Роботизированная система удаления зубов
Вид РИД
Изобретение
Изобретение относится к области медицинской техники, а именно к стоматологии хирургической, и предназначено для удаления зубов и их корней.
Известны универсальные щипцы экстракции 3-х моляров в разделе современные стоматологические материалы (http://www.adk.spb.ru/index.php?r=item/userView&id=32), содержащие рукояти и рабочие части.
Однако известное устройство имеет ограниченное применение и не обеспечивает эффективного, предсказуемого и атравматичного удаления зубов и их корней. С целью дистанционного удаления зубов и их корней при любой локализации их, конструкция состоит из основания, к которому неподвижно крепятся по восемь пар с каждой стороны цилиндры телескопических гидроцилиндров, к концевым штокам неподвижно крепятся кожухи движущих механизмов, к которым неподвижно крепятся шестерни поворота, к ним же неподвижно крепятся оси поворота, на которых подвижно крепятся вилки поворота, на которых неподвижно с двух противоположных сторон стоящие друг против друга крепятся статоры электродвигателей поворота, к их роторам неподвижно крепятся ведущие шестерни поворота. К вилкам поворота неподвижно крепятся с двух противоположных сторон стоящие друг против друга статоры электродвигателей движения, а к их роторам неподвижно крепятся ведущие шестерни движения. К вилкам поворота неподвижно крепятся оси колес движения, на которых подвижно крепятся колеса движения.
К основанию подвижно крепятся четыре гидравлических штока гидроцилиндров шаровыми фиксаторами, их цилиндры фиксированы подвижно к корпусу шаровыми фиксаторами.
К корпусу неподвижно фиксирована ось поворота, на которой подвижно фиксирована шестерня поворота, которая неподвижно фиксирована к головному концу. К корпусу неподвижно с двух противоположных сторон стоящие друг против друга фиксированы статоры электродвигателей поворота головного конца, на роторах которых неподвижно фиксированы ведущие шестерни поворота головного конца. К головному концу 28 неподвижно фиксирован цилиндр телескопического гидроцилиндра, на концевом штоке подвижно фиксированы три рабочих механизма, которые состоят из ведущих частей и ведомых частей. Ведущие части подвижно фиксированы на концевом штоке при помощи двух движущих механизмов рабочих частей стоящих на противоположных сторонах друг против друга и по две пары с каждой противоположной стороны стоящих против друг друга относительно продольной оси конечного штока шарикоподшипников, которые состоят из шариков, обойм с направляющими. Обойма неподвижно фиксирована к штокам гидроцилиндров, а их цилиндры неподвижно фиксированы к корпусу ведущей части.
К основаниям ведущих механизмов рабочих частей подвижно фиксированы четыре цилиндра гидроцилиндров шаровыми фиксаторами, а их штоки подвижно фиксированы к корпусу ведущей части шаровыми фиксаторами. К основанию ведущего механизма неподвижно фиксирована ось поворота и шестерня поворота ведущего механизма рабочих частей, на оси подвижно фиксирована вилка поворота ведущего механизма рабочих частей. К ней неподвижно фиксированы по два статора электродвигателей поворота, стоящих на противоположных сторонах против друг друга, на роторах которых неподвижно фиксированы ведущие шестерни поворота ведущих механизмов рабочих частей. К вилке ведущего механизма рабочих частей неподвижно фиксированы две пары статоров электродвигателей движения ведущих механизмов рабочих частей, стоящих под углом к друг другу 100°. На их роторах неподвижно фиксированы ведущие шестерни движения ведущих механизмов рабочих частей. К ней же неподвижно фиксирована ось движения, на которой подвижно фиксировано ведущее колесо ведущего механизма рабочих частей. Между основанием ведущего механизма рабочих частей и вилкой расположен шарикоподшипник. Ведомая часть состоит из рамы, к которой подвижно фиксированы по четыре цилиндра гидроцилиндров соединения шаровыми фиксаторами, их штоки подвижно фиксированы к основанию ведущей части шаровыми фиксаторами. К нижним поверхностям ведущей части и ведомой части подвижно во фронтальной плоскости фиксированы по два штока рабочих гидроцилиндров стержневыми фиксаторами, их цилиндры подвижно фиксированы во фронтальной плоскости штифтовыми фиксаторами к основанию щечек, к которым неподвижно фиксированы к нижним сторонам два боковых пера, на внутренних сторонах которых имеются пазы в виде ласточкиного хвоста, в которых подвижно фиксировано среднее перо, к нему в верхней части неподвижно фиксирован шток гидроцилиндра, а его цилиндр неподвижно фиксирован к основанию щечек.
