Результат интеллектуальной деятельности: Самонастраивающийся электропривод манипулятора
Вид РИД
Изобретение
Изобретение относится к робототехнике и может быть использовано для создания систем управления приводами манипуляторов.
Известен электропривод робота, содержащий последовательно соединенные первый блок умножения, первый сумматор, усилитель и двигатель, связанные с первым датчиком скорости непосредственно и через редуктор – с первым датчиком положения, выход которого соединен с первым входом второго сумматора, подключенного вторым входом к входу устройства, последовательно соединенные второй датчик положения, третий сумматор, второй вход которого подключен к выходу первого задатчика сигнала, четвертый сумматор, второй вход которого подключен к выходу второго задатчика сигнала, первый квадратор, второй блок умножения, второй вход которого подключен к выходу датчика массы и первому входу третьего блока умножения, второй вход которого подключен к выходу четвертого сумматора, пятый сумматор, соединенный вторым входом с выходом третьего задатчика сигнала, а третьим входом через квадратор - с выходом третьего сумматора и первым входом шестого сумматора, соединенного вторым входом – с выходом третьего блока умножения, а выходом с первым входом четвертого блока умножения, соединенного вторым входом с выходом второго датчика скорости, а выходом - с первым входом пятого блока умножения, второй вход которого подключен к выходу первого датчика скорости, первому входу седьмого сумматора, через релейный блок к первому входу восьмого сумматора и ко второму входу восьмого сумматора, причем второй вход седьмого сумматора соединен с выходом второго сумматора, а выход – с первым входом первого блока умножения, третий вход восьмого сумматора соединен с выходом пятого блока умножения, а выход восьмого сумматора подключен ко второму входу первого сумматора, последовательно соединенные четвертый задатчик сигнала, девятый сумматор, второй вход которого соединен с выходом пятого сумматора и вторым входом первого блока умножения, шестой и седьмой блоки умножения и десятый сумматор, выход которого подключен к четвертому входу восьмого сумматора, последовательно соединенные пятый задатчик сигнала и одиннадцатый сумматор, а также восьмой блок умножения, выход которого подключен к второму входу десятого сумматора, последовательно соединенные третий датчик скорости и третий квадратор, выход которого соединен с вторым входом шестого блока умножения, последовательно соединенные усилитель и синусный функциональный преобразователь, выход которого подключен ко второму входу седьмого блока умножения, а первый вход восьмого блока умножения через косинусный функциональный преобразователь соединен с выходом первого датчика положения и входом усилителя, первый датчик ускорения и девятый блок умножения, выход которого подключен ко второму входу восьмого блока умножения, его первый и второй входы соединены соответственно с выходами шестого и одиннадцатого сумматоров, а второй вход последнего подключен к выходу первого датчика ускорения (см. патент РФ № 2398672, МПК B25J13/00, 2010).
Недостатком этого устройства является то, что в электроприводе рассматриваемого манипулятора не учтена, считаясь малой, электрическая постоянная времени. В результате это устройство не будет точно компенсировать все его переменные нагрузочные характеристики и обеспечивать требуемую динамическую точность работы.
Известно также устройство для управления приводом робота, содержащее последовательно соединенные первый блок умножения и первый сумматор, последовательно подключенные усилитель и двигатель, связанные с первым датчиком скорости непосредственно и через редуктор с первым датчиком положения, выход которого соединен с первым входом второго сумматора, подключенного вторым входом к входу устройства, последовательно соединенные второй датчик положения, третий сумматор, четвертый сумматор, первый квадратор и второй блок умножения, второй вход которого подключен к выходу датчика массы и первому входу третьего блока умножения, а выход – к первому входу пятого сумматора, соединенного вторым входом с выходом первого задатчика постоянного сигнала, а третьим входом – с выходом второго квадратора, вход которого подключен к выходу третьего сумматора и первому входу шестого сумматора, соединенного выходом с первым входом четвертого блока умножения, а вторым входом – с выходом третьего блока умножения, второй вход которого подключен к выходу четвертого сумматора, соединенного вторым входом с выходом второго задатчика постоянного сигнала, выход третьего задатчика постоянного сигнала подключен к второму входу третьего сумматора, а выход второго датчика скорости соединен с вторым входом четвертого блока умножения, а также пятый блок умножения, седьмой сумматор и последовательно соединенные релейный блок и восьмой сумматор, выход которого подключен к второму входу первого сумматора, выходом соединенного с входом усилителя, причем выход первого датчика скорости подключен к входу релейного блока, второму входу восьмого сумматора и первому входу седьмого сумматора, второй вход которого соединен с выходом второго сумматора, а выход – с первым входом первого блока умножения, подключенного