Результат интеллектуальной деятельности: СПОСОБ РЕГИСТРАЦИИ ПРОХОЖДЕНИЯ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА ПО УЧАСТКУ ПУТИ
Вид РИД
Изобретение
Изобретение относится к управлению движением поездов, а именно к путевым устройствам, взаимодействующим с поездом, посредством которых определяют факт прохода колеса по участку пути, диаметр колеса, направление движения и скорость подвижного состава.
Известно устройство для регистрации прохождения колесных пар подвижного состава, выполненное с возможностью подачи необходимого питания на требующие питания элементы, содержащее первый генератор, вход которого является первым входом ДСО, а выход подключен к первому амплитудному детектору, второй генератор, вход которого является вторым входом ДСО, а выход подключен к второму амплитудному детектору, третий генератор, вход которого является третьим входом ДСО, а выход подключен к третьему амплитудному детектору, причем выходы первого второго и третьего амплитудных детекторов подключены соответственно к первому, второму и третьему входам устройства преобразования и управления (УПУ), первый выход которого соединен с первым выходом ДСО через последовательно соединенные первую гальваническую развязку (ГР) и первый трансивер (TP), второй выход УПУ соединен с вторым выходом ДСО через последовательно соединенные вторую ГР и второй TP, третий выход УПУ соединен с третьим выходом ДСО через последовательно соединенные третью ГР и третий TP, а дополнительный выход каждого из трансиверов соединен соответственно с четвертым, пятым, шестым входом УПУ через соответственно четвертую, пятую, шестую ГР, а информационный порт (ИП) УПУ подключен к ИП ДСО через последовательно соединенные седьмую ГР и трансивер шины CAN (патент на полезную модель RU 125951 «Датчик считывания осей (ДСО), устройство считывания осей», дата приоритета 19.06.2012 г.).
Недостатками данного технического решения являются большое количество оборудования, использование для проверки фиксации датчика на рельсе третьей катушки и соответствующей схемы, необходимость большого количества проводов для передачи данных на пост, что определяет недостаточную надежность работы датчика.
Наиболее близким решением, взятым за прототип, является способ регистрации прохождения колесных пар подвижного состава по участку пути, включающий в себя использование в составе датчика регистрации прохода колеса, по меньшей мере, одного контроллера и, по меньшей мере, двух индуктивных датчиков, расположенных на некотором расстоянии друг от друга вдоль рельса, измерение напряжений на выходе рельсовых индуктивных датчиков, при отсутствии и проследовании над ними колеса, определение момента максимального отклонения напряжения на выходе первого по ходу движения датчика относительно значения, когда колесо отсутствовало, и сравнение в этот момент значений выходных напряжений на выходе остальных индуктивных датчиков с некоторыми пороговыми диапазонами напряжений, в результате чего устанавливается факт проследования колеса по участку пути, диаметр колеса, его направление движения и скорость (патент на изобретение «Способ регистрации прохождения колесных пар подвижного состава и устройство для его осуществления» RU 2564553, дата приоритета 17.12.2013 г.).
При проходе реборды над поверхностью датчика регистрации прохода колеса амплитуда отклонений напряжения на выходе индуктивных датчиков существенно (более чем в 10 раз) меняется в зависимости от расстояния от реборды колеса до боковой поверхности головки рельса (и, соответственно, до продольной оси симметрии датчика прохода колеса) и от расстояния от реборды колеса до поверхности индуктивных датчиков. Это приводит к ошибкам регистрации прохождения именно колеса подвижного состава над датчиком регистрации прохода колеса и ошибкам в определении диаметра колеса способом, описанным в прототипе. Этим же недостатком обладают и другие известные решения для регистрации прохода колеса по участку пути (например, заявка DE 20041041803 дата приоритета 24.08.2004, патент RU 2323120, дата приоритета 11.08.2006 и др.). В реальных условиях эксплуатации гребень реборды колеса может отклоняться от боковой поверхности головки рельса на расстояния до 67 мм. А расстояние от реборды колеса до поверхности датчика регистрации прохода колеса может меняться от 6 до 20 мм.
Техническим результатом, на который направлено предлагаемое изобретение, является расширение функциональных возможностей способа, повышение надежности регистрации прохода именно колеса подвижного состава и повышение точности определения его диаметра.
Технический результат достигается тем, что в способе регистрации прохождения колесных пар подвижного состава по участку пути, включающем в себя использование в составе датчика регистрации прохода колеса, по меньшей мере, одного контроллера и, по меньшей мере, двух индуктивных датчиков, расположенных на некотором расстоянии друг от друга вдоль рельса, измерение напряжений на выходе индуктивных датчиков при отсутствии и проследовании над ними колеса, где в результате обработки отклонений напряжений устанавливают факт проследования колеса по участку пути, диаметр колеса, его направление движения и скорость, согласно изобретению в память контроллера датчика регистрации прохода колеса предварительно заносят информацию об изменении напряжений на выходе индуктивных датчиков 1, 2…n в виде некоторого k наборов функции U1=F1(l), U2=F2(l), … Un=Fn(l) при имитации прохода конкретных реборд колеса на некоторых фиксированных расстояниях от поверхности датчика регистрации прохода колеса и от боковой поверхности головки рельса, включая моделирование максимальной степени износа реборды и поверхности катания колеса и рельса, где l - расстояние от колеса до некоторой опорной точки на рельсе по ходу движения колеса, а k - число имитируемых проходов и, соответственно, количество наборов функций U1=F1(l), U2=F2(l), … Un=Fn(l), во время работы датчика регистрации прохода колеса при проходе реборды над его поверхностью фактические данные об изменении напряжений на выходе индуктивных датчиков u1=f1(t), u2=f2(t)… fn(t) в реальном масштабе времени заносят в память контроллера, затем эти функции, с учетом вычисленной скорости прохода колеса, преобразуют в функции u1=f1(l), u2=f2(l), … un=fn(l), сравнивают их с наборами функций U1=F1(l), U2=F2(l), … Un=Fn(l), хранимых в памяти контроллера, при совпадении с определенной степенью точности с одним из наборов функций, хранимых в памяти контроллера, устанавливают факт прохождения над индуктивными датчиками именно реборды колеса соответствующего диаметра, а при несовпадении - реконструируют функции напряжений u1=f1(l), u2=f2(l), … un=fn(l) с учетом максимального отклонения значения напряжения одной или нескольких функций U1=F1(l), U2=F2(l), … Un=Fn(l), а затем по полученным функциям устанавливают факт прохождения над индуктивными датчиками именно реборды колеса и его диаметр.
Функции u1=f1(l), u2=f2(l), … un=fn(l) реконструируют относительно функций U1=F1(l), U2=F2(l),… Un=Fn(l), путем умножения всех значений функций u1=f1(l), u2=f2(l), … un=fn(l) на некоторый коэффициент  , где Uмакс - максимальное значение отклонения напряжения из всех наборов функций U1=F1(l), U2=F2(l) … Un=Fn(l), хранимых в памяти процессора, а uмакс - максимальное отклонение значения напряжения одной из функций, зарегистрированных во время работы датчика при проходе колеса и преобразованных в функции u1=f1(l), u2=f2(l) … un=fn(l).
, где Uмакс - максимальное значение отклонения напряжения из всех наборов функций U1=F1(l), U2=F2(l) … Un=Fn(l), хранимых в памяти процессора, а uмакс - максимальное отклонение значения напряжения одной из функций, зарегистрированных во время работы датчика при проходе колеса и преобразованных в функции u1=f1(l), u2=f2(l) … un=fn(l).
Также коэффициент К можно определять с учетом ранее имитируемых проходов колеса с неизношенной ребордой и неизношенной поверхностью катания колеса (что соответствует максимально возможному удалению реборды от поверхности датчика регистрации прохода колеса) и при проходе колеса с максимально изношенной ребордой и максимально изношенной поверхностью катания колеса (что соответствует минимально возможному удалению реборды колеса от поверхности датчика регистрации прохода колеса), а именно
 ,
,
где U''макс - максимальное отклонение значения напряжения из наборов функций U'1=F'1(l), U'2=F'2(l) … U'n=F'n(l), соответствующих имитируемым проходам колеса с максимальным удалением реборды от поверхности датчика регистрации прохода колеса, а и  - максимальное отклонение значения напряжения из наборов функций
- максимальное отклонение значения напряжения из наборов функций  =
= ,
,  =
= , …
, …  =
= , соответствующих имитируемым проходам колеса с минимальным удалением реборды от поверхности датчика регистрации прохода колеса, uмакс - максимальное отклонение значения напряжения одной из функций, зарегистрированных во время работы датчика при проходе колеса и преобразованных в функции u1=f1(l), u2=f2(l) … un=fn(l).
, соответствующих имитируемым проходам колеса с минимальным удалением реборды от поверхности датчика регистрации прохода колеса, uмакс - максимальное отклонение значения напряжения одной из функций, зарегистрированных во время работы датчика при проходе колеса и преобразованных в функции u1=f1(l), u2=f2(l) … un=fn(l).
Или же фактически полученные данные на выходе индуктивных датчиков, преобразованные в функции u1=f1(l), u2=f2(l), … un=fn(l), нормируют относительно некоторого усредненного номинального значения Nмакс путем умножения всех значений функций u1=f1(l), u2=f2(l) … un=fn(l) на коэффициент  , где uмакс - максимальное отклонение значения напряжения одной из функций u1=f1(l), u2=f2(l), … un=fn(l).
, где uмакс - максимальное отклонение значения напряжения одной из функций u1=f1(l), u2=f2(l), … un=fn(l).
Фактически полученные на выходе индуктивных датчиков данные u1=f1(l), u2=f2(l), … fn(l) до преобразования в функции u1=f1(l), u2=f2(l), … un=fn(l) могут быть сглажены и очищены от помех методами математической обработки сигнала.
Значения Uмакс,  ,
,  и Nмакс можно предварительно определять и заносить в память контроллера.
и Nмакс можно предварительно определять и заносить в память контроллера.
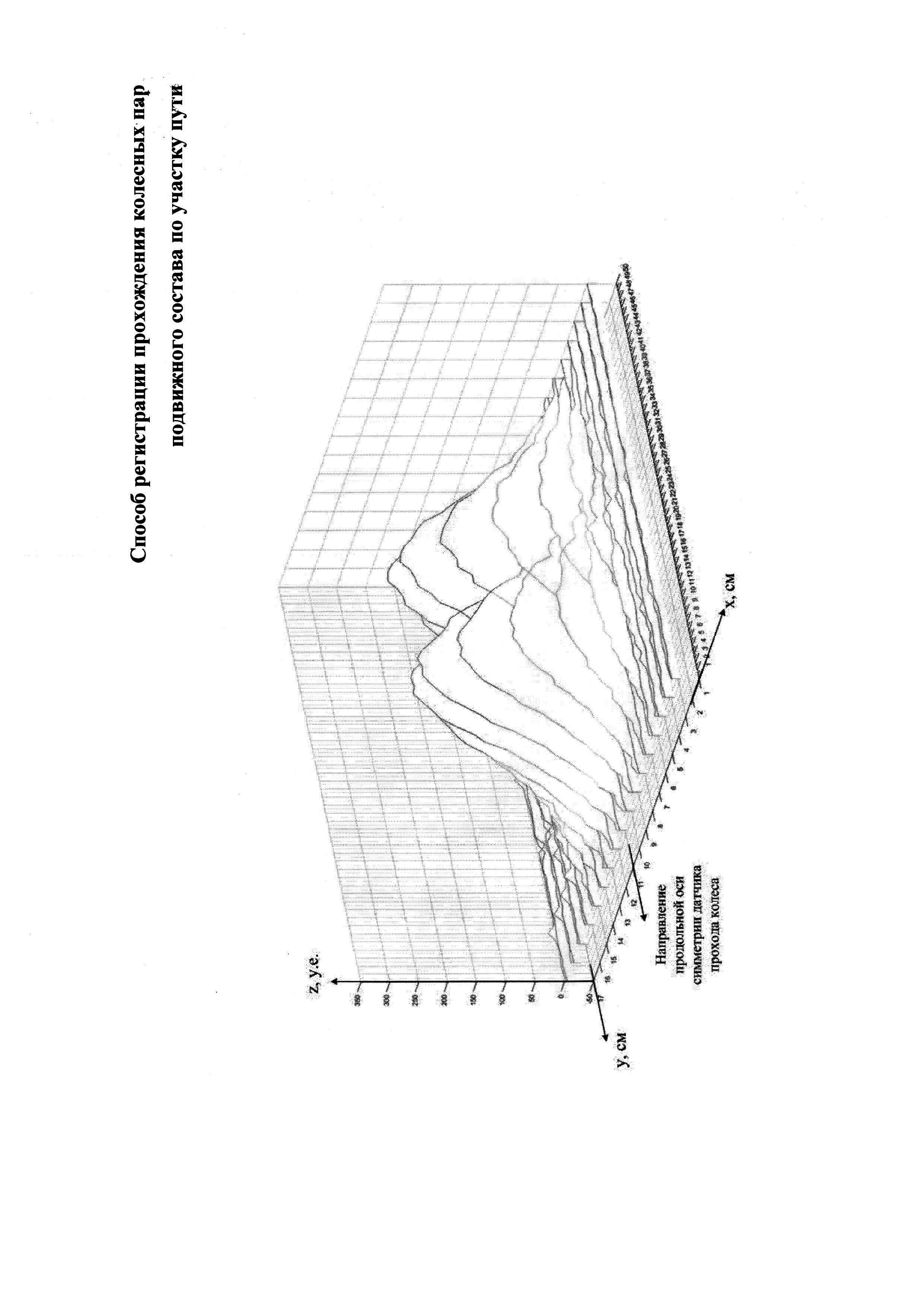
Сущность заявляемого изобретения поясняется диаграммами, приведенными на чертеже.
На чертеже в аксонометрическом виде приведены примеры изменения напряжений на выходе первого и второго индуктивных датчиков датчика регистрации прохода колеса по мере продвижения над ними реборды колеса. Стрелкой обозначено направление продольной оси симметрии датчика регистрации прохода колеса (непосредственно над его поверхностью), вдоль которой на некотором расстоянии друг от друга расположены два индуктивных датчика. По оси Y (в см) показано перемещение реборды колеса вдоль продольной оси симметрии датчика непосредственно над его поверхностью. По оси X с шагом 1 см относительно продольной оси симметрии датчика регистрации прохода колеса показаны варианты изменения напряжений (диаграммы) на выходе первого и второго индуктивных датчиков для каждого из конкретных предварительно имитируемых вариантов прохода колеса в зависимости от расстояния, на котором реборда колеса проходит от продольной оси симметрии датчика прохода колеса. По оси Z - в относительных условных единицах показано отклонение напряжений на выходе первого и второго индуктивных датчиков от некоторого своего первоначального значения (соответственно первые и вторые колоколообразные кривые на приведенных диаграммах) при прохождении конкретной реборды колеса.
В известных способах (заявка DE 20041041803 от 24.08.2004, патенты RU 2323120 от 11.08.2006, RU 2564553 от 17.12.2013 и др.) факт проследования над индуктивными датчиками 1 и 2 именно колеса и диаметр колеса определяют по одному фактическому проходу колеса. При этом требуется некоторое перекрытие во времени и пространстве состояний одновременной регистрации колеса как датчиком 1, так и датчиком 2. Это накладывает существенные ограничения на их использование.
Если расстояние между датчиками 1 и 2 будет больше некоторой критической величины или диаметр колеса будет меньше определенной величины, перекрытия одновременной регистрации колеса датчиками 1 и 2 вообще не произойдет. И, следовательно, колесо регистрироваться не будет. Если расстояние между датчиками 1 и 2 будет менее некоторой критической величины, время прохода колесом этого расстояния на допустимых скоростях поезда становится настолько незначительным, что его недостаточно для выполнения применяемых алгоритмов обработки сигнала. И, следовательно, возникают ограничения по скорости и/или диаметру колеса, при которых каждый из известных способов регистрации прохождения колесных пар подвижного состава по участку пути может применяться. Кроме того, при использовании известных способов, чем больше боковое отклонение реборды колеса от продольной оси симметрии при проходе над датчиками 1 и 2, тем больше ошибка в определении фактического диаметра колеса, поскольку амплитуда сигнала на выходе индуктивных датчиков при этом существенно (более чем в 10 раз) меняется.
В соответствии с предлагаемым изобретением в память контроллера датчика регистрации прохода колеса предварительно заносят информацию об изменении напряжений на выходе индуктивных датчиков 1, 2 … n в виде некоторых наборов функции U1=F1(l), U2=F2(l), … Un=Fn(l) при имитации прохода конкретных реборд колеса на некоторых фиксированных расстояниях от поверхности датчика регистрации прохода колеса и от боковой поверхности головки рельса, включая моделирование максимальной степени износа реборды и поверхности катания колеса и рельса, где l - расстояние от колеса до некоторой опорной точки на рельсе по ходу движения колеса, а k - число имитируемых проходов и, соответственно, количество наборов функций U1=F1(l), U2=F2(l), … Un=Fn(l). Во время работы датчика регистрации прохода колеса при проходе реборды над его поверхностью фактические данные об изменении напряжений на выходе индуктивных датчиков u1=f1(t), u2=f2(t)… fn(t) в реальном масштабе времени заносят в память контроллера, затем эти функции, с учетом вычисленной скорости прохода колеса, преобразуют в функции u1=f1(l), u2=f2(l), … un=fn(l), после чего сравнивают их с наборами функций U1=F1(l), U2=F2(l), … Un=Fn(l), хранимых в памяти контроллера. При совпадении с определенной степенью точности с одним из наборов функций, хранимых в памяти контроллера, устанавливают факт прохождения над индуктивными датчиками именно реборды колеса соответствующего диаметра, а при не совпадении - реконструируют функции напряжений u1=f1(l), u2=f2(l), … un=fn(l), с учетом максимального отклонения значения напряжения одной или нескольких функций U1=F1(l), U2=F2(l), … Un=Fn(l), а затем no полученным функциям устанавливают факт прохождения над индуктивными датчиками именно реборды колеса и его диаметр.
Функции U1=f1(l), u2=f2(l), … un=fn(l) реконструируют относительно функций U1=F1(l), U2=F2(l), … Un=Fn(l), путем умножения всех значений функций u1=f1(l), u2=f2(l), … un=fn(l) на некоторый коэффициент  , где Uмакс - максимальное значение отклонения напряжения из всех наборов функций U1=F1(l), U2=F2(l) … Un=Fn(l), хранимых в памяти процессора, а uмакс - максимальное отклонение значения напряжения одной из функций, зарегистрированных во время работы датчика при проходе колеса, и преобразованных в функции u1=f1(l), u2=f2(l), … un=fn(l).
, где Uмакс - максимальное значение отклонения напряжения из всех наборов функций U1=F1(l), U2=F2(l) … Un=Fn(l), хранимых в памяти процессора, а uмакс - максимальное отклонение значения напряжения одной из функций, зарегистрированных во время работы датчика при проходе колеса, и преобразованных в функции u1=f1(l), u2=f2(l), … un=fn(l).
Также коэффициент К можно определять с учетом ранее имитируемых проходов колеса с неизношенной ребордой и неизношенной поверхностью катания колеса (что соответствует максимально возможному удалению реборды от поверхности датчика регистрации прохода колеса) и при проходе колеса с максимально изношенной ребордой и максимально изношенной поверхностью катания колеса (что соответствует минимально возможному удалению реборды колеса от поверхности датчика регистрации прохода колеса), а именно
 ,
,
где  - максимальное отклонение значения напряжения из наборов функций
- максимальное отклонение значения напряжения из наборов функций  =
= ,
,  =
= …
…  =
= , соответствующих имитируемым проходам колеса с максимальным удалением реборды от поверхности датчика регистрации прохода колеса, a
, соответствующих имитируемым проходам колеса с максимальным удалением реборды от поверхности датчика регистрации прохода колеса, a  - максимальное отклонение значения напряжения из наборов функций
- максимальное отклонение значения напряжения из наборов функций  =
= ,
,  =
= , …
, …  =
= , соответствующих имитируемым проходам колеса с минимальным удалением реборды от поверхности датчика регистрации прохода колеса, uмакс - максимальное отклонение значения напряжения одной из функций, зарегистрированных во время работы датчика при проходе колеса и преобразованных в функции u1=f1(l), u2=f2(l) … un=fn(l).
, соответствующих имитируемым проходам колеса с минимальным удалением реборды от поверхности датчика регистрации прохода колеса, uмакс - максимальное отклонение значения напряжения одной из функций, зарегистрированных во время работы датчика при проходе колеса и преобразованных в функции u1=f1(l), u2=f2(l) … un=fn(l).
Или же фактически полученные данные на выходе индуктивных датчиков, преобразованные в функции u1=f1(l), u2=f2(l), … un=fn(l), нормируют относительно некоторого усредненного номинального значения Nмакс путем умножения всех значений функций u1=f1(l), u2=f2(l) … un=fn(l) на коэффициент  , где uмакс - максимальное отклонение значения напряжения одной из функций u1=f1(l), u2=f2(l), … un=fn(l).
, где uмакс - максимальное отклонение значения напряжения одной из функций u1=f1(l), u2=f2(l), … un=fn(l).
Фактически полученные на выходе индуктивных датчиков данные u1=f1(t), u2=f2(t) … fn(t) до преобразования в функции u1=f1(l), u2=f2(l), … un=fn(l) могут быть сглажены и очищены от помех методами математической обработки сигнала.
Значения Uмакс, , и Nмакс можно предварительно определять и заносить в память контроллера.
Таким образом, предлагаемый способ позволяет повысить надежность регистрации именно реборды колеса, повысить точность и надежность определения диаметра колеса независимо от расстояния, на котором реборда колеса проходит от боковой поверхности головки рельса и от поверхности датчика регистрации прохода колеса. Способ обеспечивает регистрацию прохода колеса при любом диаметре, любой скорости прохода колес и любой степени износа реборды и поверхности катания колеса и рельса, обеспечивая, таким образом, расширение функциональных возможностей.








Способ регистрации прохода колеса рельсового транспортного средства и способ определения диаметра колеса рельсового транспортного средства
Способ и устройство контроля целостности поезда
Устройство для крепления опоры датчиков или коммутационных средств на рельсах
Способ определения диаметра колеса рельсового транспортного средства
Устройство для определения расстояния между локомотивом и объектом, расположенным на маршруте следования локомотива
Способ повышения устойчивости работы датчика регистрации прохода колеса к воздействию температуры окружающей среды и бросков тягового тока и соответствующий датчик регистрации прохода колеса
Автоматизированная система закрепления железнодорожного подвижного состава
Устройство для закрепления железнодорожного состава
Способ формирования информационной модели поезда
Способ обеспечения безопасности движения железнодорожного транспорта
Устройство для определения схода колесных пар подвижного состава или волочащейся металлической детали и датчик контроля схода подвижного состава
Способ контроля участков пути при помощи бесстыковых тональных рельсовых цепей
Система микропроцессорной централизации стрелок и сигналов мпц-и
Устройство мониторинга и диагностики грузового вагона

