Результат интеллектуальной деятельности: УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству помощи при вождении и к способу помощи при вождении для выполнения помощи при вождении, чтобы избегать столкновения между транспортным средством и объектом.
УРОВЕНЬ ТЕХНИКИ
[0002] Обычно вышеуказанное устройство помощи при вождении получает из бортового датчика, к примеру бортового радара, относительное состояние касательно рассматриваемого транспортного средства, объекта, который присутствует в направлении движения транспортного средства и который требует управления замедлением транспортного средства. Объект представляет собой, например, паркующееся транспортное средство, движущееся впереди транспортное средство или встречное транспортное средство. На основе полученной относительной взаимосвязи между объектом и рассматриваемым транспортным средством, выполняется помощь при вождении, к примеру, аварийный тональный сигнал или предупреждающее столкновение торможение.
[0003] Традиционно, известно устройство, описанное в патентном документе 1, в качестве примера устройства помощи при вождении. Устройство аварийной сигнализации о столкновениях сзади, описанное в патентном документе 1, включает в себя: средство формирования аварийных сигналов, которое формирует аварийный сигнал, когда время до столкновения рассматриваемого транспортного средства с движущимся впереди транспортным средством составляет пороговое значение или меньше; средство определения смены полосы движения движущимся впереди транспортным средством, которое определяет, сменяет или нет движущееся впереди транспортное средство полосу движения; и средство регулирования времени, которое задерживает время аварийного сигнала, который должен формироваться посредством средства формирования аварийных сигналов, когда определяется то, что движущееся впереди транспортное средство сменяет полосу движения. Узел определения смены полосы движения движущимся впереди транспортным средством находит ускорение рассматриваемого транспортного средства и коэффициент перекрытия, указывающий коэффициент того, насколько рассматриваемое транспортное средство и движущееся впереди транспортное средство перекрываются между собой в направлении ширины транспортного средства, и затем определяет на основе значений, обнаруженных таким образом, и пороговых значений, сменяет или нет движущееся впереди транспортное средство полосу движения. Когда коэффициент перекрытия составляет пороговое значение или меньше, и ускорение рассматриваемого транспортного средства составляет пороговое значение или больше, средство регулирования времени регулирует пороговое значение, которое должно сравниваться со временем до столкновения, так что значение меньше нормального значения. Причина этого заключается в следующем. Когда коэффициент перекрытия составляет пороговое значение или меньше, и ускорение рассматриваемого транспортного средства составляет пороговое значение или больше, водитель преднамеренно приближается к движущемуся впереди транспортному средству, так что рассматриваемое транспортное средство обгоняет движущееся впереди транспортное средство, которое сменяет полосу движения на смежную полосу движения, так что риск столкновения ниже случая приближения при нормальном вождении, и может задерживаться время для того, чтобы формировать аварийный сигнал.
[0004] В связи с этим, посредством выполнения такого регулирования, чтобы задерживать время для того, чтобы формировать аварийный сигнал, на основе низкой вероятности столкновения, может уменьшаться необязательное формирование аварийного сигнала и может уменьшаться некомфортное ощущение водителя.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0005] Патентный документ 1. Публикация заявки на патент Японии номер 2011-197915 (JP 2011-197915 A)
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЗАДАЧА, РЕШАЕМАЯ ИЗОБРЕТЕНИЕМ
[0006] Между тем, коэффициент перекрытия рассматриваемого транспортного средства с движущимся впереди транспортным средством может изменяться вследствие изменений формы полос движения, к примеру, формы дороги, например, искривленной дороги, а также увеличения и уменьшения числа полос движения. Например, устройство аварийной сигнализации о столкновениях сзади, описанное в патентном документе 1, и аналогичные устройства не могут отличать надлежащим образом то, что движущееся впереди транспортное средство движется по искривленной дороге или сменяет полосу движения. Вследствие этого, управление активацией помощи при вождении становится неопределенным, что может приводить к тому, что не может уменьшаться некомфортное ощущение водителя.
[0007] Настоящее изобретение осуществлено с учетом вышеуказанных обстоятельств. Задача настоящего изобретения заключается в том, чтобы предоставить устройство помощи при вождении и способ помощи при вождении, каждый из которых позволяет более целесообразно управлять необходимостью помощи при вождении, связанной с избеганием столкновения, и каждый из которых позволяет эффективно сдерживать необязательную активацию помощи при вождении.
СРЕДСТВО РЕШЕНИЯ ЗАДАЧИ
[0008] Далее описывается средство для решения задачи и его преимущества.
Устройство помощи при вождении, чтобы достигать вышеуказанной цели, представляет собой устройство помощи при вождении, которое выполняет помощь при вождении для транспортного средства, чтобы избегать столкновения с объектом, присутствующим в направлении движения транспортного средства, на основе времени до столкновения в качестве времени, которое пройдет до столкновения транспортного средства и объекта друг с другом, и устройство помощи при вождении включает в себя: узел обнаружения поперечного изменения, который принимает величину относительного зависимого от времени изменения между транспортным средством и объектом в поперечном направлении, перпендикулярном направлению движения транспортного средства; первый узел хранения, в котором время руления сохраняется в качестве времени, требуемого для транспортного средства, чтобы избегать объекта посредством руления; второй узел хранения, в котором пороговое значение активации сохраняется в качестве порогового значения, используемого для того, чтобы определять активацию помощи при вождении на основе величины поперечного относительного зависимого от времени изменения, обнаруженной таким образом; и узел управления помощью, который сдерживает активацию помощи при вождении в то время, когда величина поперечного относительного зависимого от времени изменения, обнаруженная, когда время до столкновения составляет время руления или больше, составляет пороговое значение активации или больше.
[0009] Способ помощи при вождении, чтобы достигать вышеуказанной цели, представляет собой способ помощи при вождении для выполнения помощи при вождении для транспортного средства, чтобы избегать столкновения с объектом, присутствующим в направлении движения транспортного средства, на основе времени до столкновения в качестве времени, которое пройдет до столкновения транспортного средства и объекта друг с другом, и способ помощи при вождении включает в себя: этап обнаружения поперечного изменения для обнаружения величины относительного зависимого от времени изменения между транспортным средством и объектом в поперечном направлении, перпендикулярном направлению движения транспортного средства; и этап управления помощью для сдерживания активации помощи при вождении на основе времени руления, которое сохраняется в узле хранения и которое является временем, требуемым для транспортного средства, чтобы избегать объекта посредством руления, и порогового значения активации, которое является пороговым значением, используемым для того, чтобы определять активацию помощи при вождении на основе величины поперечного относительного зависимого от времени изменения, обнаруженной таким образом, причем активация помощи при вождении сдерживается в то время, когда величина поперечного относительного зависимого от времени изменения, обнаруженная, когда время до столкновения составляет время руления или больше, составляет пороговое значение активации или больше.
[0010] Согласно такой конфигурации или способу, на основе величины поперечного относительного зависимого от времени изменения объекта определяется, сдерживается или нет активация помощи при вождении, связанной с избеганием столкновения. В случае помощи при вождении, связанной с избеганием столкновения, если относительная позиция объекта в отношении транспортного средства поперечно уходит с направления движения транспортного средства, вероятность столкновения между транспортным средством и объектом является низкой, так что необходимость активировать помощь при вождении является низкой. С учетом этого, величина относительного зависимого от времени изменения объекта сравнивается с пороговым значением активации, и когда величина относительного зависимого от времени изменения объекта превышает пороговое значение активации, и вероятность столкновения является низкой, сдерживается активация помощи при вождении, связанной с избеганием столкновения. В силу этого, в случае, если водитель считает, что помощь является необязательной, например, в случае, если водитель выполняет операцию избегания посредством руления, или движущееся впереди транспортное средство сменяет полосу движения, активация помощи при вождении сдерживается, за счет этого уменьшая вероятность того, что водитель испытывает беспокойство.
[0011] В случае, если величина поперечного относительного зависимого от времени изменения используется для определения относительно того, сдерживается или нет помощь при вождении, связанная с избеганием столкновения, даже если поперечные позиции движущегося впереди транспортного средства и транспортного средства, оба из которых движутся по идентичной дороге, отклоняются друг от друга вследствие кривизны и т.п., величина поперечного относительного зависимого от времени изменения является небольшой, но когда поперечные позиции движущегося впереди транспортного средства и транспортного средства отклоняются друг от друга вследствие смены полосы движения, величина поперечного относительного зависимого от времени изменения является большой. Соответственно, можно отличать смену полосы движения от кривизны и т.п. надлежащим образом.
[0012] В качестве предпочтительной конфигурации узел обнаружения поперечного изменения обнаруживает относительную поперечную скорость, которая представляет собой относительную скорость движения объекта в поперечном направлении, в качестве величины поперечного относительного зависимого от времени изменения между транспортным средством и объектом.
[0013] Согласно такой конфигурации величина зависимого от времени изменения между транспортным средством и объектом обнаруживается на основе относительной поперечной скорости. Если относительная поперечная скорость объекта является небольшой, может быть оценено, что объект не уходит с направления движения транспортного средства, а если относительная поперечная скорость является большой, может быть оценено, что объект уходит с направления движения транспортного средства. Относительная поперечная скорость, которая вычисляется между транспортным средством и объектом, движущимся по идентичной дороге, попадает в предварительно определенный диапазон, так что можно отличать изменение вследствие формы дороги, к примеру, кривизны, от изменения вследствие смены полосы движения, надлежащим образом.
[0014] В качестве предпочтительной конфигурации устройство помощи при вождении дополнительно включает в себя узел получения времени торможения, который получает время торможения, которое является временем, требуемым для транспортного средства, чтобы выполнять избегание столкновения посредством торможения, и узел управления помощью сдерживает активацию помощи при вождении при условии, что величина поперечного относительного зависимого от времени изменения, обнаруженная, когда время до столкновения составляет время руления или больше, составляет пороговое значение активации или больше, и время до столкновения меньше времени торможения.
[0015] Согласно такой конфигурации даже в случае, если избегание столкновения является затруднительным посредством нормального торможения, если водитель выполняет операцию избегания посредством руления, или если движущееся впереди транспортное средство сменяет полосу движения, активация помощи при вождении может сдерживаться. В силу этого уменьшается такая активация помощи при вождении, которая заставляет водителя испытывать беспокойство.
[0016] В качестве предпочтительной конфигурации узел получения времени торможения получает время торможения на основе относительной скорости между транспортным средством и объектом.
Согласно такой конфигурации, поскольку время торможения, на которое в основном оказывает влияние относительная скорость, получается на основе относительной скорости, надлежащее время торможения может получаться. Такое время торможения может выбираться из таблицы или карты, определенной в ассоциации с относительной скоростью, либо может вычисляться посредством применения относительной скорости к предварительно определенной функции.
[0017] В качестве предпочтительной конфигурации узел управления помощью регулирует период, в течение которого активация помощи при вождении сдерживается, на основе абсолютной величины для величины относительного зависимого от времени изменения, обнаруженной посредством узла обнаружения поперечного изменения.
Согласно такой конфигурации период, в течение которого сдерживается активация помощи при вождении, регулируется на основе величины поперечного относительного зависимого от времени изменения. В силу этого период подавления, в течение которого сдерживается помощь при вождении, регулируется надлежащим образом.
[0018] В качестве предпочтительной конфигурации период, в течение которого сдерживается активация помощи при вождении, регулируется таким образом, что он увеличивается по мере того, как становится больше абсолютная величина для величины относительного зависимого от времени изменения, обнаруженной посредством узла обнаружения поперечного изменения.
Согласно такой конфигурации, если величина поперечного относительного зависимого от времени изменения является большой, объект с большой вероятностью должен уходить с курса движения транспортного средства. Соответственно, если вероятность ухода с курса движения является высокой, период подавления продлевается, в силу этого позволяя уменьшать вероятность того, что активируется помощь при вождении, которая заставляет водителя испытывать беспокойство.
[0019] В качестве предпочтительной конфигурации транспортное средство включает в себя датчик скорости относительно вертикальной оси, который обнаруживает скорость, с которой изменяется угол поворота в направлении поворачивания транспортного средства, и узел обнаружения поперечного изменения корректирует обнаруженную величину относительного зависимого от времени изменения объекта на основе обнаруженной скорости, с которой изменяется угол поворота.
[0020] Согласно такой конфигурации величина поперечного относительного зависимого от времени изменения корректируется на основе такого направления движения (ориентации) транспортного средства, которое изменяется посредством операции руления и т.п. Посредством коррекции величины относительного зависимого от времени изменения посредством изменения направления движения транспортного средства может быть улучшен отклик для обнаружения величины поперечного относительного зависимого от времени изменения объекта. Например, по сравнению с датчиком, который измеряет состояние транспортного средства, эта величина относительного зависимого от времени изменения объекта, который обнаруживается на основе радара и т.п. с низким откликом, естественно, имеет низкий отклик. С учетом этого, посредством использования результата измерений датчика, имеющего быстрый отклик и измеряющего состояние транспортного средства, к примеру, датчика скорости относительно вертикальной оси, можно добиваться быстрого отклика величины относительного зависимого от времени изменения объекта.
