Результат интеллектуальной деятельности: Способ управления сейсмоакустическими косами и устройство позиционирования для его осуществления
Вид РИД
Изобретение
Изобретение относится к области геофизики и может быть использовано при проведении морских сейсморазведочных работ на шельфе арктических морей в условиях сложной ледовой и погодной обстановки или иного (техногенного) загрязнения морской поверхности.
Предлагаются автоматизированный способ управления глубиной погружения, формой и расстояниями между сейсмоакустическими косами в системе, состоящей из одной или более кос, выпускаемых из донных шахт специализированного научно-исследовательского судна ледокольного класса и буксируемых за ним, и устройство для его осуществления.
В большинстве современных способов (Морская сейсморазведка / Под ред. А.Н. Телегина. - М.: ООО "Геоинформмарк", 2004. - 237 с.) осуществления геофизической разведки, 4d, 3d и 2d сейсмопрофилирования дна морских акваторий подразумевается буксировка судном-носителем системы сейсмоакустических кос. В системах с несколькими сейсмическими косами сейсмические косы буксируют под водой позади исследовательского судна практически параллельно друг другу. Для упорядочивания их расположения в пространстве традиционно используют гидропарашюты (или их аналоги), гибкую сцепку, ограничивающую максимальное расхождение кос, систему растяжек, задающую данное расхождение, хвостовой буй (или отражатель), позиционирующий хвост косы, и специализированные плавучие элементы (позиционирующие устройства), способные отклонять рабочий участок косы в ту или иную сторону в поперечном направлении («птички»). На хвостовом буе часто располагают GPS-приемник, который позволяет осуществить жесткую координатную привязку хвостового сегмента косы. Для регулирования глубины погружения антенны в ее передней части располагают груз (или "птичку"), который за счет натяжения несущего троса (или заданного птичкой направления тяги) задает начальную точку горизонтального участка косы.
Выделим наиболее очевидные технологические особенности сейсморазведки, осуществляемой традиционным способом и затрудняющие ее применение в условиях сложной ледовой и погодной обстановки:
- хвостовой буй буксируют на поверхности, что обусловлено необходимостью регистрации GPS/ГЛОНАСС данных, либо осуществления с ним радиообмена;
- рабочий участок каждой косы позиционируют механической системой грузов и растяжек, для регулировки параметров этой системы необходимо прервать рабочий цикл исследований и выбрать косы на борт судна, где и осуществляется оговоренная регулировка.
Наиболее близким по технической сущности к предлагаемому способу является описываемый патентом РФ №2516591 (Способ и система для управления сейсмическими косами: Патент на изобретение РФ №2516591: МПК G01V 1/38 / Сил Дэниель Б. (US), Грант Джон Эдвард (GB), Сеспедес М. Дэвид A. (US); Ион Геофизикал Корпорейшн (US). - Заявка №2011116289/28; дата подачи заявки 06.11.2009; дата публикации заявки 20.12.2012, Бюл. №35; дата публикации сведений о патенте 20.05.2014, Бюл. №14. - 18 с.: 6 ил.) способ управления сейсмическими косами. В указанном патенте предлагаются способ и система для управления формой и расстояниями в схеме расположения сейсмических кос, буксируемых позади исследовательского судна.
В указанном патенте предлагаются способ и система для управления формой и расстояниями в схеме расположения сейсмических кос, буксируемых позади исследовательского судна. Каждой сейсмической косой управляют в поперечном направлении посредством устройств позиционирования (так называемых устройств рулевого управления), размещенных вдоль ее длины в конкретных узлах, для достижения заданного расстояния от соседней сейсмической косы. Одной из этих действительных сейсмических кос, используемой в качестве опорной для других действительных сейсмических кос, управляют для достижения заданного расстояния от мнимой, или фантомной, сейсмической косы, виртуально буксируемой вместе с действительными сейсмическими косами.
К недостаткам указанного изобретения можно отнести то, что координатную привязку осуществляют на основании данных, поступающих на управляющий комплекс с надводных частей антенной системы (хвостовой буй сейсмической косы), наличие которых может привести к столкновению косы с плавучими препятствиями (льдинами или иными техногенными объектами) и, как следствие, ее повреждению. Также недостатком является то, что регулировку положения кос осуществляют только в поперечном направлении, что делает невозможным использование кос при низких скоростях судна или при его остановке. Кроме того, при маневрировании судна, замедлении или остановки судна (что особенно актуально для ледокола в старт-стоповом режиме хода) либо при наличии сильных течений из-за отсутствия регулировки положения кос в продольном направлении происходит провисание и сильное смещение рабочих участков кос, что приводит к неадекватному покрытию зоны исследований сетью сейсмических кос, а следовательно, к искажению и недостаточному количеству получаемых данных. В результате на тех территориальных участках шельфа, где полученной информации недостаточно, проводят дополнительные измерения, то есть снова осуществляют буксировку кос над конкретным участком для «загущения» получаемого массива данных. Недостатком также является то, что регулировку положения кос по глубине осуществляют с помощью механической системы грузов, для настройки которой требуется выборка кос на борт судна.
