РФ №2552990), когда траекторию объекта формируют в виде сменяющих друг друга дуговых отрезков, по которым объект перемещается с постоянной угловой скоростью, а смену ее знака производят по заданному управляющему алгоритму при условии совпадения в момент визирования цели направлений вектора скорости объекта и линии визирования.
При этом реализуемый средний угол наклона траектории объекта относительно инерциальной системы координат (средний угол упреждения) не постоянен, даже если условия сближения (значения величин векторов скорости объекта и цели и углов наклона их векторов скорости относительно инерциальной системы координат) неизменны, причем при минимальном сближении может существовать промах, определяемый некоторой константой.
Требуемый технический результат предлагаемого способа заключается в следующих его свойствах:
- постоянный средний угол упреждения траектории объекта в случае неизменности условий сближения,
- минимальный кинематический промах, (а при постоянстве условий сближения - нулевой),
а также:
- отсутствие недопустимых перегрузок на объект в процессе самонаведения;
- возможность сближения с целью на конечном участке в положениях «больше навстречу» или «больше вдогон»;
- обеспечение гарантированного промаха при нештатной ситуации в положениях сближения «сверху» или «снизу»;
- обход материального препятствия (преграды) в процессе самонаведения;
- сближение с целью одним откорректированным дуговым отрезком с нулевым промахом в случае постоянства условий процесса самонаведения.
Дополнительно должно соблюдаться условие совпадения в момент визирования цели вектора скорости объекта и линии визирования.
Для реализации указанных свойств траекторию объекта формируют в виде циклических, сменяющих друг друга дуговых отрезков, по которым объект перемещается с постоянной угловой скоростью, при этом смену ее знака производят в начальный момент цикла: по факту визирования цели при условии совпадения в момент визирования цели вектора скорости объекта и оси максимальной чувствительности локатора, а в середине цикла - по факту равенства углов наклона линий, соединяющей местоположения объекта и цели в начальный момент цикла и наступившего совпадения в результате разворота данный момент.
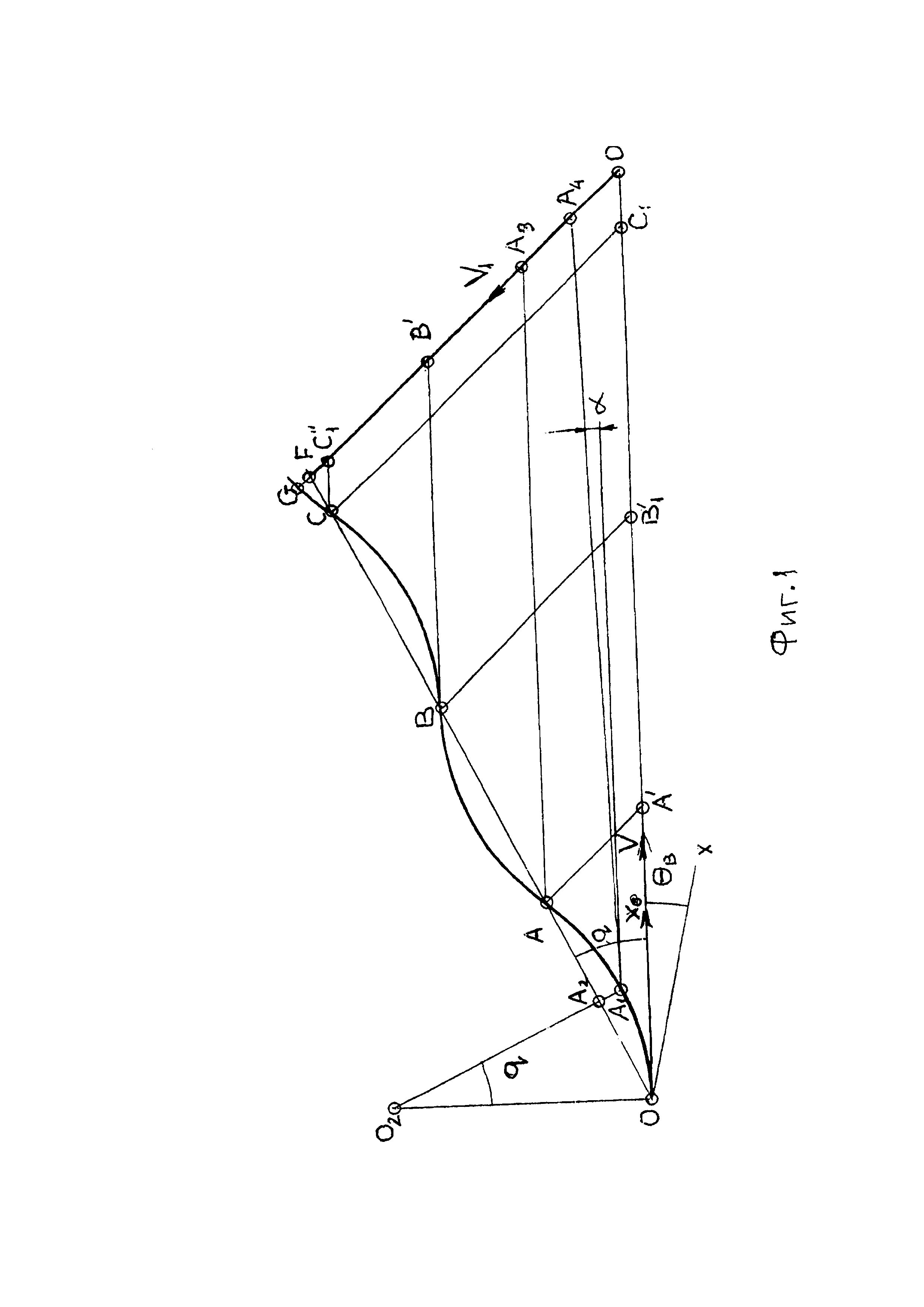
Рассмотрим картину сближения объекта с целью, когда существует промах, фиг. 1, если цель перемещается, например, по траектории 1:O1F, а объект по траектории 2 - OA1ABCG.
На фиг. 1 обозначено:
V - скорость объекта;
V1 - скорость цели;
OO1 - расстояние до цели в «i-1» момент времени, равное ri-1;
ВВ' - расстояние до цели в «i» момент времени, равное ri;
q - средний угол упреждения относительно линии визирования.
Значение q определяется соотношением:

размерность q в радианах,
ω - угловая скорость объекта,
Т - время движения объекта до смены знака
O2O,=О2А1 - радиус разворота объекта, равный R;
Ох0 - направление оси максимальной чувствительности локатора;
A1А4 - линия, соединяющая одномоментное нахождение объекта и цели;
Ох - координата инерциальной системы,
α - угол рассогласования между линиями одномоментного нахождения объекта и цели в начальный момент и текущий;
θв - угол наклона траектории объекта (его вектора скорости) и линии визирования в начале цикла относительно инерциальной системы координат;
FG - статический промах, примерно равный минимальному расстоянию между объектом и целью.
Для обеспечения нулевого промаха предлагается проводить коррекцию траектории объекта по задаваемым алгоритмам с использованием информации о расстоянии до цели:
1) в начале и конце каждого цикла траектории
(в точках О, В, С, …, фиг. 2);
2) в момент смены знака угловой скорости объекта, то есть в начале и конце каждого полуцикла траектории (в точках О, А, В, В7, С, фиг. 2).
Первый вариант сближения: измерение расстояния r производится в начале и конце каждого цикла.
На фиг. 2, представлено сближение объекта, перемещающегося по
траектории с противоположными по знаку и равными по модулю угловыми скоростями ω0, причем смену знака разворота в точке А проводят, когда линия, соединяющая одномоментное нахождение объекта и цели, занимая начальное положение OO1 промежуточное А1А4, займет в точке А положение АА3, параллельное начальному. При этом формируется средний угол упреждения qx относительно инерциальной системы координат а угол наклона траектории объекта (вектора его скорости) примет величину θсм=2qx.-θв.
Значение величины расстояния отрезка
OB'=OO1-ВВ',
а значение отрезков

