Результат интеллектуальной деятельности: УСТРОЙСТВО ОЦЕНКИ ПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ТЕЛА И СПОСОБ ОЦЕНКИ ПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ТЕЛА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству оценки положения движущегося тела и способу оценки положения движущегося тела.
Уровень техники
[0002] В патентном документе 1 сопоставление краев между изображением края, генерируемым из изображения, захватываемого камерой, и виртуальным изображением, генерируемым из известной трехмерной карты с использованием фильтра частиц, выполняется для каждой частицы, и положение движущегося тела стохастически оценивается из вероятностного распределения, причем вероятность увеличивается, когда количество перекрывающихся краев увеличивается, и вероятность уменьшается, когда количество перекрывающихся краев уменьшается.
Документы известного уровня техники
Патентные документы
[0003] Патентный документ 1: Выложенная японская патентная заявка № 2010-60451.
Сущность изобретения
Проблемы, решаемые изобретением
[0004] Однако в известном уровне техники, описанном выше, так как вероятность вычисляется на основе степени перекрытия краев, даже если параметр частицы близок к истинному положению движущегося тела, если параметр положения частицы даже незначительно смещен от истинного положения, существует проблема, что вероятность частицы сильно снижается, в результате чего оценка становиться нестабильной.
Задачей настоящего изобретения является обеспечение устройства оценки положения движущегося тела и способа оценки положения движущегося тела, который может стабильно оценивать положение движущегося тела.
Средство для решения проблемы
[0005] В настоящем изобретении изображение края и виртуальное изображение для каждой частицы сравниваются, более высокое значение оценки присваивается, если имеется большее количество перекрывающихся краев между изображениями, и более высокое значение оценки присваивается, если имеется большее количество краев, которые не являются перекрывающимися краями, и для которых расстояние от края до края, которое представляет собой расстояние между краем в изображении края и краем в виртуальном изображении, меньше или равно заданному значению.
Эффект изобретения
[0006] В связи с этим положение движущегося тела может стабильно оцениваться.
Краткое описание чертежей
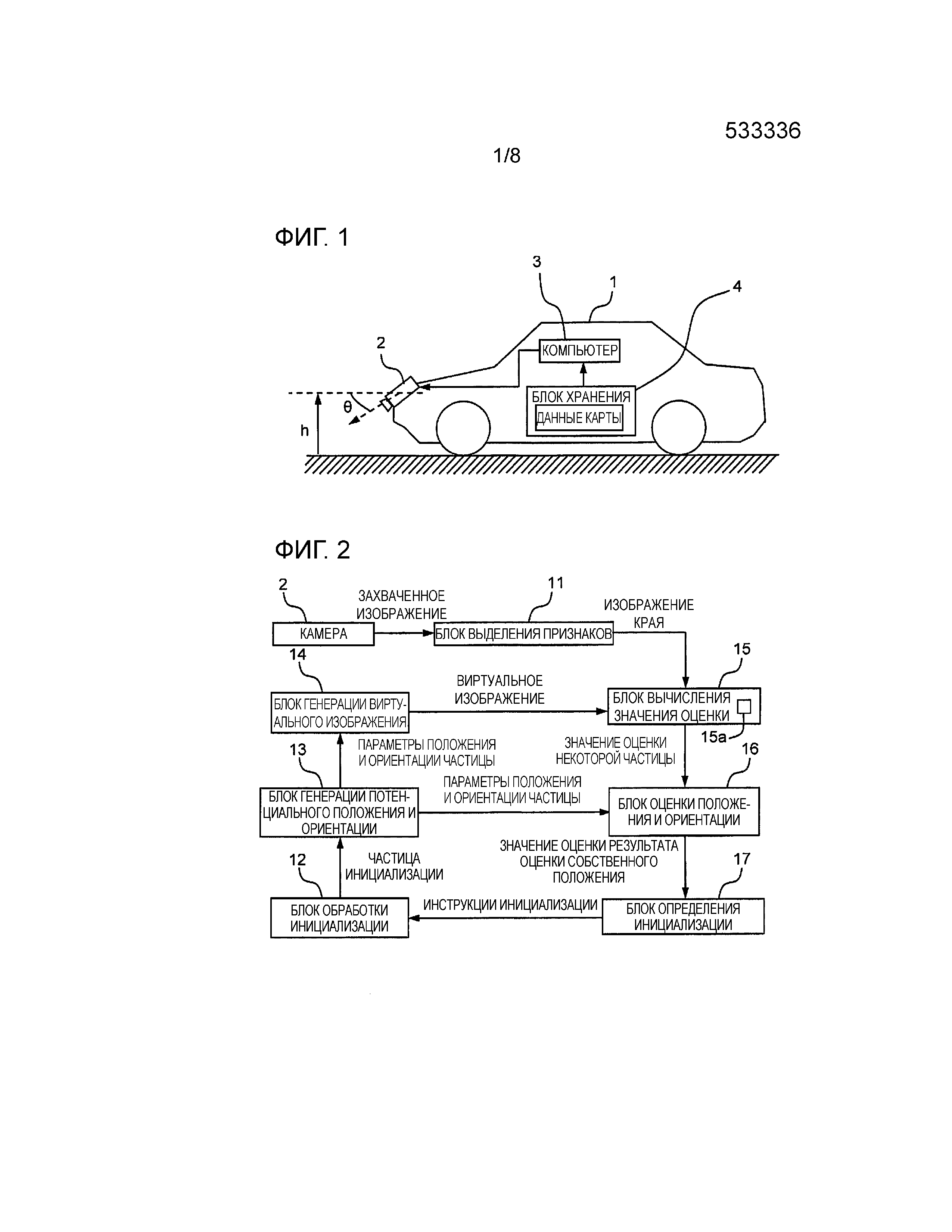
[0007] Фигура 1 представляет собой блок-схему устройства оценки положения движущегося тела в соответствии с первым вариантом выполнения.
Фигура 2 представляет собой блок-схему управления оценкой собственного положения в компьютере 3 первого варианта выполнения.
