Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ
Вид РИД
Изобретение
Изобретение относится к авиационной технике, в частности к конструкции системы управления соосным вертолетом.
Изобретение направлено на разновидность винтокрылых машин, летно-технические характеристики которых не противоречат достигнутому уровню аэромеханики в вертолетостроении.
Известно множество систем управления вертолетом с соосными несущими винтами, в частности в патентах US 6293492 от 01.09.1999 и WO 3091099 от 25.04.2003 управление выполнено за счет установки системы «редуктор - несущие винты» на шарнирных опорах с возможностью изменения в полете угла наклона упомянутой системы относительно фюзеляжа вертолета. Такой способ управления характерен для сверхлегких вертолетов с достаточно низкими значениями моментов инерции и не обеспечивает относительно приемлемых характеристик управляемости.
Известны классические технические решения системы управления вертолетами с соосными несущими винтами, такие как по патентам RU 2307766 от 21.12.2005 и RU 2412081 от 15.10.2009.
Технические решения в этих патентах основаны на принципах полного пространственного управления вертолетом в полете за счет аэромеханики соосных несущих винтов.
Конструкция системы управления содержит два автомата перекоса, которые смонтированы на валах несущих винтов и через систему рычажных ползушек, также смонтированных на упомянутых валах, посредством тяг и качалок соединены с поводками управления углами установки лопастей несущих винтов. Автоматы перекоса, установленные под нижним несущим винтом и между втулками несущих винтов, кинематически связанные рычажной системой, управляют циклическим, общим и дифференциальным шагом обоих несущих винтов.
Установка на валах между втулками несущих винтов вращающихся агрегатов кинематической системы управления лопастями несущих винтов создает на режимах горизонтального (поступательного) полета вертолета турбулентную воздушную зону, увеличивающую вредное сопротивления вертолета, которое по результатам летных испытаний может достигать до 30% сопротивления изолированного планера вертолета (см. Э.А.Петросян, «Аэродинамика соосного вертолета», Полигон-Пресс, М., 2004, стр. 174).
Известно техническое решение системы управления соосными несущими винтами по патенту RU 2155702 от 15.04.1999, по которому содержащиеся в системе управления два автомата перекоса смонтированы на валах редуктора так, что один автомат перекоса размещен под втулкой нижнего несущего винта, а другой - на валу под донной частью редуктора. Автоматы перекоса кинематически связаны между собой суммирующей рычажной системой, обеспечивающей управление циклическим, общим и дифференциальным шагом несущих винтов посредством рычажных качалок, шарнирно соединенных тягами, которые смонтированы внутри полости вала верхнего несущего винта. При этом вал верхнего несущего винта со смонтированными на нем агрегатами управления установлен в редукторе с возможностью осевого перемещения для уменьшения габаритов вертолета на стоянке по высоте.
Известное техническое решение с одной стороны устраняет недостаток, отмеченный в предыдущих двух патентах, связанный с увеличением вредного сопротивления вертолета, так как в зоне между втулками несущих винтов отсутствуют вращающиеся агрегаты системы управления, но с другой техническое решение по патенту RU 2155702 насыщено множеством рычажных механизмов, разветвленных вокруг редуктора, отрицательно влияющих на кинематическую жесткость системы управления и, как следствие, образование люфтов, которые в процессе эксплуатации оказывают так называемое «вождение» и «рывки» органов управления, приводят к преждевременному износу конструкции. А осевая подвижность верхнего вала несущего винта со смонтированными на нем агрегатами управления увеличивают трудоемкость эксплуатационного обслуживания системы управления.
Известно техническое решение системы управления винтокрылым летательным аппаратом с соосными несущими винтами по патенту EP 1724192 от 04.05.2005. Соосные несущие винты в указанном патенте оснащены устройствами для изменения только общего шага каждого из несущих винтов для обеспечения перемещения винтокрылого аппарата по высоте. Устройства размещены под втулками каждого из несущих винтов, не занимая область на внешней поверхности вала между несущими винтами.
Управление по тангажу и крену винтокрылого аппарата выполнено в виде аэродинамических поверхностей типа элеронов, установленных на корпусе фюзеляжа под соосным несущим винтом и корректируется триммером, установленным на стабилизаторе.
Управление по курсу обеспечивается изменением положения килевых аэродинамических поверхностей хвостового оперения.
