Результат интеллектуальной деятельности: ДИНАМИЧЕСКОЕ ОРТОСКОПИЧЕСКОЕ ИЗМЕРЕНИЕ
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
Проектирование и разработка электронного оборудования следуют тенденции постоянного уменьшения размеров с того времени как Гордон Мур, соучредитель корпорации Intel®, в 1965 году выдвинул идею о том, что плотность размещения транзисторов (следовательно, и производительность при выполнении вычислений) на заданной площади микросхемы увеличивается в два раза приблизительно в течение каждых 24 месяцев, до некоторой степени в виде пророческого утверждения, что стало широко известно как «Закон Мура». Медицинские устройства и оборудование не являются исключением из тенденции миниатюризации электронного оборудования. Микроэлектронное оборудование часто применяется в качестве датчиков для обеспечения обратной связи при диагностике текущего состояния пациента, например, для измерения пульса, насыщения кислородом, температуры тела и мониторинга жизненно важных органов плода при рождении ребенка.
В процессе осуществления хирургических процедур сенсорное восприятие часто распространяется на приводные механизмы хирургических инструментов, таких как ортоскопические системы шейвинга или выполнения разрезов. Ортоскопические хирургические устройства (и другие эндоскопические устройства) обеспечивают возможность минимально инвазивного осуществления процедур через апертуры (отверстия), которые обеспечивают доступ к операционному полю, в отличие от традиционной открытой хирургии, при которой требуется выполнение иссечения вдоль всего операционного поля. Следовательно, ортоскопические процедуры часто осуществляются в ограниченных пространствах внутри брюшной полости пациента с использованием удлиненных зондов ортоскопических хирургических инструментов. Часто требуется точное манипулирование этими инструментами с целью проведения их через узкие зазоры в операционном поле. Соответственно, стремятся избегать объемных и громоздких конструкций ортоскопических хирургических устройств и инструментов, которые могли бы препятствовать точному манипулированию хирургом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Способ и оборудование динамического сенсорного восприятия используют микроэлектромеханические системы (МЭМС) и наноэлектромеханические (НЭМС) хирургические датчики, предназначенные для сбора и передачи данных о хирургических параметрах, относящихся к приводному механизму хирургического устройства, таких как скорость, угол поворота, вращающий момент и другие характеристики хирургического устройства. Микромеханические приборы, в отличие от традиционного электронного оборудования, являются механизмами малых размеров, приспособленными для осуществления управления физическими перемещениями, такими как перемещение рычагов, шестерней и преобразователей, в дополнение к выполнению вычислений. В хирургическом устройстве применяется, либо на хирургическое устройство или рядом с ним прикрепляется хирургический датчик, предназначенный для детектирования электромеханических характеристик в процессе осуществления хирургической процедуры. При осуществлении хирургической процедуры медицинское устройство размещается в операционном поле так, чтобы оно реагировало на работу приводного механизма шейвера или другого эндоскопического инструмента, введенного в операционное поле, заданное хирургической процедурой.
Традиционные датчики, предназначенные для обеспечения диагностической обратной связи для ортоскопических процедур, имеют тенденцию загромождать операционное поле и требуют применения дополнительных привязок (проводных соединителей) к инструментам. Уменьшенный размер хирургического датчика позволяет обеспечить неинвазивное размещение в операционном поле таким образом, что датчик не взаимодействует с или не оказывает неблагоприятного воздействия на выполнение операции управления хирургическим устройством, для которого он измеряет хирургические параметры. Уменьшенный размер также имеет преимущества с точки зрения стоимости изготовления и отходов, что касается одноразовых и утилизируемых после использования инструментов, которые становятся ненужными после использования их для одного пациента.
В конфигурациях, описанных ниже, в приводе хирургического устройства применяются хирургические датчики на основе МЭМС или НЭМС, предназначенные для предоставления данных и статистики производительности приводному механизму с целью использования их в качестве параметров обратной связи и управления с целью изменения, например, скорости и угла поворота шейвера пропорционально помпе, которая производит откачку в операционном поле. Хирургический датчик прикреплен или каким-либо иным образом расположен на "вальце" или вращающейся втулке шейвера. Режущее лезвие проходит в осевом направлении от вальца с целью передачи вращательного движения режущей кромке, находящейся на противоположном конце режущего лезвия. Валец вращается в ответ на работу приводного механизма с целью передачи режущей и/или вытягивающей силы шейверу, путем непрерывного или осциллирующего вращения для передачи режущей силы режущей кромке. Хирургический датчик определяет угол поворота, скорость и вращающий момент шейвера с целью детектирования скорости, характеризующей скорость иссечения, и вращающего момента, который может характеризовать верхний предел структурной устойчивости узла вальца и лезвия.
Описанные здесь конфигурации частично основываются на наблюдениях того, что в традиционных подходах применяются метки Радиочастотной Идентификации (RFID) на хирургических инструментах и оборудовании, предназначенные для отслеживания в процессе осуществления хирургической процедуры. В то время как чипы радиочастотной идентификации могут изготавливаться имеющими малые размеры и пассивными (т.е. с питанием от внешнего запускающего сигнала), мощность проведения вычислений или выполнения является ограниченной. Следовательно, к сожалению, традиционные подходы к осуществлению сенсорного определения параметров страдают от недостатка, заключающегося в том, что отклик, как правило, ограничен идентификацией устройства или инструмента, на который прикреплен чип радиочастотной идентификации, а информация, отличающаяся от идентификационной информации, не предоставляется вследствие ограниченных вычислительных возможностей, которые могут быть закодированы в чипе радиочастотной идентификации.
Соответственно, описанные здесь конфигурации в значительной степени способствуют преодолению вышеописанных недостатков путем предоставления бесконтактного датчика, размещенного на хирургическом устройстве, реагирующем на работу приводного механизма, предназначенного для осуществления сенсорного восприятия динамических характеристик, таких как скорость, угол поворота и вращающий момент, а также для передачи воспринятых характеристик посредством беспроводного интерфейса приводному источнику с целью осуществления чувствительного управления. Беспроводный интерфейс обеспечивает возможность прикрепления хирургического датчика к вращающемуся или движущемуся элементу хирургического устройства, а микромеханическая природа обеспечивает возможность расположения в не представляющем собой помеху местоположении, в котором не оказывается неблагоприятное воздействие на работу хирургического устройства.
В частности, способ обеспечивает динамическую хирургическую обратную связь в процессе осуществления хирургической или терапевтической процедуры путем определения сенсорной зоны на хирургическом устройстве таким образом, что сенсорная зона приспособлена для принятия интегрированного микромеханического устройства и реагирует на воспринимаемые электромеханические стимулирующие воздействия в процессе осуществления хирургической процедуры. Хирургическое устройство связано с приводным источником с целью осуществления хирургических процедур, а интегрированное микромеханическое устройство прикреплено к сенсорной зоне с целью динамического детектирования хирургических параметров в процессе осуществления хирургической процедуры. Интегрированное микромеханическое устройство (микромеханическое устройство) поддерживает беспроводную связь с устройством управления, реагирующим на работу интегрированного микромеханического устройства, для обеспечения принятия динамически детектированных хирургических параметров от интегрированного микромеханического устройства в процессе осуществления хирургической процедуры, при этом не препятствующее работе размещение в сенсорной зоне обеспечивает то, что воспринятые хирургические параметры не искажаются присутствием микромеханического устройства вследствие бесконтактного размещения интегрированного микромеханического устройства в сенсорной зоне.