Роботизированная система удаления зубов
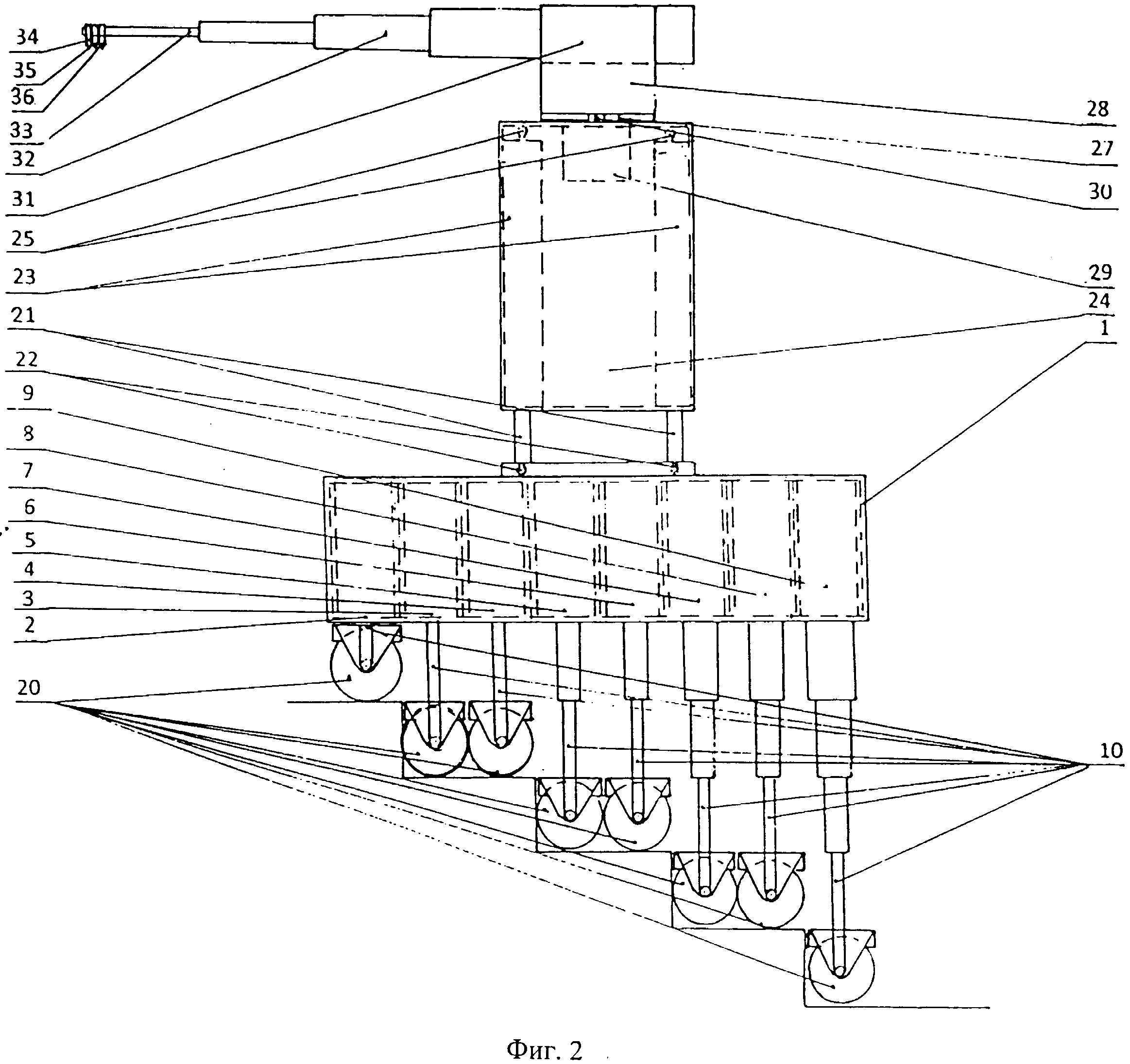
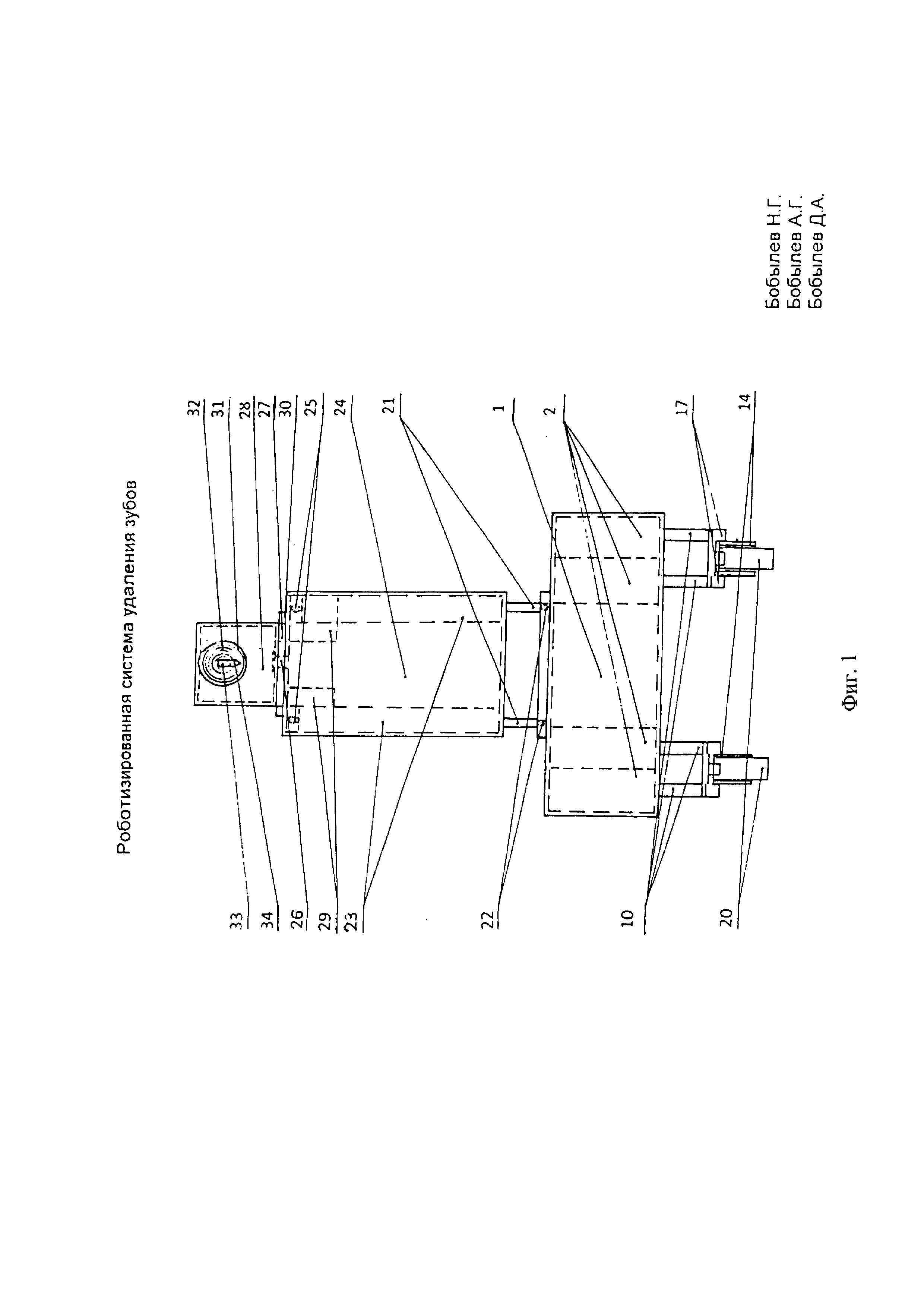
На фиг. 1 и 2 изображена роботизированная система удаления зубов в фас и профиль.
На фиг. 3 и 4 изображен движущий механизм роботизированной системы удаления зубов в фас и профиль.