Поступательный полет винтокрылого аппарата осуществляется за счет тяги толкающего винта изменяемого шага с возможностью реверса тяги.
Все управляющие аэродинамические поверхности, включая несущие винты и толкающий винт, кинематически взаимосвязаны в единую систему управления полетом винтокрылого аппарата, которая допускает как непосредственное ручное управление полетом, так и автоматически запрограммированное.
Недостатком известного технического решения является невозможность «строгого» полета винтокрылой машины боком и выполнения координированных разворотов, особенно на режимах висения.
Кроме того, множество управляющих полетом винтокрылой машины поверхностей ставит под сомнение возможность ручного управления этим летательным аппаратом, а также связано с неэффективностью продольно-поперечного управления из-за его недостаточной мощности, особенно на малых скоростях полета.
По совокупности отличительных признаков рассмотренных аналогов техническое решение по патенту RU 2155702 принято за прототип как совпадающее по большинству отличительных признаков при сохранении эксплуатационных параметров управления вертолетом.
Технической задачей предлагаемого изобретения является создание системы управления соосным вертолетом, устраняющей отмеченные недостатки прототипа и позволяющей упростить конструкцию управления в части уменьшения взаимоподвижных звеньев в кинематической цепи управления, сохраняя необходимую эксплуатационную достаточность управления соосным вертолетом.