[0021] В качестве предпочтительной конфигурации целевая область, которая представляет собой область, секционированную посредством траекторий перемещения правого и левого концов транспортного средства, в ассоциации с рулевым управлением транспортного средства в течение времени руления, присутствует впереди транспортного средства в направлении движения, и узел управления помощью заменяет время руления в качестве стандарта времени до столкновения на время, полученное согласно позиции, в которой объект входит в целевую область, в случае определения относительно сдерживания активации помощи при вождении.
[0022] Согласно такой конфигурации с учетом характеристики поворачиваемости транспортного средства, время руления, которое должно сравниваться со временем до столкновения, заменено временем, которое должно получаться согласно позиции, в которой объект входит в целевую область. Время, которое должно быть заменено, является наибольшим в центре по ширине транспортного средства транспортного средства и составляет, например, время руления. Время, которое должно быть заменено, становится меньше в направлении стороны от центра по ширине транспортного средства. Это обеспечивает возможность надлежащего задержания активации помощи при вождении, связанной с избеганием столкновения. Иными словами, транспортное средство имеет ширину, и с учетом характеристики поворачиваемости транспортного средства, избегание столкновения для объекта может выполняться даже в состоянии, в котором транспортное средство находится ближе к объекту в то время, когда объект находится в позиции, которая находится на большом расстоянии от центра по ширине транспортного средства, по сравнению со случаем, в котором объект находится в центре по ширине транспортного средства. Соответственно, активация помощи при вождении транспортного средства относительно объекта в позиции, которая находится на большом расстоянии от центра по ширине транспортного средства, может сдерживаться на основе относительной поперечной скорости даже в таком состоянии, в котором транспортное средство находится ближе к объекту, по сравнению с объектом в центре по ширине транспортного средства. В силу этого, может еще больше сдерживаться такая активация помощи при вождении, которая заставляет водителя испытывать беспокойство.
[0023] В качестве предпочтительной конфигурации относительное поперечное ускорение, которое представляет собой относительное ускорение в то время, когда объект движется в поперечном направлении относительно транспортного средства, используется вместе в качестве величины относительного зависимого от времени изменения, обнаруженной посредством узла обнаружения поперечного изменения.
[0024] Согласно такой конфигурации величина зависимого от времени изменения может обнаруживаться быстрее, так что определение относительно того, сдерживается или нет помощь при вождении, выполняется более целесообразно.
Краткое описание чертежей
[0025] Фиг. 1 является блок-схемой, иллюстрирующей схематичную конфигурацию первого варианта осуществления, который осуществляет устройство помощи при вождении.
Фиг. 2 является схематичным видом, схематично иллюстрирующим взаимосвязь между транспортным средством, содержащим устройство помощи при вождении, проиллюстрированное на фиг. 1, и движущимся впереди транспортным средством.
Фиг. 3 является видом сверху, иллюстрирующим пример, в котором устройство помощи при вождении, проиллюстрированное на фиг. 1, обнаруживает относительную поперечную скорость.
Фиг. 4 является видом сверху, иллюстрирующим пример, в котором устройство помощи при вождении, проиллюстрированное на фиг. 1, обнаруживает относительную поперечную скорость.
Фиг. 5 является графиком, иллюстрирующим область определения, состоящую из времени (TTC) до столкновения и относительной скорости (Vr), причем область определения используется в устройстве помощи при вождении, проиллюстрированном на фиг. 1.
Фиг. 6 является графиком, иллюстрирующим пример задания времени (T1), в которое можно избегать столкновения посредством руления в устройстве помощи при вождении, проиллюстрированном на фиг. 1.
Фиг. 7 является графиком, иллюстрирующим пороговое значение (TH1) активации, используемое для того, чтобы определять, активируется или нет помощь при вождении в устройстве помощи при вождении, проиллюстрированном на фиг. 1.
Фиг. 8 является схемой взаимосвязей, иллюстрирующей график, проиллюстрированный на фиг. 5, и взаимосвязь между транспортным средством и областью впереди транспортного средства в направлении его движения.
Фиг. 9 является схемой взаимосвязей, иллюстрирующей график, проиллюстрированный на фиг. 5, и взаимосвязь между транспортным средством и областью впереди транспортного средства в направлении его движения.
Фиг. 10 является видом, иллюстрирующим взаимосвязь между областью определения и областью впереди транспортного средства в направлении его движения на графике, проиллюстрированном на фиг. 5: фиг. 10(a) является схематичным видом, иллюстрирующим то, что позиция (P1), указывающая взаимосвязь между относительной скоростью и временем (TTC) до столкновения, размещена во второй области; и фиг. 10(b) является схематичным видом, иллюстрирующим соответствующие позиции для времени (Lb) торможения и времени (Ls) поворачивания впереди транспортного средства в направлении движения.
Фиг. 11 является блок-схемой, иллюстрирующей схематичную конфигурацию второго варианта осуществления, который осуществляет устройство помощи при вождении.
Фиг. 12 является видом, иллюстрирующим взаимосвязь между областью определения и областью впереди транспортного средства в направлении движения в устройстве помощи при вождении на фиг. 11: фиг. 12(a) является схематичным видом, иллюстрирующим взаимосвязь между относительной скоростью и временем (TTC) до столкновения; фиг. 12(b) является схематичным видом, иллюстрирующим область (At), которая располагается впереди транспортного средства в направлении движения и которая секционирована посредством траекторий перемещения правого и левого концов транспортного средства, в ассоциации с рулением в течение времени руления; и фиг. 12(c) является графиком, иллюстрирующим область, которая располагается впереди транспортного средства в направлении движения и которая секционирована посредством времени (T1) руления.
Фиг. 13 является схемой взаимосвязей, иллюстрирующей график, проиллюстрированный на фиг. 12, и взаимосвязь между транспортным средством и областью впереди транспортного средства в направлении его движения.
Фиг. 14 является схемой взаимосвязей, иллюстрирующей график, проиллюстрированный на фиг. 12, и взаимосвязь между транспортным средством и областью впереди транспортного средства в направлении его движения.
Фиг. 15 является списком, показывающим, в таблице, настройки абсолютной величины относительной поперечной скорости и продолжительности периода подавления в отношении третьего варианта осуществления, который осуществляет устройство помощи при вождении.
Фиг. 16 является списком, показывающим, в таблице, примеры относительной поперечной скорости, обнаруженной в устройстве помощи при вождении, соответствующем фиг. 15.
Фиг. 17 является схематичным видом, иллюстрирующим абсолютную величину поворачивания транспортного средства и позиционную взаимосвязь с объектом в отношении четвертого варианта осуществления, который осуществляет устройство помощи при вождении: фиг. 17(a) является схематичным видом, иллюстрирующим позиционную взаимосвязь, когда поворачивание транспортного средства является небольшим; и фиг. 17(b) является схематичным видом, иллюстрирующим позиционную взаимосвязь, когда поворачивание транспортного средства является большим.
Фиг. 18 является таблицей, показывающей случай установления пороговых значений, которые должны сравниваться с относительной поперечной скоростью согласно типу объекта, в отношении другого варианта осуществления, который осуществляет устройство помощи при вождении.
Фиг. 19 является таблицей, показывающей случай установления пороговых значений, которые должны сравниваться с относительной поперечной скоростью согласно расстоянию до объекта, в отношении еще одного другого варианта осуществления, который осуществляет устройство помощи при вождении.
ОПТИМАЛЬНЫЕ РЕЖИМЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0026] ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Первый вариант осуществления, который осуществляет устройство помощи при вождении и способ помощи при вождении, описывается со ссылкой на фиг. 1-10.
[0027] Как проиллюстрировано на фиг. 1, транспортное средство 10, к которому применяются устройство помощи при вождении и способ помощи при вождении, включает в себя узел 11 помощи при вождении, который предоставляет различные формы помощи при вождении для транспортного средства 10. Дополнительно, транспортное средство 10 включает в себя: HMI 12 (человеко-машинный интерфейс), который уведомляет водителя относительно содержимого помощи при вождении; и устройство 13 управления предупреждением столкновения, которое помогает в работе транспортного средства. Узел 11 помощи при вождении соединяется с HMI 12 и устройством 13 управления предупреждением столкновения, с тем чтобы иметь возможность передавать различную информацию в него.
[0028] Узел 11 помощи при вождении обнаруживает объект, к примеру, подвижное тело или стационарный объект в качестве цели, которую следует избегать в помощи в избегании столкновения, и активирует помощь в избегании столкновения для объекта, обнаруженного таким образом. Помощь в избегании столкновения представляет собой такую помощь при вождении, как система предаварийной безопасности (PCS), активированная в транспортном средстве 10 для того, чтобы избегать столкновения с объектом, например, и представляет собой помощь при вождении, связанную с избеганием столкновения. Примеры подвижного тела, обнаруженного посредством узла 11 помощи при вождении, включают в себя движущееся впереди транспортное средство 60, встречное транспортное средство и пешехода, и примеры стационарного объекта включают в себя паркующееся транспортное средство, опору ЛЭП и дорожное ограждение. Следует отметить, что в настоящем варианте осуществления, нижеприведенное описание связано с движущимся впереди транспортным средством 60 в качестве объекта для целей этого описания, но объект не ограничен движущимся впереди транспортным средством 60. Следует отметить, что активация помощи при вождении, связанной с избеганием столкновения, заключается в том, чтобы выводить сигнал с инструкцией предупреждения, который инструктирует помощь при вождении из узла 11 помощи при вождении в HMI 12, либо выводить сигнал управления предупреждением столкновения, который инструктирует помощь при вождении из узла 11 помощи при вождении в устройство 13 управления предупреждением столкновения. Дополнительно, активация помощи при вождении, связанной с избеганием столкновения, может быть известна из этой помощи при вождении, связанной с избеганием столкновения, которая выводится из HMI 12 или устройства 13 управления предупреждением столкновения.
[0029] Транспортное средство 10 включает в себя: узел 15 получения информации окружения транспортного средства, который получает информацию окружения транспортного средства в окрестности транспортного средства 10; и узел 18 получения информации касательно транспортного средства, который получает различную информацию транспортного средства 10 в качестве информации касательно транспортного средства. Узел 15 получения информации окружения транспортного средства и узел 18 получения информации касательно транспортного средства соединяются с узлом 11 помощи при вождении, с тем чтобы иметь возможность передавать различную информацию в него.
[0030] Узел 15 получения информации окружения транспортного средства предоставляется в транспортном средстве 10. Узел 15 получения информации окружения транспортного средства включает в себя: бортовую камеру 151, которая захватывает окружающую среду транспортного средства 10, включающую в себя движущееся впереди транспортное средство 60 и т.п.; и радар 152 диапазона миллиметровых волн, который обнаруживает объект, присутствующий в окрестности транспортного средства 10, включающий в себя движущееся впереди транспортное средство 60 и т.п. Дополнительно, узел 15 получения информации окружения транспортного средства включает в себя передающее устройство 153, имеющее функцию для того, чтобы выполнять радиосвязь с устройством связи и т.п. за пределами транспортного средства.
[0031] Бортовая камера 151 захватывает предварительно определенный диапазон впереди транспортного средства 10 посредством CCD-камеры и т.п., предоставленной на задней стороне зеркала заднего вида. Бортовая камера 151 выводит сигнал изображения на основе захваченного изображения, захваченного таким образом, в узел 11 помощи при вождении.
[0032] Радар 152 диапазона миллиметровых волн имеет, например, функцию измерения расстояния для того, чтобы измерять расстояние, например, расстояние L между транспортными средствами (см. фиг. 2), между транспортным средством 10 и движущимся впереди транспортным средством 60 в качестве объекта, присутствующего в направлении движения транспортного средства 10, и функцию измерения скорости для того, чтобы измерять относительную скорость Vr (см. фиг. 2) между движущимся впереди транспортным средством 60 и транспортным средством 10. Когда радар 152 диапазона миллиметровых волн обнаруживает движущееся впереди транспортное средство 60, присутствующее в направлении движения транспортного средства 10, радар 152 диапазона миллиметровых волн выводит, в узел 11 помощи при вождении, сигнал, включающий в себя информацию движущегося впереди транспортного средства 60, обнаруженного таким образом.
