Результат интеллектуальной деятельности: Способ синтеза пространственного механизма
Вид РИД
Изобретение
Изобретение относится к области машиностроения и может быть использовано для синтеза пространственного механизма с трехмерным движением.
Уровень техники.
Основным назначением механизма является выполнение им требуемых движений. Эти движения могут быть описаны посредством его кинематических характеристик. К ним относят координаты точек и звеньев, их траектории, скорости и ускорения. К числу кинематических характеристик относится и функция положения F, которая не зависит от закона движения начальных звеньев, а определяется только строением механизма - геометрическими характеристиками его звеньев и возможностями вращательных, поступательных или иных движений в кинематических парах.
Все механизмы независимо от их назначения образуются из звеньев и соединений звеньев (кинематических пар). Если число подвижных звеньев обозначить параметром n, а число кинематических пар параметром p, то именно эти два параметра целиком и полностью определяют структуру механизма.
Какие бы ни были сложные по структуре механизмы, все они описываются универсальной структурной формулой В.В. Добровольского (Основные принципы рациональной классификации механизмов. В кн. Добровольский В.В., Артоболевский И.И. Структура и классификация механизмов. М. - Л.: Изд-во АН СССР, 1939. - С. 5-48):

где W - подвижность механизма, m - параметр Добровольского, означающий число общих связей, накладываемых на весь механизм в целом, k=1, 2, 3, 4, 5 - класс кинематических пар.
И.И. Артоболевским предложено различать механизмы по параметру m Добровольского на пять семейств (Опыт структурного анализа механизмов. В кн. Добровольский В.В., Артоболевский И.И. Структура и классификация механизмов. М. - Л.: Изд-во АН СССР, 1939. - С. 48-66):
нулевое (m=0)
первое (m=1)
второе (m=2)
третье (m=3)
четвертое (m=4)
К настоящему времени в большей или меньшей степени исследованными и широко используемыми в практике являются простейшие механизмы нулевого семейства (m=0), плоские и сферические механизмы третьего семейства, клиновые и винтовые механизмы четвертого семейства. Что же касается механизмов первого и второго семейств, то они фактически являются неисследованными. Синтез подобных пространственных механизмов трудоемок.
Например, из формулы Добровольского (1) следует, что кинематическая замкнутая цепь с шестью вращательными кинематическими парами (n=5, p=6, k=5) представляет в общем случае (m=0) жесткую систему (W=0). Это значит, что в общем случае шестизвенная шарнирная система механизмом быть не может.
Из источника информации (Верховский А.В. Шестизвенные пространственные шарнирные механизмы // Известия Томского политехнического института имени С.М. Кирова т. 61, вып.1. 1947. - С. 47-52) известно, что при соблюдении некоторых частных условий шестизвенная шарнирная система, составленная в виде простой замкнутой кинематической цепи, приобретает одну степень подвижности (W=1), т.е. является механизмом. Из формулы (1) следует, что для подвижной шестизвенной шарнирной системы в виде простой замкнутой кинематической цепи следует принять m=1. Следовательно, указанный механизм по Артоболевскому относится к первом семейству механизмов (m=1) и по Добровольскому «на весь механизм в целом наложена одна общая связь». Синтез подобных пространственных механизмов трудоемок из-за неопределенности общих связей накладываемых на механизм в целом.
В этом же источнике информации описан способ синтеза шестизвенного пространственного механизма с вращательными кинематическими парами, имеющего плоскость симметрии, при котором составляется конфигурация желаемого симметричного механизма в одном произвольном положении. В силу симметрии, в которой плоскость симметрии проходит через оси шарниров, конфигурация будет механизмом.
Недостатком известного способа синтеза пространственного механизма является ограниченность области применения способа, реализующегося лишь в конфигурациях, имеющих плоскость симметрии.
Известен способ синтеза механизма определенной структуры с заданными кинематическими характеристиками звеньев и возможными движениями в кинематических парах, включающий поиск положения звеньев, путем циклического повторения определения оптимального положения для каждого звена кинематической цепи, при котором механизм наиболее близок к замкнутому состоянию (Галиуллин И.А. Синтез подвижных шестизвенных механизмов [Текст] / И.А. Галиуллин, М.Г. Яруллин // Проблемы и перспективы развития авиации, наземного транспорта и энергетики «АНТЭ-2013»: Международная научно-техническая конференция, 19-21 ноября 2013 г.: Сборник докладов, Казань: Из-во Казан. гос. техн. ун-та, 2013. - С. 23-31).