Решение поставленной технической задачи достигается тем, что в системе управления соосным вертолетом, содержащей верхний и нижний несущие винты противоположного вращения, закрепленные на валах редуктора, автомат перекоса нижнего несущего винта, суммирующий механизм управления общим и дифференциальным шагом лопастей несущих винтов, подвижную тягу, смонтированную внутри полости вала верхнего несущего винта, на внешней поверхности которого между несущими винтами отсутствуют вращающиеся элементы конструкции управления, при этом на верхнем несущем винте управление углами установки лопастей выполнено только по общему и дифференциальному шагу, а суммирующий механизм выполнен из трех двуплечих рычагов, шарнирно смонтированных на корпусе редуктора, первый рычаг расположен под автоматом перекоса нижнего несущего винта и кинематически соединен с ним, второй рычаг - на донной части редуктора, третий рычаг - между двумя упомянутыми, причем на одном плече третьего рычага закреплена трехплечая качалка, а другим плечом третий рычаг кинематически соединен с органами управления общим шагом лопастей обоих несущих винтов, трехплечая качалка диаметрально расположенными плечами соответственно соединена с первым двуплечим рычагом и со вторым двуплечим рычагом, который кинематически соединен с подвижной тягой, а средним плечом упомянутая трехплечая качалка кинематически соединена с органами управления дифференциальным шагом лопастей обоих несущих винтов.
Изобретение поясняется иллюстрациями, где:
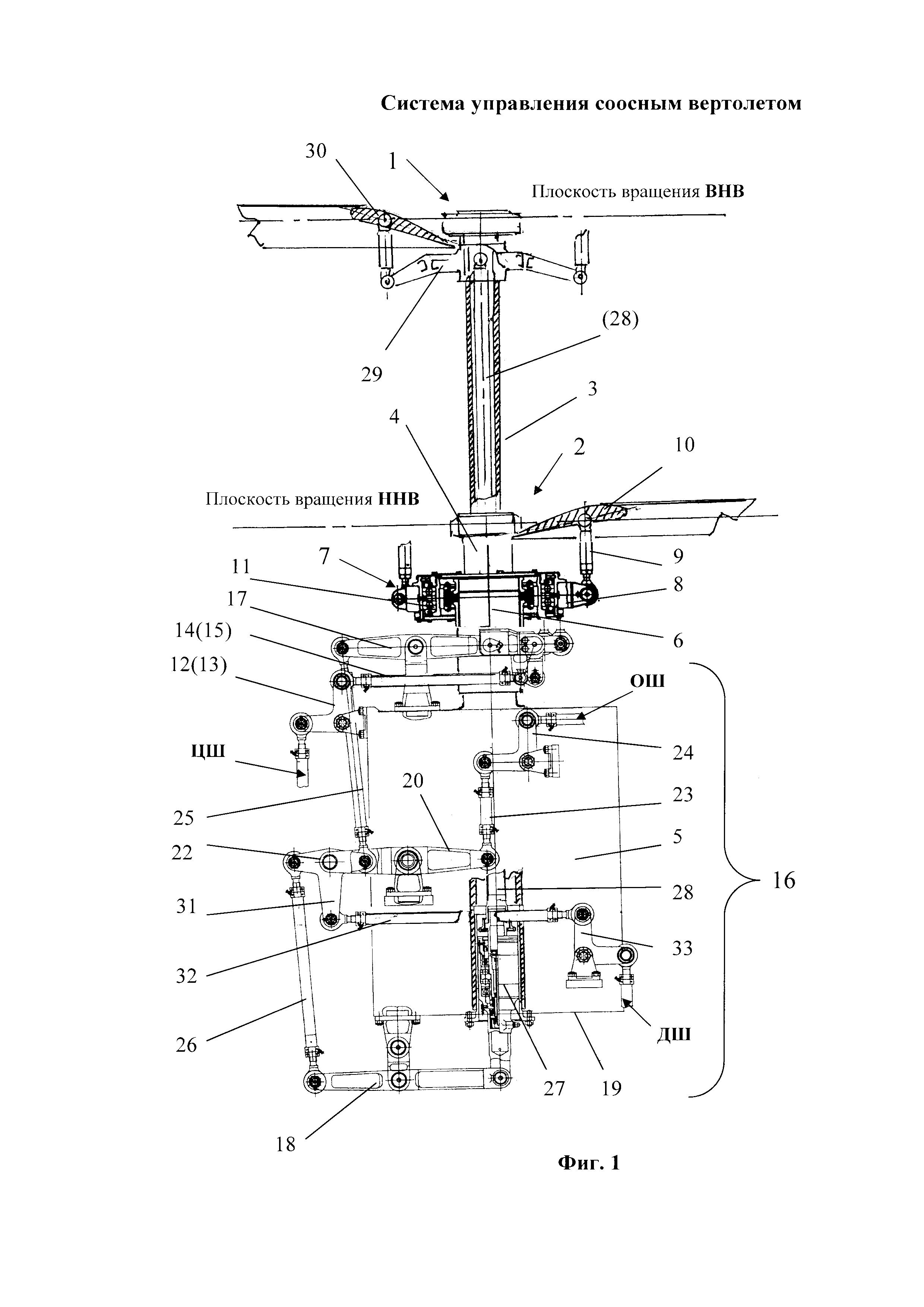
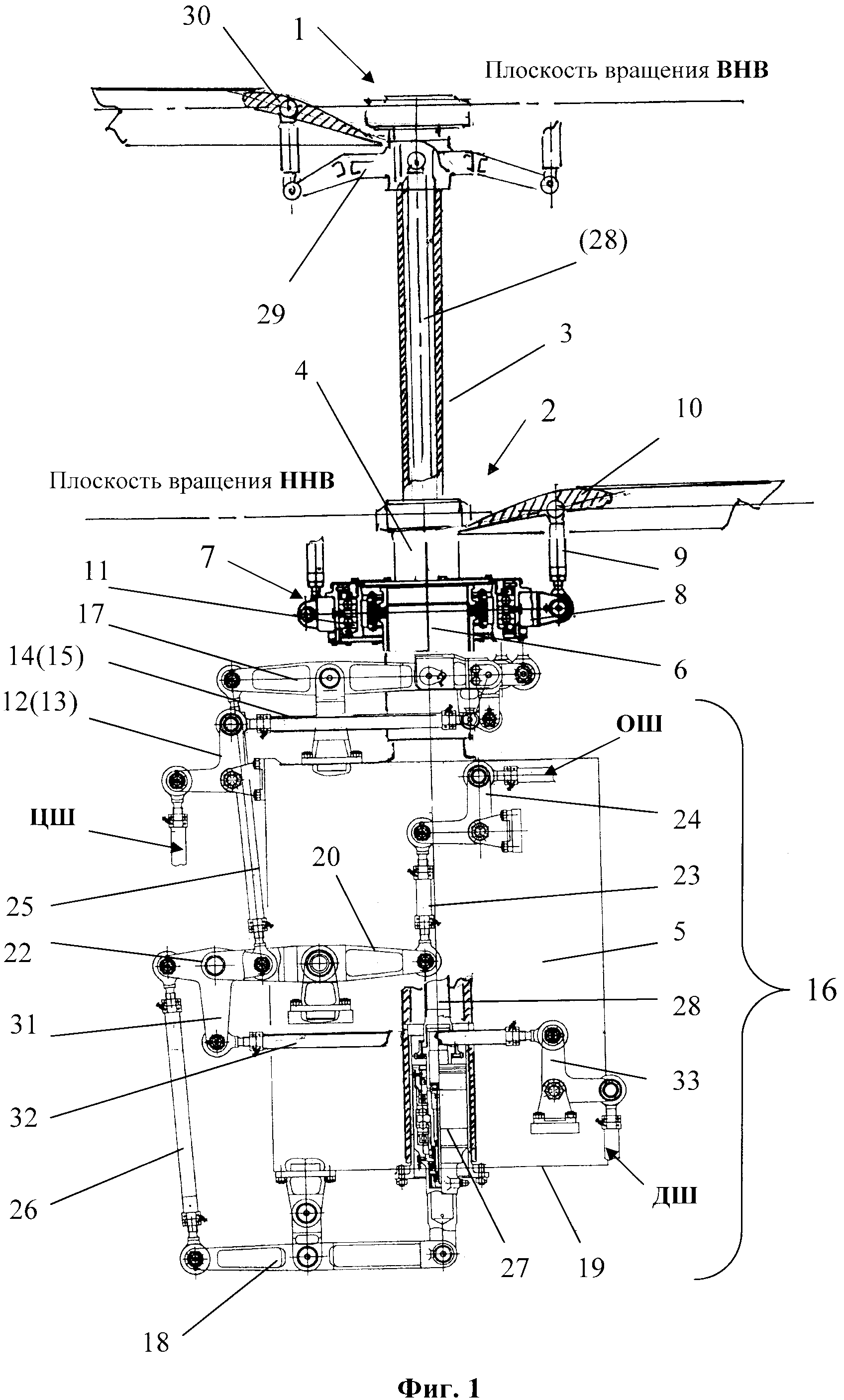
на фиг. 1 изображена кинематическая схема предлагаемой системы управления соосным вертолетом;
на фиг. 2 показано конструктивное решение третьего двуплечего рычага;
