Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ
Вид РИД
Изобретение
Изобретение относится к области управления угловым движением космических аппаратов (КА) с силовыми гироскопами (СГ) и поворотными солнечными батареями (СБ).
Известен способ формирования управляющих воздействий на КА с СГ и поворотными СБ (Патент RU 2196710 С2. МКИ B64G 1/28, 1/44 / Богачев А.В., Ковтун B.C., Платонов В.Н. Способ формирования управляющих моментов на космический аппарат с силовыми гироскопами и поворотными солнечными батареями и система для его осуществления// Изобретения 2003. №2) [1], который включает в себя измерение вектора абсолютной угловой скорости ΚΑ  , измерение вектора кинетического момента
, измерение вектора кинетического момента  в системе СГ, определение по измеренным значениям и суммарного вектора кинетического момента
в системе СГ, определение по измеренным значениям и суммарного вектора кинетического момента  , измерение единичного вектора направления на Солнце
, измерение единичного вектора направления на Солнце  . По измеренному значению определяют время формирования на КА вектора управляющего момента от сил светового давления путем разворота СБ. При этом одновременно с формированием указанного управляющего момента, формируют противоположно направленный стабилизирующий момент от системы СГ, уменьшающий величину накопленного кинетического момента системы.
. По измеренному значению определяют время формирования на КА вектора управляющего момента от сил светового давления путем разворота СБ. При этом одновременно с формированием указанного управляющего момента, формируют противоположно направленный стабилизирующий момент от системы СГ, уменьшающий величину накопленного кинетического момента системы.
Таким образом, на определенном интервале, за счет противоположной направленности вектора управляющего момента от сил светового давления, вектору накопленного суммарного кинетического момента , обеспечивается разгрузка СГ. Применение предлагаемого способа позволяет уменьшить расход топлива на выполнение разгрузки СГ с использованием реактивных двигателей (РД). Сэкономленное топливо можно использовать для других целей, связанных с продлением срока активного существования КА на орбите и последующего его увода на орбиту захоронения.
Недостаток способа заключается в том, что при развороте СБ не учитывается предельно допустимая разница между током, генерируемым батареями, и потребляемым на борту. Тем самым не гарантируется энергообеспечение бортовых потребителей от СБ. Кроме того, способ учитывает управляющие воздействия и движение только относительно центра масс КА и при этом не учитывает движение центра масс КА, которые происходят одновременно под действием сил светового давления. При этом «потери» характеристической скорости, вызванные неуправляемым приложением указанной управляющей силы от СБ, могут приводить к необходимости проведения дополнительной коррекции орбиты (в рассматриваемом примере, для удержания КА в рабочей точке по долготе на геостационарной орбите (ГСО). Для выполнения коррекции орбиты может потребоваться дополнительный расход топлива РД.
Известен другой способ формирования управляющих воздействий на КА с СГ и поворотными СБ (Патент RU 2207969 С2. МКИ B64G 1/28, 1/44 / Богачев А.В., Земсков Е.Ф., Ковтун B.C., Орловский И.В., Платонов В.Н., Соколов А.В., Улыбышев Ю.П. Способ формирования управляющих воздействий на космический аппарат с силовыми гироскопами и поворотными солнечными батареями // Изобретения 2003. №19) [2], в котором устранены указанные недостатки. В данном способе - прототипе, производят измерение вектора абсолютной угловой скорости космического аппарата , формирование управляющих воздействий на космический аппарат силовыми гироскопами, измерение вектора кинетического момента в системе силовых гироскопов, определение по измеренным значениям и суммарного вектора кинетического момента , измерение единичного вектора направления на Солнце , измерение текущего I и максимального Imax токов прихода от солнечных батарей, определение по измеренным значениям , I и Imax углов разворота солнечных батарей относительно оси вращения. В процессе формирования управляющей силы от воздействия светового потока на поверхность СБ развороты батарей осуществляют с учетом ограничения, по которому разница между током прихода и током нагрузки не должна превышать предельно допустимого значения. При