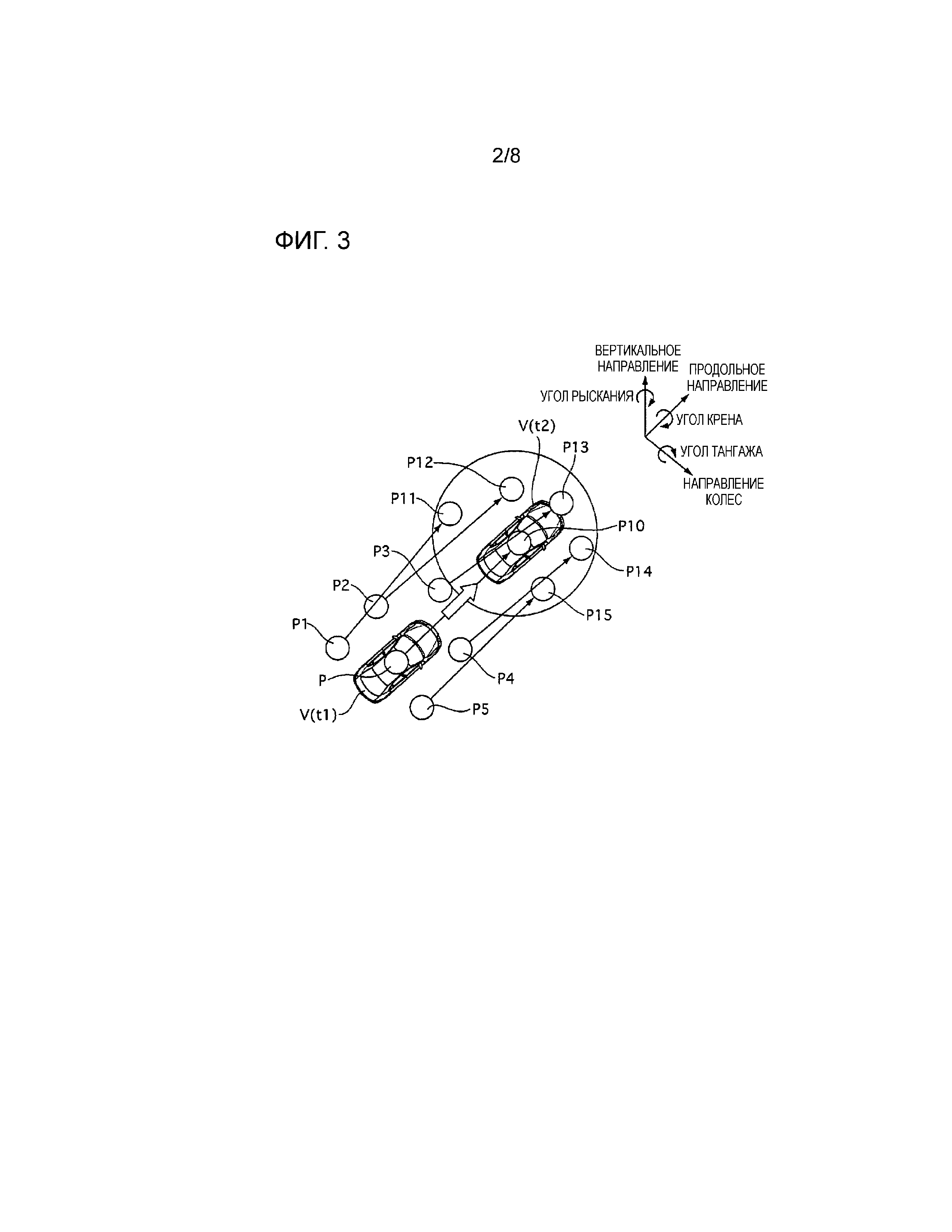
Фигура 3 представляет собой пояснительная вид, иллюстрирующий способ рассеивания частиц с помощью устройства оценки положения движущегося тела первого варианта выполнения.
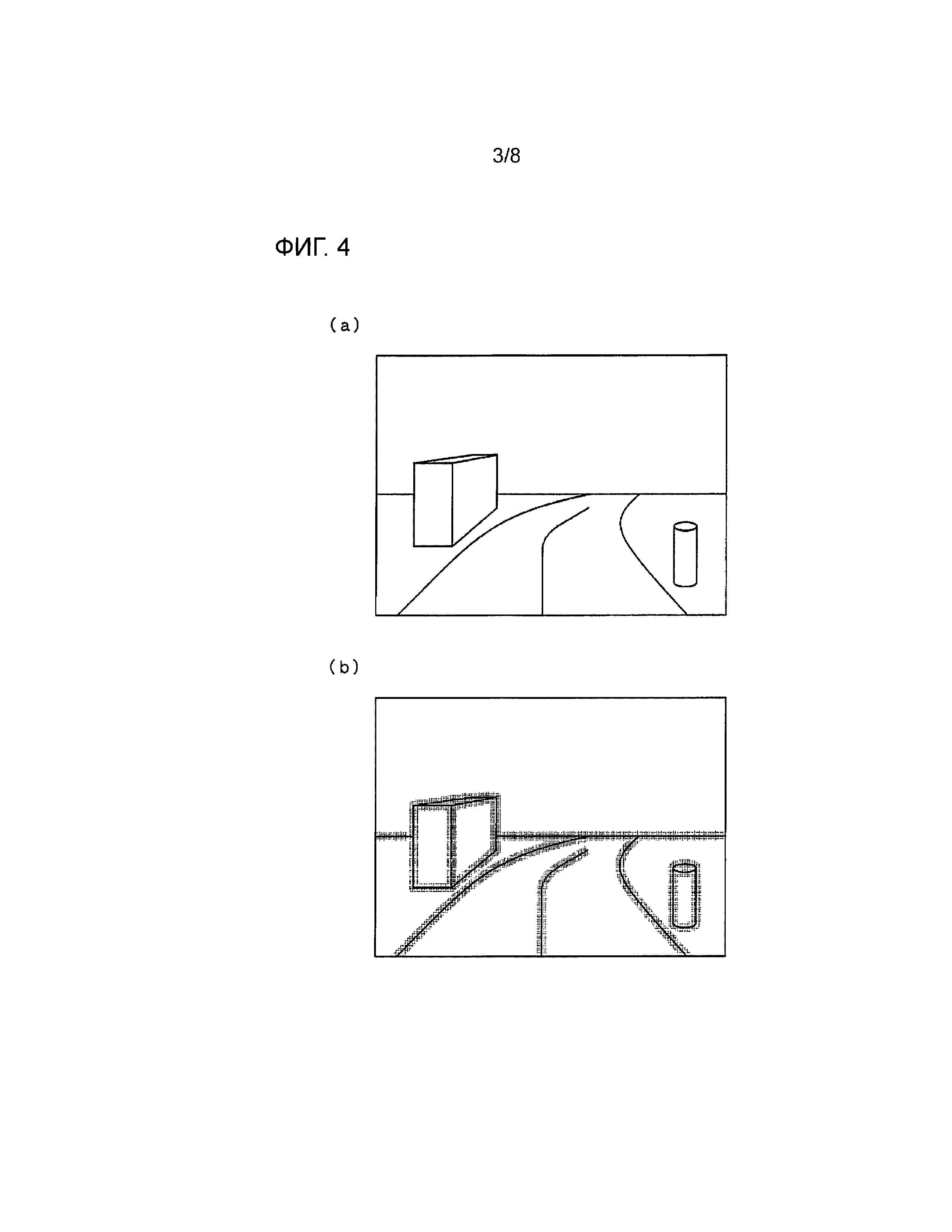
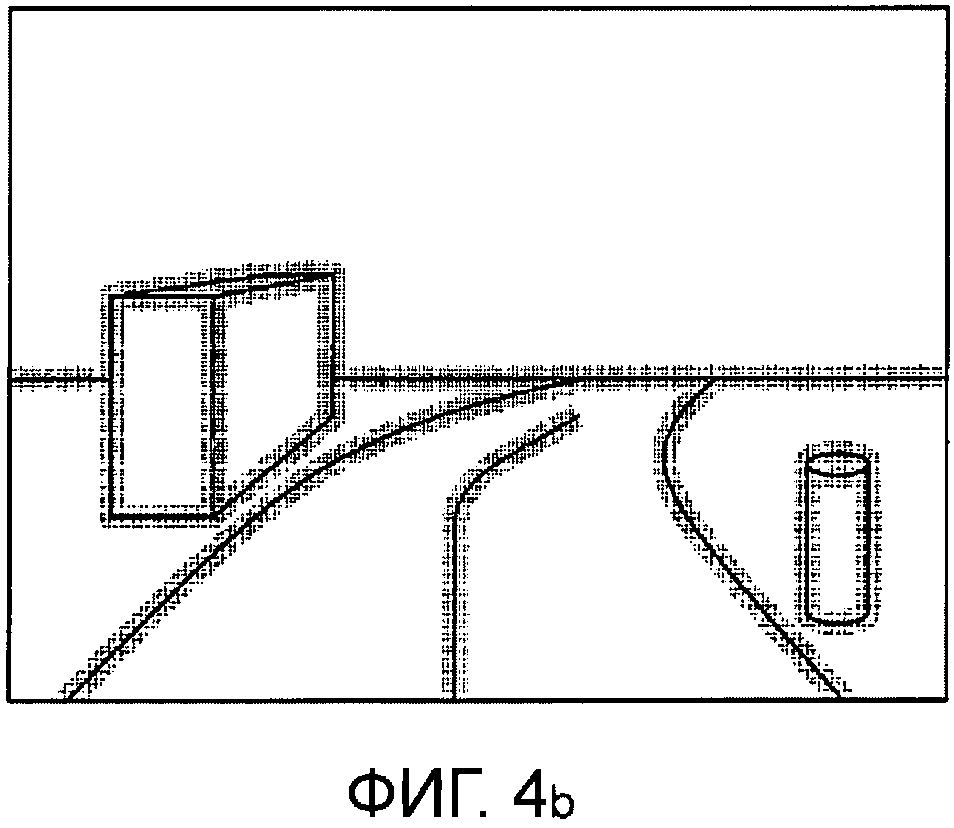
Фигура 4 представляет собой пояснительная вид, иллюстрирующий способ вычисления корректирующего значения оценки, соответствующего количеству пикселей первого варианта выполнения.
