Результат интеллектуальной деятельности: Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр
Вид РИД
Изобретение
Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр
Изобретение относится к измерительной технике и может быть использовано в области приборов для измерения линейного ускорения.
Известен способ обеспечения виброустойчивости таких измерителей линейных ускорений в условиях динамических воздействий, описанный в [1, стр. 138]. Способ состоит в выборе при проектировании акселерометра одного параметра - крутизны характеристики (коэффициента передачи) усилителя обратной связи с зоной линейности, превышающей предельно возможные амплитуды колебаний чувствительного элемента акселерометра в переходном процессе.
При этом следует отметить, что рассматриваются колебания чувствительного элемента именно в переходном процессе. Система обратной связи измерителя линейного ускорения обычно проектируется как астатическая, т.е. после завершения переходного процесса (если нет явлений «захвата») чувствительный элемент возвращается в исходное положение (среднее между упорами), в котором при регулировании прибора обеспечивается нулевое значение выходного сигнала измерителя.
Минимизация погрешностей состоит в том, что на этапе проектирования измерителя линейного ускорения обеспечивают равенство единице параметра G=2Mx/R=1, где М=mlA=I⋅KДМ, x=T0/NUкв, R=nβ/Крег, М - момент от воздействия на маятниковость ml линейного ускорения с максимальной заданной амплитудой А, который компенсируется моментом датчика момента I⋅KДМ, х - коэффициент широтной модуляции; Т0, N, Uкв - тактовый период, число заполняющих импульсов и напряжение квантования, соответственно; nβ, Крег - коэффициент демпфирования и коэффициент передачи регулятора, соответственно.
Таким образом, способ состоит в выборе ряда параметров акселерометра, в который входят как параметры его механической части - чувствительного элемента, так и параметры цифровой обратной связи.
При этом в [1, стр. 176] показано, что при отклонении от 1 значения G динамические ошибки измерителя существенно возрастают. В [1, стр. 183] дана численная оценка динамической погрешности акселерометра при конкретном, практически реализованном выборе параметров акселерометра, при действии гармонической вибрации с максимальной амплитудой 20g на частоте 500 Гц, что соответствует вибрациям, задаваемым для реальных условий эксплуатации. В случае, если параметр G отклоняется от единицы в сторону увеличения либо уменьшения, то динамическая ошибка возрастает. Так, при G=0,5 динамическая ошибка возрастает в 4 раза. Для акселерометра с параметрами, приведенными в [1, стр. 181], при G=0,5 и действии гармонической вибрации с амплитудой 20g на частоте 500 Гц динамическая ошибка составляет 1,25⋅10-2g. При указанном выборе параметров акселерометр является системой близкой к линейной с обеспечением необходимых запасов устойчивости. Описанный способ принят за прототип.
Недостаток прототипа заключается в том, что в акселерометре, как в любой близкой к линейной системе автоматического управления с конечными запасами устойчивости, существуют частоты, соответствующие пиковым значениям их АЧХ, при которых отклонения чувствительного элемента максимальны, больше, чем отклонения на других частотах даже при максимальных входных ускорениях. Поэтому отклонение чувствительного элемента на этих частотах, и главное, при скачкообразных воздействиях, могут быть значительными, вплоть до удара чувствительного элемента об упор. Однозначный выбор параметров акселерометра при его проектировании в соответствии со способом-прототипом не позволяет исключить возникновение динамических погрешностей, вплоть до ударов об упоры чувствительного элемента, при скачкообразных вибровоздействиях, которые не могут быть прогнозируемы при проектировании акселерометра.
Задачей изобретения является обеспечение виброустойчивости маятниковых акселерометров с цифровой обратной связью при действии линейных ускорений и вибраций любого характера и любой амплитуды, величина которых не была прогнозирована на этапе проектирования прибора, при этом входные воздействия, естественно, не должны создавать возмущающие моменты, большие, чем максимальный момент датчика момента
Технический результат достигается тем, что в способе обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью, заключающемся в том, что используют маятниковый акселерометр, в цифровой обратной связи которого устанавливают значения периода дискретизации Т0 работы широтно-импульсного модулятора (ШИМ), маятниковости акселерометра, коэффициента демпфирования, коэффициента передачи регулятора Крег, обеспечивающие минимальную динамическую ошибку акселерометра при действии вибраций с максимальным заданным значением амплитуды линейного ускорения, согласно изобретению, измеряют напряжение Uyп на входе АЦП цифрового усилителя при отклонении чувствительного элемента до упора, записывают в память контроллера: пороговое напряжение Uпop: Uпop=Uyп/кзап, где кзап - коэффициент запаса; значение коэффициента передачи регулятора Крегmах, при котором при выбранных параметрах обеспечивается устойчивость системы с минимально допустимыми запасами по амплитуде и фазе, цифровой код уровня сигнала на входе ШИМ U*max, при котором длительность импульса τ(nT0), где n - целое число, равна периоду дискретизации Т0, значение коэффициента К* корректировки значения коэффициента передачи регулятора Крег, при эксплуатации акселерометра обеспечивают изменение значения коэффициента передачи регулятора в микроконтроллере от Крег до Крегmах по закону:
 ,
,
для чего на каждом шаге дискретизации выполняют измерение и сравнение в микроконтроллере напряжения U(nT0) на входе АЦП усилителя со значением Uпор; при значениях напряжений U(nT0), меньших либо равных Uпор, для организованного внутри микроконтроллера ШИМ формируют в микроконтроллере цифровой входной сигнал U*(nT0), соответствующий текущему значению напряжения U(nT0) при значении коэффициента передачи регулятора Крег; обеспечивают формирование ШИМ последовательности импульсов постоянной амплитуды и длительностью τ(nT0)=[U*(nT0)/U*max]⋅Т0; определяют в микроконтроллере тот шаг дискретизации, на котором U(nT0) больше Uпop, обеспечивают на последующих шагах дискретизации формирование в микроконтроллере увеличенного цифрового сигнала U*(nT0)ув для ШИМ, соответствующего значению коэффициента передачи Крег+(|U(nT0)|-Uпop)⋅K*, что обеспечивает увеличение длительности импульсов на выходе ШИМ до величины τ(nT0)ув=[U*(nT0)ув/U*max]⋅T0; обеспечивают соответствующее увеличение длительности открытого состояния, определяемого величиной τ(nT0)ув, переключателя тока усилителя мощности, что обеспечивает поступление с выхода усилителя мощности в обмотку датчика момента акселерометра последовательности импульсов тока стабилизированной амплитуды и увеличенной длительности, определяют тот шаг дискретизации, на котором на входе АЦП напряжение U(nT0) меньше либо равно Uпop, после чего обеспечивают возврат системы обратной связи к режиму работы со значением коэффициента передачи равным Крег.