этом ток прихода зависит от поворота нормали к рабочей поверхности СБ относительно измеренного вектора . Формирование управляющей силы направлено на получение заданного приращения характеристической скорости и одновременного создания управляющего момента для разгрузки СГ. В свою очередь, разгрузку СГ от накопленного кинетического момента осуществляют при формировании разгрузочного момента от сил светового давления и равного противоположно направленного управляющего момента от системы СГ, стабилизирующей угловые положения КА при действии указанных внешних сил. Таким образом, по измеренным значениям , I и Imax определяют углы разворота солнечных батарей относительно оси вращения, обеспечивающие формирование требуемых управляющих сил и моментов от светового давления на поверхности СБ.
При использовании рассматриваемого способа применяется система управления движением и навигации (СУДН) КА, построенная на принципах бесплатформенных инерциально-навигационных систем (БИНС) [2]. Основным элементом для построения и функционирования БИНС являются измерители вектора угловой скорости . При выходе из строя измерителя угловой скорости, перестает функционировать кинематический контур СУДН, в результате чего принципы БИНС перестают работать и аппарат теряет заданную ориентацию, в том числе и ориентацию СБ на Солнце. Далее время существования КА на орбите определяется «резервным временем энергообеспечения» от вторичных источников питания. При этом на многих современных КА, имеющих на борту в структуре СУДН навигационный контур, солнечные датчики (СД) не устанавливаются. Задачу определения на борту КА направления на Солнце решает указанный контур.
В рассмотренной аномальной ситуации динамический контур СУДН остается работоспособным, в частности не теряется управление СГ и приводами СБ.
Техническим результатом изобретения является обеспечение сохранения функций в условиях непредвиденных воздействий на систему внутренних дестабилизирующих факторов КА при потере его ориентации на Солнце в результате отказа измерителя угловой скорости за счет управления СГ и приводами СБ.
Для достижения технического результата в способе формирования управляющих воздействий на космический аппарат с силовыми гироскопами и поворотными солнечными батареями, включающем измерение вектора абсолютной угловой скорости космического аппарата , формирование управляющих воздействий на космический аппарат силовыми гироскопами, измерение вектора кинетического момента в системе силовых гироскопов, определение по измеренным значениям и суммарного вектора кинетического момента , измерение единичного вектора направления на Солнце , измерение текущего I и максимального Imax токов прихода от солнечных батарей, определение по измеренным значениям , I и Imax углов разворота солнечных батарей относительно оси вращения, фиксируют в момент времени t0 отказа измерителя угловой скорости достоверное значение суммарного вектора кинетического момента  , определяют угловую скорость прецессии осесимметричного космического аппарата с учетом , разворачивают солнечные батареи вокруг положительного направления параллельного оси симметрии OZ в противоположных направлениях на углы между нормалями
, определяют угловую скорость прецессии осесимметричного космического аппарата с учетом , разворачивают солнечные батареи вокруг положительного направления параллельного оси симметрии OZ в противоположных направлениях на углы между нормалями  и
и  к рабочим поверхностям и одной из осей ОХ связанной системы координат, определяют текущие значения угла γ между проекцией вектора на плоскость ΧΟΥ связанной системы координат
к рабочим поверхностям и одной из осей ОХ связанной системы координат, определяют текущие значения угла γ между проекцией вектора на плоскость ΧΟΥ связанной системы координат  и выбранной осью ОХ с учетом токов прихода солнечных батарей I1, I1max, I2, I2max и углов разворота солнечных батарей, по измеренным значениям токов I1 и I2 определяют наличие освещенности солнечных батарей на контрольном интервале времени поиска Δτ и в случае ее отсутствия, формируют относительно оси ΟΖ кинетический момент ΗΖ1 в системе силовых гироскопов до момента получения угловой скорости собственного вращения космического аппарата для освещения рабочих поверхностей солнечных батарей, в случаях освещенности рабочих поверхностей солнечных батарей на контрольном интервале Δτ или в процессе собственного вращения космического аппарата, формируют относительно оси OZ кинетический момент HΖ2 в системе силовых гироскопов до момента получения угловой скорости собственного вращения
