Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ МНОГОСОПЛОВОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ
Вид РИД
Изобретение
Область техники
Изобретение относится к области управления движением космических аппаратов (КА) с помощью многосопловой реактивной двигательной установки (ДУ) и применяется для управления движением центра масс (ЦМ) КА и вращения вокруг него, а также стабилизации требуемой ориентации с помощью ДУ. Наиболее эффективная область его использования в задачах обеспечения высокоточной коррекции орбиты КА и межорбитального маневрирования.
Предшествующий уровень техники
Изложенная задача управления движением КА с помощью ДУ нашла широкое отражение в литературе, см., например, Б.В. Раушенбах, Е.Н. Токарь «Управление ориентацией космических аппаратов», М., «Наука», 1974, с. 106-112; К.Б. Алексеев, Г.Г. Бебенин «Управление космическими летательными аппаратами», М., «Машиностроение», 1974, с. 143; Г.З. Давлетшин «Активно-гравитационные маневры космических аппаратов, М., «Машиностроение», 1980; патент RU 2124461, опубл. 10.01.99, патент RU 2006430, опубл. 30.01.94; Патент US 5130931 А, опубл. 14.07.1992, и др.
В изобретении по патенту (RU 2124461, опубл. 10.01.99) описан способ управления КА с помощью реактивных ДУ с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг. Это позволяет решать весь комплекс задач по перемещению КА в пространстве и вращению вокруг его центра масс. При этом для реализации полной управляемости требуется установка 8 двигателей на различных гранях аппарата. Существенным недостатком такого подхода является то, что при перемещении ЦМ аппарата в пространстве, за счет установки ДУ под углом относительно оси результирующего вектора тяги, часть импульса скорости (и соответственно топлива) расходуется на взаимную компенсацию моментов от пары двигателей, что может приводить к неэффективному расходу рабочего тела.
Известен способ управления движением КА с использованием многосопловой ДУ, включающий расчет коэффициентов дросселирования для каждого из двигателей и применением для стабилизации КА управляющих двигателей маховиков (УДМ) (Патент US 5130931, опубл. 14.07.1992). Это техническое решение является наиболее близким к заявляемому способу управления КА и взято за прототип, поскольку реализует управление группой двигателей и имеет идентичный принцип управления. Алгоритм управления блоком реактивных двигателей парирует ошибки ориентации по углам курса, тангажа и крена, а также линейной скорости КА для выработки управляющего сигнала, в виде вектора тяги F и вектора моментов Т, каждый из которых состоит из 3-х ортогональных компонент. В качестве исполнительного органа может выступать как ДУ, так и электромагнитное устройство или УДМ. Генерируется шесть разностных уравнений:
и
где aj - максимальный момент, который может создать j-й двигатель, bj - максимальная тяга, которую может создать j-й двигатель, kj - переменная, представляющая коэффициент дросселирования j-го двигателя, который может меняться в диапазоне от 0 до 1 и подлежит определению. Шесть уравнений суммируются, и в результате получается единственное скалярное уравнение, связывающее переменные aj с показателем качества Z:

В результате решения задачи линейного программирования симплекс-методом определяются значения kj, которые максимизируют функционал Z. Значения kj применяются для управления соответствующими двигателями.
Одним из недостатков предложенного оптимизационного подхода к управлению ДУ является то, что, максимизируя значение Z, которое характеризует как перемещение центра масс, так и вращение вокруг него, нельзя четко определить вклад в функционал Z влияний от вращения КА и его линейного перемещения, что, в общем случае, приводит к неэффективному расходу топлива.
Вторым недостатком известного способа управления блоком ДУ является невозможность обеспечить заданную среднюю тягу ДУ и удерживать длительное время требуемую ориентацию.
Раскрытие изобретения
Ставится задача управления движением ЦМ КА с обеспечением его длительной прецизионной стабилизации в пространстве и одновременным поддержанием заданной средней тяги при парировании накопления кинетического момента КА по осям, перпендикулярным результирующему вектору тяги. Дополнительная задача заключается в осуществлении высокоточного маневрирования КА как при длительном режиме работы ДУ, так и близком к импульсному и реализуется путем применения уточненной математической модели работы ДУ в режиме тактовой работы.
Для решения поставленной задачи управления космическим аппаратом (КА), снабженным многосопловой двигательной установкой (ДУ), включающего коррекцию орбиты КА путем приложения результирующего вектора тяги ДУ к его корпусу для отработки импульса требуемой величины с определением коэффициентов дросселирования для расчета тяги каждого из трех и более сопел двигателя, согласно изобретению для ДУ применен режим тактовой работы (РТР), предусматривающий разбиение всего интервала маневрирования на рабочие такты, в каждом из которых коэффициенты дросселирования рассчитываются по заданному значению средней тяги ДУ и требуемым воздействиям на КА для парирования накопления его кинетического момента по осям, перпендикулярным результирующему вектору тяги, определенным в процессе работы ДУ, путем решения системы линейных уравнений.
Указанная совокупность признаков изобретения, отраженная в первом независимом пункте формулы, позволяет получить следующие технические результаты: поддерживать заданную среднюю тягу и увеличить допустимую продолжительность работы ДУ, без потери точности ориентации КА; повысить эффективность расхода топлива на задачи маневрирования КА; компенсировать разнотяговость сопел двигателя, погрешность их установки и ориентации, а также влияние смещения ЦМ по мере выработки топлива.
Вариант осуществления изобретения с использованием уточненной математической модели РТР ДУ позволяет повысить точность маневрирования аппарата как при длительном режиме работы ДУ, так и близком к импульсному.