[0033] Передающее устройство 153 получает информацию, указывающую скорость и позицию других транспортных средств, например, через связь между транспортными средствами с другими транспортными средствами, включающими в себя движущееся впереди транспортное средство 60, присутствующее в окрестности транспортного средства 10. Передающее устройство 153 выводит информацию, полученную таким образом, в узел 11 помощи при вождении. Дополнительно, передающее устройство 153 выполняет связь между транспортным средством и дорожной инфраструктурой с помощью антенны оптического маяка, предоставленной в качестве придорожного инфраструктурного оборудования. Передающее устройство 153 получает сигнал информации инфраструктуры, связанный с придорожным инфраструктурным оборудованием и т.п., через связь между транспортным средством и дорожной инфраструктурой с помощью антенны оптического маяка. Когда передающее устройство 153 принимает сигнал информации инфраструктуры, передающее устройство 153 выводит сигнал информации инфраструктуры, принимаемый таким образом, в узел 11 помощи при вождении. Следует отметить, что сигнал информации инфраструктуры включает в себя, например, расстояние до перекрестка, цикл сигнала светофора, предусмотренного на перекрестке, и форму дороги и состояние движения на дороге, содержащей антенну оптического маяка (включающее в себя форму перекрестка, кривизну, градиент и число полос движения). Кроме того, сигнал информации инфраструктуры включает в себя сопутствующую информацию, связанную с дорогой, и информацию подвижного тела, такую как другие транспортные средства в окрестности перекрестка, обнаруженные посредством наземного инфраструктурного оборудования, и т.п.
[0034] Иными словами, информация окружения транспортного средства, выводимая из узла 15 получения информации окружения транспортного средства, включает в себя различную информацию, включающую в себя информацию, на основе которой может различаться тип объекта.
Узел 18 получения информации касательно транспортного средства предоставляется в транспортном средстве 10. Узел 18 получения информации касательно транспортного средства включает в себя датчик 181 скорости, датчик 182 ускорения, датчик 183 скорости относительно вертикальной оси, датчик 184 акселератора, датчик 185 торможения и датчик 186 рулевого управления.
[0035] Датчик 181 скорости обнаруживает скорость вращения колесного узла транспортного средства 10 и выводит сигнал, соответствующий скорости вращения, обнаруженной таким образом, в узел 11 помощи при вождении.
Датчик 182 ускорения обнаруживает ускорение транспортного средства 10 и выводит сигнал, соответствующий ускорению, обнаруженному таким образом, в узел 11 помощи при вождении.
[0036] Датчик 183 скорости относительно вертикальной оси обнаруживает скорость, с которой изменяется угол поворота транспортного средства 10 в направлении поворачивания, и выводит сигнал, соответствующий скорости относительно вертикальной оси, обнаруженной таким образом, в узел 11 помощи при вождении.
Датчик 184 акселератора обнаруживает, нажимает или нет водитель педаль акселератора, и обнаруживает величину нажатия педали. Дополнительно, датчик 184 акселератора выводит, в узел 11 помощи при вождении, сигнал, соответствующий тому, выполняет или нет водитель нажатие, и сигнал, соответствующий величине нажатия, обнаруженной таким образом.
[0037] Датчик 185 торможения обнаруживает, нажимает или нет водитель педаль тормоза, и обнаруживает величину нажатия педали. Дополнительно, датчик 185 торможения выводит, в узел 11 помощи при вождении, сигнал, соответствующий тому, выполняет или нет водитель нажатие, и сигнал, соответствующий величине нажатия, обнаруженной таким образом.
[0038] Датчик 186 рулевого управления обнаруживает рабочую величину (угол поворота при рулении) руления водителем и выводит сигнал, соответствующий рабочей величине (углу поворота при рулении), обнаруженной таким образом, в узел 11 помощи при вождении.
HMI 12 представляет собой устройство, которое выводит изображение или аудио, распознаваемое водителем. Изображение может включать в себя по меньшей мере одно из статического изображения и движущегося изображения, а аудио может включать в себя по меньшей мере одно из простого звука, к примеру, аварийного тонального сигнала, и аудиоинструкции. HMI 12 включает в себя по меньшей мере одно из аудиостанции, монитора навигационной системы, приборной панели, дисплея на лобовом стекле и т.п. Дополнительно, HMI 12 может состоять только из экрана, только из динамика или только из зуммера. Когда сигнал с инструкцией предупреждения вводится в HMI 12 из узла 11 помощи при вождении, содержимое, соответствующий такому введенному сигналу с инструкцией предупреждения, выводится в качестве информации, распознаваемой водителем. HMI 12 выполняет помощь водителю, к примеру, управление замедлением или управление рулением, посредством вывода информации, распознаваемой водителем, который выполняет такое управление на основе сигнала с инструкцией предупреждения.
[0039] Управление замедлением включает в себя уведомление посредством звука или отображения касательно того, что расстояние L между транспортными средствами становится коротким, либо что присутствует человек впереди транспортного средства в направлении движения. Управление рулением включает в себя уведомление в форме предупреждения о выезде за пределы полосы движения посредством звука или отображения.
[0040] Устройство 13 управления предупреждением столкновения представляет собой устройство, которое выполняет усиление (помощь) в отношении одного или более из торможения, руления и т.п. для транспортного средства 10. Когда сигнал управления предупреждением столкновения вводится из узла 11 помощи при вождении, устройство 13 управления предупреждением столкновения помогает торможению, рулению и т.п. на основе такого введенного сигнала управления предупреждением столкновения. Устройство 13 управления предупреждением столкновения состоит из различных управляющих устройств, таких как устройство управления тормозом, которое управляет актуатором тормоза транспортного средства 10, устройство управления двигателем, которое управляет двигателем, устройство управления рулением, которое управляет актуатором рулевого управления, и аналогичных устройств.
[0041] Иными словами, устройство 13 управления предупреждением столкновения выполняет управление замедлением и управление рулением на основе сигнала управления предупреждением, введенного из узла 11 помощи при вождении.
Примеры управления замедлением включают в себя сдерживание частоты вращения двигателя, прекращение (отсечку топлива) подачи топлива в двигатель, управление для усиления при торможении и управление торможением за счет системы предаварийной безопасности. Например, скорость транспортного средства 10 может уменьшаться посредством управления устройством управления тормозом и т.п. Посредством такого управления замедлением обеспечивается расстояние между транспортными средствами и поддерживается надлежащая скорость.
[0042] Примеры управления рулением включают в себя систему помощи для удержания на полосе движения (LKA), чтобы не допускать отклонения транспортного средства 10 от распознанной полосы движения и т.п. Посредством такого управления рулением выполняется предупреждение о выезде за пределы полосы движения посредством небольшого усилия для поворота при рулении в течение короткого времени, удержание на полосе движения посредством непрерывного небольшого усилия для поворота при рулении и т.п.
[0043] Далее описывается узел 11 помощи при вождении.
Узел 11 помощи при вождении выполняет помощь в избегании столкновения в качестве помощи при вождении, связанной с избеганием столкновения относительно объекта в качестве цели, которую следует избегать посредством транспортного средства 10. Узел 11 помощи при вождении включает в себя: узел 14 указания объектов, который указывает объект в качестве цели, которую следует избегать; узел 20 вычисления относительной информации, который вычисляет относительную информацию между транспортным средством 10 и движущимся впереди транспортным средством 60; и узел 30 вычисления времени до столкновения, который вычисляет время Ta до столкновения, используемое для помощи в избегании столкновения. Дополнительно, узел 11 помощи при вождении включает в себя: узел 40 хранения, служащий в качестве первого узла хранения и второго узла хранения, которые сохраняют различную информацию, используемую для помощи в избегании столкновения и т.п.; и узел 50 управления помощью, который определяет, выполняется или нет помощь в избегании столкновения.
[0044] Узел 11 помощи при вождении включает в себя микрокомпьютер, имеющий арифметический модуль (CPU) и энергонезависимое или энергозависимое устройство хранения данных, к примеру, ROM или RAM. Энергонезависимое устройство хранения данных узла 11 помощи при вождении сохраняет управляющие программы для выполнения различных процессов и различных параметров, используемых для различных процессов. Арифметический модуль выполняет управляющие программы, сохраненные в устройстве хранения данных, по мере необходимости, и обращается к различным параметрам по мере необходимости во время выполнения управляющих программ. Следует отметить, что в настоящем варианте осуществления, управляющие программы включают в себя программу для того, чтобы указывать объект, программу для того, чтобы вычислять относительную информацию, программу для того, чтобы вычислять время до столкновения, и программу для того, чтобы определять, активируется или нет помощь в избегании столкновения. Следует отметить, что эти программы могут сохраняться в узле 11 помощи при вождении в качестве отдельных программ, так что они выполняются независимо. Дополнительно, различные параметры включают в себя различные параметры, используемые для указания объекта, вычисления относительной информации, вычисления времени до столкновения и определения относительно того, выполняется или нет помощь в избегании столкновения.
[0045] Иными словами, в узле 11 помощи при вождении, посредством выполнения управляющих программ, выполняются функция узла 14 указания объектов, функция узла 20 вычисления относительной информации, функция узла 30 вычисления времени до столкновения и функция узла 50 управления помощью.
[0046] Узел 14 указания объектов обнаруживает объекты, включающие в себя объекты, включающие в себя движущееся впереди транспортное средство 60, присутствующее в направлении движения транспортного средства 10, на основе информации окружения транспортного средства, вводимой из узла 15 получения информации окружения транспортного средства. Затем узел 14 указания объектов указывает движущееся впереди транспортное средство 60 в качестве цели, которую следует избегать, в помощи в избегании столкновения, из числа объектов, обнаруженных таким образом.
[0047] Узел 20 вычисления относительной информации вычисляет относительную информацию между транспортным средством 10 и движущимся впереди транспортным средством 60, присутствующим впереди транспортного средства 10 в направлении движения. Узел 20 вычисления относительной информации вычисляет расстояние L между транспортными средствами между транспортным средством 10 и движущимся впереди транспортным средством 60 на основе информации окружения транспортного средства, вводимой из узла 15 получения информации окружения транспортного средства, и выводит расстояние L между транспортными средствами, вычисленное таким образом, в узел 30 вычисления времени до столкновения и узел 50 управления помощью. Дополнительно, узел 20 вычисления относительной информации включает в себя: узел 21 вычисления скорости, который вычисляет относительную скорость Vr, которая представляет собой относительную информацию между транспортным средством 10 и движущимся впереди транспортным средством 60; узел 22 вычисления времени торможения, служащий в качестве узла получения времени торможения, который вычисляет время Tb торможения; и узел 23 вычисления величины поперечного изменения, служащий в качестве узла обнаружения поперечного изменения, который вычисляет относительную поперечную скорость Vy, которая представляет собой относительную скорость движения. Узел 20 вычисления относительной информации выводит относительную скорость Vr, время Tb торможения и относительную поперечную скорость Vy, вычисленные таким образом, в узел 30 вычисления времени до столкновения и узел 50 управления помощью.
[0048] Узел 21 вычисления скорости может получать или вычислять относительную скорость Vr на основе информации окружения транспортного средства, вводимой из узла 15 получения информации окружения транспортного средства.
Как проиллюстрировано на фиг. 2, узел 21 вычисления скорости может получать скорость V1 транспортного средства 10 из узла 18 получения информации касательно транспортного средства и получать скорость V2 движущегося впереди транспортного средства 60 из узла 15 получения информации окружения транспортного средства, с тем чтобы вычислять относительную скорость Vr (=|V1-V2|) из разности между скоростью V1 и скоростью V2, полученными таким образом.
[0049] Узел 22 вычисления времени торможения вычисляет время Tb торможения, соответствующее относительной скорости Vr между транспортным средством 10 и движущимся впереди транспортным средством 60. Время Tb торможения является значением, которое может вычисляться на основе характеристики, связанной с торможением транспортного средства 10, и относительной скорости Vr, и является нижним пределом времени, за которое среднестатистический водитель транспортного средства 10 может избегать столкновения между транспортным средством 10 и движущимся впереди транспортным средством 60 посредством торможения. Время Tb торможения варьируется в зависимости от относительной скорости Vr. Соответственно, в распределении дискретизированных данных множества времен торможения, полученных согласно относительной скорости Vr, короткое время торможения выбирается согласно относительной скорости Vr. Следует отметить, что время Tb торможения может вычисляться посредством различных вычислений, к примеру, вычисления для того, чтобы вычислять время Tb торможения с учетом относительного ускорения, либо может получаться на основе опыта, экспериментальных данных, моделирования и т.п. Следует отметить, что время Tb торможения может выбираться из таблицы или карты, определенной в ассоциации с относительной скоростью Vr, или может вычисляться посредством применения относительной скорости Vr к предварительно определенной функции.
[0050] Узел 23 вычисления величины поперечного изменения вычисляет относительную поперечную скорость Vy между транспортным средством 10 и движущимся впереди транспортным средством 60 (этап обнаружения поперечного изменения). Относительная поперечная скорость Vy представляет собой относительную скорость в поперечном направлении, перпендикулярном направлению движения транспортного средства 10. Например, когда только транспортное средство 10 изменяет (поворачивает) направление движения, относительная поперечная скорость Vy получается на основе компонента поперечной скорости из скорости транспортного средства 10.
[0051] Как проиллюстрировано на фиг. 3, когда только движущееся впереди транспортное средство 60 изменяет направление движения, относительная поперечная скорость Vy получается на основе компонента V2y поперечной скорости из компонента V2x скорости в направлении движения транспортного средства 10 и компонента V2y поперечной скорости, оба из которых составляют скорость V2 движущегося впереди транспортного средства 60.