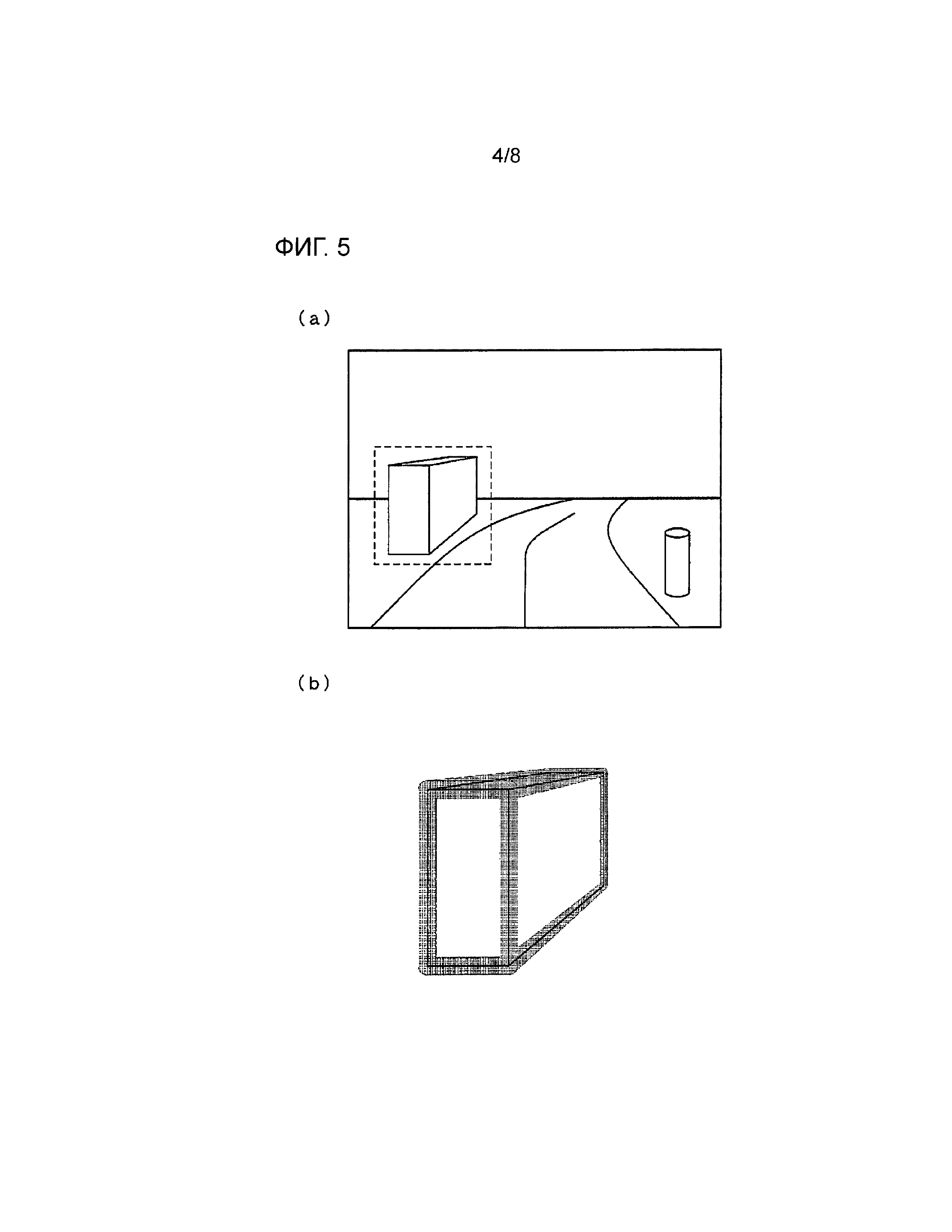
Фигура 5 представляет собой пояснительная вид, иллюстрирующий способ вычисления корректирующего значения оценки, соответствующего фактическому расстоянию первого варианта выполнения.
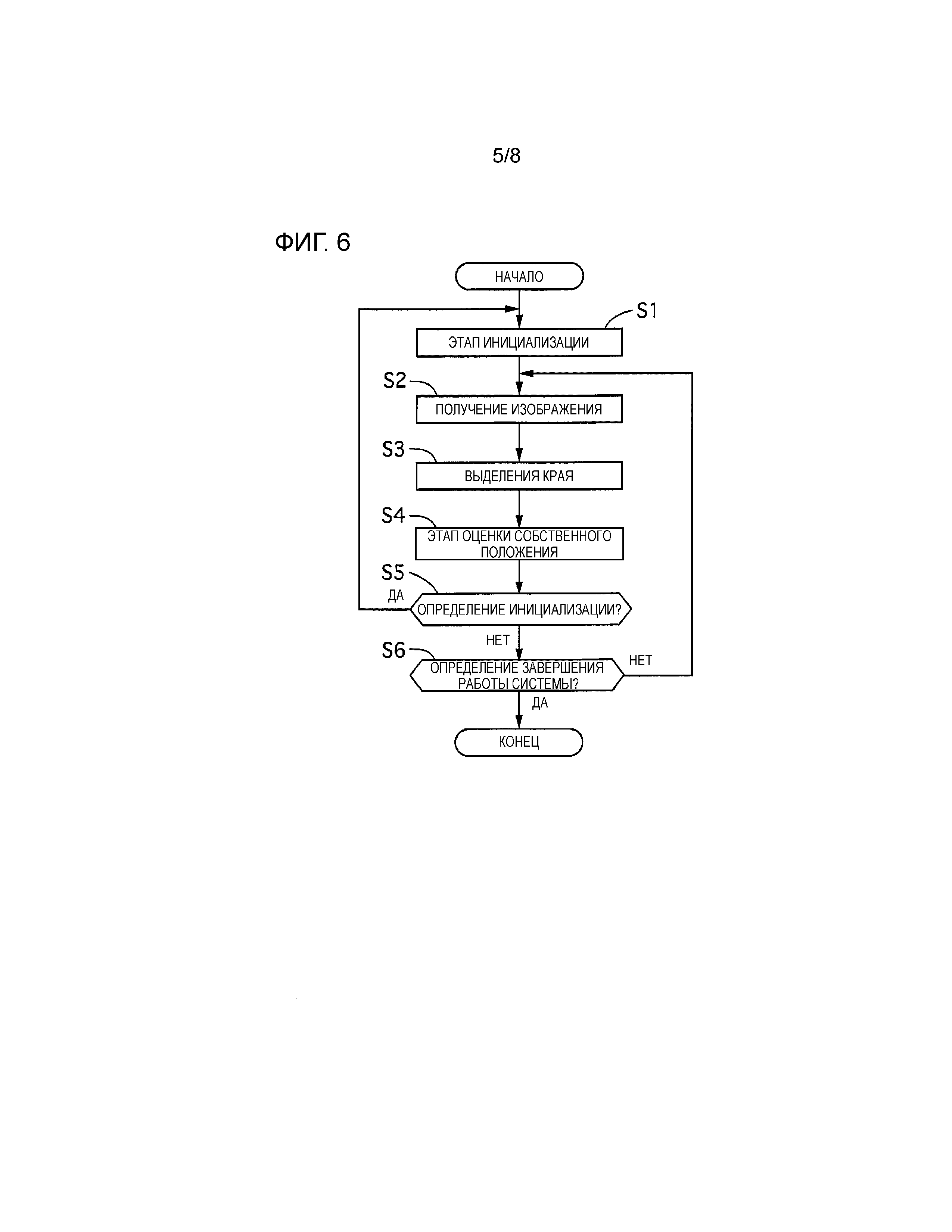
Фигура 6 представляет собой блок-схему, иллюстрирующую последовательность этапов компьютера 3 первого варианта выполнения.