В конкретной конфигурации заявленный подход имеет особенную полезность при осуществлении эндоскопической процедуры, такой как хирургия коленного сустава, обсуждаемая здесь в качестве примерного приложения. В способе, охватывающем среду медицинского устройства, обеспечивается управление хирургическим устройством экстракции, таким как шейвер, и включающим интегрированное микромеханическое устройство, настроенное для осуществления сенсорного восприятия параметров вращения, при этом устанавливается беспроводная связь микромеханического устройства с устройством управления для пересылки воспринятых параметров вращения. С помощью механизма крепления интегрированное микромеханическое устройство крепится к вращающейся втулке, обеспечивающей привод хирургического лезвия, при этом вращающаяся втулка реагирует на приводной источник, приводя во вращение хирургическое лезвие для выполнения разрезов и экстракции хирургического материала. Поскольку вращающаяся втулка ограничивает возможность физического соединения вследствие движения (вращения), беспроводное соединение снижает необходимость иметь физическое соединение с помощью приводов. Хирург размещает хирургическое лезвие в операционном поле с целью проведения терапевтических процедур с вращением хирургического лезвия, а микромеханическое устройство воспринимает, исходя из вращения втулки, параметры вращения, вызванные центробежными силами, действующими на микромеханическое устройство. Микромеханическое устройство передает воспринятые параметры вращения устройству управления с целью получения хирургических параметров, при этом устройство управления связано с помпой и настроено так, чтобы осуществлять управление помпой в ответ на полученные хирургические параметры, тем самым обеспечивая пропорциональное управление помпой в ответ на характер работы шейвера.
Альтернативные конфигурации изобретения включают мультипрограммное или мультипроцессорное компьютеризированное устройство, такое как микропроцессор, контроллер или специализированное вычислительное устройство, или подобное устройство, совмещенное с программным обеспечением и/или схемой (например, процессор, как кратко изложено выше), и предназначенное для обработки любой из всех операций способов, описанных здесь в качестве вариантов воплощения изобретения. Дополнительные варианты воплощения изобретения включают программы, такие как Виртуальная Машина Java и/или операционная система, которые могут работать сами по себе или