Результат интеллектуальной деятельности: УСТРОЙСТВО ОПЕРИРОВАНИЯ, СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ В НЕМ И УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящая технология относится к устройству оперирования, дистанционно управляющему устройством обработки информации, таким как телевизионный приемник, к способу обработки информации указанного устройства и к устройству обработки информации, которое представляет собой цель управления устройством оперирования.
Уровень техники
В качестве беспроводного оконечного устройства для выполнения оперирования, с помощью которого дистанционно управляют устройством обработки информации, таким как телевизионный приемник, в основном, до настоящего времени применяли инфракрасный пульт дистанционного управления, в котором используется инфракрасная передача данных. Однако инфракрасный пульт дистанционного управления обладает высокой степенью направленности инфракрасных лучей, и, следовательно, требовалось направлять пульт дистанционного управления, модуль излучения света инфракрасных лучей, на устройство - цель управления. Однако, направленность радиоволны относительно низка и, следовательно, в последние годы, был разработан радиочастотный (RF) пульт дистанционного управления, в котором используется высокочастотная радиоволна, и который завоевывает все большую популярность. Кроме того, в настоящее время соответствующими организациями производятся попытки стандартизировать RF пульт дистанционного управления.
Например, в соответствии со стандартом IEEE (зарегистрированный товарный знак) (Институт инженеров по электротехнике и радиоэлектронике) 802.15.4 для коммуникаций в ближнем поле был стандартизирован ZigBee (зарегистрированный товарный знак), как спецификация для сетевого уровня, уровня безопасности и уровня приложения, которые соответствуют верхнему уровню IEEE (зарегистрированный товарный знак) 802.15.4. Кроме того, на основе IEEE (зарегистрированный товарный знак) 802.15.4 торговые организации выполняют стандартизацию стандарта для RF пульта дистанционного управления ZigBee (зарегистрированный товарный знак) RF4CE (Радиочастоты для бытовой электроники).
Например, в Патентном документе 1 раскрыта технология, относящаяся к оконечному устройству оперирования, которое управляет устройством обработки информации, таким, как телевизионный приемник, используя RF беспроводный сигнал, такой как RF4CE. Кроме того, в Патентном документе 2 описано устройство пульта дистанционного управления, включающее в себя кожух, сформированный в виде шестистороннего прямоугольного параллелепипеда, который имеет две основные поверхности, на которых предусмотрены кнопки оперирования. Такое устройство пульта дистанционного управления обнаруживает, какая из двух основных поверхностей представляет собой переднюю поверхность, и отключает ключи оперирования основной поверхности на задней стороне.
Патентный документ 1: выложенная заявка на патент Японии №2011-034294
Патентный документ 2: выложенная заявка на патент Японии №HEI 6-89634
Раскрытие изобретения
Задача, решаемая изобретением
Также в последние годы устройства обработки информации становятся все более многофункциональными. Например, существует телевизионный приемник и т.п., который соединен с Интернет и позволяет использовать различные услуги в Интернет. Поэтому, также в устройстве оперирования, для дистанционного управления таким многофункциональным устройством обработки информации, все более усиливается необходимость использования устройства - указателя, такого как сенсорная панель и клавиатура. Однако требуется пространство для установки устройства - указателя и для размещения клавиатуры требуется определенный размер поверхности, что приводит к увеличению размера устройства оперирования. Учитывая это, рассматривается возможность предоставления клавиатуры, сенсорной панели и т.п. на двух поверхностях устройства оперирования, которые противоположны в направлениях вперед и назад. В случае, когда используется такая конфигурация, ожидаются различные улучшения для улучшения удобства и простоты использования.
Учитывая описанные выше обстоятельства, цель настоящей технологии состоит в том, чтобы обеспечить устройство оперирования, обеспечивающее возможность улучшения удобства и простоты использования, способ обработки информации для устройства оперирования и устройства обработки информации.
Решения задачи
Для решения упомянутых выше задач, устройство оперирования, представляющее аспект, в соответствии с настоящей технологией, включает в себя: кожух, включающий в себя две поверхности, противоположные в направлениях вперед и назад, в качестве первой поверхности и второй поверхности; первый модуль ввода оперирования, обеспечиваемый на первой поверхности, и включает в себя устройство обнаружения для обнаружения пользовательского оперирования в отношении заданной координаты пространства обнаружения на первой поверхности; второй модуль ввода оперирования, обеспечиваемый на второй поверхности; модуль определения для определения положения кожуха, при выполнении пользовательского оперирования относительно пространства обнаружения координаты устройством обнаружения со стороны второй поверхности; и преобразователь для преобразования, при определении положения, информации, обнаруживаемой устройством обнаружения, в информации системы координат для пространства обнаружения координаты, как можно видеть со стороны второй поверхности.
Устройство обнаружения может обнаруживать координаты, определенные пользователем в отношении пространства обнаружения координаты, и преобразователь может выполнять преобразование, выполняя вычисления по формулам
X'=α-Y,
Y'=β-X,
где координаты, обнаруживаемые устройством обнаружения, обозначены как (X, Y), координаты, обнаруживаемые в системе координат пространства обнаружения координат, если смотреть со стороны второй поверхности, обозначены как (X', Y'), длина пространства обнаружения координаты в направлении оси Y обозначена как α и длина пространства обнаружения координаты в направлении оси X обозначена как β.
В упомянутом выше устройстве оперирования первый модуль ввода оперирования может включать в себя одну или более кнопок оперирования, вместе с устройством обнаружения, и устройство оперирования может дополнительно включать в себя модуль управления для перевода обнаружения оперирования с модулем кнопок оперирования в состояние остановки при определении положения.
Модуль управления может устанавливать определение положения в состояние остановки при выводе информации устройством обнаружения. Модуль управления может устанавливать определение положения в состояние остановки при выполнении оперирования вторым модулем ввода оперирования.
Устройство оперирования, в соответствии с настоящей технологией, может дополнительно включать в себя модуль получения изображения для съемки изображения передней стороны любой одной из первой поверхности и второй поверхности, и модуль определения для определения положения на основе изображения, снятого модулем съемки изображения.
Преобразователь может выполнять преобразование, выполняя вычисления по формулам
X'=α-X,
Y'=Y,
где координаты обнаружения, полученные в системе координат устройства обнаружения координат, обозначены как (X, Y), координаты обнаружения в системе координат пространства обнаружения координат, которые можно видеть со стороны второй поверхности, обозначены как (X', Y'), длина пространства обнаружения устройства обнаружения координат в направлении оси Y обозначена как α.
Устройство обнаружения может обнаруживать информацию о движении в соответствии с операцией пользователя в отношении пространства обнаружения координаты, и преобразователь может выполнять преобразование, выполняя вычисления по формулам
x'=-y,
y'=-x,
где информация о движении, обнаруживаемая системой координат устройства обнаружения координат, обозначена как (x, y) и информация о движении в системе координат пространства обнаружения координат, если смотреть со стороны второй поверхности, обозначена, как (x', y').
Устройство обнаружения может обнаруживать информацию о движении, в соответствии с операцией пользователя, в отношении пространства обнаружения координаты, и преобразователь может выполнять преобразование, выполняя вычисления по формулам
x'=-x,
y'=y,
где информация о движении, полученная в системе координат устройства обнаружения координат, обозначена как (x, y) и информация о движении системы координат для пространства обнаружения координат, которую можно видеть со стороны второй поверхности, обозначена как (x', y').
Способ обработки информации для устройства оперирования, который составляет другой аспект, в соответствии с настоящей технологией, включает в себя этапы, на которых: определяют положение кожуха, включающего в себя первую поверхность, на которой предусмотрен первый модуль ввода оперирования, и вторую поверхность, на которой предусмотрен второй модуль ввода оперирования, при этом первый модуль ввода оперирования включает в себя устройство обнаружения для обнаружения пользовательского оперирования в отношении заданного пространства обнаружения координаты, при этом вторая поверхность распложена противоположно первой поверхности в направлениях вперед и назад, а положение кожуха представляет собой положение при выполнении оперирования пользователем в отношении пространства обнаружения координаты устройства обнаружения со стороны второй поверхности; и преобразуют, при изменении положения, информацию, обнаруживаемую устройством обнаружения в информацию системы координат для пространства обнаружения координат, которое можно видеть со стороны второй поверхности.
Устройство обработки информации, представляющее другой аспект, в соответствии с настоящей технологией, включает в себя: для устройства оперирования, включающего в себя кожух, содержащий две поверхности, противоположные в направлениях вперед и назад, в качестве первой поверхности и второй поверхности, первый модуль ввода оперирования, обеспечиваемый на первой поверхности и содержащий устройство обнаружения для обнаружения пользовательского оперирования в отношении заданного пространства обнаружения координаты на первой поверхности, и второй модуль ввода оперирования, обеспечиваемый на второй поверхности, модуль определения для определения положения кожуха, при выполнении пользовательского оперирования в отношении пространства обнаружения координаты устройства обнаружения со стороны второй поверхности; и преобразователь для преобразования, при определении высоты, информации, обнаруживаемой устройством обнаружения, в информацию системы координат пространства обнаружения координаты, видимого со стороны второй поверхности.
Эффект изобретения
Как описано выше, в соответствии с настоящей технологией, возможно, обеспечить устройство оперирования, обладающее большим удобством и простотой использования.
Краткое описание чертежей
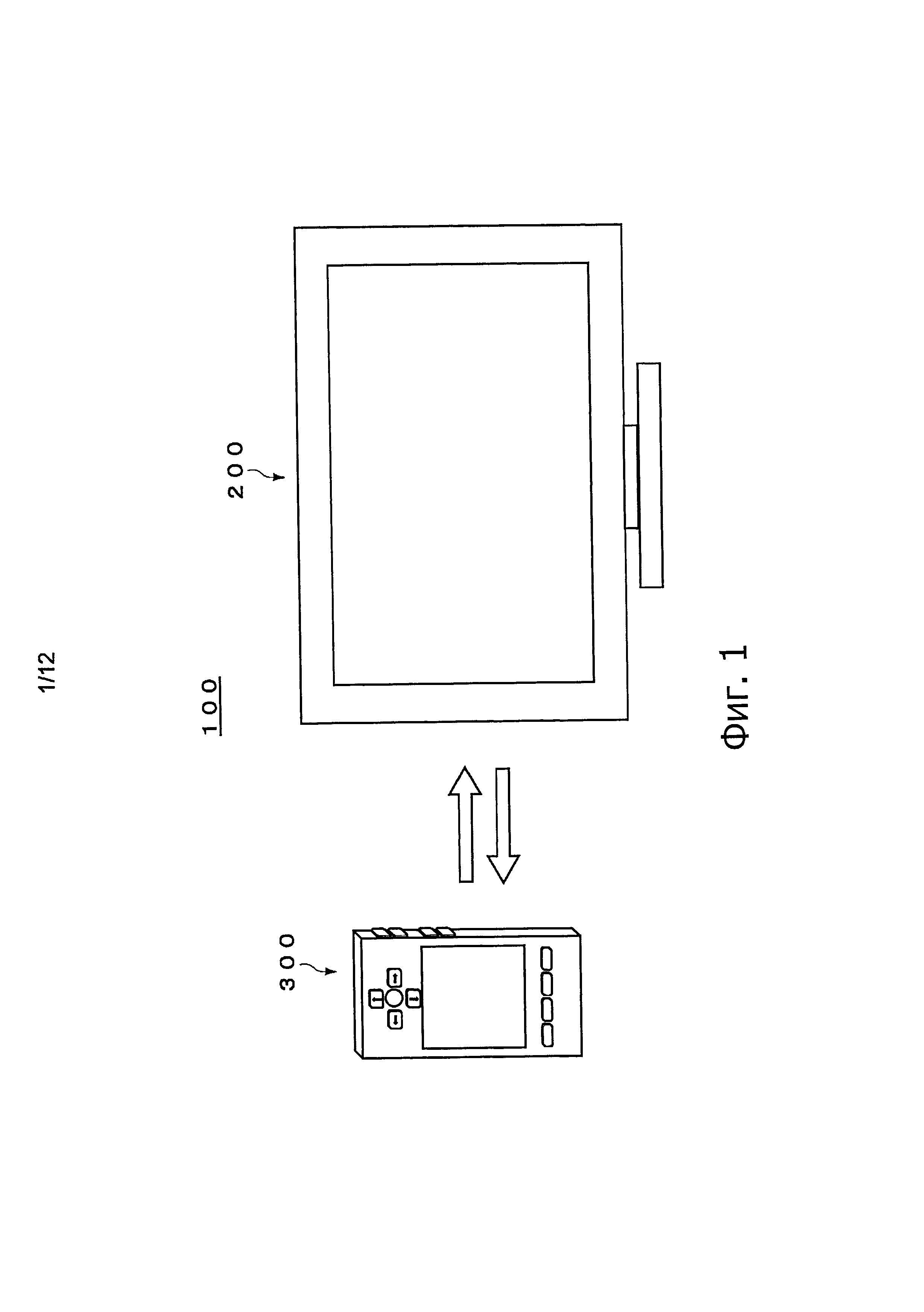
Фиг.1 - блок-схема, представляющая конфигурацию системы обработки информации первого варианта осуществления в соответствии с существующей технологией.