Маятниковый акселерометр с цифровой обратной связью [1, стр. 163] выбран в качестве прототипа. Прототип содержит чувствительный элемент, емкостной датчик угла, магнитоэлектрический датчик момента, цифровой усилитель обратной связи, включающий предварительный усилитель, систему формирования цифровой обратной связи, содержащую преобразователь напряжение - временной интервал по схеме ШИМ, выполненный на аналоговых элементах (интегрирующей емкости либо операционном усилителе, включенном по схеме интегратора), усилитель мощности, включающий переключатель тока и стабилизатор тока, генератор тактовой частоты, генератор заполняющих импульсов (внешний генератор), при этом выход датчика угла соединен с входом предварительного усилителя, выход которого соединен с входом системы цифровой обратной связи, а выход последней соединен с входом магнитоэлектрического датчика момента.
Прототип имеет структуру с однозначно выбранными параметрами, перечисленными выше, которые обеспечивают минимальную динамическую погрешность при амплитуде виброускорения, не превышающей заданное ожидаемое значение. Это является недостатком прототипа, поскольку при случайных выбросах вибрационных и линейных ускорений не обеспечивается не только допустимое значение динамической погрешности при возникновении переходного процесса с большой амплитудой, но может произойти удар чувствительного элемента об упор с разрушением чувствительного элемента.
Задачей изобретения является введение в конструкцию маятникового акселерометра с цифровой обратной связью элементов, которые позволили бы реализовать способ обеспечения виброустойчивости маятниковых акселерометров с цифровой обратной связью при действии вибраций любого характера и любой амплитуды, величина которой не была прогнозирована на этапе проектирования прибора.
Технический результат достигается тем, что в виброустойчивом маятниковом акселерометре с цифровой обратной связью, включающим маятниковый чувствительный элемент, емкостной датчик угла, магнитоэлектрический датчик момента, цифровой усилитель обратной связи, включающий предварительный усилитель, преобразователь напряжение - временной интервал, внешний генератор и усилитель мощности, включающий переключатель тока и стабилизатор тока, при этом датчик угла, цифровой усилитель обратной связи и датчик момента соединены последовательно, согласно изобретению, преобразователь напряжение - временной интервал выполнен в виде микроконтроллера, в котором реализованы АЦП, центральный вычислитель, умножитель частоты, первый таймер, формирующий тактовую частоту, ШИМ, образованный вторым таймером и сравнивающим устройством.
Предлагаемый способ состоит из следующих операций.
1. На этапе проектирования акселерометра с цифровой обратной связью:
1.1. Для определения алгоритма работы цифровой обратной связи, который выражается разностным уравнением, и максимального значения коэффициента передачи регулятора Kpeгmax выполняют следующие операции:
1.1.1. Записывают дифференциальное уравнение движения маятника акселерометра в виде:

В этом уравнении:  - угол, угловая скорость и угловое ускорение маятника, соответственно,
- угол, угловая скорость и угловое ускорение маятника, соответственно,
Iβ, nβ - момент инерции маятника относительно оси подвеса и коэффициент демпфирования движений маятника, соответственно;
Cm - жесткость подвеса маятника; МДМ - момент датчика момента; m - масса маятника; l - плечо (расстояние от оси подвеса до центра масс маятника); А - ускорение.
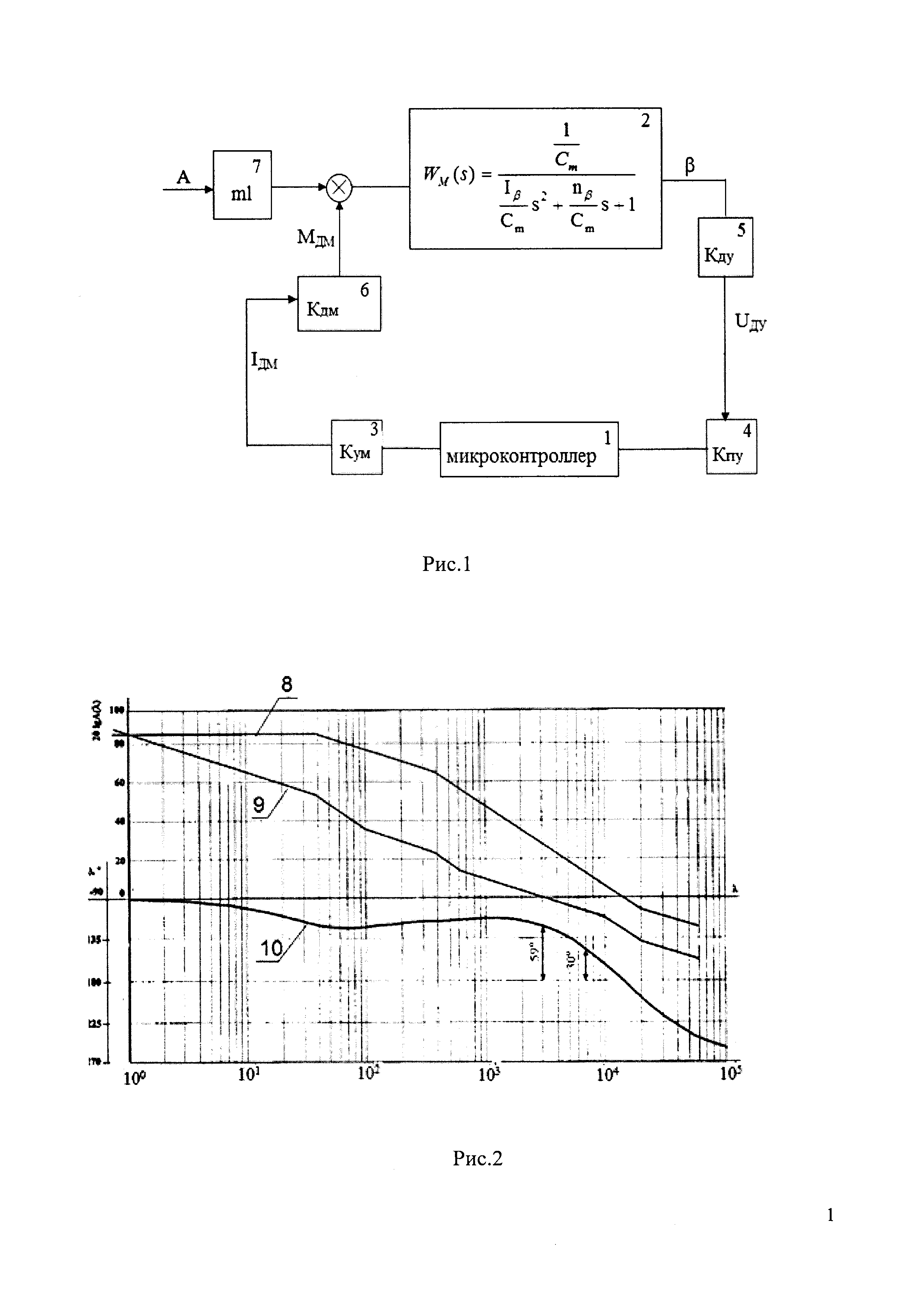
1.1.2. Методами теории автоматического регулирования определяют дискретную частотную передаточную функцию цифрового усилителя обратной связи (ЦУОС), обеспечивающую необходимые запасы устойчивости и динамические характеристики акселерометра. Для чего составляют структурную схему акселерометра с цифровой обратной связью (ЦОС) с учетом уравнения (1), которая имеет вид, показанный на рис. 1.
