Результат интеллектуальной деятельности: СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННЫХ ОТРАЖЕНИЙ
Вид РИД
Изобретение
Настоящее изобретение относится к области радиолокации, в частности к области испытания бортовых радиолокационных станций (РЛС) в лабораторных условиях.
На различных этапах разработки РЛС в настоящее время широко используется полунатурное моделирование. При этом в лабораторных условиях с помощью специальных устройств - имитаторов - создается радиолокационная обстановка (совокупность эхосигналов и помех), соответствующая работе станции в реальных условиях работы. Подобный подход позволяет существенно сокращать сроки и стоимость разработки РЛС.
Наиболее полным является моделирование, при котором воспроизводятся электромагнитные поля на апертуре приемной антенны. Перспективным решением этой задачи является использование матричных имитаторов - устройств, основанных на геометрических моделях объектов. Они представляют собой систему неподвижных излучателей, закрепленных в дальней зоне антенны исследуемого устройства.
В литературе описаны способы имитации радиолокационных отражений, при которых при помощи двух излучателей изменяют положение кажущегося центра излучения, который характеризует направление, с которого поступает электромагнитная волна. Двухточечные модели, а также результаты их исследований рассмотрены в работах: Статистическая теория радиолокации протяженных целей. / Р.В. Островитянов, Ф.А. Басалов. - М.: Радио и связь, 1982. - 232 с.; Рассеяние радиоволн на телах сложной формы. / Штагер Е.А. - М.: Радио и связь, 1986. - 184 с. и др.
На основе этой двухточечной модели построены такие устройства, как: US патент №20090058715 «Methods and systems for generating virtual radar targets», 2009; US патент №6950057 «Complex radar target simulator», 2005; US патент №4467327 «Active millimeter wave simulator for missile seeker evaluations», 1984; US патент №5457463 «Radar return signal simulator», 1995; US патент №4660041 «Radar scene simulator», 1987, РФ патент №2386143, 2009 и ряд других.
Все эти устройства моделируют на апертуре приемной антенны исследуемой РЛС электромагнитные поля, соответствующие отражениям от точечной радиолокационной цели. Они представляют собой формирователь радиолокационных эхосигналов и излучающую часть, состоящую из совокупности неподвижных антенн. В устройствах используется один из двух принципов перемещения цели по угловым координатам.
Первый принцип заключается в коммутации излучающих антенн. Имитатор содержит совокупность неподвижных антенн. В каждый момент времени эхосигнал (в дальнейшем, наряду с термином эхосигнал будет использоваться эквивалентное ему понятие сигнал) от точечной цели излучают лишь одной антенной, угловое положение которой соответствует угловому положению моделируемой точечной цели. К недостаткам этого способа можно отнести дискретность изменения углового положения цели. Для обеспечения малого шага переключения углового положения требуется большое количество антенн и сложный коммутатор СВЧ сигналов.
Второй способ основан на использовании двухточечной геометрической модели, широко известной и применяемой в радиолокации. В этом случае сигнал излучается одновременно двумя антеннами - точками двухточечной модели. В точке наблюдения присутствует суммарный сигнал. РЛС измеряет его параметры и оценивает угловые положения так называемого кажущегося центра излучения (КЦИ). Угловое положение КЦИ зависит от отношения уровней сигналов, подводимых к этим излучателям, и их разности фаз. С использованием этого способа возможно моделировать точечные объекты с изменяющимися угловыми координатами. Для моделирования отражений от распределенных объектов, так же как и в предыдущем случае, необходимо значительно увеличивать количество излучающих точек (в идеале, количество излучателей должно соответствовать количеству отражающих точек реального моделируемого распределенного объекта и может составлять тысячи штук).
В силу статистической связи между излучаемыми сигналами, а также ограниченного количества излучателей, их общим недостатком является неспособность имитировать отражения от распределенных радиолокационных объектов.