на фиг. 3 показана схема протекания воздуха через соосный несущий винт;
на фиг. 4 приведен сравнительный график мощности продольного управления на соосном вертолете и на вертолете с одиночным эквивалентным несущим винтом.
Система управления соосным вертолетом включает верхний и нижний несущие винты 1 и 2 соответственно, которые имеют противоположные вращения. Несущие винты закреплены соответственно на валах 3 и 4 редуктора 5. На редукторе 5 под нижним несущим винтом (ННВ) 2 установлен подвижный стакана 6, на котором смонтирован автомат перекоса 7 с возможностью перемещения вдоль оси вала 4. Вращающееся кольцо 8 автомата перекоса 7 посредством тяг 9 соединено с поводками (условно не показано) лопастей 10 ННВ 2, а не вращающееся кольцо 11 автомата перекоса 7 посредством качалок 12 (13) и тяг 14 (15) кинематически соединено с органами управления циклическим шагом (ЦШ) лопастей 10 ННВ 2.
Управление общим шагом и дифференциальным шагом несущих винтов 1 и 2 выполнено посредством суммирующего механизма 16, который содержит три двуплечих рычага, шарнирно смонтированных на корпусе редуктора 5. Первый двуплечий рычаг 17 установлен под автоматом перекоса 7, второй двуплечий рычаг 18 установлен на донной части 19 редуктора 7, а третий двуплечий рычаг 20 смонтирован на корпусе редуктора между двумя упомянутыми рычагами 17 и 18. При этом на одном плече рычага 20, оканчивающемся вилкой 21, шарнирно закреплена трехплечая качалка 22, а другим плечом рычаг 20 кинематически соединен с органами управления общим шагом (ОШ) лопастей обоих несущих винтов 1 и 2 (тяга 23 и качалка 24 показаны условно).