Предпочтительный вариант изобретения использует приборы стабилизации углового положения КА для повышения точности ориентации.
Вариант осуществления изобретения при реализации маневра с нулевой уставкой на требуемое значение средней тяги ДУ позволяет осуществлять быструю стабилизацию углового вращения КА и разгрузку кинетического момента УДМ по осям, перпендикулярным результирующему вектору тяги.
Краткое описание чертежей
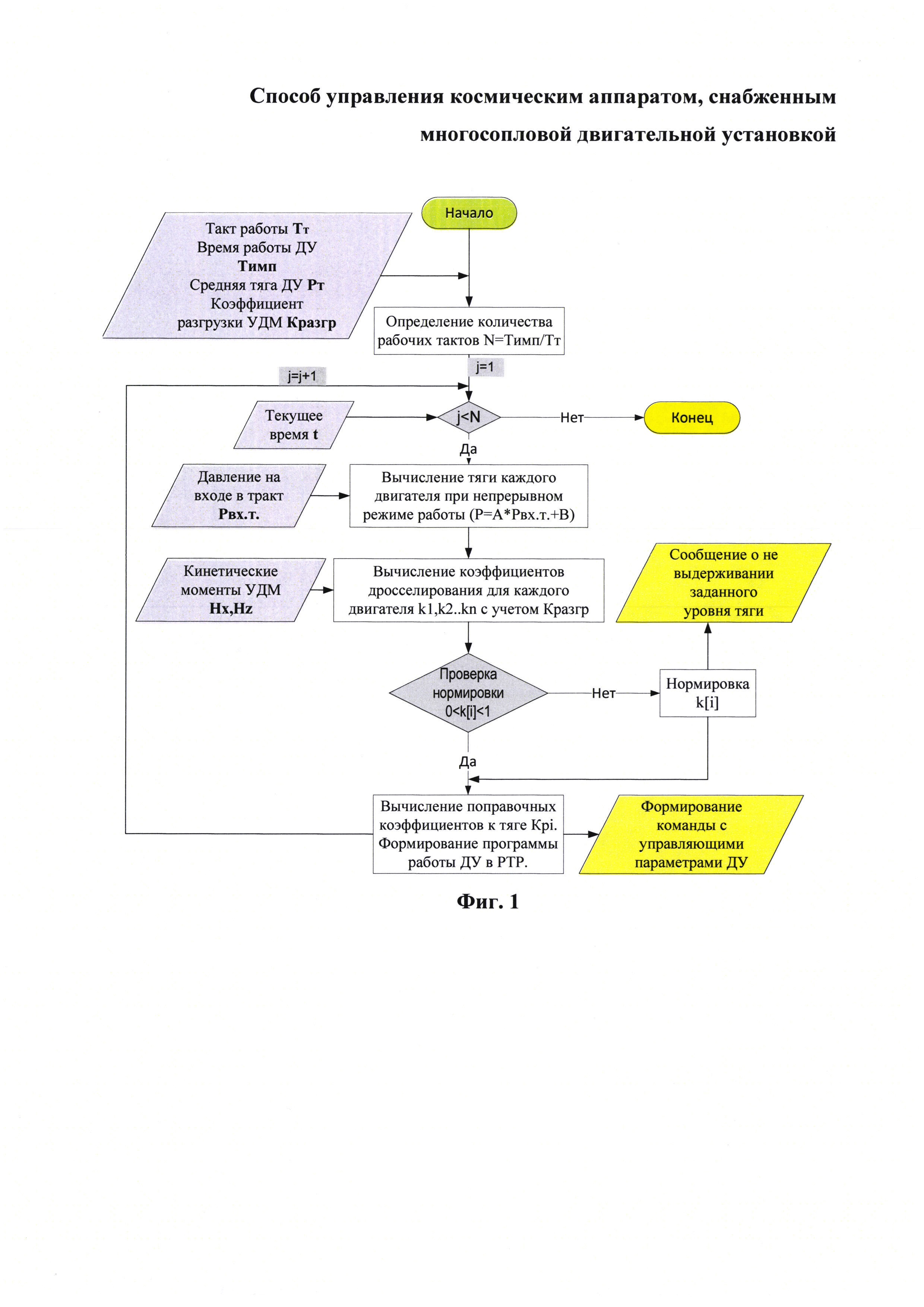
На фиг. 1 показана блок-схема работы алгоритма управления ДУ.
