СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к локационным способам и средствам измерения глубин морских акваторий с помощью эхолотов.
Эхолокация дна моря относится к виду локационных измерений, в которых излучаемое «наблюдателем» электромагнитное поле звукового диапазона воздействует на объект наблюдения и, отражаясь от поверхности дна, возвращается к «наблюдателю». Наблюдатель по измерению времени, затраченному на перемещение сигнала между наблюдателем и поверхностью дна, и оценке скорости распространения звуковых колебаний в воде вычисляет расстояние между ними. Использование ряда измерителей, находящихся на известной базе, или сканирующего излучателя позволяет измерять глубины, расположенные на траверсе движения судна по ширине облучения (И.И. Федоров. Эхолоты и другие гидроакустические средства. Курс кораблевождения. Книга 4. Л.: Упр. Начальника гидрографической службы ВМФ. 1960 г. - 360 с. [1], А.А. Хребтов. Судовые эхолоты. Л.: Судостроение. 1982. - 232 с. [2], В.И. Каевицер и др. «Дистанционные акустические измерения плотности трехмерной среды на основе фазовых измерений эхосигналов // VI Российская научно-техническая конференция «Современное состояние и проблемы навигации и океанографии» НО-2007, с. 335-338 [3], авторское свидетельство SU №1829019 А1, 23.07.1993 [4], авторское свидетельство SU №472315 А1, 30.05.1975 [5], патент RU №2272303 С1, 20.03.2006 [6], патент CN №2852285 Y, 27.12.2006 [7], патент JP №6300840 А, 28.10.1994 [8]).
Модель измерения глубин по результатам измерений времени рассматривается в системе координат Декарта XYZ, численное решение которой выполняется итерационными способами, один из которых интерферометрический [3]. Это указывает на то, что существующие модели локационных измерений используют ряд допущений, вызывающих трансформируемые погрешности, а существующие способы локационных измерений, построенные на этих моделях, являются приближенными.
Метрическое обеспечение измерений глубин строится на выделении отдельных точек-глубин под судном, соединении их прямыми линиями с излучателем-приемником и их масштабировании. Однако перед выполнением этих операций необходимо доказать, что реальная линия движения электромагнитного поля, соединяющая указанные точки, является прямой. Это положение не доказывается, а допускается, что приводит к первой трансформируемой методической погрешности измерений.
Вторая методическая погрешность измерения глубин связана со скоростью прохождения звука в слоях воды [1]. Для определения скорости звука в слоях воды используют специальное устройство, выполняющее дискретные измерения в отдельных точках на площади съемки. Однако скорость распространения звука в воде зависит от времени и координат. Поэтому разнесение по времени и пространству определений глубины и скорости звука не исключает погрешность и не устраняет ее зависимость от времени и координат, а только уменьшает ее. Это вторая трансформируемая погрешность.
Известен эхолот [1, 2] для осуществления способа определения глубин в точке облучения дна, содержащий излучатель поля по заданным направлениям, приемник для приема отраженного от дна сигнала, измеритель длительности сигнала, опорный генератор и вычислитель с регистратором, при этом выходы излучателя, приемника и опорного генератора подключены к входам измерителя длительности, выход которого подключен к вычислителю.
Основным недостатком известного способа измерения глубин и эхолота является недостаточно высокая точность, обусловленная изменениями скорости распространения электромагнитного поля из-за влияния среды и ограничений угла сканирования пространства из-за роста погрешности боковых измерений. В результате погрешность определения расстояния от объекта до источника электромагнитного поля при использовании известных способа и эхолота достигает величин, превышающих требования. Ограничения по углу сканирования пространства уменьшает производительность и увеличивает стоимость промерных работ.
Известны также технические решения, направленные на повышение точности измерения глубин посредством эхолота.
В известном решении (патент RU №2241242 С1, 27.11.2004 [9]) задачей изобретения является повышение точности измерения за счет снижения погрешностей, обусловленных шумами и конечным значением крутизны фронта эхо-сигнала.