[0052] Как проиллюстрировано на фиг. 4, когда транспортное средство 10 движется по искривленной дороге, например, узел 23 вычисления величины поперечного изменения также может вычислять относительную поперечную скорость Vy между транспортным средством 10 и дорожным ограждением 61. Когда транспортное средство 10 движется по искривленной дороге, скорость V1 транспортного средства 10 состоит из компонента V1x скорости к передней стороне транспортного средства и компонента V1y скорости к поперечному направлению, перпендикулярному передней стороне транспортного средства. Иными словами, на основе транспортного средства 10, дорожное ограждение 61 в качестве стационарного объекта перемещается в обратном направлении в компоненте V1y скорости транспортного средства 10 в поперечном направлении. Иными словами, относительная поперечная скорость Vy между транспортным средством 10 и дорожным ограждением 61 получается на основе компонента V1y скорости транспортного средства 10 в поперечном направлении.
[0053] Как проиллюстрировано на фиг. 1, относительная информация между транспортным средством 10 и движущимся впереди транспортным средством 60 вводится в узел 30 вычисления времени до столкновения из узла 20 вычисления относительной информации. Узел 30 вычисления времени до столкновения включает в себя узел 31 вычисления TTC, который вычисляет время Ta до столкновения, т.е. так называемое TTC (время до столкновения). Время Ta до столкновения является временем, которое пройдет до столкновения транспортного средства 10 с движущимся впереди транспортным средством 60. Узел 30 вычисления времени до столкновения выводит время (TTC) Ta до столкновения, вычисленное таким образом, в узел 50 управления помощью.
[0054] Как проиллюстрировано на фиг. 2, узел 31 вычисления TTC вычисляет время Ta до столкновения транспортного средства 10 относительно движущегося впереди транспортного средства 60. Узел 31 вычисления TTC получает расстояние L между транспортными средствами и относительную скорость Vr между транспортным средством 10 и движущимся впереди транспортным средством 60 из узла 20 вычисления относительной информации. Затем время (TTC) Ta до столкновения вычисляется согласно формуле (1) следующим образом.
TTC=L/Vr (1)
Следует отметить, что способ вычисления времени (TTC) до столкновения не ограничен формулой (1) и, если получается надлежащее время до столкновения, могут использоваться другие способы, включающие в себя способ с учетом относительного ускорения.
[0055] Как проиллюстрировано на фиг. 1, узел 40 хранения сохраняет время T1 руления, которое является временем, необходимым для того, чтобы избегать столкновения посредством поворачивания посредством руления, период 41 подавления, который представляет собой период для того, чтобы сдерживать помощь в избегании столкновения, и пороговое значение TH1 активации в качестве порогового значения, используемого для того, чтобы определять, сдерживается или нет помощь в избегании столкновения.
[0056] Как проиллюстрировано на фиг. 5, время T1 руления является постоянным временем независимо от значения относительной скорости Vr и задается равным нижнему пределу времени, за которое среднестатистический водитель может избегать столкновения посредством руления, т.е. времени, которое позволяет достигать избегания посредством общего руления.
[0057] Как проиллюстрировано на фиг. 6, в качестве времени T1 руления, короткое время руления выбирается в распределении дискретизированных данных множества времен руления, но время T1 руления может быть временем, вычисленным посредством различных вычислений, или временем, полученным на основе опыта, экспериментальных данных, моделирования и т.п.
[0058] Период 41 подавления, например, представляет собой период, в течение которого активация помощи в избегании столкновения сдерживается (временно прекращается), и задается равной такому времени, как рабочий цикл в 1-10 раз. Период 41 подавления может представлять собой период, вычисленный посредством различных вычислений, или период, полученный на основе опыта, экспериментальных данных, моделирования и т.п.
[0059] Как проиллюстрировано на фиг. 7, пороговое значение TH1 активации является пороговым значением, которое должно сравниваться с относительной поперечной скоростью Vy в то время, когда определяется, сдерживается или нет помощь в избегании столкновения. Пороговое значение TH1 активации может быть любым пороговым значением при условии, что можно оценивать то, что руление выполняется в такой степени, что столкновение между транспортным средством 10 и движущимся впереди транспортным средством 60 может сдерживаться. Пороговое значение TH1 активации может быть пороговым значением, вычисленным посредством различных вычислений, или пороговым значением, полученным на основе опыта, экспериментальных данных, моделирования и т.п. В узле 11 помощи при вождении, когда относительная поперечная скорость Vy составляет пороговое значение TH1 активации или больше, определяется то, что помощь в избегании столкновения сдерживается, но когда относительная поперечная скорость Vy меньше порогового значения TH1 активации, определяется то, что помощь в избегании столкновения не сдерживается.
[0060] Как проиллюстрировано на фиг. 1, узел 50 управления помощью определяет, выполняется или нет помощь в избегании столкновения, на основе времени Ta до столкновения и относительной скорости Vr (этап управления помощью). Узел 50 управления помощью включает в себя: узел 51 оценки, который определяет, активируется или нет помощь в избегании столкновения; и узел 52 регулирования, который определяет, сдерживается или нет активация помощи в избегании столкновения.
[0061] Как проиллюстрировано на фиг. 5, в узле 51 оценки, двумерная область, в которой время (TTC) до столкновения рассматривается в качестве вертикальной оси, а относительная скорость Vr рассматривается в качестве горизонтальной оси, устанавливается в качестве области определения. В области определения, установленной таким образом в узле 51 оценки, дополнительно устанавливаются область, в которой помощь в избегании столкновения активируется, область, в которой помощь в избегании столкновения не активируется, и аналогичные области. В области определения, граничная линия Lb торможения предоставляется на основе времени Tb торможения, определенного согласно относительной скорости Vr между транспортным средством 10 и движущимся впереди транспортным средством 60. Граничная линия Lb торможения является линией, выражаемой посредством формулы (2) следующим образом, и показана как линия, возрастающая к верхней правой стороне с начала координат в области определения. Следует отметить, что α в формуле (2), описанной ниже, является значением, определенным на основе тормозной характеристики транспортного средства. В области определения, граничная линия Ls руления предоставляется на основе времени T1 руления, определенного независимо от относительной скорости Vr между транспортным средством 10 и движущимся впереди транспортным средством 60. Граничная линия Ls руления является линией, выражаемой посредством формулы (3) следующим образом, и в области определения, граничная линия Ls руления показана как линия, в которой время (TTC) до столкновения принимает постоянное значение, т.е. как линия, перпендикулярная вертикальной оси.
TTC=α·Vr (2)
TTC=T1 (3)
Следует отметить, что способы вычисления граничной линии Lb торможения и граничной линии Ls руления не ограничены формулой (2) и формулой (3), описанными выше, при условии, что показаны надлежащее время торможения и надлежащее время руления для каждой относительной скорости Vr. Иными словами, граничная линия Lb торможения и граничная линия Ls руления могут сохраняться в узле 40 хранения заранее в качестве данных, таких как карты.
[0062] Как проиллюстрировано на фиг. 5, когда относительная скорость Vr представляет собой скорость R1 на граничной линии Lb торможения, время Tb торможения на граничной линии Lb торможения и время T1 руления на граничной линии Ls руления являются идентичным временем, так что граничная линия Lb торможения пересекается с граничной линией Ls руления. Соответственно, область определения секционирована на четыре области посредством граничной линии Lb торможения и граничной линии Ls руления. Более конкретно, область определения секционирована на первую область A1, в которой время (TTC) до столкновения не меньше граничной линии Lb торможения, но не больше граничной линии Ls руления, и вторую область A2, в которой время (TTC) до столкновения меньше граничной линии Lb торможения, но не меньше граничной линии Ls руления. Дополнительно, область определения секционирована на третью область A3, в которой время (TTC) до столкновения не меньше граничной линии Lb торможения, но меньше граничной линии Ls руления, и четвертую область A4, в которой время (TTC) до столкновения меньше граничной линии Lb торможения и меньше граничной линии Ls руления.
[0063] Первая область A1 представляет собой область, в которой столкновения транспортного средства 10 с движущимся впереди транспортным средством 60 можно избегать посредством торможения или руления, и область, в которой помощь в избегании столкновения является необязательной.
Вторая область A2 представляет собой область, в которой затруднительно избегать столкновения транспортного средства 10 с движущимся впереди транспортным средством 60 посредством торможения, но можно избегать посредством руления, и представляет собой область, которая требует помощи в избегании столкновения в случае, если по меньшей мере операция руления не выполняется.
[0064] Третья область A3 представляет собой область, в которой можно избегать столкновения транспортного средства 10 с движущимся впереди транспортным средством 60 посредством торможения, но его затруднительно избегать посредством руления, и представляет собой область, в которой помощь в избегании столкновения не может выполняться, поскольку относительная скорость является небольшой, или можно избегать столкновения посредством торможения.
[0065] Четвертая область A4 представляет собой область, в которой затруднительно избегать столкновения транспортного средства 10 с движущимся впереди транспортным средством 60 посредством торможения и руления, и область, в которой помощь в избегании столкновения необходима. Четвертая область A4 дополнительно секционирована посредством линии Le предостережения, указывающей время T2 предостережения, которое меньше времени T1 руления. В области, в которой время (TTC) до столкновения не меньше линии Le предостережения, формируется область A41 незначительной помощи, в которой выполняется слабая помощь в избегании столкновения. Дополнительно, в области, в которой время (TTC) до столкновения меньше линии Le предостережения, формируется область A42 значительной помощи, в которой выполняется сильная помощь в избегании столкновения. Когда взаимосвязь между временем Ta до столкновения и относительной скоростью Vr попадает в пределы области A41 незначительной помощи или в пределы области A42 значительной помощи, узел 11 помощи при вождении выполняет помощь в избегании столкновения для транспортного средства 10 без сдерживания. Например, в области A41 незначительной помощи, предупреждение выдается через HMI 12, либо выполняется управление помощью в торможении для того, чтобы увеличивать тормозную мощность. В области A42 значительной помощи предупреждение выдается через HMI 12, и управление замедлением, управление рулением и т.п. выполняется через устройство 13 управления предупреждением столкновения.
[0066] Фиг. 8 иллюстрирует позицию, соответствующую времени Tb торможения, и позицию, соответствующую времени T1 руления, обе из которых заданы впереди транспортного средства 10 в направлении движения, в то время, когда относительная скорость Vr не меньше скорости R1.
Как проиллюстрировано на фиг. 8, когда относительная скорость Vr не меньше скорости R1, во-первых, время T1 руления, т.е. позиция, соответствующая граничной линии Ls руления, задается впереди транспортного средства 10 в направлении движения, и область As, в которой избегание столкновения посредством руления является затруднительным, задается между транспортным средством 10 и граничной линией Ls руления. Дополнительно, время Tb торможения, т.е. позиция, соответствующая граничной линии Lb торможения, задается на передней стороне относительно позиции, соответствующей граничной линии Ls руления, впереди транспортного средства 10 в направлении его движения и область Ab, в которой избегание столкновения посредством торможения является затруднительным, задается между транспортным средством 10 и граничной линией Lb торможения. Таким образом, когда относительная скорость Vr не меньше скорости R1, область As соответствует четвертой области A4, и область Ab соответствует второй области A2.
[0067] Фиг. 9 иллюстрирует позицию, соответствующую времени Tb торможения, и позицию, соответствующую времени T1 руления, обе из которых заданы впереди транспортного средства 10 в направлении движения, в то время, когда относительная скорость Vr меньше скорости R1.
Как проиллюстрировано на фиг. 9, когда относительная скорость Vr меньше скорости R1, во-первых, время Tb торможения, т.е. позиция, соответствующая граничной линии Lb торможения, задается впереди транспортного средства 10 в направлении движения, и область Ab, в которой избегание столкновения посредством торможения является затруднительным, задается между транспортным средством 10 и граничной линией Lb торможения. Дополнительно, время T1 руления, т.е. позиция, соответствующая граничной линии Ls руления, задается на передней стороне относительно позиции, соответствующей граничной линии Lb торможения, впереди транспортного средства 10 в направлении движения, и область As, в которой избегание столкновения посредством руления является затруднительным, задается между транспортным средством 10 и граничной линией Ls руления. Таким образом, когда относительная скорость Vr меньше скорости R1, область Ab соответствует четвертой области A4 и область As соответствует третьей области A3.