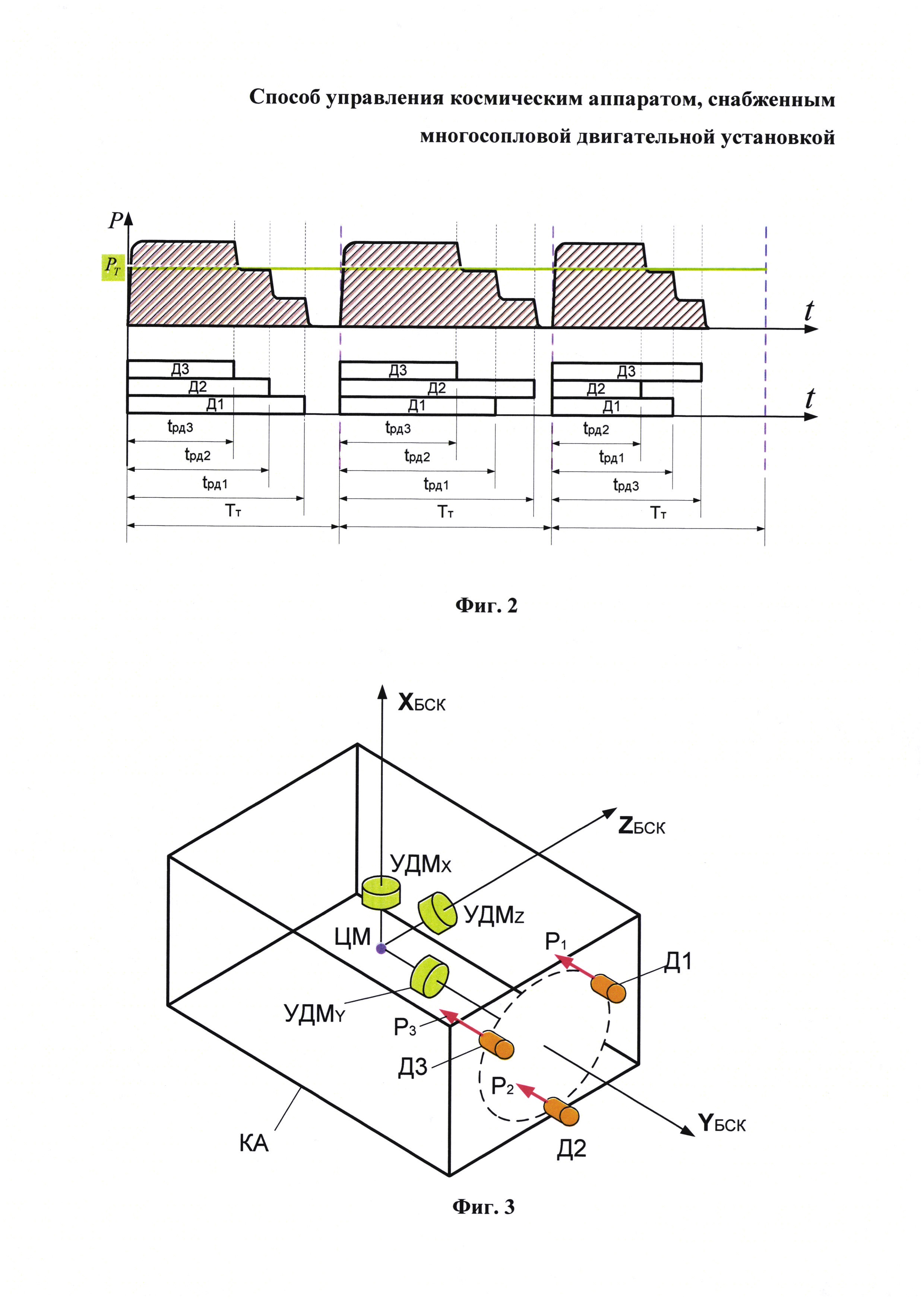
На фиг. 2 изображен режим тактовой работы ДУ.
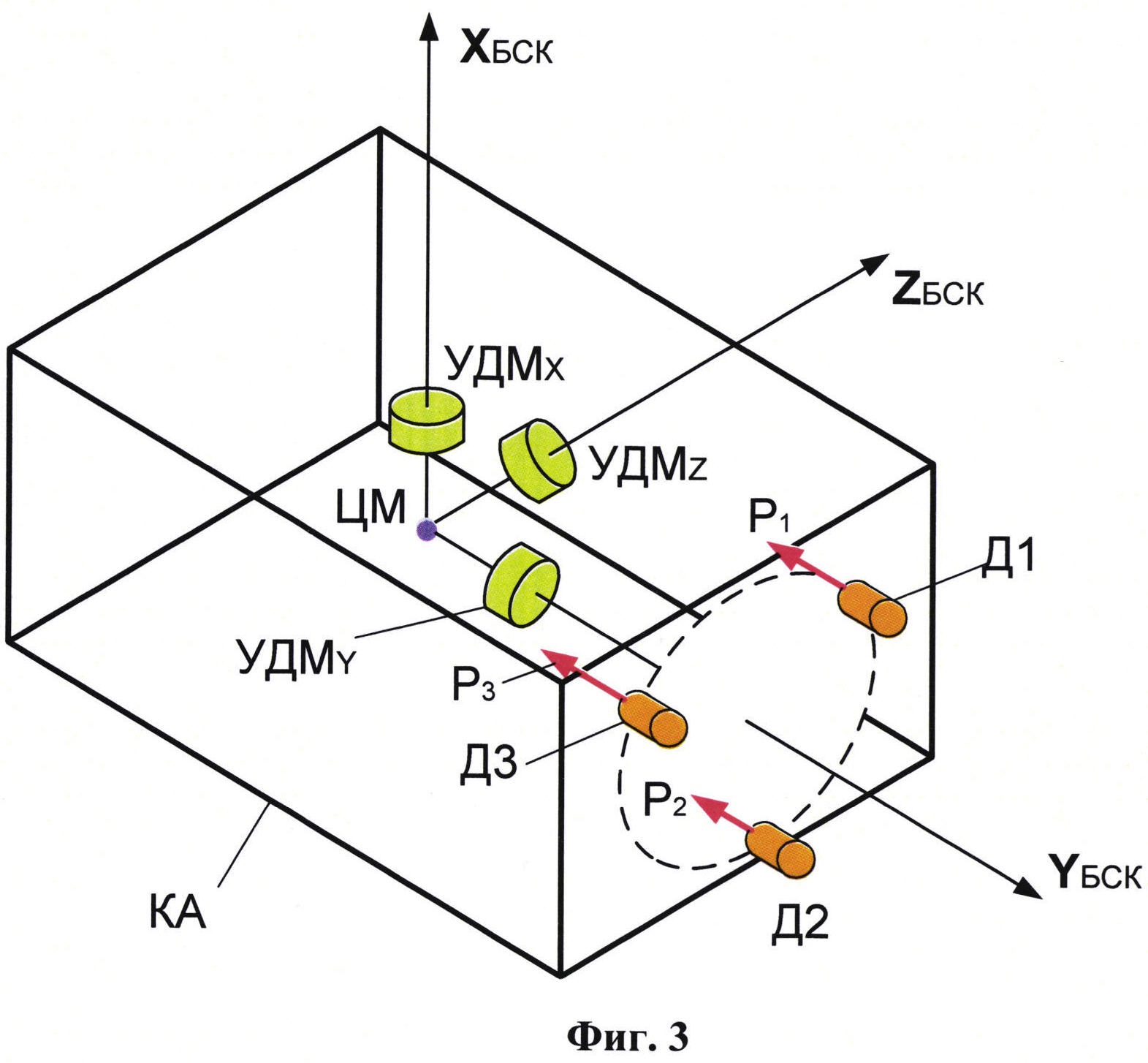
На фиг. 3 схематично показан вариант конструктивного исполнения КА в изометрической проекции.