и выбранной осью ОХ с учетом токов прихода солнечных батарей I1, I1max, I2, I2max и углов разворота солнечных батарей, по измеренным значениям токов I1 и I2 определяют наличие освещенности солнечных батарей на контрольном интервале времени поиска Δτ и в случае ее отсутствия, формируют относительно оси ΟΖ кинетический момент ΗΖ1 в системе силовых гироскопов до момента получения угловой скорости собственного вращения космического аппарата для освещения рабочих поверхностей солнечных батарей, в случаях освещенности рабочих поверхностей солнечных батарей на контрольном интервале Δτ или в процессе собственного вращения космического аппарата, формируют относительно оси OZ кинетический момент HΖ2 в системе силовых гироскопов до момента получения угловой скорости собственного вращения  космического аппарата для обнуления угла γ, а после приведения угла γ к нулевому значению, формируют относительно оси OZ кинетический момент HZ3 в системе силовых гироскопов до момента получения угловой скорости собственного вращения
космического аппарата для обнуления угла γ, а после приведения угла γ к нулевому значению, формируют относительно оси OZ кинетический момент HZ3 в системе силовых гироскопов до момента получения угловой скорости собственного вращения  космического аппарата для его угловой стабилизации относительно оси OZ, с учетом угловой скорости собственного вращения
космического аппарата для его угловой стабилизации относительно оси OZ, с учетом угловой скорости собственного вращения  космического аппарата и угловой скорости прецессии космического аппарата определяют значение проекции вектора на ось OZ GOZ, в процессе указанной угловой стабилизации, по измеренным значениям тока I1, I2, углам разворота солнечных батарей и углу γ, определяют угол β между выбранной осью связанной системы координат ОХ и единичным вектором
космического аппарата и угловой скорости прецессии космического аппарата определяют значение проекции вектора на ось OZ GOZ, в процессе указанной угловой стабилизации, по измеренным значениям тока I1, I2, углам разворота солнечных батарей и углу γ, определяют угол β между выбранной осью связанной системы координат ОХ и единичным вектором  направления на Солнце, при этом для отсчета угла β вокруг оси +OY измеряют температуру T+OZ на поверхности космического аппарата со стороны оси +OZ и температуру T-OZ на поверхности космического аппарата со стороны оси -OZ и по соотношению измеренных значений температур выбирают знак угла β, с учетом проекции GOZ, а также угла β и угла между векторами и , определяют значение проекции вектора на ось OX GOX, по вектору и его проекциям GOX, GOZ, определяют значение проекции вектора на ось OY GOY, осуществляют гашение текущих угловых скоростей космического аппарата по осям OX, OY путем формирования в системе силовых гироскопов управляющих значений HX и HY, принимаемых равным значениям GOX и GOY соответственно, а по завершению указанного гашения, формируют кинетический момент HY1 в системе силовых гироскопов до момента получения угловой скорости
направления на Солнце, при этом для отсчета угла β вокруг оси +OY измеряют температуру T+OZ на поверхности космического аппарата со стороны оси +OZ и температуру T-OZ на поверхности космического аппарата со стороны оси -OZ и по соотношению измеренных значений температур выбирают знак угла β, с учетом проекции GOZ, а также угла β и угла между векторами и , определяют значение проекции вектора на ось OX GOX, по вектору и его проекциям GOX, GOZ, определяют значение проекции вектора на ось OY GOY, осуществляют гашение текущих угловых скоростей космического аппарата по осям OX, OY путем формирования в системе силовых гироскопов управляющих значений HX и HY, принимаемых равным значениям GOX и GOY соответственно, а по завершению указанного гашения, формируют кинетический момент HY1 в системе силовых гироскопов до момента получения угловой скорости  для обнуления угла β, а после приведения угла к нулевому значению, формируют кинетический момент HY2 в системе силовых гироскопов до момента получения угловой скорости
для обнуления угла β, а после приведения угла к нулевому значению, формируют кинетический момент HY2 в системе силовых гироскопов до момента получения угловой скорости  угловой стабилизации движения относительно оси OY.