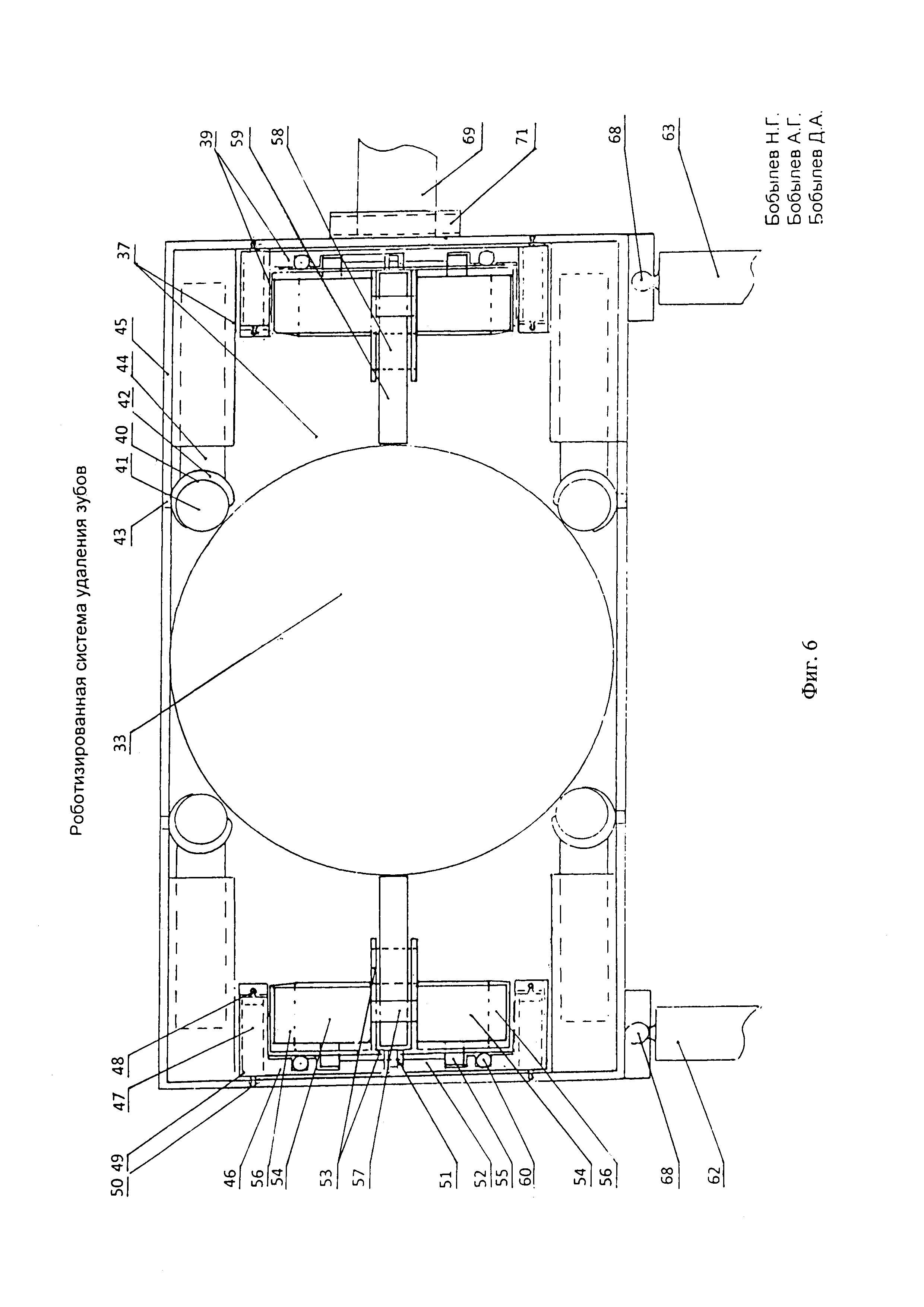
На фиг. 5 и 6 изображен движущий механизм рабочей части роботизированной системы удаления зубов в фас и профиль.
На фиг. 7 и 8 изображена рабочая часть роботизированной системы удаления больших коренных зубов в фас и профиль
На фиг. 9 и 10 изображена рабочая часть роботизированной системы удаления резцов, клыков, малых коренных зубов, корней в фас и профиль.
Роботизированная система удаления зубов (фиг. 1, 2) состоит из основания 1, к которому неподвижно крепятся по восемь пар с каждой стороны цилиндры телескопических гидроцилиндров 2, 3, 4, 5, 6, 7, 8, 9, к концевым штокам 10 (Фиг. 3, 4) неподвижно крепятся кожухи 11 движущих механизмов, к которым неподвижно крепятся шестерни поворота 12, к ним же неподвижно крепятся оси поворота 13, на которых подвижно крепятся вилки поворота 14, на которых неподвижно с двух противоположных сторон стоящие друг против друга крепятся статоры электродвигателей поворота 15, к их роторам неподвижно крепятся ведущие шестерни поворота 16. К вилкам поворота неподвижно крепятся с двух противоположных сторон стоящие друг против друга статоры электродвигателей движения 17, а к их роторам неподвижно крепятся ведущие шестерни движения 18. К вилкам поворота 14 неподвижно крепятся оси колес движения 19, на которых подвижно крепятся колеса движения 20.
К основанию 1 (Фиг. 1, 2) подвижно крепятся четыре гидравлических штока гидроцилиндров 21 шаровыми фиксаторами 22, их цилиндры 23 фиксированы подвижно к корпусу 24 шаровыми фиксаторами 25.
