Результат интеллектуальной деятельности: ДИСПЛЕЙ УПРАВЛЕНИЯ СКОРОСТЬЮ САМОЛЕТА
Вид РИД
Изобретение
Уровень техники
Настоящее изобретение относится к системам и способам для отображения полетной информации, представляющей отклонение от указанной четырехмерной траектории полета. В частности, но не исключительно, изобретение относится к кабинному дисплею, предоставляющему возможность пилотам достичь конкретного местоположения в конкретное время и добиться необходимых изменений скорости самолета для достижения предпочтительной путевой скорости.
Траектории полета обычно вычисляются в трех измерениях, то есть в единицах долготы, широты и абсолютной высоты. Ожидается, что будущие системы управления воздушным движением будут указывать еще одно измерение в траекториях полета, именуемое временем. Другими словами, такие системы управления воздушным движением будут не только предоставлять траекторию, которой самолет должен придерживаться, но будут также указывать время, когда самолет должен находиться в каждом положении на траектории. Это предоставит возможность службе управления воздушным движением ослабить требование к эшелонированию и тем самым предоставит возможность более эффективного использования воздушного пространства.
Обычные кабинные дисплеи показывают только абсолютную воздушную скорость, целевую абсолютную воздушную скорость и стрелку тренда воздушной скорости. Последнее показывает расчетную скорость самолета через установленный период времени (в основном от шести до десяти секунд) в зависимости от текущего темпа изменения воздушной скорости. Такие кабинные дисплеи подходят для используемых в настоящее время систем управления воздушным движением, которые могут выдавать команды абсолютной скорости в виде целевых воздушных скоростей. Однако они не обеспечивают летный экипаж информацией, которая имеет непосредственное отношение к задаче точного следования четырехмерной траектории полета.
Измерения воздушной скорости непосредственно не сопоставляются со значениями путевых скоростей, поскольку воздушная скорость измеряется относительно массы воздуха, через которую самолет проходит. Эта масса воздуха может сама перемещаться относительно земли. Движение массы воздуха характеризуется скоростью и направлением ветра, которые могут изменяться со временем. Следовательно, путевая скорость равна значению суммы вектора, определяющего воздушную скорость самолета, и вектора, определяющего скорость ветра. В основном, вертикальное направление не принимается во внимание в этом сопоставлении, поскольку оно оказывает незначительное влияние. Учитывая время, изменяющее зависимость воздушной скорости относительно путевой скорости, дисплей воздушной скорости не пригоден для летных экипажей, стремящихся точно следовать четырехмерной траектории полета.
Сущность изобретения
По одному варианту осуществляется способ отображения полетной информации, относящейся к заданной траектории полета. Заданная траектория полета указывает местоположения и соответствующие плановые значения времени. Способ включает в себя отслеживание текущего местоположения самолета на заданной траектории полета. Способ включает в себя определение текущего времени, когда самолет находится в текущем местоположении. Способ включает в себя предоставление планового времени нахождения самолета в текущем местоположении. Способ включает в себя вычисление временного отклонения между текущим и плановым временем. Способ включает в себя отображение временного отклонения.
По другому варианту выполнения система для отображения полетной информации включает в себя устройство хранения траектории полета, предназначенное для хранения данных, относящихся к заданной траектории полета, которая указывает местоположения на траектории полета и соответствующие плановые значения времени. Система включает в себя блок определения местоположения, предназначенный для выдачи данных местоположения, характеризующих текущее местоположение самолета на заданной траектории полета. Система включает в себя блок таймера, предназначенный для выдачи временных данных, характеризующих текущее время, когда самолет находится в текущем местоположении. Система включает в себя процессор, предназначенный для приема данных местоположения и временных данных, чтобы определить плановое время из плановых значений времени, хранящихся в памяти для траектории полета, соответствующих текущему местоположению, и вычисления временного отклонения между текущим и плановым временем. Система включает в себя дисплей, предназначенный для отображения временного отклонения.
В другом варианте выполнения описывается схема представления полетной информации на дисплее, включающая: шкалу временного отклонения, имеющую нулевую отметку и участки, продолжающиеся в обе стороны от нулевой отметки для представления положительных и отрицательных значений временного отклонения; указатель временного отклонения, чтобы указывать точку на шкале временного отклонения, которая показывает значение временного отклонения; шкалу путевой скорости, имеющую нулевую отметку и участки, продолжающиеся в обе стороны от нулевой отметки для представления положительных и отрицательных значений отклонения путевой скорости; и указатель отклонения путевой скорости, чтобы указывать точку на шкале путевой скорости, которая показывает значение отклонения путевой скорости. В одном варианте нулевая отметка шкалы путевой скорости изменяется с указанным значением временного отклонения.
Определенное преимущество обеспечивается тем, что такие способы и системы могут показывать полетную информацию, которая непосредственно представляет отклонения от указанной четырехмерной траектории непрерывно и в реальном времени, и могут тем самым предоставлять возможность летному экипажу легко изменять положение самолета в направлении движения, чтобы следовать четырехмерной траектории с более высокой точностью.
В равной степени эти способы и системы могут быть применены к траектории, для которой абсолютная высота не указана, то есть где указаны только широта, долгота и время. Соответственно, пока в вариантах выполнения, указанных ниже, используют четырехмерную траекторию, изобретение охватывает отображение временного отклонения относительно траектории, указанной в двух (латеральных) измерениях. Другими словами, указанные местоположения на траектории полета могут быть выражены либо в трехмерной системе координат, либо в двухмерной системе координат.