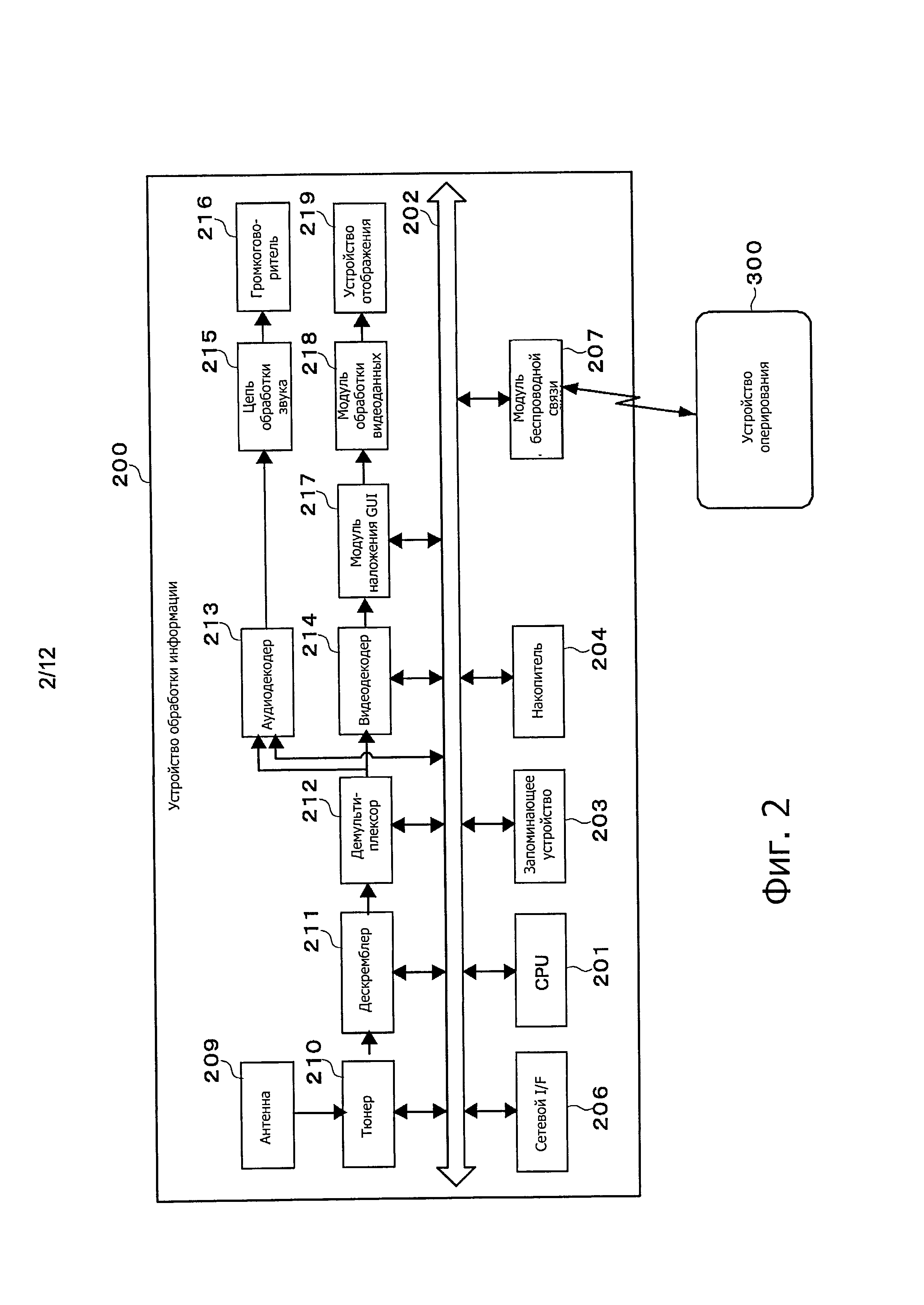
Фиг.2 - вид, представляющий конфигурацию аппаратных средств устройства обработки информации по фиг.1.
Фиг.3 - внешний вид со стороны поверхности пульта дистанционного управления устройства оперирования по фиг.1.
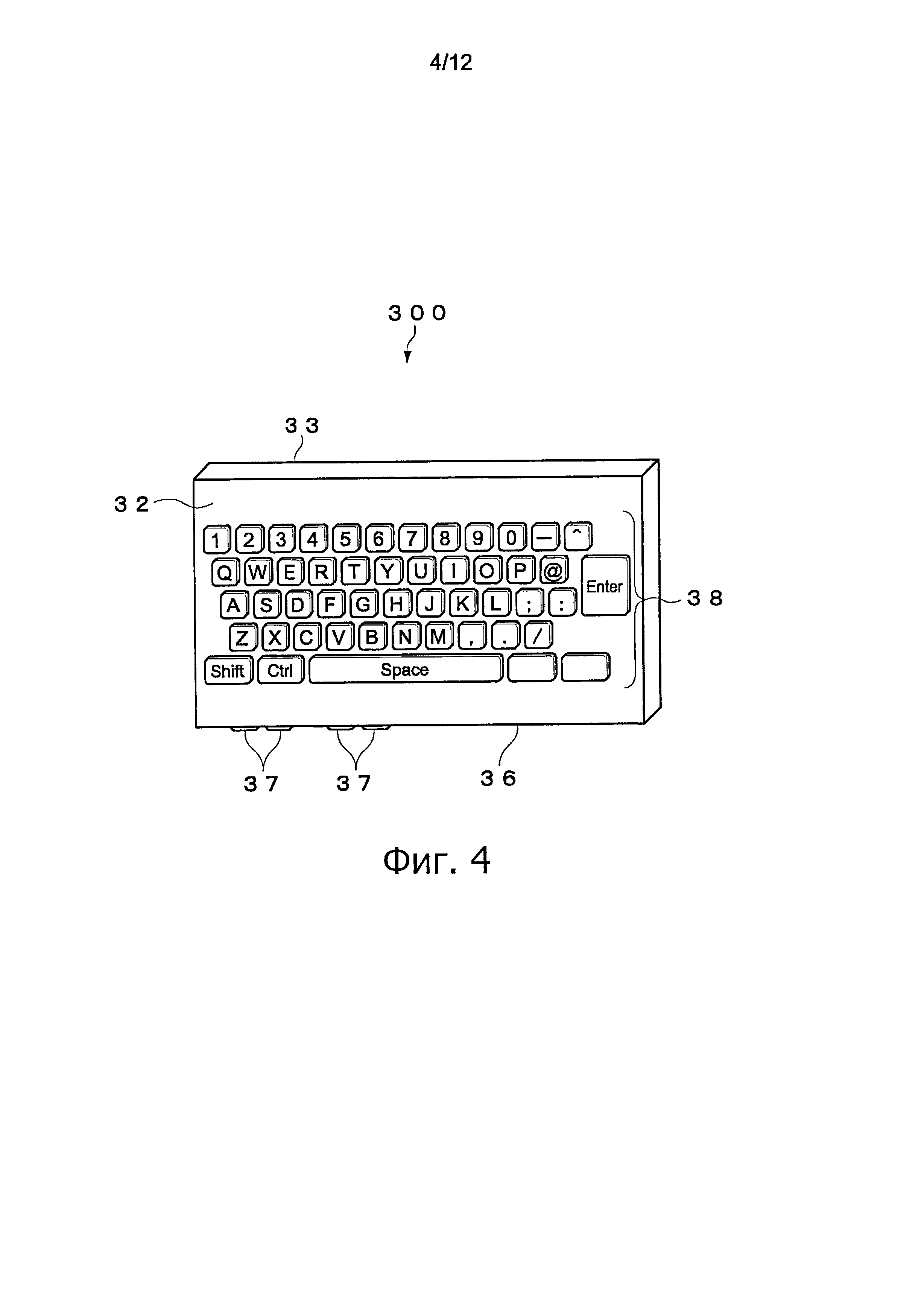
Фиг.4 - внешний вид со стороны поверхности клавиатуры устройства оперирования по фиг.1.