Недостатком указанного способа синтеза пространственного механизма является сложность поиска положений звеньев, при которых замкнутая кинематическая цепь приобретет одну степень подвижности, т.е. его повышенная трудоемкость. Кроме этого, отсутствует гарантия того, что после замыкания кинематической цепи шарнирная система приобретет одну степень подвижности, т.е. станет механизмом, что в целом снижает эффективность способа.
Решаемой задачей изобретения является снижение трудоемкости способа синтеза пространственного механизма, при котором замкнутая кинематическая цепь станет механизмом.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в повышении эффективности способа синтеза пространственного механизма за счет снижения трудоемкости и обеспечения подвижности замкнутой пространственной кинематической цепи.
Технический результат достигается тем, что в способе синтеза пространственного механизма определенной структуры с заданными кинематическими характеристиками звеньев и возможными движениями в кинематических парах, заключающемся в поиске положения звеньев, при котором кинематическая цепь переходит в замкнутое состояние, отличающемся тем, что определяют функцию положения механизма, варьируют функцию положения для возможных движений в кинематических парах при постоянных кинематических характеристиках звеньев с определением алгебраической системы уравнения для вариаций, затем определяют необходимые ограничения для кинематических характеристик звеньев из условия равенства нулю определителя матрицы системы уравнения для вариаций и уточняют кинематические характеристики звеньев с учетом определенных ограничений, осуществляя синтез пространственного механизма.
Способ синтеза пространственного механизма в соответствии с предлагаемым изобретением применим ко всем механизмам независимо от их назначения, менее трудоемок и гарантированно обеспечивает подвижность механизма.
Далее для пояснения технической сущности изобретения рассмотрим подробно на примере четырехзвенного механизма со ссылкой на прилагаемые чертежи, которые необязательно выполняются в масштабе и на которых:
фиг. 1 - схематическое изображение пространственного механизма с вращательными кинематическими парами;
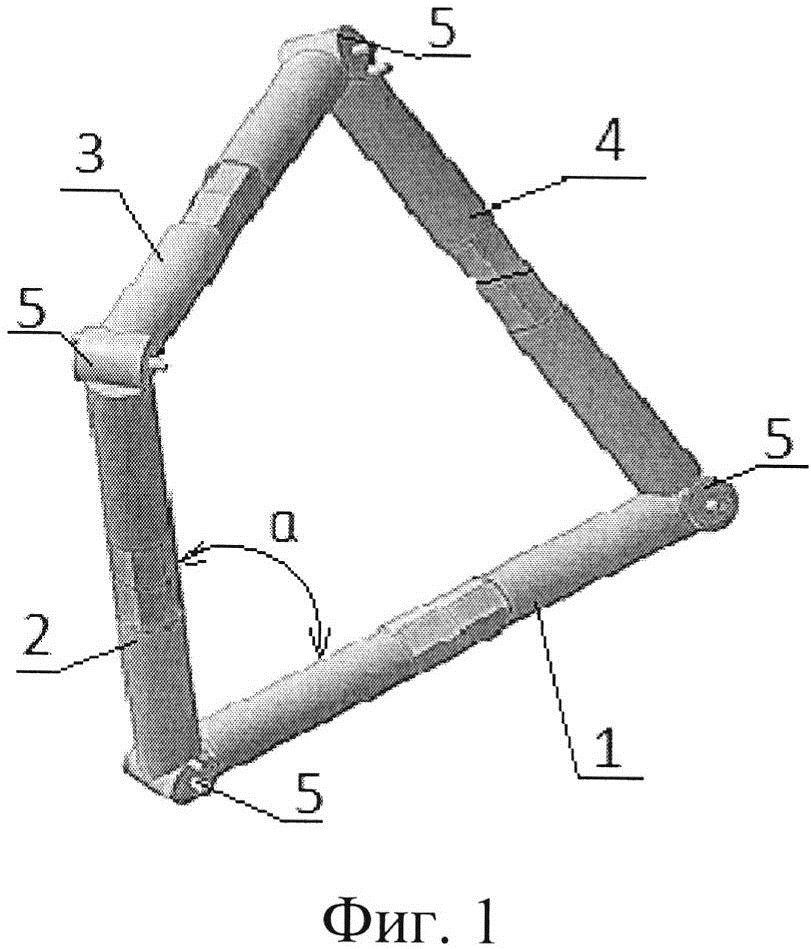
фиг. 2 - схематическое изображение звена,
где: 1, 2, 3, 4 - звенья пространственного механизма;
5 - четыре шарнира;
6 - звено в виде стержня заданной длины;
7 - внутренний элемент шарнира 5;
8 - наружный элемент шарнира 5;
α - угол между звеньями;
θ - угол установки осей вращения шарниров в звене;
l - длина звена.