Для решения поставленной задачи в эхолот, содержащий последовательно соединенные микроконтроллер, передатчик, приемник и аналого-цифровой преобразователь, выход которого соединен с микроконтроллером, а также электроакустический преобразователь, подключенный к передатчику и приемнику, и дисплей, вход которого подключен к микроконтроллеру, введены блок временной автоматической регулировки усиления, вход которого соединен с микроконтроллером, а передатчик выполнен со ступенчатой регулировкой мощности, вход регулировки которой подключен к микроконтроллеру, приемник выполнен с двумя входами регулировки усиления, первый вход регулировки, обеспечивающий ступенчатую регулировку усиления, подключен к микроконтроллеру, а второй вход регулировки подключен к выходу блока временной автоматической регулировки усиления.
Задачей также известного технического решения является расширение эксплуатационных возможностей эхолокационной системы, использующей генератор зондирующих сигналов (патент RU №2362184 С1, 20.07.2009 [10]).
При этом технический результат изобретения заключается в том, что генератор зондирующих сигналов вырабатывает радиоимпульсы (зондирующие сигналы) с постоянной начальной фазой.
Для чего в генератор зондирующих сигналов, содержащий синхронизатор, импульсный генератор, генератор синусоидального сигнала, аналоговый ключ и усилитель мощности, при этом выход синхронизатора соединен с входом импульсного генератора, выход генератора синусоидальных колебаний - с аналоговым ключом, а его выход - с входом усилителя мощности, дополнительно введены компаратор и D-триггер, D-вход триггера соединен с выходом импульсного генератора, С-вход с выходом генератора синусоидального сигнала, выход триггера соединен с управляющим входом аналогового ключа.
Технической задачей, на решение которой направлено изобретение (патент RU №2523101 С2, 20.07.2014 [11]), является обеспечение универсальности закона ВАРУ (временной автоматической регулировки усиления), а также повышение помехозащищенности и надежности эхолота и расширение его функциональных возможностей за счет возможности привязки результатов измерения к географическим координатам места его применения.
При этом технический результат достигается тем, что в известный эхолот введены приемник сигналов спутниковых радионавигационных систем, выход которого соединен с третьим входом ЭВМ, усилитель мощности, вход которого соединен с третьим выходом ЭВМ, и переключатель «прием-передача», вход которого соединен с выходом усилителя мощности, вход-выход - с входом-выходом электроакустического преобразователя, управляющий вход - с четвертым выходом ЭВМ, а выход - с сигнальным входом приемника акустических эхо-сигналов, при этом приемник акустических эхо-сигналов выполнен с одним входом управления.
Для достижения технического результата в известный эхолот, содержащий электронно-вычислительную машину (ЭВМ), устройство отображения информации (дисплей), вход которого соединен с первым выходом ЭВМ, электроакустический преобразователь, приемник акустических эхо-сигналов, вход управления которого соединен со вторым выходом ЭВМ, и аналого-цифровой преобразователь, вход которого соединен с выходом приемника акустических эхо-сигналов, а выход соединен с первым входом ЭВМ, введены приемник сигналов спутниковых радионавигационных систем, выход которого соединен со вторым входом ЭВМ, усилитель мощности, вход которого соединен с третьим выходом ЭВМ, и переключатель «прием-передача», вход которого соединен с выходом усилителя мощности, вход-выход - с входом-выходом электроакустического преобразователя, управляющий вход - с четвертым выходом ЭВМ, а выход - с сигнальным входом приемника акустических эхо-сигналов, при этом приемник акустических эхо-сигналов выполнен с одним входом управления.
Известные технические решения [9-11] обеспечивают повышение точности измерения глубины за счет усовершенствования отдельных схемных решений, однако эти нововведения не позволяют уменьшить погрешности, обусловленные нелинейностью измеряемой водной среды, а также уменьшить ограничения по углу сканирования эхолота.