угловой стабилизации движения относительно оси OY.
Для пояснения сути предложенного технического решения представлены:
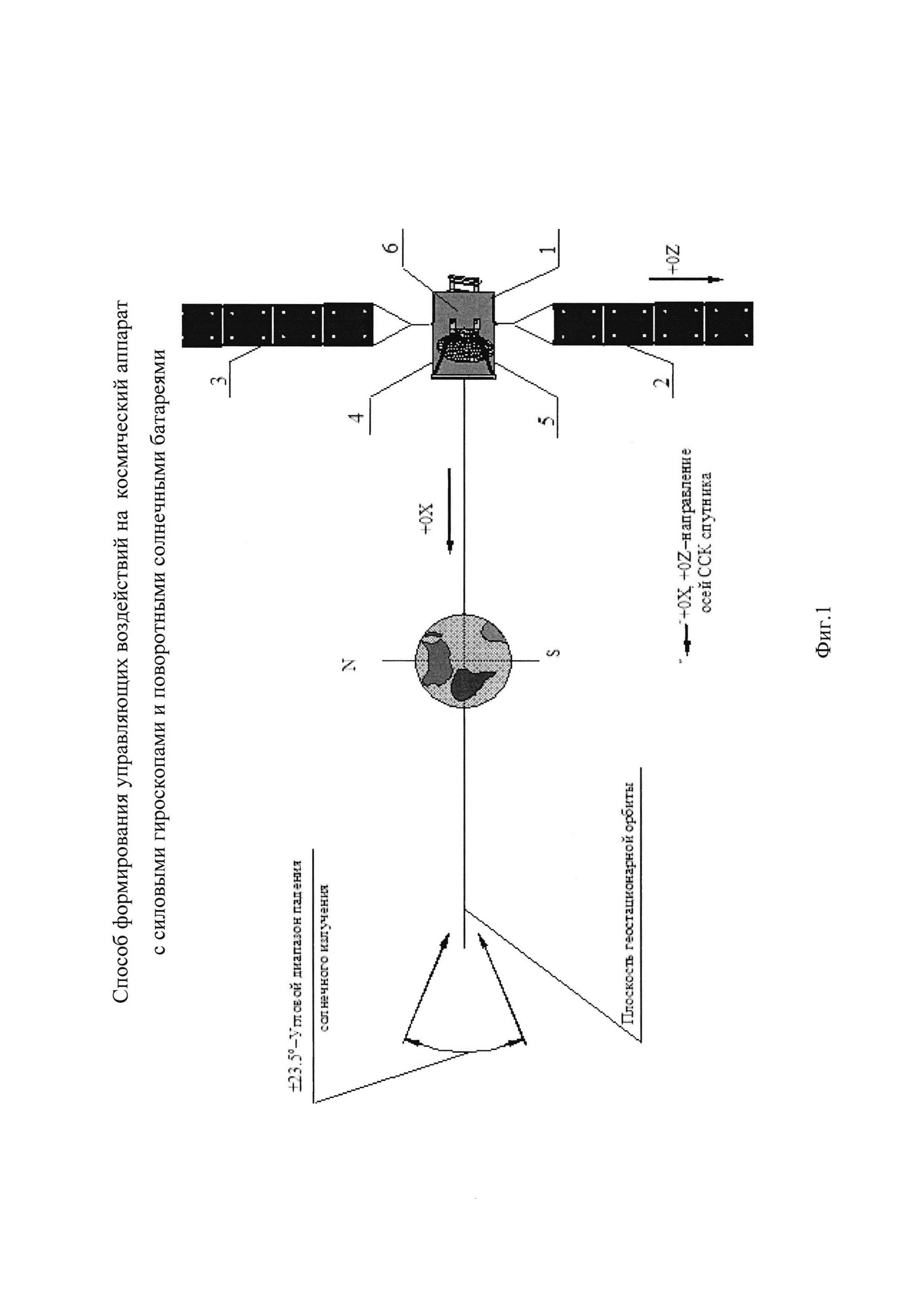
Фиг. 1 - схема расположения на орбите КА - геостационарного спутника связи (ГСС);
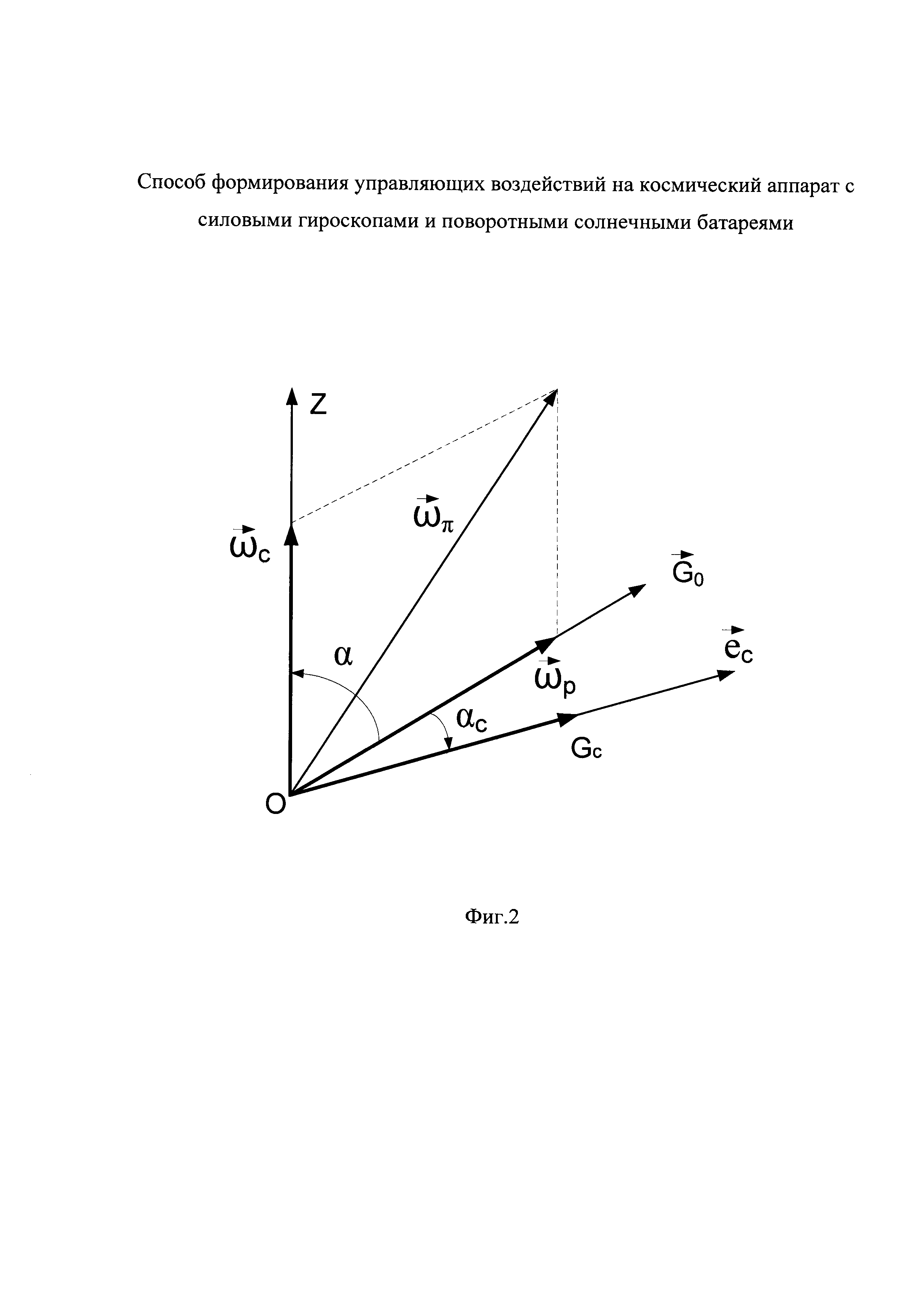
Фиг. 2 - схема векторного отображения регулярной прецессии КА и вектора в инерциальном пространстве;
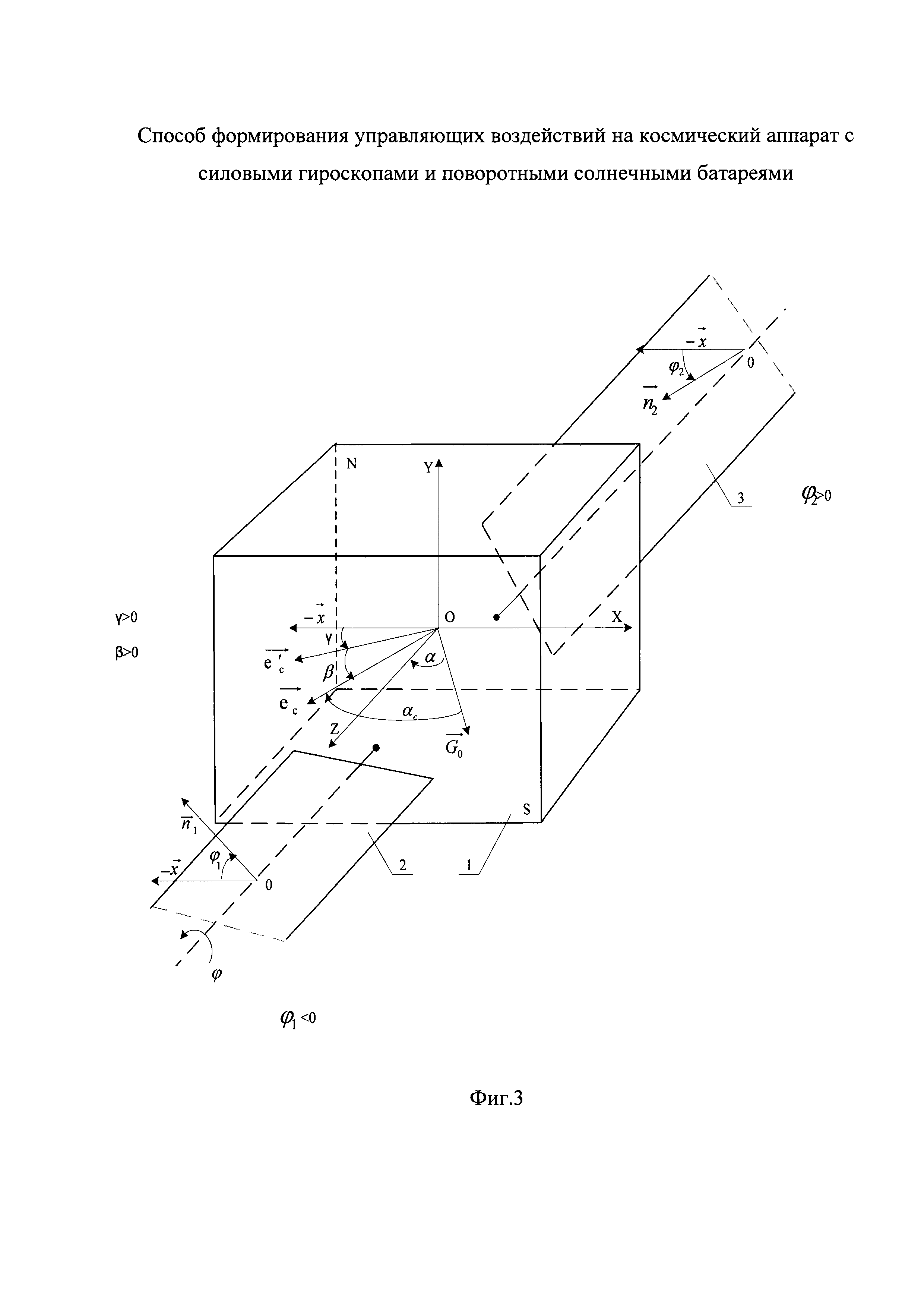
Фиг. 3 - схема векторного построения решаемой задачи;
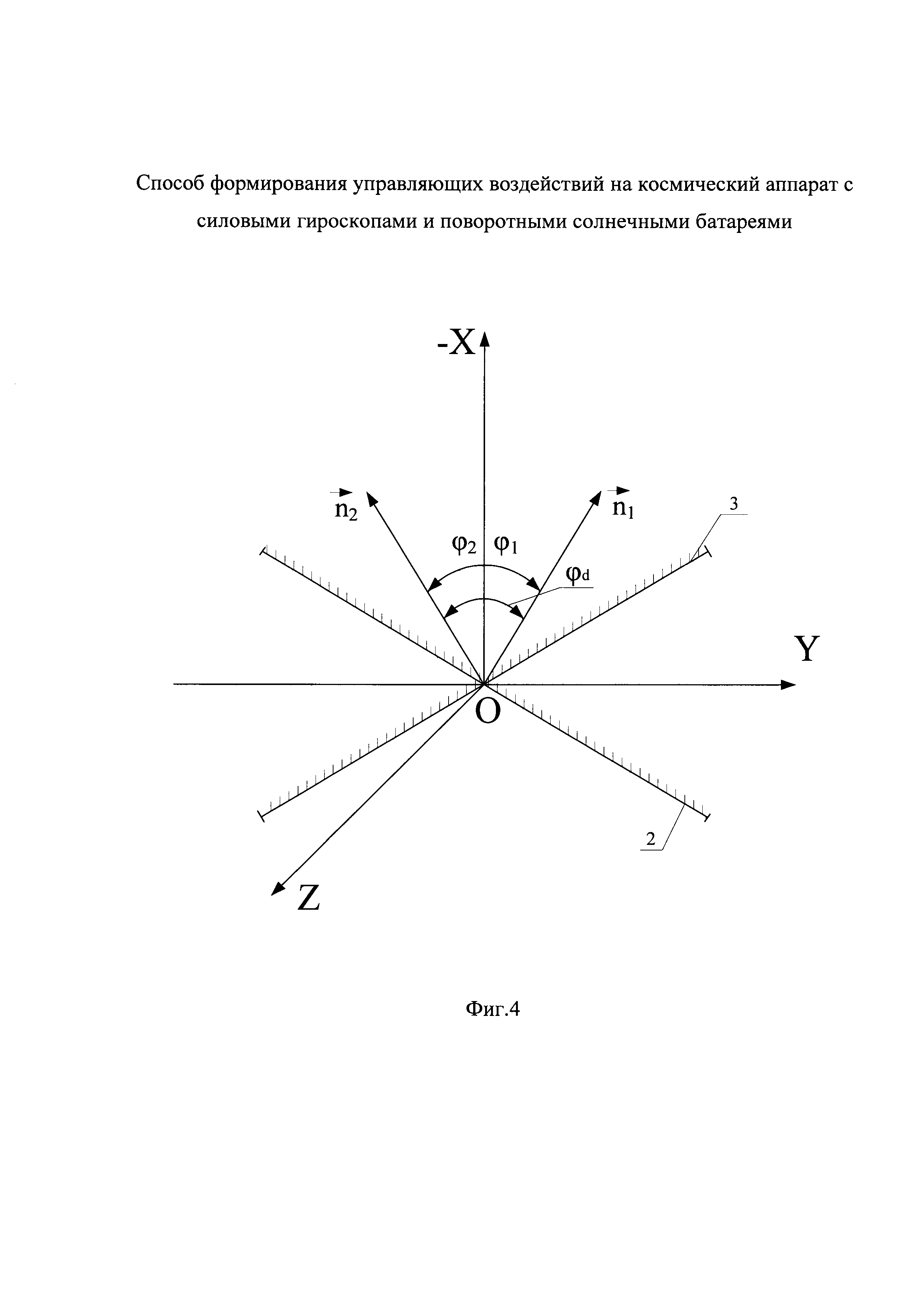
Фиг. 4 - схема построения поля зрения солнечного датчика из СБ.
Предлагаемый способ может быть использован в КА с регулярной ориентацией относительно Солнца, которая обеспечивает работу поворотных СБ в качестве фотоэлектрических преобразователей солнечной энергии. В наибольшей степени к указанным КА относятся спутники связи, расположенные на геостационарной и высокоэллиптических орбитах.
В качестве примера на фиг. 1 представлена схема расположения КА ГСС типа «Ямал» на ГСО, при этом введены обозначения:
1 - корпус КА;
2 - СБ1;
3 - СБ2;
4 - северная панель КА;
5 - южная панель КА;
6 - западная панель КА.
На фиг. 1 также показаны направления осей ΟΧΥΖ связанной системы координат (ССК). При этом оси вращения СБ параллельны оси ΟΖ КА. Рабочей для КА ГСС является орбитальная система координат (ОСК).
Регулярность ориентации ΚΑ 1 относительно Солнца заключается в том, что две поворотные СБ1 2 и СБ2 3, расположенные со стороны южной 5 и северной 4 панелей ΚΑ 1 постоянно освещены Солнцем, за исключением случаев нахождения аппарата в конусе тени Земли. В то же время западная 6 и восточная панели спутника попеременно освещаются в течение суток. Северная 4 и южная 5 панели спутника максимальным образом освещаются соответственно в дни летнего и зимнего солнцестояния под углами ±23,5°. В плоскости ГСО Солнце находится в дни весеннего и осеннего равноденствия. В остальные дни освещение западной и южной панелей зависит от указанного на фиг. 1 углового диапазона падения солнечного излучения.
Для дальнейшего решения задачи полагаем, что центробежные моменты инерции КА являются малыми по сравнению с центральными моментами инерции JX, JY, JZ и считаем КА осесимметричным телом с JX=JY=J. Полагаем также, что моменты инерции относительно осей ОХ и OY в несколько раз превышают момент инерции относительно оси симметрии OZ, J>JZ. Указанным требованиям удовлетворяют большинство управляемых на ГСО спутников.
После потери управляемости КА относительно центра масс в результате отказа измерителя угловой скорости в момент времени t0, аппарат перейдет в инерционное вращение. Указанное вращение представляет собой регулярную прецессию в инерциальном пространстве вокруг оси прецессии заданной вектором (см. Айзерман М.А. Классическая механика. М., «Наука». 1974, стр. 195) [3], представляющим собой достоверное значение вектора G, фиксируемое в момент времени t0. Схема векторного отображения регулярной прецессии КА и вектора в инерциальном пространстве на момент времени t0 представлена на фиг. 2, где введены обозначения:
- достоверное значение суммарного вектора кинетического момента КА, зафиксированное на момент времени t0;
OZ - ось симметрии КА;
 - вектор угловой скорости прецессии КА;
- вектор угловой скорости прецессии КА;
 - вектор угловой скорости собственного вращения КА;
- вектор угловой скорости собственного вращения КА;
 - вектор угловой скорости KA;
- вектор угловой скорости KA;
α - угол прецессии;
αс - угол между векторами и ;
GC - проекция вектора на ,  .
.
Рассматриваем случай, когда действием внешнего возмущающего момента можно пренебречь на интервале действий способа (см., например, Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. М. «Наука», 1974, стр. 451) [4]. Будем считать также неизменным положение вектора в инерциальном пространстве на интервале проведения динамических операций в предлагаемом способе до момента построения инерциальной солнечной ориентации. Тогда, на рассматриваемом интервале регулярной прецессии КА, углы α и αс будут постоянными величинами.
Если суммарный вектор кинетического момента СГ  равен нулю (или приведен к нулю), то КА будет совершать регулярную прецессию с угловой скоростью прецессии
равен нулю (или приведен к нулю), то КА будет совершать регулярную прецессию с угловой скоростью прецессии 