Трехплечая качалка 22 диаметрально расположенными плечами соединена посредством тяг 25 и 26 соответственно с двуплечими рычагами 17 и 18. При этом двуплечий рычаг 17 своим свободным плечом шарнирно соединен с подвижным стаканом 6, обеспечивая этим осевое перемещение автомата перекоса 7 вдоль оси вала 4 при качании качалки 22, а двуплечий рычаг 18 свободным плечом кинематически соединен с ползуном 27, установленным в полости вала 3 верхнего несущего винта (ВНВ) 1 с возможностью перемещения вдоль оси вала, при этом подвижная тяга 28 закреплена в полости ползуна 27 с возможностью вращения относительно своей продольной оси, синхронно с вращением вала 3.
В зоне плоскости вращения ВНВ на внешней поверхности вала 3 подвижно вдоль оси вала смонтирован ползун 29, кинематически соединенный с подвижной тягой 28 и поводками управления лопастями 30 ВНВ 1. Средним плечом 31 трехплечая качалка 22 посредством тяги 32 и качалки 33 кинематически соединена с органами управления дифференциальным шагом (ДШ) лопастей обоих несущих винтов 1 и 2.
Управляемость вертолетом с предложенной системой управления по каналам в продольно-поперечном направлениях осуществляется за счет изменения циклического шага лопастей только на нижнем несущем винте, по курсу и по высоте полета - за счет управления дифференциальным и общим шагом лопастей на обоих несущих винтах.
Возможность такого решения основана на особенностях соосного несущего винта. Поток воздуха при движении через соосный винт (см. Фиг. 3) как бы разделен на две области: внутреннюю 35, определяемую границами струй от верхнего несущего винта 1, и внешнюю область 36 - кольцевую, в границах струй от верхнего несущего винта 1 и нижнего несущего винта 2. Струи внутренней области 35 при прохождении плоскости вращения нижнего несущего винта сужаются ≈ на 15-20%, вследствие чего нижний несущий винт 2 получает дополнительный подсос воздуха в границах области 36. Вследствие этого сила тяги T соосного несущего винта ≈ на 8-10% превышает подъемную силу эквивалентного несущего винта.
Доминирующим аспектом в задаче балансировки вертолета, обеспечения криволинейного установившегося полета является мощность продольного управления. Применительно к предлагаемому техническому решению эффективность продольного управления характеризуется градиентом изменения циклического шага лопастей Mzδв нижнего несущего винта 2. Здесь δв величина циклического шага лопастей нижнего несущего винта 2, которая связана с углом δz отклонения равнодействующей силы тяги несущего винта при отклонении соответствующего органа управления циклическим шагом зависимостью:
δz=-δвcosσ1=Хт/Уэ;
где σ1 - угол регулятора взмаха;
Хт - величина допустимой продольной центровки вертолета;
Уэ - величина приложения равнодействующей силы тяги.
При этом величина угловых ускорений, которые возникают на вертолете при отклонении органов продольного управления по каналу циклического шага (ЦШ), характеризуется величиной Mzхв/Jz,
здесь Хв - ход рычага продольного управления, а Jz - момент инерции вертолета в связанной системе координат (см. Э.А. Петросян, «Аэродинамика соосного вертолета», Полигон-Пресс, М., 2004, стр. 53, 64-65, 237, 463-464). Эффективность продольного управления вертолетом можно описать системой уравнений
Mzхв/Jz=iхв*Mzδв/Jz
δвcosσ1=Хт/Уэ
Достаточность продольного управления с предложенной системой управления соосным вертолетом решается подбором передаточных отношений iхв между отклонениями рычагов управления по циклическому шагу и соответствующим изменением посредством автомата перекоса 7 углов δв установки лопасти 10 на нижнем несущем винте 2 во взаимосвязи с инерционными параметрами вертолета Jz и допустимого диапазона центровки Хт. Для примера на фиг. 4 иллюстрируется эффективность продольного управления Mzхв вертолета 37 с соосным несущим винтом и вертолета 38 с одиночным эквивалентным несущим винтом, показывая этим устойчивое преимущество мощности управления по продольному каналу во всем диапазоне весовых параметров (Gв) вертолетов. Это косвенно подтверждает достаточность продольно-поперечного управления вертолетом с соосными несущими винтами, используя для этой цели только нижний несущий винт, на уровне не ниже управляемости на вертолете с одиночным эквивалентным несущим винтом.
В управлении общим и дифференциальным шагом лопастей 10 и 30 на несущих винтах 2 и 1 соответственно в предложенной системе управления соосным вертолетом координирующую роль в независимости упомянутых каналов управления играет двуплечий рычаг 20.