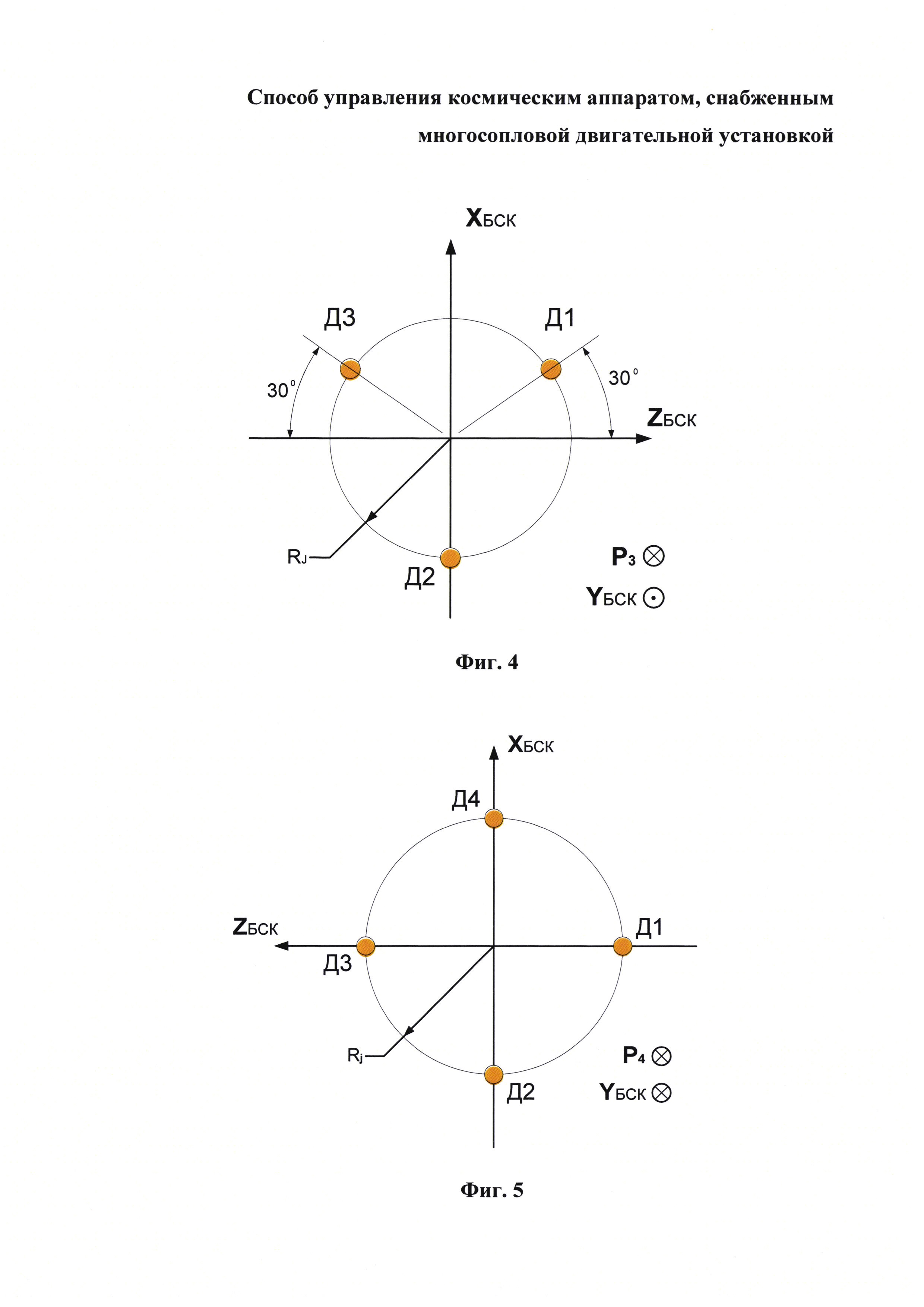
На фиг. 4 представлена компоновка ДУ из трех равномерно расположенных на окружности радиуса RJ двигателей.
На фиг. 5 показана компоновка ДУ из четырех равномерно расположенных на окружности радиуса RJ двигателей.