Кроме того, устройства позиционирования, посредством которых в прототипе предлагается управлять сейсмическими косами, используют для этого двигатели и подводные крылья. Помимо того, что это не позволяет данным устройствам осуществлять управление косами в продольном направлении, из чего автоматически вытекают многочисленные недостатки способа-прототипа, но еще эти устройства являются сильношумящими, и нигде в способе-прототипе не упомянуто о том, что производимые позиционирующими устройствами шумы существенно влияют на качество измерений, что их необходимо измерять и учитывать при обработке разведочных данных для повышения точности измерений.
Задачей, на которую направлено изобретение, является повышение точности разведочных данных, получаемых в результате измерений, производимых в процессе буксировки сейсмоакустических кос, расширение диапазона скоростей буксировки сейсмоакустических кос в сторону малых скоростей (вплоть до полной остановки судна), автоматизация отслеживания и регулировки пространственного расположения рабочих участков кос без прерывания рабочего цикла исследований, повышение сохранности сейсмоакустических кос при проведении процесса измерений.
Технический результат в части, касающейся способа, обеспечивается тем, что выпускают и буксируют за судном одну или более сейсмоакустических кос, рабочие участки которых представляют собой антенны с чувствительными элементами, оснащенных устройствами позиционирования, расположенными в разнесенных положениях вдоль длины сейсмоакустической косы, определяют форму и взаимное расположение буксируемых сейсмоакустических кос, осуществляют их коодинатную привязку и задают целевое расстояние между соседними сейсмоакустическими косами, осуществляют передачу команд рулевого управления на позиционирующие устройства для упорядочивания взаимного расположения буксируемых сейсмоакустических кос и регулировки расстояния между соседними косами, а также осуществляют управление положением буксируемых сейсмоакустических кос в поперечном направлении и управление глубиной погружения кос.
Новым является то, что сейсмоакустические косы выпускают из специализированных донных шахт в кормовой части исследовательского судна, координатную привязку осуществляют автоматизированным способом с исследовательского судна, целевое расстояние между соседними косами, а также между чувствительными элементами в каждой антенне задают в соответствии с заранее рассчитанной координатной сеткой, осуществляют управление глубиной погружения кос, а также управление положением буксируемых сейсмоакустических кос не только в поперечном, но и в продольном направлениях с помощью одних и тех же устройств автоматизированного позиционирования, корректируют расстояния между косами, расстояния между чувствительными элементами на рабочих участках косы и глубину погружения кос без прерывания рабочего цикла исследований и выбирания кос на борт судна.
Технический результат в части, касающейся устройства, обеспечивается тем, что устройство позиционирования представляет собой тело нейтральной плавучести, снабженное сцепным устройством для крепления в определенных узлах сейсмоакустической косы.
Новым является то, что корпус тела нейтральной плавучести представляет собой две герметично сопряженных полости, соединенные таким образом, что между ними образуется система сквозных каналов, соединяющих торцевые сопла и сопла у движителей, которые установлены в определенных местах системы сквозных каналов и имеют вектор тяги, регулируемый посредством шторок, размещенных на корпусе устройства возле сопел у движителей, а также тем, что оно оборудовано гидрофоном для регистрации собственных шумов и шумов обтекания набегающим потоком воды, электронным акселерометром и электронным гироскопом, акустическими дальномерами, ретранслятором цифрового потока данных.
Изобретение поясняется фиг. 1-3.