То есть:

ri-1 - расстояние до цели в предыдущий момент,
ri - расстояние до цели в текущий момент.
Вместе с тем, количество полуциклов n траектории объекта до цели после измерения текущего расстояния ri при условии неизменности условий сближения равно:

а в общем виде это соотношение с учетом (1): выглядит так:



 - целая часть числа полуциклов n,
- целая часть числа полуциклов n,
m - дробная часть n, (m<1).
Рассмотрев геометрические соотношения в фигуре OFO1, можно сделать вывод, что каждым линейным отрезкам: OА, АВ, … В7С, равным между собой при постоянных параметрах сближения, соответствуют равные отрезки OA', A'B', … B7'C1, фиг. 1 и 2, общим целым числом  , а оставшаяся дробная часть характеризует значения добавки к указанным величинам линейных отрезков.
, а оставшаяся дробная часть характеризует значения добавки к указанным величинам линейных отрезков.
При этом верно соотношение:

Принимая во внимание, что:
OA'=B7'C1


Вместе с тем, из кинематических соотношений при перемещениях объекта:


L - длина отрезка прямой, стягивающий концы дугового отрезка, по которому объект перемещается с постоянной угловой ω и линейной V скоростями, постоянными радиусом разворота R и средним углом упреждения q, вытекает, что:

Окончательно, с учетом (4), (7), (имея в виду, что до проведения коррекции угловая скорость объекта имела заданное значение ω0, радиус разворота был равен R0, длина прямой линии, стягивающей концы дуговых отрезков OA, АВ, … - L0, при постоянном значении среднего угла упреждения q), значения Lкорр, Rкорр и ωкорр для корректирующего воздействия при перемещении цели по траектории 1 устанавливают из (4) в виде:



С учетом (3):

из (9) и (10):



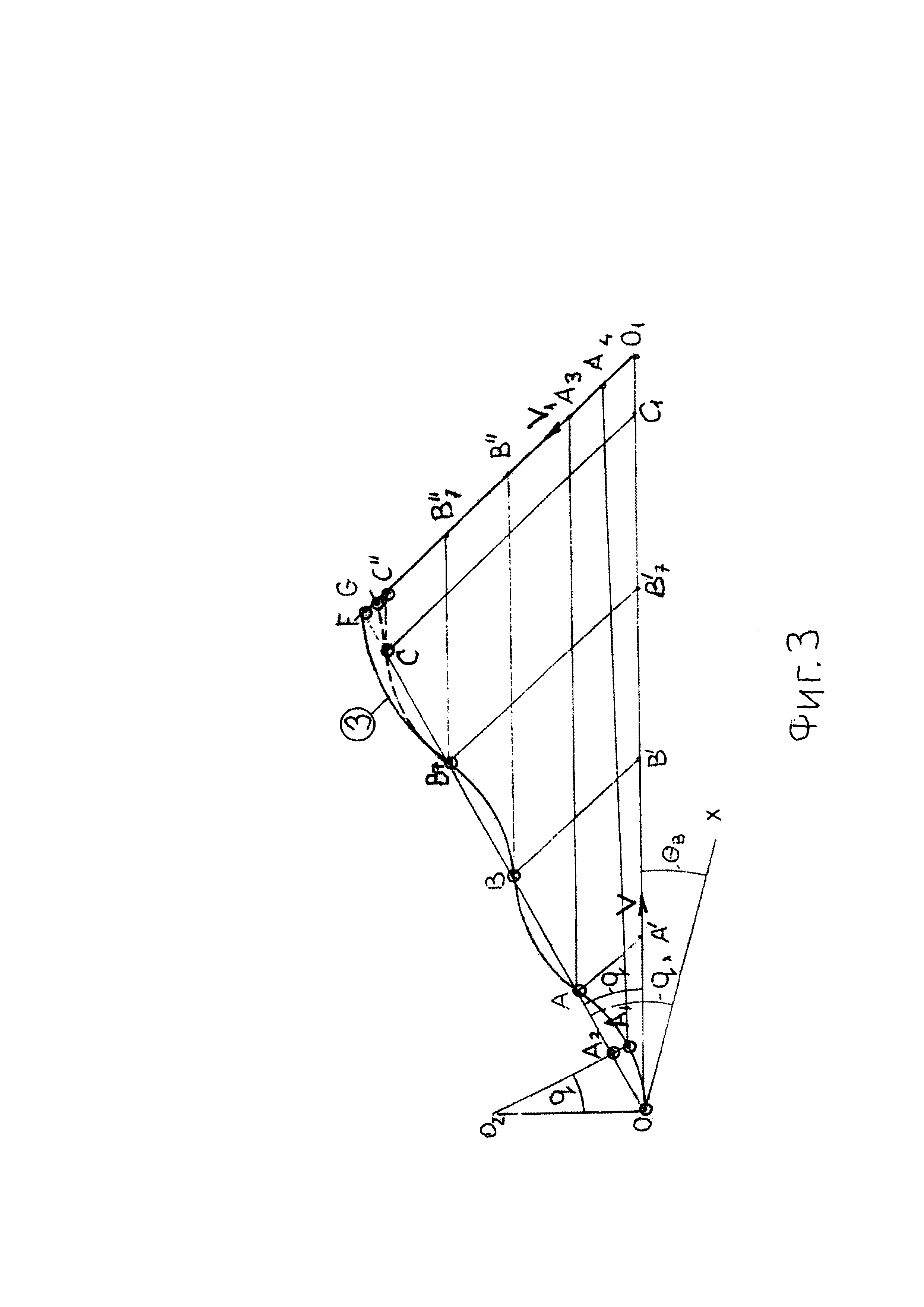
На фиг. 3 показана коррекция по алгоритму (10) в конце процесса сближения:
ri-1=175 мм
ri=94 мм
L-0=30
R0=32 мм