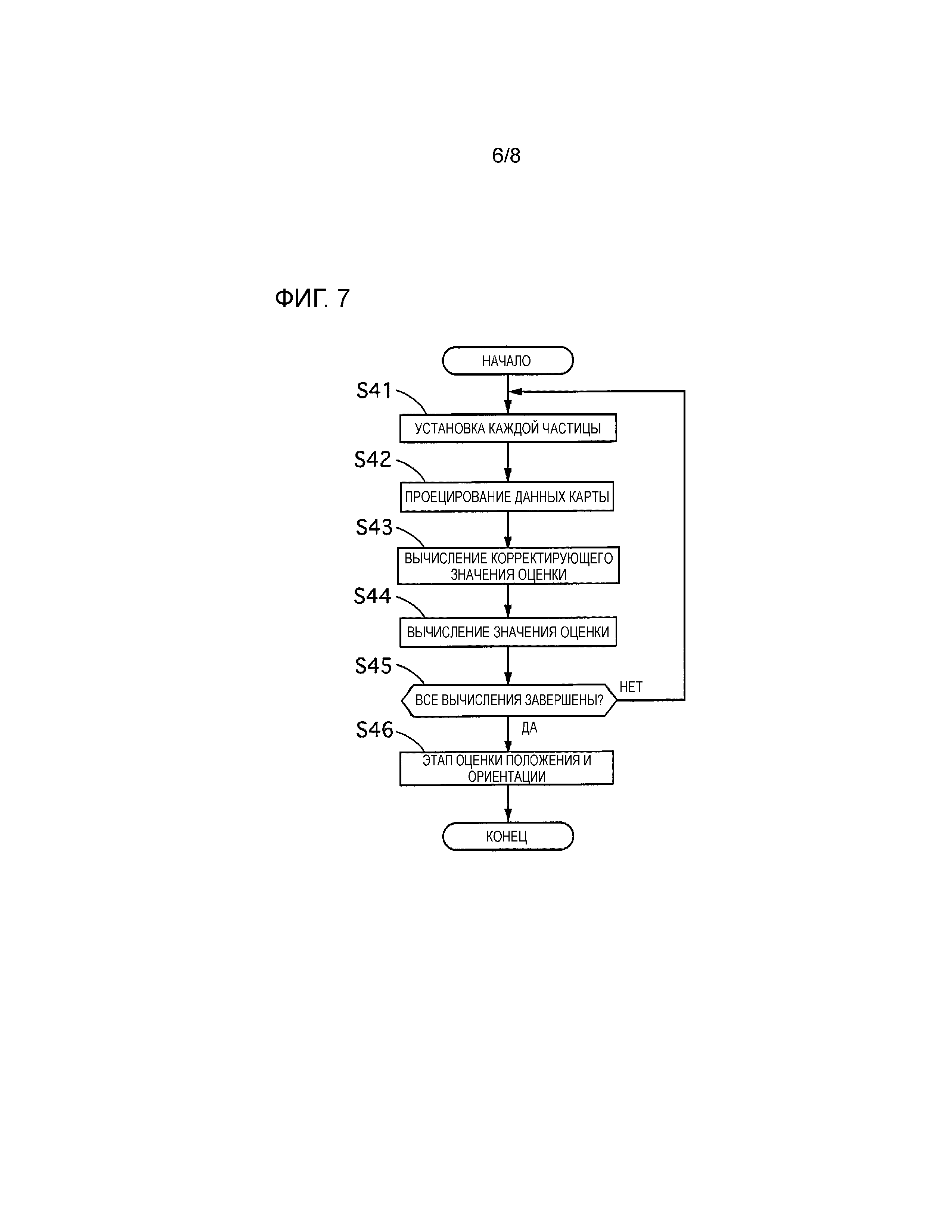
Фигура 7 представляет собой блок-схему, иллюстрирующую последовательность этапов оценки собственного положения первого варианта выполнения.
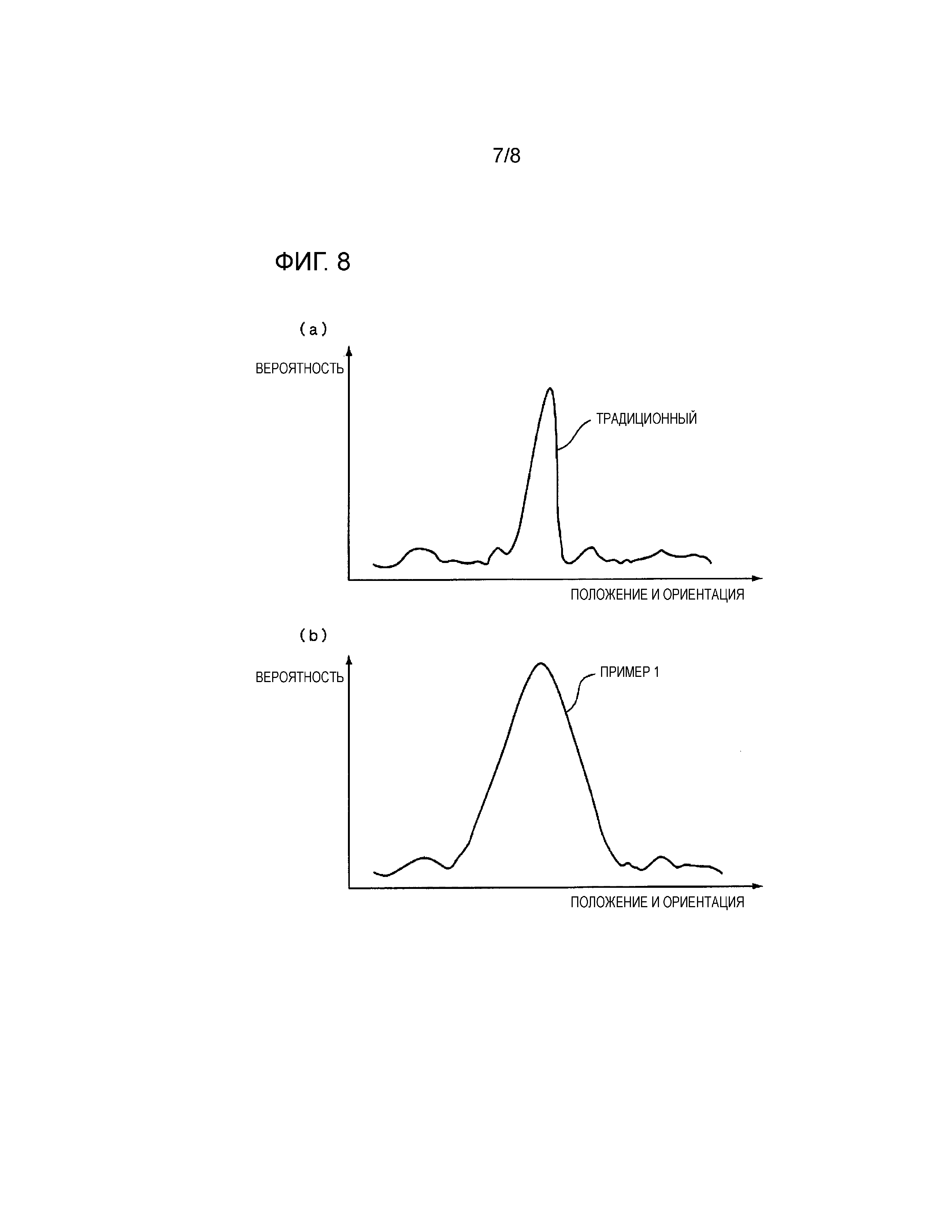
Фигура 8 представляет собой схему, иллюстрирующую эффект оценки собственного положения первого варианта выполнения.