вторым входом к выходу пятого сумматора, первый вход пятого блока умножения соединен с выходом четвертого блока умножения, его второй вход – с выходом первого датчика скорости, а выход – с третьим входом восьмого сумматора, последовательно соединенные четвертый задатчик постоянного сигнала, девятый сумматор, второй вход которого соединен с выходом пятого сумматора, шестой и седьмой блоки умножения и десятый сумматор, выход которого подключен к четвертому входу восьмого сумматора, последовательно соединенные пятый задатчик постоянного сигнала, одиннадцатый сумматор, второй вход которого соединен с выходом шестого сумматора, и восьмой блок умножения, выход которого подключен к второму входу десятого сумматора, последовательно соединенные третий датчик скорости и третий квадратор, выход которого соединен с вторым входом шестого блока умножения, последовательно соединенные третий датчик положения, второй усилитель и первый функциональный преобразователь, выход которого подключен к второму входу седьмого блока умножения, а второй вход восьмого блока умножения через второй функциональный преобразователь соединен с выходом третьего датчика положения, первый датчик ускорения, установленный на выходном валу двигателя, девятый блок умножения, первый вход которого подключен к выходу четвертого блока умножения, его второй вход – к третьему входу первого сумматора и выходу первого датчика ускорения, а выход – к пятому входу восьмого сумматора, последовательно соединенные четвертый квадратор, десятый блок умножения, двенадцатый сумматор и одиннадцатый блок умножения, выход которого соединен с шестым входом восьмого сумматора, последовательно соединенные двенадцатый блок умножения, первый вход которого подключен к выходу третьего датчика скорости, тринадцатый блок умножения, второй вход которого соединен с выходом второго датчика ускорения, тринадцатый сумматор, четырнадцатый блок умножения, второй вход которого подключен к выходу девятого сумматора, четырнадцатый сумматор, выход которого соединен с седьмым входом восьмого сумматора, последовательно соединенные пятнадцатый, шестнадцатый и семнадцатый блоки умножения, последовательно соединенные третий функциональный преобразователь, вход которого подключен к выходу второго усилителя, восемнадцатый блок умножения, второй вход которого соединен с выходом третьего квадратора и вторым входом семнадцатого блока умножения, девятнадцатый блок умножения, выход которого подключен к второму входу тринадцатого сумматора, последовательно соединенные четвертый функциональный преобразователь, вход которого подключен к выходу третьего датчика положения, двадцатый блок умножения, второй вход которого подключен к выходу одиннадцатого сумматора, и двадцать первый блок умножения, второй вход которого соединен с вторыми входами одиннадцатого и девятнадцатого блоков умножения, а также с выходом первого датчика скорости, а его выход – с третьим выходом четырнадцатого сумматора, последовательно соединенные двадцать второй блок умножения, первый вход которого подключен к выходу второго функционального преобразователя, и двадцать третий блок умножения, второй вход которого соединен с выходом второго датчика скорости, входом четвертого квадратора и вторым входом шестнадцатого блока умножения, а его выход – с четвертым входом четырнадцатого сумматора, последовательно соединенные шестой задатчик постоянного сигнала и пятнадцатый сумматор, второй вход которого подключен к выходу датчика массы, а выход – к второму входу десятого блока умножения, последовательно соединенные третий датчик ускорения и двадцать четвертый блок умножения, второй вход которого подключен к выходу шестого сумматора и первому входу пятнадцатого блока умножения, второй вход которого соединен с выходом первого функционального преобразователя и вторым входом двенадцатого блока умножения, а выход семнадцатого блока умножения подключен к второму входу четырнадцатого сумматора (см. Патент РФ № 2054350, МПК B25J13/00, 1996).
Это устройство по своей технической сущности является наиболее близким к предлагаемому решению.
Недостатком прототипа также является то, что в нем отсутствует полная инвариантность динамических свойств рассматриваемого электропривода к непрерывным изменениям его моментных нагрузочных характеристик, поскольку в нем рассматривается манипулятор с другой кинематической схемой. Поэтому возникает задача построения такой самонастраивающейся коррекции, которая обеспечила бы высокую динамическую точность работы именно рассматриваемого электропривода с учетом всех действующих на него моментных воздействий.
Технической задачей, на решение которой направлено заявляемое техническое решение, является обеспечение полной инвариантности динамических свойств рассматриваемого электропривода к непрерывным и быстрым изменениям его моментных нагрузочных характеристик при движении манипулятора одновременно по всем степеням подвижности.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного сигнала управления, подаваемого на вход электропривода, который обеспечивает получение моментного воздействия, необходимого для обеспечения полной инвариантности его показателей качества к непрерывно изменяющимся параметрам нагрузки.