Краткое описание чертежей
Для лучшего понимания изобретения и чтобы показать, как это можно осуществить, дается ссылка, только в качестве примера, на прилагаемые чертежи:
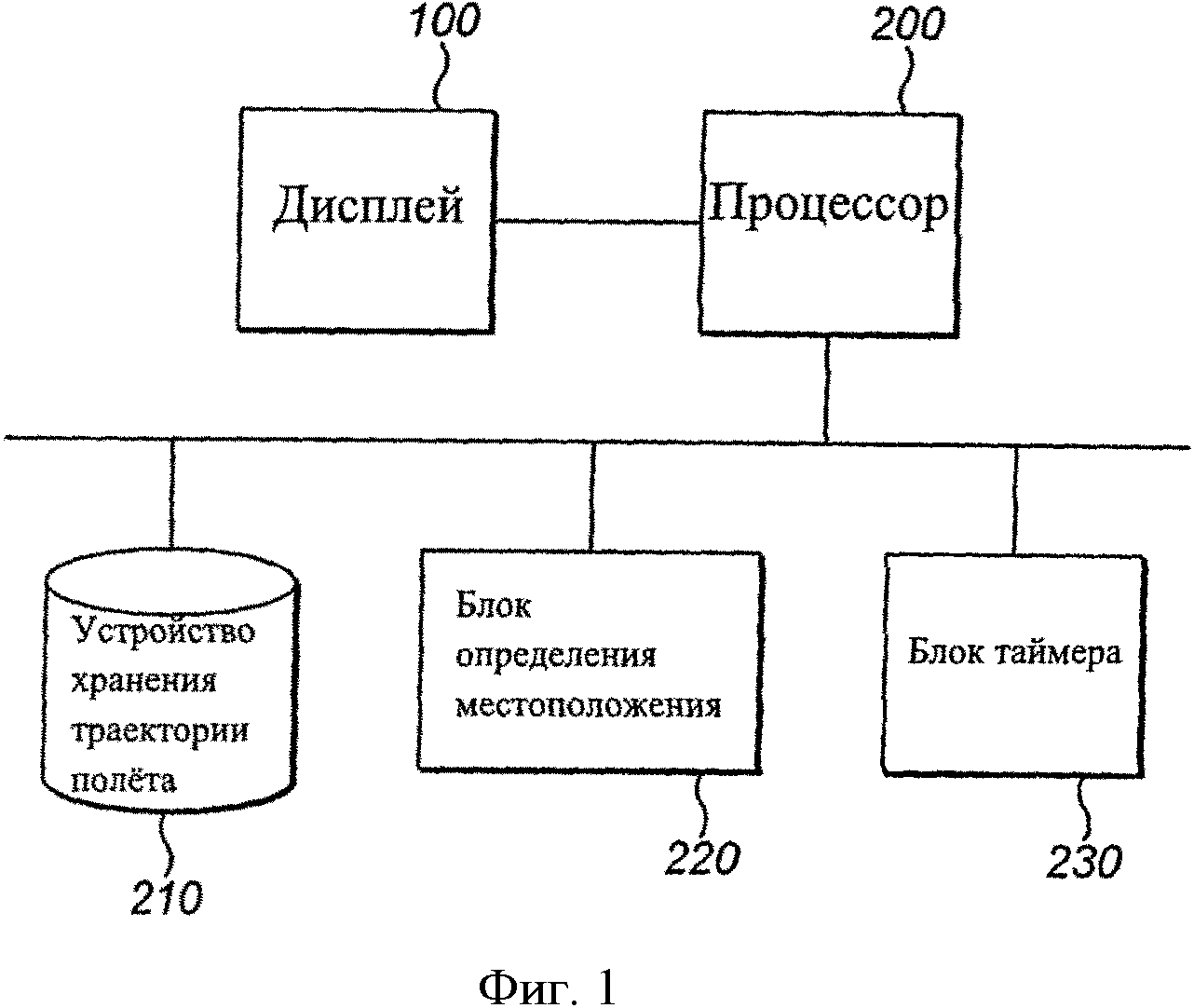
Фиг.1 - схематический вид первого варианта выполнения системы для отображения полетной информации;
Фиг.2 - нелинейный дисплей, образующий часть первого варианта выполнения;
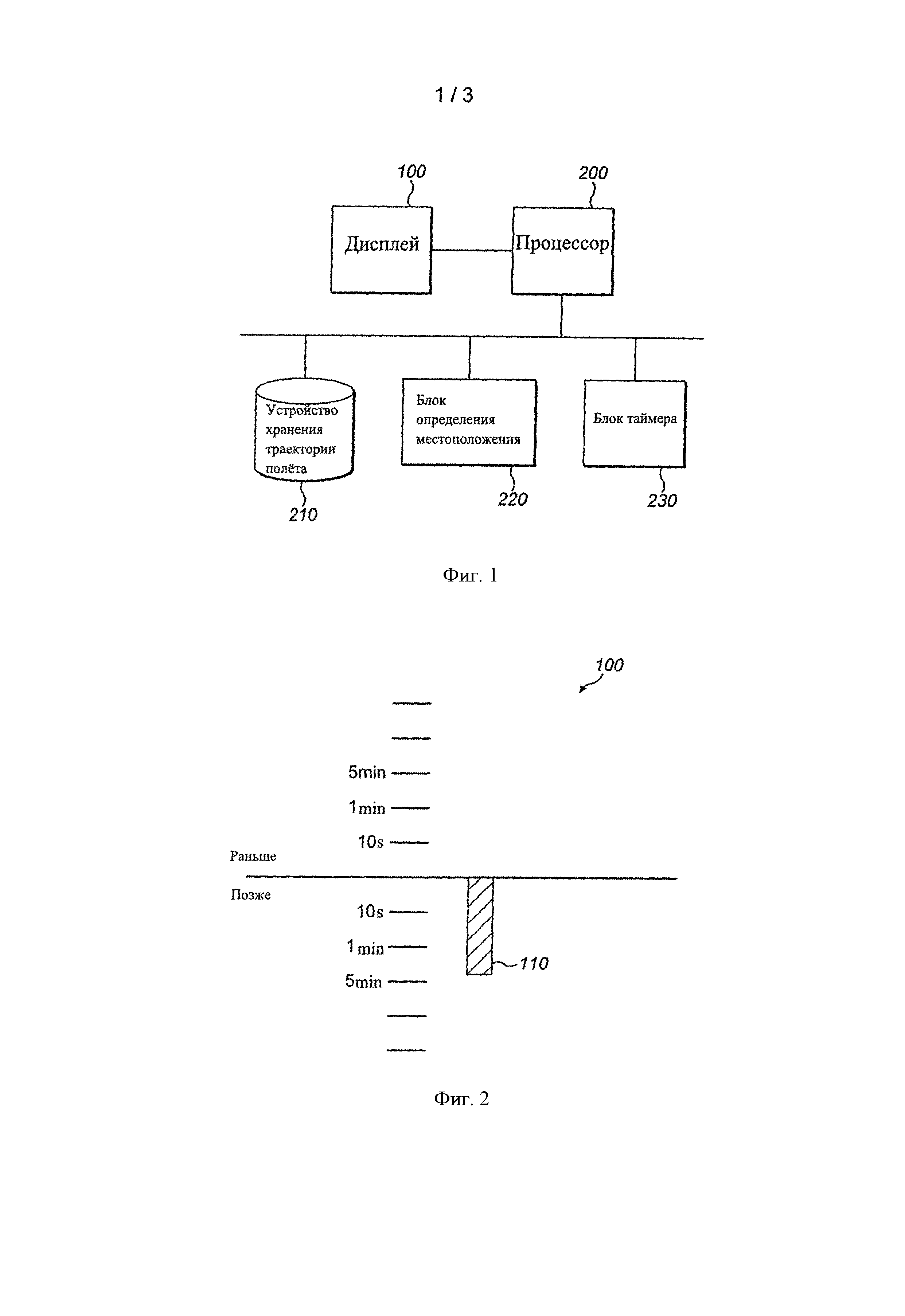
Фиг.3 - схематический вид второго варианта выполнения системы для отображения
полетной информации;
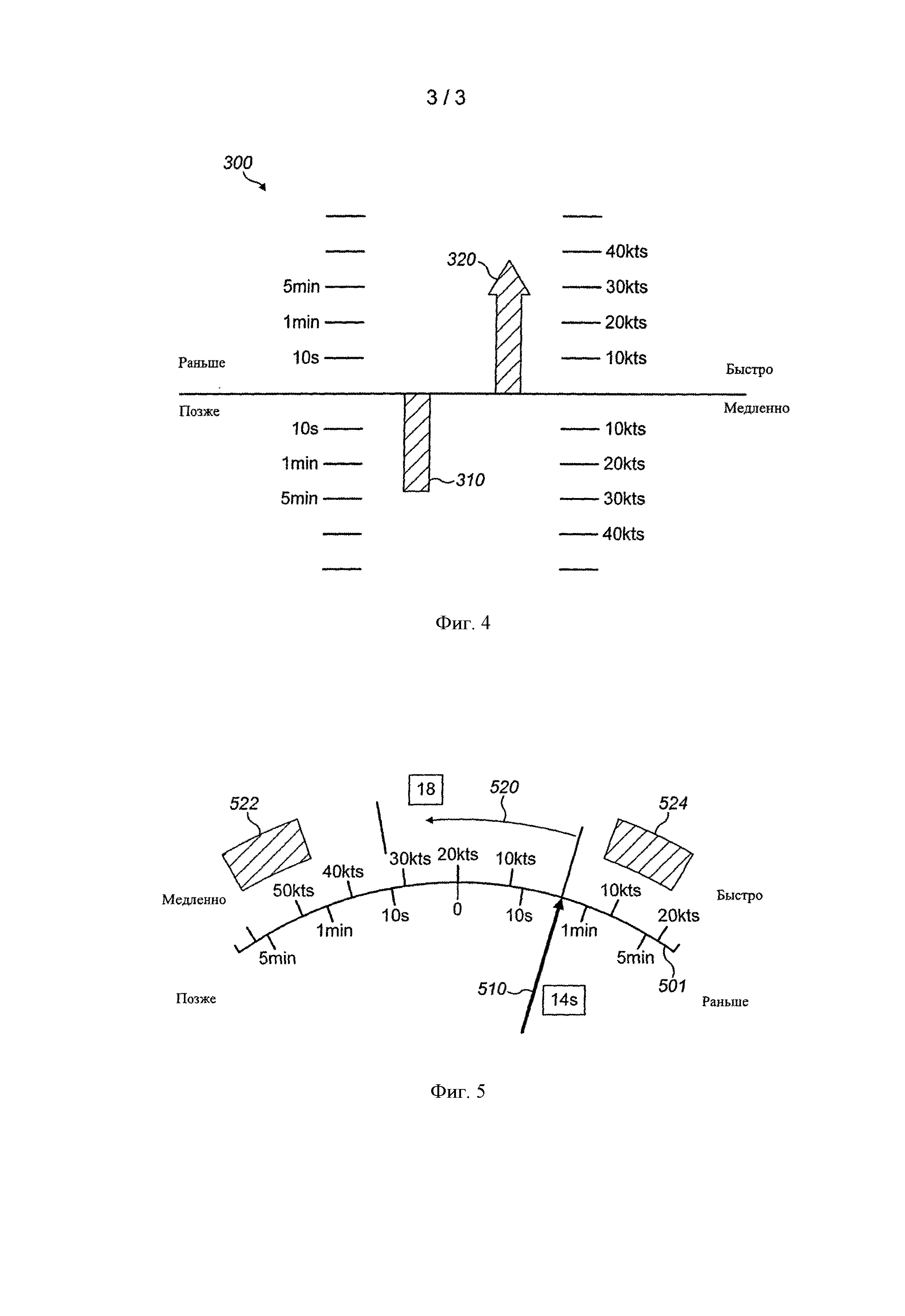
Фиг.4 - комбинированный линейный и нелинейный дисплей, образующий часть второго варианта выполнения;
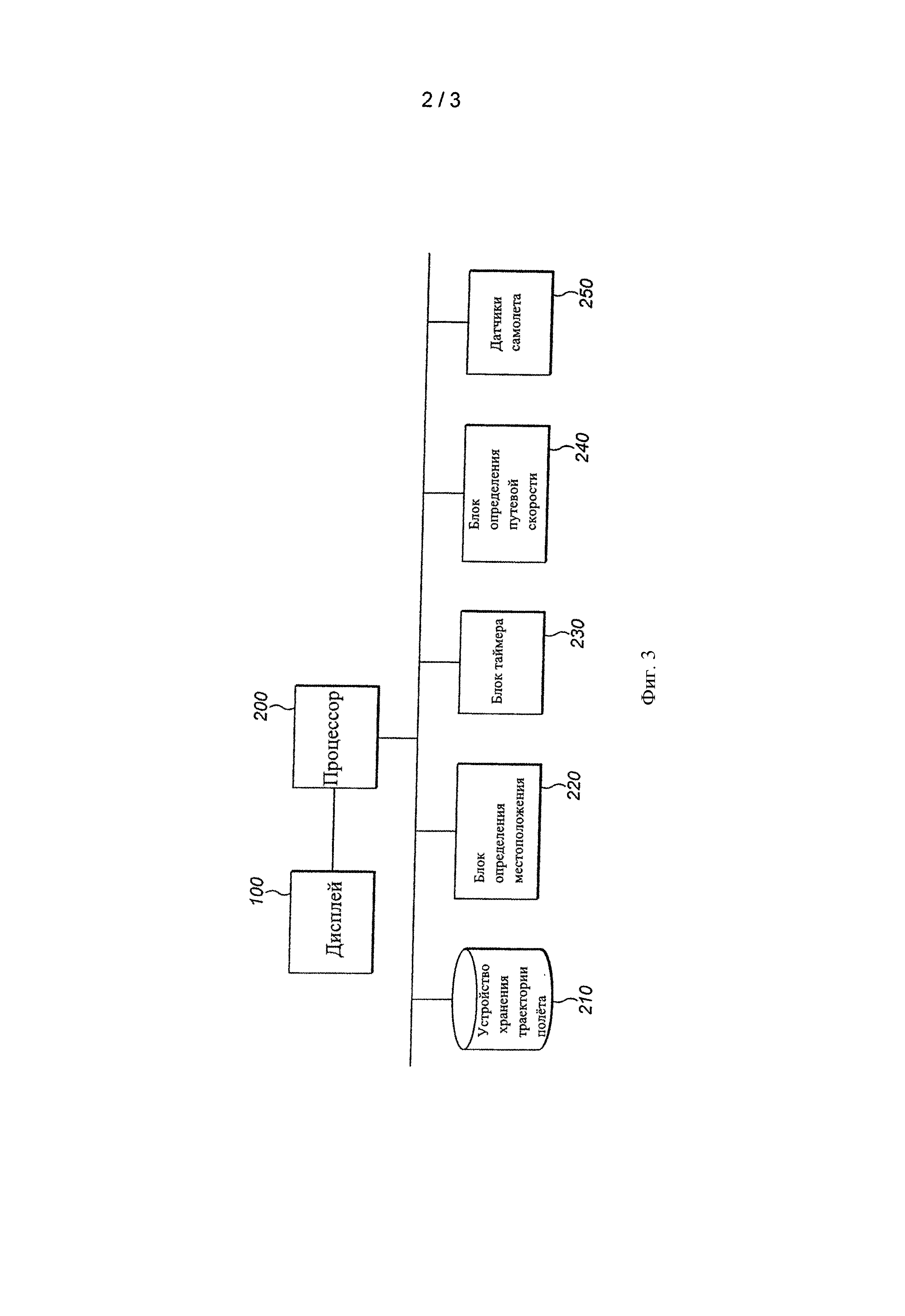
Фиг.5 - показана альтернативная схема представления полетной информации на комбинированном линейном и нелинейном дисплее, образующем вариант выполнения изобретения.
Подробное описание
Приводимое описание представляет собой иллюстрации вариантов выполнения изобретения. В одном или более из этих вариантов выполнения представлены иллюстрации одного или более элементов, рассматриваемых далее. Например, устройство хранения траектории полета может быть памятью любого вида, включая как энергозависимый (например ОЗУ), так и энергонезависимый (например жесткий диск). Более того, устройство хранения траектории полета может хранить либо всю заданную траекторию полета, либо один или более из ее участков. В различных вариантах выполнения данные траектории полета могут передаваться в самолет в реальном времени для записи в устройство хранения траектории полета, и в этом случае