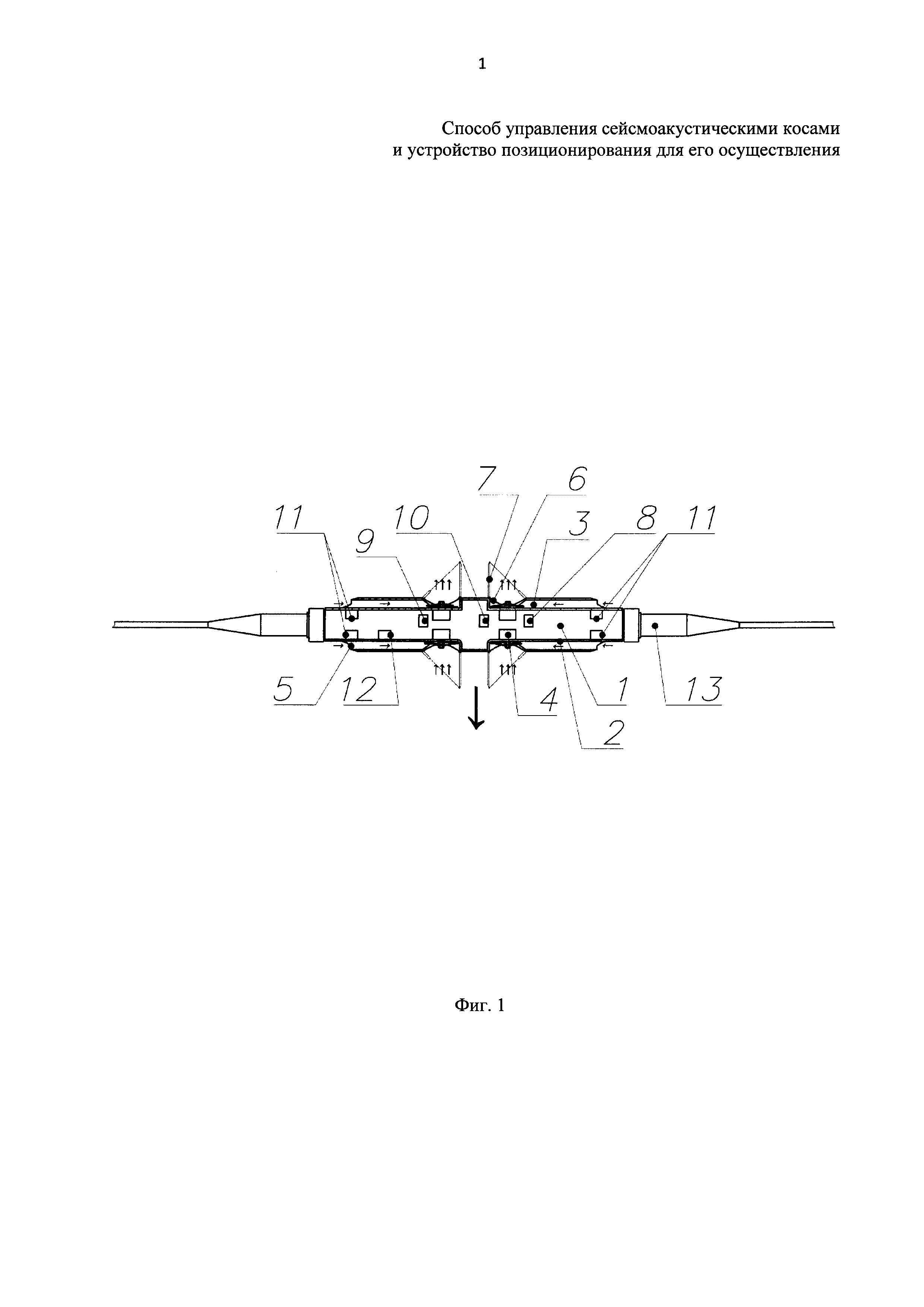
На фиг. 1 представлено устройство автоматического позиционирования для управления положением буксируемых сейсмоакустических кос: 1 - тело нейтральной плавучести, 2 - корпус тела нейтральной плавучести, состоящий из двух герметично сопряженных полостей, 3 - система сквозных каналов, образуемых сопрягаемыми полостями, 4 - движители с переменным вектором тяги (малошумные), 5 - торцевые сопла, 6 - сопла у движителей 4, 7 - шторки для регулировки просвета сопел 6 у движителей 4, 8 - гидрофон, 9 - акселерометр, 10 - электронный гироскоп, 11 - акустические дальномеры, 12 - ретранслятор цифрового потока данных, 13 - сцепное устройство для фиксации УАП в определенных узлах сейсмоакустической косы.