в сочетании друг с другом, с мультипроцессорным компьютеризированным устройством с целью реализации шагов и операций варианта воплощения способа, кратко изложенных выше и описанных подробно ниже. Один такой вариант воплощения содержит компьютерный программный продукт, который имеет машиночитаемый носитель информации постоянного хранения, включающий в себя программную логику, закодированную в виде команд, которые, при выполнении мультипроцессорным компьютеризированным устройством, имеющим связку из элемента памяти и процессора, программируют процессор на выполнение операций, описанных здесь в качестве вариантов воплощения изобретения, для выполнения запросов на получение доступа к данным. Такие компоновки изобретения, как правило, предоставляются в виде программного обеспечения, кода и/или других данных (например, структур данных), скомпонованных или закодированных на машиночитаемом носителе информации, таком как оптический носитель информации (например, CD-ROM), гибкий или жесткий диск или другой носитель информации, такой как встроенное программное обеспечение или микрокод в одном или более чипов ROM, RAM или PROM, программируемые вентильные матрицы (FPGA) или проблемно-ориентированная интегральная микросхема (ASIC). Программное обеспечение или встроенное программное обеспечение, или другие такие конфигурации могут быть установлены на компьютеризированное устройство (например, в процессе работы операционной системы или в процессе установки среды) с целью вызвать реализацию компьютеризированным устройством способов, объясняемых здесь в качестве вариантов воплощения изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеупомянутые и другие объекты, характерные особенности и преимущества изобретения будут очевидны из нижеследующего описания конкретных вариантов воплощения изобретения, что проиллюстрировано на сопроводительных чертежах, на которых подобные условные обозначения относятся к одним и тем же частям на различных видах. Чертежи не обязательно соответствуют масштабу, вместо этого упор делается на иллюстрацию принципов изобретения.
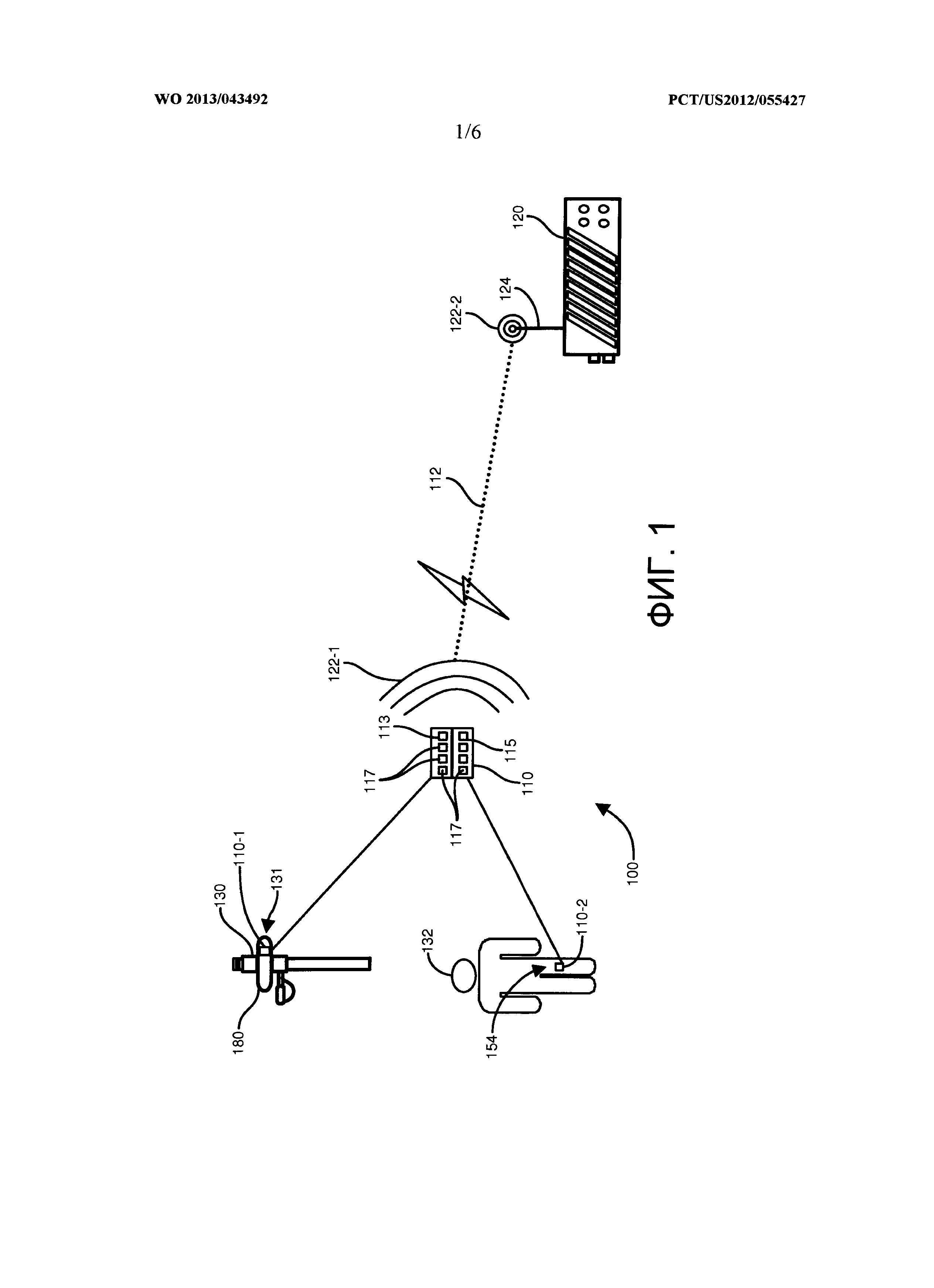
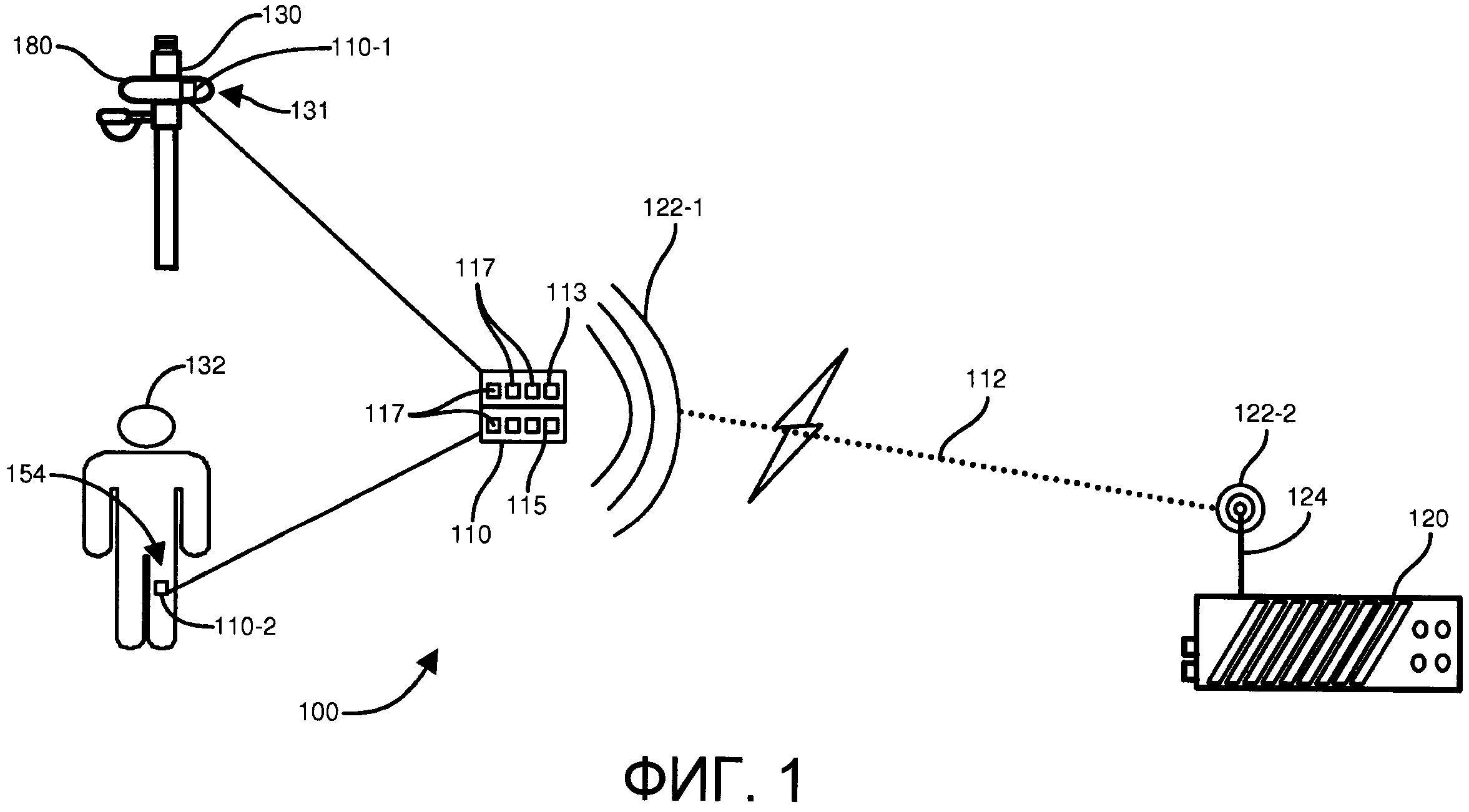
На Фигуре 1 показана контекстная диаграмма среды медицинского устройства, подходящей для использования с конфигурацией, описанной здесь.
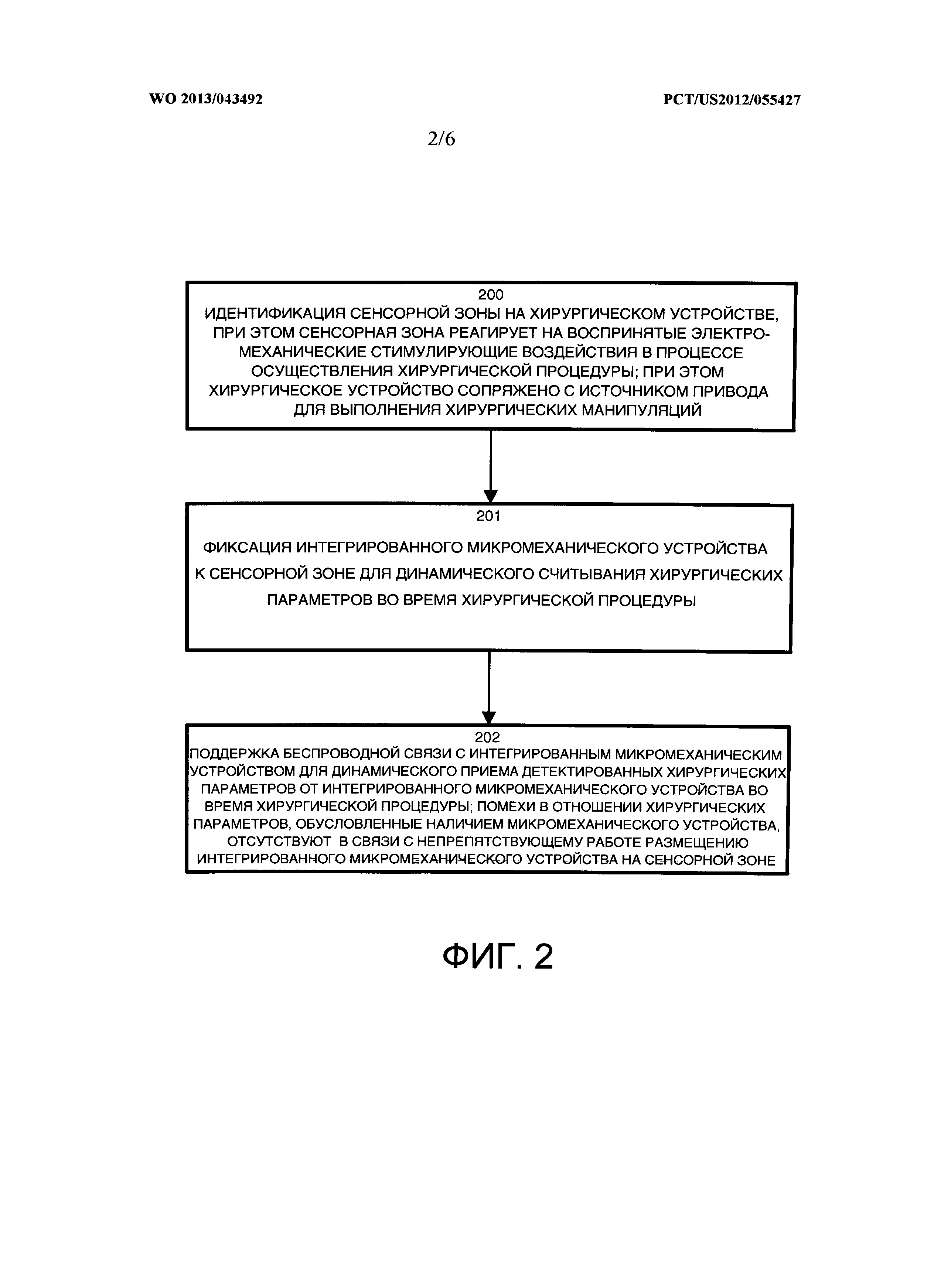
На Фигуре 2 показана структурная схема осуществления динамического сенсорного восприятия параметров, как описано здесь.