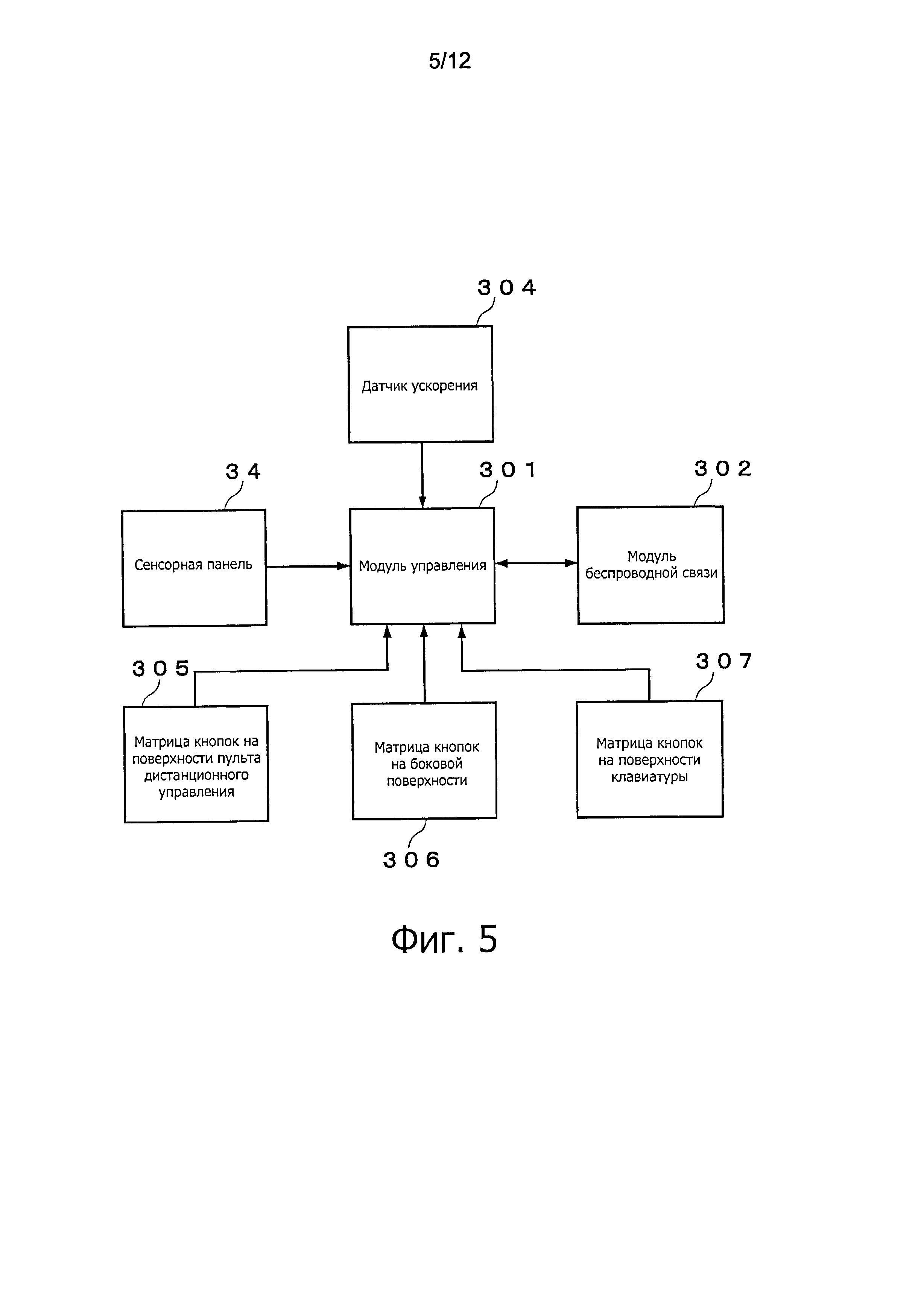
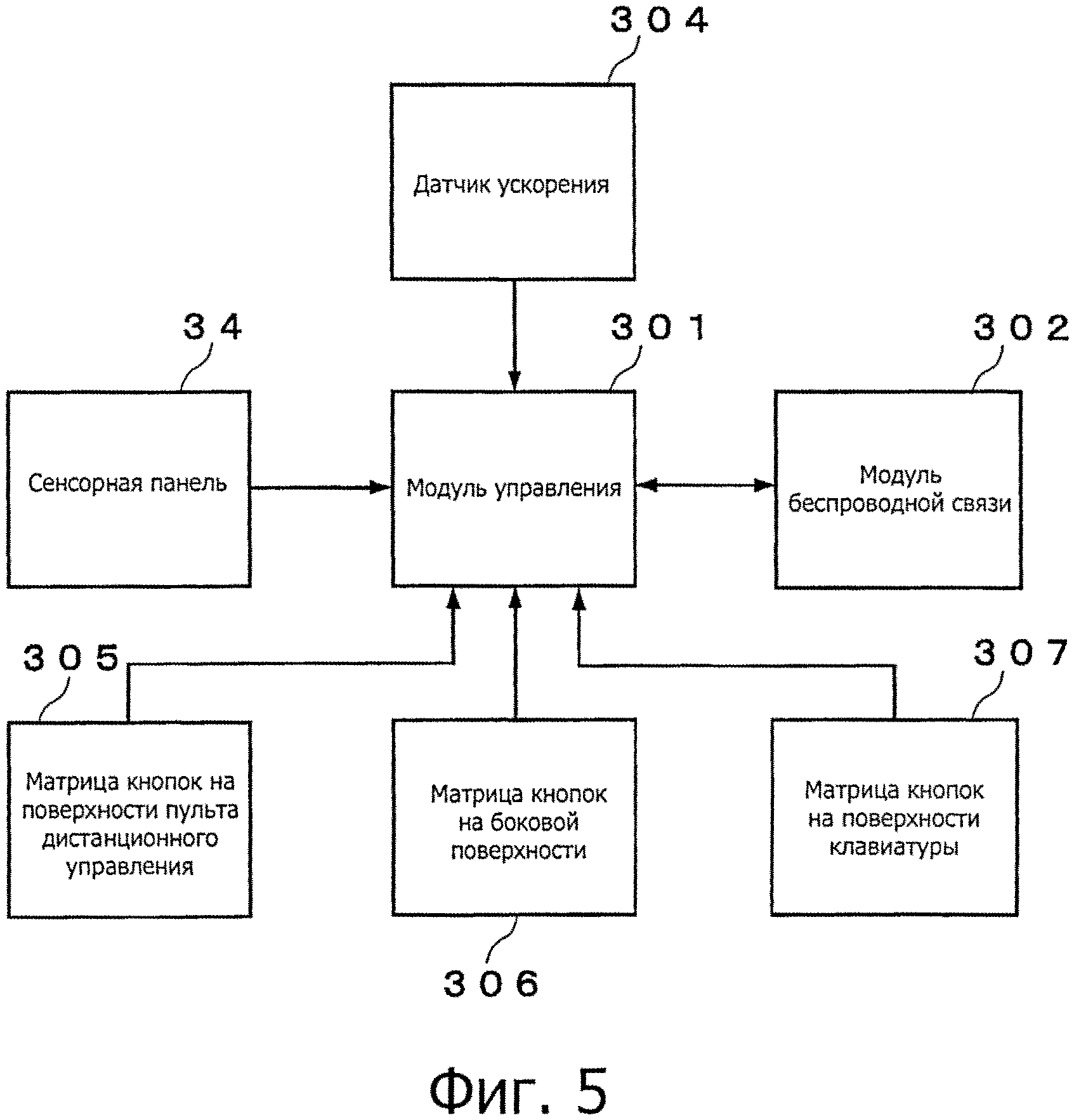
Фиг.5 - блок-схема, представляющая конфигурацию аппаратных средств устройства оперирования по фиг.1.
Фиг.6 - вид, представляющий положение операционной сенсорной панели устройства оперирования по фиг.1.
Фиг.7 - вид, представляющий положение операционной клавиатуры устройства оперирования по фиг.1.
Фиг.8 - вид, представляющий состояние, когда поверхность клавиатуры устройства оперирования по фиг.1 направлена к пользователю, и сенсорной панелью, размещенной на его задней поверхности, управляют в таком положении.
Фиг.9 - вид для пояснения системы координат сенсорной панели устройства оперирования по фиг.1.
Фиг.10 - вид для пояснения системы координат пространства обнаружения координат сенсорной панели, как можно было бы ее видеть сквозь устройство, со стороны поверхности клавиатуры, в устройстве оперирования по фиг.1.
Фиг.11 - вид, представляющий второе положение оперирования сенсорной панелью устройства оперирования в соответствии с модифицированным примером 1.
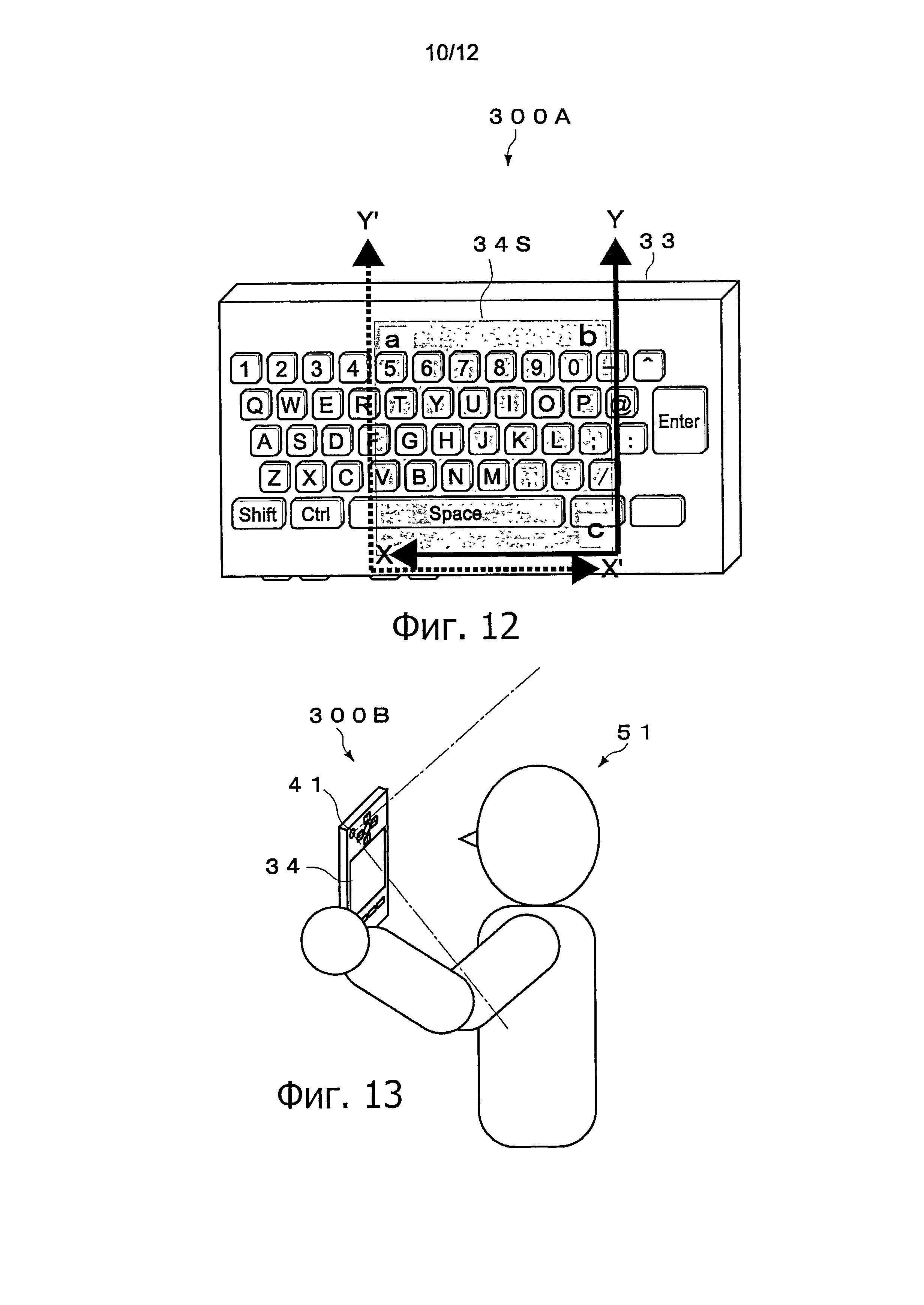
Фиг.12 - вид, представляющий положение оперирования сенсорной панелью устройства оперирования в соответствии с модифицированным примером 1.
Фиг.13 - вид для пояснения способа обнаружения положения устройства оперирования в соответствии с модифицированным примером 4.
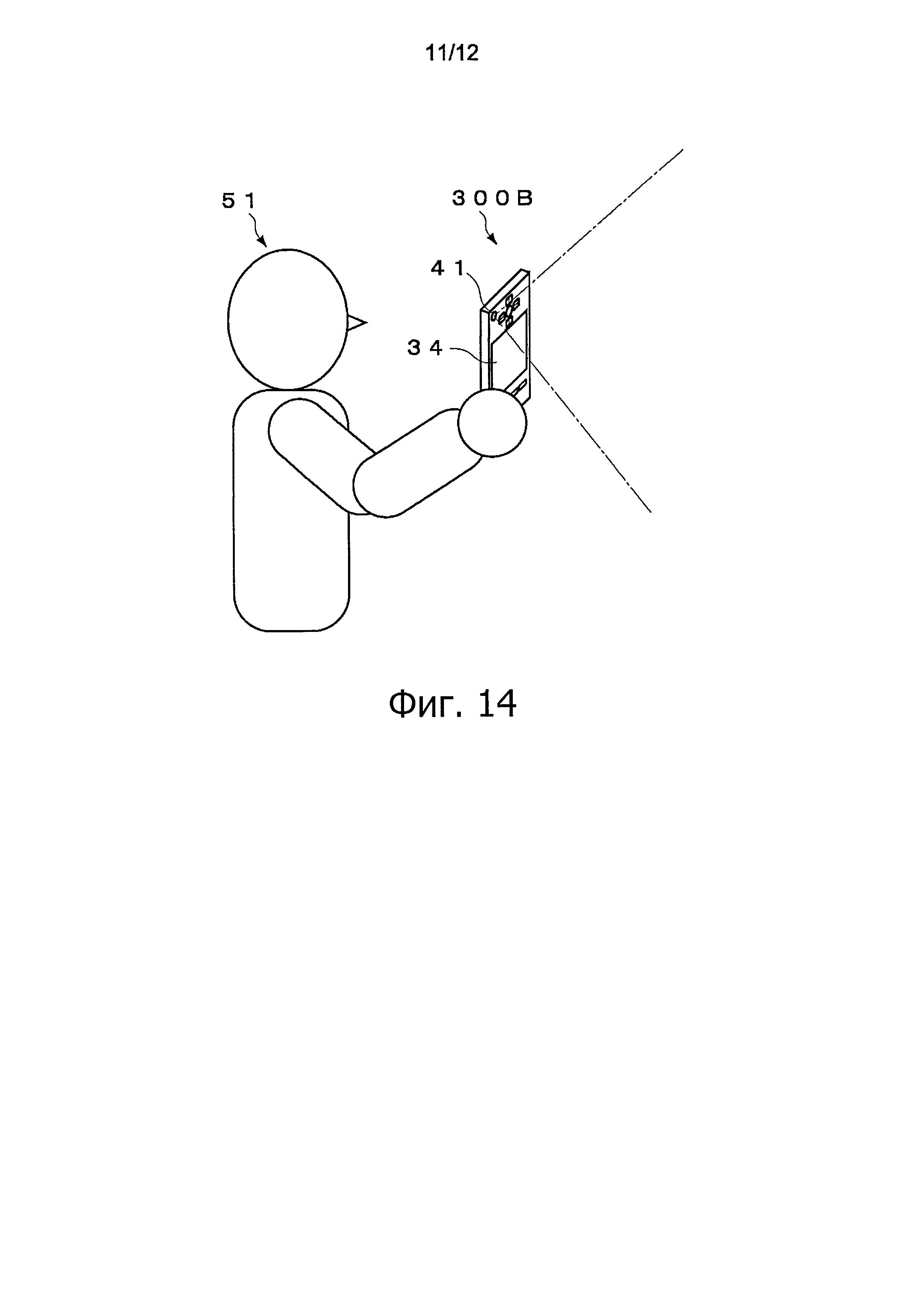
Фиг.14 - другой вид для пояснения способа обнаружения положения устройства оперирования в соответствии с модифицированным примером 4.