Пространственный механизм с вращательными кинематическими парами 1-2; 2-3; 3-4; 4-1, показанный на фиг. 1, состоит из четырех звеньев 1, 2, 3, 4, соединенных между собой с помощью четырех шарниров 5. Первое звено неподвижно, а другие три звена могут вращаться на различные углы αi. Звено кинематической пары, показанное на фиг. 2, состоит из стержня 1 длиной l, внутреннего элемента 6 шарнира 5, наружного элемента 7 шарнира 5. Оси симметрии элементов шарнира 6 и 7 взаимно развернуты на постоянные углы установки осей вращения θi·.
Кинематическая характеристика механизма - функция положения F определяется строением механизма и представлена в виде:
F=ƒ (li, θi, αi), (2)
где: i=1, 2, 3, 4.
Варьирование уравнения (2), считая li,·θ постоянными, а αi, переменными приводит к линейной однородной алгебраической системе уравнений третьего порядка относительно вариаций δαi, которые и определяют возможные перемещения механизма.
Из условия равенства нулю определителя системы Δ=0 определяются уточненные кинематические характеристики звеньев механизма li,·θi, обеспечивающие подвижность механизма.
Синтез пространственного механизма в соответствии с изобретением осуществляется в следующем порядке.
Составляют замкнутую цепь из четырех звеньев 1, 2, 3, 4 с вращательными кинематическими парами 1-2; 2-3; 3-4; 4-1, определяют функцию положения механизма F, варьируют функцию положения для возможных движений в кинематических парах δαi при постоянных кинематических характеристик звеньев с определением алгебраической системы уравнения для вариаций δαi затем определяют необходимые ограничения для кинематических характеристик звеньев li, θi из условия равенства нулю определителя матрицы системы уравнения для вариаций Δ и уточняют кинематические характеристики звеньев механизма с учетом определенных ограничений, осуществляя синтез механизма.
Например, обращение Δ=0 для механизма с длинами звеньев l1=l3=l, l2=l4=l√3 дает уточненное значение для углов разворота осей во вращательных парах θ32 и θ41:
 ,
,
Поиск положения звеньев осуществляют с уточненными кинематическими характеристиками звеньев механизма.
По своим технико-экономическим показателям по сравнению с известными аналогами заявляемый способ синтеза пространственного механизма, заключающийся в поиске положений звеньев кинематических пар, является эффективным, при котором кинематическая цепь переходит в замкнутое состояние, менее трудоемок и гарантированно обеспечивает подвижность, то есть является механизмом.