Решаемой задачей также известного технического решения (патент RU №2431154 С1, 10.10.2011 [12]) является повышение точности измерения глубин при снятии ограничений по углу сканирования эхолота.
Решение данной задачи достигается тем, что в известном способе определения расстояния от объекта до источника электромагнитного поля путем излучения электромагнитного поля звукового диапазона в направлении дна, приема отраженного сигнала, измерения промежутка времени между моментом излучения до момента приема сигнала и вычисления по полученным результатам глубины измеряют промежутки времени приема сигнала в двух точках, расположенных на известном отстоянии по вертикали, фиксируя их по двум любым совпадающим отличиям в форме сигналов, например экстремальным значениям, а глубину (Н) вычисляют по формуле:
где Н - глубина точки облучения дна от первого измерителя;
d - отстояние по вертикали между точками измерений;
t1, t2 - промежутки времени между моментом излучения до момента приема сигналов в точках измерений по совпадающим отличиям в форме сигналов, а эхолот для реализации способа содержит излучатель поля по заданным направлениям, приемник, для приема отраженного от дна сигнала, измеритель длительности между излучением и приемом сигнала, опорный генератор и вычислитель с регистратором, при этом выходы излучателя, приемника и опорного генератора подключены к входам измерителя длительности, выход которого подключен к вычислителю, приемник снабжен двумя антеннами, расположенными по вертикали на известной базе d и подключенными к измерителю длительности, снабженному дискриминатором особых точек сигнала, база приемных антенн установлена вертикально на стабилизированной платформе, а частотой опорного генератора управляют в зависимости от измеряемой глубины и требуемой точности ее измерений по формуле:
где F - частота опорного генератора;
V - средняя скорость распространения звука в воде;
Н, Δ - глубина и требуемая погрешность ее измерения.
Данный способ реализуется посредством эхолота, который содержит излучатель, приемный блок, блок измерения длительности, опорный генератор, вычислительный блок с регистратором.
При этом выходы излучателя, приемного блока и опорного генератора подключены к входам блока измерения длительности, выход которого подключен к входу вычислителя для определения глубины в точке падения луча излучателя электромагнитного поля.
Излучатель выполнен в виде элемента, допускающего излучение электромагнитного поля заданного частотного диапазона, требуемой мощности, с требуемой диаграммой направленности в заданном плоскостном, сканирующем угле. Излучатель установлен в известном положении относительно базы приемного устройства, а его выход подключен к блоку измерения длительности.
Приемный блок выполнен в виде жесткой базы, заданной по вертикали длины d, на концах которой закреплены приемные антенны, например магнитострикционные. База закреплена на стабилизированной в горизонте платформе, в качестве которой может быть использован карданов подвес. Выходы антенн соединены с приемоизмерительным блоком, выход которого подключен к блоку измерения длительности.
Блок измерения длительности включает устройство линейной развертки и дискриминатор.
Такое решение задачи позволяет если не полностью исключить первую методическую трансформируемую погрешность, то существенно ее уменьшить.
Однако и известное техническое решение [12] не позволяет уменьшить погрешности, обусловленные нелинейностью измеряемой водной среды, ввиду того, что для вычисления глубин используют усредненную скорость распространения звука в воде по всему горизонту и площади измерений, несмотря на использование двух разнесенных по вертикали на заданное расстояние приемных антенн.
Задачей предлагаемого технического решения является повышение достоверности измерения глубин посредством эхолота.