На рис. 1 обозначено:
1 - микроконтроллер;
2 - WM(s) - передаточная функция маятника;
3 - КУМ - коэффициент передачи усилителя мощности;
4 - КПУ - коэффициент усиления предварительного усилителя (ПУ);
5 - КДУ - коэффициент передачи датчика угла;
6 - КДМ - коэффициент передачи датчика момента;
7 - ml - маятниковость.
Для пояснения рассмотрим конкретный численный пример, относящийся к акселерометру КХ67-041 разработки предприятия ПО «Корпус».
Для этого акселерометра с учетом численных значений параметров, входящих в передаточную функцию WM(s),
КДУ=182 В/рад, КДМ=150 гсм/А, Iβ=1,2⋅10-4 гсмс2, nβ≅0,05 гсмс,
Cm=1,6 гсм/рад, передаточная функция Wa(s), равная WM(s)⋅КДУ⋅КДМ, имеет вид:

Передаточной функции (2) соответствует дискретная частотная передаточная функция

По этой передаточной функции построена асимптотическая логарифмическая амплитудная характеристика (ЛАЧХ) на рис. 2 (ломаная 8).
На рис. 2 построена также желаемая ЛАЧХ разомкнутой системы (ломаная 9), при которой обеспечиваются астатизм системы, требуемые запасы устойчивости по фазе и амплитуде, определяются показатель колебательности и время переходного процесса. По разности ломаных 8 и 9 записывают дискретную частотную передаточную функцию ЦУОС, обеспечивающую необходимые запасы устойчивости и динамические характеристики акселерометра, которая имеет вид:

1.1.3. Получают разностное уравнение - алгоритм работы цифрового вычислителя, для чего с помощью подстановки  в (4) находится дискретная передаточная функция (при Т0=0,5⋅10-4 с)
в (4) находится дискретная передаточная функция (при Т0=0,5⋅10-4 с)

и соответствующее (5) разностное уравнение при

где IДМ(nT0) - среднее за период Т0 значение тока датчика момента.
Уравнение (6) является алгоритмом работы цифрового усилителя обратной связи акселерометра линейных ускорений, разработанного с использованием чувствительного элемента акселерометра КХ67-041.
В общем случае уравнение вида (6) может быть записано для любого акселерометра с цифровой системой обратной связи, называется разностным уравнением и является алгоритмом работы цифрового вычислителя.
На рис. 2 показана также фазовая характеристика (кривая 10) разомкнутой системы, построенная по передаточной функции
Wраз(jλ)=Wa(jλ)⋅D(jλ).
1.1.4. Определяются значения Крег и Крегmах; при Крег обеспечивается штатная работа системы с заданными запасами устойчивости по амплитуде и фазе; при Крегmax для системы имеются минимально допустимые запасы по амплитуде (не менее 6 дБ) и по фазе (не менее 30°). Рассчитывается время переходного процесса tпep при Крег.
Согласно частотным характеристикам на рис. 2 для рассматриваемого примера при номинальном коэффициенте передачи регулятора Крег=КДУ⋅КДМ⋅КЦУОС=182⋅150⋅1=2,73⋅104 гсм/рад, частота среза разомкнутой системы составляет 3000 рад/сек, запас устойчивости по фазе - 59°, по амплитуде - ≈16 дБ.
Достаточный запас устойчивости по фазе 30° соответствует частоте 7500 рад/сек. Следовательно, при увеличении частоты среза разомкнутой системы до 7500 рад/сек, что будет при увеличении КЦУОС (следовательно, и Крег) в три раза, замкнутая система останется устойчивой. Таким образом, Крегmах = 3 ⋅ Крег.
Определяется значение коэффициента К*, при котором обеспечивается переход от Крег к Крегmах за несколько периодов дискретизации Т0 (3…4).
1.1.5. Разрабатывают программу, обеспечивающую работу центрального вычислителя микроконтроллера в соответствии с разностным уравнением, в рассматриваемом примере - с алгоритмом (6),
1.1.6. Разрабатывают программу работы микроконтроллера, в которой коэффициент передачи Крег=Крег(nT0) изменяется по закону

Изменение Крег=Крег(nT0) осуществляется за счет изменения КЦУОС - коэффициента передачи цифрового усилителя обратной связи.
1.1.7. Разрабатывают программу формирования ШИМ длительности импульса постоянной амплитуды по закону τ(nT0)=[U*(nT0)/U*max]Т0, где U*(nT0) - цифровой код уровня сигнала на входе ШИМ, U*max - тот же цифровой код при длительности импульса τ(nT0), равной периоду дискретизации Т0.