[n]=2
m=0,32
Значение корректирующего воздействия определяется:
 (размерность: радиан в секунду или минуту)
(размерность: радиан в секунду или минуту)
Геометрически - это траектория 3:
Lкорр=39,6 мм
Rкорр=42,2 мм
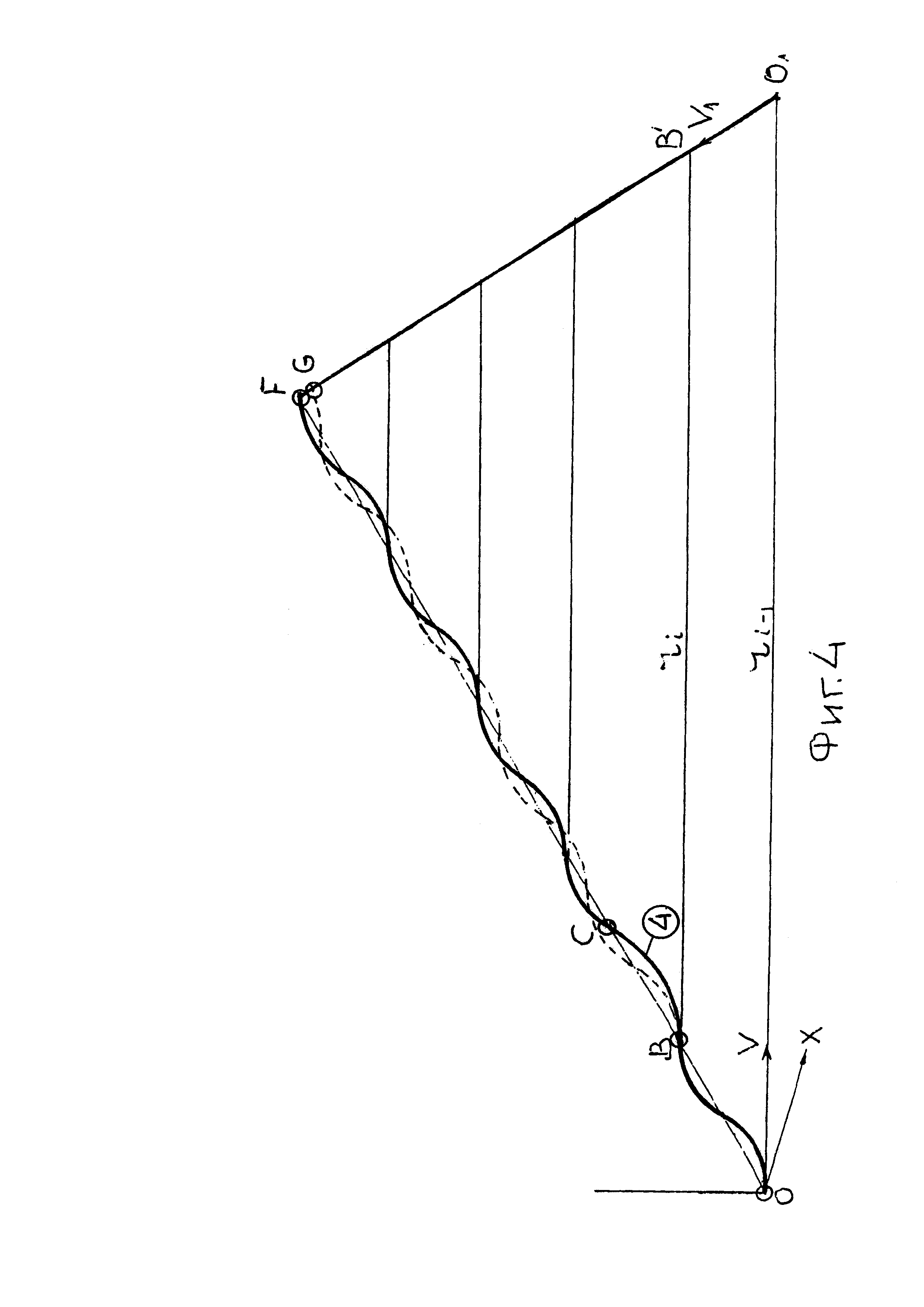
Можно проводить коррекции и в начале процесса самонаведения, при этом вычисления и реализация корректирующего изменения траектории объекта по алгоритму (10) проводят сразу после получения информации о расстоянии до цели: фиг. 4. При отсутствии коррекции промах - FG. Расстояние ri-1 равно 250 мм, расстояние ri составляет 203 мм. Минимальный радиус разворота R0 равен 19 мм. Число полуциклов n равно:

Для осуществления нулевого промаха требуется коррекция:
Rкорр=R0(1+m)=31,1 мм, это траектория 4.
Итак, число полуциклов при сближении с целью после коррекции должно выражаться целым числом (m=0).
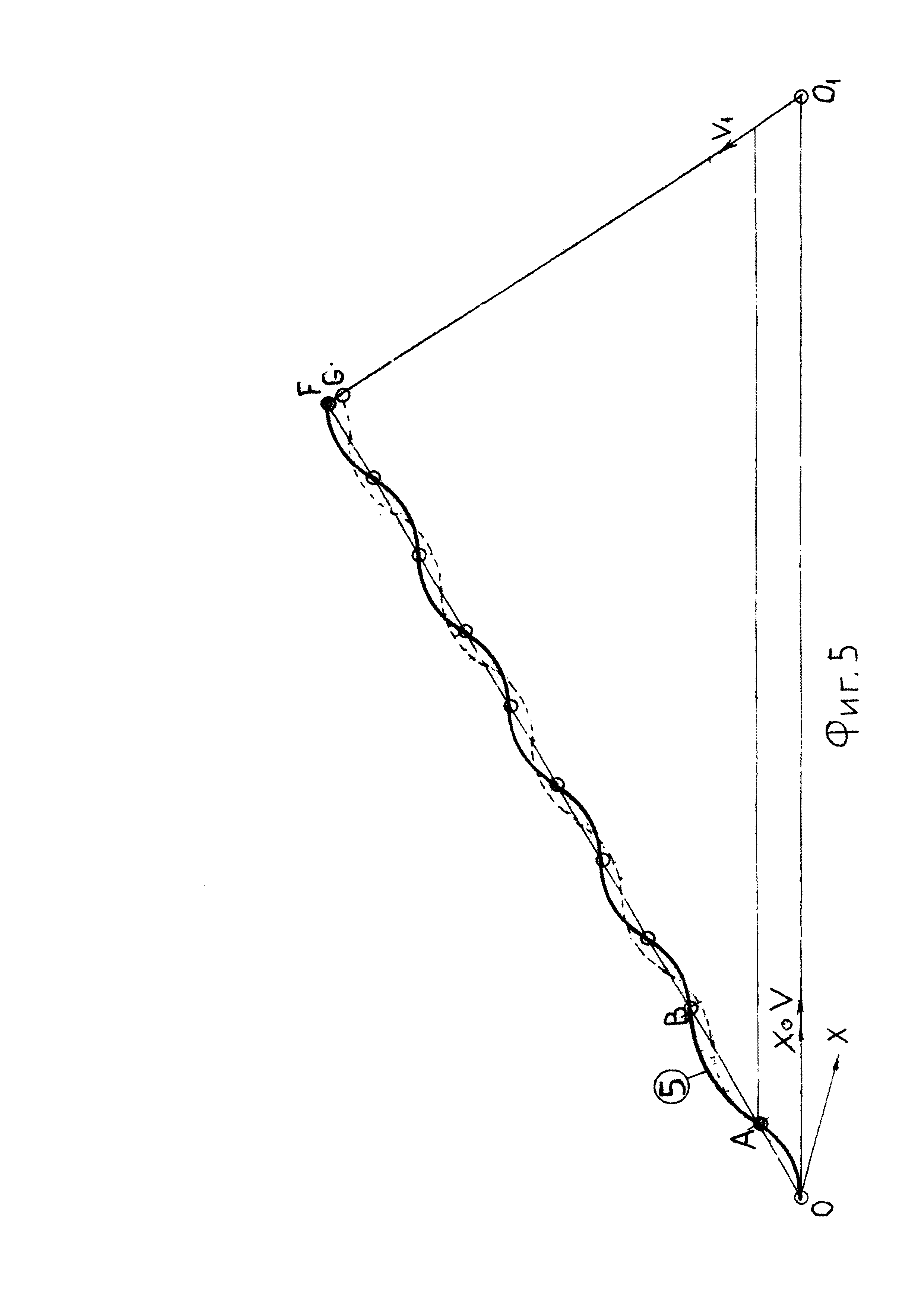
Второй вариант сближения: измерение расстояния r' производится в начале и конце полуцикла траектории.
В этом случае все выводы, изложенные выше, сохраняются, только измерения расстояния проводятся чаще, из-за чего повышается точность наведения при маневрировании цели.
При этом количество полуциклов определяется