вокруг вектора и угловой скоростью собственного вращения  , равной
, равной

где  - угловая скорость КА вокруг оси ΟΖ в связанной системе координат равная
- угловая скорость КА вокруг оси ΟΖ в связанной системе координат равная

где GOZ - проекция суммарного вектора накопленного кинетического момента на ось OZ КА, заданную единичным вектором  .
.
Если привести кинетический момент к значению (0, 0, HZ), то КА будет совершать регулярную прецессию с такой же скоростью прецессии и с таким же углом α между направлением скорости прецессии и осью симметрии, как и для случая HZ=0. Однако при этом изменится, по сравнению с (3), угловая скорость вращения КА вокруг оси OZ

Таким образом, изменяя HZ можно изменять угловую скорость собственного вращения КА (см. (2)) для обеспечения поиска Солнца и приведения направления на Солнце (вектора ) в одну из плоскостей, образованной осью симметрии KA OZ и одной из осей ССК (ОХ или OY), например, плоскость OXZ.
Далее, для обеспечения поиска Солнца, разворачиваем солнечные батареи вокруг положительного направления параллельного оси симметрии OZ в противоположных направлениях на углы между нормалями  и
и  к рабочим поверхностям и одной из осей ОХ связанной системы координат. При этом СБ1 2 разворачивается в положение, в котором нормаль к рабочей поверхности отклонена на угол (-ϕ1) от оси ОХ, образующей вместе с осью симметрии KA ΟΖ, плоскость для приведения вектора , а СБ2 3 разворачивается в положение, в котором нормаль к рабочей поверхности отклонена на угол (+ϕ2) от оси ОХ, образующей вместе с осью симметрии KA ΟΖ, плоскость для приведения в нее вектора . В качестве примера рассмотрим плоскость ΧΟΖ, при этом для указанного отсчета примем ось -ОХ. Отсчет углов для поворотов СБ осуществляется вокруг положительного направления оси ΟΖ КА.
к рабочим поверхностям и одной из осей ОХ связанной системы координат. При этом СБ1 2 разворачивается в положение, в котором нормаль к рабочей поверхности отклонена на угол (-ϕ1) от оси ОХ, образующей вместе с осью симметрии KA ΟΖ, плоскость для приведения вектора , а СБ2 3 разворачивается в положение, в котором нормаль к рабочей поверхности отклонена на угол (+ϕ2) от оси ОХ, образующей вместе с осью симметрии KA ΟΖ, плоскость для приведения в нее вектора . В качестве примера рассмотрим плоскость ΧΟΖ, при этом для указанного отсчета примем ось -ОХ. Отсчет углов для поворотов СБ осуществляется вокруг положительного направления оси ΟΖ КА.
Для дальнейшего объяснения сути предлагаемого технического решения рассмотрим схему векторного построения решаемой задачи, представленную на фиг. 3, при этом, дополнительно к ранее указанным, введены обозначения:
Ν, S - обозначения северной и южной панелей КА соответственно (см. фиг.1);
-  - единичный вектор, задающий направления оси -ОХ КА;
- единичный вектор, задающий направления оси -ОХ КА;
ϕ - направление положительного отсчета углов разворота ϕ1 и ϕ2;
β - угол между вектором  и его проекцией
и его проекцией  на плоскость ΧΟΥ, перпендикулярную оси симметрии КА ΟΖ;
на плоскость ΧΟΥ, перпендикулярную оси симметрии КА ΟΖ;
γ - угол между проекцией  и осью -ОХ КА, определяющей с осью симметрии ΟΖ плоскость приведения вектора .
и осью -ОХ КА, определяющей с осью симметрии ΟΖ плоскость приведения вектора .
В результате векторного построения решаемой задачи на фиг. 3, получено расположение СБ, схема которого представлена на фиг. 4. Обозначения на фиг. 4 соответствуют ранее введенным обозначениям на предыдущих фигурах. Главная ось чувствительности расположенных СБ направлена по оси - ОХ КА. Рабочее поле углового приведения ϕd Солнца к оси - ОХ вокруг оси OZ составляет

Для последующего расчета примем |ϕ1|=|ϕ2|=30°, тогда ϕd=±60°.
Далее, с использованием полученного расположения СБ, приведем проекцию вектора в плоскость XOZ за счет угловой скорости собственного вращения КА относительно оси симметрии OZ. Условием приведения является получения значения угла γ=0. Определим зависимость указанного угла от измеренных значений тока в СБ1 и СБ2. Для этого, с учетом обозначений на фиг. 3, 4, определим значения единичных векторов
Освещенность СБ пропорциональна косинусу угла между , и  (Грилихес В.Α., Орлов П.П., Попов Л.Б. Солнечная энергия и космические полеты. М. «Наука», 1984) [5]:
(Грилихес В.Α., Орлов П.П., Попов Л.Б. Солнечная энергия и космические полеты. М. «Наука», 1984) [5]:

где I1, I1max - текущее измеренное и максимальное значения тока СБ1 соответственно;
I2, I2max - текущее измеренное и максимальное значения тока СБ2 соответственно.
Максимально возможные значения тока СБ измеряются до момента времени t0 при совпадении нормалей к рабочим поверхностям с вектором .
После подстановки (6) в (7) получим

Из (8) получим отношение

Преобразовав (9) относительно угла γ получим

Таким образом

Для принятого примера |ϕ1|=|ϕ2|=30°

После аномального события, КА продолжает собственное вращение относительно оси симметрии OZ в общем случае с неизвестной скоростью и в не известном направлении. Связано это с тем, что на некотором промежутке времени возможны управляющие воздействия со стороны исполнительных органов в процессе отказа измерителя угловой скорости, т.е. может производиться управление угловым движением КА с использованием некорректных измерений указанной скорости.
Поэтому первоначально определяем наличие Солнца по измеренным значениям тока СБ. Если освещенность СБ отсутствует (Ι1=Ι2=0), проверяем выполнение условия

где  - максимальное значение угловой скорости приведения системой СГ угла γ на фазовой плоскости к нулевому значению при управлении относительно оси ΟΖ (см. [4], стр. 179-181), где az - максимальное ускорение КА вокруг оси OZ при штатном использовании системы СГ; γρ - пороговое значение диапазона изменения угла γ на фазовой плоскости (диапазон изменения угла от (-γp) до (+γp)).
- максимальное значение угловой скорости приведения системой СГ угла γ на фазовой плоскости к нулевому значению при управлении относительно оси ΟΖ (см. [4], стр. 179-181), где az - максимальное ускорение КА вокруг оси OZ при штатном использовании системы СГ; γρ - пороговое значение диапазона изменения угла γ на фазовой плоскости (диапазон изменения угла от (-γp) до (+γp)).
Для этого по измеренным значениям токов Ι1 и I2 определяем наличие освещенности СБ на контрольном интервале времени поиска Солнца, при управлении КА на фазовой плоскости без перерегулирования