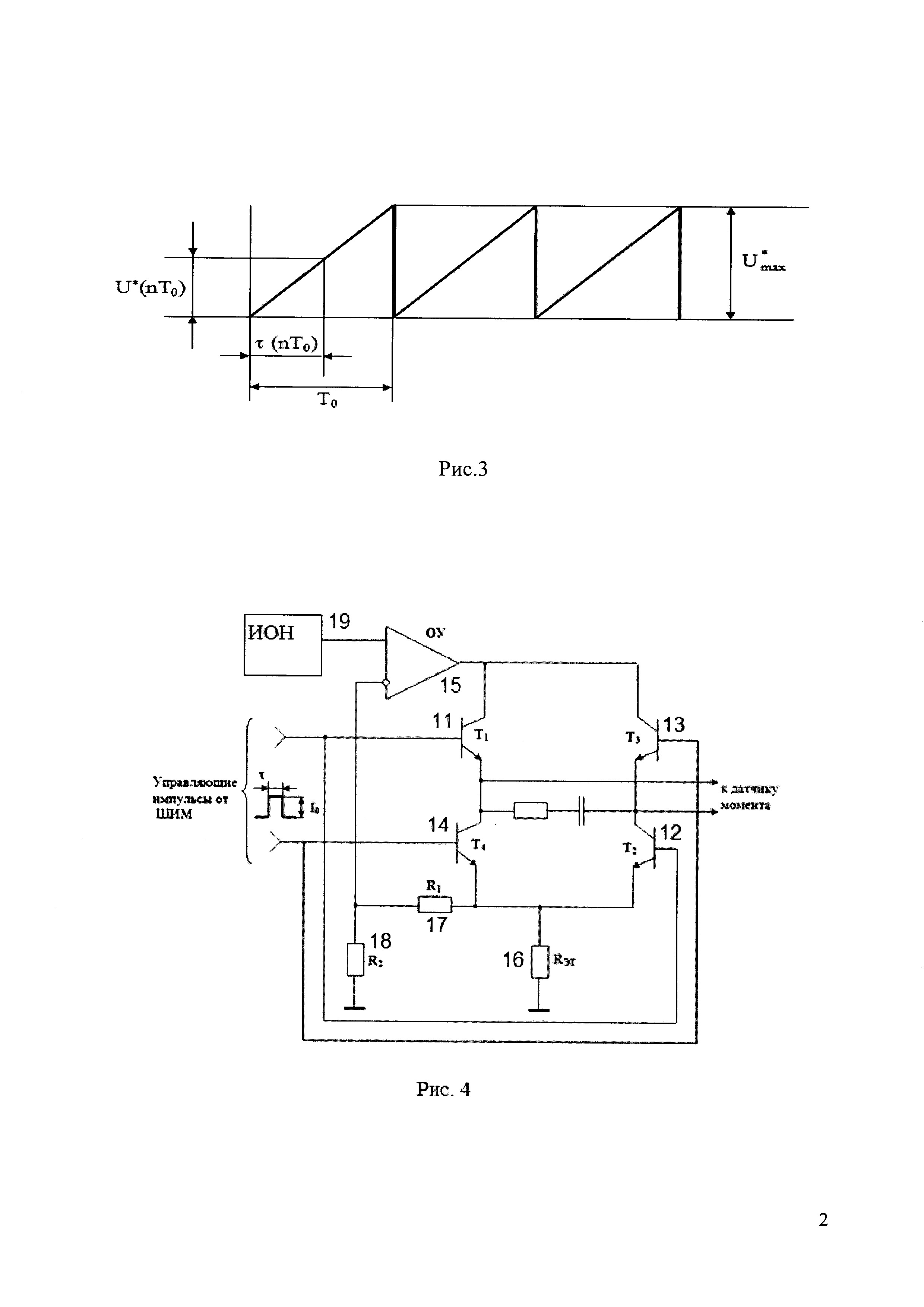
Физический смысл U*(nT0) и U*max может быть пояснен на рис. 3. Показана «цифровая пила», которую строит второй таймер микроконтроллера. Он выдает массив возрастающих цифровых кодов в зависимости от времени. Цифровой вычислитель преобразует напряжение на входе АЦП в кодовый уровень U*(nT0), в организованном программным образом сравнивающем устройстве микроконтроллера U*(nT0) сравнивается с «цифровой пилой» и отсекается момент времени, когда наступает равенство кода U*(nT0) и соответствующего цифрового значения кода на «пиле». Так формируется длительность импульса ШИМ. U*max - это максимальный цифровой уровень «цифровой пилы», которому соответствует длительность импульса τ(nT0), равная периоду дискретизации Т0.
1.2. Изготавливается опытный образец акселерометра.
На этапе изготовления измеряют напряжение Uyп на входе АЦП цифрового усилителя при отклонении чувствительного элемента до упора.
1.3. Выбирается коэффициент запаса кзап и определяется пороговое значение напряжения на входе АЦП Uпор=Uуп/кзап.
1.4. Вычисляется Крег=КДУ⋅КДМ⋅КЦУОС, для рассматриваемого примера КЦУОС=1
1.5. В память контроллера записывают:
- выбранное значение Uпop=Uуп/кзап,
- значение Крегmax,
- максимальное цифровое значение сигнала U*max для формирования последовательности импульсов на выходе ШИМ,
- значение коэффициента К* корректировки значения коэффициента передачи регулятора,
- программу, осуществляющую работу цифрового вычислителя контроллера в соответствии с разностным уравнением, в рассматриваемом примере - с алгоритмом (6),
- программу работы контроллера, в которой коэффициент передачи Крег(nT0) изменяется по закону (7). Изменение осуществляется за счет изменения КЦУОС - коэффициента передачи цифрового усилителя обратной связи,
- программу формирования ШИМ длительности τ(nT0) импульса постоянной амплитуды по закону τ(nT0)=[U*(nT0)/U*max]⋅T0.
1.6. В эксплуатации акселерометра программным способом система цифровой обратной связи выполняет следующие операции.
1.6.1. Обеспечивает измерение напряжения, поступающего с выхода предварительного усилителя на вход АЦП на каждом шаге дискретизации U(nT0).
1.6.2. Центральный вычислитель на каждом такте дискретизации nT0 по записанной в память программе, реализующей алгоритм - разностное уравнение, рассчитывает цифровой код IДМ(nT0), который соответствует среднему за период Т0 значению тока датчика момента, который, в свою очередь, пропорционален измеренному линейному ускорению.
Для расчета цифрового кода IДМ(nT0) используются его значения на предыдущих шагах IДМ[(n-1)Т0], IДМ[(n-2)Т0], а также значения напряжения на входе АЦП UДУ(nT0), UДУ[(n-1)Т0], UДУ[(n-2)Т0 с коэффициентами, записанными в разностном уравнении.