На Фигуре 3 показана диаграмма ввода в действие датчика в среде, показанной на Фигуре 1.
На Фигурах 4-6 показана структурная схема эндоскопической сенсорной компоновки в процессе осуществления хирургической процедуры.
ПОДРОБНОЕ ОПИСАНИЕ
Ниже описана примерная конфигурация среды медицинского устройства, в которой применяется динамическая обратная связь посредством микромеханических хирургических датчиков. В показанном примере хирургическое устройство является хирургическим шейвером, реагирующим на работу приводного источника, предназначенного для обеспечения вращательного движения с целью выполнения разрезов и удаления хирургического материала, такого как кость и ткань, из операционного поля. Хирургический датчик крепится к так называемому вальцу или вращающейся втулке, которые реагируют на работу приводного источника. Режущая кромка на конце режущего лезвия вращается или колеблется с целью экстракции хирургического материала, а полая внутренняя область трубчатого лезвия обеспечивает возможность откачки с помощью помпы, которая также управляется приводным источником.
На Фигуре 1 показана контекстная диаграмма среды 100 медицинского устройства, подходящей для использования с конфигурациями, описанными здесь. Обращаясь к Фигуре 1, в среде 100 медицинского устройства применяется интегрированное микромеханическое устройство (микромеханическое устройство) 110, предназначенное для размещения в пределах хирургической среды, такой как, показанное в виде 110-1 шейвер 130, или, показанное в виде 110-2 в операционном поле 154 пациента 132, (в общем случае 110). Микромеханическое устройство 110 в конкретной конфигурации является устройством на основе МЭМС или НЭМС и поддерживает беспроводное соединение 112 с устройством управления приводом 120 или другим центральным устройством управления, чувствительным к сигналам 122, идущим к антенне беспроводной связи 124 (122-1) или от нее (122-2). Микромеханическое устройство 110 включает приемник 115, чувствительный к сигналам 122-2, идущим от антенны 124 с целью подачи запросов на осуществление сенсорного восприятия хирургических параметров, и передатчик 113, сконфигурированный для передачи воспринятых хирургических параметров обратно устройству управления 120 в виде сигналов 122-1, при этом оно может включать другие компоненты 117 сенсорного восприятия, проведения вычислений или подачи питания. Микромеханическое устройство 110 может быть пассивным, то есть сигналы 122-2, кроме прочего, обеспечивают питанием устройство 110, при этом оно является в достаточной степени малым, чтобы принятые сигналы 122-2 обеспечивали возможность проведения обработки и передачи воспринятых параметров 122-1, кроме того, микромеханическое устройство 110 может иметь другие сенсорные зоны, функции обработки или механические характеристики, чувствительные к сигналу 122-2.
Размещение микромеханического устройства 110 таково, что оно непосредственно воспринимает хирургические параметры, такие как скорость, угол поворота и вращающий момент, может крепится к внутренней части хирургического шейвера 130, как показано в виде микромеханического устройства 110-1, или может работать непосредственно в месте проведения операции 154. Микромеханическое устройство 110, будучи однажды размещенным, активируется от сигнала 122-2, получаемого от устройства управления 120, и осуществляет выполнение задач сенсорного восприятия, проведения вычислений и передачи с последующим возвратом воспринятых хирургических параметров 122-1. В составе шейвера 130 микромеханическое устройство 110-1 прикреплено к вальцу или втулке 180, которая затем вставляется в место проведения операции с целью выполнения хирургического разреза и экстракции, обсуждаемых дополнительно ниже со ссылкой на Фигуру 3.
На Фигуре 2 показана структурная схема динамического сенсорного восприятия параметров, описанного здесь. В среде 100 хирургического устройства описанный способ управления хирургическим приспособлением включает, на шаге 200, определение сенсорной зоны на хирургическом устройстве 130 таким образом, что сенсорная зона 131 реагирует на воспринятые электромеханические стимулирующие воздействия в процессе осуществления хирургической процедуры. Хирургическое устройство 130 связано с приводным источником 120 с целью осуществления хирургических процедур, таких как сверление или откачка. Во вращательном устройстве, таком как иллюстрируемый шейвер 130, сенсорная зона 131, например, может находиться на вращающейся части, подверженной во время работы действию центробежных сил со стороны приводного источника 120. В микромеханическом устройстве 110-1 могут быть применены различные возможности сенсорного восприятия, такие как, упоминая несколько, переменное сопротивление, сенсорное восприятие давления, гироскопическое сенсорное восприятие и сенсорное восприятие с помощью тензометра.
С помощью механизма крепления интегрированное микромеханическое устройство 110-1 прикрепляется к сенсорной зоне 131 с целью динамического детектирования хирургических параметров в процессе осуществления хирургической процедуры, как показано на шаге 201. Механизм крепления может быть любым подходящим способом крепления, таким как штифты, клей, сварка растворителем, или может быть деталью изготовления хирургического инструмента, такой как полость или карман, сформированные, например, в процессе литья.
Микромеханическое устройство 110 поддерживает беспроводную связь с устройством управления приводом 120, динамически принимающего детектированные хирургические параметры в виде сигналов 122-1, поступающих от интегрированного микромеханического устройства 110 в процессе осуществления хирургической процедуры, как изображено на шаге 202. Местоположение и размер устройства 110 таковы, что хирургические параметры не подвергаются воздействию присутствия интегрированного микромеханического устройства вследствие бесконтактного размещения интегрированного микромеханического устройства в сенсорной зоне 131.