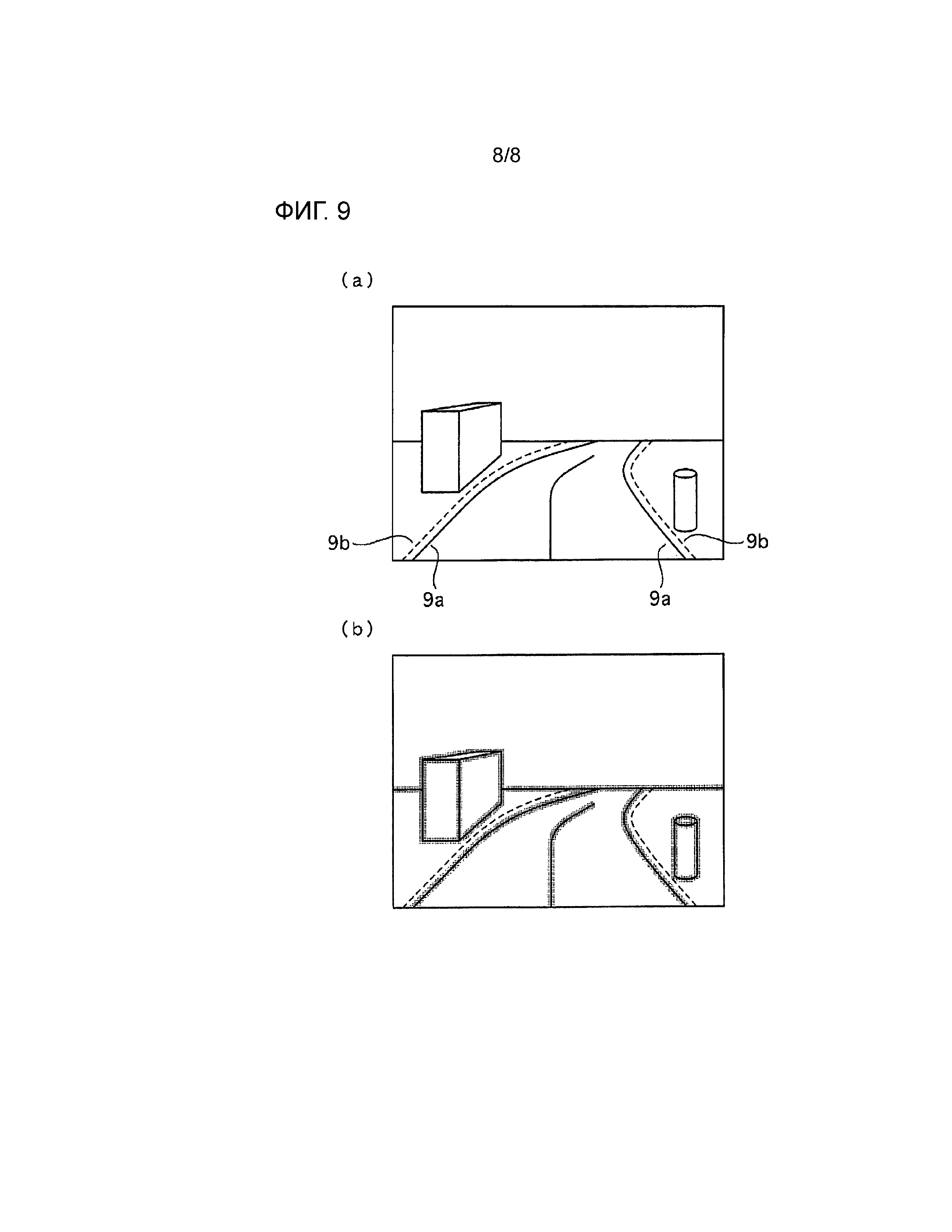
Фигура 9 представляет собой пояснительная вид, иллюстрирующий способ вычисления корректирующего значения оценки, соответствующего плотности края второго вариант выполнения.
[0008] 1 Транспортное средство
2 Камера (средство захвата изображения)
3 Компьютер
4 Блок хранения (средство хранения)
11 Блок выделения признаков (средство генерации изображения края)
12 Блок обработки инициализации
13 Блок генерации потенциального положения и ориентации
14 Блок генерации виртуального изображения (средство генерации виртуального изображения)
15 Блок вычисления значения оценки (средство вычисления значения оценки)
15а Блок вычисления корректирующего значения оценки
16 Блок оценки положения и ориентации (средство оценки положения и ориентации)
17 Блок определения инициализации
Варианты выполнения изобретения
[0009] [Первый вариант выполнения]
Фигура 1 представляет собой блок-схему устройства оценки положения движущегося тела первого варианта выполнения.
Транспортное средство 1 содержит камеру 2 (средство захвата изображения), компьютер 3 и блок 4 хранения (средство хранения).
Камера 2 закреплена на переднем концевом участке транспортного средства 1 на высоте h под углом θ градусов вниз от горизонтали и захватывает изображения области на передней стороне транспортного средства 1.
Компьютер 3 выполняет этап сопоставления между данными карты, хранящимися в блоке 4 хранения, и изображениями, захватываемыми камерой 2, и оценивает положение и ориентацию транспортного средства 1.
Блок 4 хранения хранит данные трехмерной карты, содержащие информацию о крае и информацию о положении конструкций, существующих в окружающей среде транспортного средства 1.
[0010] Фигура 2 представляет собой блок-схему управления оценкой собственного положения в компьютере 3 первого варианта выполнения.
Объектив камеры 2 представляет собой обычный объектив без дисторсии, но, например, может быть объективом типа рыбий глаз для захвата широкого диапазона. В последнем случае, собственное положение транспортного средства может быть оценено с помощью той же структуры путем установки модели камеры, используемой в блоке 14 генерации виртуального изображения, описанном ниже для камеры типа рыбий глаз. Дополнительно, если установлен объектив типа рыбий глаз, для того чтобы захватывать более широкий диапазон вокруг транспортного средства, несколько камер может быть установлено на автомобиле.
[0011] Блок 11 выделения признаков (средство генерации изображения края) выделяет края из изображения, захватываемого камерой 2, и генерирует изображение края. Известный способ обнаружения края, такой как способ Кэнни, может быть использован для выделения края. Разумеется, в зависимости от проблемы, достаточной является способность обнаруживать край с помощью способа, такого как фильтр Собеля, и, вкратце, достаточной является способность наблюдать край в изображении, которое является достаточно точным, для сопоставления параметра некоторого заданного положения и ориентации из данных карты и виртуального изображения, генерируемого из модели камеры 2.
[0012] Блок 12 обработки инициализации выполняет этап инициализации фильтра частиц, используемого для оценки положения и ориентации транспортного средства. В первом варианте выполнения выполняется инициализация параметров (положения и ориентации) частиц в пределах ожидаемого диапазона положения и ориентации транспортного средства. Здесь, так как проблема заключается в оценке положения и ориентации транспортного средства в пределах ограниченного участка, общее количество степеней свободы должно быть шесть, которые являются тремя степенями свободы (x, y, z), представляющими положение транспортного средства, и тремя степенями свободы (рыскание, тангаж, крен), представляющими ориентацию транспортного средства (см. Фигуру 3). В случае первого варианта выполнения, в котором собственное положение оценивается с использованием данных карты, приблизительный диапазон положений может быть установлен с использованием GPS, для того чтобы устанавливать диапазон для инициализации. Дополнительно, в это время должно быть установлено количество частиц, которое может быть установлено на соответствующее количество в соответствии с проблемой. Так как фильтр частиц представляет собой известный способ, детали опущены.