где:
r'i-1 - значение величины расстояния до цели в начале полуцикла сближения;
r'i - значение расстояния до цели в конце полуцикла,
или:

Алгоритмы для коррекции траектории выглядят, как нетрудно убедиться, так:
Lкорр=L-0(1+m)
Rкорр=R0(1+m)

то есть Lкорр и Rкорр прямо пропорционально значению


 а
а
ωкорр обратно пропорционально ему:

На фиг. 5 показана в этом случае траектория 5. Траектория коррекции такая же, как и на фиг. 4 по модулю, но противоположна по знаку.
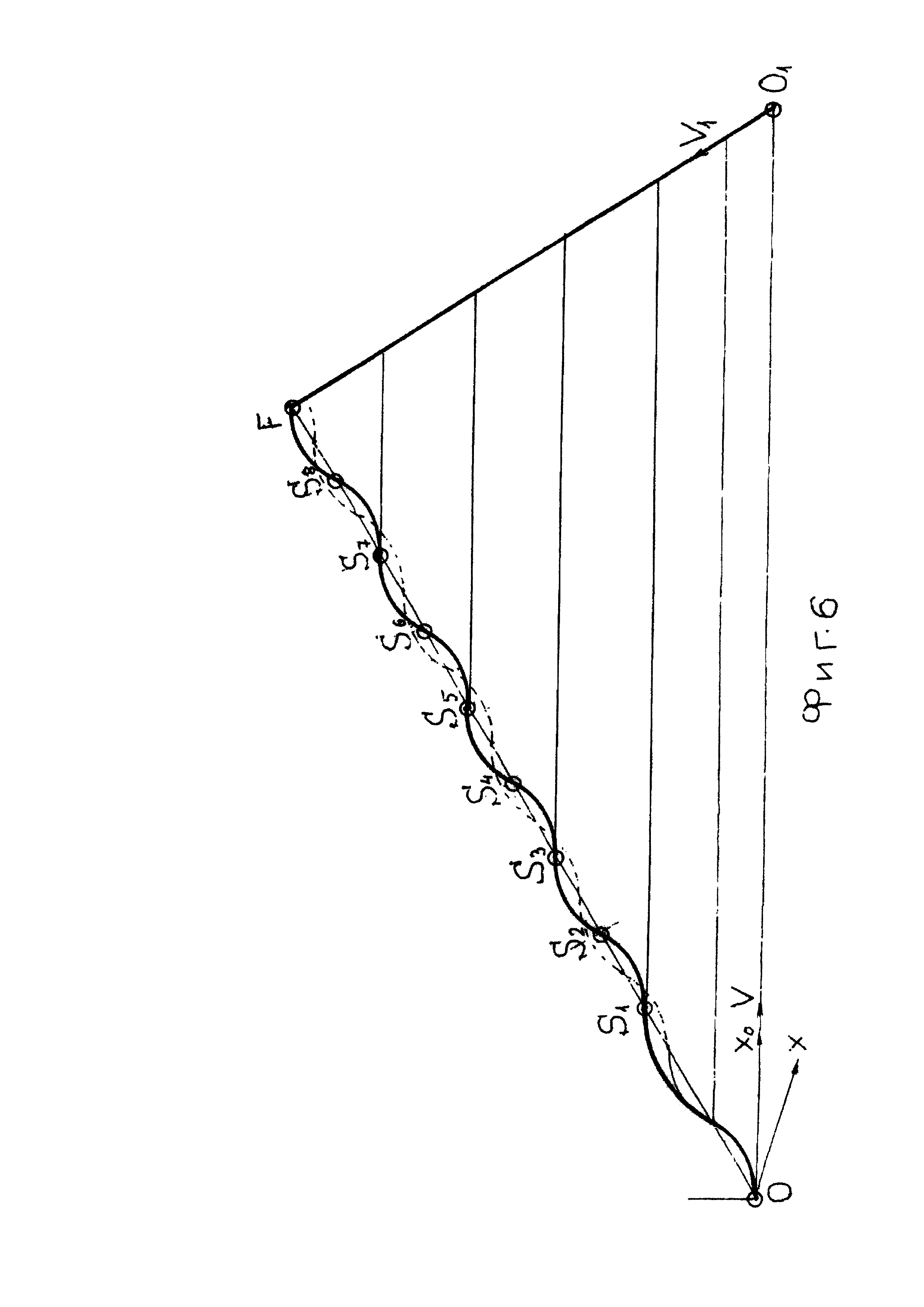
Важно отметить, что окончательно сблизиться с целью при самонаведении можно в положениях, «больше навстречу» - сближение объекта с целью по откорректированной траектории под углом, меньшим среднего угла упреждения траектории объекта q, или «больше вдогон»: под углом, большим q. Положение «больше навстречу» реализуется при:
а) начале движения объекта по откорректированной траектории из текущего положения в начале цикла сближения при четном количестве полуциклов до цели;
например, на фиг. 6 после коррекции, начиная с точки S1, которая является начальным циклом траектории S1 S2 S3 … до встречи с целью в точке F, объект совершит 8 полуциклов; согласно расположения отрезка S8F объект сблизится с целью в положении «больше навстречу»;