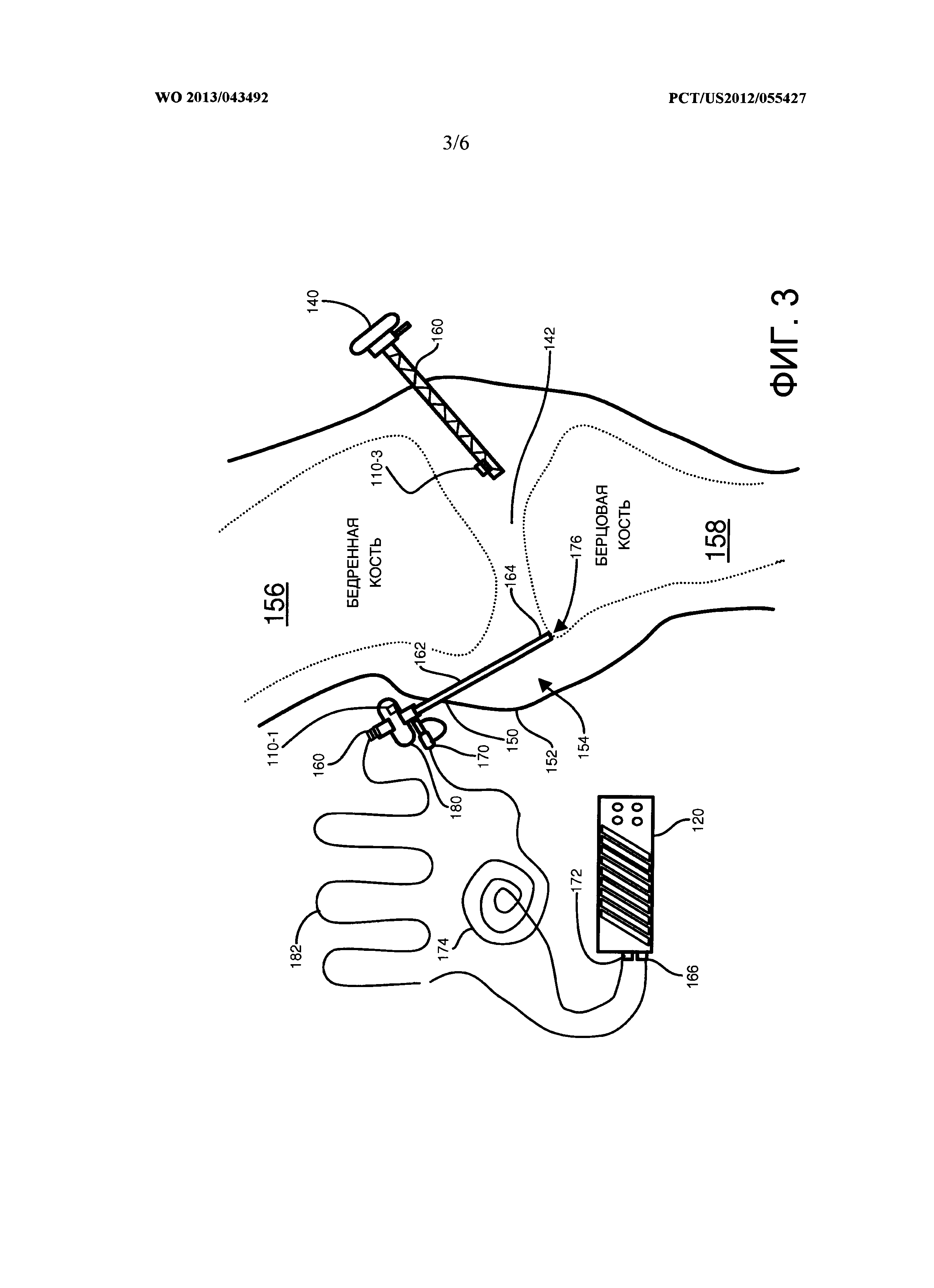
На Фигуре 3 показана диаграмма ввода в действие датчика в среде, показанной на Фигуре 1. Обращаясь к Фигурам 1 и 3, изображена примерная компоновка ввода в действие микромеханического устройства 110 для проведения эндоскопической процедуры на колене. Хирург помещает шейвер 130 через эндоскопическое отверстие 150 в колено 152 пациента. Шейвер 130 проходит сквозь кожу и мягкие ткани в хирургическую полость 154, находящуюся между бедренной костью 156 и большеберцовой костью 158. Шейвер 130 включает приводное соединение 160, предназначенное для сообщения с приводным каналом 166 устройства управления 120 посредством приводного кабеля 182. Приводное соединение 160 может принимать электрическую, пневматическую, гидравлическую или другую подходящую приводную среду для подачи питания на втулку 180, прикрепленное хирургическое лезвие 162 и режущую кромку 164. Шейвер 130 также включает всасывающий канал 170, предназначенный для сообщения с выпускным отверстием 172 посредством набора трубок 174. Устройство управления приводом 120 использует всасывание (как правило, с помощью хирургической помпы) с целью вывода хирургического материала из шейвера через полую внутреннюю часть 176 хирургического лезвия 162. Как вариант, может применяться отдельная помпа, отделенная от устройства управления приводом 120, которое подает питание на шейвер 130. Процедура может также включать одну или более канюль 140, имеющих микромеханическое устройство 110-3, прикрепляемое к внутренней части направляющей трубки 160 канюли 140 с целью осуществления сенсорного восприятия давления, потока и температуры физиологического раствора, прокачиваемого через направляющую трубку 160 канюли, и с целью дополнительного промывания или очищения (отсасывания) места проведения операции.