Поставленная задача решается за счет того, что в способе определения расстояния от объекта до источника электромагнитного поля путем излучения электромагнитного поля звукового диапазона в направлении дна, приема отраженного сигнала, измерения промежутка времени между моментом излучения до момента приема сигнала и вычисления по полученным результатам глубины посредством эхолота, дополнительно измеряют скорость звука в диапазоне 1400-1600 м/с, с разрешением 0,001 м/с на горизонте установки излучателя и приемной антенны, а также на n-горизонтах по глубине в фиксированных точках, включая придонный горизонт, посредством профилографа скорости звука, установленного на автономном аппарате типа «SONOBOT», при этом также измеряют температуру воды, гидростатическое давление, электропроводность и соленость морской воды в тех же фиксированных точках, в которых измеряют скорость звука, а в эхолот для осуществления способа определения глубин в точке облучения дна, содержащий излучатель, приемник для приема отраженного от дна сигнала, измеритель длительности, опорный генератор и вычислитель с регистратором, при этом выходы излучателя, приемника и опорного генератора подключены к входам измерителя длительности, выход которого подключен к вычислителю, антенна приемника эхолота подключена к измерителю длительности, снабженному дискриминатором особых точек сигнала, а частотой опорного генератора управляют в зависимости от измеряемой глубины и требуемой точности ее измерений, введен блок выработки поправок на скорость звука на n-горизонтах, соединенный с профилографом скорости звука и датчиками измерения гидростатического давления, температуры, электропроводности и солености на n-горизонтах, информационно соединенный с вычислителем.
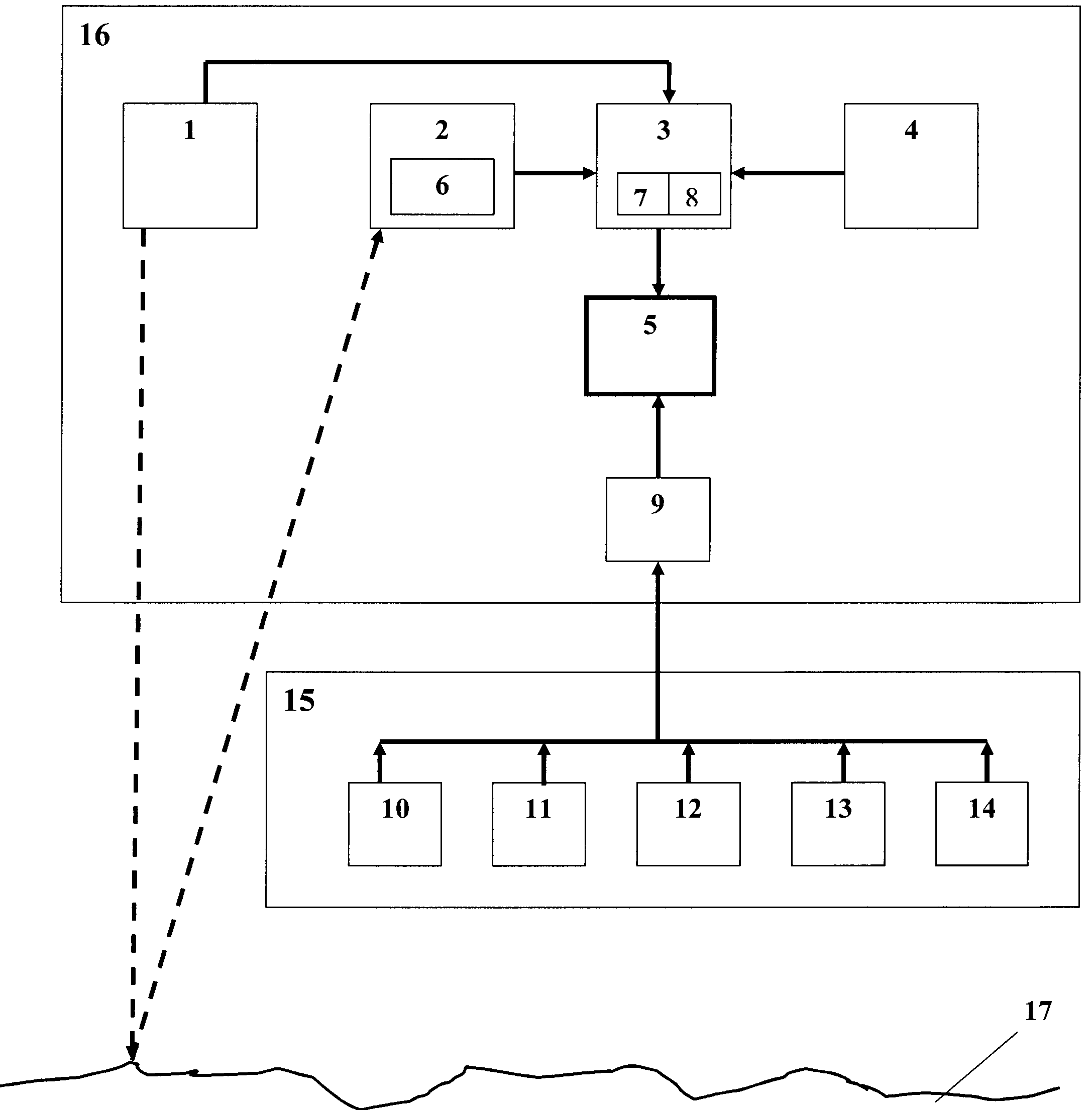
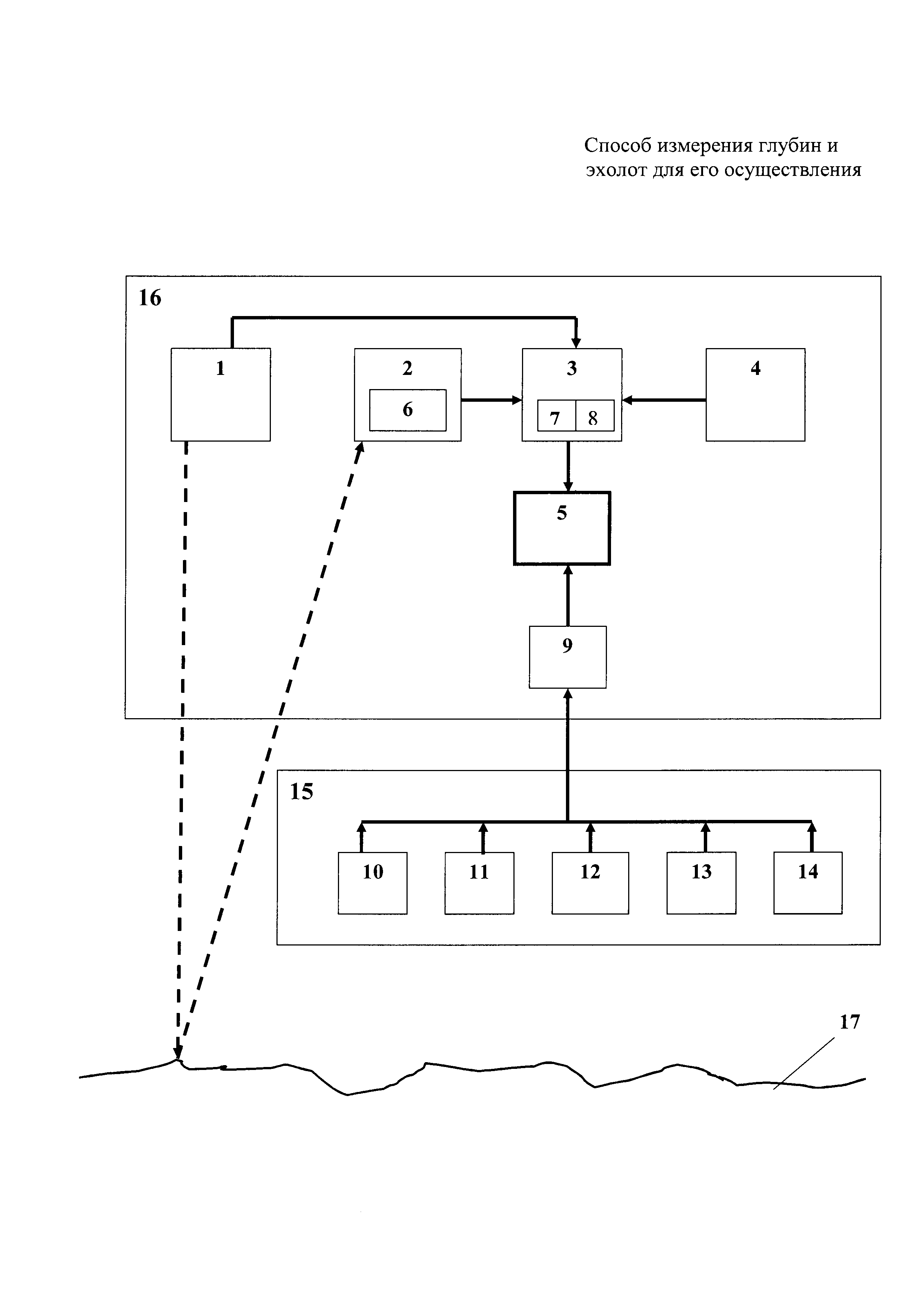
Сущность предлагаемого технического решения поясняется чертежом (фигура), на котором приведена структурная блок-схема эхолота.