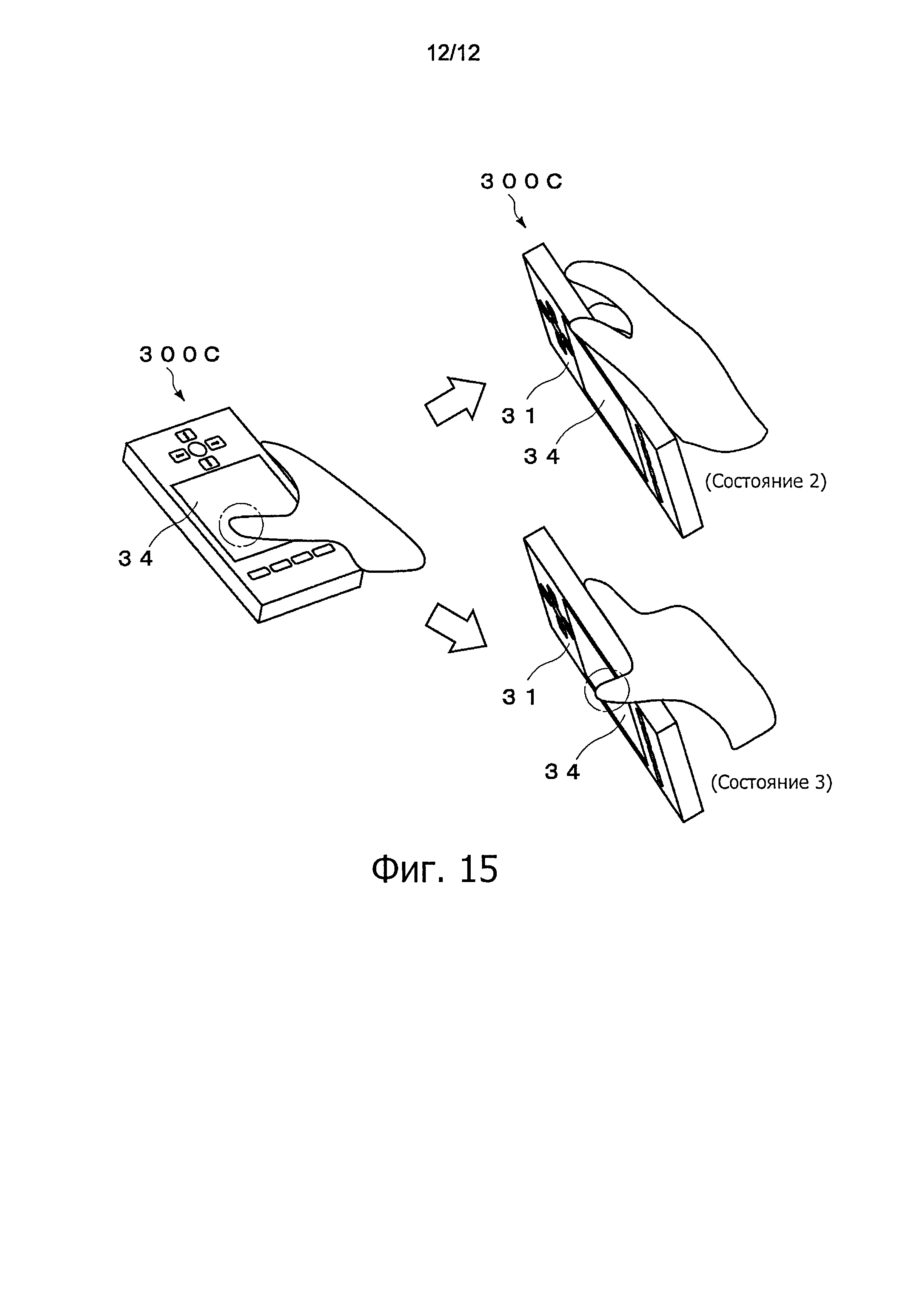
Фиг.15 - вид для пояснения устройства оперирования в соответствии с модифицированным примером 5.
Осуществление изобретения
Ниже, со ссылкой на чертежи, будет описан вариант осуществления, в соответствии с настоящей технологией.
Данный вариант осуществления относится к устройству оперирования, которое дистанционно управляет устройством обработки информации, таким как телевизионный приемник, игровая консоль, устройство записи и персональный компьютер, через канал передачи, такой как сигнал кабельной передачи, инфракрасный сигнал, RF сигнал и беспроводная LAN.
В последние годы устройства обработки информации стали значительно более многофункциональными. Например, существует телевизионный приемник и т.п., который соединен с Интернет, и позволяет использовать различные услуги Интернет. Ввиду этого, также было введено устройство дистанционного управления, в котором установлена клавиатура QWERTY, включающая в себя нормальное размещение кнопок, используемое, например, в клавиатуре персонального компьютера, сенсорную панель и т.п. Кроме того, в случае, когда клавиатура QWERTY, сенсорная панель и т.п. размещены на одной поверхности, видимой со стороны пользователя, размер поверхности устройства оперирования увеличивается, что приводит к увеличению размера устройства оперирования. Учитывая это, рассматривается возможность разработки клавиатуры QWERTY и устройства - указателя, такого как сенсорная панель, на двух поверхностях устройства оперирования, которые противоположны в направлениях вперед и назад.
В случае, когда клавиатура QWERTY, сенсорная панель и т.п. размещены на двух поверхностях устройства оперирования, которые противоположны в направлениях вперед и назад, в качестве режима оперирования сенсорной панелью и т.п., предполагается режим оперирования с сенсорной панелью и т.п., с поверхностью, на которой размещена клавиатура QWERTY, обращенная к пользователю. Когда выполняют оперирование с сенсорной панелью на задней поверхности, так что при этом поверхность, на которой размещена клавиатура QWERTY, обращена к пользователю, требуется, чтобы пользователь выполнял оперирование, представляя себе систему координат на сенсорной панели с задней стороны, и при этом трудно выполнять интуитивное оперирование. Таким образом, существенно снижается простота и удобство использования.
Устройство оперирования, в соответствии с данным вариантом осуществления, включает в себя встроенное устройство обнаружения, такое как датчик ускорения, необходимый для обнаружения положения. Такое устройство оперирования обнаруживает положение на основе значения обнаружения устройства обнаружения и определяет, какая из поверхностей, таких как первая поверхность, на которой размещена сенсорная панель, и вторая поверхность, на которой размещена клавиатура QWERTY, обращена к пользователю, и определяет ориентацию по вертикальному и горизонтальному положению устройства оперирования. На основе результата определения, устройство оперирования преобразует информацию координат и т.п., обнаруживаемую сенсорной панелью, в информацию системы координат пространства обнаружения координаты сенсорной панели, если смотреть со стороны второй поверхности, в зависимости от необходимости.
Далее будет подробно описано устройство оперирования, в соответствии с данным вариантом осуществления.
Первый вариант осуществления
На фиг.1 показана блок-схема, представляющая конфигурацию системы обработки информации в первом варианте осуществления, в соответствии с настоящей технологией. Как показано на чертеже, система 100 обработки информации в данном варианте осуществления включает в себя устройство 200 обработки информации, которое представляет собой цель оперирования, и устройство 300 оперирования, которое дистанционно управляет устройством 200 обработки информации. Устройство 200 обработки информации представляет собой любое устройство, если только оно имеет аппаратную конфигурацию основного компьютера, например, телевизионный приемник, персональный компьютер, устройство записи, проигрыватель, игровое устройство и т.п. В качестве альтернативы, устройство 200 обработки информации может представлять собой устройство, которое соединено с сетью, такой как Интернет, для обеспечения возможности просмотра веб-страницы и т.п.
Конфигурация устройства 200 обработки информации
На фиг.2 показан вид, представляющий конфигурацию аппаратных средства устройства 200 обработки информации.
В данном варианте осуществления будет описан случай, в котором телевизионный приемник используется в качестве устройства 200 обработки информации.
Устройство 200 обработки информации включает в себя центральное процессорное устройство (CPU) 201, шину 202, запоминающее устройство 203, накопитель 204, сетевой I/F 206 и модуль 207 беспроводной связи. Устройство 200 обработки информации дополнительно включает в себя антенну 209, тюнер 210, дескремблер 211, демультиплексор 212, аудиодекодер 213, видеодекодер 214, схему 215 обработки аудиоданных, громкоговоритель 216, модуль 217 наложения GUI, схему 218 видеообработки и устройство 219 отображения.
В устройстве 200 обработки информации CPU 201 выполняет различного типа обработку в соответствии с программами, сохраненными в запоминающем устройстве 203 или в накопителе 204, соединенном через шину 202.
Модуль 207 беспроводной связи выполняет беспроводную двунаправленную связь с устройством 300 оперирования. Примеры системы беспроводной связи включают в себя инфракрасную (IR) систему, RF систему, такую как Радиочастоты для бытовой электроники (RF4CE), которая представляет собой международный стандарт для RF пульта дистанционного управления для бытовых электрических устройств, и беспроводную LAN, совместимую со стандартом IEEE 802.11b и т.п.
Антенна 209 принимает цифровой сигнал широковещательной передачи и т.п., и вводит его в тюнер 210.
Тюнер 210 выделяет сигнал широковещательной передачи заданного канала из цифрового сигнала широковещательной передачи. Тюнер 210 выводит транспортный поток заданного канала, который получают путем обработки декодирования выделенного сигнала широковещательной передачи, в дескремблер 211.
Дескремблер 211 использует ключ выпуска, который заранее сохраняется в заданной 1C карте (не показана), установленной в устройстве 200 обработки информации, для дескремблирования транспортного потока, подаваемого от тюнера 210. Дескремблер 211 выводит транспортный поток, для которого было выполнено дескремблирование, в демультиплексор 212.
Демультиплексор 212 демультиплексирует аудиоданные и видеоданные из транспортного потока, для которого было выполнено дескремблирование, при этом транспортный поток поступает от дескремблера 211. Демультиплексор 212 выводит демультиплексированные аудиоданные в аудиодекодер 213, и выводит демультиплексированные видеоданные в видеодекодер 214.
Аудиодекодер 213 декодирует аудиоданные, подаваемые от демультиплексора 212, и выводит полученные аудиоданные на схему 215 обработки аудиоданных.
Схема обработки 215 аудиоданных подвергает аудиоданные, подаваемые от аудиодекодера 213, цифро-аналоговому (D/A) преобразованию, обработке усиления и т.п., и выводит полученный звуковой сигнал на громкоговоритель 216.
Видеодекодер 214 декодирует видеоданные, подаваемые от демультиплексора 212, и выводит полученные видеоданные на модуль 217 наложения графического интерфейса пользователя (GUI).
Модуль 217 наложения GUI накладывает графические данные, такие как отображение на экране (OSD) меню, на видеоданные, подаваемые от видеодекодера 214, и выводит их на схему 218 обработки видеоданных.
Схема 218 обработки видеоданных подвергает видеоданные, подаваемые от модуля 217 наложения GUI, заданной обработке изображения, цифро-аналоговому (D/A) преобразованию и т.п., и выводит полученный видеосигнал на устройство 219 отображения.
Кроме того, CPU 201 позволяет принимать цифровую широковещательную передачу на основе сигнала оперирования, относящегося к записи, от устройства 300 оперирования, или информацию для программируемой записи, которую устанавливают в запоминающем устройстве 203, получая транспортный поток заданного канала, и сохраняет его, как видеоданные и аудиоданные программы в накопителе 204.
Таким образом, устройство 200 обработки информации позволяет принимать цифровую широковещательную передачу и выводить эту программу через устройство 219 отображения и громкоговоритель 216 в состоянии, пригодном для просмотра, или записывать ее в накопитель 204. Кроме того, CPU 201 также выполнено с возможностью доступа к Интернет через сетевой I/F 206, или оно может отображать полученную веб-страницу на устройство 219 отображения.