[0068] Узел 51 оценки указывает позицию P1 определения в области определения на основе текущего времени Ta до столкновения и текущей относительной скорости Vr. Когда позиция P1 определения находится в первой области A1 или в третьей области A3, узел 51 оценки определяет то, что "помощь в избегании столкновения не активируется". Дополнительно, когда позиция P1 определения находится в четвертой области A4, узел 51 оценки определяет то, что "помощь в избегании столкновения активируется". В это время, когда позиция P1 определения находится в области A41 незначительной помощи, узел 51 оценки определяет то, что выполняется слабая помощь в избегании столкновения, а когда позиция P1 определения находится в области A42 значительной помощи, узел 51 оценки определяет то, что выполняется сильная помощь в избегании столкновения. Между тем, когда позиция P1 определения находится во второй области A2, узел 51 оценки определяет то, что "устанавливается условие для того, чтобы активировать помощь в избегании столкновения", а также определяет то, что позиция P1 определения находится во второй области A2. Затем узел 51 оценки выводит результат определения в узел 52 регулирования.
[0069] Когда результат определения, вводимый из узла 51 оценки, заключается в том, что "помощь в избегании столкновения не активируется", узел 52 регулирования не выполняет помощь в избегании столкновения. Другими словами, поскольку необходимость помощи в избегании столкновения определяется надлежащим образом, когда вероятность столкновения (угроза столкновения) является низкой, помощь в избегании столкновения не выполняется.
[0070] Когда результат определения, вводимый из узла 51 оценки, заключается в том, что "помощь в избегании столкновения активируется", узел 52 регулирования выполняет помощь в избегании столкновения. Иными словами, узел 52 регулирования выводит сигнал с инструкцией предупреждения в HMI 12 по мере необходимости и выводит сигнал управления предупреждением столкновения в устройство 13 управления предупреждением столкновения. Другими словами, поскольку необходимость помощи в избегании столкновения определяется надлежащим образом, когда вероятность столкновения является высокой, выполняется помощь в избегании столкновения.
[0071] Когда результат определения, вводимый из узла 51 оценки, заключается в том, что "устанавливается условие для того, чтобы активировать помощь в избегании столкновения", узел 52 регулирования определяет, сдерживается или нет помощь в избегании столкновения, на основе сравнения относительной поперечной скорости Vy между транспортным средством 10 и движущимся впереди транспортным средством 60 с пороговым значением TH1 активации (см. фиг. 7).
[0072] Когда относительная поперечная скорость Vy меньше порогового значения TH1 активации, вероятность столкновения является высокой, так что узел 52 регулирования определяет то, что помощь в избегании столкновения не сдерживается, и активирует помощь в избегании столкновения. В это время, узел 52 регулирования выполняет слабую помощь в избегании столкновения. Иными словами, узел 52 регулирования выводит сигнал с инструкцией предупреждения в HMI 12 по мере необходимости и выводит сигнал управления предупреждением столкновения в устройство 13 управления предупреждением столкновения. Другими словами, необходимость помощи в избегании столкновения определяется надлежащим образом, и когда вероятность столкновения является высокой, выполняется помощь в избегании столкновения.
[0073] Между тем, когда относительная поперечная скорость Vy не меньше порогового значения TH1 активации, вероятность столкновения временно понижается, так что узел 52 регулирования определяет то, что помощь в избегании столкновения сдерживается. Затем, независимо от результата определения узла 51 оценки, узел 52 регулирования не активирует помощь в избегании столкновения в течение периода, который задается в качестве периода 41 подавления. Иными словами, активация помощи в избегании столкновения сдерживается, сигнал с инструкцией предупреждения не выводится в HMI 12, и сигнал управления предупреждением столкновения не выводится в устройство 13 управления предупреждением столкновения. Другими словами, необходимость помощи в избегании столкновения определяется надлежащим образом, и когда вероятность столкновения является низкой, помощь в избегании столкновения не выполняется.
[0074] Таким образом, посредством использования относительной поперечной скорости Vy для определения относительно того, сдерживается или нет активация помощи в избегании столкновения, даже если руление не выполняется в транспортном средстве 10, необходимость помощи в избегании столкновения определяется надлежащим образом. Например, как проиллюстрировано на фиг. 3, узел 52 регулирования может определять, необходимо или нет сдерживать помощь в избегании столкновения, на основе относительной поперечной скорости Vy, полученной из компонента V2y поперечной скорости, вызываемого посредством поворачивания посредством движущегося впереди транспортного средства 60 посредством руления. Дополнительно, даже если руление выполняется в транспортном средстве 10, как проиллюстрировано на фиг. 4, транспортное средство 10 с большой вероятностью приближается к дорожному ограждению 61, и время (TTC) до столкновения может легко сокращаться. В это время, узел 52 регулирования определяет, является вероятность столкновения с дорожным ограждением 61 высокой или низкой, на основе относительной поперечной скорости Vy между транспортным средством 10 и дорожным ограждением 61, и определяет, необходимо или нет сдерживать помощь в избегании столкновения.
[0075] Далее подробнее описывается работа узла 11 помощи при вождении в случае, если позиция P1 определения находится во второй области A2 - области определения.
Как проиллюстрировано на фиг. 10(a), когда позиция P1 определения находится во второй области A2 - области определения, для транспортного средства 10 затруднительно избегать столкновения с движущимся впереди транспортным средством 60 посредством торможения, но транспортное средство 10 может избегать столкновения посредством руления. Соответственно, в случае, если операция руления не выполняется, транспортное средство 10, в котором позиция P1 определения находится во второй области A2, с большой вероятностью должно сталкиваться с движущимся впереди транспортным средством 60, но в случае, если операция руления выполняется, маловероятно, что транспортное средство 10 должно сталкиваться с движущимся впереди транспортным средством 60. Таким образом, даже если позиция P1 определения находится во второй области A2, вероятность столкновения с движущимся впереди транспортным средством 60 может становиться высокой или низкой в зависимости от рабочего режима транспортного средства 10.
[0076] Иными словами, в случае, если позиция P1 определения находится во второй области A2, когда необходимая величина операции руления для того, чтобы избегать столкновения, не выполняется, транспортное средство 10, с большой вероятностью должно сталкиваться с движущимся впереди транспортным средством 60. Соответственно, целесообразно, чтобы узел 11 помощи при вождении активировал помощь в избегании столкновения. Такая надлежащая помощь при вождении может обеспечивать преимущества избегания столкновения и уменьшения повреждений, и маловероятно, что она вызовет некомфортное ощущение у водителя.
[0077] Между тем, в случае, если позиция P1 определения находится во второй области A2, когда необходимая величина операции руления для того, чтобы избегать столкновения, выполняется, маловероятно, что транспортное средство 10 должно сталкиваться с движущимся впереди транспортным средством 60. Соответственно, может быть нецелесообразным, чтобы узел 11 помощи при вождении активировал помощь в избегании столкновения. Такая нецелесообразная помощь в избегании столкновения может заставлять водителя испытывать беспокойство или может вызывать некомфортное ощущение у водителя.
[0078] Соответственно, в случае, если позиция P1 определения находится во второй области A2, необходимо определять, представляет собой операция вождения, выполняемая в транспортном средстве 10, руление или нет. В случае, если руление выполняется в транспортном средстве 10, можно определять, является или нет величина руления величиной, требуемой посредством избегания столкновения, на основе информации касательно транспортного средства и т.п., полученной из датчика 186 рулевого управления.
[0079] Между тем, если движущееся впереди транспортное средство 60 поворачивает посредством руления, получается преимущество, идентичное преимуществу в случае, в котором поворачивает транспортное средство 10. Иными словами, столкновение между транспортным средством 10 и движущимся впереди транспортным средством 60 избегается даже в случае, если движущееся впереди транспортное средство 60 движется в направлении от полосы движения или дороги, по которой движется транспортное средство 10. Иными словами, желательно иметь возможность определять надлежащим образом, представляет собой или нет поворачивание движущегося впереди транспортного средства 60 поворачивание, необходимое для того, чтобы избегать столкновения.
[0080] С учетом этого, в настоящем варианте осуществления, определяется, выполняется или нет поворачивание, которое позволяет избегать столкновения между транспортным средством 10 и движущимся впереди транспортным средством 60, посредством использования относительной поперечной скорости Vy между транспортным средством 10 и движущимся впереди транспортным средством 60. В силу этого, независимо от того, поворачивает транспортное средство 10 или поворачивает движущееся впереди транспортное средство 60, т.е. независимо от того, выполняет руление транспортное средство 10 либо выполняет руление движущееся впереди транспортное средство 60, надлежащим образом определяется, выполняется или нет поворачивание для того, чтобы избегать столкновения между транспортным средством 10 и движущимся впереди транспортным средством 60.
[0081] Если относительная поперечная скорость Vy является небольшой, оценивается то, что движущееся впереди транспортное средство 60 не уходит с направления (курса) движения транспортного средства 10 и, если относительная поперечная скорость Vy является большой, оценивается то, что движущееся впереди транспортное средство 60 уходит с направления (курса) движения транспортного средства 10. Иными словами, если движущееся впереди транспортное средство 60 уходит с направления движения транспортного средства 10, вероятность столкновения является низкой, но если движущееся впереди транспортное средство 60 не уходит с направления движения транспортного средства 10, вероятность столкновения является высокой.
[0082] Дополнительно, эта относительная поперечная скорость Vy между транспортным средством 10 и движущимся впереди транспортным средством 60, движущимся по идентичной дороге, на которую оказывает влияние форма дороги, попадает в предварительно определенный диапазон, но в случае, если сменяется полоса движения, относительная поперечная скорость Vy имеет тенденцию быть большой. С учетом этого, пороговое значение TH1 активации может задаваться таким образом, чтобы иметь возможность отличать изменение вследствие формы дороги, к примеру, кривизны, от изменения вследствие смены полосы движения, надлежащим образом.
[0083] Соответственно, узел 11 помощи при вождении может более целесообразно управлять необходимостью помощи в избегании столкновения и эффективно сдерживать необязательную активацию помощи при вождении.
Как описано выше, согласно устройству помощи при вождении настоящего варианта осуществления, можно обеспечивать следующие преимущества.
[0084] (1) На основе относительной поперечной скорости Vy движущегося впереди транспортного средства 60 определяется, сдерживается или нет активация помощи в избегании столкновения. В случае помощи в избегании столкновения, если относительная позиция движущегося впереди транспортного средства 60 в отношении транспортного средства 10 поперечно уходит с направления движения транспортного средства, вероятность столкновения между транспортным средством 10 и движущимся впереди транспортным средством 60, является низкой, так что необходимость активировать помощь в избегании столкновения является низкой. С учетом этого, относительная поперечная скорость Vy движущегося впереди транспортного средства 60 сравнивается с пороговым значением TH1 активации и, когда относительная поперечная скорость Vy движущегося впереди транспортного средства 60 превышает пороговое значение TH1 активации и вероятность столкновения является низкой, активация помощи в избегании столкновения сдерживается. В силу этого, в случае, если водитель считает, что помощь является необязательной, например, в случае, если водитель выполняет операцию избегания посредством руления или движущееся впереди транспортное средство 60 сменяет полосу движения, активация помощи в избегании столкновения сдерживается, за счет этого уменьшая вероятность того, что водитель испытывает беспокойство.
[0085] (2) Когда относительная поперечная скорость Vy используется для определения относительно того, сдерживается или нет активация помощи в избегании столкновения как таковая, даже если поперечные позиции движущегося впереди транспортного средства 60 и транспортного средства 10, оба из которых движутся по идентичной дороге, отклоняются друг от друга вследствие кривизны и т.п., относительная поперечная скорость Vy является небольшой, но когда поперечные позиции движущегося впереди транспортного средства 60 и транспортного средства 10 отклоняются друг от друга вследствие смены полосы движения, относительная поперечная скорость Vy является большой. Соответственно, можно отличать смену полосы движения от кривизны и т.п. надлежащим образом.
[0086] (3) Величина зависимого от времени изменения между транспортным средством 10 и движущимся впереди транспортным средством 60 обнаруживается на основе относительной поперечной скорости Vy. Если относительная поперечная скорость Vy движущегося впереди транспортного средства 60 является небольшой, оценивается то, что движущееся впереди транспортное средство 60 не уходит с направления движения транспортного средства 10, но если относительная поперечная скорость Vy является большой, оценивается то, что движущееся впереди транспортное средство 60 уходит с направления движения транспортного средства 10. Эта относительная поперечная скорость Vy между транспортным средством 10 и движущимся впереди транспортным средством 60, движущимися по идентичной дороге, на которую оказывает влияние форма дороги, попадает в предварительно определенный диапазон, так что можно отличать изменение вследствие формы дороги, к примеру кривизны, от изменения вследствие смены полосы движения, надлежащим образом.
[0087] (4) Даже в случае, если время Ta до столкновения не превышает время Tb торможения, и избегание столкновения является затруднительным посредством нормального торможения, если водитель выполняет операцию избегания посредством руления, или если движущееся впереди транспортное средство сменяет полосу движения, активация помощи в избегании столкновения может сдерживаться. В силу этого, уменьшается такая активация помощи при вождении, которая заставляет водителя испытывать беспокойство.
[0088] (5) Поскольку время Tb торможения, на которое в основном оказывает влияние относительная скорость Vr, получается на основе относительной скорости Vr между транспортным средством 10 и движущимся впереди транспортным средством 60, надлежащее время Tb торможения может получаться.
ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Второй вариант осуществления, который осуществляет устройство помощи при вождении и способ помощи при вождении, описывается со ссылкой на фиг. 11-15.
[0089] Настоящий вариант осуществления отличается от первого варианта осуществления тем, что целевая область в качестве области, полученной с учетом характеристики поворачиваемости транспортного средства, используется для определения относительно того, сдерживается или нет активация помощи в избегании столкновения, но другие конфигурации являются идентичными первому варианту осуществления. С учетом этого, далее описывается конфигурация, отличающаяся от первого варианта осуществления, и для целей этого описания, идентичная конфигурация имеет ссылочную позицию, идентичную ссылочной позиции для первого варианта осуществления, и ее подробное описание опускается.
[0090] Как проиллюстрировано на фиг. 11, узел 20 вычисления относительной информации включает в себя узел 24 определения позиции, который определяет поперечную позицию в направлении ширины транспортного средства 10 в отношении движущегося впереди транспортного средства 60 в качестве объекта, присутствующего впереди транспортного средства 10 в направлении движения. Узел 20 вычисления относительной информации выводит поперечную позицию движущегося впереди транспортного средства 60, вычисленную таким образом в узле 24 определения позиции, в узел 50 управления помощью.
[0091] Узел 24 определения позиции определяет поперечную позицию движущегося впереди транспортного средства 60, указываемого посредством узла 14 указания объектов. Поперечная позиция движущегося впереди транспортного средства 60 в направлении ширины транспортного средства 10 определяется на основе информации окружения транспортного средства относительно движущегося впереди транспортного средства 60, вводимой из узла 15 получения информации окружения транспортного средства.
[0092] Как проиллюстрировано на фиг. 12(b), 12(c), узел 24 определения позиции обнаруживает, например, то, что позиция P2a, соответствующая левому заднему концу движущегося впереди транспортного средства 60, присутствует впереди с правой стороны транспортного средства 10. Позиция P2a является позицией, заданной в области впереди транспортного средства 10 с учетом перекрывающейся позиции между транспортным средством 10 и движущимся впереди транспортным средством 60, и соответствует позиции P2 определения в области определения.
[0093] Со ссылкой на фиг. 13, 14, далее описывается целевая область At, проиллюстрированная на фиг. 12(b). Целевая область At представляет собой область, секционированную впереди транспортного средства 10 в направлении движения с учетом характеристики поворачиваемости транспортного средства 10. Фиг. 13 описывает случай Vr≥R1, а фиг. 14 описывает случай Vr<R1.
[0094] Как проиллюстрировано на фиг. 13, когда транспортное средство 10 поворачивает налево, правый конец транспортного средства 10 рисует траекторию перемещения, которая постепенно изменяется к левой стороне, такую как линия LLt траектории левого поворота, по мере того, как движется транспортное средство 10. С другой стороны, когда транспортное средство 10 поворачивает направо, левый конец транспортного средства 10 рисует траекторию перемещения, которая постепенно изменяется к правой стороне, такую как линия LRt траектории правого поворота, по мере того, как движется транспортное средство 10. Затем целевая область At задается в диапазоне, секционированном посредством линии LLt траектории левого поворота, линии LRt траектории правого поворота и передней части транспортного средства 10.
[0095] Как проиллюстрировано на фиг. 14, когда пересечение между линией LRt траектории правого поворота и линией LLt траектории левого поворота превышает граничную линию Lb торможения, целевая область At может задаваться в области, секционированной посредством линии LRt траектории правого поворота, линии LLt траектории левого поворота, граничной линии Lb торможения и передней части транспортного средства 10.
[0096] Если позиция P2a включена в целевую область At, узел 50 управления помощью не сдерживает активацию помощи в избегании столкновения, но если позиция P2a не включена в целевую область At, узел 50 управления помощью определяет, сдерживается или нет активация помощи в избегании столкновения.
[0097] Более конкретно, узел 50 управления помощью оценивает время до столкновения, полученное согласно входной позиции, в качестве позиции, в которой позиция P2a входит в целевую область At. Время до столкновения, оцененное таким образом, предполагается в качестве границы между второй областью A2 и четвертой областью A4, что является эквивалентным тому, что граничная линия Ls руления перемещается (заменяется) на время до столкновения, оцененное таким образом. Более конкретно, в случае, если позиция переднего хода относительно центра в направлении ширины транспортного средства 10 представляет собой входную позицию, например, входная позиция соответствует граничной линии Ls руления, так что узел 50 управления помощью оценивает время Ta до столкновения. Дополнительно, в случае, если входная позиция представляет собой правую концевую позицию или левую концевую позицию транспортного средства 10, например, узел 50 управления помощью оценивает минимальное время до столкновения как 0. Дополнительно, в случае, если позиция P2a от центра в направлении ширины транспортного средства 10 к правому концу или левому концу транспортного средства 10 представляет собой входную позицию, узел 50 управления помощью оценивает время, не большее времени Ta до столкновения, но не меньшее минимального времени до столкновения, т.е. узел 50 управления помощью задает время, оцененное таким образом, в качестве границы между второй областью A2 и четвертой областью A4.
[0098] Узел 50 управления помощью включает в себя: узел 51 оценки, который определяет, активируется или нет помощь в избегании столкновения; и узел 52 регулирования, который определяет, сдерживается или нет активация помощи в избегании столкновения.
В случае фиг. 12(a), 12(b), когда граничная линия Ls руления в области определения заменена временем до столкновения, оцененным таким образом, узел 51 оценки определяет то, что "помощь в избегании столкновения активируется", при условии, что позиция P2 определения находится в четвертой области A4, т.е. при условии, что позиция P2a включена в целевую область At. Между тем, когда граничная линия Ls руления в области определения заменена временем до столкновения, оцененным таким образом, узел 51 оценки определяет то, что "устанавливается условие для того, чтобы активировать помощь в избегании столкновения", при условии, что позиция P2 определения находится во второй области A2, т.е. при условии, что позиция P2a не включена в целевую область At. Затем узел 51 оценки выводит результат определения в узел 52 регулирования.
[0099] Когда результат определения, вводимый из узла 51 оценки, заключается в том, что "устанавливается условие для того, чтобы активировать помощь в избегании столкновения", узел 52 регулирования определяет, сдерживается или нет помощь в избегании столкновения, на основе сравнения относительной поперечной скорости Vy между транспортным средством 10 и движущимся впереди транспортным средством 60 с пороговым значением TH1 активации. В силу этого, необходимость помощи в избегании столкновения определяется надлежащим образом, и когда вероятность столкновения является высокой, помощь в избегании столкновения активируется, а когда вероятность столкновения является низкой, помощь в избегании столкновения не активируется.
[0100] В настоящем варианте осуществления, граничная линия Ls руления заменяется оцененным временем до столкновения и, если позиция P2a объекта находится за пределами целевой области At, можно определять то, что вероятность столкновения является низкой. В силу этого, случай, в котором вероятность столкновения является низкой, определяется более целесообразно, и когда вероятность столкновения является низкой, помощь в избегании столкновения не выполняется.
[0101] Как описано выше, согласно устройству помощи при вождении настоящего варианта осуществления, можно получать следующее преимущество в дополнение к преимуществам (1)-(5), описанным в первом варианте осуществления.
(6) С учетом характеристики поворачиваемости транспортного средства 10, время T1 руления (граничная линия Ls руления), которое должно сравниваться со временем Ta до столкновения, заменено временем, которое должно получаться согласно входной позиции, которая является позицией, в которой объект входит в целевую область В. Время, которое должно быть заменено, является временем T1 руления в случае, если входная позиция представляет собой центр по ширине транспортного средства 10 и, когда входная позиция находится на большом расстоянии от центра по ширине транспортного средства, время, которое должно быть заменено, становится меньше времени T1 руления. Это обеспечивает возможность надлежащего задержания активации помощи при вождении, связанной с избеганием столкновения. Поскольку транспортное средство 10 имеет ширину, с учетом характеристики поворачиваемости транспортного средства 10, избегание столкновения для объекта может выполняться даже в состоянии, в котором транспортное средство 10 находится ближе к нему, в то время, когда объект находится в позиции, которая находится на большом расстоянии от центра по ширине транспортного средства, по сравнению со случаем, в котором объект находится в центре по ширине транспортного средства. Соответственно, активация помощи при вождении транспортного средства 10 относительно объекта в позиции, которая находится на большом расстоянии от центра по ширине транспортного средства, может сдерживаться на основе относительной поперечной скорости Vy даже в таком состоянии, в котором транспортное средство 10 находится ближе к объекту, по сравнению с объектом в центре по ширине транспортного средства. В силу этого, может еще больше сдерживаться такая активация помощи при вождении, которая заставляет водителя испытывать беспокойство.
[0102] ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Третий вариант осуществления, который осуществляет устройство помощи при вождении и способ помощи при вождении, описывается со ссылкой на фиг. 15, 16.
[0103] Настоящий вариант осуществления отличается от первого варианта осуществления тем, что используются пороговое значение активации и пороговое значение уровня, но другие конфигурации являются идентичными первому варианту осуществления. С учетом этого, далее описывается конфигурация, отличающаяся от первого варианта осуществления, и для целей этого описания, идентичная конфигурация имеет ссылочную позицию, идентичную ссылочной позиции для первого варианта осуществления, и ее подробное описание опускается.
[0104] Как проиллюстрировано на фиг. 15, пороговое значение TH1 активации и пороговое значение TH2 уровня, которое является значением, большим порогового значения TH1 активации, задаются в узле 40 хранения. Дополнительно, период (короткий период), который является коротким в качестве периода, соответствующего пороговому значению TH1 активации, и период (длительный период), который превышает короткий период в качестве периода, соответствующего пороговому значению TH2 уровня, задается в периоде 41 подавления. Если короткий период задается в качестве времени, меньшего длительного периода, опорное значение (единица), используемое для того, чтобы задавать период, может быть временем и т.п., отличным от рабочего цикла.
[0105] Когда относительная поперечная скорость Vy не меньше порогового значения TH1 активации, но меньше порогового значения TH2 уровня, вероятность столкновения временно понижается, так что узел 52 регулирования сдерживает помощь в избегании столкновения в течение короткого периода, заданного в периоде 41 подавления. Дополнительно, когда относительная поперечная скорость Vy не меньше T2 порогового значения уровня, вероятность столкновения понижается на некоторое время, так что узел 52 регулирования сдерживает помощь в избегании столкновения в течение длительного периода, заданного в периоде 41 подавления.
[0106] Иными словами, узел 52 регулирования выбирает надлежащий период подавления из периода 41 подавления согласно уровню вероятности столкновения, оцененному из относительной поперечной скорости Vy. Затем независимо от результата определения узла 51 оценки, узел 52 регулирования не активирует помощь в избегании столкновения в течение периода подавления, выбранного таким образом. Другими словами, необходимость помощи в избегании столкновения определяется надлежащим образом на основе уровня вероятности столкновения, и когда вероятность столкновения является низкой, помощь в избегании столкновения не активируется.
[0107] Когда узел 52 регулирования сдерживает активацию помощи в избегании столкновения в течение длительного периода, может уменьшаться влияние вследствие анормального значения, временно вызываемого в относительной поперечной скорости Vy.
Как проиллюстрировано на фиг. 16, даже если определяется то, что вероятность столкновения является низкой в течение некоторого времени, затруднительно избегать варьирования относительной поперечной скорости Vy в расчете на рабочий цикл. Например, аналогично 0,1 м/с, показанному в пятом рабочем цикле, если обнаруживается относительная поперечная скорость Vy с низкой вероятностью избегания столкновения, помощь в избегании столкновения может активироваться на основе относительной поперечной скорости Vy. В настоящем варианте осуществления, когда определяется то, что вероятность столкновения является низкой в течение некоторого времени, активация помощи в избегании столкновения сдерживается независимо от значения относительной поперечной скорости Vy, вычисленного в расчете на рабочий цикл, в течение длительного периода, выбранного из периода 41 подавления. В силу этого, уменьшается влияние, которое анормальность, временно вызываемая в относительной поперечной скорости Vy, оказывает на помощь в избегании столкновения. В силу этого, эффективно сдерживается необязательная активация помощи в избегании столкновения.
[0108] Как описано выше, согласно устройству помощи при вождении настоящего варианта осуществления, можно обеспечивать следующие преимущества в дополнение к преимуществам (1)-(5), описанным в первом варианте осуществления.
(7) Период 41 подавления, который представляет собой период для того, чтобы сдерживать активацию помощи в избегании столкновения, регулируется (выбирается) на основе относительной поперечной скорости Vy. Иными словами, на основе относительной поперечной скорости Vy выбирается надлежащий период 41 подавления.