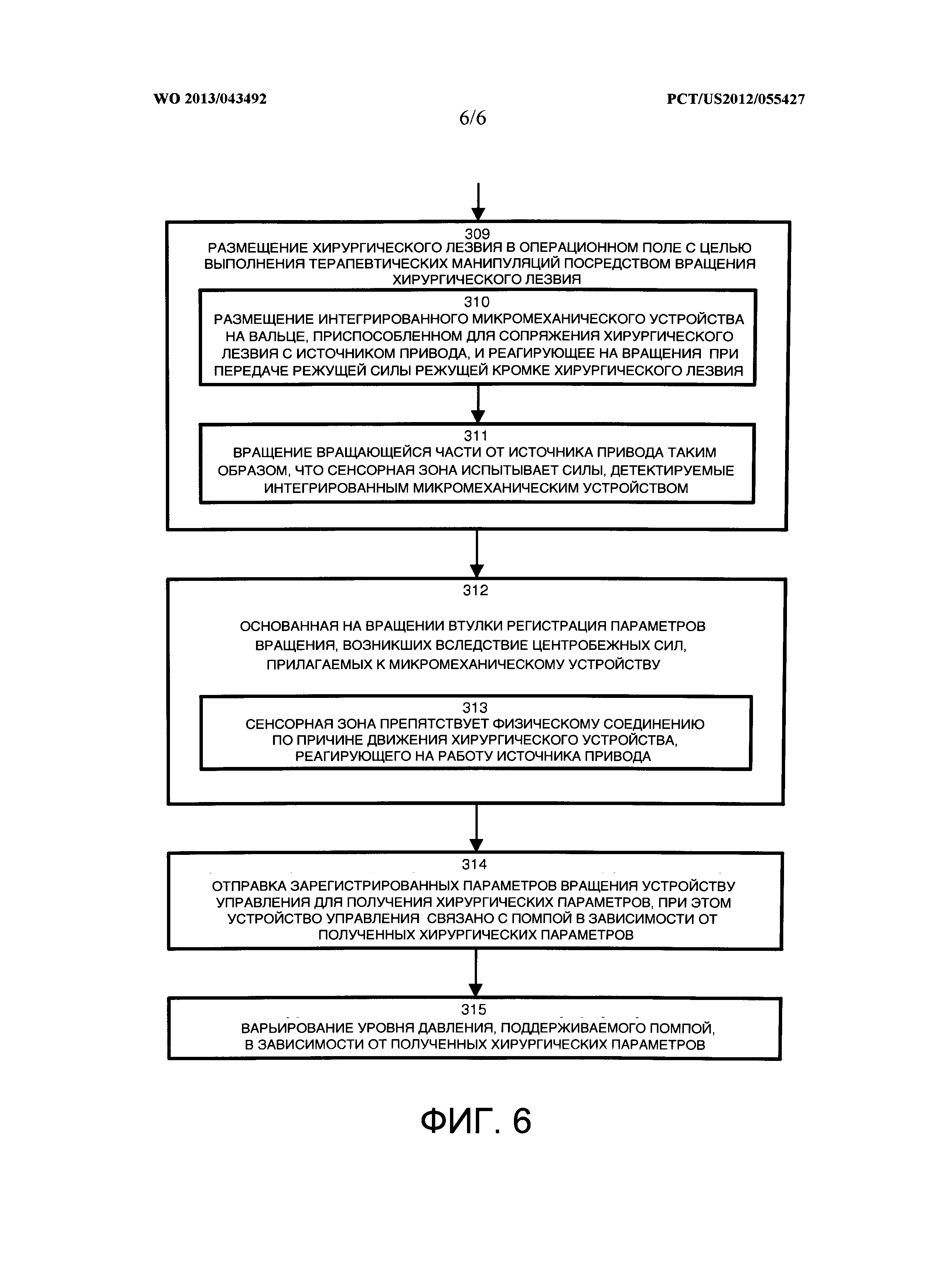
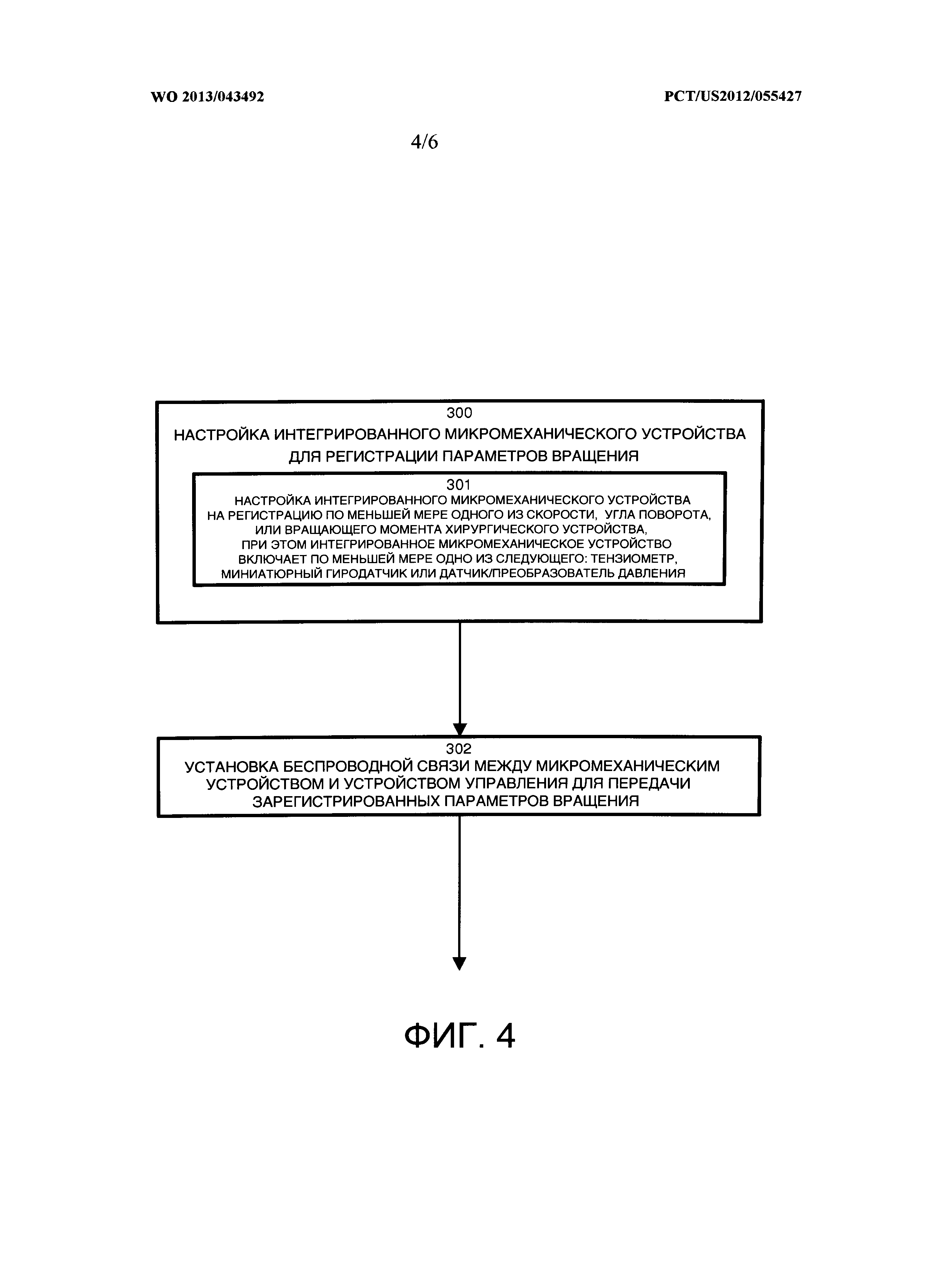
На Фигурах 4-6 показана структурная схема эндоскопической сенсорной компоновки в процессе осуществления хирургической процедуры. Обращаясь к Фигурам 1 и 3-6, способ управления хирургическим устройством для экстракции, таким как шейвер 130, включает настройку интегрированного микромеханического устройства 110-1 для осуществления сенсорного восприятия параметров вращения, как изображено на шаге 300. В примерной компоновке это включает настройку микромеханического устройства 110-1 для восприятия по меньшей мере одного из: скорости, угла поворота или вращающего момента хирургического устройства, при этом интегрированное микромеханическое устройство содержит по меньшей мере одно из: тензометр, миниатюрный гиродатчик или датчик/преобразователь давления, как описано на шаге 301. В микромеханическом устройстве 110 при его изготовлении могут быть настроены или созданы различные сенсорные и вычислительные возможности. В частности, сенсорное восприятие параметров вращения, благодаря действию центробежной силы, или детектирование изменяющихся ориентации с помощью оценки гравитационного поля могут характеризовать угол поворота. Микромеханическое устройство 110, кроме того, оборудовано так, чтобы устанавливать беспроводную связь 122-1 от интегрированного микромеханического устройства 110-1 к устройству управления 120 с целью отправки воспринятых параметров вращения, как изображено на шаге 302.