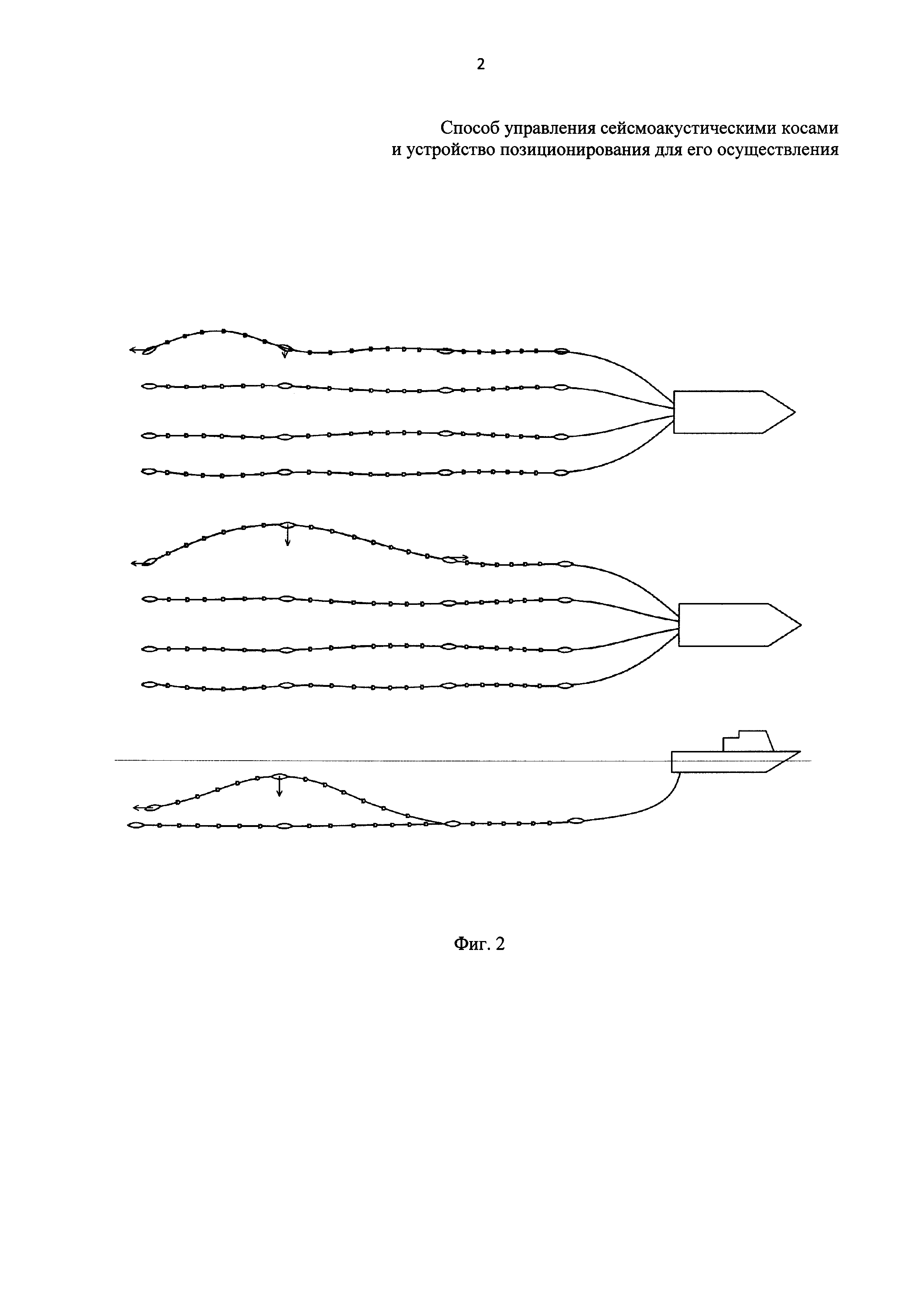
На фиг. 2 приведены различные варианты нарушения пространственного расположения антенн и направления тяги, создаваемой устройствами автоматического позиционирования для коррекции нарушения (показаны стрелками).