в течение которого Солнце должно быть зафиксировано по токам СБ при вращении КА с угловой скоростью ωmz.
Если освещенность Солнцем двух батарей по истечению указанного интервала времени отсутствует то, следовательно, величина угловой скорости собственного вращения  КА меньше
КА меньше  .
.
В таком случае формируем относительно оси OZ кинетический момент в системе СГ

до момента получения угловой скорости собственного вращения ωС1 поиска с целью освещения рабочих поверхностей СБ. При этом ωС1=kωmz, где k>1 - коэффициент масштабирования угловой скорости для поиска Солнца.
Если по окончанию контрольного промежутка времени не освещена ни одна СБ и на начало промежутка не была освещена ни одна СБ знак кинетического момента может быть произвольным, так как исходная скорость вращения имеет малое значение и не превышает для случая приведенного в примере ωmz/2.
В других случаях знак указанного сформированного кинетического момента выбираем исходя из нижеследующих условий:
- если по окончанию контрольного промежутка времени не освещена ни одна СБ, а на начало промежутка была освещена СБ2, то знак положительный. Связано это с тем, что угловая скорость собственного вращения направлена в сторону увеличения положительного угла ϕ2 (см. фиг. 3), при этом Солнце первоначально освещало край СБ2 и последующее вращение КА привело к потере освещения батареи. Следовательно, угловая скорость собственного вращения КА  направлена в сторону оси +ΟΖ и это приводит к уводу СБ от направления на Солнце. Формирование положительного значения ΗΖ1 приведет к созданию противоположно направленного управляющего момента Μz, который приведет к первоначальному гашению набранной скорости и последующему смене знака угловой скорости на отрицательное значение;
направлена в сторону оси +ΟΖ и это приводит к уводу СБ от направления на Солнце. Формирование положительного значения ΗΖ1 приведет к созданию противоположно направленного управляющего момента Μz, который приведет к первоначальному гашению набранной скорости и последующему смене знака угловой скорости на отрицательное значение;
- если по окончанию контрольного промежутка времени не освещена ни одна СБ, а на начало промежутка была освещена СБ1, то знак отрицательный. Связано это с тем, что угловая скорость собственного вращения направлена в сторону увеличения отрицательного угла ϕ1 (см. фиг. 3), при этом Солнце первоначально освещало край СБ1 и последующее вращение КА привело к потере освещения батареи. Следовательно, угловая скорость собственного вращения КА  направлена в сторону оси «-ΟΖ» и это приводит к уводу СБ от направления на Солнце. Формирование отрицательного значения ΗΖ1 приведет к созданию противоположно направленного управляющего момента Μz, который приведет к первоначальному гашению набранной скорости и последующему смене знака угловой скорости на положительное значение;
направлена в сторону оси «-ΟΖ» и это приводит к уводу СБ от направления на Солнце. Формирование отрицательного значения ΗΖ1 приведет к созданию противоположно направленного управляющего момента Μz, который приведет к первоначальному гашению набранной скорости и последующему смене знака угловой скорости на положительное значение;
- если по окончанию контрольного промежутка времени освещена СБ1, то знак положительный. Связано это с тем, что угловая скорость собственного вращения направлена в сторону увеличения отрицательного угла ϕ1. При этом, дальнейшее движение приводит к увеличению освещенности СБ. Формирование положительного значения ΗΖ1 приведет к созданию противоположно направленного управляющего момента Μz, который приведет к увеличению значения набранной скорости в требуемом направлении;
- если по окончанию контрольного промежутка времени освещена СБ2, то знак отрицательный. Связано это с тем, что угловая скорость собственного вращения направлена в сторону увеличения положительного угла ϕ2. При этом, дальнейшее движение приводит к увеличению освещенности СБ. Формирование отрицательного значения ΗΖ1 приведет к созданию противоположно направленного управляющего момента Μz, который приведет к увеличению значения набранной скорости в требуемом направлении.
Если Солнце освещает обе СБ, то приведение к углу γ=0 осуществляется с угловой скоростью собственного вращения  по следующей схеме. С использованием (11, 12), рассчитываются углы γ и по ним угловая скорость
по следующей схеме. С использованием (11, 12), рассчитываются углы γ и по ним угловая скорость  , как производная угла γ, и если модуль угловой скорости больше или равен
, как производная угла γ, и если модуль угловой скорости больше или равен  , то величина угловой скорости собственного вращения уменьшается. При этом если угол γ положителен, то формируем ΗΖ2:=ΗZ-ΔΗΖ2, а если угол γ отрицателен, то формируем ΗΖ2:=ΗΖ+ΔΗΖ2, где ΔΗΖ2 - некоторая положительная величина равная, например, 5% от HMAX, где HMAX максимальные размеры радиуса шара вписанного в область располагаемых значений кинетического момента системы СГ.
, то величина угловой скорости собственного вращения уменьшается. При этом если угол γ положителен, то формируем ΗΖ2:=ΗZ-ΔΗΖ2, а если угол γ отрицателен, то формируем ΗΖ2:=ΗΖ+ΔΗΖ2, где ΔΗΖ2 - некоторая положительная величина равная, например, 5% от HMAX, где HMAX максимальные размеры радиуса шара вписанного в область располагаемых значений кинетического момента системы СГ.
Если модуль угловой скорости меньше , то величина угловой скорости увеличивается. При этом если угол γ положителен, то формируем HZ2:=HZ+ΔΗΖ2; если угол γ отрицателен, то формируем ΗΖ2:=ΗZ-ΔΗΖ2.
После приведения к γ=0 производится стабилизация углового положения вокруг оси +ΟΖ с угловой скоростью собственного вращения  , при этом логика управления следующая: если ток с СБ1 больше, чем с СБ2 (угол γ отрицателен), то задаем Δγ отрицательным и соответственно формируем приращение ΗZ положительным (ΗΖ3:=ΗΖ+ΔΗΖ3). Если ток с СБ2 больше, чем с СБ1 (угол γ положителен), то задаем Δγ положительным и, соответственно, формируем приращение ΗZ отрицательным (ΗΖ3:=ΗΖ-ΔΗΖ3), где ΔΗΖ3 некоторая положительная величина равная, например, 3% от НМАХ, где HMAX максимальные размеры радиуса шара вписанного в область располагаемых значений кинетического момента системы СГ.
, при этом логика управления следующая: если ток с СБ1 больше, чем с СБ2 (угол γ отрицателен), то задаем Δγ отрицательным и соответственно формируем приращение ΗZ положительным (ΗΖ3:=ΗΖ+ΔΗΖ3). Если ток с СБ2 больше, чем с СБ1 (угол γ положителен), то задаем Δγ положительным и, соответственно, формируем приращение ΗZ отрицательным (ΗΖ3:=ΗΖ-ΔΗΖ3), где ΔΗΖ3 некоторая положительная величина равная, например, 3% от НМАХ, где HMAX максимальные размеры радиуса шара вписанного в область располагаемых значений кинетического момента системы СГ.
Далее, при определении проекций вектора суммарного кинетического момента в связанных осях КА, используем обозначения  (GOX, GOY, GOZ) и
(GOX, GOY, GOZ) и  (HX, HΥ, ΗZ).
(HX, HΥ, ΗZ).
С учетом угла α между вектором  и осью +OZ КА, получим
и осью +OZ КА, получим  (см. фиг. 3). Тогда суммарное значение угловой скорости собственного вращения и проекции угловой скорости прецессии
(см. фиг. 3). Тогда суммарное значение угловой скорости собственного вращения и проекции угловой скорости прецессии  на ось +ΟΖ, с учетом угловой скорости собственного вращения
на ось +ΟΖ, с учетом угловой скорости собственного вращения  при стабилизации углового движения относительно γ=0, может быть представлено в виде
при стабилизации углового движения относительно γ=0, может быть представлено в виде