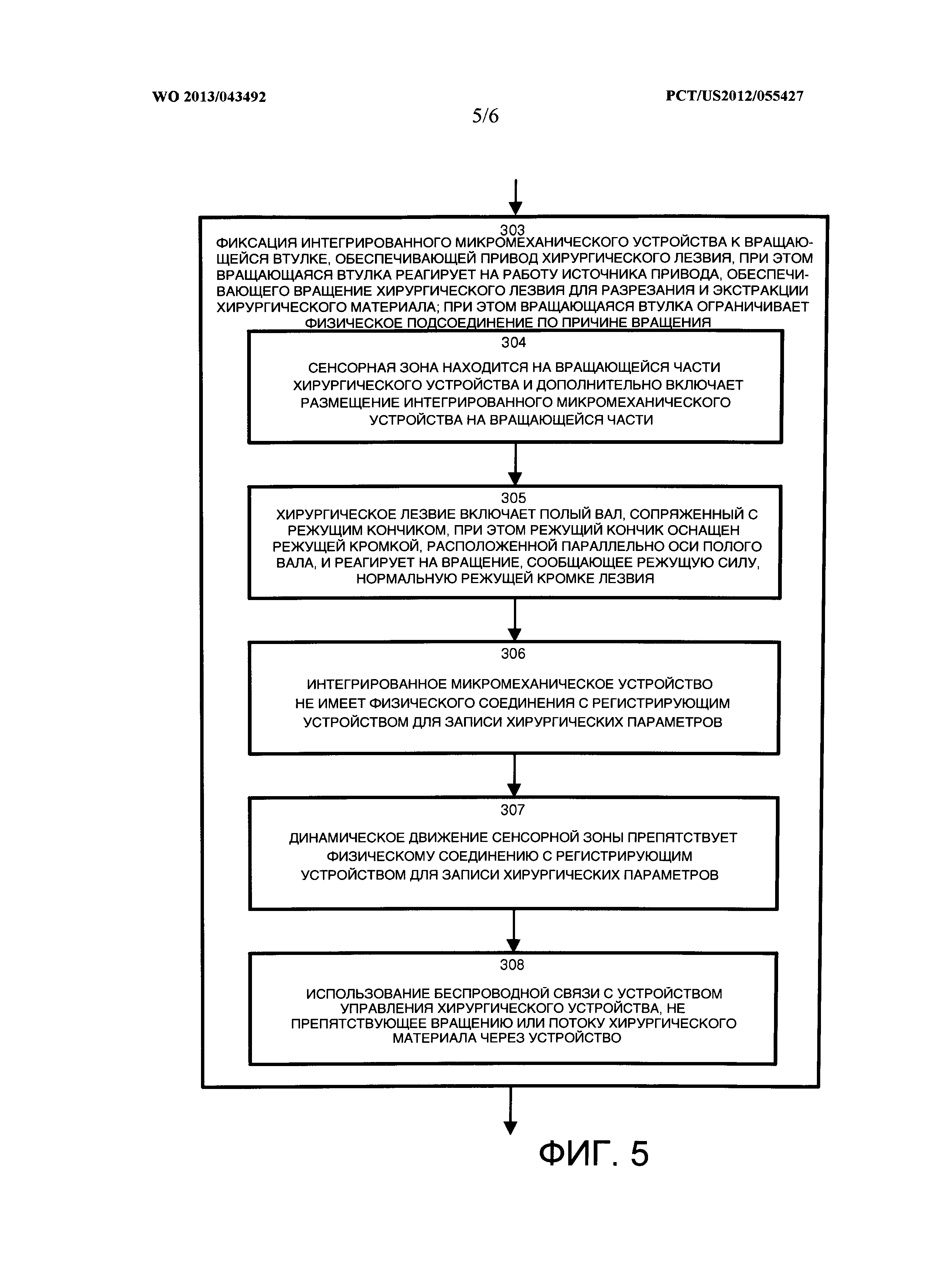
На шейвере 130, оснащенном МЭМС, интегрированное микромеханическое устройство 110 крепится к сенсорной зоне 131, такой как вращающаяся втулка 180, обеспечивающая привод хирургического лезвия, как описано на шаге 303, при этом вращающаяся втулка 180 реагирует на работу приводного источника или устройства управления 120 для последующего вращения хирургического лезвия 162 и выполнения разрезов и экстракции хирургического материала. Несмотря на то, что вращающаяся втулка 180 ограничивает возможность физического соединения вследствие движения (вращения), беспроводная связь предоставляет возможность для сбора хирургических параметров. В показанном примере шейвера 130 сенсорная зона 131 находится на вращающейся части хирургического устройства (втулке шейвера 130), а интегрированное микромеханическое устройство 110 крепится на вращающейся части 180, как изображено на шаге 304.
Хирургическое лезвие 162, идущее от втулки 180, включает полый вал или отверстие 176, связанное с режущим кончиком 164 так, что режущий кончик 164 имеет режущую кромку, параллельную оси полого вала, и реагирует на вращение для приложения режущей силы, нормальной относительно кромки лезвия 162, как описано на шаге 305. Следовательно, в связи с вращением втулки 180, как показано на шаге 306 в микромеханическом устройстве 110 не применяется физическое соединение с регистрирующим устройством, предназначенным для регистрации хирургических параметров, поскольку динамическое движение сенсорной зоны 131 препятствует установлению физической связи с регистрирующим устройством, предназначенным для регистрации хирургических параметров, как изображено на шаге 307. Вместо этого сбор хирургических параметров облегчается путем реализации бесконтактным способом беспроводной связи (например, передатчика 113) на устройстве управления хирургического устройства 130, которое не препятствует вращению или потоку хирургического материала через устройство 130, как описано на шаге 308.
В процессе осуществления хирургической или терапевтической процедур хирург помещает хирургическое лезвие 162 в операционное поле 154 с целью осуществления терапевтических манипуляций с вращением хирургического лезвия 162, как показано на шаге 309. Это включает размещение микромеханического устройства 110 на втулке 180, приспособленной для обеспечения связи хирургического лезвия 162 с приводным источником 120 и реагирующем на вращение с целью приложения режущей силы к режущей кромке 164 посредством хирургического лезвия 162, как изображено на шаге 310. Приводной источник 120 приводит во вращение вращающуюся часть 180 с помощью приводного кабеля 182, идущего от устройства управления приводом 120 так, что сенсорная зона 131 подвергается действию сил, которые могут быть детектированы микромеханическим устройством 110-1, как описано на шаге 311.