Поставленная задача решается тем, что в самонастраивающийся электропривод манипулятора, содержащий последовательно соединенные первый блок умножения, первый сумматор, усилитель и электродвигатель, связанные с первым датчиком скорости непосредственно и через редуктор – с первым датчиком положения, выход которого соединен с первым входом второго сумматора, подключенного вторым входом к входу устройства, последовательно соединенные второй датчик положения, установленный в третьей степени подвижности манипулятора, третий сумматор, второй вход которого подключен к выходу первого задатчика сигнала, четвертый сумматор, второй вход которого подключен к выходу второго задатчика сигнала, первый квадратор, второй блок умножения, пятый сумматор, соединенный вторым входом с выходом третьего задатчика сигнала, а третьим - через второй квадратор - с выходом третьего сумматора, последовательно соединенные третий блок умножения, первый вход которого подключен к выходу датчика массы, и ко второму входу второго блока умножения, а второй - к выходу четвертого сумматора, шестой сумматор, подключенный вторым входом к выходу третьего сумматора, четвертый блок умножения, подключенный вторым входом к выходу второго датчика скорости, установленного в третьей степени подвижности манипулятора, и пятый блок умножения, второй вход которого подключен к выходу первого датчика скорости, к первому входу седьмого сумматора, через релейный блок - к первому входу восьмого сумматора и ко второму входу восьмого сумматора, причем второй вход седьмого сумматора подключен к выходу второго сумматора, а выход – к первому входу первого блока умножения, третий вход восьмого сумматора подключен к выходу пятого блока умножения, а выход - ко второму входу первого сумматора, последовательно соединенные четвертый задатчик сигнала, девятый сумматор, второй вход которого подключен к выходу пятого сумматора и второму входу первого блока умножения, шестой и седьмой блоки умножения и десятый сумматор, выход которого подключен к четвертому входу восьмого сумматора, последовательно соединенные пятый задатчик сигнала и одиннадцатый сумматор, а также восьмой блок умножения, выход которого подключен ко второму входу десятого сумматора, последовательно соединенные третий датчик скорости, установленный в первой степени подвижности манипулятора, и третий квадратор, выход которого соединен со вторым входом шестого блока умножения, последовательно соединенные третий датчик положения, установленный во второй степени подвижности манипулятора, второй усилитель и первый синусный функциональный преобразователь, выход которого подключен к второму входу седьмого блока умножения, а первый вход восьмого блока умножения через второй косинусный функциональный преобразователь соединен с выходом третьего датчика положения, первый датчик ускорения, установленный на выходном валу электродвигателя, девятый блок умножения, первый вход которого подключен к выходу четвертого блока умножения, его второй вход – к третьему входу первого сумматора и к выходу первого датчика ускорения, а выход – к пятому входу восьмого сумматора, последовательно соединенные четвертый квадратор, десятый блок умножения, двенадцатый сумматор и одиннадцатый блок умножения, выход которого подключен к шестому входу восьмого сумматора, последовательно соединенные двенадцатый блок умножения, первый вход которого подключен к выходу третьего датчика скорости, тринадцатый блок умножения, второй вход которого подключен к выходу второго датчика ускорения, установленного в первой степени подвижности манипулятора, тринадцатый сумматор, четырнадцатый блок умножения, второй вход которого подключен к выходу девятого сумматора, четырнадцатый сумматор, выход которого подключен к седьмому входу восьмого сумматора, последовательно соединенные пятнадцатый, шестнадцатый и семнадцатый блоки умножения, выход последнего подключен к второму входу четырнадцатого сумматора, последовательно соединенные третий косинусный функциональный преобразователь, вход которого подключен к выходу второго усилителя, восемнадцатый блок умножения, второй вход которого подключен к выходу третьего квадратора и второму входу семнадцатого блока умножения, и девятнадцатый блок умножения, выход которого подключен ко второму входу тринадцатого сумматора, последовательно соединенные четвертый синусный функциональный преобразователь, вход которого подключен к выходу третьего датчика положения, и двадцатый блок умножения, а также двадцать первый блок умножения, первый вход которого подключен к вторым входам одиннадцатого и девятнадцатого блоков умножения, а также к выходу первого датчика скорости, а выход – к третьему входу четырнадцатого сумматора, последовательно соединенные двадцать второй блок умножения, первый вход которого подключен к выходу второго косинусного функционального преобразователя, и двадцать третий блок умножения, второй вход которого подключен к выходу второго датчика скорости, входу четвертого квадратора и второму входу шестнадцатого блока умножения, последовательно соединенные шестой задатчик сигнала и пятнадцатый сумматор, второй вход которого подключен к выходу датчика массы, а выход – к вторым входам десятого и двадцать второго блоков умножения, последовательно соединенные третий датчик ускорения, установленный в третьей степени подвижности манипулятора, и двадцать четвертый блок умножения, выход которого подключен ко второму входу двенадцатого сумматора, второй вход - к выходу шестого сумматора и первому входу пятнадцатого блока умножения, второй вход которого подключен к выходу первого синусного функционального преобразователя и второму входу двенадцатого блока умножения, дополнительно вводятся четвертый датчик ускорения, установленный в четвертой степени подвижности манипулятора, выход которого подключен ко второму входу одиннадцатого сумматора, и двадцать пятый блок умножения, выход которого подключен ко второму входу восьмого блока умножения, а также последовательно соединенные дифференциатор, подключенный входом к выходу четвертого датчика ускорения, двадцать пятый блок умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя, и двадцать шестой блок умножения, второй вход которого подключен к выходу шестого сумматора, второму входу двадцатого блока умножения и первому входу двадцать пятого блока умножения, а выход - к четвертому входу четырнадцатого сумматора, а также двадцать седьмой и двадцать восьмой блоки умножения, первые входы которых подключены к выходу одиннадцатого сумматора и к второму входу двадцать пятого блока умножения, вторые входы - к выходам двадцатого и двадцать третьего блоков умножения соответственно, а выходы двадцать седьмого и двадцать восьмого блоков умножения подключены соответственно к второму входу двадцать первого блока умножения и к пятому входу четырнадцатого сумматора.