Способ синтеза пространственного механизма определенной структуры с заданными кинематическими характеристиками звеньев и возможными движениями в кинематических парах, заключающийся в поиске положения звеньев, при котором кинематическая цепь переходит в замкнутое состояние, отличающийся тем, что определяют функцию положения механизма, варьируют функцию положения для возможных движений в кинематических парах при постоянных кинематических характеристиках звеньев с определением алгебраической системы уравнения для вариаций, затем определяют необходимые ограничения для кинематических характеристик звеньев из условия равенства нулю определителя матрицы системы уравнения для вариаций и уточняют кинематические характеристики звеньев с учетом определенных ограничений, осуществляя синтез пространственного механизма.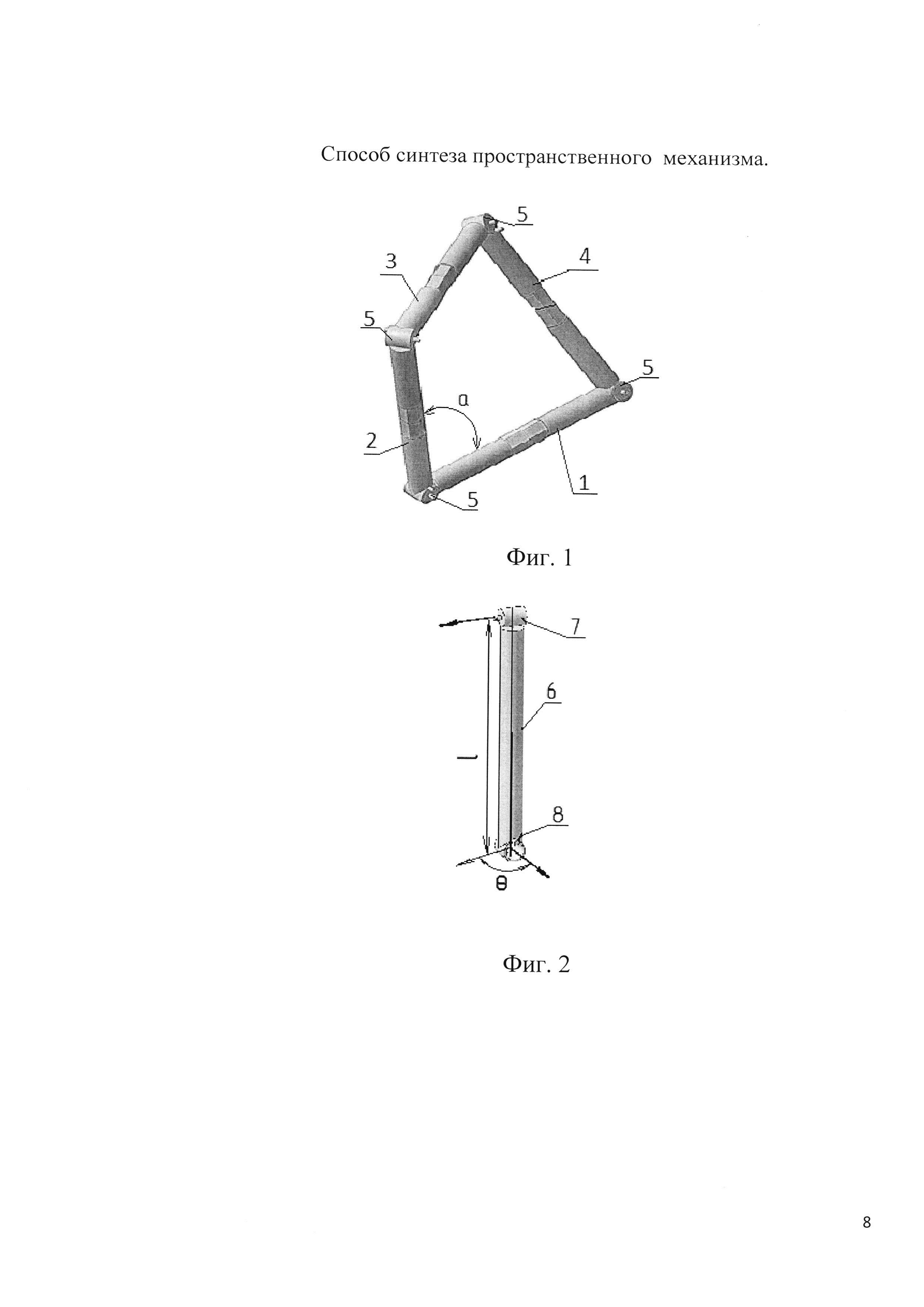
Мотор-колесо
Состав и способ получения пленочного связующего на основе эпоксидных смол
Связующее для пропитки волокнистого наполнителя, способ получения, препрег на его основе и изделие из него
Глушитель шума
Способ управления дифферентом буксируемого подводного объекта
Тренажер для изучения авиагоризонта
Гибкий многослойный тонкопленочный световозвращающий материал, способ получения световозвращающего материала и устройство для его получения
Способ общения глухих (слабослышащих) со слышащими
Сотовая структура
Система управления трудовыми ресурсами предприятия - "цифровой кластер "предприятие - вуз"
Сотовая структура
Сетчатая оболочка
Летательный аппарат аварийно-спасательный
Способ утилизации попутного нефтяного газа и энергетическая машина для его осуществления
Сферический подшипник скольжения