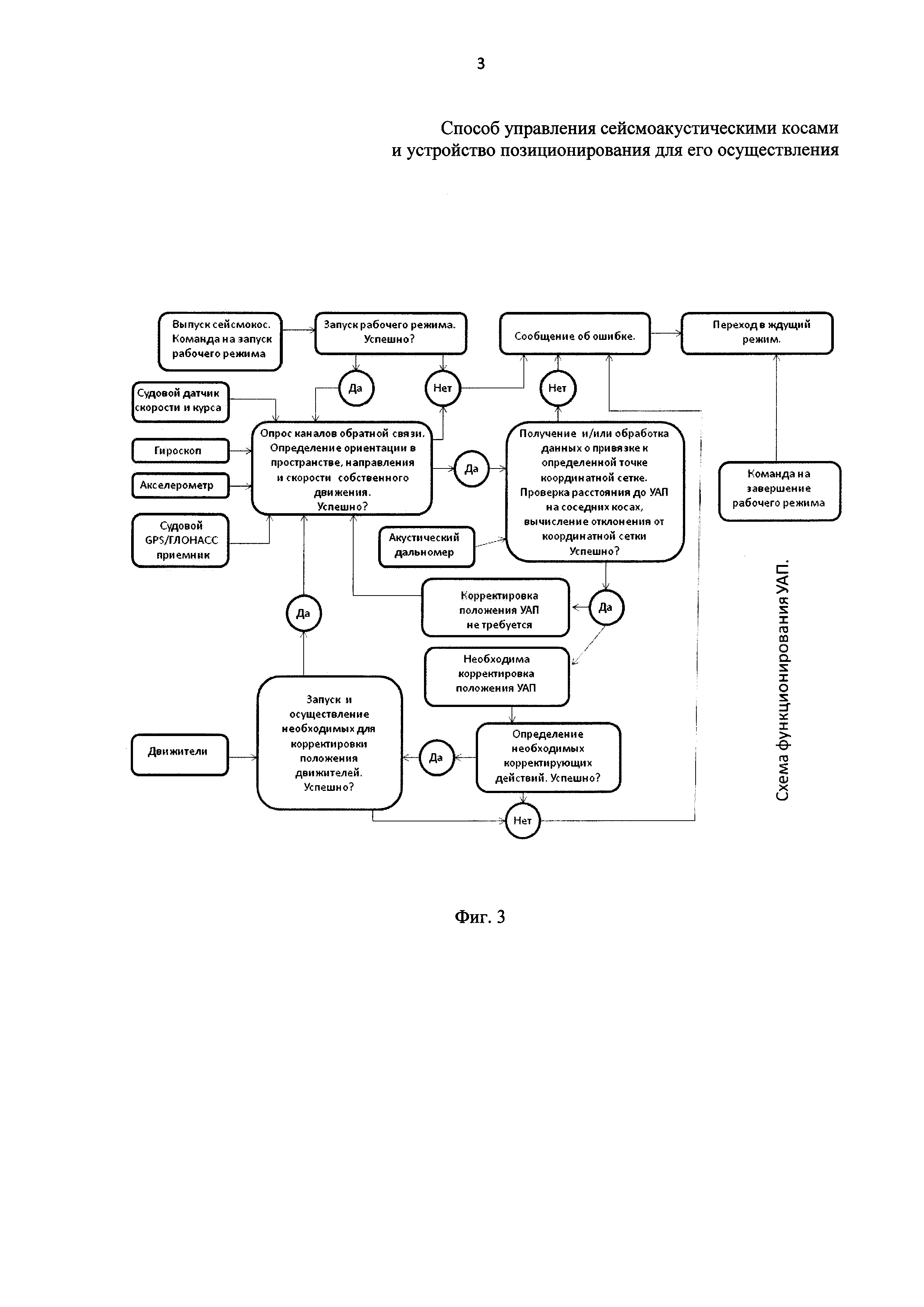
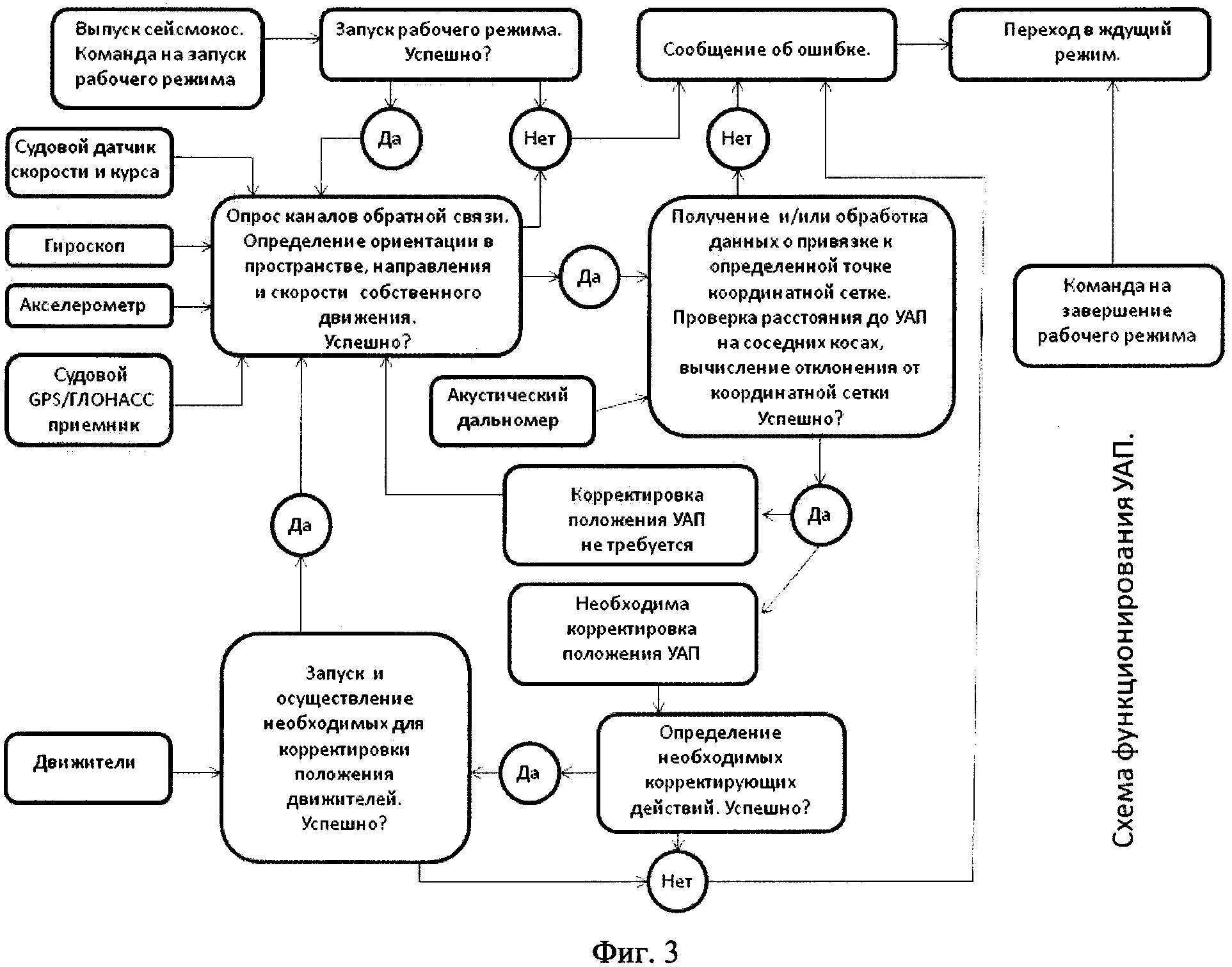
На фиг. 3 приведена блок-схема осуществления способа управления сейсмоакустическими косами с помощью устройств автоматического позиционирования.
Предлагаемое устройство автоматизированного позиционирования (везде далее УАП) представляет собой (фиг. 1) тело нейтральной плавучести 1, корпус 2 которого состоит из двух герметично сопряженных полостей, которые соединены таким образом, что образуют систему сквозных каналов 3, соединяющих торцевые сопла 5 и сопла 6 у движителей 4, которые размещены в определенных местах системы сквозных каналов 3 и имеют переменный вектор тяги, обеспечивающийся за счет регулировки просвета сопел 6 у движителей 4 (регулировка осуществляется с помощью шторок 7) и направления вращения винтов движителей 4. УАП также оборудовано гидрофоном 8 для регистрации собственных шумов и шумов обтекания набегающим потоком воды, электронным акселерометром 9 и электронным гироскопом 10, задействованными для определения скорости и пространственной ориентации устройства, узконаправленными акустическими дальномерами 11, предназначенными для определения расстояния между УАП, установленными на соседних антеннах. Кроме прочего, УАП оснащено ретранслятором цифрового потока данных 12, посредством которого подключается к общей цифровой сети передачи данных антенны и получает возможность обмениваться информацией с центральным постом управляющего комплекса, расположенным на судне-носителе. Каждый такой УАП устанавливают в определенных узлах сейсмоакустической косы и жестко фиксируют с помощью сцепного устройства 13.
Предлагаемый способ управления сейсмоакустическими косами с помощью описанного выше УАП осуществляется следующим образом.