устройство хранения траектории полета может быть простым буфером. Записанные данные траектории полета могут включать в себя плановые путевые скорости, соответствующие местоположениям на траектории полета. Альтернативно плановые путевые скорости могут быть получены из данных траектории полета, относящихся к плановым значениям времени и местоположения на траектории полета. Например, скорость изменения местоположения, соответствующего плановым значениям времени, может быть вычислена и применена в качестве плановой путевой скорости.
Блок определения местоположения может быть на борту самолета или на земле. В последнем случае текущее местоположение передавалось бы на самолет с использованием подходящего средства передачи данных.
Когда средство определения местоположения расположено на самолете, оно может содержать GPS-приемник или какое-то другое радионавигационное устройство. Если необходимо, абсолютная высота самолета может быть определена с использованием такого GPS-приемника или, более предпочтительно, комплектующих, таких как барометрические высотомеры и т.д. В вариантах выполнения, в которых средство определения местоположения расположено на земле, оно может содержать радиолокационную систему. Блок таймера может представлять собой часы или приемник сигнала времени, например от GPS-приемника. Процессор может представлять собой компонент компьютера общего назначения или встроенный компонент специализированного индикаторного устройства.
В первом варианте выполнения изобретения, как показано на фиг.1, самолет содержит дисплей 100, процессор 200, устройство 210 хранения траектории полета, блок 220 определения местоположения и блок 230 таймера. Как изображено на фиг.2, дисплей 100 предназначен для показа временного отклонения 110. Дисплей 100 может дополнительно показывать другие данные, которые обычно показываются в кабине самолета, такие как абсолютная воздушная скорость.
Устройство 210 хранения траектории полета хранит данные, относящиеся к заданной траектории полета, которой должен следовать самолет. Такие данные могут генерироваться системой управления полетом самолета или могут быть предложены службой Управления воздушным движением, ответственной за воздушное пространство, через которое самолет проходит. Данные траектории полета представляют дискретные точки на заданной траектории, указывающие местоположения, через которые самолет должен пройти, вместе с графиком времени, указывающим плановые значения времени, когда самолет должен пройти через каждое местоположение. Предпочтительно, чтобы данные траектории полета были в виде списка соответствующих значений широты, долготы, абсолютной высоты и времени. Однако нет необходимости указывать в данных траектории полета плановое значение времени для каждого местоположения, и, следовательно, список значений времени может быть при необходимости редко заполненным. Где это необходимо, процессор 200 может интерполировать данные между точками, чтобы оценить промежуточные значения и тем самым создать впечатление непрерывных данных. Альтернативно или в дополнение процессор 200 может использовать более усложненные модели поведения самолета для указания промежуточных точек.