1.6.3. Микроконтроллер обеспечивает сравнение измеренного напряжения U(nT0) с Uпop.
1.6.4. Если U(nT0) меньше либо равно Uпop, то работа системы обратной связи обеспечена при значении коэффициента передачи, равном Крег.
1.6.5. Цифровой вычислитель формирует цифровой выходной сигнал U*(nT0), соответствующий измеренному сигналу U(nT0) на входе АЦП.
1.6.6. Сигналы U*(nT0) поступают на вход ШИМ, организованного внутри микроконтроллера.
1.6.7. ШИМ в соответствии с сигналом U*(nT0) формирует последовательность импульсов напряжения, амплитуда которых постоянна и близка к напряжению питания микроконтроллера, а длительность τ(nT0) определяется выражением:
1.6.8. Если на каком-то шаге дискретизации в условиях эксплуатации сигнал на входе АЦП U(nT0) становится больше Uпop, то автоматически осуществляется переход на работу системы обратной связи при значении коэффициента передачи, равном Крег+(|U(nT0)|-Uпop)⋅К*. При этом микроконтроллер на каждом последующем шаге дискретизации вычисляет разность |U(nT0)|-Uпоp, умножает вычисленную разность на К* и увеличивает значение коэффициента передачи на полученное значение. При этом полученное значение коэффициента передачи не должно превышать значения Крегmах. При этом обеспечивается форсированный возврат системы к значению величины напряжения на входе АЦП U(nT0), которое меньше либо равно Uпop.
Рассмотрим, как обеспечивается этот процесс.
Задача импульсов, поступающих с выхода ШИМ на вход усилителя мощности, только одна: обеспечить открытие переключателя тока усилителя мощности на промежуток времени, равный указанным строго регламентированным значениям τ(nT0). В усилителе мощности (рис. 4) переключатель тока реализован на транзисторах, обозначенных T1 (11), Т2 (12), Т3 (13), Т4 (14). Например, если управляющий импульс на входе усилителя мощности открыл транзисторы T1 и Т2, то от операционного усилителя (15), который входит в состав стабилизатора тока усилителя мощности, ток пойдет через транзистор T1, обмотку датчика момента акселерометра, транзистор Т2 и резисторы Rэт (16), R1 (17), R2 (18). Падение напряжение на резисторе R2 является напряжением обратной связи операционного усилителя. Операционный усилитель и резисторы Rэт, R1, R2 реализуют обратную связь и вместе с источником опорного напряжения (ИОН) (19) образуют стабилизатор тока. ИОН, предназначенный для подачи на вход операционного усилителя высокостабильного напряжения, и резисторы Rэт, R1, R2 выбираются с повышенными требованиями к стабильности. Например, в качестве ИОН выбрана микросхема AD780 со стабильностью напряжения 0,0005%, резисторы должны иметь стабильность 0,001%. Это обеспечивает высокостабильную амплитуду тока. Таким образом, на выходе усилителя мощности создаются импульсы тока, имеющие высоко стабильную амплитуду. При этом среднее значение тока за период дискретизации Т0 пропорционально измеряемому линейному ускорению в силу принципа действия акселерометра линейных ускорений, имеющего обратную связь, а именно mlg=кдмIос.
Таким образом, в момент времени, когда момент от маятниковости с учетом действующего линейного ускорения mlg станет равен моменту датчика момента kдмIос (kдм - крутизна характеристики датчика момента, Ioc - ток обратной связи), напряжение с датчика угла по окончании переходного процесса становится равным нулю. Система - в равновесии.
Рассмотрим пример работы акселерометра КХ67-041 с приведенными выше техническими характеристиками в условиях скачкообразного изменения в условиях эксплуатации линейного ускорения; выражением (6) задан алгоритм работы цифровой обратной связи акселерометра; в память контролера записан закон изменения коэффициента передачи (7). При проектировании акселерометра с цифровой обратной связью выбраны и записаны в память контроллера значения коэффициентов Крег=2,73⋅104, получаемый при КЦУОС=1, Крегmах=8,19⋅104, (при КЦУОСmах=3), выбранный из условия обеспечения запасов по амплитуде и фазе, соответственно, 6 дБ и 30°.
Для рассматриваемой конструкции акселерометра упоры расположены от среднего положения на углах ±6,8'. Выбран коэффициент запаса кзап=10. Напряжение на входе АЦП при отклонении маятника до упора Uуп=3,6 В.
С учетом выбранного коэффициента запаса появление на входе АЦП напряжения 0,36 В соответствует отклонению маятника на угол 0,68'. Поэтому выбрано значение порогового напряжения Uпop=0,36 В, которое записано в память контроллера.
В контроллер записана программа изменения коэффициента передачи в соответствии с законом (7).
Для того чтобы угол отклонения маятника не превысил ±6,8', при скачке линейного ускорения до 10g была выбрана величина К*=25.
Таким образом, определены параметры, определяющие работу системы с переменным коэффициентом передачи:
Крег=2,73⋅104 (КЦУОС=1); К*=25; Uпop=0,36 В; Крегmах=8,19⋅104 (КЦУОСmax=3).