К корпусу 24 неподвижно фиксирована ось поворота 26, на которой подвижно фиксирована шестерня поворота 27, которая неподвижно фиксирована к головному концу 28. К корпусу 24 неподвижно с двух противоположных сторон стоящие друг против друга фиксированы статоры электродвигателей поворота 29 головного конца 28, на роторах которых неподвижно фиксированы ведущие шестерни 30 поворота головного конца 28. К головному концу 28 неподвижно фиксирован цилиндр 31 телескопического гидроцилиндра 32, на концевом штоке 33 подвижно фиксированы три рабочих механизма 34, 35, 36, которые состоят (Фиг. 8, 10) из ведущих частей 37 и ведомых частей 38. Ведущие части 37 (Фиг. 5, 6, 8, 10) подвижно фиксированы на концевом штоке 33 при помощи двух движущих механизмов рабочих частей 39 (Фиг. 5, 6), стоящих на противоположных сторонах друг против друга и по две пары с каждой противоположной стороны стоящих против друг друга относительно продольной оси конечного штока 33 шарикоподшипников 40, которые состоят из шариков 41, обойм 42 с направляющими 43. Обойма 42 неподвижно фиксирована к штокам гидроцилиндров 44, а их цилиндры неподвижно фиксированы к корпусу 45 ведущей части 37.
К основаниям 46 ведущих механизмов рабочих частей 39 подвижно фиксированы четыре цилиндра гидроцилиндров 47 шаровыми фиксаторами 48, а их штоки 49 подвижно фиксированы к корпусу 45 ведущей части 37 шаровыми фиксаторами 50. К основанию 46 ведущего механизма 39 неподвижно фиксирована ось поворота 51 и шестерня поворота 52 ведущего механизма рабочих частей 39, на оси 51 подвижно фиксирована вилка 53 поворота ведущего механизма рабочих частей 39. К ней неподвижно фиксированы по два статора электродвигателей поворота 54, стоящих на противоположных сторонах против друг друга, на роторах которых неподвижно фиксированы ведущие шестерни поворота 55 ведущих механизмов рабочих частей 39. К вилке 53 ведущего механизма рабочих частей 39 неподвижно фиксированы две пары статоров электродвигателей движения 56 ведущих механизмов рабочих частей 39, стоящих под углом к друг другу 100°. На их роторах неподвижно фиксированы ведущие шестерни движения 57 ведущих механизмов рабочих частей 39. К ней же неподвижно фиксирована ось движения 58, на которой подвижно фиксировано ведущее колесо 59 ведущего механизма рабочих частей 39. Между основанием 46 ведущего механизма рабочих частей 39 и вилкой 53 расположен шарикоподшипник 60. Ведомая часть 38 (фиг. 7, 8, 9, 10) состоит из рамы 61, к которой подвижно фиксированы по четыре цилиндра гидроцилиндров соединения 62-65 шаровыми фиксаторами 66, их штоки 67 подвижно фиксированы к основанию 46 ведущей части 37 шаровыми фиксаторами 68. К нижним поверхностям ведущей части 37 и ведомой части 38 подвижно во фронтальной плоскости фиксированы по два штока рабочих гидроцилиндров 69, 70 стержневыми фиксаторами 71, их цилиндры 72 подвижно фиксированы во фронтальной плоскости штифтовыми фиксаторами 73 к основанию щечек 74, к которым неподвижно фиксированы к нижним сторонам два боковых пера 75, на внутренних сторонах которых имеются пазы 76 в виде ласточкиного хвоста, в которых подвижно фиксировано среднее перо 77, к нему в верхней части неподвижно фиксирован шток гидроцилиндра 78, а его цилиндр 79 неподвижно фиксирован к основанию щечек 74.
Роботизированная система удаления зубов используется следующим образом: если необходимо движение роботизированной системы вперед или назад, то компьютерная программа включает в работу тридцать два электродвигателя движения 17, на механизмах движения стоящих на восьми парах телескопических гидроцилиндров 2-9 с каждой стороны, возможно под контролем обслуживающего персонала.