[0013] Блок 13 генерации потенциального положения и ориентации устанавливает параметр частиц текущего момента из параметра положения и ориентации частиц одного предшествующего момента, используя модель системы транспортного средства, установленную заранее (сразу после выхода из блока обработки инициализации параметр текущего момента устанавливается из инициализированного значения). Вышеуказанная структура находится в категории фильтров частиц, поэтому детали опущены, но в первом варианте выполнения модель системы должна быть случайным блужданием (Перемещение транспортного средства предполагается случайным образом в пределах заданного диапазона.). Разумеется, в соответствии с проблемой модель системы может быть моделью линейного движения с постоянной скоростью или т.п. Например, как проиллюстрировано на Фигуре 3, частица P и окружающие частицы P1-P5 положения и угла ориентации транспортного средства V(t1), оцененные в одном предшествующем цикле, перемещаются на величину показаний одометра, и существующий диапазон распределения частиц устанавливается и исправляется. Далее частицы P10-P15 устанавливаются для оценки нового положения и угла ориентации транспортного средства V(t2).
[0014] Блок 14 генерации виртуального изображения (средство генерации виртуального изображения) ссылается на блок 4 хранения и генерирует виртуальное изображение с использованием параметров положения и ориентации, установленных для некоторых частиц в ранее описанном блоке 13 генерации потенциального положения и ориентации, и модели камеры собственно камеры 2. В общем, если параметры положения и ориентации транспортного средства заданы, модель камеры собственно камеры 2 известна (достаточно измерения заранее; альтернативно, достаточно расчетного значения), и трехмерные данные блока 4 хранения известны, данные трехмерной карты могут быть преобразованы в двухмерное изображение (называемое виртуальным изображением).
[0015] В первом варианте выполнения выполняется сопоставление между краем виртуального изображения, генерируемого блоком 14 генерации виртуального изображения в блоке 15 вычисления значения оценки, который будет описан ниже, и краем в выделяемом изображении, выделяемом блоком 11 выделения признаков из изображения, захватываемого камерой 2. В связи с этим в блоке 14 генерации виртуального изображения проецирование только информации о крае из трехмерной карты, соответствующей компоненту, который выделяется в качестве края из захваченного изображения блоком 11 выделения признаков, является достаточным. Конкретно, проецирование только краевого участка зданий на карте белых полос на поверхности дороги и т.п. является достаточным, и проецирование информации, такой как текстура или цвет зданий и поверхности дороги, не требуется.
Как было описано выше, количество частиц может быть установлено в соответствии с проблемой в ранее описанном блоке 13 генерации потенциального положения и ориентации, но если 100 частиц должны быть сгенерированы, этапы будут повторяться 100 раз.
[0016] Блок 15 вычисления значения оценки (средство вычисления значения оценки) выполняет сопоставление между изображением края, выведенным из блока 11 выделения признаков, и компонентом края виртуального изображения, выведенного из блока 14 генерации виртуального изображения, для оценки степени перекрытия между ними, причем более высокое значение оценки (вероятность) е вычисляется, когда степень перекрытия увеличивается. В традиционном способе вычисления значения оценки если два изображения просканированы, и оба пикселя, представляющие интерес, (xi, yi) имеют край, значение оценки добавляется (Eval(xi, yi)=1), а если нет, значение не добавляется (Eval(xi, yi)=0), таким образом, при такой установке это значение оценки увеличивается, когда перекрытие увеличивается, в то время как в первом варианте выполнения цель заключается в повышении точности и стабилизации способа оценки положения и ориентации, который использует фильтр частиц, и когда значение оценки вычислено, даже если края не перекрываются, если расстояние между ближайшими краями (расстояние от края до края) является близким (меньше или равно заданному расстоянию), корректирующее значение оценки, соответствующее близости двух краев, добавляется. Вычисление корректирующего значения оценки выполняется блоком 15а вычисления корректирующего значения оценки в блоке 15 вычисления значения оценки.
[0017] Корректирующее значение оценки может быть установлено в соответствии с количеством пикселей (количеством пикселей) между краем в виртуальном изображении и краем в изображении края. Например, относительно края в виртуальном изображении корректирующее значение оценки ep(xi, yi), соответствующее количеству пикселей пикселя (xi, yi) в изображении края, который смещен на один или два пикселя, устанавливается на 0,5, корректирующее значение оценки ep(xi, yi), соответствующее количеству пикселей пикселя (xi, yi), который смещен на три или четыре пикселя, устанавливается на 0,25, и корректирующее значение оценки ep(xi, yi), соответствующее количеству пикселей пикселя (xi, yi), который смещен на пять или более пикселей, устанавливается на 0,0. А именно, в виртуальном изображении, таком как на Фигуре 4(а), обеспечивая область окрестности края из четырех пикселей по обеим сторонам края, как проиллюстрировано на Фигуре 4(b), ширина края в виртуальном изображении практически утолщается, и когда край в изображении края перекрывает область окрестности края, задается корректирующее значение оценки ep(xi, yi), соответствующее расстоянию от края до края.
[0018] В качестве другого примера, корректирующее значение оценки может быть вычислено с использованием трехмерного расстояния в реальном пространстве, а не просто количества пикселей. Когда заданное расстояние определяется на основе количества пикселей, как описано выше, расстояние в реальном пространстве, соответствующее одному пикселю, изменяется в соответствии с расстоянием глубины от транспортного средства, а именно, так как вертикальное и горизонтальное разрешения на пиксель отличаются между трехмерным объектом, размещенным спереди, и трехмерным объектом, размещенным сзади. Например, в виртуальном изображении, проиллюстрированном на Фигуре 5(а), трехмерный объект, обведенный пунктирной линией, имеет одинаковый размер на передней поверхности и на задней поверхности в реальном пространстве, но его размер, проецируемый на виртуальном изображении, изменяется в соответствии с глубиной. В связи с этим при отображении реального пространства таким же образом, как способ в блоке 14 генерации виртуального изображения, с использованием данных карты, чья трехмерная информация известна, как проиллюстрировано на Фигуре 5(b), обеспечивается область окрестности края, принимая во внимание реальное расстояние, и получается корректирующее значение оценки ed(xi, yi), соответствующее реальному расстоянию.
Корректирующее значение оценки ed(xi, yi), соответствующее реальному расстоянию, получается из следующей формулы.

Здесь alpha представляет собой параметр регулировки, и d(xi, yi) представляет собой кратчайшее расстояние от края, когда координата (xi, yi) проецируется трехмерным образом. Когда вышеуказанное расстояние равно или больше заданного значения (край далеко), ed(xi, yi) может быть установлено на ноль.
В блоке 15а вычисления корректирующего значения оценки вышеуказанные этапы повторяются столько раз, сколько частиц установлено в блоке 13 генерации потенциального положения и ориентации.
[0019] Блок 15 вычисления значения оценки вычисляет значение оценки для каждого пикселя на основе следующей формулы.
(i) Когда устанавливается корректирующее значение оценки ep(xi, yi), соответствующее количеству пикселей,

Eval(xi, yi)=1 (края перекрываются),
Eval(xi, yi)=0 (края не перекрываются (в противном случае))
(ii) Когда устанавливается корректирующее значение оценки ed(xi, yi), соответствующее реальному расстоянию,

Eval(xi, yi)=1 (края перекрываются),
Eval(xi, yi)=0 (края не перекрываются (в противном случае))
[0020] Соответственно, когда задается корректирующее значение оценки ep(xi, yi), соответствующее количеству пикселей, для участков, где количество пикселей между краем в виртуальном изображении и краем в изображении края достигает двух пикселей, одна половина исходных точек добавляется, и для участков, достигающих четырех пикселей, одна четверть исходных точек добавляется. С другой стороны, когда задается корректирующее значение оценки ed(xi, yi), соответствующее реальному расстоянию, если обратная величина расстояния добавляется во время добавления, будет добавлено более высокое значение, так как расстояние между краем в виртуальном изображении и краем в изображении края уменьшается.