Блок 220 определения местоположения предназначен для предоставления данных местоположения, представляющих местоположение самолета в трех измерениях, предпочтительно в виде значений широты, долготы, абсолютной высоты. Подходящие устройства для определения местоположения самолета в трех измерениях хорошо известны в данной области техники и включают в себя: инерционные навигационные системы, GPS, радиолокатор, барометрические высотомеры и т.д. или их комбинацию. Процессор 200 предназначен для получения данных местоположения из блока 220 определения местоположения и данных траектории полета из устройства 210 хранения траектории полета. Процессор 200 тем самым определяет, где на заданной траектории полета расположен самолет в данное время (Если положение самолета отклоняется от заданной траектории полета, ближайшее местоположение на этой траектории может быть использовано для способа, описанного ниже по тексту).
Блок 230 таймера предназначен для предоставления текущих временных данных, представляющих текущее время. Блок 230 таймера может содержать часы или же может определить время посредством связи с внешними часами, например с часами GPS. Процессор 200 имеет дополнительную функцию получения текущих временных данных из блока 230 таймера. Процессор 200 сравнивает текущее значение времени с плановой временной составляющей данных траектории полета и тем самым определяет временное отклонение 110. Временное отклонение 110, таким образом, представляет разность между текущим временем и плановым значением времени, сохраненным в данных траектории полета, соответствующих текущему местоположению самолета на заданной траектории полета.
Дисплей 100 отображает временное отклонение 110, определенное процессором 200. Дисплей 100 может отображать временное отклонение 110 посредством представления значения в виде цифровых знаков и/или посредством графика. В случае графического представления временное отклонение 110 может быть представлено на линейной шкале или, как показано на фиг.1, на нелинейной шкале. Определенное преимущество обеспечивается тем, что нелинейная шкала может показывать малые значения временного отклонения 110 с более высокой точностью, чем большие значения временного отклонения 110. Во время полета, летный экипаж может отслеживать временное отклонение 110, чтобы установить для своего текущего , опережают ли они график или отстают от него. Таким образом, он имеет возможность делать необходимые корректировки скорости самолета, чтобы уменьшить временное отклонение 110 и тем самым более точно следовать заданной траектории полета. Ясно, что летный экипаж может затем повлиять на воздушную скорость соответствующим образом и использовать описанный дисплей, чтобы отслеживать результат изменения путевой скорости. Воздушная скорость может быть скорректирована посредством управления тягой, обеспечиваемой двигателями самолета, или регулировкой управляющих поверхностей самолета и конфигурации.
Во втором варианте выполнения изобретения, как показано на фиг.3, в дополнение к компонентам первого варианта выполнения, самолет содержит блок 240 определения путевой скорости. Хотя дисплей первого варианта выполнения предоставляет возможность летному экипажу увеличивать или уменьшать скорость самолета, чтобы минимизировать временное отклонение 110, когда заданная четырехмерная траектория полета содержит изменение скорости (например при взлете или посадке самолета), временное отклонение 110 будет соответственно увеличиваться или уменьшаться. Для того чтобы летный экипаж мог точнее продвигаться по заданной траектории полета, дисплей второго варианта выполнения также показывает отклонение между путевой скоростью самолета и плановой путевой скоростью.
Как изображено на фиг.4, дисплей 300 показывает отклонение 320 путевой скорости и может при необходимости также показывать одну или более величину из: временного отклонения 310; максимально допустимого отклонения 322 путевой скорости и минимально допустимого отклонения 324 путевой скорости (следует понимать, что отклонение путевой скорости может представлять собой отрицательное значение - минимальное отклонение путевой скорости, следовательно, соответствует наибольшей допустимой величине отклонения в отрицательном направлении). Кроме того, необязательными величинами для отображения являются: текущая путевая скорость, максимально допустимая путевая скорость и минимально допустимая путевая скорость.
Любая из этих величин может отображаться посредством линейной или нелинейной шкалы. Действительно, как показано на фиг.4, временное отклонение 310 отображается на нелинейной шкале, в то время как отклонение 320 путевой скорости отображается на линейной шкале.
В дополнение к компонентам, изложенным выше по тексту в первом варианте выполнения, данные траектории полета второго варианта выполнения могут включать в себя значения путевой скорости, указывающие плановую путевую скорость, при которой самолет должен пройти через каждое местоположение на заданной траектории полета. Альтернативно плановая путевая скорость может быть определена из данных траектории полета, например дифференцированием. Данные траектории полета второго варианта выполнения представлены в виде списка значений соответствующей широты, долготы, абсолютной высоты, времени и путевой скорости. Опять же, нет необходимости указывать в данных траектории полета значение плановой путевой скорости для каждого местоположения, и, следовательно, список значений путевой скорости может быть редко заполненным.
Блок определения путевой скорости 240 предназначен для предоставления данных путевой скорости, представляющих путевую скорость самолета. Альтернативно путевая скорость самолета может быть определена процессором 200 путем вычисления скорости изменения местоположения земли, исходя из местоположения, определенного блоком 220 определения местоположения, и времени от таймера 230. Процессор 200 предназначен для получения данных путевой скорости из блока 240 определения путевой скорости и данных траектории полета из устройства 210 хранения траектории полета. Процессор 200 сравнивает данные путевой скорости с плановой путевой скоростью, являющуюся компонентом данных траектории полета (или с плановой путевой скоростью, определенной из данных траектории полета), и тем самым определяет отклонение 320 путевой скорости. Отклонение 320 путевой скорости, таким образом, представляет разность между текущей путевой скоростью и плановой путевой скоростью, сохраненной в данных траектории полета, соответствующих текущему местоположению самолета на заданной траектории полета, что определено процессором 200. Дисплей 100 показывает временное отклонение 110, определенное процессором 200. Дисплей 100 может показывать отклонение путевой скорости 320 посредством представления значения в виде цифровых знаков и/или посредством графика. Предпочтительно, чтобы дисплей 300 мог показывать текущую полетную скорость самолета, максимально допустимую путевую скорость и минимально допустимую путевую скорость.