Сопоставительный анализ заявляемого технического решения с его аналогами и прототипом свидетельствует о его соответствии критерию «Новизна».
Заявленная совокупность признаков, приведенная в отличительной части формулы изобретения, позволяет добиться повышения динамической точности управления рассматриваемым электроприводом манипулятора в условиях существенного и быстрого изменения параметров нагрузки, обусловленного взаимовлиянием между всеми его степенями подвижности.
Блок-схема предлагаемого самонастраивающегося электропривода манипулятора представлена на фиг.1. На фиг.2 представлена его кинематическая схема.
Самонастраивающийся электропривод манипулятора содержит последовательно соединенные первый блок 1 умножения, первый сумматор 2, усилитель 3 и электродвигатель 4, связанные с первым датчиком 5 скорости непосредственно и через редуктор 6 – с первым датчиком 7 положения, выход которого соединен с первым входом второго сумматора 8, подключенного вторым входом к входу устройства, последовательно соединенные второй датчик 9 положения, установленный в третьей степени подвижности манипулятора, третий сумматор 10, второй вход которого подключен к выходу первого задатчика 11 сигнала, четвертый сумматор 12, второй вход которого подключен к выходу второго задатчика 13 сигнала, первый квадратор 14, второй блок 15 умножения, пятый сумматор 17, соединенный вторым входом с выходом третьего задатчика 18 сигнала, а третьим - через второй квадратор 19 - с выходом третьего сумматора 10, последовательно соединенные третий блок 20 умножения, первый вход которого подключен к выходу датчика 16 массы и ко второму входу второго блока 15 умножения, а второй - к выходу четвертого сумматора 12, шестой сумматор 21, подключенный вторым входом к выходу третьего сумматора 10, четвертый блок 22 умножения, подключенный вторым входом к выходу второго датчика 23 скорости, установленного в третьей степени подвижности манипулятора, и пятый блок 24 умножения, второй вход которого подключен к выходу первого датчика 5 скорости, к первому входу седьмого сумматора 25, через релейный блок 26 - к первому входу восьмого сумматора 27 и ко второму входу восьмого сумматора 27, причем второй вход седьмого сумматора 25 подключен к выходу второго сумматора 8, а выход – к первому входу первого блока 1 умножения, третий вход восьмого сумматора 27 подключен к выходу пятого блока 24 умножения, а выход - ко второму входу первого сумматора 2, последовательно соединенные четвертый задатчик 28 сигнала, девятый сумматор 29, второй вход которого подключен к выходу пятого сумматора 17 и второму входу первого блока 1 умножения, шестой 30 и седьмой 31 блоки умножения и десятый сумматор 32, выход которого подключен к четвертому входу восьмого сумматора 27, последовательно соединенные пятый задатчик 33 сигнала и одиннадцатый сумматор 34, а также восьмой блок 35 умножения, выход которого подключен ко второму входу десятого сумматора 32, последовательно соединенные третий датчик 36 скорости, установленный в первой степени подвижности манипулятора, и третий квадратор 37, выход которого соединен со вторым входом шестого блока 30 умножения, последовательно соединенные третий датчик 38 положения, установленный во второй степени подвижности манипулятора, второй усилитель 39 и первый синусный функциональный преобразователь 40, выход которого подключен к второму входу седьмого блока умножения 31, а первый вход восьмого блока 35 умножения через второй косинусный функциональный преобразователь 41 соединен с выходом третьего датчика 38 положения, первый датчик 42 ускорения, установленный на выходном валу электродвигателя 4, девятый блок 43 умножения, первый вход которого подключен к выходу четвертого блока 22 умножения, его второй вход – к третьему входу первого сумматора 2 и к выходу первого датчика 42 ускорения, а выход – к пятому входу восьмого сумматора 27, последовательно соединенные четвертый квадратор 44, десятый блок 45 умножения, двенадцатый сумматор 46 и одиннадцатый блок 47 умножения, выход которого подключен к шестому входу восьмого сумматора 27, последовательно соединенные двенадцатый блок 48 умножения, первый вход которого подключен к выходу третьего датчика 36 скорости, тринадцатый блок 49 умножения, второй вход которого подключен к выходу второго датчика 50 ускорения, установленного в первой степени подвижности манипулятора, тринадцатый сумматор 51, четырнадцатый блок 52 умножения, второй вход которого подключен к выходу девятого сумматора 29, четырнадцатый сумматор 53, выход которого подключен к седьмому входу восьмого сумматора 27, последовательно