В процессе выполнения сейсмоакустических исследований из специальных донных шахт, расположенных в кормовой части днища исследовательского судна, осуществляют выпуск одной или более сейсмоакустических кос, рабочие участки которых представляют собой твердотельные цифровые гидроакустические антенны с чувствительными элементами, и дают сигнал на запуск рабочего цикла исследований. Далее для позиционирования и задания взаимного расположения кос применяют УАП, установленные в определенных узлах антенн. Блок-схема осуществления способа управления сейсмоакустическими косами с помощью УАП приведена на фиг. 3. После получения сигнала на запуск рабочего цикла с центрального поста управляющего комплекса, расположенного на судне, каждый УАП определяет собственную ориентацию в пространстве, направление и скорость своего движения. Для этого используют данные электронного акселерометра 9 и электронного гироскопа 10. После определения указанных параметров все УАП передают их на центральный пост комплекса, используя для этого ретранслятора цифрового потока данных 12.
В ответ с центрального поста комплекса передают информацию о привязке данного УАП к определенному узлу рассчитанной заранее пространственной координатной сетки, данные о требуемом расстоянии до УАП, расположенных на соседних косах, требуемой глубине. Получив эти данные, каждый УАП с помощью акустических дальномеров 11 проверяет соответствие реальных значений указанных величин требуемым значениям. Если в процессе этого действия выявляют отклонения указанных величин от требуемых значений, с помощью УАП осуществляют их корректировку. Для этого вычисляют значение смещения, которое необходимо компенсировать. Получив данное значение, УАП включает один или несколько из соответствующих движителей 4. Способность движителей 4 работать в реверсивном режиме и система сквозных каналов 3 позволяют задействовать в этом процессе сразу несколько из общего числа движителей 4, которые усиливают действие друг друга.
Непосредственно смещение УАП осуществляют при помощи созданного движителями 4 напора воды, прокачиваемой по системе сквозных каналов 3 и направляемого в необходимую сторону с помощью шторок 7, регулирующих просвет сопел 6 у движителей 4. В зависимости от направления, в котором необходимо сместить УАП, могут производить прокачку воды от нескольких из торцевых сопел 5 к одному или нескольким из сопел 6 у движителей 4, от одного или нескольких из сопел 6 у движителей 4 к одному или нескольким другим из сопел 6 у движителей 4, от нескольких торцевых сопел 5 к нескольким другим торцевым соплам 5 и одному или нескольким из сопел 6 у движителей 4.
После придания УАП требуемого импульса, движители 4 отключают и вновь проверяют привязку к определенной точке в пространственной координатной сетке. Если вновь выявляется наличие отклонения, то процесс повторяют. Если отклонение не выявляют, то УАП переводят в режим мониторинга положения, в котором периодически проверяется привязка устройства к координатной сетке и осуществляются постоянные попытки выявления отклонений в расположении УАП. При выявлении таких отклонений вновь запускают процесс корректировки положения (фиг. 2).
Посредством ретранслятора цифрового потока данных 12 от каждого УАП также передают информацию от гидрофонов, установленных на одной с ним косе, к центральному посту комплекса.
Если в процессе осуществления исследовательским комплексом соответствующих изысканий возникает необходимость изменить глубину погружения кос или расстояние между ними, то на все УАП передают информацию с новыми данными о требуемых расстояниях между УАП и требуемой глубине. Все УАП начинают манипулировать движителями 4 для приведения указанных параметров в соответствие новым требованиям. Этот процесс продолжается до тех пор, пока не установят, что параметры пространственного расположения и глубина каждого УАП соответствуют новым требованиям.
Если в процессе осуществления исследовательским комплексом соответствующих изысканий скорость судна падает или оно останавливается, на все УАП подают сигнал на включение движителей 4 таким образом, чтобы поддерживать рабочее положение антенн.
Таким образом, определение и корректировку пространственного положения рабочего участка каждой сейсмоакустической косы осуществляют автоматизированным способом, с помощью специализированного программного обеспечения управляющего комплекса на судне, для чего, наряду с заблаговременно составленным описанием геометрических параметров системы антенн и судна, используют данные о скорости и курсе судна, а также данные электронного акселерометра 9, электронного гироскопа 10 и данные от акустических дальномеров 11, расположенных в каждом УАП, и GPS/ГЛОНАСС данные, получаемые от соответствующего судового приемника.
Гидрофон 8 УАП предназначен для регистрации шумов, возникающих при работе УАП и шумов от обтекания УАП набегающим потоком жидкости. Цифровую запись этих шумов передают в центральный пост управляющего комплекса, где в последствии используется для их учета при обработке сейсмоданных.