Во время полета летный экипаж может отслеживать отклонение 320 путевой скорости, чтобы установить, продвигаются ли они слишком быстро или слишком медленно, для того чтобы сохранять правильное четырехмерное местоположение. Если дисплей 300 показывает временное отклонение 310, указывающее, что самолет отстает от графика, летный экипаж может увеличить тягу самолета так, чтобы отклонение 320 путевой скорости показывало, что самолет движется быстрее своей запланированной скорости.
Таким образом, при увеличении тяги настолько, чтобы отклонение 320 путевой скорости стало положительным, временное отклонение 310 начнет уменьшаться. И наоборот, при уменьшении тяги настолько, чтобы отклонение 320 путевой скорости стало отрицательным, временное отклонение 310 начнет увеличиваться. Другими словами, отслеживанием как временного отклонения 110, так и отклонения 320 путевой скорости, летный экипаж имеет возможность делать необходимые корректировки тяги самолета, управляющих поверхностей или конфигурации, чтобы точнее следовать заданной четырехмерной траектории полета.
Как описано выше по тексту, дисплей 300 может дополнительно показывать максимально допустимую путевую скорость и минимально допустимую путевую скорость. В таком варианте выполнения самолет содержит авиационные датчики 250 для измерения воздушной скорости и курса. Предпочтительно, чтобы авиационный датчик, который измеряет воздушную скорость, представлял собой трубку Пито. Предпочтительно, чтобы в температурном датчике также была обеспечена возможность компенсации изменения плотности воздуха посредством известных способов. Таким образом, в данном контексте измеренная воздушная скорость может означать "истинную воздушную скорость". Авиационный датчик, измеряющий курс, может представлять собой электронный компас, гирокомпас или более сложную инерциальную навигационную систему.
Самолет может изменять конфигурацию, например, движением закрылков или предкрылков. Для каждой конфигурации самолет имеет соответствующую максимальную воздушную скорость, определяющую наибольшую скорость относительно массы воздуха, через которую он проходит, при которой самолет может двигаться безопасно - например, более высокие скорости могут вызвать повреждение конструкции и/или привести к неблагоприятным аэродинамическим эффектам, таким как вибрация, или не дать самолету эффективно маневрировать. Фраза «максимальная воздушная скорость самолета» здесь и далее по тексту означает максимальную воздушную скорость, соответствующую конфигурации самолета в настоящий момент времени. Эта величина изменяется по отношению к путевой скорости в зависимости от скорости и направления ветра. По соображениям безопасности часто бывает предпочтительно определять максимально допустимую воздушную скорость как фактическую максимальную воздушную скорость, уменьшенную посредством соответствующего коэффициента безопасности. Максимально допустимая путевая скорость 322 может быть определена как значение суммы вектора, характеризующего максимально допустимую воздушную скорость самолета, и вектора, характеризующего скорость ветра. Скорость ветра и направление может быть вычислена обычным путем, сравнением измеренной воздушной скорости и курса (ориентации фюзеляжа самолета) с измеренной путевой скоростью и линией пути (направлением, в котором самолет движется). Линия пути может быть определена при помощи данных местоположения из блока 220 определения местоположения. Как очевидно специалистам, определение скорости ветра и направления не является необходимым промежуточным этапом при вычислении максимально допустимой путевой скорости, которая может быть определена непосредственно из воздушной скорости и курса, путевой скорости и линии пути и максимально допустимых воздушных скоростей. Действительно, максимально допустимая путевая скорость может быть вычислена как значение суммы вектора, характеризующего максимально допустимую воздушную скорость самолета и вектора, характеризующего путевую скорость минус вектор, характеризующий воздушную скорость. В предпочтительных вариантах выполнения изобретения на дисплее 300 будет показана максимально допустимая путевая скорость. Для каждой конфигурации самолет будет также иметь соответствующую минимальную воздушную скорость маневрирования, определяющую наименьшую скорость относительно массы воздуха, через которую самолет проходит, при которой самолет может маневрировать безопасно без сваливания. Фраза «минимальная воздушная скорость маневрирования самолета» здесь и далее по тексту означает минимальную воздушную скорость маневрирования, соответствующую конфигурации самолета в настоящий момент времени. Путевая скорость, связанная с минимальной воздушной скоростью маневрирования для каждой конфигурации, будет изменяться в зависимости от скорости и направления ветра. По соображениям безопасности часто бывает предпочтительно определять минимально допустимую воздушную скорость как фактическую минимальную воздушную скорость, увеличенную посредством соответствующего коэффициента безопасности. Минимально допустимая путевая скорость может быть определена как значение суммы вектора, характеризующего минимально допустимую воздушную скорость маневрирования самолета и вектора, характеризующего скорость ветра.
Как указано выше, определение скорости ветра и направления не является необходимым промежуточным этапом при вычислении минимально допустимой путевой скорости, которая может быть определена непосредственно из воздушной скорости и курса, путевой скорости и линии пути и минимально допустимых воздушных скоростей. Например, минимально допустимая путевая скорость может быть вычислена как значение суммы вектора, характеризующего минимально допустимую воздушную скорость самолета, и вектора, характеризующего путевую скорость, минус вектор, характеризующий воздушную скорость. В предпочтительных вариантах выполнения изобретения на дисплее 300 обычно показывается минимально допустимая путевая скорость. В других предпочтительных вариантах выполнения на дисплее могут отображаться максимально допустимое отклонение 322 путевой скорости и минимально допустимое отклонение 324 путевой скорости. Это значит, что величины максимально допустимой путевой скорости и минимально допустимой путевой скорости могут отображаться относительно текущей путевой скорости. Тем самым могут быть указаны верхняя и нижняя границы для отклонения 320 путевой скорости. Во время полета летный экипаж может тем самым сравнивать отклонение 320 путевой скорости с максимально и минимально допустимыми отклонениями 322, 324 путевой скорости для обеспечения работы самолета в безопасных пределах.