Управление общим шагом несущих винтов 1 и 2 осуществляется угловым перемещением двуплечего рычага 20 от действия органов ОШ, который, в свою очередь, перемещает трехплечую качалку 22 и взаимосвязанные с ней тяги 25 и 26. А тяга 32, связанная со средним плечом 31 качалки 22, поворачивается относительно шарнирного узла связи ее с качалкой 33. Посредством перемещения тяг 25 и 26 происходит угловое перемещение двуплечих рычагов 17 и 18 в ту же сторону, что и рычага 20. А подбором кинематических плеч рычагов 17 и 18 и трехплечей качалки 22 обеспечивается однонаправленное и одинаковое по величине перемещение автомата перекоса 7 и ползуна 29 и соответственно перемещения поводков управления углами установки лопастей 10 и 30 нижнего и верхнего несущих винтов 2 и 1 соответственно.
Управление дифференциальным шагом несущих винтов 1 и 2, т.е. увеличение углов установки (шага) лопастей на одном из несущих винтов при одновременном уменьшении на ту же величину угла установки лопастей на другом несущем винте осуществляется угловым перемещением трехплечей качалки 22, смонтированной на трехплечем рычаге 20. От действия органов управления дифференциальным шагом (ДШ) лопастей 10 и 30 несущих винтов 2 и 1 происходит угловое перемещение плеча 31 трехплечей качалки 22 и соответственно ее других диаметрально расположенных плеч, посредством которых тяги 25 и 26 получают разнонаправленное, но одинаковое по величине перемещение. Посредством тяг 25 и 26 двуплечие рычаги 17 и 18 соответственно получают разнонаправленное угловое перемещение и воздействуют на соответствующие перемещения автомата перекоса 7 и ползуна 29, что приводит к разнонаправленному, но одинаковому по величине изменению угла установки лопастей на нижнем и верхнем несущих винтах.
Предлагаемая система управления соосным вертолетом несет в себе не только снижение вредного сопротивления самого вертолета, но и сопутствующее снижение затрат мощности на профильное и индуктивное сопротивление лопастей несущих винтов, а также простоту и компактность кинематической схемы управления соосным несущим винтом, что в совокупности обеспечивает эксплуатационные качества вертолета.