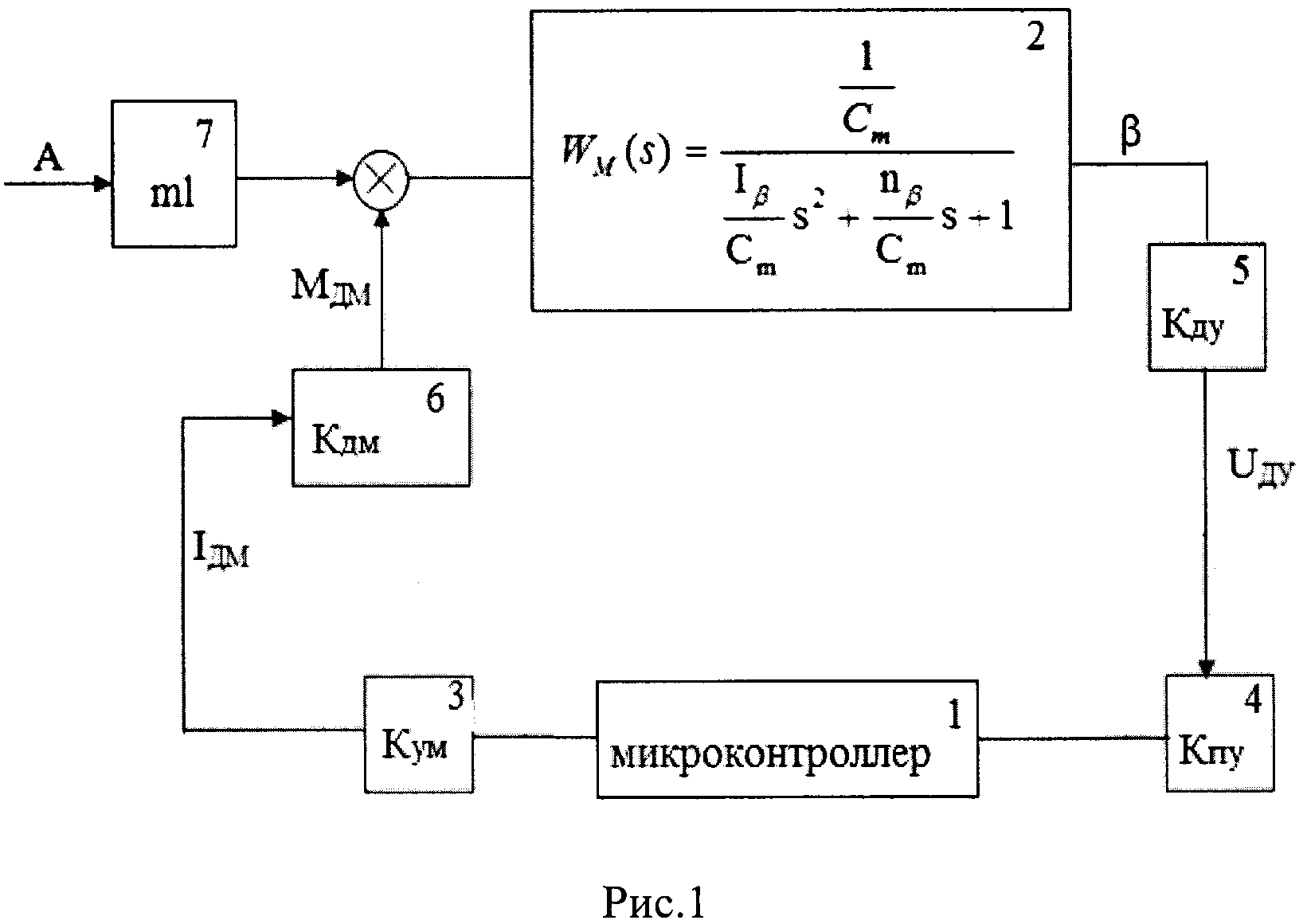
На рис. 5 представлены амплитудно-фазовые частотные характеристики замкнутой системы «акселерометр - цифровая обратная связь», построенные с использованием математической модели, включающей передаточную функцию (2) и алгоритм (6). Показано, что система обладает необходимыми запасами устойчивости, полоса пропускания составляет ~ 640 Гц, показатель колебательности не превышает 1,1, что близко к характеристикам КХ67-041 с аналоговым усилителем обратной связи.
Выполнено моделирование переходных процессов в акселерометре.
Моделирование акселерометра с цифровой обратной связью (ЦОС) показало следующее: есть переходный процесс по углу β в акселерометре с передаточной функцией аналоговой части (2) и ЦОС, работающей в соответствии с алгоритмом (6) при скачкообразном воздействии ускорения в 10g. По окончании переходного процесса угол β в астатической системе сходится к нулю, однако его максимальная величина достигла 4⋅10-3 рад=13,76' (моделирование проводилось при отсутствии «упоров», ограничивающих движение маятника). В реальном приборе КХ67-041 «упоры» ограничивают движение маятника углом ±6,8'.
Переходной процесс в акселерометре с «упорами». Возмущением, как и в первом случае, является скачок ускорения 10g. Произошел удар маятника об «упор». Это явление крайне нежелательное, т.к. может привести к разрушению маятника или, в лучшем случае, к некоторой потере выходной информации.
Предлагаемый способ обеспечения виброустойчивости акселерометра исключает такие явления.
Результаты моделирования акселерометра, для которого коэффициент передачи алгоритма (6) изменяется в соответствии с законом (7) при указанных выше численных значениях параметров:
Крег=2,73⋅104 (КЦУОС=1); К*=25; Uпop=0,36 B; Кpeгmax=8,19⋅104 (КЦУОСmax=3).
Появление на входе АЦП напряжения 0,36 В соответствует отклонению маятника на угол 0,68'. Согласно графику (3) благодаря реализации переменного коэффициента передачи ЦОС согласно соотношениям (7) при скачке ускорения 10g угол отклонения маятника не превысил 1,5⋅10-3 рад=5,16', т.е. маятник не коснулся упора.
Чувствительный элемент имеет конструкцию, полностью соответствующую конструкции прототипа.
Передаточная функция представленной схемы усилителя мощности равна:
Как видно из передаточной функции (9), для получения стабильной амплитуды импульсов тока датчика момента необходимо использование высокостабильного источника опорного напряжения UОП, высокостабильных сопротивлений R1, R2 и RЭТ. Активные элементы - операционный усилитель ОУ, транзисторы Т1-Т4 должны быть рассчитаны на ток, соответствующий диапазону измеряемых линейных ускорений, и обладать достаточным быстродействием: время включения-выключения, как правило, не должно превышать 100 нс.