Как отмечалось выше, может также отображаться отклонение от плановой путевой скорости. Некоторые системы управления полетом (или Управления воздушным сообщением) могут подавать команды, когда самолет опережает график или отстает от него, для того чтобы "захватить" определенное рекомендуемое положение на линии пути. Команды могут быть в виде рекомендуемой путевой скорости. В предпочтительных вариантах выполнения, команда может представлять собой рекомендуемую путевую скорость, которая предоставит возможность самолету достичь рекомендуемого положения на линии пути в момент времени, запланированный для этого местоположения. Таким образом, система управления полетом (или Управления воздушным сообщением) может подавать самолету команды для "захвата", указывая в них плановую линию пути в пределах рекомендуемого промежутка времени или время, когда самолет достигнет рекомендуемого местоположения. Система может определить отклонение между текущей путевой скоростью и командной путевой скоростью, для того чтобы вычислить отклонение командной путевой скорости. В предпочтительных вариантах выполнения отклонение командной путевой скорости может отображаться вместо или в дополнение к отклонению путевой скорости 320, вычисленного сравнением текущих и плановых путевых скоростей.
На фиг.5 изображена схема представления полетной информации летному экипажу. Как видно из фиг.5, дисплей представлен координатной осью, выполненной в виде дуги 501 окружности, а не в прямолинейном виде, показанном на фиг.2 и 4. Деления, расположенные под дугой 501, графически представляют дискретные значения временного отклонения на непрерывной оси. Деления, расположенные над дугой 501, графически представляют дискретные значения отклонения путевой скорости на непрерывной оси.
Временное отклонение 510 и/или отклонение 520 путевой скорости могут быть представлены на линейной или нелинейной шкале. Определенное преимущество обеспечивается тем, что нелинейная шкала может показывать малые значения временного отклонения 510 и/или отклонения 520 путевой скорости с более высокой точностью, чем большие значения. В предпочтительном варианте выполнения по фиг.5 временное отклонение 510 отображается на нелинейной шкале, в то время как отклонение 520 путевой скорости отображается на линейной шкале.
Как показано на фиг.5, отклонение 520 путевой скорости (и при необходимости максимально допустимое отклонение 522 путевой скорости и минимально допустимое отклонение 524 путевой скорости) изображено на шкале, которая перемещается вместе с отображаемым значением временного отклонения. Другими словами, нулевая отметка на оси отклонения путевой скорости соответствует стрелке, изображающей временное отклонение 510. Следовательно, дисплей может представлять отклонение 520 путевой скорости таким образом, что его влияние на значение временного отклонения можно легко понять: если отклонение 520 путевой скорости сместится влево, то стрелка временного отклонения сдвинется влево, если же оно сместится вправо, то стрелка временного отклонения сдвинется вправо. Такая подвижная нулевая отметка дисплея может также использоваться с линейной формой схемы представления, показанной на фиг.2 и 4. Соответственно, предпочтительный вариант выполнения схемы представления полетной информации, содержит:
шкалу временного отклонения, имеющую нулевую отметку и участки, продолжающиеся в обе стороны от нулевой отметки для представления положительных и отрицательных значений временного отклонения;
указатель временного отклонения, указывающий точку на шкале временного отклонения, которая показывает значение временного отклонения;
шкалу отклонения путевой скорости, имеющей нулевую отметку и участки, продолжающиеся в обе стороны от нулевой отметки для представления положительных и отрицательных значений отклонения путевой скорости;
указатель отклонения путевой скорости, указывающий точку на шкале отклонения путевой скорости, которая показывает значение отклонения путевой скорости, в котором нулевая отметка шкалы отклонения путевой скорости изменяется с указанным значением временного отклонения.
При необходимости схема представления может также содержать указатель максимально допустимого отклонения путевой скорости, указывающий точку на шкале отклонения путевой скорости, которая показывает максимально допустимое значение отклонения путевой скорости.
При необходимости схема представления может также содержать указатель минимально допустимого отклонения путевой скорости, указывающий точку на шкале отклонения путевой скорости, которая показывает минимально допустимое значение отклонения путевой скорости. Более того, предпочтительные варианты выполнения могут включать в себя указатель путевой скорости, показывающий текущую путевую скорость. Такой указатель мог бы быть обеспечен отдельной шкалой путевой скорости или мог бы показывать местоположение на шкале отклонения путевой скорости, поскольку она представляет 15 соответствующих единиц и, следовательно, могла бы также рассматриваться в качестве шкалы путевой скорости.
При необходимости, схема представления может также содержать указатель максимально допустимой путевой скорости, указывающий точку на шкале путевой скорости, которая показывает максимально допустимое значение путевой скорости.
При необходимости, схема представления может также содержать указатель минимально допустимой путевой скорости, указывающий точку на шкале путевой скорости, которая показывает минимально допустимое значение путевой скорости.
В чертежах и тексте описывается способ отображения полетной информации, относящийся к заданной траектории полета, которая указывает местоположения и плановые значения времени, соответствующие ей, причем способ содержит этапы: отслеживания текущего местоположения самолета на заданной траектории полета; определения текущего времени, когда самолет находится в текущем местоположении; предоставления планового времени нахождения самолета в текущем местоположении; вычисления временного отклонения 110, 310 между текущим и плановым временем; и отображения временного отклонения 110, 310. В одном варианте способ включает в себя этап предоставления рекомендуемой путевой скорости для самолета в текущем местоположении. Другой вариант включает способ, в котором рекомендуемая путевая скорость является плановой путевой скоростью. В еще одном варианте выполнения способ включает в себя этапы: отслеживания текущей путевой скорости самолета; вычисления отклонения 320 путевой скорости между текущей путевой скоростью и рекомендуемой путевой скоростью; и отображение отклонения 320 путевой скорости. В еще одном варианте выполнения способ включает в себя еще один этап, отображающий рекомендуемую путевую скорость.