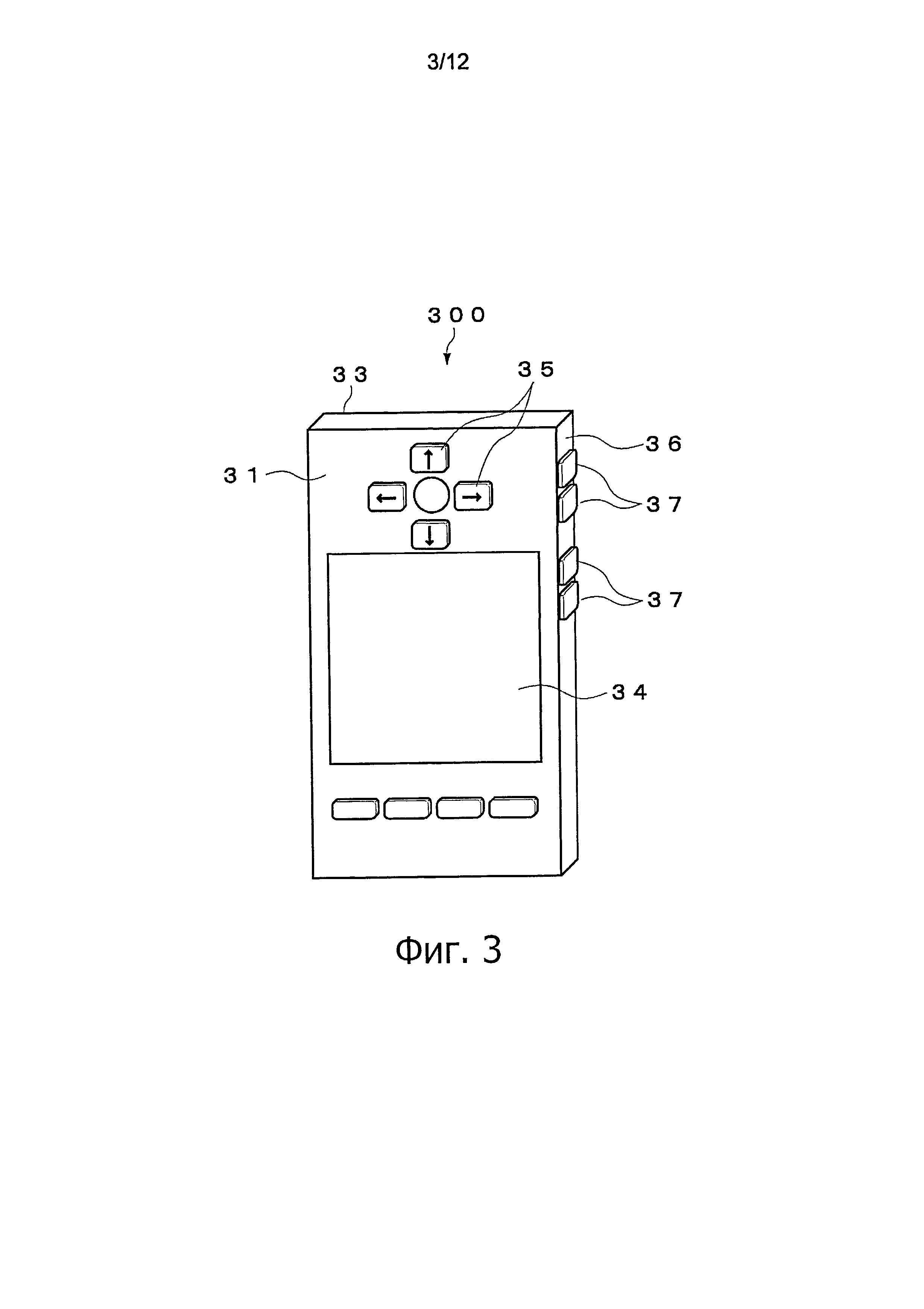
Конфигурация устройства 300 оперирования Далее будет описана конфигурация устройства 300 оперирования. На фиг.3 показан внешний вид со стороны поверхности пульта дистанционного управления устройства 300 оперирования. На фиг.4 показан внешний вид со стороны поверхности клавиатуры устройства 300 оперирования.
Как показано на фиг.3 и 4, устройство 300 оперирования включает в себя две прямоугольные поверхности, противоположные в направления вперед и назад, как основные поверхности 31 и 32, и кожух 33, имеющий форму прямоугольного параллелепипеда с, в сумме, шестью поверхностями, поверхности, имеющие достаточно малый размер в направлении оси (направление глубины), по сравнению с размером основных поверхностей 31 и 32 в направлении двух осей, направление осей (направление глубины), ортогональное к этим двум осям. Обе из этих двух основных поверхностей, противоположных в направлениях вперед и назад, представляют собой поверхности оперирования для пользователя. В частности, на одной из основной поверхности 31 (также называемой "поверхностью 31 пульта дистанционного управления"), предусмотрена сенсорная панель 34, и кнопки, такие как кнопки 35 курсора и т.п., в качестве первого модуля ввода оперирования. Сенсорная панель 34 расположена практически в центральной области одной основной поверхности 31. В связи с этим, оперирование сенсорной панелью 34 становится слепым оперированием для пользователя при выполнении оперирования в положении оперирования с клавиатурой (будет описана ниже). Определенная степень возможности выполнения слепого оперирования с сенсорной панелью 34 может обеспечиваться, благодаря тому, что центр поверхности 31 пульта дистанционного управления соответствует или практически соответствует центру координат сенсорной панели 34. На другой основной поверхности 32 (также называемой "поверхностью 32 клавиатуры"), противоположной поверхности 31 пульта дистанционного управления кожуха 33 в направлениях вперед и назад, предусмотрена клавиатура 38, такая как клавиатура QWERTY, в качестве второго модуля ввода оперирования. Среди четырех поверхностей (ниже каждая из них называется "боковой поверхностью"), других, чем поверхность 31 пульта дистанционного управления и поверхность 32 клавиатуры кожуха 33, например, по меньшей мере, на одной боковой поверхности 36 предусмотрено множество часто используемых кнопок 37 управления громкостью выбора канала и т.п.
На фиг.5 показана блок-схема, представляющая конфигурацию аппаратных средств устройства 300 оперирования.
Устройство 300 оперирования включает в себя модуль 301 управления, модуль 302 беспроводной связи, сенсорную панель 34, датчик 304 ускорения, матрицу 305 кнопок поверхности пульта дистанционного управления, матрицу 306 кнопок боковой поверхности и матрицу 307 кнопок поверхности клавиатуры.
Модуль 301 управления выполняет общее управление блоками, составляющими устройство 300 оперирования, управляет различными типами арифметической обработки и передачей данных между блоками.
Модуль 302 беспроводной связи выполняет двунаправленную беспроводную связь с устройством 200 обработки информации. Примеры системы беспроводной связи включают в себя инфракрасную (IR) систему, RF систему, такую, как Радиочастоты для бытовой электроники (RF4CE), которая представляет собой международный стандарт RF пульта дистанционного управления для бытовых электрических устройств, и беспроводную LAN, совместимую со стандартом IEEE 802.11b.
Сенсорная панель 34 представляет собой устройство для обнаружения координат положения, к которому прикоснулся пользователь. Сенсорная панель 34 состоит, например, из сенсорного датчика, системы с резистивной пленкой и т.п.
Датчик 304 ускорения представляет собой датчик для обнаружения ускорения в направлении по трем осям (ось X, ось Y и ось Z). Сигнал обнаружения датчика 304 ускорения подают на модуль 301 управления и обрабатывают, как информацию обнаружения положения устройства 300 оперирования. Следует отметить, что средство обнаружения положения устройства 300 оперирования включает в себя, в дополнение к датчику 304 ускорения, гиродатчик и т.п., который обнаруживает угол относительно направления силы тяжести. Кроме того, здесь присутствует, например, способ обнаружения положения устройства 300 оперирования таким образом, что камера (не показана) снимает изображение контура, просматриваемого устройством 300 оперирования, и модуль 301 управления устройства 300 оперирования, CPU 201 в устройстве 200 обработки информации и т.п. анализирует снятое изображение.
Матрица 305 кнопок на поверхности пульта дистанционного управления обнаруживает оперирование, выполненное в отношении кнопок 35 курсора и т.п., предусмотренных на поверхности 31 пульта дистанционного управления и уведомляет модуль 301 управления об этом.
Матрица 306 кнопок на боковой поверхности обнаруживает оперирование в отношении кнопок 37, предусмотренных на боковой поверхности 36 кожуха 33, и уведомляет модуль 301 управления об этом.
Матрица 307 кнопок на поверхности 32 клавиатуры обнаруживает оперирование в отношении клавиатуры 38 и уведомляют модуль 301 управления об этом.
Пояснение оперирования
Далее будет описано оперирование устройства 300 оперирования, в соответствии с данным вариантом осуществления.
Модуль 301 управления устройства 300 оперирования выполняет следующее управление на основе заранее встроенной программы преобразования информации об обнаружении от сенсорной панели.
Модуль 301 управления устройства 300 оперирования определяет положение оперирования устройства 300 оперирования на основе результата обнаружения, полученного датчиком 304 ускорения (модулем определения).
Положение, в котором выполняется оперирование с устройством 300 оперирования, в соответствии с данными вариантами осуществления, включает в себя, по меньшей мере, два следующих основных положения.
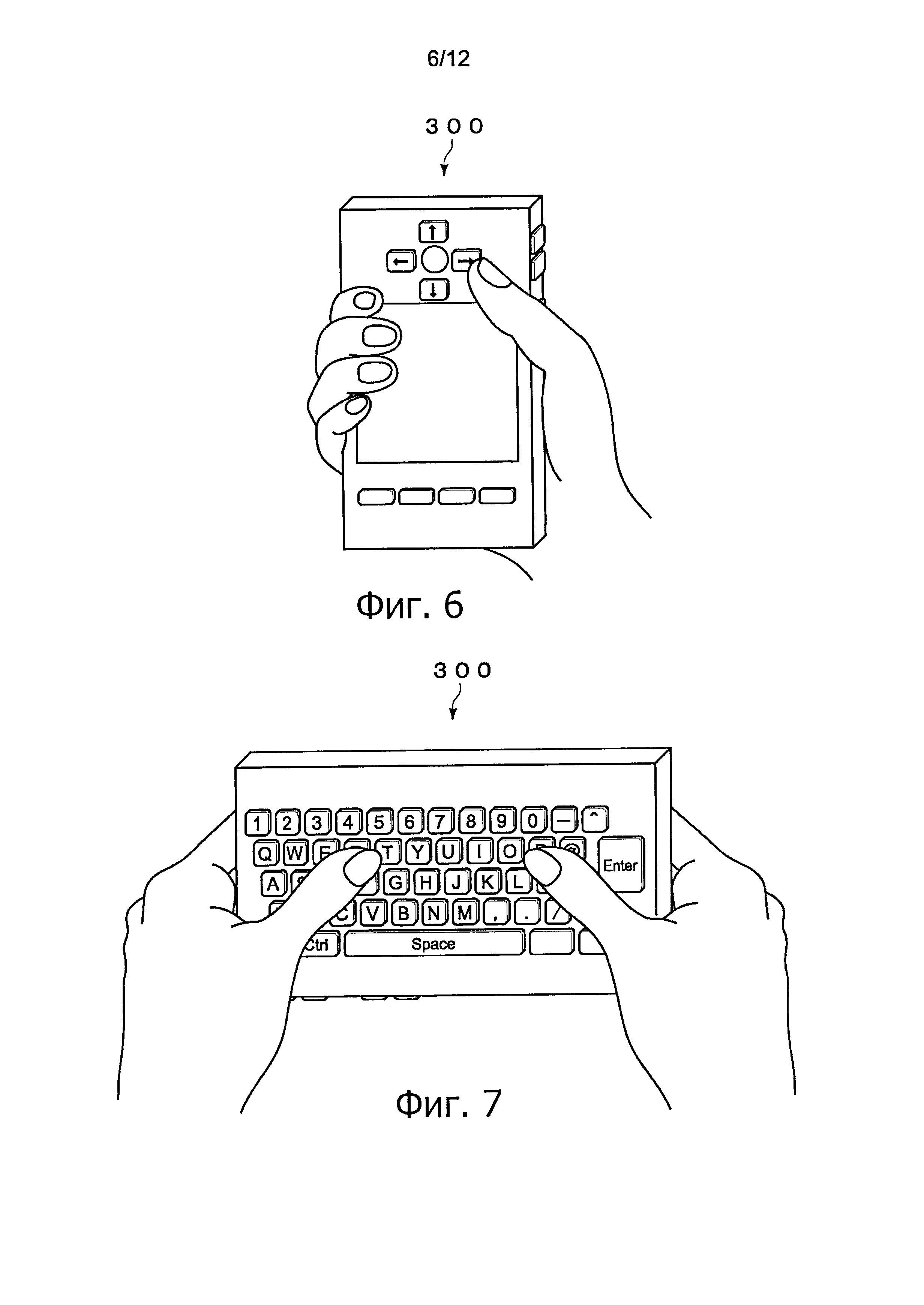
1. Положение в вертикальном направлении, когда поверхность 31 пульта дистанционного управления направлена к пользователю (ниже называется "положением оперирования с сенсорной панелью") (см. фиг.6).