Система управления соосным вертолетом, содержащая верхний и нижний несущие винты противоположного вращения, закрепленные на валах редуктора, автомат перекоса нижнего несущего винта, суммирующий механизм управления общим и дифференциальным шагом лопастей несущих винтов, подвижную тягу, смонтированную внутри полости вала верхнего несущего винта, на внешней поверхности которого между несущими винтами отсутствуют вращающиеся элементы конструкции управления, отличающаяся тем, что на верхнем несущем винте управление углами установки лопастей выполнено только по общему и дифференциальному шагу, а суммирующий механизм выполнен их трех двуплечих рычагов, шарнирно смонтированных на корпусе редуктора, первый рычаг расположен под автоматом перекоса нижнего несущего винта и кинематически соединен с ним, второй рычаг - на донной части редуктора, третий рычаг - между двумя упомянутыми, причем на одном плече третьего рычага закреплена трехплечая качалка, а другим плечом третий рычаг кинематически соединен с органами управления общим шагом лопастей обоих несущих винтов, трехплечая качалка диаметрально расположенными плечами соответственно соединена с первым двуплечим рычагом и со вторым двуплечим рычагом, который кинематически соединен с подвижной тягой, а средним плечом упомянутая трехплечая качалка кинематически соединена с органами управления дифференциальным шагом лопастей обоих несущих винтов.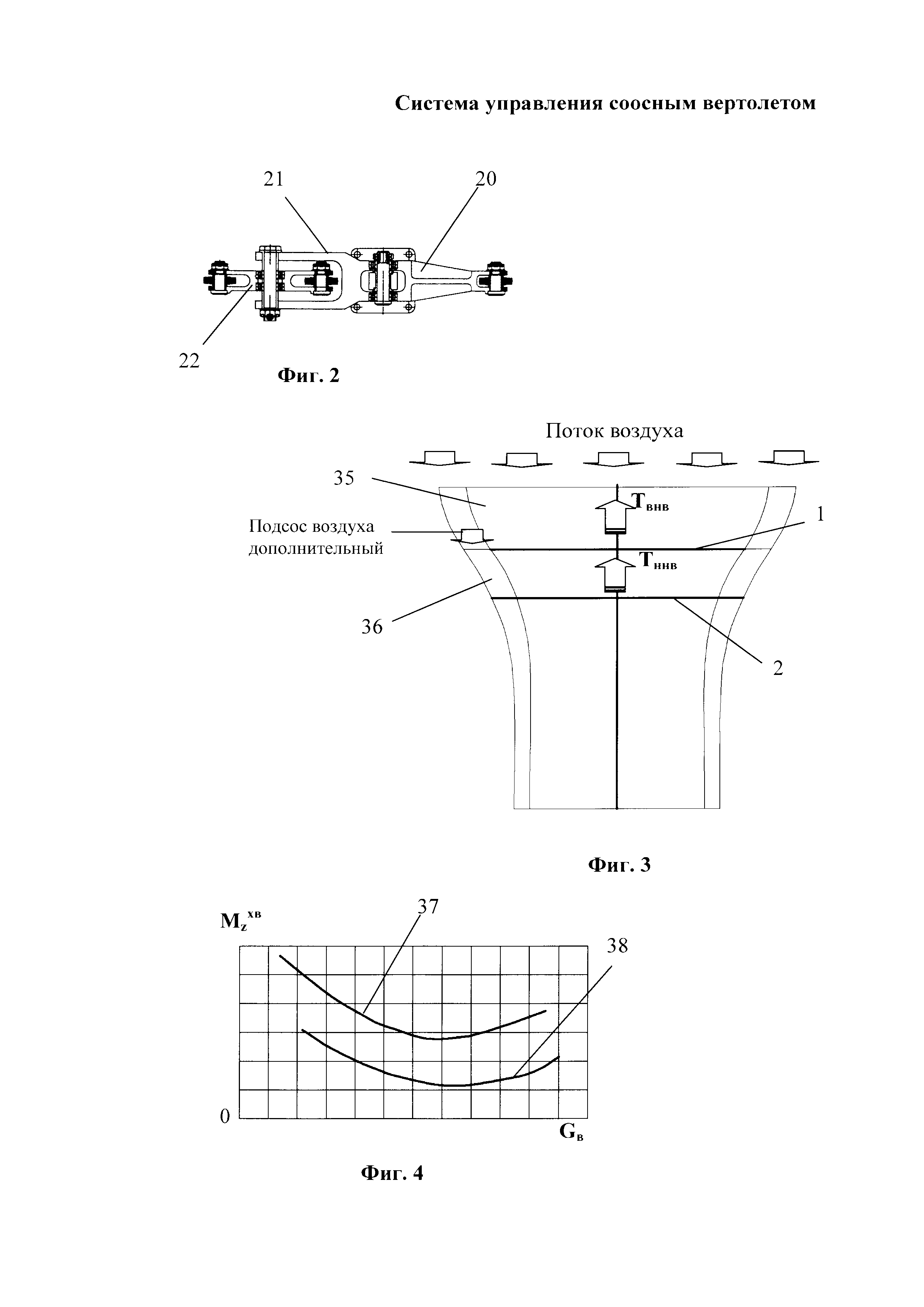
Способ экстренного всплытия во льдах подводного промышленного объекта и устройство для его осуществления
Главный редуктор несущего винта
Универсальная съемная транспортно-спасательная наделка
Съемная транспортно-спасательная водолазная наделка
Съемная транспортно-спасательная наделка
Съемная транспортно-спасательная наделка, сопрягаемая с ограждением выдвижных устройств подводного носителя
Лопасть несущего винта вертолета
Конструкция силового каркаса ветролета
Лопасть несущего винта вертолета и способ изготовления лопасти из композиционного материала
Устройство для бурения скважины
Способ экстренного всплытия во льдах подводного промышленного объекта и устройство для его осуществления
Главный редуктор несущего винта
Универсальная съемная транспортно-спасательная наделка
Съемная транспортно-спасательная водолазная наделка
Съемная транспортно-спасательная наделка
Съемная транспортно-спасательная наделка, сопрягаемая с ограждением выдвижных устройств подводного носителя
Лопасть несущего винта вертолета
Конструкция силового каркаса ветролета
Лопасть несущего винта вертолета и способ изготовления лопасти из композиционного материала
Устройство для бурения скважины