Эхолот содержит излучатель 1, приемный блок 2, блок измерения длительности 3, опорный генератор 4, вычислительный блок с регистратором 5.
При этом выходы излучателя 1, приемного блока 2 и опорного генератора 4 подключены к входам блока измерения длительности 3, выход которого подключен к входу вычислителя 5 для определения глубины в точке падения луча излучателя электромагнитного поля.
Излучатель выполнен в виде элемента, допускающего излучение электромагнитного поля заданного частотного диапазона, требуемой мощности, с требуемой диаграммой направленности в заданном плоскостном, сканирующем угле. Излучатель установлен в известном положении относительно базы приемного устройства, а его выход подключен к блоку измерения длительности 3.
Приемный блок 2 содержит приемную антенну 6, например магнитострикционную. Выход антенны 6 соединен с приемоизмерительным блоком 2, выход которого подключен к блоку измерения длительности 3.
Блок измерения длительности 3 включает устройство линейной развертки 7 и дискриминатор 8. Вычислитель 5 соединен с выходом блока 9 выработки поправок на скорость звука на n-горизонтах, соединенный своими входами с профилографом скорости звука 10 и датчиками гидростатического давления 11, температуры 12, электропроводности 13 и солености 14 на n-горизонтах, установленных на автономном аппарате 15 типа «SONOBOT», который выполнен с возможностью погружения и всплытия и соединен гидроакустическим каналом связи с носителем (судном) 16 эхолота. Позицией 17 показано морское дно.
При промышленной реализации применены следующие измерительные датчики.
Профилограф скорости звука в диапазоне 1400-1600 м/с, с разрешением 0,001 м/с и точностью ±0,3 м/с. Диапазон измерения температуры от -5 до 35 град С, точность ±0,01 град С, давление в диапазоне 10, 50,100, 300 или 600 бар.
Датчик электропроводности - индуктивная ячейка.
Датчик температуры - термистор. Датчик давления - прецизионный кремний. Программное обеспечение DataLog Express Windows для выбора режимов работы, скачивания и отображения данных.
Измерения проводятся в фиксированной точке, а также путем профилирования по глубине (вертикали).
Автономный аппарат представляет собой аппарат для гидрографических измерений типа «SONOBOT» (www.GEO-DV.de) и управляется с судна 16 по гидроакустическому каналу связи.
Эхолот работает следующим образом.
Электромагнитное поле звукового диапазона излучается в заданном направлении, заданном плоскостью сканирования Z0Y. В момент посылки сигнала излучатель 1 выдает сигнал в блок измерения длительности 3.
Электромагнитное поле, воздействуя на поверхность дна, отражается. При этом из-за различных свойств грунта форма отраженного сигнала искажается. Отраженный сигнал может распространяться по любой произвольной траектории к приемной антенне 6. Траектории движения лучей, отраженных от дна и идущих к антенне 6, могут быть произвольными, но они имеют две составляющие по осям Y и Z.