Прототипом предлагаемого изобретения является способ имитации радиолокационных отражений, на основе которого функционирует устройство, описанное в «Имитатор радиолокационного сценария», описанное в US патент №4660041 «RADAR SCENE SIMULATOR», 1983. Устройство представляет собой совокупность антенн, отражающих в направлении исследуемой РЛС сигналы, соответствующие отражениям от радиолокационных целей. Его принцип работы следующий. От блока формирования сигналов к каждой антенне имитатора подводят управляющие сигналы, которые определяют излучение, соответствующее заданному радиолокационному сценарию. В каждом из излучателей производят смешивание управляющего сигнала и зондирующего сигнала, излученного РЛС в направлении имитатора. По сути, производят наложение допплеровских флуктуаций, соответствующих имитируемой цели (или, как его называют авторы, сигнала управления), на зондирующий сигнал РЛС. Далее сигнал с наложенными допплеровскими флуктуациями излучают антенной, соответствующей угловому положению имитируемого объекта.
Однако описанному способу присущи следующие недостатки. Во-первых, для его реализации необходимо излучение зондирующего сигнала РЛС, что бывает не всегда возможно. Во-вторых, с использованием подобного способа могут быть сформированы отражения лишь от точечных объектов. Задачи формирования отражений от поверхностно-распределенных объектов с большим количеством отражающих точек подобный способ решать не способен. Происходит это в силу следующих факторов. Для точечных объектов КЦИ представляет собой точку с угловыми координатами, соответствующими угловым координатам моделируемого объекта. В случае если моделируемый объект является распределенным, т.е. состоящим из множества отражателей, положение КЦИ флуктуирует. Среднее значение, относительно которого флуктуирует КЦИ (mγ), определяет угловое положение объекта, величина флуктуаций (μ) - его угловой размер. Это явление получило название шумов координат. При построении имитаторов электромагнитных полей с когерентно связанными сигналами, подводимых к излучателям, необходимо обеспечить количество излучающих антенн, равное количеству отражающих точек моделируемого объекта. Это приводит к тому, что имитатор, использующий описанный способ, становится физически не реализуемым.
Задачей (техническим результатом) предлагаемого способа является разработка способа, при котором возможно формирование радиолокационных отражений от поверхностно распределенных объектов на основе малоточечной геометрической модели, не требующей излучения зондирующего сигнала РЛС.