Также в блоке 15 вычисления значения оценки таким же образом этапы должны повторяться столько раз, сколько частиц установлено в блоке 13 генерации потенциального положения и ориентации.
В приведенном выше примере корректирующее значение оценки вычисляется в соответствии с количеством пикселей или реальным расстоянием между краем в виртуальном изображении и краем в изображении края с краем в виртуальном изображении в качестве опорной точки, но такие же результаты будут получены, даже если корректирующее значение оценки вычисляется в соответствии с количеством пикселей или реального расстояния между краем в изображении края и краем в виртуальном изображении с краем в изображении края в качестве опорной точки.
[0021] Блок 16 оценки положения и ориентации (средство оценки положения) оценивает положение и ориентацию транспортного средства на основе значения оценки для каждой частицы, установленной в блоке 15 вычисления значения оценки. Сам этап представляет собой структуру фильтра частиц, но большая взвешенная величина устанавливается, когда увеличивается значение оценки. Например, потенциальное прогнозируемое положение и угол ориентации с наибольшей вероятностью вычисляются как фактическое положение и ориентация транспортного средства. Дополнительно, вероятность каждого потенциального прогнозируемого положения и угла ориентации используется для получения взвешенного среднего прогнозируемых положений и углов ориентации, и полученное значение может быть установлено в качестве конечного положения и угла ориентации транспортного средства.
В блоке 16 оценки положения и ориентации положение и ориентация оцениваются в структуре фильтра частиц, и вычисляется значение оценки при оцененных параметрах (положении и ориентации) (В качестве этапа, блок 13 генерации потенциального положения и ориентации и блок 15 вычисления значения оценки 15 выполняются. На уже описанных этапах вышеуказанная последовательность должна быть выполнена количество раз, соответствующее количеству частиц, но здесь будет выполнена только последовательность для одного параметра результата оценки). Вышеуказанное значение оценки выводится на блок 17 определения инициализации на последующем этапе, и используется для этапа инициализации, когда оценка является неправильной.
[0022] Блок 17 определения инициализации определяет, являются или нет оцененное положение и ориентация ошибочными обнаружениями. Если выполняется определение ошибочного обнаружения, порядок инициализации отправляется на блок 12 обработки инициализации, и этапы выполняются снова. В качестве способа определения, когда значение оценки на основе результата оценки, выведенного из блока 16 оценки положения и ориентации, ниже порогового значения, установленного заранее, выполняется определение ошибочного обнаружения.
[0023] [Все этапы]
Фигура 6 представляет собой блок-схему, иллюстрирующую последовательность всех этапов компьютера 3 первого варианта выполнения.
На этапе S1 этап инициализации фильтра частиц выполняется в блоке 12 обработки инициализации. Вышеуказанный этап достаточно выполнять однажды во время активации системы. Однако на этапе S5, если определяется необходимость реинициализации в блоке 17 определения инициализации, частицы инициализируются снова.
На этапе S2 изображение впереди транспортного средства захватывается камерой 2.
На этапе S3 края выделяются из изображения, получаемого с помощью камеры 2, в блоке 11 выделения признаков.
[0024] На этапе S4 выполняется этап оценки собственного положения. Детали будут описаны ниже.
На этапе S5 определяется, является или нет оцененное положение и ориентация ошибочным обнаружением, так, что инициализация требуется снова в блоке 17 определения инициализации. Если ДА, этапы переходят к этапу S1, а если НЕТ, этапы переходят к этапу S6.
На этапе S6 определяется, было или нет введено вручную пользователем выключение системы; если ДА, этапы заканчиваются, а если НЕТ, этапы переходят к этапу S2.
[0025] [Этапы оценки собственного положения]
Фигура 7 представляет собой блок-схему, иллюстрирующую последовательность этапов оценки собственного положения первого варианта выполнения.
На этапе S41 в блоке 13 генерации потенциального положения и ориентации параметр частиц текущего момента (шесть степеней свободы положения и ориентации) устанавливается из параметра положения и ориентации частиц одного предшествующего момента с использованием модели системы транспортного средства, установленной заранее.
На этапе S42 в блоке 14 генерации виртуального изображения виртуальное изображение генерируется на основе параметров положения и ориентации, установленных для частицы.
На этапе S43 в блоке 15а вычисления корректирующего значения оценки блока 15 вычисления значения оценки 15 вычисляется корректирующее значение оценки (ep или ed), соответствующее величине смещения (количеству пикселей или реальному расстоянию) между краем в изображении края и краем в виртуальном изображении.
[0026] На этапе S44 в блоке 15 вычисления значения оценки оценивается степень перекрытия между изображением края и виртуальным изображением. В это время вычисляется значение оценки, принимая во внимание корректирующее значение оценки (ep или ed).
На этапе S45 в блоке 15 вычисления значения оценки определяется, завершено или нет вычисление значения оценки для всех частиц, сгенерированных в блоке 12 обработки инициализации; если ДА, этапы переходят к этапу S46, а если НЕТ, процесс переходит к этапу S41.
На этапе S46 в блоке 16 оценки положения и ориентации вычисляется взвешенная величина для значения оценки каждой частицы, и оценивается положение и ориентация в текущий момент.
[0027] Далее будут описаны эффекты изобретения.
В традиционном устройстве оценки положения движущегося тела, даже если параметр частицы близок к истинному положению основного транспортного средства, если параметр положения даже незначительно смещен от истинного положения и ориентации, существует проблема, что вероятность частицы сильно снижается, в результате чего оценка положения и ориентации основного транспортного средства становится нестабильной, как проиллюстрировано на Фигуре 8(а).
[0028] Для сравнения, в первом варианте выполнения вероятность (значение оценки) увеличивается, когда увеличивается количество пикселей, для которых расстояние от края до края, которое представляет собой расстояние между краем в изображении края и краем в виртуальном изображении, меньше или равно заданному значению. Соответственно, как проиллюстрировано на Фигуре 8(b), крайнее уменьшение вероятности может быть подавлено для частицы с небольшой величиной смещения параметров положения и ориентации относительно истинного положения и ориентации основного транспортного средства. Другими словами, даже если возникает небольшое смещение между параметрами положения и ориентации частиц и истинным положением и ориентацией основного транспортного средства, вероятность задана, и в связи с этим положение и ориентация, близкие к истинному положению и ориентации основного транспортного средства, могут быть оценены. В связи с этим положение и ориентация основного транспортного средства могут быть надежно оценены.
[0029] В первом варианте выполнения, когда расстояние от края до края меньше или равно заданному расстоянию, вероятность увеличивается, по мере того как расстояние от края до края уменьшается. Соответственно, так как вероятность частиц с меньшей величиной смещения параметров положения и ориентации относительно истинного положения и ориентацию основного транспортного средства увеличивается, область, близкая к истинному положению и ориентации в распределении вероятности пространства параметров, может быть уплотнена. В связи с этим более подходящая вероятность может быть получена, и точность и стабильность оценки положения и ориентации могут быть улучшены.
[0030] В первом варианте выполнения заданное расстояние представляет собой заданное количество пикселей. Соответственно, диапазон для увеличения значения оценки может быть установлен на количество пикселей, которое разработчик устанавливает заранее. В связи с этим диапазон количества пикселей от края, в котором вероятность частицы оценивается выше, может быть установлен в соответствии с проблемой.