[0109] (8) Если относительная поперечная скорость Vy является большой, то объект с большой вероятностью должен уходить с курса движения транспортного средства 10, так что вероятность столкновения транспортного средства 10 с объектом является низкой. Соответственно, когда вероятность ухода с курса движения является высокой, т.е. когда вероятность столкновения является низкой, период 41 подавления продлевается, в силу этого позволяя уменьшать вероятность такой активации помощи в избегании столкновения, которая заставляет водителя испытывать беспокойство.
[0110] ЧЕТВЕРТЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Четвертый вариант осуществления, который осуществляет устройство помощи при вождении и способ помощи при вождении, описывается со ссылкой на фиг. 17.
[0111] Настоящий вариант осуществления описывает функцию для того, чтобы корректировать относительную поперечную скорость, причем эта функция может быть включена в конфигурацию первого варианта осуществления, таким образом, другие конфигурации, отличные от конфигурации, связанной с функцией, являются идентичными первому варианту осуществления. С учетом этого, далее описывается конфигурация, отличающаяся от первого варианта осуществления, и для целей этого описания, идентичная конфигурация имеет ссылочную позицию, идентичную ссылочной позиции для первого варианта осуществления, и ее подробное описание опускается.
[0112] Обычно, информация окружения транспортного средства, вводимая из узла 15 получения информации окружения транспортного средства, требует длительного времени для того, чтобы обнаруживать информацию относительно объекта. Между тем, в отношении информации касательно транспортного средства, вводимой из узла 18 получения информации касательно транспортного средства, обнаружение информации относительно транспортного средства 10 может выполняться за короткое время, например, за время, не большее от одной пятой части до одной десятой от длительного времени. С учетом этого, когда руление обнаруживается в транспортном средстве 10, относительная поперечная скорость Vy объекта вычисляется посредством узла 23 вычисления величины поперечного изменения посредством отражения информации руления транспортного средства 10, обнаруженного таким образом. В силу этого, может увеличиваться отклик для относительной поперечной скорости Vy объекта.
[0113] Как проиллюстрировано на фиг. 17, в настоящем варианте осуществления, когда компонент V1y поперечной скорости вызывается в транспортном средстве 10, узел 23 вычисления величины поперечного изменения выполняет коррекцию таким образом, что относительная поперечная скорость Vy объекта включает в себя компонент V1y поперечной скорости транспортного средства 10.
[0114] В случае, если скорость относительно вертикальной оси увеличивается от фиг. 17(a) к 17(b), узел 23 вычисления величины поперечного изменения не может сразу получать увеличение относительной поперечной скорости объекта из информации окружения транспортного средства, вводимой из узла 15 получения информации окружения транспортного средства. Одна из причин заключается в том, что узлу 15 получения информации окружения транспортного средства требуется длительное время для того, чтобы обнаруживать объект.
[0115] С учетом этого, когда изменяется скорость относительно вертикальной оси транспортного средства 10, узел 23 вычисления величины поперечного изменения вычисляет относительную поперечную скорость Vy посредством прибавления компонента поперечной скорости, полученного из скорости относительно вертикальной оси транспортного средства 10.
В силу этого, относительная поперечная скорость Vy объекта может получаться в качестве большого значения, так что необходимость помощи в избегании столкновения управляется более целесообразно, с тем чтобы эффективно сдерживать необязательную активацию помощи в избегании столкновения.
[0116] Как описано выше, согласно устройству помощи при вождении настоящего варианта осуществления, можно получать следующее преимущество в дополнение к преимуществам (1)-(5), описанным в первом варианте осуществления.
(9) Относительная поперечная скорость Vy объекта корректируется на основе такого направления движения (ориентации) транспортного средства, которое изменяется посредством операции руления (руления) и т.п. Посредством коррекции относительной поперечной скорости Vy объекта посредством изменения направления движения транспортного средства 10 может быть улучшен отклик для обнаружения относительной поперечной скорости Vy. Например, по сравнению с датчиком, который измеряет состояние транспортного средства, эта величина относительного зависимого от времени изменения объекта, который обнаруживается на основе радара и т.п. с низким откликом, естественно, имеет низкий отклик. С учетом этого, посредством использования результата измерений датчика, имеющего быстрый отклик и измеряющего состояние транспортного средства, к примеру, скорости относительно вертикальной оси, можно добиваться быстрого отклика относительной поперечной скорости Vy.
[0117] ДРУГОЙ РЕЖИМ ОСУЩЕСТВЛЕНИЯ
Следует отметить, что каждый из вышеописанных вариантов осуществления может выполняться в нижеприведенном варианте осуществления.
Вышеописанные варианты осуществления иллюстрируют различные конфигурации. Альтернативно, любые две или более из конфигураций первого-четвертого вариантов осуществления могут комбинироваться. Это повышает конструктивную гибкость устройства помощи при вождении, в силу этого позволяя более целесообразно сдерживать активацию помощи в избегании столкновения.
[0118] Вышеописанные варианты осуществления иллюстрируют случай, в котором узел 15 получения информации окружения транспортного средства состоит из бортовой камеры 151, радара 152 диапазона миллиметровых волн и передающего устройства 153. Альтернативно, узел получения информации окружения транспортного средства может состоять по меньшей мере из одного из бортовой камеры, радара диапазона миллиметровых волн и передающего устройства. Дополнительно, узел получения информации окружения транспортного средства может представлять собой различные датчики, которые могут получать относительное расстояние до объекта и относительную поперечную позицию, и узел получения информации окружения транспортного средства более предпочтительно представляет собой датчик, который может непосредственно получать относительную скорость, относительное ускорение и относительную поперечную скорость.
[0119] Вышеописанные варианты осуществления иллюстрируют случай, в котором узел 18 получения информации касательно транспортного средства состоит из датчика 181 скорости, датчика 182 ускорения, датчика 183 скорости относительно вертикальной оси, датчика 184 акселератора, датчика 185 торможения и датчика 186 рулевого управления. Альтернативно, узел получения информации касательно транспортного средства может состоять по меньшей мере из двух: датчика скорости, датчика ускорения, датчика скорости относительно вертикальной оси, датчика акселератора, датчика торможения и датчика рулевого управления.
[0120] Вышеописанные варианты осуществления иллюстрируют случай, в котором относительная поперечная скорость Vy является величиной относительного зависимого от времени изменения, используемой для определения относительно того, сдерживается или нет активация помощи в избегании столкновения. Альтернативно, в качестве величины относительного зависимого от времени изменения, используемой для определения относительно того, сдерживается или нет активация помощи в избегании столкновения, может использоваться относительное поперечное ускорение.
[0121] Вышеописанные варианты осуществления иллюстрируют случай, в котором пороговое значение, к примеру, пороговое значение TH1 активации или пороговое значение TH2 уровня, которое должно сравниваться с относительной поперечной скоростью, является одинаковым независимо от типа объекта. Альтернативно, пороговое значение, которое должно сравниваться с относительной поперечной скоростью, может изменяться согласно типу объекта.
[0122] Как проиллюстрировано на фиг. 18, например, пороговое значение, которое должно сравниваться с относительной поперечной скоростью, может задаваться согласно типу объекта, так что пороговое значение задается равным Ti1 для движущегося впереди транспортного средства, Ti2 для встречного транспортного средства и Ti3 для стационарного объекта.
Дополнительно, пороговое значение, которое должно сравниваться с относительной поперечной скоростью, может не изменяться согласно типу объекта, а вместо этого может изменяться период подавления.
[0123] Дополнительно, пороговое значение, которое должно сравниваться с относительной поперечной скоростью, может изменяться согласно типу объекта и период подавления может изменяться согласно типу объекта.
Это повышает конструктивную гибкость устройства помощи при вождении.
[0124] Вышеописанные варианты осуществления иллюстрируют случай, в котором пороговое значение, к примеру, пороговое значение TH1 активации или пороговое значение TH2 уровня, которое должно сравниваться с относительной поперечной скоростью, является одинаковым независимо от расстояния до объекта. Альтернативно, пороговое значение, которое должно сравниваться с относительной поперечной скоростью, может изменяться согласно расстоянию до объекта. Иными словами, предпочтительно устанавливать пороговое значение с учетом характеристики относительной поперечной скорости, которая обнаруживается как большая согласно длине расстояния между транспортными средствами между транспортным средством и движущимся впереди транспортным средством.
[0125] Как проиллюстрировано на фиг. 19, например, пороговое значение, которое должно сравниваться с относительной поперечной скоростью согласно расстоянию до объекта, может задаваться равным Td1 для короткого расстояния, Td2 для среднего расстояния и Td3 для большого расстояния. В это время, пороговое значение может задаваться таким образом, что оно удовлетворяет взаимосвязи Td1<Td2<Td3. Это повышает конструктивную гибкость устройства помощи при вождении.
[0126] Вышеописанные варианты осуществления иллюстрируют случай, в котором помощь в избегании столкновения сдерживается в течение периода 41 подавления. Альтернативно, период подавления может продлеваться бесконечно, так что активация помощи в избегании столкновения может сдерживаться до максимума, т.е. может запрещаться. В этом случае, при условии, что объект для помощи в избегании столкновения изменяется, можно снова определять, сдерживается или нет помощь в избегании столкновения. Это повышает конструктивную гибкость устройства помощи при вождении.
[0127] Вышеописанные варианты осуществления иллюстрируют случай, в котором время подавления, пороговое значение TH1 активации и пороговое значение TH2 уровня изменяются согласно типу объекта или расстоянию до объекта. Альтернативно, время подавления, пороговое значение активации и пороговое значение уровня могут изменяться согласно окружающей среде в окрестности транспортного средства, к примеру форме дороги и погоде. Это повышает конструктивную гибкость помощи при вождении.
[0128] Вышеописанные варианты осуществления иллюстрируют случай, в котором относительная поперечная скорость Vy сравнивается с одним или двумя пороговыми значениями (пороговым значением TH1 активации и пороговым значением TH2 уровня). Альтернативно, могут использоваться три или более пороговых значения, которые должны сравниваться с относительной поперечной скоростью. Например, в случае, если используются три или более пороговых значения, продолжительность периода подавления может задаваться отдельно для абсолютной величины каждого порогового значения. Это повышает конструктивную гибкость устройства помощи при вождении.
[0129] Вышеописанные варианты осуществления иллюстрируют случай, в котором, когда позиция P1 определения находится во второй области A2, определяется, активируется или нет помощь в избегании столкновения. Альтернативно, когда позиция определения находится в первой и второй областях, т.е. когда позиция определения находится на граничной линии руления или выше, определяется, активируется или нет помощь в избегании столкновения. В это время, только когда скорость транспортного средства является высокой, определение относительно того, активируется или нет помощь в избегании столкновения, может выполняться при условии, что позиция определения находится в первой и второй областях. Например, в случае, если скорость транспортного средства является высокой, относительная скорость между транспортным средством и движущимся впереди транспортным средством является небольшой и, если расстояние между транспортными средствами является чрезвычайно коротким, даже если время до столкновения является большим, возникновение помощи в избегании столкновения не заставляет водителя испытывать беспокойство.
[0130] Это позволяет повышать вероятность применения устройства помощи при вождении.
Вышеописанные варианты осуществления иллюстрируют случай, в котором узел 11 помощи при вождении содержит узел 14 указания объектов, узел 20 вычисления относительной информации, узел 30 вычисления времени до столкновения и узел 50 управления помощью. Альтернативно, если может быть получена информация, которую запрашивает узел помощи при вождении, часть или все из узла указания объектов, узла вычисления относительной информации, узла вычисления времени до столкновения и узла управления помощью могут обрабатываться посредством различных устройств.
[0131] Это повышает конфигурационную гибкость устройства помощи при вождении.
Вышеописанные варианты осуществления иллюстрируют случай, в котором устройство помощи при вождении предоставляется в транспортном средстве 10. Альтернативно, устройство помощи при вождении может иметь такую конфигурацию, в которой часть узла помощи при вождении, часть или весь узел получения информации окружения транспортного средства и т.п. предоставляются в месте, отличном от транспортного средства. Функция, которая заменяет часть узла помощи при вождении либо некоторые или все функции узла получения информации окружения транспортного средства, может предоставляться во внешнем устройстве, таком как портативный информационный процессор. В таком случае устройство помощи при вождении может иметь возможность получать необходимую информацию из портативного информационного процессора.
[0132] Например, в случае, если портативный информационный процессор представляет собой смартфон, различные процессы могут выполняться посредством выполнения прикладных программ. Дополнительно, смартфон может обнаруживать объект на основе информации трафика и т.п., которая может получаться через Интернет.
[0133] Это повышает конфигурационную гибкость устройства помощи при вождении.
Вышеописанные варианты осуществления иллюстрируют случай, в котором устройство помощи при вождении предоставляется в транспортном средстве 10. Альтернативно, устройство помощи при вождении может предоставляться в подвижном теле, отличном от транспортного средства, например, в судне или в роботе. Это позволяет достигать расширения диапазона применения устройства помощи при вождении.