Поставленная задача достигается тем, что в способе имитации радиолокационных отражений, при котором осуществляют наложение допплеровских флуктуаций, соответствующих отражениям от распределенного объекта на зондирующий сигнал РЛС, переносят сформированные сигналы на рабочую частоту и подводят к излучающим антеннам. Рассчитывают три статистически не зависимые реализации эхосигнала от замещаемого объекта, для всех элементов разрешения по дальности устанавливают заданные уровни мощности каждой из рассчитанных реализаций эхосигналов, из совокупности антенн определяют номера трех излучающих антенн, к которым и подводят рассчитанные реализации эхосигналов.
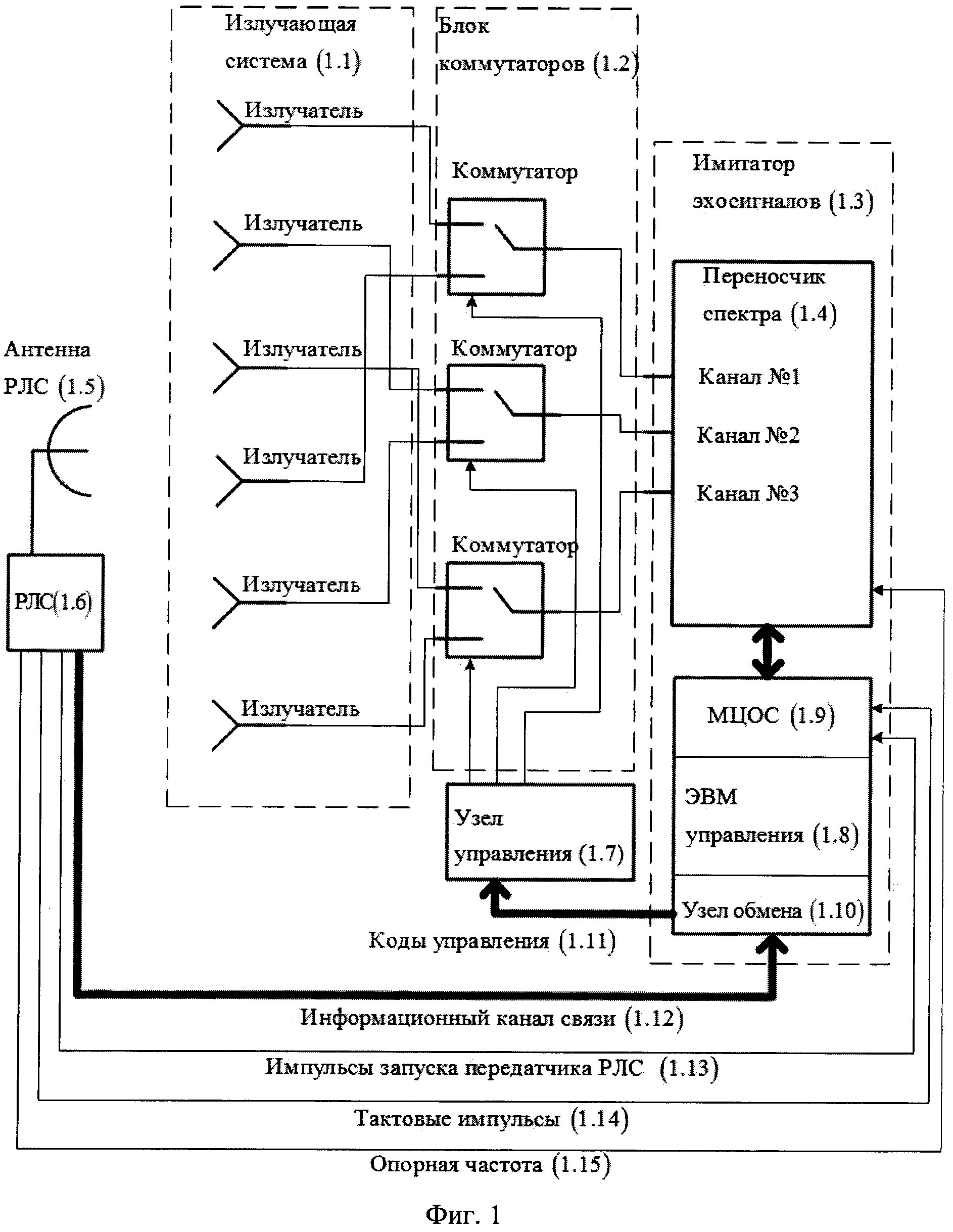
На фиг. 1. изображена структура некогерентного матричного имитатора на основе трехточечной геометрической модели с неэквидистантным расположением облучателей. На фиг. 2. изображены границы области, в пределах которой возможно независимое управление параметрами шумов координат для шеститочечной геометрической модели с эквидистантным расположением излучателей.
Устройство, реализующее предложенный способ, изображено на фиг. 1 и содержит:
Излучающую систему матричного имитатора (1.1), представляющую собой вертикально расположенную линейку из шести слабо направленных антенн;
Блок коммутаторов (1.2), представляющий собой набор из трех коммутаторов, каждый из которых осуществляет переключение входного сигнала на один из излучателей;
Имитатор эхосигналов (1.3), состоящий из переносчика спектра и ЭВМ управления;
Переносчик спектра (1.4), осуществляющий перенос спектра сигнала из низкочастотной области на рабочую частоту РЛС;
Антенну РЛС (1.5), осуществляющую прием электромагнитных волн, сформированных излучающей системой матричного имитатора;
РЛС (1.6), осуществляющую обработку принятых сигналов;
Узел управления (1.7), вырабатывающий, под действием команд управления, сигналы управления для блока коммутаторов;
ЭВМ управления (1.8), осуществляющую расчет отсчетов комплексных огибающих эхосигналов от моделируемого объекта и формирование команд управления коммутаторами;
Модуль цифровой обработки сигналов (1.9), входящий в состав ЭВМ и осуществляющий формирование радиочастотных сигналов на основе рассчитанных ЭВМ отсчетов комплексной огибающей;
Узел обмена (1.10), осуществляющий сопряжение ЭВМ и РЛС по информационным каналам обмена;
Канал передачи кодов управления (1.11), по которому передаются коды управления коммутаторами;
Информационный канал связи (1.12), по которому в имитатор передается информация о режиме работы РЛС;
Канал передачи импульсов запуска передатчика (1.13), тактовых импульсов (1.14) и опорной частоты (1.15), по которым передаются сигналы временной и частотной синхронизации РЛС и имитатора.