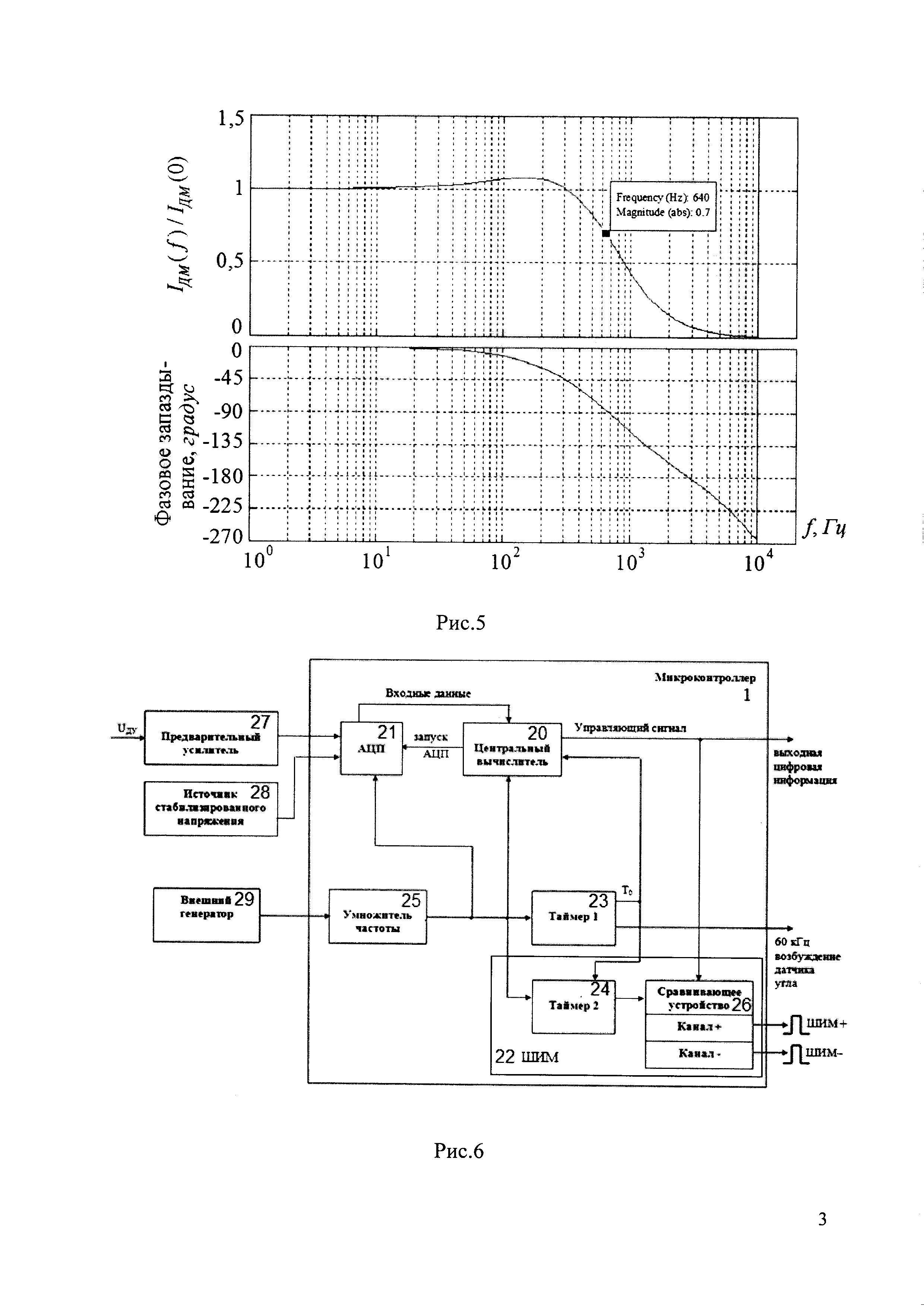
На рис. 6- структурная схема микроконтроллера.
Микроконтроллер (1), помимо центрального вычислителя (процессора) (20), имеет периферию, т.е. кристаллы, на которых выполнены следующие элементы: АЦП (21), ШИМ (22), первый таймер (23) и второй таймер (24), умножитель частоты (25), сравнивающее устройство (26). ШИМ образуют второй таймер и сравнивающее устройство.
Акселерометр с цифровой обратной связью работает следующим образом. При действии ускорения вокруг оси торсиона акселерометра создается момент, с датчика угла напряжение поступает на предварительный усилитель (27), с предварительного усилителя на АЦП. С источника стабилизированного напряжения (28) на АЦП подается напряжение питания. Внешний генератор (29) запускает умножитель частоты микроконтроллера. В реализованном на предприятии макетном образце внешний генератор выдает 10 мГц, а умножитель частоты формирует 80 мГц. Эта частота является синхрочастотой и подается на АЦП, на вход центрального вычислителя, на первый и второй таймеры. Центральный вычислитель запускает АЦП и с выхода АЦП принимает данные в цифровых кодах UДУ(nT0), UДУ[(n-1)Т0], UДУ[(n-2)Т0. В центральный вычислитель записаны все перечисленные выше программы и числовые данные по параметрам К*, кзап, Uпop, U*max, Крегmах. Первый таймер формирует период дискретизации Т0 и подает его в центральный вычислитель. На акселерометр первый таймер подает частоту возбуждения датчика угла. Центральный вычислитель на каждом такте дискретизации nT0 по записанной в память программе, реализующей алгоритм - разностное уравнение, рассчитывает цифровой код IДМ(nT0), который соответствует среднему за период Т0 значению тока датчика момента, который, в свою очередь, пропорционален измеренному линейному ускорению (для расчета цифрового кода IДМ(nT0) используются его значения на предыдущих шагах IДМ[(n-1)Т0], IДМ[(n-2)Т0], а также значения UДУ(nT0), UДУ[(n-1)Т0], UДУ[(n-2)Т0 с коэффициентами, записанными в разностном уравнении); этот цифровой код преобразуется в цифровую выходную информацию (унитарный код, RS-стандарт, Манчестер …) и подается в систему управления изделием, на котором установлен акселерометр).
В центральном вычислителе на каждом шаге дискретизации напряжение U(nT0), поступающее на вход АЦП, после преобразования в код, сравнивается с Uпор. При напряжениях, меньших либо равных Uпop, формируется цифровой сигнал U*(nT0) для ШИМ, соответствующий значению коэффициента передачи Крег, и длительность импульсов в сравнивающем устройстве равна τ(nT0)=[U*(nT0)/U*max]⋅T0.
Центральный вычислитель определяет тот шаг дискретизации, на котором U(nT0) больше Uпop и обеспечивает на последующих шагах дискретизации формирование увеличенного дискретного сигнала U*(nT0)ув для ШИМ, одновременно рассчитывается новое значение коэффициента передачи регулятора, равное Крег+(|U(nT0)|-Uпор)⋅К*, что обеспечивает увеличение длительности импульсов на выходе ШИМ до величины τ(nT0)ув=[U*(nT0)ув/U*max]⋅T0.
Аналогично, на том шаге дискретизации, на котором U(nT0) становится меньше Uпop, обеспечивается возврат к значению коэффициента передачи Крег.
Сформированный цифровой сигнал U*(nT0) для ШИМ передается на сравнивающее устройство, на которое второй таймер подает сформированную «цифровую пилу».