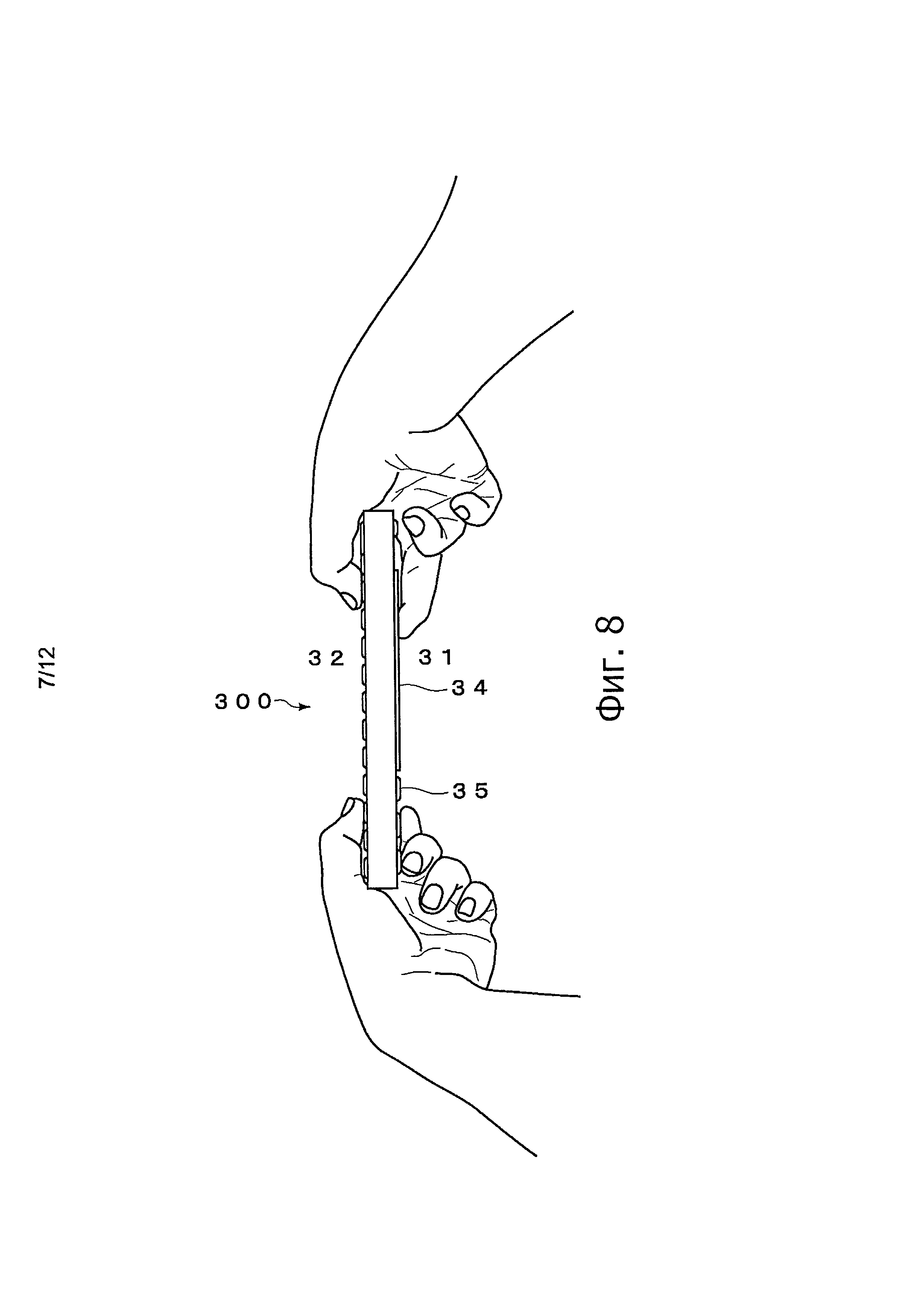
2. Положение в горизонтальном направлении, когда поверхность 32 клавиатуры обращена к пользователю (см. фиг.7) (ниже называется "положением оперирования клавиатуры"). Использование в горизонтальном направлении связано с тем, что кнопки клавиатуры 38, такой как клавиатура QWERTY, размещены в длину, в горизонтальном направлении. Пользователь выполняет ввод, нажимая на кнопки пальцами обеих рук, удерживая оба концевых участка устройства 300 оперирования обеими руками. Кроме того, когда выполняется оперирование в таком положении, как показано на фиг.8, пользователь также может выполнять оперирование с сенсорной панелью 34, скользя пальцами по задней стороне (поверхности 31 стороны пульта дистанционного управления).
На основе результата обнаружения, полученного датчиком 304 ускорения, способ определения положения оперирования устройства 300 оперирования включает в себя, например, следующее.
1. Модуль 301 управления определяет, на основе выхода датчика 304 ускорения, которая из поверхности 31 пульта дистанционного управления и поверхности 32 клавиатуры в большей степени направлена в направлении силы тяжести. Модуль 301 управления определяет, что она представляет собой положение оперирования с клавиатурой, если поверхность 31 пульта дистанционного управления в большей степени направлена в направлении силы тяжести, и определяет, что она представляет собой положение оперирования сенсорной панели, если поверхность 32 клавиатуры в большей степени направлена в направлении силы тяжести.
2. Определяют, которое из продольного направления и короткого направления устройства 300 оперирования в большей степени направлено в направлении силы тяжести. Модуль 301 управления определяет, что положение представляет собой положение оперирования сенсорной панели, если продольное направление устройства 300 оперирования в большей степени направлено в направлении силы тяжести, и определяет, что положение представляет собой положение оперирования клавиатуры, если короткое направление в большей степени направлено в направлении силы тяжести.
3. Используются оба из двух способов определения, описанных выше. Таким образом, если модуль 301 управления определяет, что поверхность пульта 31 дистанционного управления в большей степени направлена в направлении силы тяжести, и короткое направление в большей степени направлено в направлении силы тяжести, модуль 301 управления определяет, что устройство находится в положении оперирования с клавиатурой. Кроме того, если модуль 301 управления определяет, что поверхность 32 клавиатуры в большей степени направлена в направлении силы тяжести, и продольное направление в большей степени направлено в направлении силы тяжести, модуль 301 управления определяет, что устройство находится в положении оперирования с сенсорной панелью. В других случаях модуль 301 управления игнорирует их.
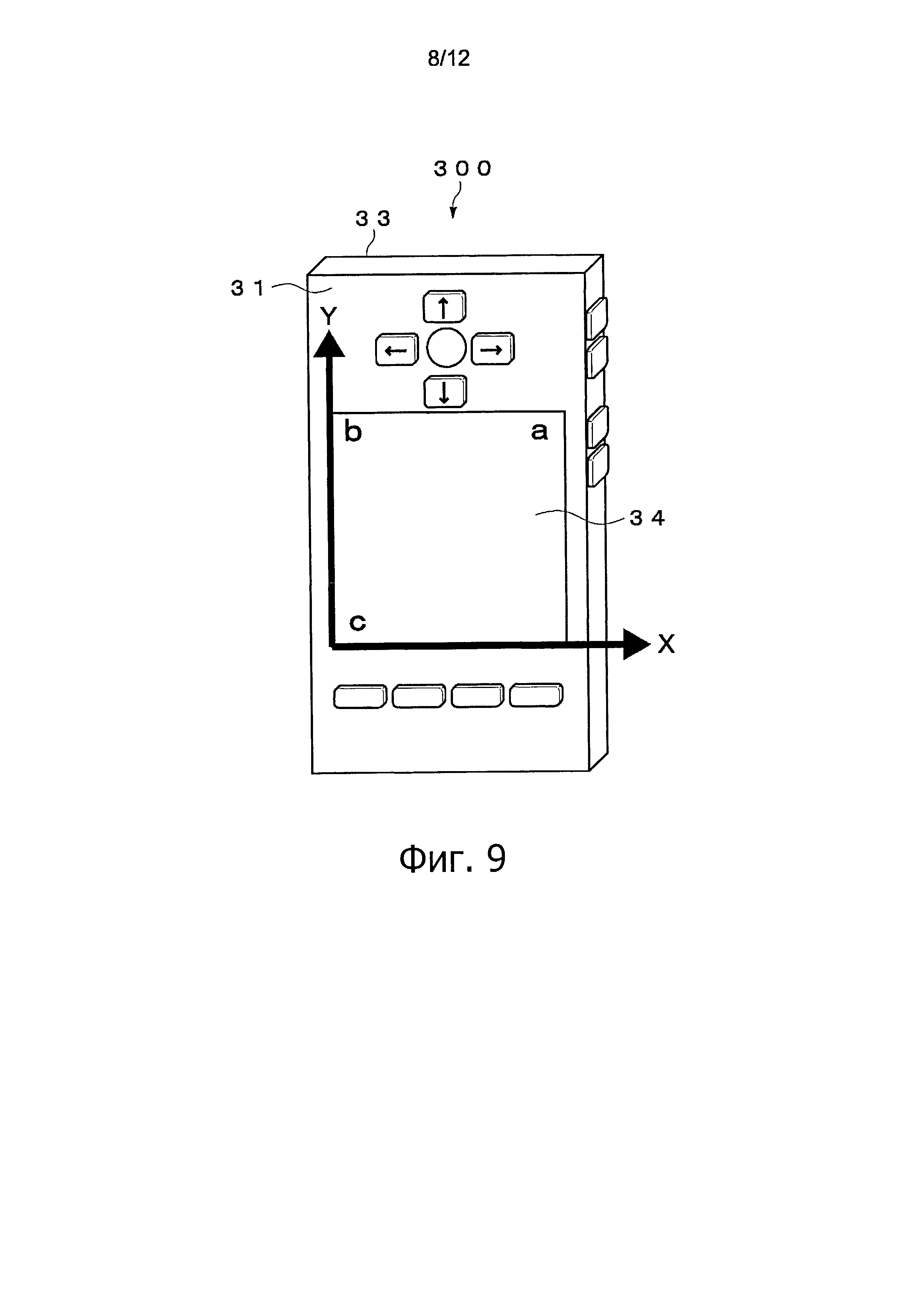
Когда модуль 301 управления определяет, что положение представляет собой оперирование с сенсорной панелью, модуль 301 управления поддерживает состояние действительности выходной информации сенсорной панели 34. Здесь система координат пространства обнаружения координаты сенсорной панели 34 выполнена, как показано на фиг.9, при этом одно из направлений влево и вправо представляют собой направление оси X, и направления вверх и вниз представляют собой направление оси Y, предполагая, что точка в нижнем левом углу сенсорной панели 34 представляет собой начало координат (X=0, Y=0).