С учетом этого и подстановки в (16) выражений (4) и (1) получим уравнение

решение которого определяет значение проекции вектора на ось OZ:

После приведения вектора в плоскость XOZ (при γ=0), определяем его направление на Солнце через угол β (см. фиг. 3). Для этого используется информация о величине измеренного текущего значения тока в любой из двух СБ в отношении к максимально возможному значению тока (см. (7)), например, с СБ1:

или с СБ2

При этом угол β определяет угловое расстояние от оси «-ОХ» до единичного вектора направления на Солнце и рассчитывается следующим образом

или

При |ϕ1|=|ϕ2|=30° и γ=0

Отсчет угла β производится против часовой стрелки вокруг оси +ΟΥ. Для определения знака угла β измеряем температуру на поверхностях (панелях N и S, см. фиг. 1, 3) корпуса КА, перпендикулярных оси собственного вращения ±ΟΖ. Данная информация используется для определения знака проекции вектора направления на Солнце на ось ΟΖ КА (определения, какая из сторон КА освещена Солнцем). При этом, знак угла β определяется исходя из освещенности рабочих поверхностей КА следующим образом:
- измеряем температуру Τ+OZ на поверхности КА со стороны оси +ΟΖ;
- измеряем температуру T-OZ на поверхности КА со стороны оси -ΟΖ;
- производим сравнение указанных температур и при:

Диапазон изменения угла β: (-90°<β<90°).
После приведения в плоскость ΧΟΖ и расчета GOZ определяем GOX из решения уравнения