В сравнивающем устройстве выполняется сравнение кода U*(nT0) со значениями «цифровой пилы» и отсекается момент времени, когда наступает равенство кода U*(nT0) и соответствующего цифрового значения кода на «пиле». Так формируется длительность импульса ШИМ. По каналу плюс или минус (в зависимости от знака измеренного линейного ускорения) эти импульсы определенной длительности поступают на входы усилителя мощности, в котором амплитуда импульсов стабилизируется и поступает в обмотку датчика момента акселерометра.
Таким образом, заявлены:
1. Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью, заключающийся в том, что используют маятниковый акселерометр, в цифровой обратной связи которого устанавливают значения периода дискретизации Т0 работы широтно-импульсного модулятора (ШИМ), маятниковости акселерометра, коэффициента демпфирования, коэффициента передачи регулятора Крег, обеспечивающие минимальную динамическую ошибку акселерометра при действии вибраций с максимальным заданным значением амплитуды линейного ускорения. Отличительная особенность заключается в том, что измеряют напряжение Uyп на входе АЦП цифрового усилителя при отклонении чувствительного элемента до упора, записывают в память контроллера: пороговое напряжение Uпop: Uпop=Uyп/кзап, где кзап - коэффициент запаса; значение коэффициента передачи регулятора Крегmах, при котором при выбранных параметрах обеспечивается устойчивость системы с минимально допустимыми запасами по амплитуде и фазе, цифровой код уровня сигнала на входе ШИМ U*max, при котором длительность импульса τ(nT0), где n - целое число, равна периоду дискретизации Т0, значение коэффициента К* корректировки значения коэффициента передачи регулятора Крег, при эксплуатации акселерометра обеспечивают изменение значения коэффициента передачи регулятора в микроконтроллере от Крег до Крегmах по закону

для чего на каждом шаге дискретизации выполняют измерение и сравнение в микроконтроллере напряжения U(nT0) на входе АЦП усилителя со значением Uпop; при значениях напряжений U(nT0), меньших либо равных Uпop, для организованного внутри микроконтроллера ШИМ формируют в микроконтроллере цифровой входной сигнал U*(nT0), соответствующий текущему значению напряжения U(nT0) при значении коэффициента передачи регулятора Крег; обеспечивают формирование ШИМ последовательности импульсов постоянной амплитуды и длительностью τ(nT0)=[U*(nT0)/U*max]⋅T0; определяют в микроконтроллере тот шаг дискретизации, на котором U(nT0) больше Uпop,обеспечивают на последующих шагах дискретизации формирование в микроконтроллере увеличенного цифрового сигнала U*(nT0)ув для ШИМ, соответствующего значению коэффициента передачи Крег+(|U(nT0)|-Uпop)⋅К*, что обеспечивает увеличение длительности импульсов на выходе ШИМ до величины τ(nT0)ув=[U*(nT0)ув/U*max]⋅T0; обеспечивают соответствующее увеличение длительности открытого состояния, определяемого величиной τ(nT0)ув, переключателя тока усилителя мощности, что обеспечивает поступление с выхода усилителя мощности в обмотку датчика момента акселерометра последовательности импульсов тока стабилизированной амплитуды и увеличенной длительности, определяют тот шаг дискретизации, на котором на входе АЦП напряжение U(nT0) меньше либо равно Uпop, после чего обеспечивают возврат системы обратной связи к режиму работы со значением коэффициента передачи равным Крег.
2. Виброустойчивый маятниковый акселерометр с цифровой обратной связью, включающий маятниковый чувствительный элемент, емкостной датчик угла, магнитоэлектрический датчик момента, цифровой усилитель обратной связи, включающий предварительный усилитель, преобразователь напряжение - временной интервал, внешний генератор и усилитель мощности, включающий переключатель тока и стабилизатор тока, при этом датчик угла, цифровой усилитель обратной связи и датчик момента соединены последовательно. Отличительная особенность заключается в том, что преобразователь напряжение - временной интервал выполнен в виде микроконтроллера, в котором реализованы АЦП, центральный вычислитель, умножитель частоты, первый таймер (Т1), формирующий тактовую частоту, широтно-импульсный модулятор, образованный вторым таймером (Т2) и сравнивающим устройством, при этом входом микроконтроллера является первый вход АЦП, второй вход АЦП соединен с источником стабилизированного напряжения, вход умножителя частоты соединен с выходом внешнего генератора, выход умножителя частоты соединен с третьим входом АЦП, вторым входом центрального вычислителя, входом Т1 и первым входом Т2; первый выход центрального вычислителя соединен с четвертым входом АЦП, а выход АЦП соединен с первым входом центрального вычислителя; первый выход Т1 соединен с третьим входом центрального вычислителя и вторым входом Т2; выход Т2 соединен с первым входом сравнивающего устройства, второй выход центрального вычислителя соединен с вторым входом сравнивающего устройства и является выходом микроконтроллера, выдающим в цифровом виде информацию об измеренном линейном ускорении; второй выход Т1 соединен с обмоткой возбуждения датчика угла акселерометра; выход сравнивающего устройства, формирующего импульсы напряжения, соединен с входом усилителя мощности.
Литература:
1. Коновалов С.Ф. Теория виброустойчивости акселерометров. - М.: Машиностроение, 1991 г.
2. С.М. Федоров, А.П. Литвинов. Автоматические системы с цифровыми управляющими машинами. – М., Л.: Энергия, 1965.
3. Бессекерский В.А, Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1966.

Многоканальный преобразователь напряжений в шим-сигналы
Универсальный широкодиапазонный стенд для контроля измерителей угловой скорости
Способ производства горячекатаного проката повышенной прочности
Волоконно-оптический измеритель угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Приемопередатчик последовательного интерфейса с элементом гальванической развязки
Стенд для измерения вибрационных реактивных моментов гиромотора
Термоинвариантный измеритель линейного ускорения
Формирователь временных интервалов
Многоканальный преобразователь напряжений в шим-сигналы
Универсальный широкодиапазонный стенд для контроля измерителей угловой скорости
Способ производства горячекатаного проката повышенной прочности
Волоконно-оптический измеритель угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Приемопередатчик последовательного интерфейса с элементом гальванической развязки
Стенд для измерения вибрационных реактивных моментов гиромотора
Термоинвариантный измеритель линейного ускорения
Формирователь временных интервалов