Можно отметить, что в отличие от способа-прототипа, в котором регулировку пространственного положения косы в поперечном направлении и по глубине осуществляют с помощью нескольких различных устройств, в предлагаемом способе дополнительно осуществляют еще и регулировку в продольном направлении, т.е. регулировку расстояния между чувствительными элементами на рабочих участках косы, причем делают это все с помощью одного и того же устройства - УАП.
Чувствительные элементы на рабочих участках косы (гидрофоны) оборудованы гироскопами и акселерометрами. С учетом их жесткой привязки к УАП посредством кабеля можно однозначно определять их положение, что дает возможность осуществлять регулировку их положения в пространстве и относительно друг друга. При обнаружении отклонения положения какого-либо УАП или чувствительного элемента от определенного положения в заблаговременно рассчитанной трехмерной координатной сетке, вычисляют величину этого отклонения. На отклонившееся УАП, либо на ближайшее к отклонившемуся чувствительному элементу УАП подают команду на включение соответствующих из движителей 4 с переменным вектором тяги для компенсации обнаруженного отклонения. Далее определяют новое положение отклонившегося чувствительного элемента и повторно вычисляют величину отклонения от координатной сетки. При превышении величиной отклонения порогового значения вновь подают сигнал на включение соответствующих из движителей 4 для компенсации отклонения. С помощью таких манипуляций осуществляют последовательную минимизацию величины отклонения и, таким образом, упорядочивают расположение чувствительных элементов в координатной сетке. Манипуляции по корректировке положения отклонившихся чувствительных элементов продолжают до тех пор, пока величина отклонения не станет меньше порогового значения, величину которого задают заблаговременно. Отслеживание и корректировку положения чувствительных элементов антенны осуществляют постоянно на протяжении рабочего цикла исследований.
Таким образом, используя для реализации способа управления сейсмоакустическими косами предлагаемое устройство (УАП), можно решить поставленную для данного изобретения задачу и реализовать следующие преимущества предлагаемого способа.
Повысить точность разведочных данных. Результат достигается за счет непрерывного поддержания кос в рабочем состоянии на протяжении всего цикла измерений, а также за счет использования в УАП малошумных движителей и возможности учета искажений, вносимых ими в результаты измерений.
Расширить диапазон скоростей буксировки сейсмоакустических кос в сторону малых скоростей (вплоть до полной остановки судна). Это достигается за счет непрерывного поддержания кос в рабочем состоянии и в нужном пространственном положении в соответствии с заданной координатной сеткой на протяжении всего цикла измерений, что позволяет исключить отклонение или провисание кос при замедлении судна, в том числе при его остановке.
Автоматизировать отслеживание и регулировку пространственного расположения рабочих участков кос без прерывания рабочего цикла исследований. Результат достигается за счет использования для регулировки пространственного положения кос набора УАП, для настройки которых и для осуществления функций которых не требуется выборка кос на борт судна.
Повысить сохранности сейсмоакустических кос при проведении процесса измерений. Отсутствие у измерительного оборудования (кос) надводных частей (буев, поплавков, тросов и т.п.) в совокупности с тем, что косы выпускаются из донных шахт, минимизирует возможность повреждения антенн о плавучие препятствия.
Оптический вентиль с компенсацией термонаведенной деполяризации в магнитном поле
Ячейка поккельса для мощного лазерного излучения
Способ создания легированных дельта-слоев в cvd алмазе
Способ различения аномалий на водной поверхности средствами многочастотной свч-радиолокации
Пассивный способ обнаружения транспортного средства по его собственному акустическому шуму
Способ определения температурного коэффициента скорости ультразвука
Твердотельный усилитель лазерного излучения с диодной накачкой с большим коэффициентом усиления и высокой средней мощностью
Изолятор фарадея с кристаллическим магнитооптическим ротатором для лазеров большой мощности
Устройство для выращивания профилированных кристаллов из раствора
Плазменный свч реактор
Оптический вентиль с компенсацией термонаведенной деполяризации в магнитном поле
Ячейка поккельса для мощного лазерного излучения
Способ создания легированных дельта-слоев в cvd алмазе
Способ различения аномалий на водной поверхности средствами многочастотной свч-радиолокации
Пассивный способ обнаружения транспортного средства по его собственному акустическому шуму
Способ определения температурного коэффициента скорости ультразвука
Твердотельный усилитель лазерного излучения с диодной накачкой с большим коэффициентом усиления и высокой средней мощностью
Изолятор фарадея с кристаллическим магнитооптическим ротатором для лазеров большой мощности
Устройство для выращивания профилированных кристаллов из раствора
Плазменный свч реактор