соединенные пятнадцатый 54, шестнадцатый 55 и семнадцатый 56 блоки умножения, выход последнего подключен к второму входу четырнадцатого сумматора 53, последовательно соединенные третий косинусный функциональный преобразователь 57, вход которого подключен к выходу второго усилителя 39, восемнадцатый блок 58 умножения, второй вход которого подключен к выходу третьего квадратора 37 и второму входу семнадцатого блока 56 умножения, и девятнадцатый блок 59 умножения, выход которого подключен ко второму входу тринадцатого сумматора 51, последовательно соединенные четвертый синусный функциональный преобразователь 60, вход которого подключен к выходу третьего датчика 38 положения, и двадцатый блок 61 умножения, а также двадцать первый блок 62 умножения, первый вход которого подключен к вторым входам одиннадцатого 47 и девятнадцатого 59 блоков умножения, а также к выходу первого датчика 5 скорости, а выход – к третьему входу четырнадцатого сумматора 53, последовательно соединенные двадцать второй блок 63 умножения, первый вход которого подключен к выходу второго косинусного функционального преобразователя 41, и двадцать третий блок 64 умножения, второй вход которого подключен к выходу второго датчика 23 скорости, входу четвертого квадратора 44 и второму входу шестнадцатого блока 55 умножения, последовательно соединенные шестой задатчик 65 сигнала и пятнадцатый сумматор 66, второй вход которого подключен к выходу датчика 16 массы, а выход – к вторым входам десятого 45 и двадцать второго 63 блоков умножения, последовательно соединенные третий датчик 67 ускорения, установленный в третьей степени подвижности манипулятора, и двадцать четвертый блок 68 умножения, выход которого подключен ко второму входу двенадцатого сумматора 46, второй вход - к выходу шестого сумматора 21 и первому входу пятнадцатого блока 54 умножения, второй вход которого подключен к выходу первого синусного функционального преобразователя 40 и второму входу двенадцатого блока 48 умножения, четвертый датчик 69 ускорения, установленный в четвертой степени подвижности манипулятора, выход которого подключен ко второму входу одиннадцатого сумматора 34, и двадцать пятый блок 70 умножения, выход которого подключен ко второму входу восьмого блока 35 умножения, а также последовательно соединенные дифференциатор 71, подключенный входом к выходу четвертого датчика 69 ускорения, двадцать пятый блок 72 умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя 41, и двадцать шестой блок 73 умножения, второй вход которого подключен к выходу шестого сумматора 21, второму входу двадцатого блока 61 умножения и первому входу двадцать пятого блока 70 умножения, а выход - к четвертому входу четырнадцатого сумматора 53, а также двадцать седьмой 74 и двадцать восьмой 75 блоки умножения, первые входы которых подключены к выходу одиннадцатого сумматора 34 и к второму входу двадцать пятого блока 70 умножения, вторые входы - к выходам двадцатого 61 и двадцать третьего 64 блоков умножения соответственно, а выходы двадцать седьмого 74 и двадцать восьмого 75 блоков умножения подключены соответственно к второму входу двадцать первого блока 62 умножения и к пятому входу четырнадцатого сумматора 53. Объект управления 76.
На фиг. 1 и 2 введены следующие обозначения:  - сигнал желаемого положения;
- сигнал желаемого положения;  - соответствующие обобщенные координаты манипулятора;
- соответствующие обобщенные координаты манипулятора;  - скорости изменения соответствующих обобщенных координат;
- скорости изменения соответствующих обобщенных координат;  - скорость и ускорение вращения ротора электродвигателя соответственно;
- скорость и ускорение вращения ротора электродвигателя соответственно;  - передаточное отношение редуктора;
- передаточное отношение редуктора;  - ускорения первой и четвертой обобщенных координат соответственно;
- ускорения первой и четвертой обобщенных координат соответственно;  - ошибка электропривода (величина рассогласования);
- ошибка электропривода (величина рассогласования);  - соответственно массы первого, второго звеньев манипулятора и захваченного груза;
- соответственно массы первого, второго звеньев манипулятора и захваченного груза;  - расстояние от оси вращения второго звена до его центра масс при
- расстояние от оси вращения второго звена до его центра масс при  ;
;  - расстояние от центра масс второго звена до средней точки схвата;
- расстояние от центра масс второго звена до средней точки схвата;  - соответственно усиливаемый сигнал и сигнал управления электродвигателем 4.
- соответственно усиливаемый сигнал и сигнал управления электродвигателем 4.