в результате получим

Далее определяем

при этом знак G0Y противоположен знаку угловой скорости  .
.
Полученные компоненты GOX и GOY позволяют, путем приведения  к
к  по осям OX, OY, осуществить гашение текущих угловых скоростей КА. Для этого в динамическом контуре СУДН формируют в системе СГ управляющие значения HX и ΗY, принимаемые равными значениям GOX и GOY соответственно (формируют управляющие значения: HX:=GOX; HY:=GOY).
по осям OX, OY, осуществить гашение текущих угловых скоростей КА. Для этого в динамическом контуре СУДН формируют в системе СГ управляющие значения HX и ΗY, принимаемые равными значениям GOX и GOY соответственно (формируют управляющие значения: HX:=GOX; HY:=GOY).
После обнуления угловых скоростей КА находится в инерциальной ориентации, при которой вектор  расположен в плоскости XOZ. Далее приводим указанный вектор к оси - ОХ, за счет управления КА относительно оси OY. Для этого, по текущим измеренным значениям тока I, с использованием выражений (21)-(23), рассчитываются углы β и угловая скорость
расположен в плоскости XOZ. Далее приводим указанный вектор к оси - ОХ, за счет управления КА относительно оси OY. Для этого, по текущим измеренным значениям тока I, с использованием выражений (21)-(23), рассчитываются углы β и угловая скорость  , как производная угла β, с учетом знака угла, определенного по измеренным значениям температур по условиям (24). Формируют кинетический момент ΗΥ1 в системе силовых гироскопов до получения угловой скорости
, как производная угла β, с учетом знака угла, определенного по измеренным значениям температур по условиям (24). Формируют кинетический момент ΗΥ1 в системе силовых гироскопов до получения угловой скорости  для приведения по измеренным значениям тока СБ угла β к нулевому значению. При этом логика управления движением следующая:
для приведения по измеренным значениям тока СБ угла β к нулевому значению. При этом логика управления движением следующая:
- если модуль угловой скорости больше или равен  , где ау - максимальная величина ускорения по оси ΟΥ, то величина угловой скорости уменьшается:
, где ау - максимальная величина ускорения по оси ΟΥ, то величина угловой скорости уменьшается:
при β>0 ΗY1:=ΗY-ΔΗY1;
при β<0 ΗY1:=ΗY+ΔHY1,
где ΔHY1 - некоторая положительная величина равная, например, 10% от HMAX;
- если модуль угловой скорости меньше , то величина угловой скорости увеличивается:
при β>0 ΗΥ1:=ΗΥ+ΔΗΥ1;
при β<0 ΗΥ1:=ΗY-ΔΗY1,
где ΔΗY1 - некоторая положительная величина равная, например, 10% от HMAX, где НМАХ максимальные размеры радиуса шара вписанного в область располагаемых значений кинетического момента системы СГ
После приведения к β=0 производится стабилизация углового положения КА, при этом логика управления следующая:
- если угол β<0, то задаем ΔωY отрицательным и, соответственно, приращение ΗΥ2 положительным (ΗΥ2:=ΗΥ+ΔΗY2);
- если угол β>0, то задаем ΔωY положительным и, соответственно, приращение ΗΥ2 отрицательным (ΗΥ2:=ΗY-ΔΗY2),
где ΔΗΥ2 - некоторая положительная величина равная, например, 5% от HMAX.
Таким образом, в конце построения солнечной ориентации производится угловая стабилизация КА по двум углам управления γ и β, с поддержанием оси - ОХ на Солнце в инерциальной системе координат. При этом величины углов ϕ следует выбирать в пределах 10-30°, чтобы с одной стороны был приход электроэнергии близкий к максимальному, с другой, чтобы измерение угла γ (12) вблизи нуля имело линейную характеристику.
Предложенный способ может быть реализован бортовым комплексом управления (БКУ) автоматических КА (см. Микрин Е.А. Бортовые комплексы управления космических аппаратов. Изд. МГТУ им. Н.Э. Баумана, Москва. 2014, стр. 20-22) [6] и СУДН в его составе (см. [6] стр. 56-68). Как указано в [6], функциональное решение задач СУДН производится в трех контурах - кинематическом, навигационном и динамическом. Реализация контуров и межконтурного взаимодействия осуществляется в бортовой цифровой вычислительной системе (БЦВС). В случае отказа измерителя угловой скорости, перестают функционировать кинематический и навигационный контуры. Дальнейшую реализацию предложенного способа выполняет динамический контур. Для этого используется информация с датчиков тока СБ системы электроснабжения (СЭС) и системы обеспечения теплового режима (СОТР), имеющих цифровой интерфейс с БКУ.
В БЦВС существует отдельный блок управления приводами СБ, который может реализовать указанные в способе развороты батарей. Независимое управление силовыми гироскопами также может осуществить динамический контур СУДН, построенный в БЦВС. Необходимые блоки и функциональные связи для реализации алгоритма представлены в [6] на рис. 1.1 и рис. 1.7. Сам алгоритм реализуется в бортовой цифровой вычислительной машине, входящей в состав БЦВС. При этом необходимо отметить, что текущий контроль работоспособности измерителя угловой скорости в БЦВС производится постоянно. И в случае фиксирования аномальной работы измерителя или полного его отказа по результатам контроля, выставляется признак на начало реализации алгоритма управления ориентацией КА, описанного в предлагаемом способе.
Реализация предлагаемого способа позволяет увеличить резервное время энергообеспечения КА от нескольких часов (Ковтун B.C. Управление резервным временем энергообеспечения космического аппарата // Известия РАН. Энергетика. 2013. №1. С. 24-33) [7], до недель (месяцев) и далее, пока не будет принято решение о парировании аномальной ситуации (АС) и дальнейшем продолжении полета КА. Парирование АС может занять продолжительное время, которое понадобиться для дополнительной разработки программного обеспечения БКУ и проведения других мероприятий связанных с перестройкой наземного комплекса управления КА в целом. В частности, в качестве измерителя угловой скорости могут на борту использоваться звездные датчики. Для этих же целей могут быть задействованы наземные и бортовые радиосредства (Патент RU 2191721 C1. МКИ B64G 1/28, 1/32 / Ковтун B.C., Банит Ю.Р. Способ управления ориентацией космического аппарата, снабженного бортовым радиотехническим комплексом // Изобретения 2002. №30) [8], возможны и другие варианты замены работы штатного измерителя угловой скорости.
На протяжении необходимого для этого времени, продолжает работать связь с КА через бортовой радиотехнический комплекс. Работу обеспечивает функционирующая СЭС, получающей электроэнергию от СБ. После выполнения указанных мероприятий по парированию АС, функциональная работоспособность КА может быть восстановлена.
Таким образом, изобретение направлено на приобретение СУДН КА дополнительного свойства живучести - способности системы противостоять и сохранять минимальный набор критически важных функций в условиях отказа измерителя угловой скорости за счет изменения поведения системы (А.Н. Кирилин, Р.Н. Ахметов, А.В. Соллогуб, В.П. Макаров. Методы обеспечения живучести низкоорбитальных автоматических КА зондирования Земли. М., «Машиностроение». 2010) [9]. Приобретенное свойство СУДН позволяет сохранить КА в целом и продолжить его дальнейшее целевое использование после парирования аномальной ситуации.
СПИСОК ЛИТЕРАТУРЫ
1. Патент RU 2196710 С2. МКИ B64G 1/28, 1/44 / Богачев А.В., Ковтун B.C., Платонов В.Н. Способ формирования управляющих моментов на космический аппарат с силовыми гироскопами и поворотными солнечными батареями и система для его осуществления // Изобретения 2003. №2.
2. Патент RU 2207969 С2. МКИ B64G 1/28, 1/44 / Богачев А.В., Земсков Е.Ф., Ковтун B.C., Орловский И.В., Платонов В.Н., Соколов А.В., Улыбышев Ю.П. Способ формирования управляющих воздействий на космический аппарат с силовыми гироскопами и поворотными солнечными батареями // Изобретения 2003. №19.
3. Айзерман М.А. Классическая механика. М. «Наука». 1974.
4. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. М. «Наука», 1974.
5. Грилихес В.Α., Орлов П.П., Попов Л.Б. Солнечная энергия и космические полеты. М. «Наука», 1984.
6. Микрин Е.А. Бортовые комплексы управления космических аппаратов. Изд. МГТУ им. Н.Э. Баумана, Москва. 2014.
7. Ковтун B.C. Управление резервным временем энергообеспечения космического аппарата // Известия РАН. Энергетика. 2013. №1. С. 24-33.
8. Патент RU 2191721 C1. МКИ B64G 1/28, 1/32 / Ковтун B.C., Банит Ю.Р. Способ управления ориентацией космического аппарата, снабженного бортовым радиотехническим комплексом // Изобретения 2002. №30.
9. Кирилин А.Н., Ахметов Р.Н., Соллогуб А.В., Макаров В.П. Методы обеспечения живучести низкоорбитальных автоматических КА зондирования Земли. М., «Машиностроение». 2010.
Способ формирования управляющих воздействий на космический аппарат с силовыми гироскопами и поворотными солнечными батареями, включающий измерение вектора абсолютной угловой скорости космического аппарата , формирование управляющих воздействий на космический аппарат силовыми гироскопами, измерение вектора кинетического момента в системе силовых гироскопов, определение по измеренным значениям и суммарного вектора кинетического момента , измерение единичного вектора направления на Солнце , измерение текущего I и максимального I токов прихода от солнечных батарей, определение по измеренным значениям , I и I углов разворота солнечных батарей относительно оси вращения, отличающийся тем, что фиксируют в момент времени t отказа измерителя угловой скорости достоверное значение суммарного вектора кинетического момента , определяют угловую скорость прецессии осесимметричного космического аппарата с учетом , разворачивают солнечные батареи вокруг положительного направления, параллельного оси симметрии OZ, в противоположных направлениях на углы между нормалями и к рабочим поверхностям солнечных батарей и одной из осей OX связанной системы координат, определяют текущие значения угла γ между проекцией вектора на плоскость XOY связанной системы координат и выбранной осью OX с учетом токов прихода солнечных батарей I, I, I, I и углов разворота солнечных батарей, по измеренным значениям токов I и I определяют наличие освещенности солнечных батарей на контрольном интервале времени поиска Δτ и, в случае её отсутствия, формируют относительно оси OZ кинетический момент H в системе силовых гироскопов до момента получения угловой скорости собственного вращения космического аппарата, потребной для освещения рабочих поверхностей солнечных батарей, в случаях освещенности рабочих поверхностей солнечных батарей на контрольном интервале Δτ или в процессе собственного вращения космического аппарата формируют относительно оси OZ кинетический момент H в системе силовых гироскопов до момента получения угловой скорости собственного вращения космического аппарата, потребной для обнуления угла γ, а после приведения угла γ к нулевому значению формируют относительно оси OZ кинетический момент H в системе силовых гироскопов до момента получения угловой скорости собственного вращения космического аппарата, потребной для его угловой стабилизации относительно оси OZ, с учетом угловой скорости собственного вращения космического аппарата и угловой скорости прецессии космического аппарата определяют значение проекции G вектора на ось OZ, в процессе указанной угловой стабилизации по измеренным значениям токов I, I, углам разворота солнечных батарей и углу γ - определяют угол β между выбранной осью связанной системы координат OX и единичным вектором направления на Солнце, при этом для отсчета угла β вокруг оси +OY измеряют температуру T на поверхности космического аппарата со стороны оси +OZ и температуру T на поверхности космического аппарата со стороны оси –OZ, и по соотношению измеренных значений температур выбирают знак угла β с учетом проекции G, а также угла β и угла между векторами и , определяют значение проекции G вектора на ось OX, по вектору и его проекциям G, Gопределяют значение проекции G вектора на ось OY, осуществляют гашение текущих угловых скоростей космического аппарата по осям OX, OY путем формирования в системе силовых гироскопов управляющих значений H и H, принимаемых равными значениям G и G соответственно, а по завершению гашения указанных угловых скоростей формируют кинетический момент H в системе силовых гироскопов до момента получения угловой скорости для обнуления угла β, а после приведения этого угла к нулевому значению формируют кинетический момент H в системе силовых гироскопов до момента получения угловой скорости , потребной для угловой стабилизации движения относительно оси OY.

























Двигательная установка ракетного блока
Вихревой электронасосный агрегат
Способ обнаружения пассивного космического объекта при сближении с ним активного космического аппарата
Щелевая антенна
Способ увода разгонного ракетного блока с траектории полета космического аппарата
Термокомпрессионное устройство
Космическая система для производства материалов в космосе
Способ увода разгонного ракетного блока с траектории полета космического аппарата
Космическая головная часть и способ ее сборки
Космическая головная часть
Двигательная установка ракетного блока
Вихревой электронасосный агрегат
Способ обнаружения пассивного космического объекта при сближении с ним активного космического аппарата
Щелевая антенна
Способ увода разгонного ракетного блока с траектории полета космического аппарата
Термокомпрессионное устройство
Космическая система для производства материалов в космосе
Способ увода разгонного ракетного блока с траектории полета космического аппарата
Космическая головная часть
Космическая головная часть и способ ее сборки