Если необходимо движение роботизированной системы для удаления зубов вправо или влево, то компьютерная программа включает в работу тридцать два электродвигателя поворота 15 на механизмах движения, которые поворачивают колеса 20 на определенную величину на восьми парах телескопических гидроцилиндров 2-9 с каждой стороны, возможно под контролем обслуживающего персонала
При движении роботизированной системы для удаления зубов по лестничному маршу или другим препятствиям происходит следующее: при возникновении препятствия перед колесами 20 первой ступени первой пары гидроцилиндров 2 компьютерная программа включает подъем всей роботизированной системы для удаления зубов на парах гидроцилиндров 3-9 с блокированной первой парой гидроцилиндров 2 и их колес 20 до уровня первой ступени с двух сторон. Затем программа включает команду движения вперед роботизированной системы для удаления зубов, и когда возникает препятствие колесам 20 второй пары гидроцилиндров 3 первой ступени, происходит подъем колес 20 второй пары гидроцилиндров 3 до уровня первой ступени. Затем происходит движение вперед, и когда возникает препятствие перед колесами 20 первой пары гидроцилиндров 2 второй ступени и третьей пары гидроцилиндров 4 их колес 20 первой ступени, происходит подъем роботизированной системы для удаления зубов на парах гидроцилиндров 3, 5, 6, 7, 8, 9 с блокировкой первой парой гидроцилиндров 2 и их колес 20 до уровня второй ступени и третьей пары гидроцилиндров 4 и их колес 20 до уровня первой ступени. Затем снова движение вперед, и когда возникает препятствие перед колесами 20 второй пары гидроцилиндров 3 второй ступени перед четвертой парой гидроцилиндров 5 и их колес 20 первой ступени, происходит подъем вверх колес 20 на парах гидроцилиндров 3 до уровня второй ступени и подъем колес 20 четвертой пары гидроцилиндров 5 до уровня первой ступени, снова движение вперед. Возникшее препятствие третьей ступени колесам 20 первой пары гидроцилиндров 2 второй ступени, колесам 20 третьей пары гидроцилиндров 4 и первой ступени колесам 20 пятой пары гидроцилиндров 6, происходит подъем роботизированной системы для удаления зубов вверх на парах гидроцилиндров 3, 5, 7, 8, 9 с блокированными парами гидроцилиндров 2 и их колес 20 до уровня третьей ступени, парами гидроцилиндров 4 и их колес 20 до уровня второй ступени, парами гидроцилиндров 6 и их колес 20 до уровня первой ступени. Продолжается движение вперед, возникает препятствие перед колесами 20 второй пары гидроцилиндров 3 третьей ступени, четвертой пары гидроцилиндров 5 и их колесам 20 второй ступени, шестой пары гидроцилиндров 7 и их колесам 20 первой ступени. Происходит поднятие колес 20 второй пары гидроцилиндров 3 и их колес 20 до уровня третьей ступени, поднятие колес 20 четвертой пары гидроцилиндров 5 до уровня второй ступени и поднятие колес 20 и шестой пары гидроцилиндров 7 до уровня первой ступени, движение вперед продолжается, когда возникает препятствие перед колесами 20 первой пары гидроцилиндров 2 четвертой ступени, колесам 20 третьей пары гидроцилиндров 4 третьей ступени, колесам 20 пятой пары гидроцилиндров 6 второй ступени и колесам 20 седьмой пары гидроцилиндров 8 первой ступени, происходит подъем роботизированной системы для удаления зубов вверх на парах гидроцилиндров 3, 5, 7, 9 с блокированными первыми парами гидроцилиндров 2 и их колес 20 до уровня четвертой ступени, с блокированными третьими парами гидроцилиндров 4 и их колес 20 до уровня третьей ступени, так же с блокированными пятыми парами гидроцилиндров 6 и их колес 20 до уровня второй ступени и блокированными седьмыми парами гидроцилиндрами 8 и их колес 20 до уровня первой ступени. Движение вперед продолжается, возникает препятствие перед второй парой гидроцилиндров 3 и их колес 20 четвертой ступени, четвертой пары гидроцилиндров 5 и их колес 20 третьей ступени, шестой пары гидроцилиндров 7 и их колес 20 второй ступени и восьмой пары гидроцилиндров 9 и их колес 20 первой ступени, происходит подъем колес 20 второй пары гидроцилиндров 3 до уровня четвертой ступени, четвертой пары гидроцилиндров 5 и их колес 20 до уровня третьей ступени, шестой пары гидроцилиндров 7 и их колес 20 до уровня второй ступени, восьмой пары гидроцилиндров 9 и их колес 20 до уровня первой ступени.