Устройство работает следующим образом. Сигнал ошибки  на выходе второго сумматора 8 после коррекции в первом блоке 1 умножения, первом сумматоре 2, седьмом сумматоре 25, усиливаясь, поступает на электродвигатель 4, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от величины поступающего сигнала , моментов трения и внешнего моментного воздействия
на выходе второго сумматора 8 после коррекции в первом блоке 1 умножения, первом сумматоре 2, седьмом сумматоре 25, усиливаясь, поступает на электродвигатель 4, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от величины поступающего сигнала , моментов трения и внешнего моментного воздействия  .
.
Электропривод при работе с различными грузами, а также за счет взаимовлияния степеней подвижности манипулятора обладает переменными моментными характеристиками, которые могут меняться в широких пределах. Это снижает качественные показатели электропривода и даже приводит к потере устойчивости его работы.
Рассматриваемый электропривод управляет обобщенной координатой  Его моментные характеристики зависят от изменения параметров нагрузки. Поэтому для качественного управления координатой
Его моментные характеристики зависят от изменения параметров нагрузки. Поэтому для качественного управления координатой  необходимо точно компенсировать отрицательное влияние изменения этой нагрузки на динамические свойства рассматриваемого электропривода.
необходимо точно компенсировать отрицательное влияние изменения этой нагрузки на динамические свойства рассматриваемого электропривода.
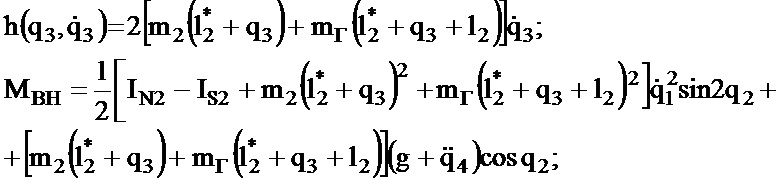
На основе уравнений Лагранжа II рода можно показать, что моментное воздействие на выходной вал электропривода, управляющего координатой , при движении манипулятора (см. фиг. 2) с грузом имеет вид:
 ,
,
где ;
; 
g - ускорение свободного падения;  ,
, - соответственно, момент инерции второго звена относительно его продольной оси и момент инерции этого звена относительно оси, проходящей через его центр масс и перпендикулярной продольной оси.
- соответственно, момент инерции второго звена относительно его продольной оси и момент инерции этого звена относительно оси, проходящей через его центр масс и перпендикулярной продольной оси.
С учетом соотношений (1) и (2), а также уравнений механической  и электрической
и электрической  цепей электродвигателя постоянного тока рассматриваемый электропривод, управляющий координатой , можно описать следующим дифференциальным уравнением:
цепей электродвигателя постоянного тока рассматриваемый электропривод, управляющий координатой , можно описать следующим дифференциальным уравнением:

где




 - активное сопротивление якорной цепи электродвигателя; I - момент инерции якоря электродвигателя и вращающихся частей редуктора, приведенных к валу этого электродвигателя;
- активное сопротивление якорной цепи электродвигателя; I - момент инерции якоря электродвигателя и вращающихся частей редуктора, приведенных к валу этого электродвигателя;  - коэффициент крутящего момента;
- коэффициент крутящего момента;  - коэффициент противо-ЭДС;
- коэффициент противо-ЭДС;  - коэффициент вязкого трения;
- коэффициент вязкого трения;  - момент сухого трения;
- момент сухого трения;  - коэффициент усиления усилителя 3;
- коэффициент усиления усилителя 3;  - ток якоря электродвигателя.
- ток якоря электродвигателя.
Из формул (2) и (3) видно, что параметры этого уравнения, а следовательно, и параметры электропривода, управляющего координатой , являются существенно переменными, зависящими от величин  . В результате в процессе работы этого электропривода меняются (притом существенно) его динамические свойства. Таким образом, для реализации поставленной задачи необходимо сформировать такое корректирующее устройство, которое застабилизировало бы параметры рассматриваемого электропривода так, чтобы он описывался дифференциальным уравнением с постоянными желаемыми параметрами.
. В результате в процессе работы этого электропривода меняются (притом существенно) его динамические свойства. Таким образом, для реализации поставленной задачи необходимо сформировать такое корректирующее устройство, которое застабилизировало бы параметры рассматриваемого электропривода так, чтобы он описывался дифференциальным уравнением с постоянными желаемыми параметрами.