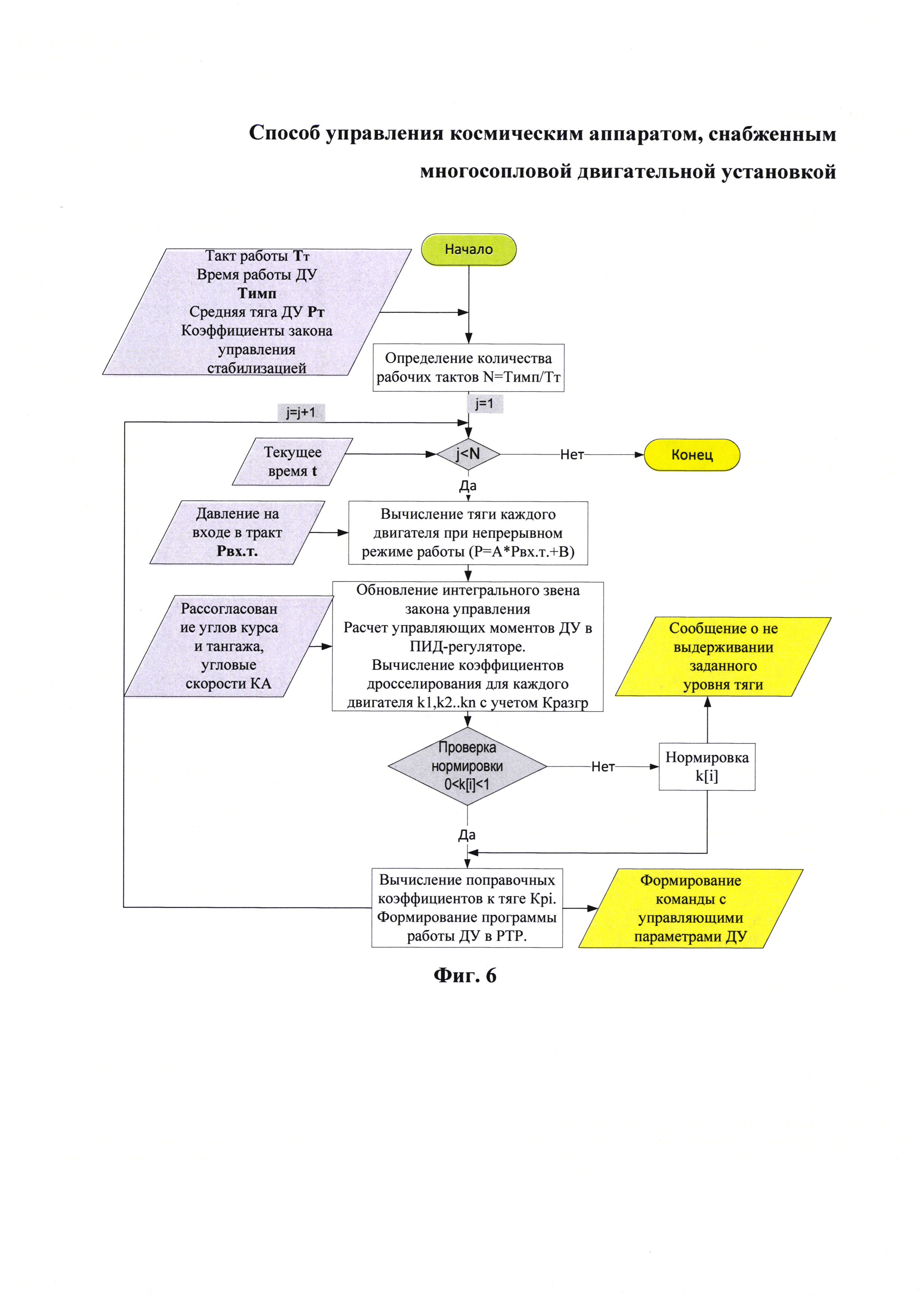
На фиг. 6 изображена блок-схема работы алгоритма управления ДУ без использования У ДМ в контуре стабилизации.