Заявляемое техническое решение базируются на трехточечной геометрической модели с неэквидистантным расположением излучателей.
Матричный имитатор состоит из трех основных узлов:
имитатор эхосигналов (1.3), состоящий в свою очередь из переносчика спектра (1.4) и ЭВМ управления (1.9);
блок коммутаторов (1.2) с узлом управления (1.7);
излучающая система (1.1).
Способ реализуется следующим образом. От РЛС в имитатор эхосигналов через узел обмена поступает информация о текущем режиме работы, а также сигналы временной и частотной синхронизации: импульсы запуска передатчика (ИЗП) и тактовые импульсы (ТИ), опорная частота. По каждому ИЗП в ЭВМ управления с учетом информации о режиме работы РЛС, принятой по информационному каналу связи, осуществляют расчет:
1. Параметров эхосигналов от распределенного объекта с учетом направления визирования диаграммы направленности РЛС и ее ширины, параметров зондирующего сигнала, геометрии расположения РЛС и моделируемого объекта;
2. Отсчетов комплексных огибающих трех сигналов, соответствующих отражениям от распределенного объекта для всех элементов разрешения по дальности;
3. Уровней этих сигналов для обеспечения в каждом элементе дальности параметров шумов координат, соответствующих моделируемому объекту;
4. Номеров активных излучателей исходя из углового положения и углового размера моделируемого фрагмента распределенного объекта.
Каждый из трех рассчитанных сигналов представляет собой случайный процесс с нормальным распределением мгновенных значений и спектром, соответствующим допплеровскому спектру отражений от фрагмента распределенного объекта в пределах элемента разрешения РЛС. По сути, это три статистически не зависимых реализации эхосигнала от имитируемого объекта в целом.
В пределах элемента разрешения по дальности мощность каждого из трех сигналов определяется угловым положением и угловыми размерами фрагмента радиолокационного объекта.
Таким образом, результатом расчета являются три массива отсчетов комплексной огибающей сигнала, представляющих собой статистически не зависимые реализации эхосигналов от распределенного объекта, сформированных с учетом возможности моделирования шумов координат распределенного объекта.
Эти массивы отсчетов комплексной огибающей загружаются в модуль цифровой обработки сигналов (МЦОС). С помощью МЦОС из массивов отсчетов комплексной огибающей производят формирование трех радиочастотных сигналов на промежуточной частоте. Сигналы, сформированные МЦОС, поступают на трехканальный аналоговый переносчик спектра, осуществляющий перенос спектра сигнала в диапазон рабочих частот РЛС.
К выходам переносчика спектра через блок коммутаторов подключена излучающая система. Блок коммутаторов представляет собой набор из трех коммутаторов. Каждый коммутатор переключает СВЧ сигнал со входа на один из двух выходов. Переключение коммутаторов осуществляют с помощью узла управления. Команды узлу управления вырабатывает ЭВМ управления исходя из возможностей трехточечной некогерентной модели по замещению радиолокационного объекта.
Излучающая система представляет собой линейку из шести слабонаправленных антенн. Максимум диаграммы направленности каждой из антенн направлен в сторону приемной антенны исследуемой РЛС. Поляризация антенн совпадает с поляризацией антенны исследуемой РЛС. Каждая из антенн подключается к одному из выходов блока коммутаторов. Единовременно активными, т.е. излучающими, может быть не более трех антенн. Эти три антенны, по сути, являются точками малоточечной геометрической модели с неэквидистантным расположением излучателей.
Способ, позволяющий формировать отражения от распределенных объектов с использованием описанного матричного имитатора, базируется на основе малоточечной геометрической модели.
Предложено перейти от статистически связанных сигналов, поступающих на излучатели сигналов, к сигналам, представляющим собой статистически не зависимые реализации случайного процесса с нормальным распределением мгновенных значений и заданными спектрально-корреляционными свойствами. Подобные сигналы характерны для отражений от земной поверхности, являющейся распределенным объектом.
При использовании двухточечной геометрической модели со статистически не зависимыми излучаемыми сигналами параметры шумов координат mγ (угловое положение моделируемого объекта) и μ (величина, обратная угловому размеру объекта) оказываются связанными соотношением:
где Δγ - расстояние между излучателями геометрической модели.
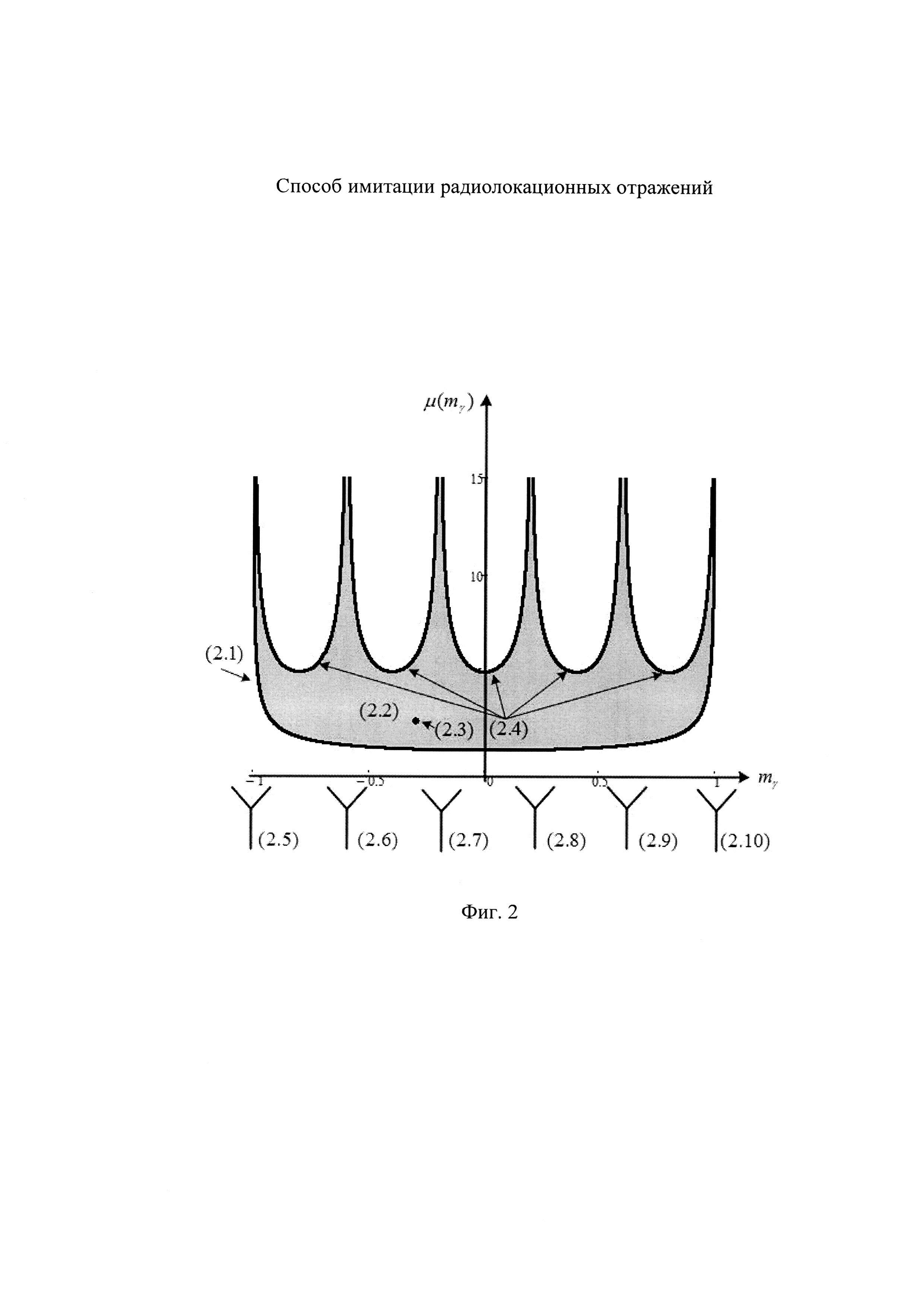
Зависимости μ(mγ) изображены на фиг. 2 (кривые (2.1) и (2.4)). Кривая (2.1) изображает зависимость μ(mγ) для двухточечной модели на основе излучающих точек (2.5) и (2.10). Кривая (2.4) представляет собой совокупность зависимостей μ(mγ) для двухточечных моделей, на основе пар смежных излучателей (например (2.5) и (2.6); (2.6) и (2.7) и т.д.). Из рисунка видно, что угловое положение моделируемого объекта может располагаться между излучателями двухточечной модели. Сближение излучателей геометрической модели приводит к сужению возможных угловых положений моделируемого объекта и вместе с тем к возрастанию параметра μ, т.е. к уменьшению их угловых размеров.
Очевидно, что подобная связь углового положения и углового размера моделируемого объекта является существенным ограничением подобной модели. В связи с этим было рассмотрено влияние количества излучающих точек геометрической модели на возможности независимого управления параметрами распределения шумов координат.
Установлено, что увеличение количества точек приводит к возможности независимого управления параметрами распределения шумов координат в ограниченном диапазоне. По мере роста количества излучающих точек диапазон независимого управления mγ и μ расширяется. Получены соотношения для произвольного количества эквидистантно расположенных излучающих точек, определяющие взаимосвязь параметров сигналов, подводимых к излучателям, и параметров плотности распределения вероятности шумов координат. Установлено, что диапазон независимого управления параметрами плотности распределения вероятности шумов координат представляет собой область, ограниченную зависимостью μ(mγ) для двухточечной модели на основе двух крайних излучателей и совокупностью зависимостей μ(mγ) для двухточечных моделей, основанных двумя смежными излучателями. На фиг. 2 область независимого управления mγ и μ обозначена (2.2).
На основе этих соотношений показано, что для обеспечения возможности независимого управления параметрами распределения шумов координат в диапазоне, соответствующем N-точечной модели, достаточно использовать лишь 3 из N излучателей, выбирая их по определенному алгоритму в зависимости от требуемых угловых размеров и положения моделируемого объекта. Остальные N-3 излучающие точки остаются не активными. При этом образуется трехточечная геометрическая модель с не эквидистантно расположенными излучающими точками. Для этой модели были получены выражения, позволяющие определить границы диапазона, в котором возможно независимое управление угловым положением и угловым размером моделируемого объекта:
 ;
;
 ;
;
 ,
,
где γ1, γ2 и γ3 - координаты излучающих точек неэквидистантной трехточечной модели.
В зависимости от выбранной тройки активных излучателей диапазон, в котором возможно независимое управление параметрами μ и mγ изменяется, находясь при этом в пределах диапазона независимого управления для N точечной геометрической модели.
Таким образом достигается заявленный технический результат.
Способ имитации радиолокационных отражений, при котором осуществляют наложение допплеровских флуктуаций, соответствующих отражениям от распределенного объекта на зондирующий сигнал РЛС, переносят сформированные сигналы на рабочую частоту и подводят к излучающим антеннам, отличающийся тем что рассчитывают три статистически не зависимые реализации эхосигнала от замещаемого объекта, для всех элементов разрешения по дальности устанавливают заданные уровни мощности каждой из рассчитанных реализаций сигналов, из совокупности антенн, расположенных неэквидистантно, определяют номера трех излучающих антенн, к которым подводят рассчитанные реализации сигналов, при этом номера трех излучающих антенн определяют исходя из определения границ изменения диапазона, в котором возможно независимое управление угловым положением и угловым размером моделируемого объекта.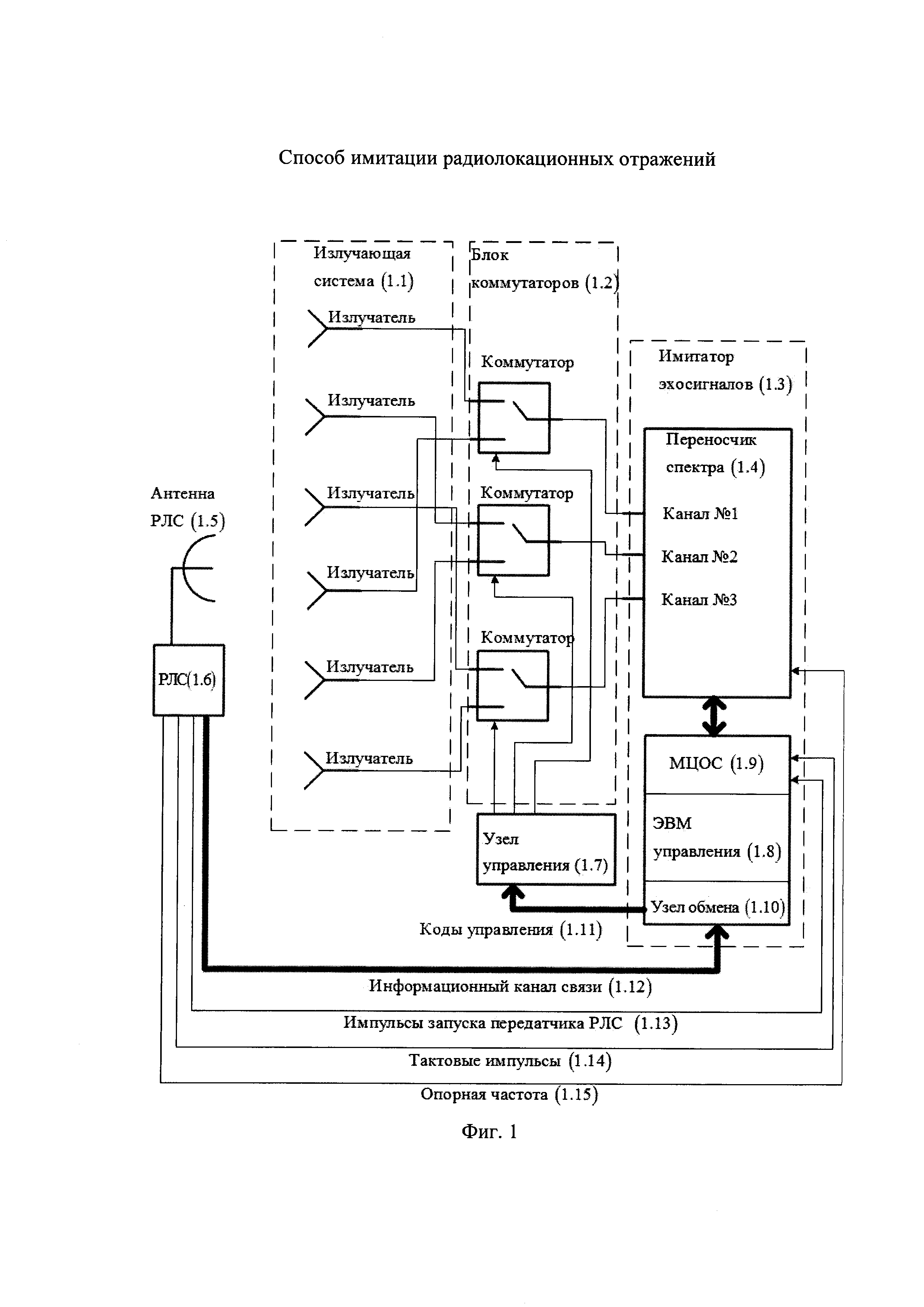
Способ определения собственных частот и форм колебаний свободной конструкции по результатам испытаний этой конструкции с наложенными связями
Способ картографирования с помощью кольцевой антенной решётки
Ветроэнергетическая установка
Способ дегозации нефтесодержащих вод
Способ и система определения относительного положения летательных аппаратов
Волоконный лазер для генерации высокоэнергетических световых импульсов
Способ определения поверхности диэлектрической бифокальной линзовой антенны