В одном альтернативном варианте выполнения способ дополнительно включает этапы: отслеживания текущей путевой скорости самолета, текущей воздушной скорости, текущего курса и текущей линии пути; задания максимальной эксплуатационной воздушной скорости самолета; вычисления максимально допустимого отклонения 322 путевой скорости, исходя из заданной максимальной эксплуатационной скорости, текущей воздушной скорости, текущей путевой скорости, текущего курса и текущей линии пути; и отображения максимально допустимого отклонения 322 путевой скорости. В еще одном альтернативном варианте выполнения способ дополнительно включает этапы: задания минимальной эксплуатационной воздушной скорости самолета; вычисление минимально допустимого отклонения 324 путевой скорости исходя из заданной минимальной воздушной скорости маневрирования, текущей воздушной скорости, текущей путевой скорости, текущего курса и текущей линии пути; и отображение минимально допустимого отклонения 324 путевой скорости. В одном объекте изобретения раскрыта система для отображения полетной информации, включающая устройство 210 хранения траектории полета, предназначенное для хранения данных, относящихся к заданной траектории полета, которые указывают местоположения на траектории полета и плановые значения времени, соответствующие им; блок 220 определения местоположения, предназначенный для вывода данных местоположения, характеризующих текущее местоположение самолета на заданной траектории полета; блок таймера 230, предназначенный для вывода временных данных, характеризующих текущее время, когда самолет находится в текущем местоположении; процессор 200, предназначенный для получения данных местоположения и временных данных, чтобы определить плановое время из плановых значений времени, сохраненных в памяти для записи траектории полета, соответствующее текущему местоположению, и для вычисления временного отклонения 110, 310 между текущим и плановым временем; и дисплей 100, предназначенный для отображения временного отклонения 110, 310. В одном варианте выполнения, в котором описанная система предназначена для предоставления рекомендуемой путевой скорости. Еще один вариант выполнения включает систему, в которой: устройство 210 хранения траектории полета предназначено для хранения плановых путевых скоростей, соответствующих указанным местоположениям на траектории полета, и рекомендуемая путевая скорость является плановой путевой скоростью, соответствующей текущему местоположению. Еще один вариант выполнения, в котором процессор 200 имеет дополнительную функцию вычисления плановых путевых скоростей, соответствующих указанным местоположениям на траектории полета, исходя из указанных местоположений на траектории полета и плановых значений времени, соответствующих им; и рекомендуемая путевая скорость является плановой путевой скоростью, соответствующей текущему местоположению.
В одном альтернативном варианте выполнения описана еще одна система, включающая блок 240 определения путевой скорости, предназначенный для вывода данных путевой скорости, характеризующих измеренную текущую путевую скорость самолета, в которой: в процессор 200 включена дополнительная функция получения данных путевой скорости и вычисления отклонения 320 путевой скорости между измеренной текущей путевой скоростью и рекомендуемой путевой скоростью, соответствующего текущему местоположению; и в дисплей 100 включена дополнительная функция отображения отклонения путевой скорости. В одном варианте выполнения описывается система, в которой дисплей 100 имеет дополнительную функцию отображения плановой путевой скорости.
В еще одном варианте выполнения описана система, включающая блок 240 определения путевой скорости, предназначенный для вывода данных путевой скорости, характеризующих измеренную текущую путевую скорость самолета, и данных линии пути, характеризующих измеренную линию пути самолета; и авиационный датчик 250, предназначенный для вывода данных воздушной скорости, характеризующих измеренную текущую воздушную скорость самолета, и данных курса, характеризующих измеренную текущую воздушную скорость самолета, в которой: самолет имеет заданную максимальную эксплуатационную воздушную скорость; в процессор 200 включена дополнительная функция получения данных воздушной скорости от датчиков воздушной скорости, данных путевой скорости и данных линии пути из блока 240 определения путевой скорости и данных курса от датчика курса; в процессор 200 включена дополнительная функция вычисления максимально допустимого отклонения 324 путевой скорости исходя из заданной максимальной эксплуатационной воздушной скорости, данных воздушной скорости, данных путевой скорости, данных курса и данных линии пути; и в дисплей 100 включена дополнительная функция отображения максимально допустимого отклонения 324 путевой скорости. В одном варианте выполнения описывается система, в которой: самолет имеет заданную минимальную воздушную скорость маневрирования; в процессор 200 включена дополнительная функция вычисления минимально допустимого отклонения путевой скорости 320 исходя из заданной минимальной воздушной скорости маневрирования, воздушных данных скорости, данных путевой скорости, данных курса и данных линии пути; и в дисплей 100 включена дополнительная функция для отображения минимально допустимого отклонения 320 путевой скорости. В другом объекте описана схема представления полетной информации на дисплее, включающая шкалу временного отклонения, имеющую нулевую отметку и участки, продолжающиеся в обе стороны от нее, для представления положительных и отрицательных значений временного отклонения 510; указатель временного отклонения, указывающий точку на шкале временного отклонения, которая показывает значение временного отклонения 510; шкалу отклонения путевой скорости, имеющую нулевую отметку и участки, продолжающиеся в обе стороны от нее, для представления положительных и отрицательных значений отклонения 520 путевой скорости; и указатель отклонения путевой скорости, указывающий точку на шкале отклонения путевой скорости, которая показывает значение отклонения 520 путевой скорости. Один вариант выполнения включает схему представления, в которой нулевая отметка шкалы отклонения путевой скорости изменяется с указанным значением временного отклонения 510. В другом варианте выполнения схема представления включает указатель отклонения минимально допустимой путевой скорости, чтобы указывать точку на шкале отклонения путевой скорости, которая показывает минимально допустимое значение отклонения 524 путевой скорости. В еще одном варианте выполнения описывается указатель путевой скорости для показа текущей путевой скорости, в котором указатель имеет отдельную шкалу путевой скорости или показывает местоположение на шкале отклонения путевой скорости.
В одном варианте выполнения указатель максимально допустимой путевой скорости указывает точку на шкале путевой скорости, которая показывает максимально допустимое значение путевой скорости 522. В еще одном варианте выполнения указатель минимально допустимой путевой скорости указывает точку на шкале путевой скорости, которая показывает минимально допустимое значение путевой скорости.
Вертикально встроенные элементы жесткости
Способ и устройство для формирования наклонного борта
Сотовая структура и способ ее образования
Активное полурычажное шасси
Втулки, устройства с использованием втулок и связанные с ними способы изготовления
Структура источника постоянного тока для дистанционного запуска всу
Фитинг, разгруженный от действия момента сил
Соединение для композитных крыльев
Способ отделения диоксида углерода
Лонжерон кессонного крыла и обшивка
Силовые кессонные конструкции и способы их получения
Композитный шляпообразный профиль усиления, композитные усиленные шляпообразными профилями гермоперегородки и способы их изготовления
Оптимизированная перекрестная ориентация слоев в композитных ламинатах
Разделительная штора
Система транспортировки текучей среды для предотвращения электрического разряда
Способ и система изготовления композитных конструкций с заполнителями зазора из рубленого волокна