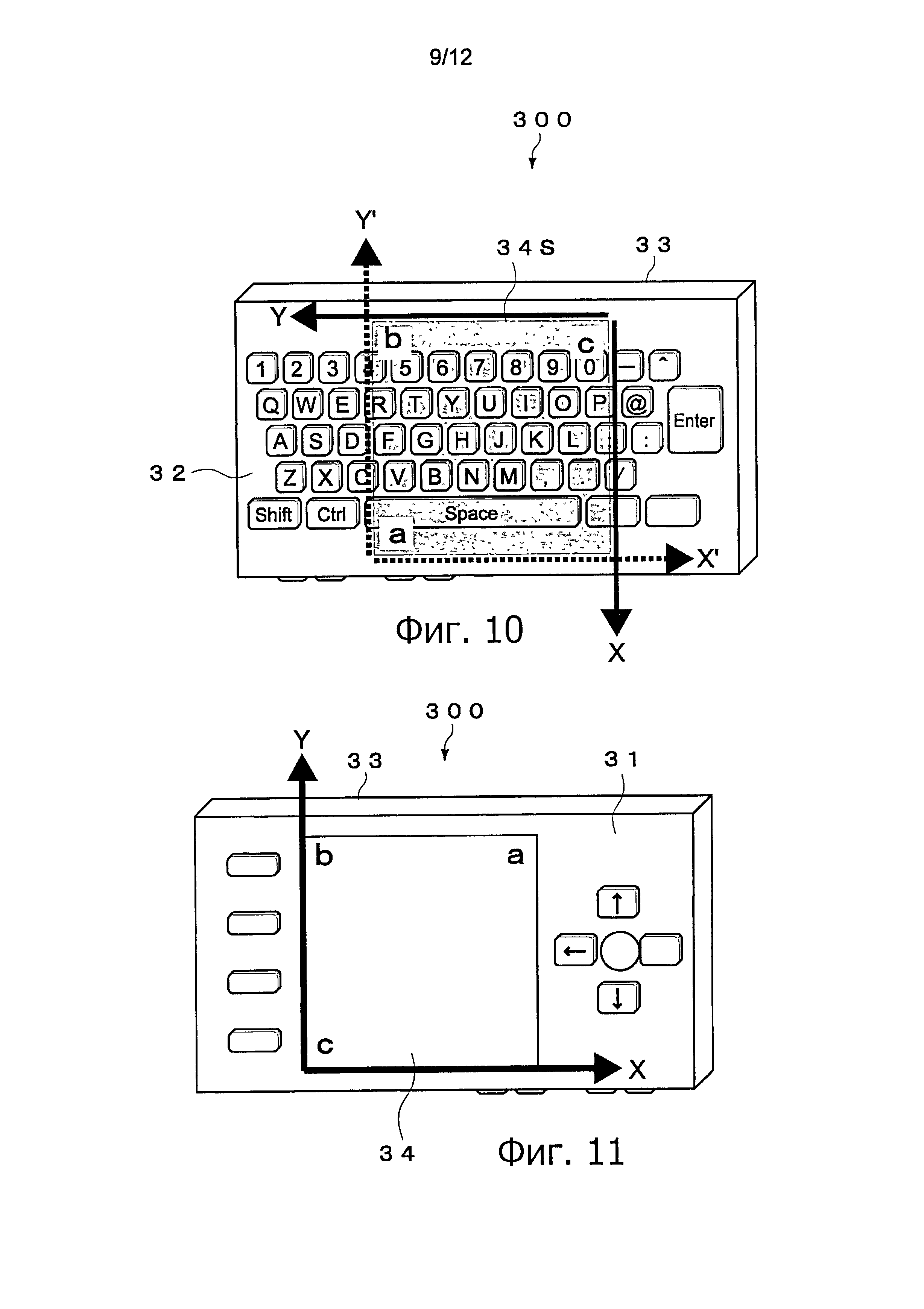
В отличие от этого, как показано на фиг.10, если положение представляет собой оперирование с клавиатурой, система координат для пространства обнаружения координат сенсорной панели 34 и система координат для пространства 34S обнаружения координат сенсорной панели 34, если смотреть со стороны поверхности 32 клавиатуры, является зеркально симметричной и находится в состоянии симметрии вращения с поворотом на 180 градусов. Поэтому, если определяют, что данное положение представляет собой оперирование клавиатуры, модуль 301 управления преобразует координаты (X, Y), обнаруживаемые сенсорной панелью 34, в координаты (X', Y') системы координат пространства 34S обнаружения координат сенсорной панели 34, если смотреть со стороны поверхности 32 клавиатуры, в соответствии со следующим вычислением (преобразователем).
X'=α-Y,
Y'=β-X,
где α обозначает длину сенсорной панели 34 в направлении оси Y и β обозначает длину сенсорной панели 34 в направлении оси X.
Следует отметить, что здесь предполагается, что сенсорная панель 34 имеет идентичную длину в направлении оси X и в направлении оси Y. В отличие от этого, если длина в направлении оси X отличается от длины в направлении оси Y (если пространство обнаружения координат сенсорной панели 34 выполнено прямоугольным), после упомянутого выше преобразования, требуется только отрегулировать значения Y и X, используемые в этой формуле вычисления, используя преобразование шкалы, коррекцию центра, применяя оба эти полхода и т.п., в зависимости от соотношения размеров.
Преобразуя координаты, обнаруженные в отношении оперирования сенсорной панели 34 в положении оперирования клавиатуры, в координаты системы координат пространства 34S обнаружения координаты сенсорной панели 34, если смотреть со стороны поверхности 32 клавиатуры, таким образом, может быть выполнено оперирование сенсорной панелью 34 в положении оперирования клавиатурой, в соответствии с ощущением пользователя системы координат.
В частности, если модули ввода оперирования предусмотрены на задней и передней сторонах кожуха 33, как описано выше, существует вероятность того, что будет выполнено ошибочное оперирование с кнопкой и т.п. модуля ввода оперирования на задней стороне, если смотреть со стороны пользователя. Поэтому, в устройстве 300 оперирования, в соответствии с этими вариантами осуществления, модуль 301 управления выполняет управление перевода модуля ввода оперирования, предусмотренного на задней поверхности, если смотреть со стороны пользователя, в состояние остановки, в зависимости от положения оперирования, определенного на основе выхода датчика 304 ускорения. Например, если определяют, что положение представляет собой оперирование с клавиатурой, модуль 301 управления выполняет управление для перевода в состояние остановки обнаружения в отношении оперирования с кнопками, такими как кнопки 35 курсора, предусмотренные на поверхности 31 пульта дистанционного управления. Это позволяет предотвратить ошибочное оперирование модулем ввода оперирования, предусмотренного на задней поверхности, если смотреть со стороны пользователя.
Модифицированный пример 1
Далее будет описан модифицированный пример упомянутого выше варианта осуществления.
Устройство 300А оперирования, в соответствии с данным модифицированным примером, отличается от упомянутого выше варианта осуществления двумя основными положениями для выполнения оперирования.
1а. Положение в поперечном направлении, когда поверхность 31 пульта дистанционного управления направлена на пользователя (ниже называется "вторым положением оперирования сенсорной панели") (см. фиг.11).
2b. Положение в поперечном направлении, при этом поверхность 32 клавиатуры направлена на пользователя (см. фиг.12) (ниже называется "положением оперирования клавиатуры"). Такое положение оперирования клавиатуры является таким же, как в упомянутом выше варианте осуществления.
Как показано на фиг.11, если определяют, что положение представляет собой второе положение оперирования с сенсорной панелью, модуль 301 управления поддерживает действительность выходной информации с сенсорной панели 34. В отличие от этого, как показано на фиг.12, если положение представляет собой положение оперирования клавиатурой, система координат сенсорной панели 34 и система координат пространства 34S обнаружения координат сенсорной панели 34, если смотреть со стороны поверхности 32 клавиатуры, находятся в зеркальном симметричном взаимном положении. Поэтому, если определяют, что данное положение представляет собой оперирование клавиатурой, модуль 301 управления устройства 300А оперирования преобразует координаты (X, Y), обнаруживаемые сенсорной панелью 34, в координаты (X', Y') системы координат пространства 34S обнаружения координат сенсорной панели 34, если смотреть сквозь поверхность 32 клавиатуры, в соответствии со следующим расчетом.
X'=α-X,
Y'=Y,
где α обозначает длину сенсорной панели 34 в направлении Оси Y.
Следует отметить, что в этом модифицированном примере 1 на основе результата обнаружения, полученного датчиком 304 ускорения, определяют положение оперирования устройства 300А оперирования, например, следующим образом.
1. Модуль 301 управления определяет, какая из поверхности 31 пульта дистанционного управления и поверхности 32 клавиатуры в большей степени направлена в направлении силы тяжести, на основе выхода датчика 304 ускорения. Модуль 301 управления определяет, что положение представляет собой операцию клавиатуры, если определяют, что поверхность 31 пульта дистанционного управления в большей степени направлена в направлении силы тяжести, и определяет, что положение представляет собой оперирование сенсорной панелью, если определяют, что поверхность 32 клавиатуры в большей степени направлена в направлении силы тяжести.
Путем преобразования координат системы координат сенсорной панели 34, обнаруженных в отношении оперирования сенсорной панели 34 в положении оперирования клавиатуры, в координаты системы координат пространства 34S обнаружения координат сенсорной панели 34, если смотреть с поверхности 32 клавиатуры таким образом, оперирование сенсорной панели 34 в положении оперирования клавиатурой может быть выполнена в соответствии с ощущением пользователя системы координат.
Модифицированный пример 2
Далее будет описан модифицированный пример 2 описанного выше варианта осуществления.
Выше был описан случай, когда координаты, обнаруживаемые сенсорной панелью 34, подвергают обработке преобразования.
В данном модифицированном примере 2, не координаты, а информацию движения (величину движения и направление движения), более конкретно, устанавливают разность между координатами двух точек элементов обнаружения, таких как пальцы, движущиеся за единицу времени, как цель обработки преобразования.
В этом случае используют следующие формулы вычисления для преобразования информации движения (x, y), обнаруживаемой сенсорной панелью 34 в информацию движения (x', y') в системе координат пространства 34S обнаружения координат сенсорной панели 34, если смотреть со стороны поверхности 32 клавиатуры.
Предположим, что положение в вертикальном направлении, когда поверхность 31 пульта дистанционного управления направлена на пользователя, и положение в горизонтальном направлении, когда поверхность 32 клавиатуры направлена на пользователя, представляют собой основные положения для выполнения оперирования,
x'=-y,
y'=-x.
Далее предположим, что положение в горизонтальном направлении, когда поверхность 31 пульта дистанционного управления направлена на пользователя, и положение в горизонтальном направлении, когда поверхность 32 клавиатуры направлена на пользователя, представляют собой основные положения при выполнении оперирования,
x'=-x,
y'=y.
Следует отметить, что здесь предполагается, что сенсорная панель 34 имеет идентичную длину в направлении оси X и в направлении оси Y. В отличие от этого, если длина в направлении оси X отличается от длины в направления оси Y (пространство обнаружения координат сенсорной панели 34 является прямоугольным), после описанного выше преобразования, значения Y и X, используемые в этих расчетных формулах требуется только отрегулировать, используя преобразование шкалы, коррекцию центра, используя оба этих подхода и т.п., в зависимости от соотношения размеров.
Модифицированный пример 3
Управление преобразованием координат, остановка обнаружения кнопок и т.п., в соответствии с описанным выше вариантом осуществления и модифицированные примеры могут быть выполнены не модулем 301 управления устройства 300 оперирования, a CPU 201 (фиг.2) устройства 200 обработки информации, которое представляет собой цель управления устройства 300 оперирования. В случае, когда устройство 300 оперирования и устройство 200 обработки информации выполнено с возможностью выполнения относительно высокоскоростной беспроводной связи, например, RF сигнал, беспроводная LAN, и т.п., управление CPU 201 устройства обработки 200 информации также может работать в достаточном на практике режиме реального времени.
Модифицированный пример 4
В описанном выше варианте осуществления положение устройства 300 оперирования определяют, используя датчик 304 ускорения. Однако, положение устройства 300 оперирования может быть определено на основе изображения, снятого камерой, предусмотренной для устройства 300 оперирования.
На фиг.13 и 14 показаны виды, каждый из которых представляет состояние, в котором положение устройства 300 В оперирования определяют на основе изображения, снятого камерой, предусмотренной в устройстве 300 В оперирования.
В устройстве 300 В оперирования объектив 41 камеры предусмотрен на любой из поверхности пульта 31 дистанционного управления и поверхности 32 клавиатуры. В представленном примере объектив 41 камеры предусмотрен на стороне поверхности пульта дистанционного управления.
Модуль 301 управления устройства 300В оперирования распознает пользователя 51, например, используя соответствие структуры изображения лица пользователя 51, снятого с помощью камеры. Если распознанный пользователь 51 соответствует пользователю, зарегистрированному заранее, модуль 301 управления определяет, что устройство 300 В оперирования находится в положении, в котором поверхность 31 пульта дистанционного управления направлена на пользователя 51 (см. фиг.13). В отличие от этого, если зарегистрированное лицо пользователя не будет распознано, модуль 301 управления определяет, что устройство 300В оперирования находится в положении, в котором поверхность 32 клавиатуры направлена на пользователя 51 (см. фиг.14).
Далее, путем комбинирования определения положения с помощью камеры, с результатом определения горизонтального/вертикального положения устройства 300 В оперирования датчиком 304 ускорения, также возможно установить конечный результат определения положения устройства 300 В оперирования.