Микромеханическое устройство 110 осуществляет сенсорное восприятие, исходя из вращения втулки 180, при этом параметры вращения обусловлены центробежными силами, действующими на микромеханическое устройство 110-1, как показано на шаге 312. Сенсорная зона 131 ограничивает установление физических соединений вследствие движения хирургического устройства 130, реагирующего на работу приводного источника 120, такого как вращение втулки 180 или другого приводного механизма, как изображено на шаге 313. В альтернативных конфигурациях могут вводиться в действие различные возможности для сенсорного восприятия на микромеханическом устройстве 110. Тензометр может применяться для детектирования вращающего момента путем отслеживания поверхностных изменений на втулке 180 для регистрации избыточных или разрушительных сил, которые могут вызвать образование трещин во втулке 180. Центробежные или гравитационные изменения могут быть восприняты, например, с помощью чувствительного к давлению резистора или гиродатчика. В конкретной показанной компоновке шейвера микромеханическое устройство 110-1 отправляет воспринятые параметры вращения или другие параметры устройству управления 120 с целью получения хирургических параметров, при этом устройство управления 120 связано с помпой и настроено так, чтобы осуществлять управление помпой в ответ на полученные хирургические параметры, как изображено на шаге 314. При такой настройке устройство управления приводом 120 изменяет давление, производимое помпой, в ответ на полученные хирургические параметры, как описано на шаге 315, с целью обеспечения уровня давления всасывания пропорционально выведению хирургического материала, образующегося под воздействием скорости и режущей силы со стороны хирургического лезвия 162.
Традиционные подходы показаны в Публикации Патента США №2007/0078484 Таларико и др. (Таларико '484), в которой описан хирургический захват, содержащий рукоятку и две бранши, функционально связанные с рукояткой и приводимые ею в действие. Датчик расположен на внутренней поверхности одной или обеих бранш с целью непосредственного измерения величины давления или силы, приложенных с помощью захвата, как описано в параграфе [0006]. В то время как в параграфах [0047]-[0048] публикации Таларико '484 предлагается использование датчиков на основе МЭМС, датчики предназначены для детектирования давления или силы между браншами. В отличие от предложенного подхода не представлена демонстрация, идея или описание параметров вращения, таких как вращающий момент, скорость или угол поворота. Кроме того, такие параметры вращения были бы неприменимы к линейным силам, относящимся к смыканию поверхностей бранш.
Другая заявка, Публикация Патента США №2008/0167672 Джиордано (Джиордано '672), описывает основные принципы хирургического инструмента, такого как эндоскопические или лапароскопические хирургические инструменты, содержащего по меньшей мере один сенсорный ретранслятор. Публикация Джиордано '672 направлена на хирургические инструменты, в которых некоторая деталь инструмента, такая как свободно вращающийся шарнир, препятствует или иным образом усложняет использование проводного соединения с датчиком (датчиками), как обсуждается в параграфе [0033]. В то время как публикация Джиордано '672 относится к технологии МЭМС, в публикации '672 применяются только датчики в сочлененных браншах захватного устройства 12, как описано в параграфе [0057], и не предлагаются никакие идеи относительно непрерывного вращения, как это происходит в случае вала привода. Соответственно, в публикации Джиордано '672 не имеется демонстрации, идеи или описания датчиков на основе МЭМС, расположенных во вращательной конфигурации, или соединения, предназначенного для осуществления сенсорного восприятия и передачи рабочих параметров, относящихся к вращательному движению, в отличие от предложенного подхода.
В Публикации Патента США №2005/0131390 ('390) представлены основные принципы хирургического сшивающего аппарата с захватывающим устройством, включающего узел кассеты со скобками и опору, функционально связанную с кассетой со скобками, так что кассета со скобками и опора подвижно соединены друг с другом с целью приведения их в соприкосновение друг с другом. Каждая из кассеты со скобками и опоры задает поверхность соприкосновения с тканью, и устройство на основе МЭМС функционально связано с поверхностью соприкосновения с тканью кассеты со скобками и поверхностью соприкосновения с тканью опоры. Множество устройств на основе МЭМС соединено с хирургическим инструментом, при этом устройства на основе МЭМС настроены и приспособлены для измерения расстояния между поверхностью соприкосновения с тканью узла кассеты со скобками и поверхностью соприкосновения с тканью опоры, как обсуждается в параграфе [0014].
Описанные в заявке '390 устройства на основе МЭМС настроены и приспособлены для измерения по меньшей мере одного из: величины давления, приложенного к ткани, толщины ткани, зажатой между поверхностью соприкосновения с тканью узла кассеты со скобками и поверхностью соприкосновения с тканью опоры, как обсуждается в параграфе [0015]. Однако, в отличие от предложенного подхода, не представляется какого-либо описания датчиков, применяемых к вращению или вращательному движению, или относящейся к этому обратной связи рабочих данных или параметров вращательного движения.
Специалисты в данной области должны легко понять, что программы и способы для измерения хирургических параметров, определенные здесь, могут предоставляться устройству обработки и рендеринга пользователя во многих видах, включая, но не ограничиваясь следующим:
а) информация, постоянно хранящаяся на носителе информации без возможности перезаписи, таком как постоянные запоминающие устройства,
б) информация, хранящаяся с возможностью изменения на перезаписываемом носителе информации постоянного хранения, таком как гибкие диски, магнитные ленты, компакт-диски, устройства оперативной памяти и другие оптические или магнитные носители информации, или
в) информация, передаваемая компьютеру посредством каналов передачи информации, подобно тому, как это происходит в электронной сети, такой как Интернет или телефонные модемные линии. Режимы и способы могут быть воплощены в виде исполняемого объекта программного обеспечения или в виде набора закодированных команд, предназначенных для выполнения процессором, реагирующим на команды. Как вариант, режимы и способы, описанные здесь, могут быть воплощены целиком или частично с использованием компонентов аппаратного обеспечения, таких как Проблемно-Ориентированные Интегральные Микросхемы (ASIC), Программируемые Вентильные Матрицы (FPGA), конечные автоматы, контроллеры или другие компоненты аппаратного обеспечения или устройства, либо сочетания компонентов аппаратного обеспечения, программного обеспечения и встроенного программного обеспечения.
Наряду с тем, что система и способ измерения хирургических параметров были конкретно показаны и описаны со ссылками на их варианты воплощения, специалистам в данной области будет понятно, что различные изменения в форме и деталях могут быть внесены без отклонения от объема изобретения, охватываемого приложенной формулой изобретения.
Устройство и способ для лечения бедренно-вертлужного соударения
Композитный внутренний фиксатор
Протез для имплантации в канал подвздошной кости
Кожух чашки, предотвращающий попадание на нее мягких тканей
Система и способ для определения местоположения рельефного ориентира
Инструмент для артроскопической резекции
Регулирование компрессии кости
Способы и системы обеспечения надежной совместимости медицинских устройств
Устройство для восстановления тканей (варианты)
Синергетические эффекты введения многочисленных добавок в сверхвысокомолекулярный полиэтилен
Устройство и способ для лечения бедренно-вертлужного соударения
Композитный внутренний фиксатор
Протез для имплантации в канал подвздошной кости
Кожух чашки, предотвращающий попадание на нее мягких тканей
Система и способ для определения местоположения рельефного ориентира
Инструмент для артроскопической резекции
Регулирование компрессии кости
Способы и системы обеспечения надежной совместимости медицинских устройств
Устройство для восстановления тканей (варианты)
Синергетические эффекты введения многочисленных добавок в сверхвысокомолекулярный полиэтилен