Таким образом, можно преодолеть любое препятствие на роботизированной системе для удаления зубов, как передним ходом, так и задним ходом по программе или под контролем обслуживаемого персонала. Перемещается роботизированная система для удаления зубов к больному, у которого открыта полость рта для адаптации рабочих механизмов 34, 35, 36 и полостью рта с зубами, которые необходимо по показаниям стоматолога удалить. Если необходима коррекция по высоте, то подается команда на включение в работу четырех гидроцилиндров 21, а если необходимо скорректировать угловые по ширине или по высоте, то включают в работу по отдельности четыре гидроцилиндра 21 на определенное перемещение. Если необходимо скорректировать вправо или влево, то включают в работу электродвигатели поворота 29. Если необходимо скорректировать вперед или назад, то включают в работу телескопический гидроцилиндр 32. Для удобства введения рабочих частей 34, 35, 36 с концевым штоком 33 в открытую полость рта больного, их разворачивают щеками 74 и перьями 75, 77 по продольной их оси параллельно наружной поверхности языка, для этого включают в работу электродвигатели поворота 54, которые устанавливают плоскость колеса 59 перпендикулярно продольной оси концевого штока 33, затем включают в работу электродвигатели движения 56 после введения в полоть рта рабочих механизмов 34, 35, 36 с концевым штоком 33, их ориентируют над заданными зубами, рабочий механизм 34 с щеками 74 и их перьями 75, 77 устанавливают над дистальным зубом относительно удаляемого зуба, рабочий механизм 35 с щеками 74 и с их перьями 75, 77 устанавливают над коронкой удаляемого зуба, а рабочий механизм 36 с щеками 74 и с их перьями 75, 77 устанавливают над медиальным зубом относительно удаляемого зуба, ведущую часть 37 с щеками 74 и с их перьями 75, 77 ставят со стороны преддверия полости рта над коронкой зуба, а ведомую часть 38 с щеками 74 и с их перьями 75, 77 - с язычной стороны коронки зуба. После чего отодвигают ведомую часть 38 с щеками 74 и с их перьями 75, 77 от ведущей части 37 с щеками 74 и с их перьями 75, 77 на ширину зуба, для этого включают в работу гидроцилиндры соединения 62, 63, 64, 65 и устанавливают средние оси рабочих механизмов 34, 35, 36 с щеками 74 и с их перьями 75, 77 параллельно средним продольным осям зубов, щеки 74 с перьями 75, 77 ведущих частей 37 устанавливают с преддверия полости рта поверхности коронки зубов, таким образом, чтобы концевой отдел пера 77 доходил до слизистой альвеолярного отростка, а щеки 74 с перьями 75.77 ведомых частей 38 устанавливают с язычной стороны таким образом, чтобы концевой отдел пера 77 доходил до слизистой альвеолярного отростка в области коронок зубов. Затем производят захват коронок медиальных и дистальных зубов рабочими механизмами 34, 36 щеками 74 и их перьями 75, 77, для этого включают в работу гидроцилиндры 62, 63, 64, 65 до оптимальной фиксации. После чего щеки 74 и их перья 75, 77 рабочего механизма 35 сводят до оптимального контакта коронкой и с шейкой удаляемого зуба, для этого включаем в работу гидроцилиндры 63 и 64 и опускаем щеки 74 с перьями 75.77 рабочего механизма 35 до определенного упора концевых отделов перьев 75, 77, в корневую часть удаляемого зуба, включая в работу гидроцилиндры 69 и 70 для того, чтобы препарировать круговую связку удаляемого зуба, включаем в работу по очереди гидроцилиндры 69 или 70, при этом происходит перемещение щек 74 и их концевых отделов перьев 75, 77 вперед и назад и продолжаем опускать щеки 74 с перьями 75, 77 рабочего механизма 35 до определенного упора концевых отделов щек 74 с перьями 75, 77 ведущей части 37 с язычной стороны и щек 74 с перьями 75, 77 ведомой части 38 с вестибулярной стороны, выставляем центральную продольную ось щек 74 и перьев 75, 7 параллельно продольной оси корней, включая в работу гидроцилиндры 62, 63, 64, 65. После чего до определенной величины жестко фиксируют корень и коронку удаляемого зуба, включаем в работу гидроцилиндры 62, 63, 64, 65 равномерной нагрузки. Затем приступаем к экстракции зуба, для этого включаем в работу гидроцилиндры 69, 70 рабочего механизма 35 на сближение корпуса 45 с основанием щеки 74, а гидроцилиндры 69, 70 рабочих механизмов 34 и 36 - на раздвижение корпусов 45 от основания щек 74, при этом происходит перемещение рабочих механизмов 35 относительно рабочих механизмов 34, 36, которые опираются на медиальный и дистальный зуб относительно удаляемого зуба с рабочим механизмом 35 со щеками 74 и их перьями 75, 77 с фиксированным в них зубом, если удаление зуба не произошло, то эти манипуляции необходимо повторить до полного удаления зуба. После чего проводят обратные манипуляции для снятия рабочих механизмов 34, 36 с коронок медиальных и дистальных зубов. При удалении резцов, клыков, малых коренных зубов и корней необходимо произвести настройку рабочего механизма 35 и его пера 77, для чего необходимо включить в работу гидроцилиндр 78, при этом происходит выдвижение подвижного пера 77 относительно боковых перьев 75 по пазам 76, остальные манипуляции повторяют по тому же сценарию.