б) начале движения объекта по откорректированной траектории из текущего положения в середине цикла сближения при нечетном количестве полуциклов до цели;
например, на фиг. 7 объект совершает 7 полуциклов до встречи с целью, начиная с середины цикла BS1 в точке S0.
Положение «больше вдогон» реализуется при:
в) начале движения объекта по откорректированной траектории из текущего положения в начале цикла сближения при нечетном количестве полуциклов до цели;
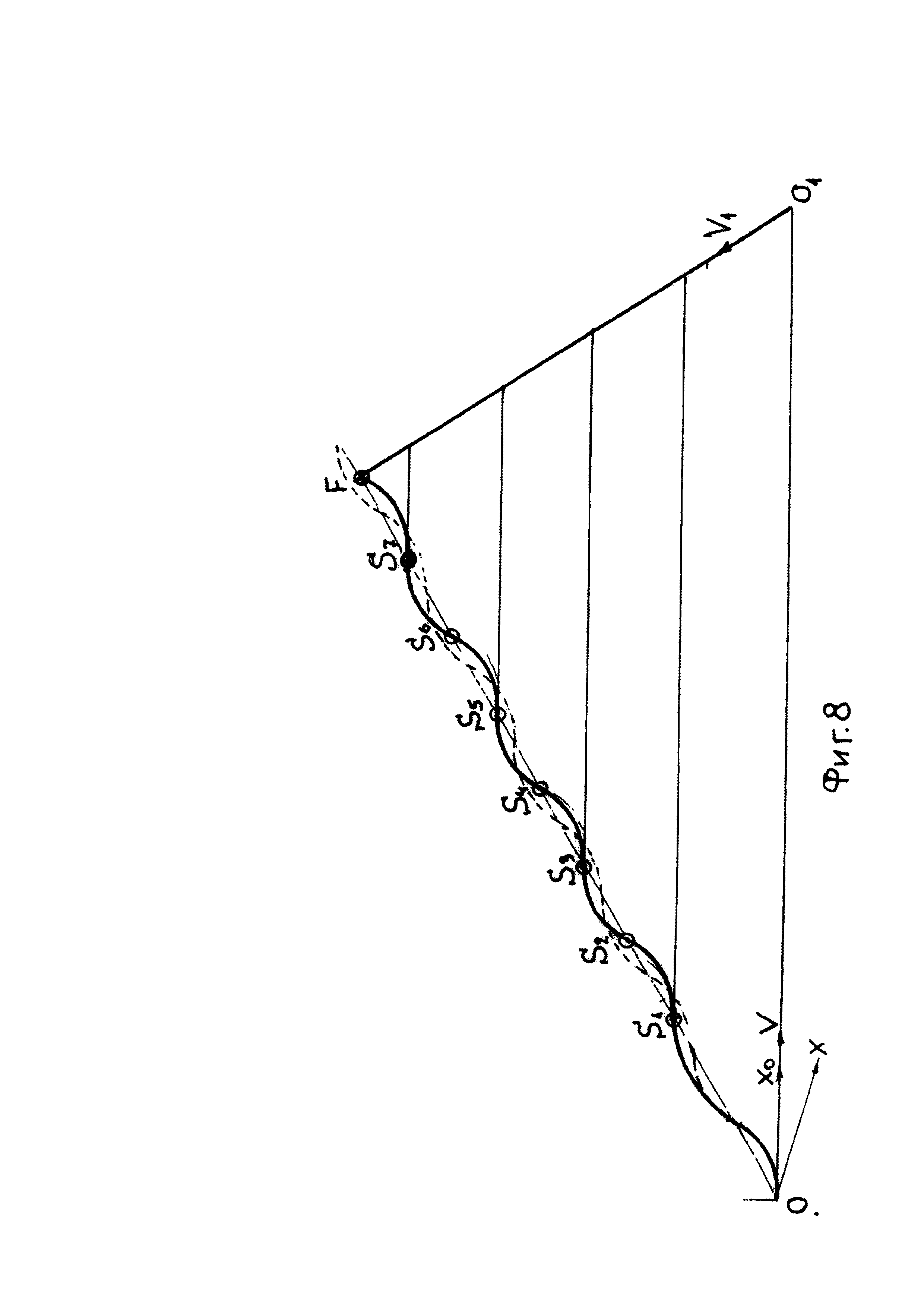
например, на фиг. 8 отрезок S7F показывает сближение в положении «больше вдогон» при количестве полуциклов 7, с начала цикла в точке S1
г) начале движения объекта по откорректированной траектории из текущего положения в середине цикла сближения при четном количестве полуциклов до цели;
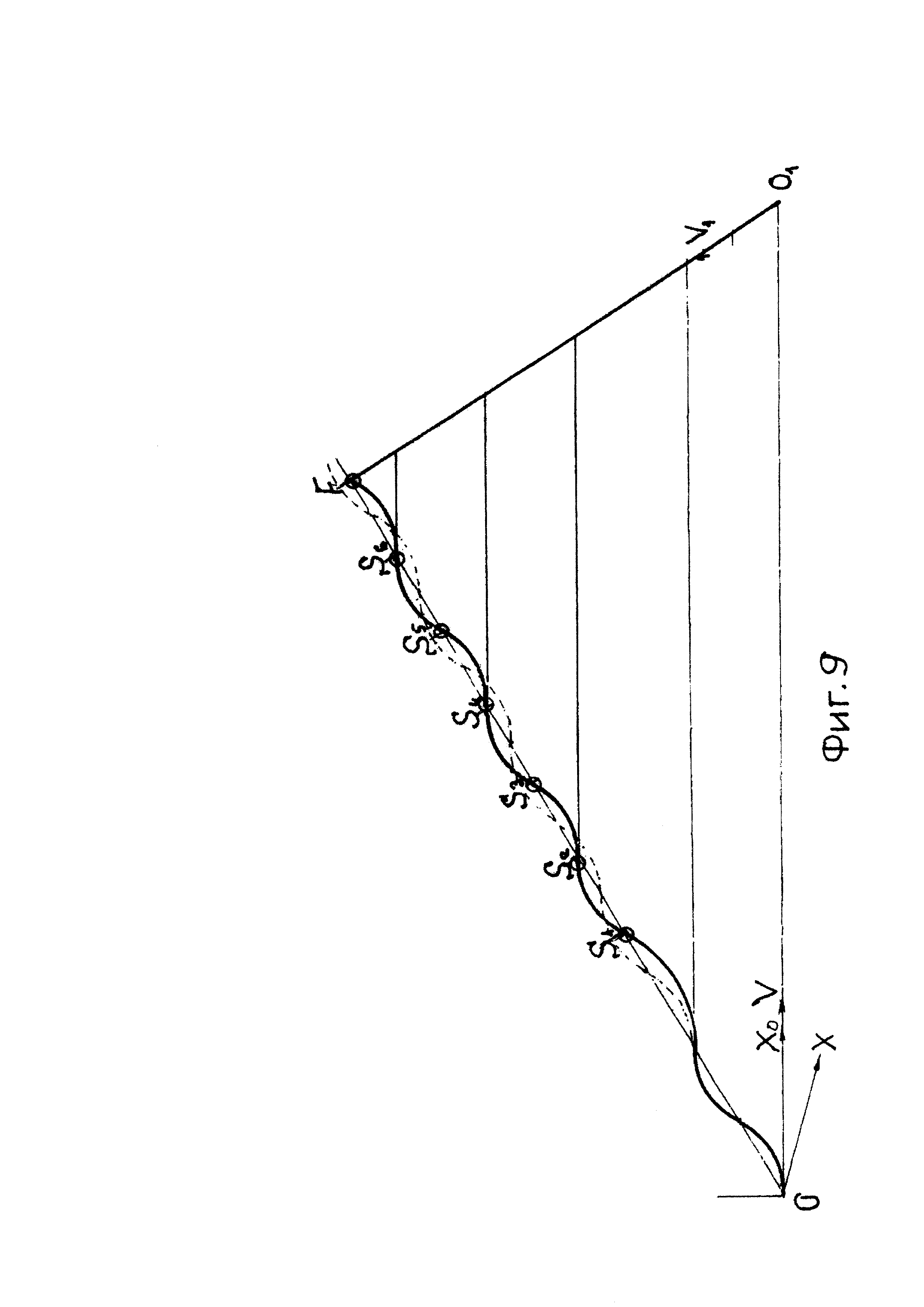
например, на фиг. 9 имеется 6 полуциклов при сближении «больше вдогон», начиная с середины цикла в точке S1.
Следует отметить, что количество полуциклов до цели при необходимости легко изменить с четного на нечетное и, наоборот, произведя очередной разворот с параметрами:


nч - значение четного количества полуциклов траектории объекта
nнч - значение нечетного количества полуциклов траектории объекта.
Другими словами, при одноразовом развороте объекта в необходимый момент с половиной действующего значения угловой скорости (удвоенном значением радиуса разворота), количество полуциклов до цели уменьшится на единицу, а четность изменится с четного на нечетное, и, наоборот, если оно было нечетным, то оно уменьшится на единицу и станет четным.
На фиг. 10 показано перемещение объекта по траектории OF, состоящей из нечетных 9 полуциклов (показано пунктиром) и 8 четных полуциклов (сплошная линия) построенных по алгоритму (13); траектория 10 - это перемещение объекта с половиной значения ω0.
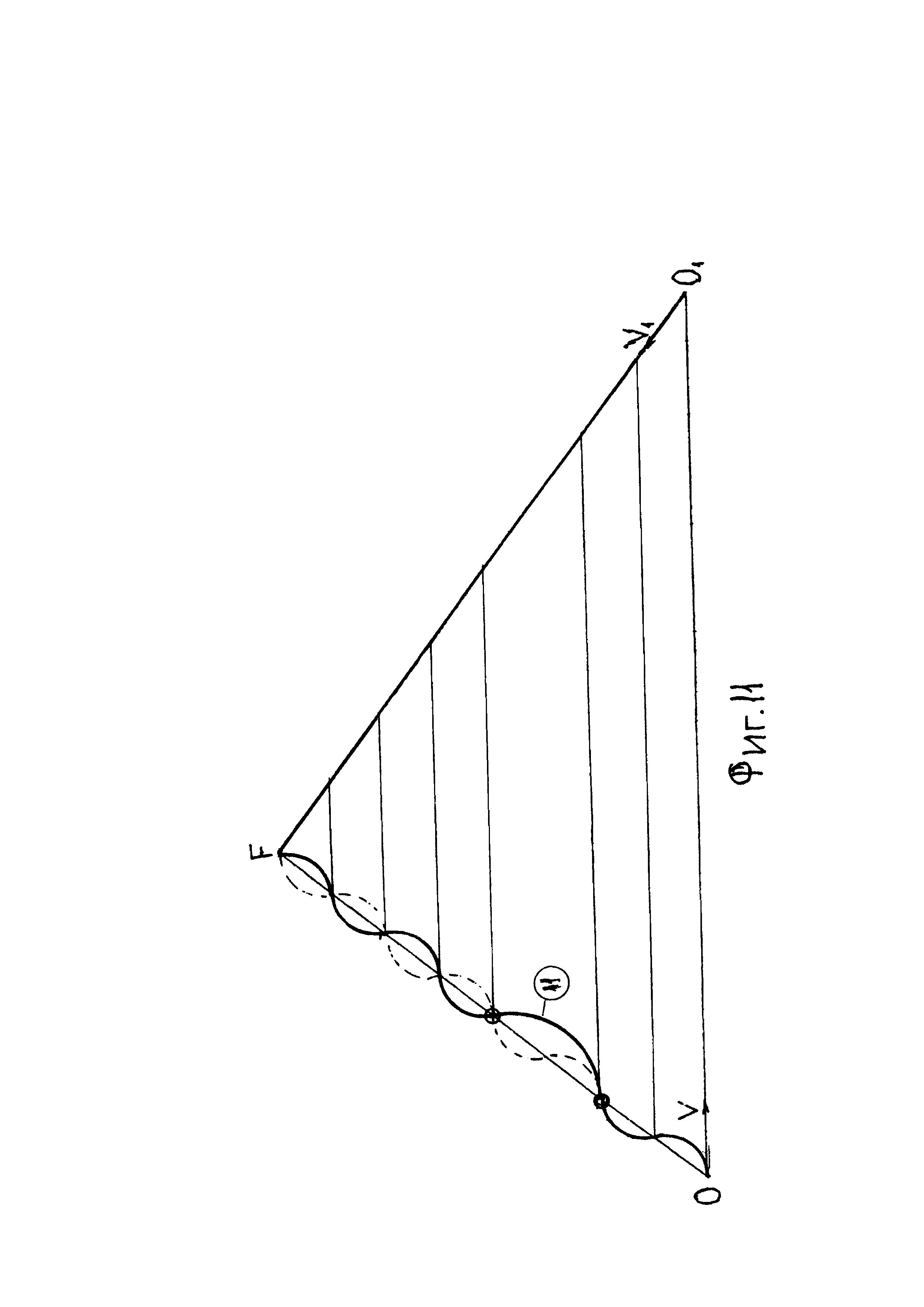
На фиг. 11 показана коррекция 11 (перемещение объекта с угловой скоростью ω=0,5 ω0) для изменения числа полуциклов траектории с четного количества 8 на нечетное 7 по алгоритму (14).
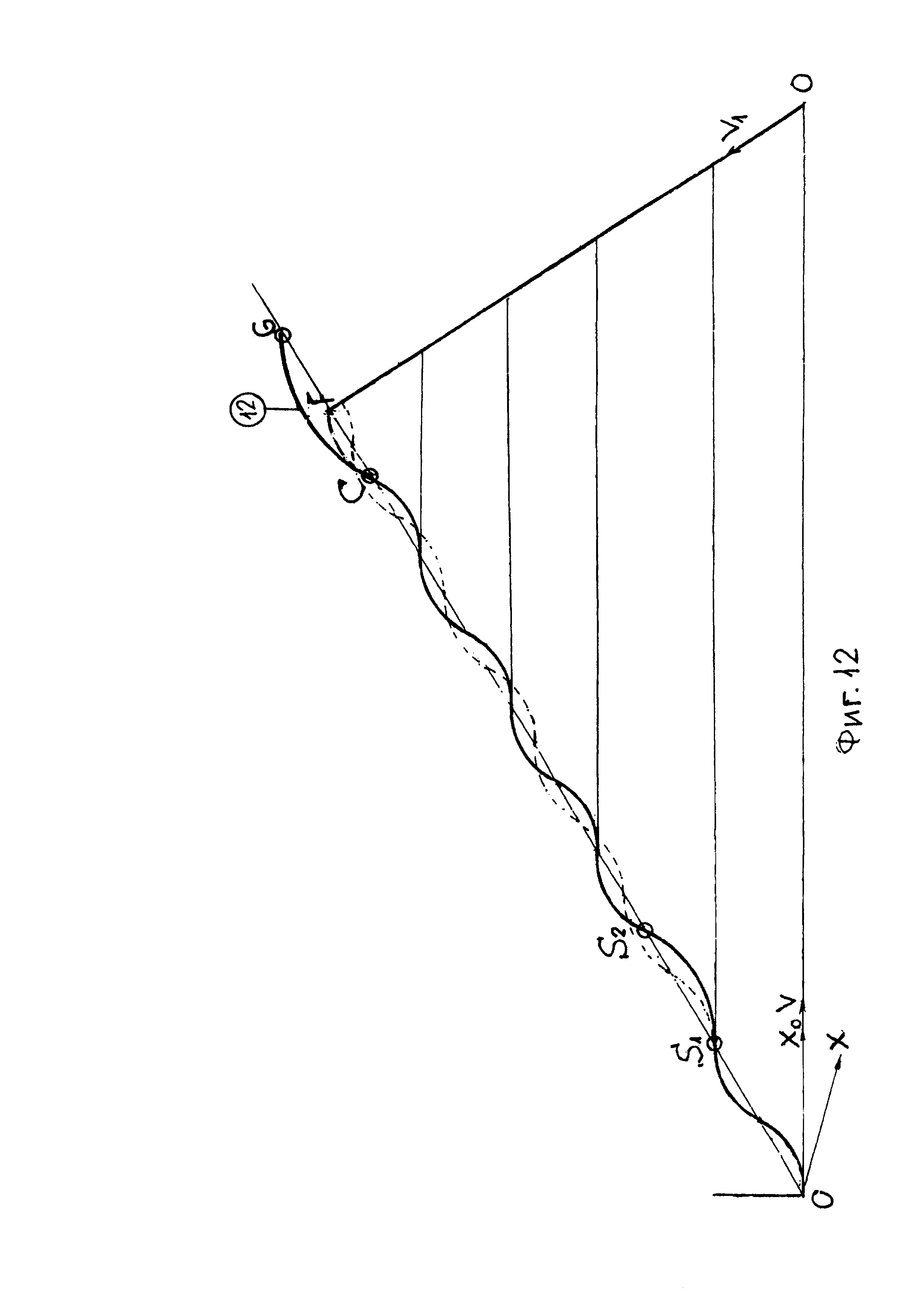
Предлагаемый способ самонаведения обеспечивает не только сближение с целью в заданном положении при методическом нулевом промахе, но и при заданной необходимости обладает возможностью гарантировано сделать промах, то есть пройти мимо цели, причем - с заданной стороны: «сверху», или «снизу».
Потребность в реализации данной возможности возникает при появлении критической ситуации, например, когда объект сам становится целью.
Для осуществления необходимой коррекции необходимо придать объекту угловую скорость ωпр, использовав сначала формулы управляющих коррекций (10) или (12) для создания нулевого промаха, а затем уменьшить угловую скорость при сближении с объектом или в два раза:

или в несколько раз:

n' - количество полуциклов, заменяемых одним дуговым отрезком.
Порядок проведения корректирующих воздействий в данном случае следующий:
- проведение подсчета количества n полуциклов до цели по формулам (2) или (11)
- реализация корректирующего воздействия по формуле (10), учитывая заданное положение «больше навстречу» или «больше вдогон»
- определение номера цикла, с которого начинается финальное корректирующее воздействие
- проведение финального корректирующего воздействия по формуле (15) или (16).
При организации промаха «сверху» по алгоритму (15) первоначальную коррекцию организуют в позиции сближения «больше навстречу».
При организации промаха «снизу» по этому алгоритму первоначальную коррекцию организуют в позиции «больше вдогон».
На фиг. 12 показана траектория объекта при реализации промаха «сверху». После первоначальной коррекции в точке S1, от точки S2 до точки F насчитывается 7 циклов. На шестом цикле в точке С проводят окончательную коррекцию в соответствии с (15): реализуют траекторию 12.
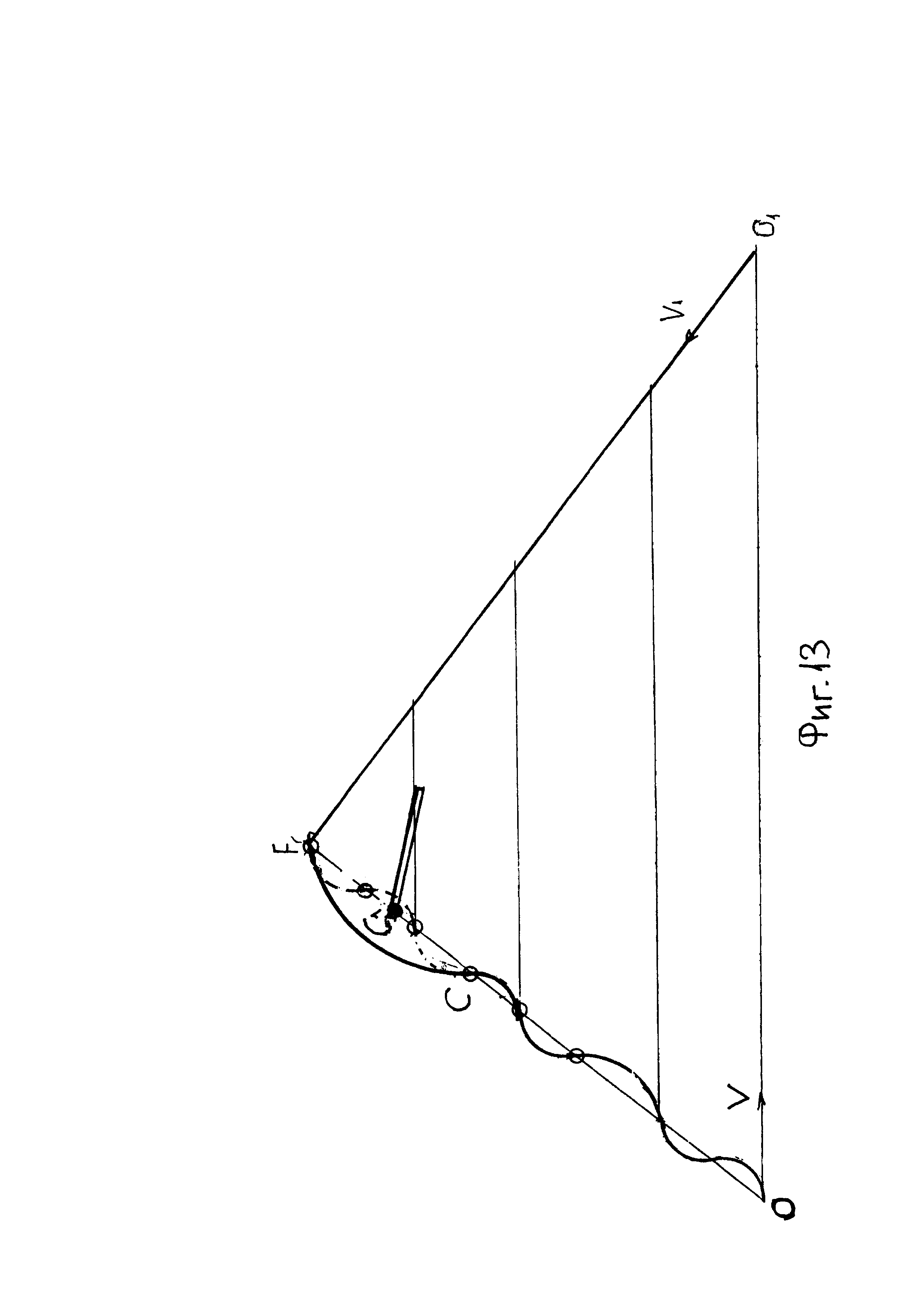
Если на пути движения объекта находится препятствие, то для его обхода используют формулу запланированного промаха «справа» или «слева», реализовав его после подсчета количества полуциклов N до препятствия:

L - расстояние до препятствия,
L0 - линейное расстояние одного полуцикла, равное:
L0=2 R0 sin q, где R0 известный радиус разворота объекта.
На фиг. 13 показан обход препятствия слева после коррекции в точке В.
Отметим, что при откорректированной траектории и постоянных условиях самонаведения можно сблизиться с целью одним полуциклом, например, по дуговой траектории 14, используя формулу:

где n - количество полуциклов до встречи с целью.
Траектория показана на фиг. 14:
n=8,
угловая скорость  ,
,
радиус разворота R=8R0=160 мм.
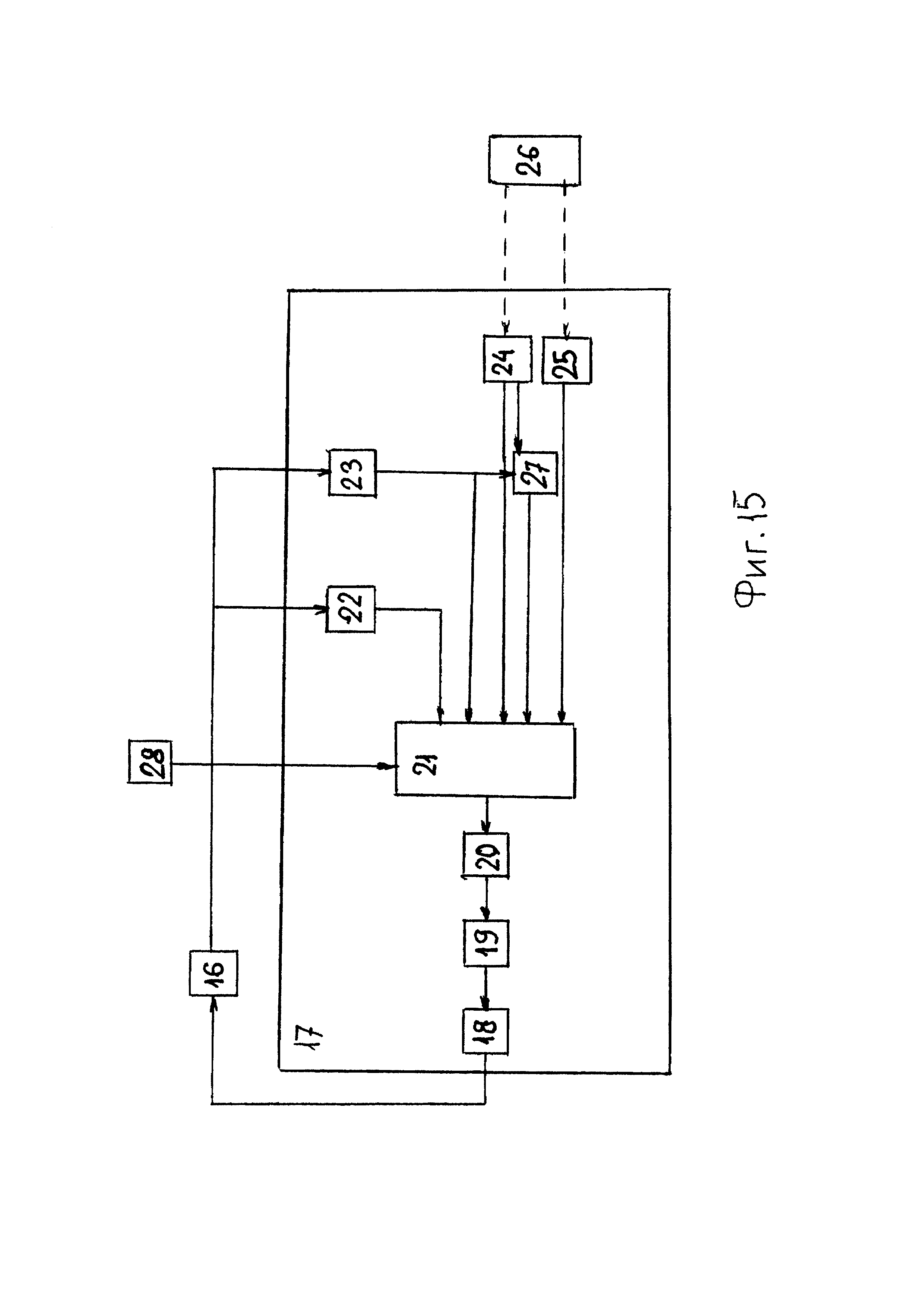
Управление объектом при аппаратной реализации предлагаемого способа осуществляется, например, с помощью функциональной схемы, представленной на фиг. 15, на которой введены следующие обозначения:
16 Объект; с собственной системой стабилизации;
17 Система управления объектом, организующая самонаведение;
18 Рулевой привод - реализует управляющее воздействие на объект;
19 Преобразователь - осуществляет управление рулевым приводом по командам БЭВМ;
20 Быстродействующая электронная вычислительная машина БЭВМ -управляет процессом наведения по заложенным алгоритмам;
21 Устройство обмена УО - переводит поступающую информацию на язык ЭВМ;
22 Измеритель значения угловой скорости объекта ω;
23 Прибор, реализующий инерциальную систему координат, оси которой являются началом отсчета углов;
24 Локатор цели - фиксирует факт визирование цели, когда вектор скорости объекта направлен в сторону цели;
25 Радар - осуществляет измерение расстояния до цели;
26 Движущаяся цель;
27 Устройство сравнения величин углов относительно инерциальной системы координат - осуществляет сравнение величин углов и выдачу сигнала о равенстве их значений для смены знака разворота объекта.
28 Блок ввода данных по условиям сближения.
По программе, записанной в БЭВМ 20, организуют циклические, сменяющие друг друга дугообразные развороты объекта 16, для чего после получения сигнала о факте визирования цели БЭВМ запоминает значение угла наклона траектории в этот момент и подает команду через преобразовательное устройство 19 на рулевой привод 18, который выдает управляющее воздействие δ для разворота объекта с заданной угловой скоростью; также запоминаются расчетные значения количества и четности дуговых отрезков до цели.. Когда угол наклона линии, соединяющей точки одновременного расположения объекта и цели относительно инерциальной системы координат снова станет равным первоначально запомненному значению, знак угловой скорости меняют на противоположный, тем самым замыкая первый полуцикл. Следующую смену знака разворота по окончании цикла осуществляют в момент совпадения углов наклона относительно инерциальной системы координат оси локатора и вектора скорости объекта по факту визирования цели.
Одновременно, в момент смены знака разворота или по окончании цикла производят коррекцию траектории с учетом введенных начальных данных по алгоритмам (10) или (12), а также осуществляют положение при окончательном сближении - «больше вдогон» или «больше навстречу», а еще, если было нужно, обеспечивают гарантированный промах и преодоление препятствий.
Все эти корректирующие воздействия проводятся расчетными алгоритмами БЭВМ автоматически с использованием предварительных условий, полученных перед началом сближения от блока 28.
В заключение следует отметить, что все коррекции данного метода самонаведения проводятся с изменением значений величины угловой скорости объекта в сторону их уменьшения, исключая тем самым появления недопустимых перегрузок, воздействующих на объект.
Данное изобретение может быть применено как самостоятельный способ самонаведения, так и в сочетании с другими способами, а также, например, в компьютерных играх.
Способ сближения движущегося объекта при самонаведении по информации о факте визирования цели
Способ самонаведения движущегося объекта по информации о факте визирования цели и устройство для его реализации (варианты)
Способ сближения движущегося объекта при самонаведении по информации о факте визирования цели
Способ самонаведения движущегося объекта по информации о факте визирования цели и устройство для его реализации (варианты)
Низколегированная сталь