Первый положительный вход седьмого сумматора 25 (со стороны второго сумматора 8) имеет единичный коэффициент усиления, а его второй отрицательный вход - коэффициент усиления  В результате на выходе седьмого сумматора 25 формируется сигнал
В результате на выходе седьмого сумматора 25 формируется сигнал 
Положительные входы третьего 10 и четвертого 12 сумматоров имеют единичные коэффициенты усиления. Второй датчик 9 положения измеряет обобщенную координату  . Первый задатчик 11 сигнала вырабатывает сигнал , а второй задатчик 13 – сигнал . В результате на выходе третьего сумматора 10 формируется сигнал
. Первый задатчик 11 сигнала вырабатывает сигнал , а второй задатчик 13 – сигнал . В результате на выходе третьего сумматора 10 формируется сигнал  а на выходе четвертого сумматора 12 – сигнал
а на выходе четвертого сумматора 12 – сигнал  . Датчик 16 массы измеряет величину
. Датчик 16 массы измеряет величину  . Поэтому на выходе второго блока 15 умножения формируется сигнал
. Поэтому на выходе второго блока 15 умножения формируется сигнал  , а на выходе второго квадратора 19 – сигнал
, а на выходе второго квадратора 19 – сигнал  С выхода третьего задатчика 18 сигнала на второй положительный единичный вход пятого сумматора 17 поступает сигнал, равный
С выхода третьего задатчика 18 сигнала на второй положительный единичный вход пятого сумматора 17 поступает сигнал, равный  . Поскольку первый (со стороны второго блока 15 умножения) и третий (со стороны второго квадратора 19) положительные входы пятого сумматора 17 соответственно имеют единичный коэффициент усиления и коэффициент усиления, равный
. Поскольку первый (со стороны второго блока 15 умножения) и третий (со стороны второго квадратора 19) положительные входы пятого сумматора 17 соответственно имеют единичный коэффициент усиления и коэффициент усиления, равный  , то на его выходе формируется сигнал
, то на его выходе формируется сигнал  (2), а на выходе первого блока 1 умножения – сигнал
(2), а на выходе первого блока 1 умножения – сигнал 
На выходе третьего блока 20 умножения формируется сигнал  первый положительный вход шестого сумматора 21 (со стороны третьего блока 20 умножения) имеет коэффициент усиления 2, а его второй положительный вход – коэффициент усиления
первый положительный вход шестого сумматора 21 (со стороны третьего блока 20 умножения) имеет коэффициент усиления 2, а его второй положительный вход – коэффициент усиления  . В результате на выходе четвертого блока 22 умножения формируется сигнал
. В результате на выходе четвертого блока 22 умножения формируется сигнал  (2), так как второй датчик 23 скорости измеряет
(2), так как второй датчик 23 скорости измеряет  , а на выходе пятого блока 24 умножения – сигнал
, а на выходе пятого блока 24 умножения – сигнал  .
.
На выходе пятого задатчика 33 сигнала формируется сигнал g, третий датчик 38 положения измеряет обобщенную координату  , а четвертый датчик 69 ускорения - ускорение
, а четвертый датчик 69 ускорения - ускорение  . Первый и второй положительные входы одиннадцатого сумматора 34 имеют коэффициенты усиления, равные 1/2, поэтому на выходе восьмого блока 35 умножения формируется сигнал
. Первый и второй положительные входы одиннадцатого сумматора 34 имеют коэффициенты усиления, равные 1/2, поэтому на выходе восьмого блока 35 умножения формируется сигнал

Четвертый задатчик 28 сигнала вырабатывает сигнал  Первый отрицательный (со стороны четвертого задатчика 28 сигнала) и второй положительный входы девятого сумматора 29 имеют коэффициенты усиления 1/2. В результате на его выходе формируется сигнал
Первый отрицательный (со стороны четвертого задатчика 28 сигнала) и второй положительный входы девятого сумматора 29 имеют коэффициенты усиления 1/2. В результате на его выходе формируется сигнал
 .
.
Третий датчик 36 скорости измеряет скорость  а второй усилитель 39 имеет коэффициент усиления, равный 2. В результате на выходе седьмого блока 31 умножения формируется сигнал
а второй усилитель 39 имеет коэффициент усиления, равный 2. В результате на выходе седьмого блока 31 умножения формируется сигнал

Положительные входы десятого сумматора 32 имеют единичные коэффициенты усиления, поэтому на его выходе формируется сигнал  (2).
(2).
Выходной сигнал релейного блока 26 имеет вид  где
где  - величина момента сухого трения при движении.
- величина момента сухого трения при движении.