[0031] В первом варианте выполнения заданное расстояние представляет собой трехмерное расстояние в реальном пространстве. Соответственно, диапазон для увеличения значения оценки он может быть установлен на расстояние в реальном пространстве, которое разработчик устанавливает заранее. В связи с этим диапазон расстояния в реальном пространстве от края, в котором вероятность частицы оценивается выше, может быть установлен в соответствии с проблемой.
[0032] Первый вариант выполнения оказывает эффекты, перечисленные ниже.
(1) Устройство содержит: камеру 2, которая захватывает изображение впереди основного транспортного средства для получения захваченного изображения, блок 11 выделения признаков, который выделяет край из захваченного изображения для генерации изображения края, блок 4 хранения для хранения данных карты, содержащих информацию о крае и информацию о положении конструкций, существующих в окружающей среде основного транспортного средства, блок 14 генерации виртуального изображения, который устанавливает множество частиц, которые являются предполагаемыми положениями и ориентациями основного транспортного средства, и преобразует информацию о крае из данных карты для каждой частицы в виртуальное изображение, захватываемое из предполагаемого положения и ориентации, блок 15 вычисления значения оценки, который сравнивает изображение края и виртуальное изображение для каждой частицы, и присваивает более высокое значение оценки, если имеется большее количество перекрывающихся краев между изображениями и присваивает более высокое значение оценки, если имеется большее количество краев, которые не являются перекрывающимися краями и для которых расстояние от края до края, которое представляет собой расстояние между краем в изображении края и краем в виртуальном изображении, меньше или равно заданному значению, и блок 16 оценки положения и ориентации, который оценивает положение основного транспортного средства на основе значения оценки для каждой частицы.
В связи с этим положение и ориентация основного транспортного средства могут быть надежно оценены.
[0033] (2) Блок 15 вычисления значения оценки, когда расстояние от края до края меньше или равно заданному расстоянию, увеличивает значение оценки, по мере того как расстояние от края до края уменьшается.
В связи с этим более подходящая вероятность может быть получена, и точность и стабильность оценки положения и ориентации основного транспортного средства может быть улучшена.
[0034] (3) Заданное расстояние представляет собой заданное количество пикселей. В связи с этим диапазон количества пикселей от края, в котором вероятность частицы оценивается выше, может быть установлен в соответствии с проблемой.
[0035] (4) Заданное расстояние представляет собой трехмерное расстояние в реальном пространстве.
В связи с этим диапазон расстояния в реальном пространстве от края, в котором вероятность частицы оценивается выше, может быть установлен в соответствии с проблемой.
[0036] (5) Устройство захватывает изображение впереди основного транспортного средства для получения захваченного изображения, выделяет край из захваченного изображения для генерации изображения края, устанавливает множество частиц, которые являются предполагаемыми положениями и ориентациями основного транспортного средства, преобразует информацию о крае из данных карты, содержащих информацию о крае и информацию о положении конструкций, существующих в окружающей среде основного транспортного средства, для каждой частицы в виртуальное изображение, захватываемое из предполагаемого положения и ориентации, сравнивает изображение края и виртуальное изображение для каждой частицы, присваивает более высокое значение оценки, если имеется большее количество перекрывающихся краев между изображениями, и присваивает более высокое значение оценки, если имеется большее количество краев, которые не являются перекрывающимися краями и для которых расстояние от края до края, которое представляет собой расстояние между краем в изображении края и краем в виртуальном изображении, меньше или равно заданному значению, и оценивает положение основного транспортного средства на основе значения оценки для каждой частицы.
В связи с этим положение и ориентация основного транспортного средства могут быть надежно оценены.
[0037] [Второй вариант выполнения]
Далее устройство оценки положения движущегося тела согласно второму варианту выполнения будет описано со ссылкой на чертежи.
Фигура 9 представляет собой пояснительная вид, иллюстрирующий способ вычисления корректирующего значения оценки, соответствующего плотности края.
При этом другие конфигурации являются такими же, как в первом варианте выполнения, таким образом, заданы те же коды, и их описания опущены.
[0038] Фигура 9(а) представляет собой изображение края, сгенерированное путем выделения края из изображения, захваченного камерой 2, в блоке 11 выделения признаков (средстве генерации изображения края). В изображении края, показанном на Фигуре 9(а), так как обочина 9b существует в окрестности параллельно полосе 9а, из-за положения и ориентации частицы край полосы в виртуальном изображении и край обочины 9b в изображении края приходят в близкое состояние (состояние, в котором плотность края является высокой), и значение оценки частично увеличивается.
Таким образом, во втором варианте выполнения, когда расстояние между ближайшими краями (расстояние от края до края) является близким (меньше или равно заданному расстоянию), в области, где плотность края изображения края является высокой, заданное расстояние для определения уменьшается.
[0039] Например, в области, где плотность края изображения края является низкой, как в первом варианте выполнения, относительно краев в виртуальном изображении корректирующее значение оценки ep(xi, yi), соответствующее количеству пикселей пикселя (xi, yi) в изображении края, который смещен на один или два пикселя, устанавливается на 0,5, корректирующее значение оценки ep(xi, yi), соответствующее количеству пикселей пикселя (xi, yi), который смещен на три или четыре пикселя, устанавливается на 0,25, и корректирующее значение оценки ep(xi, yi), соответствующее количеству пикселей пикселя (xi, yi), который смещен на пять или более пикселей, устанавливается на 0,0.
С другой стороны, в области, где плотность края изображения края является высокой, относительно края в виртуальном изображении корректирующее значение оценки ep(xi, yi), соответствующее количеству пикселей пикселя (xi, yi) в изображении края, который смещен на один пиксель, устанавливается на 0,5, корректирующее значение оценки ep(xi, yi), соответствующее количеству пикселей пикселя (xi, yi), который смещен на два пикселя, устанавливается на 0,25, и корректирующее значение оценки ep(xi, yi), соответствующее количеству пикселей пикселя (xi, yi), который смещен на 3 или более пикселей, устанавливается на 0,0.
А именно, в изображении края, таком как на Фигуре 9(а), путем обеспечения области окрестности края из двух пикселей на обеих сторонах края полосы 9а, которая представляет собой область, где плотность края изображения края является высокой, как проиллюстрировано на Фигуре 9(b), область окрестности края может быть сужена по сравнению с другими областями, и увеличение корректирующего значения оценки из-за края обочина 9b может быть подавлено.
[0040] Второй вариант выполнения оказывает следующие эффекты в дополнение к эффектам 1-5 первого варианта выполнения.
(6) Блок вычисления значения оценки уменьшает заданное расстояние, когда плотность края изображения края увеличивается.
В связи с этим ошибочное увеличение корректирующего значения оценки в областях, где плотность края является высокой, может быть подавлена, и точность и стабильность оценки положения и ориентации основного транспортного средства может быть улучшена.
[0041] (Другие варианты выполнения)
Предпочтительный вариант выполнения настоящего изобретения был описан выше на основе одного варианта выполнения, но определенные конфигурации настоящего изобретения не ограничены этим вариантом выполнения, и изменения конструкции, выполняемые без отклонения от объема охраны изобретения, также включены в настоящее изобретение.
Например, в варианте выполнения функция оценки устанавливается (задача максимизации) так, что значение оценки увеличивается, когда количество перекрывающихся краев между изображением края и краем в виртуальном изображении увеличивается, но функция оценки может быть установлена так, что ошибка уменьшается, когда количество перекрывающихся краев увеличивается (задача минимизации).
[0042] Настоящее изобретение является применимым к оценке относительного положения (бокового положения) транспортного средства относительно левой и правой белых линий пути движения. В этом случае параметрами положения и ориентации являются одна степень свободы бокового положения в качестве параметра положения, и две степени свободы тангажа и рыскания в качестве параметра ориентации; всего три степени свободы. При этом, так как ширина белых линий изменяется от места к месту, ширина белых линий может быть добавлена в качестве параметра оценки.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