Роботизированная система удаления зубов, содержащая основание, пульт дистанционного управления, электрические приводы, гидравлические системы, отличающаяся тем, что роботизированная система выполнена в виде основания, к которому неподвижно крепятся по восемь пар с каждой стороны цилиндры телескопических гидроцилиндров, к концевым штокам неподвижно крепятся кожухи движущих механизмов, к которым неподвижно крепятся шестерни поворота, к ним же неподвижно крепятся оси поворота, на которых подвижно крепятся вилки поворота, на которых неподвижно с двух противоположных сторон стоящие друг против друга крепятся статоры электродвигателей поворота, к их роторам неподвижно крепятся ведущие шестерни поворота, к вилкам поворота неподвижно крепятся с двух противоположных сторон стоящие друг против друга статоры электродвигателей движения, а к их роторам неподвижно крепятся ведущие шестерни движения, к вилкам поворота неподвижно крепятся оси колес движения, на которых подвижно крепятся колеса движения, к основанию подвижно крепятся четыре гидравлических штока гидроцилиндров шаровыми фиксаторами, их цилиндры фиксированы подвижно к корпусу шаровыми фиксаторами, к корпусу неподвижно фиксирована ось поворота, на которой подвижно фиксирована шестерня поворота, которая неподвижно фиксирована к головному концу, к корпусу неподвижно с двух противоположных сторон стоящие друг против друга фиксированы статоры электродвигателей поворота головного конца, на роторах которых неподвижно фиксированы ведущие шестерни поворота головного конца, к головному концу 28 неподвижно фиксирован цилиндр телескопического гидроцилиндра, на концевом штоке подвижно фиксированы три рабочих механизма, которые состоят из ведущих частей и ведомых частей, ведущие части подвижно фиксированы на концевом штоке при помощи двух движущих механизмов рабочих частей, стоящих на противоположных сторонах друг против друга, и по две пары с каждой противоположной стороны стоящих против друг друга относительно продольной оси конечного штока шарикоподшипников, которые состоят из шариков, обойм с направляющими, обойма неподвижно фиксирована к штокам гидроцилиндров, а их цилиндры неподвижно фиксированы к корпусу ведущей части, к основаниям ведущих механизмов рабочих частей подвижно фиксированы четыре цилиндра гидроцилиндров шаровыми фиксаторами, а их штоки подвижно фиксированы к корпусу ведущей части шаровыми фиксаторами, к основанию ведущего механизма неподвижно фиксирована ось поворота и шестерня поворота ведущего механизма рабочих частей, на оси подвижно фиксирована вилка поворота ведущего механизма рабочих частей, к ней неподвижно фиксированы по два статора электродвигателей поворота, стоящих на противоположных сторонах против друг друга, на роторах которых неподвижно фиксированы ведущие шестерни поворота ведущих механизмов рабочих частей, к вилке ведущего механизма рабочих частей неподвижно фиксированы две пары статоров электродвигателей движения ведущих механизмов рабочих частей, стоящих под углом к друг другу 100°, на их роторах неподвижно фиксированы ведущие шестерни движения ведущих механизмов рабочих частей, к ней же неподвижно фиксирована ось движения, на которой подвижно фиксировано ведущее колесо ведущего механизма рабочих частей, между основанием ведущего механизма рабочих частей и вилкой расположен шарикоподшипник, ведомая часть состоит из рамы, к которой подвижно фиксированы четыре цилиндра гидроцилиндров соединения шаровыми фиксаторами, их штоки подвижно фиксированы к основанию ведущей части шаровыми фиксаторами, к нижним поверхностям ведущей части и ведомой части, подвижно, во фронтальной плоскости фиксированы по два штока рабочих гидроцилиндров стержневыми фиксаторами, их цилиндры подвижно фиксированы во фронтальной плоскости штифтовыми фиксаторами к основанию щечек, к нижним сторонам которых неподвижно фиксированы два боковых пера, на внутренних их сторонах имеются пазы в виде ласточкиного хвоста, в которых подвижно фиксировано среднее перо, к нему в верхней части неподвижно фиксирован шток гидроцилиндра, а его цилиндр неподвижно фиксирован к основанию щечек.
Окончательная остановка носового кровотечения при травме решетчатого лабиринта с использованием эндоскопической техники и инструмента
Универсальная инвалидная коляска с автоматизированной электрогидравлической системой
Малотравматичная методика наружной фиксации отломков при переломе передней стенки лобной пазухи
Оптимальная методика контурной пластики при деформации средней зоны лица
Малотравматичная методика остеотомии верхней челюсти
Способ фиксации наружного носа и перегородки полости носа.
Универсальная инвалидная коляска с автоматизированной электрогидравлической системой
Малотравматичная методика наружной фиксации отломков при переломе передней стенки лобной пазухи
Оптимальная методика контурной пластики при деформации средней зоны лица
Малотравматичная методика остеотомии верхней челюсти
Способ фиксации наружного носа и перегородки полости носа.