Первый датчик 42 ускорения измеряет ускорение  В результате на выходе девятого блока 43 умножения формируется сигнал
В результате на выходе девятого блока 43 умножения формируется сигнал  На выходе шестого задатчика 65 сигнала формируется сигнал m2, поэтому на выходе пятнадцатого сумматора 66, имеющего положительные входы с коэффициентами усиления, равными 2, формируется сигнал
На выходе шестого задатчика 65 сигнала формируется сигнал m2, поэтому на выходе пятнадцатого сумматора 66, имеющего положительные входы с коэффициентами усиления, равными 2, формируется сигнал  . Третий датчик 67 ускорения измеряет ускорение
. Третий датчик 67 ускорения измеряет ускорение  , поэтому на выходе двенадцатого сумматора 46, имеющего два положительных входа с единичными коэффициентами усиления, формируется сигнал
, поэтому на выходе двенадцатого сумматора 46, имеющего два положительных входа с единичными коэффициентами усиления, формируется сигнал 
Второй датчик 50 ускорения измеряет ускорение  Первый (со стороны тринадцатого блока 49 умножения) и второй положительные входы тринадцатого сумматора 51 соответственно имеют единичный коэффициент усиления и коэффициент усиления, равный
Первый (со стороны тринадцатого блока 49 умножения) и второй положительные входы тринадцатого сумматора 51 соответственно имеют единичный коэффициент усиления и коэффициент усиления, равный  В результате на выходе этого сумматора формируется сигнал
В результате на выходе этого сумматора формируется сигнал  , так как
, так как  , а на выходе четырнадцатого блока 52 умножения – сигнал
, а на выходе четырнадцатого блока 52 умножения – сигнал
 .
.
На выходе семнадцатого блока 56 умножения формируется сигнал  , на выходе двадцать первого блока 62 умножения – сигнал
, на выходе двадцать первого блока 62 умножения – сигнал  , на выходе двадцать третьего блока 64 умножения - сигнал
, на выходе двадцать третьего блока 64 умножения - сигнал  на выходе двадцать восьмого блока 75 умножения – сигнал
на выходе двадцать восьмого блока 75 умножения – сигнал  , а на выходе двадцать шестого блока 73 умножения – сигнал
, а на выходе двадцать шестого блока 73 умножения – сигнал  .
.
Первый (со стороны четырнадцатого блока 52 умножения) положительный вход четырнадцатого сумматора 53 имеет коэффициент усиления 2/ip, второй (со стороны семнадцатого блока 56 умножения), четвертый (со стороны шестого блока 73 умножения) и пятый (со стороны двадцать восьмого блока 75 умножения) положительные, а также третий отрицательный (со стороны двадцать первого блока 62 умножения) - коэффициенты усиления 1/(2ip). В результате на выходе четырнадцатого сумматора 53 формируется сигнал  (2).
(2).
Первый (со стороны релейного блока 26), второй (со стороны первого датчика 5 скорости), третий (со стороны пятого блока 24 умножения) и четвертый (со стороны десятого сумматора 32) положительные входы восьмого сумматора 27 соответственно имеют коэффициенты усиления 1,  а его пятый (со стороны девятого блока 43 умножения), шестой (со стороны одиннадцатого блока 47 умножения) и седьмой (со стороны четырнадцатого сумматора 53) положительные входы - коэффициенты усиления
а его пятый (со стороны девятого блока 43 умножения), шестой (со стороны одиннадцатого блока 47 умножения) и седьмой (со стороны четырнадцатого сумматора 53) положительные входы - коэффициенты усиления  соответственно. В результате на выходе восьмого сумматора 27 формируется сигнал
соответственно. В результате на выходе восьмого сумматора 27 формируется сигнал
 .
.
Первый (со стороны первого блока 1 умножения), второй (со стороны восьмого сумматора 27) и третий положительные входы первого сумматора 2 соответственно имеют коэффициенты усиления  В результате на выходе этого сумматора формируется сигнал
В результате на выходе этого сумматора формируется сигнал
Поскольку при движении электропривода  достаточно точно соответствует
достаточно точно соответствует  , то сигнал (4), как несложно убедиться, обеспечивает превращение уравнения (3) с существенно переменными параметрами в уравнение с номинальными постоянными желаемыми параметрами
, то сигнал (4), как несложно убедиться, обеспечивает превращение уравнения (3) с существенно переменными параметрами в уравнение с номинальными постоянными желаемыми параметрами  обеспечивающими рассматриваемому электроприводу манипулятора заданные динамические свойства и показатели качества, поскольку величины
обеспечивающими рассматриваемому электроприводу манипулятора заданные динамические свойства и показатели качества, поскольку величины  заранее выбираются, исходя из требований к качеству работы электропривода.
заранее выбираются, исходя из требований к качеству работы электропривода.
Технологическая линия для переработки золошлаковых отходов - продуктов сжигания угольного топлива
Электропривод робота
Электропривод манипулятора
Генератор энергии
Генератор энергии
Генератор энергии
Генератор энергии
Технологическая линия для переработки золошлаковых отходов - продуктов сжигания угольного топлива
Способ криосохранения морских микроводорослей
Судно снабжения подводной нефтедобывающей платформы
Способ формирования ультратонкой пленки
Электропривод манипулятора
Способ формирования ультратонкой пленки
Способ получения антифрикционной композиции
Подводный генератор отпугивающих звуков
Электропривод робота
Электропривод робота
Способ неразрушающего контроля деталей из полимерных композиционных материалов
Технологическая линия для переработки золошлаковых отходов - продуктов сжигания угольного топлива
Электропривод робота