Это позволяет точно определять положение устройства 300 В оперирования. Например, устройство 300 В оперирования может работать в положении ниже, чем высота глаз пользователя 51, или с ним можно работать в положении выше, чем высота глаз пользователя 51. В соответствии со способом модифицированного примера 3, положение оперирования сенсорной панели и положение оперирования клавиатуры можно точно определять в обоих состояния.
Модифицированный пример 5
В состоянии, в котором элемент обнаружения, такой как палец, обнаруживает на сенсорной панели 34, определение положения оперирования сенсорной панели и положения оперирования клавиатуры на основе снятого изображения камеры или выхода датчика 304 ускоряющего, может быть отключено.
На фиг.15 показан вид, представляющий состояние такого управления.
Когда положение устройства 300С оперирования изменяется от положения оперирования сенсорной панели (состояние 1) до положения, в котором поверхность 31 пульта дистанционного управления в большей степени направлена в направлении силы тяжести (состояние 2), модуль 301 управления определяет, на основе выхода датчика 304 ускорения, что положение устройства 300С оперирования изменяется на положение оперирования клавиатурой. В это время, если палец и т.п.находится в контакте с сенсорной панелью 34 (состояние 3), то есть, если информацию выводят от сенсорной панели 34, модуль 301 управления отключает определение положения оперирования сенсорной панелью и положения оперирования клавиатурой на основе снятого изображения камеры и выхода датчика 304 ускорения. Таким образом, управление выполняют, предполагая, что положение устройства 300С оперирования остается в положении оперирования сенсорной панелью.
Таким образом, путем изменения положения, которое происходит при оперирования ввода на поверхности 31 пульта дистанционного управления, становится возможным предотвратить остановку обнаружения оперирования с кнопкой, представленной на поверхности 31 пульта дистанционного управления, несмотря на намерение пользователя.
Используя аналогичный принцип, в состоянии, в котором нажатие на кнопку на клавиатуре 38 обнаруживается в положении оперирования клавиатурой, определение положения оперирования с сенсорной панелью и положения оперирования с клавиатурой, на основе снятого изображения, полученного камерой и из выходного сигнала датчика 304 ускорения, может быть отключено.
Кроме того, до тех пор, пока не будет выполнено оперирование с кнопкой оперирования поверхности пульта дистанционного управления с более высокой частотой, чем заданное значение, определенное с учетом частоты выполнения нормального оперирования, определение положения оперирования с сенсорной панелью и положения оперирования с клавиатурой, на основе выхода датчика 304 ускорения, может быть отключено, и может быть выполнено управление в положении оперирования с сенсорной панелью.
Аналогично, до тех пор, пока с кнопкой клавиатуры 38 не будет выполнено оперирование частотой выше, чем заданное значение, определенное с учетом частоты при нормальном оперировании, определение положения оперирования с сенсорной панелью и положения оперирования с клавиатурой, на основе выхода датчика 304 ускорения, может быть отключено, и может быть выполнено управление в положении оперирования с клавиатурой.
Следует отметить, что настоящая технология также может принимать следующие конфигурации.
(1) Устройство оперирования, включающее в себя:
кожух, содержащий две поверхности, противоположные в направлениях вперед и назад, в качестве первой поверхности и второй поверхности;
первый модуль ввода оперирования, обеспеченный на первой поверхности и содержащий устройство обнаружения, выполненное с возможностью обнаружения пользовательского оперирования в заданном пространстве обнаружения координаты на первой поверхности;
второй модуль ввода оперирования обеспечиваемый на второй поверхности;
модуль определения для определения положения кожуха, при осуществлении пользовательского оперирования в пространстве обнаружения координат устройством обнаружения со стороны второй поверхности; и
преобразователь для преобразования, при определении положения, информации, обнаруживаемой устройством обнаружения, в информацию системы координат для пространства обнаружения координат, как при просмотре со стороны второй поверхности.
(2) Устройство оперирования по п.(1), в котором
устройство обнаружения выполнено с возможностью обнаружения координат, определенных пользователем на пространстве обнаружения координат, а
преобразователь выполнен с возможностью преобразования посредством осуществления вычисления по формулам
X'=α-Y,
Y'=β-X,
при этом координаты, обнаруженные устройством обнаружения, обозначены как (X, Y), координаты, обнаруживаемые в системе координат пространства обнаружения координат, при просмотре со стороны второй поверхности обозначены как (X', Y'), длина пространства обнаружения координаты в направлении оси Y обозначена как α, a длина пространства обнаружения координаты в направлении оси X обозначена как β.
(3) Устройство оперирования по пп.(1) или (2), в котором
первый модуль ввода оперирования, кроме устройства обнаружения, включает в себя одну или более кнопок оперирования,
при этом устройство оперирования, дополнительно, содержит модуль управления, выполненный с возможностью перевода обнаружения оперирования посредством модуля кнопок оперирования в состояние остановки, при определении положения.
(4) Устройство оперирования по любому из пп.(1)-(3), в котором модуль управления выполнен с возможностью установки определения положения в состояние остановки, при выводе информации устройством обнаружения.
(5) Устройство оперирования по любому из пп.(1)-(4), в котором модуль управления выполнен с возможностью установки определения положения в состояние остановки, при выполнении оперирования посредством второго модуля ввода оперирования.
(6) Устройство оперирования по любому из пп.(1)-(4), в котором модуль определения включает в себя модуль получения изображения, выполненный с возможностью съемки изображения, расположенного перед любой одной из первой поверхности и второй поверхности; а
модуль определения выполнен с возможностью определения положения, дополнительно, посредством изображения, снятого модулем получения изображения.
(7) Устройство оперирования по п.(1), в котором
устройство обнаружения выполнено с возможностью обнаружения координат, определенных пользователем относительно пространства обнаружения координат, а
преобразователь выполнен с возможностью преобразования посредством осуществления вычисления по формулам
X'=α-X,
Y'=Y,
при этом координаты обнаружения, полученные в системе координат устройства обнаружения координат, обозначены как (X, Y), координаты обнаружения в системе координат пространства обнаружения координат, видимые со стороны второй поверхности, обозначены как (X', Y'), длина пространства обнаружения устройства обнаружения координат в направлении оси Y обозначена как α.
(8) Устройство оперирования по п.(7), в котором
первый модуль ввода оперирования, кроме устройства обнаружения, включает в себя одну или более кнопок оперирования, при этом устройство обнаружения, дополнительно, содержит:
модуль управления, выполненный с возможностью перевода обнаружения оперирования модулем кнопок оперирования в состояние остановки, при определении положения.
(9) Устройство оперирования по пп.(7) или (8), в котором модуль определения выполнен с возможностью установки определения положения в состоянии остановки, при выводе информации от устройства обнаружения.
(10) Устройство оперирования по любому из пп.(7)-(9), в котором модуль управления выполнен с возможностью установки определения положения в состояние остановки, при осуществлении оперирования посредством второго модуля ввода оперирования.
(11) Устройство оперирования по любому из пп.(7)-(10), в котором модуль определения включает в себя модуль получения изображения, выполненный с возможностью из съемки изображения перед любой одной из первой поверхности и второй поверхности; а
модуль определения выполнен с возможностью определения положения, дополнительно, посредством изображения, полученного модулем получения изображения.
(12) Устройство оперирования по п.(1), в котором
устройство обнаружения выполнено с возможностью обнаружения информации о движении в соответствии с пользовательским оперированием в отношении пространства обнаружения координат, а преобразователь выполнен с возможностью преобразования, посредством осуществления вычисления по формулам
x'=-y,
y'=-x,
при этом информация о движении, обнаруживаемая системой координат устройства обнаружения координат, обозначена как (x, y) и информация о движении в системе координат пространства обнаружения координат, при просмотре со стороны второй поверхности, обозначена как (x', y').
(13) Устройство оперирования по п.(12), в котором
первый модуль ввода оперирования, кроме устройства обнаружения, включает в себя одну или более кнопок оперирования, при этом устройство оперирования, дополнительно, содержит:
модуль управления, выполненный с возможностью перевода обнаружения оперирования модулем кнопок оперирования в состояние остановки, при определении положения.
(14) Устройство оперирования по пп.(12) или (13), в котором модуль определения выполнен с возможностью установки определения положения в состояние остановки, при выводе информации от устройства обнаружения.
(15) Устройство оперирования по любому из пп.(12)-(14), в котором модуль управления выполнен с возможностью установки определения положения в состояние остановки, при осуществлении оперирования посредством второго модуля оперирования.
(16) Устройство оперирования по любому из пп.(12)-(15), в котором модуль определения включает в себя модуль получения изображения, выполненный с возможностью съемки изображения перед любой из первой поверхности и второй поверхности; при этом
модуль определения выполнен с возможностью определения положения, дополнительно, посредством изображения, снятого модулем получения изображения.
(17) Устройство оперирования по п.(1), в котором
устройство обнаружения выполнено с возможностью обнаружения информации о движении в соответствии с операцией пользователя в отношении пространства обнаружения координат, а преобразователь выполнен с возможностью преобразования, посредством осуществления вычисления по формулам
x'=-y,
y'=-x,
при этом информация о движении, обнаруживаемая системой координат устройства обнаружения координат, обозначена, как (x, y), и информация о движении в системе координат пространства обнаружения координат, при просмотре со стороны второй поверхности, обозначена, как (x', y').
(18) Устройство оперирования по п.(17), в котором
первый модуль ввода оперирования, кроме устройства обнаружения, включает в себя одну или более кнопок оперирования, при этом устройство обнаружения, дополнительно, содержит:
модуль управления, выполненный с возможностью перевода обнаружения оперирования с модулем кнопок оперирования в состояние остановки, при определении положения.
(19) Устройство оперирования по п.(17) или (18), в котором модуль определения выполнен с возможностью установки определения положения в состояние остановки, при выводе информации от устройства обнаружения.
(20) Устройство оперирования по любому из (17) или (19), в котором модуль управления выполнен с возможностью установки определения положения в состояние остановки, при осуществлении оперирования вторым модулем ввода оперирования.
(21) Устройство оперирования по любому из (17)-(20), в котором модуль определения включает в себя модуль получения изображения, выполненный с возможностью съемки изображения перед любой из первой поверхностью и второй поверхностью; а
модуль управления выполнен с возможностью определения положения, дополнительно, посредством изображения, снятого модулем получения изображения.
Следует отметить, что настоящая технология не ограничена описанным выше вариантом осуществления и может быть по-разному модифицирована в пределах диапазона технической концепции настоящей технологии.
Описание номеров ссылочных позиций
31 - поверхность пульта дистанционного управления
32 - поверхность клавиатуры
33 - кожух
34 - сенсорная панель
34S - пространство обнаружения координат
35 - кнопка курсора
38 - клавиатура
100 - система обработки информации
200 - устройство обработки информации
201 - CPU
300 - устройство оперирования
301 - модуль управления
304 - датчик ускорения
305 - матрица кнопок поверхности пульта дистанционного управления
306 - матрица кнопок боковой поверхности
307 - матрица кнопок поверхности клавиатуры
Устройство дисплея, способ обработки сигнала изображения и программа
Приемное устройство, способ приема, программа и приемная система
Лекарственное средство с замедленным высвобождением, адсорбент, функциональный пищевой продукт, маска и поглощающий слой
Устройство для передачи волны через диэлектрик, способ изготовления устройства и способ передачи волны миллиметрового диапазона через диэлектрик
Система и способ для эффективной передачи пакетов содержания в электронные устройства
Система топливного элемента и электронное устройство
Адсорбент, моющее средство, лекарственное средство при почечной недостаточности и функциональное питание
Устройство обработки информации, диск, способ обработки информации и программа
Система и способ для упрощения передачи контента между клиентскими устройствами в электронной сети
Неводный электролитический раствор, содержащий ионы магния, и электрохимическое устройство с использованием этого раствора
Устройство дисплея, способ обработки сигнала изображения и программа
Топливный элемент и способ изготовления топливного элемента
Приемное устройство, способ приема, программа и приемная система
Лекарственное средство с замедленным высвобождением, адсорбент, функциональный пищевой продукт, маска и поглощающий слой
Модуль камеры
Устройство для передачи волны через диэлектрик, способ изготовления устройства и способ передачи волны миллиметрового диапазона через диэлектрик
Система и способ для эффективной передачи пакетов содержания в электронные устройства
Система топливного элемента и электронное устройство
Адсорбент, моющее средство, лекарственное средство при почечной недостаточности и функциональное питание
Устройство обработки информации, диск, способ обработки информации и программа