Излучение электромагнитного поля в направлении дна осуществляется импульсами, а отраженный сигнал имеет множество искажений, вызванных особенностями облучаемой поверхности. При этом передний фронт отраженного импульса не всегда характерно выражен. В блоке измерения длительности 3 принимаемые сигналы с помощью устройства линейной развертки 7 отображаются на линии развертки совместно с метками опорного генератора. Если принимаемые антенной 6 сигналы
совпадают по форме и отличаются только временем прихода, то дискриминатор 8 выделяет их характерные особые точки, которые служат границами прихода сигналов, например, методом их дифференцирования.
В процессе измерения глубины, посредством эхолота, также измеряют скорость звука в диапазоне 1400-1600 м/с, с разрешением 0,001 м/с на горизонте установки излучателя и приемной антенны, а также на n-горизонтах по глубине в фиксированных точках, включая придонный горизонт, посредством профилографа скорости звука, установленного на автономном аппарате типа «SONOBOT», при этом также измеряют температуру воды, соленость, гидростатическое давление в диапазоне 10, 50, 100, 300 и 600 бар и электропроводность в тех же фиксированных точках, в которых измеряют скорость звука. Измеренные параметры по гидроакустическому каналу связи между автономным аппаратом 15 и носителем (судном) 16 эхолота поступают на блок 9 выработки поправок на скорость звука на n-горизонтах, в котором рассчитывается скорость звука с учетом температуры воды, солености, гидростатического давления, электропроводности в тех же фиксированных точках, в которых измеряют скорость звука.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартные устройства, оборудование и приспособления, используемые для измерения электромагнитных полей.
Источники информации
1. И.И. Федоров. Эхолоты и другие гидроакустические средства. Курс кораблевождения. Книга 4. Ленинград: Упр. Начальника гидрографической службы ВМФ. 1960 г. - 360 с.
2. А.А. Хребтов. Судовые эхолоты. Л.: Судостроение. 1982. - 232 с.
3. В.И. Каевицер и др. «Дистанционные акустические измерения плотности трехмерной среды на основе фазовых измерений эхосигналов // VI Российская научно-техническая конференция «Современное состояние и проблемы навигации и океанографии» НО-2007, с. 335-338.
4. Авторское свидетельство SU №1829019 А1, 23.07.1993.
5. Авторское свидетельство SU №472315 А1, 30.05.1975.
6. Патент RU №2272303 С1, 20.03.2006.
7. Патент CN №2852285 Y, 27.12.2006.
8. Патент JP №6300840 А, 28.10.1994.
9. Патент RU №2241242 С1, 27.11.2004.
10. Патент RU №2362184 С1, 20.07.2009.
11. Патент RU №2523101 С2, 20.07.2014.
12. Патент RU №2431154 С1, 10.10.2011.
Способ измерения сверхмалой высоты полета самолета преимущественно гидросамолета, над водной поверхностью и параметров морского волнения
Способ определения и построения пространственного распределения океанографических характеристик и система для его реализации
Буй для определения характеристик морских ветровых волн
Подводный робототехнический комплекс
Способ измерения высоты морских волн с борта движущегося судна
Подводная станция
Способ акустического мониторинга изменчивости параметров морских акваторий
Навигационный комплекс подвижного объекта
Способ навигации автономного необитаемого подводного аппарата
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ измерения сверхмалой высоты полета самолета преимущественно гидросамолета, над водной поверхностью и параметров морского волнения
Способ определения и построения пространственного распределения океанографических характеристик и система для его реализации
Буй для определения характеристик морских ветровых волн
Подводный робототехнический комплекс
Способ измерения высоты морских волн с борта движущегося судна
Подводная станция
Способ акустического мониторинга изменчивости параметров морских акваторий
Навигационный комплекс подвижного объекта
Способ навигации автономного необитаемого подводного аппарата
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов