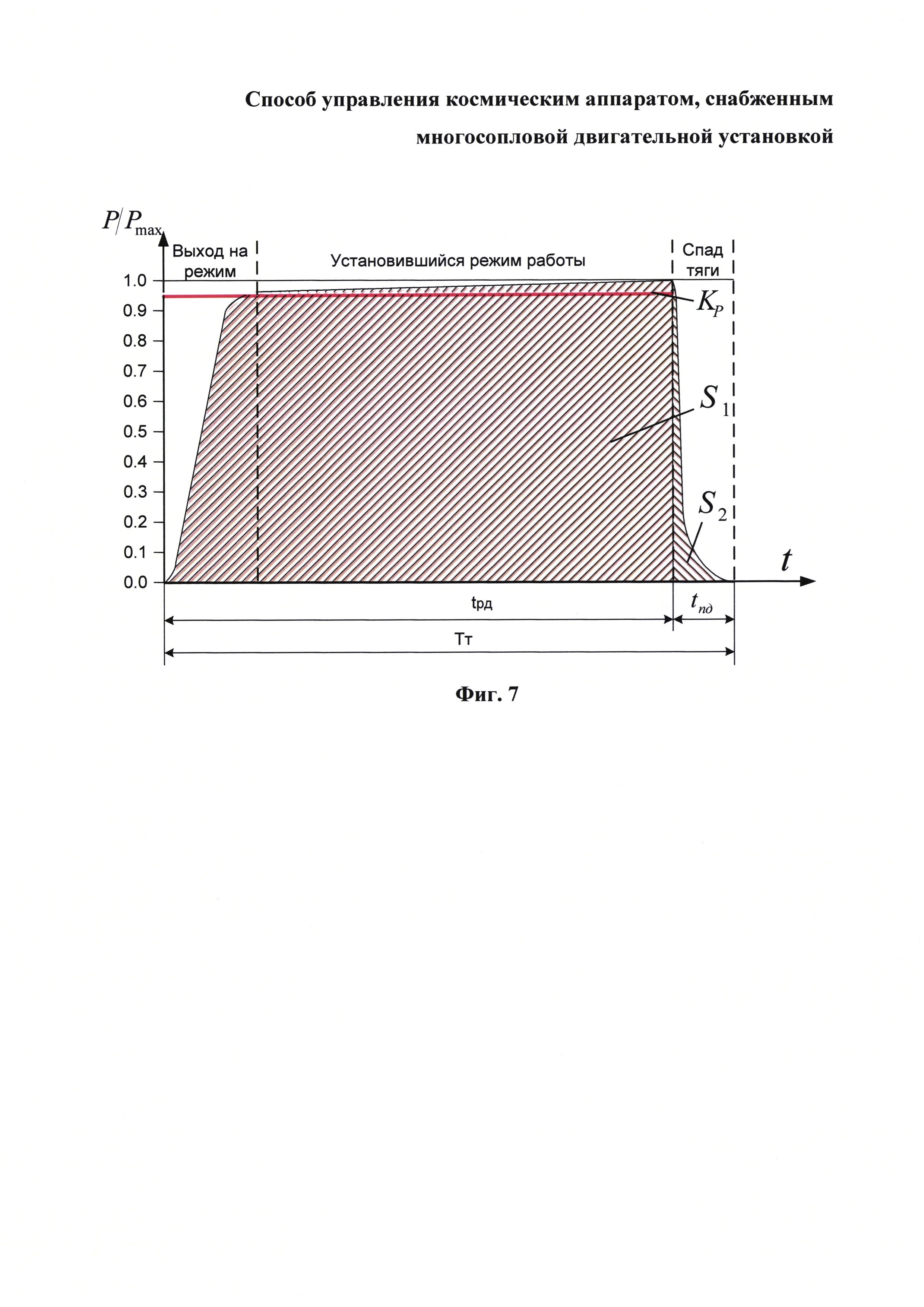
На фиг. 7 показан характер изменения тяги двигателя в рабочем такте.
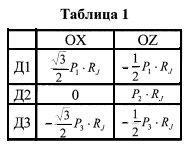
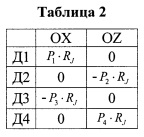
В таблицах 1 и 2 указаны моменты двигателей относительно осей базовой системы координат (БСК) аппарата, эквивалентные компоновки из трех и четырех двигателей соответственно.
Осуществление изобретения
Способ управления космическим аппаратом (КА), снабженным многосопловой двигательной установкой (ДУ), включающий коррекцию орбиты КА путем приложения результирующего вектора тяги ДУ к его корпусу для отработки импульса требуемой величины, базируется на определении коэффициентов дросселирования для расчета тяги каждого из трех и более сопел двигателя. В режиме тактовой работы (РТР) ДУ, предусмотрено разбиение всего интервала маневрирования на рабочие такты, в каждом из которых коэффициенты дросселирования рассчитываются по заданному значению средней тяги ДУ и требуемым воздействиям на КА для парирования накопления его кинетического момента по осям, перпендикулярным результирующему вектору тяги, определенным в процессе работы ДУ, посредством решения системы линейных уравнений.
Построение требуемой ориентации КА перед включением ДУ и управление движением вокруг ЦМ реализуется с помощью приборов стабилизации углового положения КА. Парирование набора кинетического момента аппарата осуществляется самой ДУ на фоне решения основной задачи по выдаче импульса требуемой величины. Длительность тактов, на которые разбивается весь интервал маневрирования, может варьироваться от нескольких шагов управления бортовой вычислительной машины до нескольких десятков секунд. В случае невозможности обеспечения в такте заданной средней тяги приоритетной является выдача моментов для разгрузки кинетического момента и безусловное удержание требуемой ориентации КА, что позволяет выполнять продолжительные по времени маневры. Применение специальной процедуры, описанной в одном из ниже следующих примеров, с использованием представленного способа управления, дает возможность производить быструю разгрузку кинетического момента аппарата по оси тяги ДУ между интервалами маневрирования. Вариант алгоритма, в котором управляющие моменты, необходимые для стабилизации КА, создаются непосредственно ДУ, позволяет выполнить задачу маневрирования в случае отказа приборов стабилизации углового положения, а также может использоваться на КА, не имеющих таковых в своем составе. Специально разработанная математическая модель для РТР ДУ позволяет повысить точность выдачи импульса и использовать предлагаемый способ управления, как при длительной работе двигателя, так и в режиме, близком к импульсному.
При использовании управляющих двигателей маховиков (УДМ) в качестве приборов стабилизации углового положения КА, в режиме выдачи импульса, переопределяются коэффициенты в законе управления УДМ таким образом, чтобы усилить реакцию маховиков для парирования раскрутки аппарата при создании момента с помощью ДУ. Физическая картина работы ДУ в любом из тактов, согласно фиг. 2, состоит в следующем. В начальный момент времени включается весь сопловой блок и на каждом шаге управления рассчитываются параметры работы ДУ в РТР и интегрируется уравнение массового расхода, а также берутся данные с УДМ по величине набранного кинетического момента. Определяются времена отключения каждого двигателя tp∂i при условии поддержания заданного значения средней тяги внутри такта и парирования накопления кинетического момента.
Пример 1. Предпочтительный вариант осуществления изобретения, согласно фиг. 3 и фиг. 4, предусматривает использование ДУ в виде блока из трех двигателей, сонаправленных с одной из осей БСК и трех УДМ, расположенных на осях БСК для управления движением КА, включает расчет коэффициентов дросселирования каждого из сопел двигателя и применение представленной ниже, уточненной математической модели РТР ДУ и обеспечивает поддержание требуемой средней тяги ДУ внутри рабочего такта при парировании накопления кинетического момента УДМ по осям, перпендикулярным результирующему вектору тяги.
На фиг. 4 показана фронтальная проекция компоновки ДУ из трех двигателей, расположенных равномерно на окружности радиусом RJ, а вектора их тяг сонаправлены с осью Y БСК, построенной на центральных осях инерции аппарата. Фактическая длительность работы каждого двигателя определяется алгоритмически с учетом компенсации набираемого маховиками кинетического момента. Для указанной компоновки ДУ в таблице 1 представлены моменты, создаваемые каждым двигателем блока относительно осей X и Z БСК. Текущие значения тяг каждого двигателя в непрерывном режиме работы Pi рассчитываются как функции от давления на входе в двигатель:

Коэффициенты ai и bi должны быть предварительно определены по результатам огневых испытаний каждого двигателя на заводе-изготовителе.
Для разгрузки УДМ рассчитываются коэффициенты дросселирования для каждого двигателя таким образом, чтобы моменты, создаваемые ДУ по осям X и Z, были подобны соответствующим кинетическим моментам УДМ Нх и Hz с коэффициентом пропорциональности Кразгр/ТТ, где ТТ - такт работы, а Кразгр - коэффициент усиления, необходимый для обеспечения устойчивой ориентации КА при маневрировании. Дополняя уравнения для разгрузки УДМ условием сохранения постоянной средней тяги ДУ, получим систему уравнений для нахождения аналогичных прототипу коэффициентов дросселирования ki:
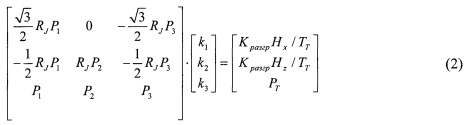
которые, в свою очередь, определяют время работы двигателя в текущем такте  .
.
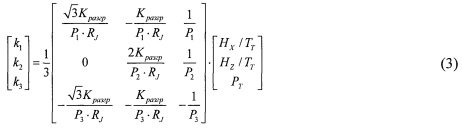
Решая систему (2) получим выражение для ki:
В случае завышенных значений требуемого уровня тяги PT возможно непопадание коэффициентов дросселирования ki в диапазон от 0 до 1. Тогда выполняется их нормировка с выдачей диагностического сообщения о невозможности поддержания заданного уровня тяги в текущем такте работы. Таким образом, время работы каждого двигателя tp∂i оказывается меньше длительности выбранного такта TT, что позволяет задавать в широком диапазоне требуемый уровень тяги PT и удерживать его длительное время.
Для повышения точности выдачи импульса разработана специальная математическая модель для РТР ДУ. Изложим ее суть на основе описания работы жидкостного ракетного двигателя. Работа такого двигателя традиционно разделяется на три характерных этапа. Выход на режим - когда после включения происходит кратковременное достижение установившегося уровня тяги. Основной режим работы - когда двигатель работает на уровне тяги, близком к максимальному. Период последействия - когда после отключения питания происходит постепенный спад тяги. Для непрерывного режима работы ДУ второй этап является основным, а первый и последний из-за малой длительности обычно пренебрежимо малы и зачастую не учитываются. Однако в случае применения режима тактовой работы, когда длительность второго этапа немногим больше или даже сопоставима с первым и третьим, игнорировать их нельзя. В связи с этим требуется разработка более точной математической модели работы ДУ, учитывающей как этап выхода на режим, так и спада тяги. На фиг. 7 схематично показан характер работы двигателя на одном рабочем такте.
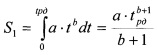
Для жидкостных двигателей тяга обычно является функцией, зависящей от давления топлива на входе в двигатель. По результатам огневых испытаний двигателей определяются эти зависимости на различных уровнях входного давления и задается некоторая аппроксимирующая функция (обычно линейная) вида уравнения (1). Она достаточно корректно отражает непрерывный режим работы, описывая огибающую для максимальной тяги двигателя при текущем давлении. Применение ее для РТР двигателя требует введения и определения поправочного коэффициента к тяге. Кривые выхода на режим и спада тяги с достаточной степенью точности могут быть описаны двумя степенными функциями вида у=axb. В результате требуется определить коэффициенты указанных функций, воспользовавшись следующим алгоритмом. Аналитически определяются площадь под графиком S1 согласно фиг. 7:
и площадь S2, причем, в силу свойств степенной функции и характера кривой спада тяги, интегрирование здесь ведется не от нуля, а от единицы и также определяется аналитическая формула:

Значение времени последействия tn∂ определяется с учетом свойства степенной функции и для однозначности расчета задается зависимостью от длительности такта и фактического времени работы двигателя:
tn∂=TT-tp∂
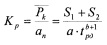
Определяются коэффициенты а, b и bn путем аппроксимации данных огневых испытаний двигателя для различных значений входного давления pвx.m.. Общий вид расчетных формул для них:



Коэффициент an имеет свой физический смысл, поскольку определяет величину установившегося значения давления на момент конца рабочего такта и находится аналитически в следующем виде:

Среднее интегральное значение давления на текущем такте с учетом периода последействия определим как:

Тогда поправочный коэффициент запишется через отношение среднего интегрального значения и установившегося, которое, в свою очередь, определяется уравнением (4). В итоге запишем:
В результате зависимость для тяги двигателя примет вид:
Р=Кр⋅(А⋅рвх.m.+В)
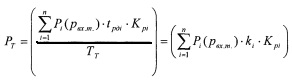
Для конкретного такта работы общий вид уравнения для средней тяги ДУ, применительно к группе из n сонаправленных двигателей, с учетом описанного выше алгоритма управления, можно записать в виде:
Таким образом, априори определяются по данным огневых испытаний все требуемые коэффициенты к аппроксимирующим функциям. В результате работы алгоритма управления ДУ рассчитываются коэффициенты дросселирования для каждого двигателя ki и длительность открытия клапанов tp∂i.
Изложенный алгоритм использует аналитическую математику и применим для бортовой реализации на перспективных космических аппаратах путем записи в память бортовой машины. Непосредственно в полете, из телеметрической информации, берется значение входного давления топлива и при заданных в уставке на маневр уровне тяги и длительности рабочего такта определяются поправочный коэффициент и расчетное значение тяги ДУ на каждом шаге вычислений.
Пример 2. Исполнение аналогично первому примеру, но отличается применением четырех двигателей вместо трех.
Для четырех сонаправленных двигателей, расположенных симметрично относительно центра масс, как показано на рисунке 5, необходимо дополнить систему (3) уравнением связи, которым может служить условие равномерного распределения тяги по парам двигателей, находящихся на одной линии, проходящей через ЦМ:

где Р1 - тяга двигателя Д1, а Р3 - тяга двигателя Д3.
В этом случае получим следующее выражение для коэффициентов дросселирования:
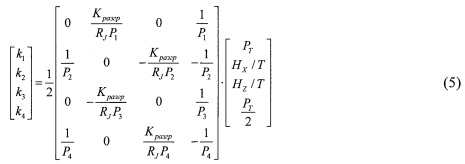
Для большего числа двигателей следует расширять систему (5) дополнительными уравнениями связи, однако применение более чем 4 сонаправленных двигателей уже не приводит к существенным улучшениям качества управления КА, а может лишь повысить надежность его работы при выходе из строя одного или нескольких двигателей.
Пример 3. Вариант реализации, аналогичный первому примеру с нулевой уставкой тяги применительно к любому числу двигателей в блоке.
Применение описанного способа с нулевой уставкой тяги PT позволяет производить быструю стабилизацию КА при вращении и разгрузку кинетического момента УДМ по осям, перпендикулярным результирующему вектору тяги ДУ. Для разгрузки УДМ по оси, сонаправленной с вектором тяги ДУ, используется следующая процедура.
1. Разворот КА с помощью УДМ на 90 градусов вокруг одной из осей, перпендикулярных вектору тяги ДУ для перетекания кинетического момента на эти оси.
2. Включение ДУ и выполнение нескольких тактов работы согласно изложенному способу с заданной тягой PT=0 для разгрузки УДМ по осям, перпендикулярным вектору тяги ДУ до заданного порогового значения.
3. Разворот КА в первоначальное положение.
Пример 4. Исполнение, аналогичное первому и второму примерам, но не использует УДМ в контуре стабилизации для управления ориентацией по курсу и тангажу. Управление по крену может осуществляться как УДМ, так и реактивными двигателями по отдельному каналу. Блок-схема данного варианта представлена на фиг. 6.
В отличие от предпочтительного варианта исходными данными для алгоритма являются не кинетические моменты УДМ и коэффициент разгрузки, а рассогласования углов курса и тангажа, угловые скорости КА и коэффициенты закона управления стабилизацией КА. Формулы для расчета дросселирующих коэффициентов примут вид:
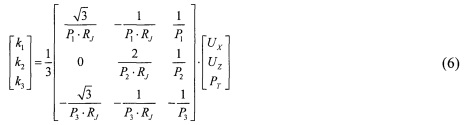
для тройки и
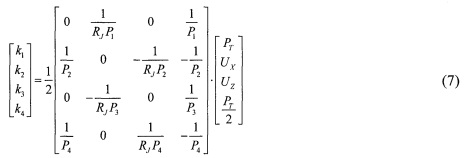
для четверки, соответственно.
Управляющие моменты UX и UZ в выражениях (6) и (7) рассчитываются на каждом шаге по формулам:
UX=K1⋅DX+K2⋅ωX+K3⋅SX,
UZ=K1⋅DZ+K2⋅ωZ+K3⋅SZ,
где K1, K2, K3 - коэффициенты закона управления, DX, DZ - рассогласования углов ориентации, ωX, ωZ - угловые скорости, SX, SZ - интегральные суммы углов рассогласования.
Конструктивная реализация многосопловой ДУ как традиционной комбинации промышленно выпускаемых двигателей, трубопроводов, подводящих к ним запасенное рабочее тело (гидразин или ксенон), и элементов управляющей двигателями электроавтоматики, проблем не представляет, что подтверждается большим числом эксплуатируемых во всем мире космических аппаратов.
Способ получения альфа гидрида алюминия
Способ получения альфа гидрида алюминия
Спутниковая система связи и наблюдения приэкваториальных широт
Способ огневых испытаний жидкостных ракетных двигателей
Спутниковая система связи и наблюдения в заданном диапазоне широт
Способ выведения космических аппаратов на орбиту