Описание ссылочных позиций
[0134] 10 - транспортное средство, 11 - узел помощи при вождении, 12 - HMI, 13 - устройство управления предупреждением столкновения, 14 - узел указания объектов, 15 - узел получения информации окружения транспортного средства, 18 - узел получения информации касательно транспортного средства, 20 - узел вычисления относительной информации, 21 - узел вычисления скорости, 22 - узел вычисления времени торможения, 23 - узел вычисления величины поперечного изменения, 24 - узел определения позиции, 30 - узел вычисления времени до столкновения, 31 - узел вычисления TTC, 40 - узел хранения, 41 - период подавления, 50 - узел управления помощью, 51 - узел оценки, 52 - узел регулирования, 60 - движущееся впереди транспортное средство, 61 - дорожное ограждение, 151 - бортовая камера, 152 - радар диапазона миллиметровых волн, 153 - передающее устройство, 181 - датчик скорости, 182 - датчик ускорения, 183 - датчик скорости относительно вертикальной оси, 184 - датчик акселератора, 185 - датчик торможения, 186 - датчик рулевого управления, L - расстояние между транспортными средствами, Lb - граничная линия торможения, Le - линия предостережения, Ls - граничная линия руления, T1 - время руления, T2 - время предостережения, Ta - время до столкновения, Tb - время торможения, V1, V2 - скорость, Vr - относительная скорость, Vy - относительная поперечная скорость, LLt - линия траектории левого поворота, LRt - линия траектории правого поворота, TH1 - пороговое значение активации, TH2 - пороговое значение уровня.
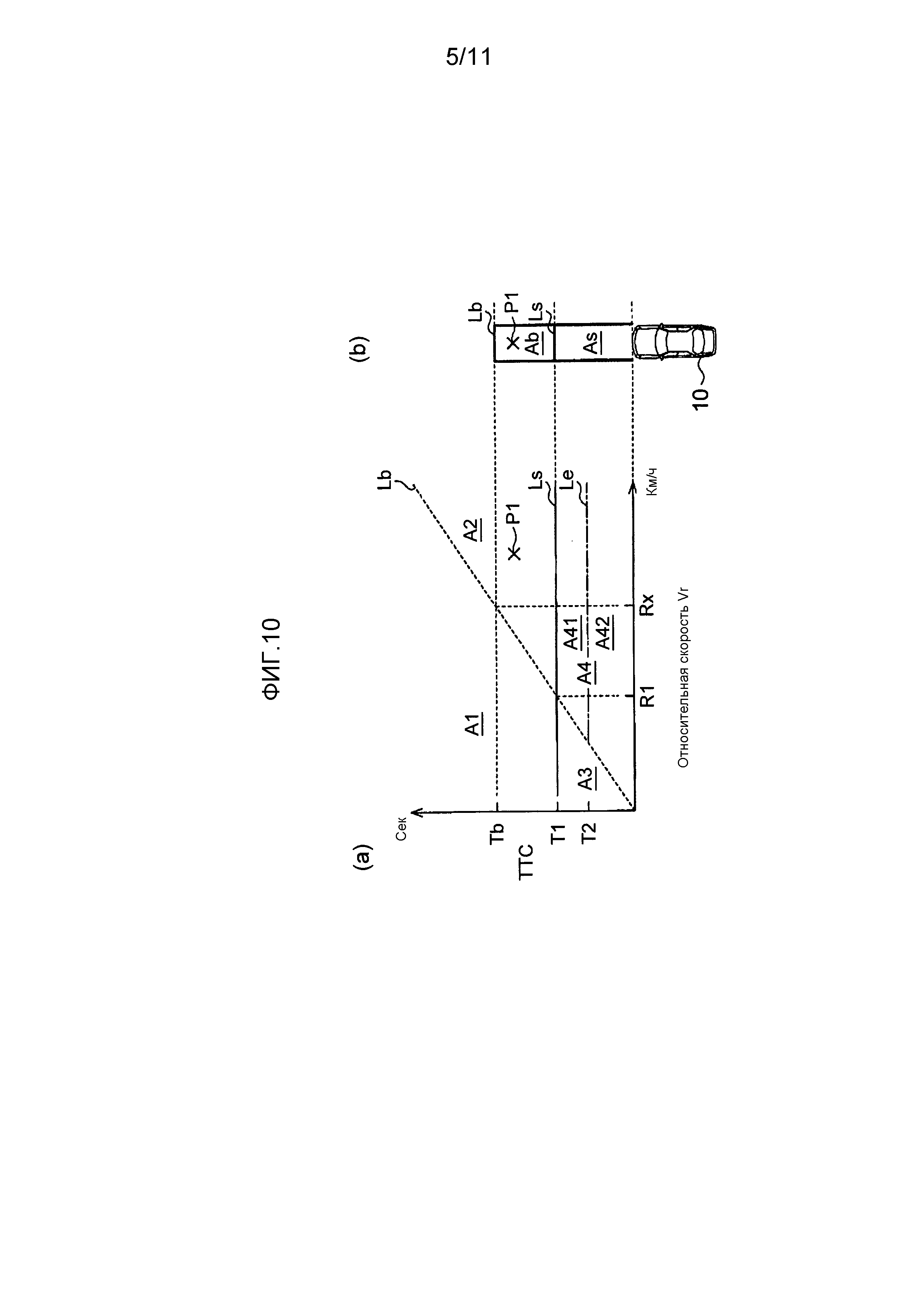
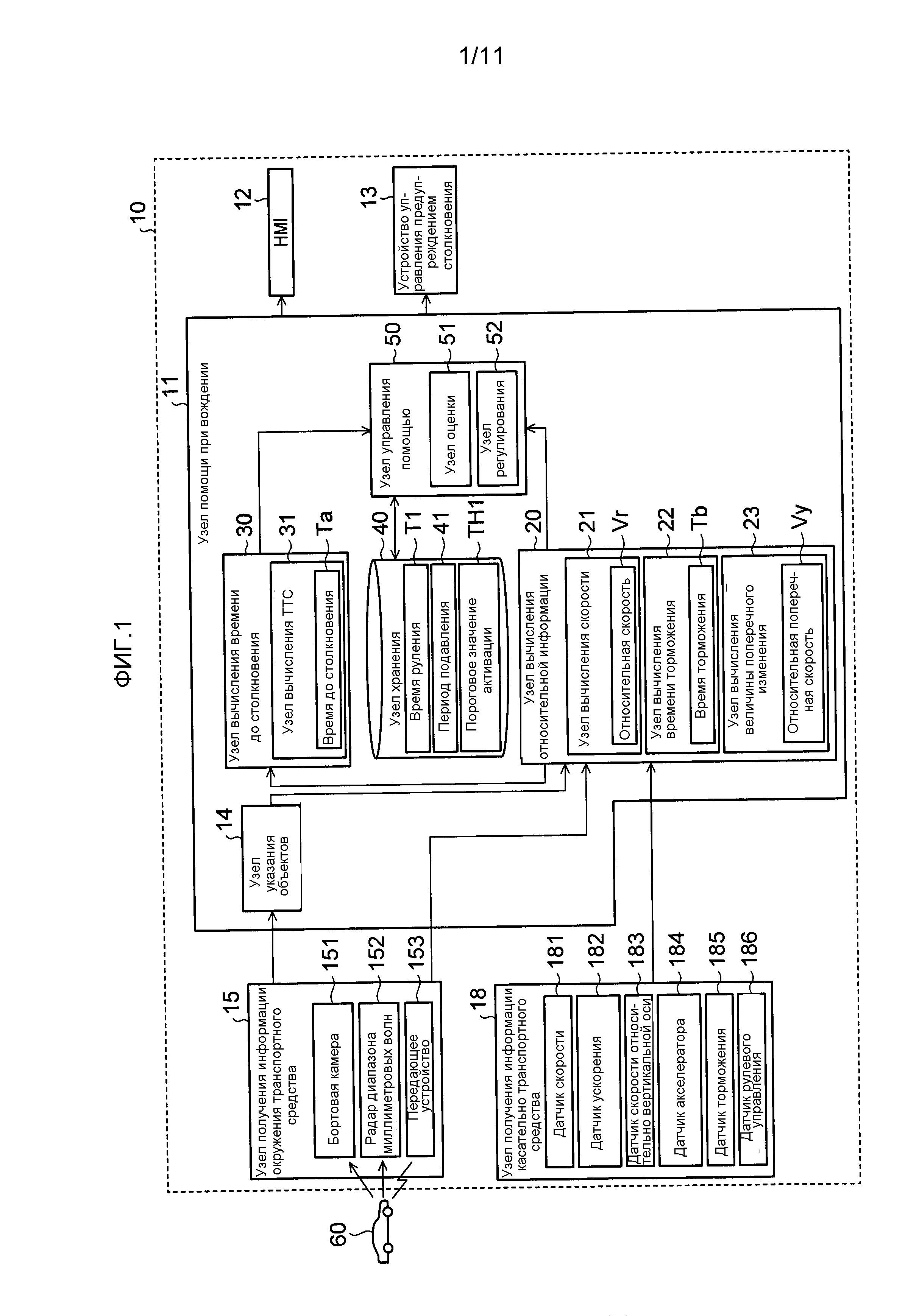
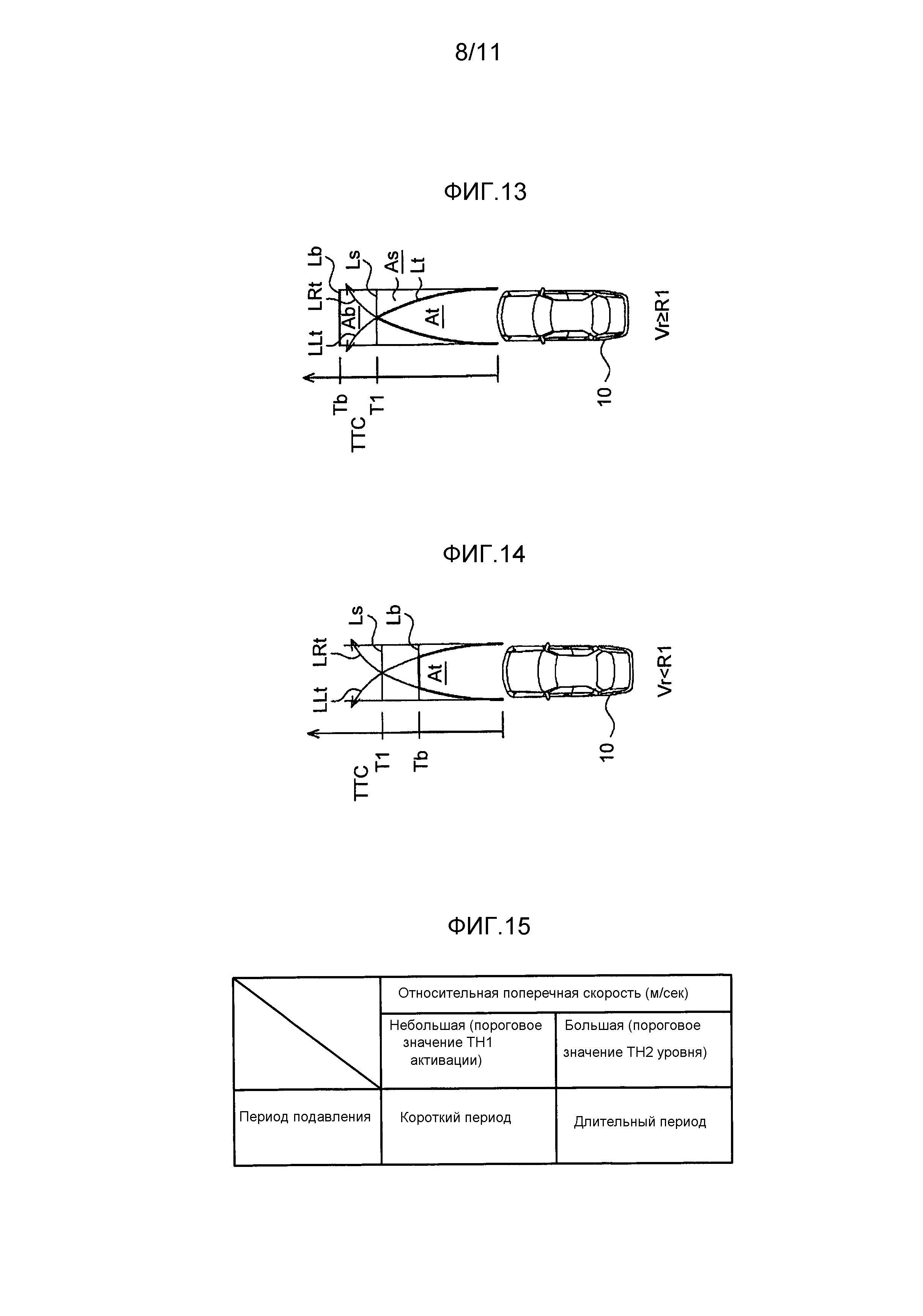
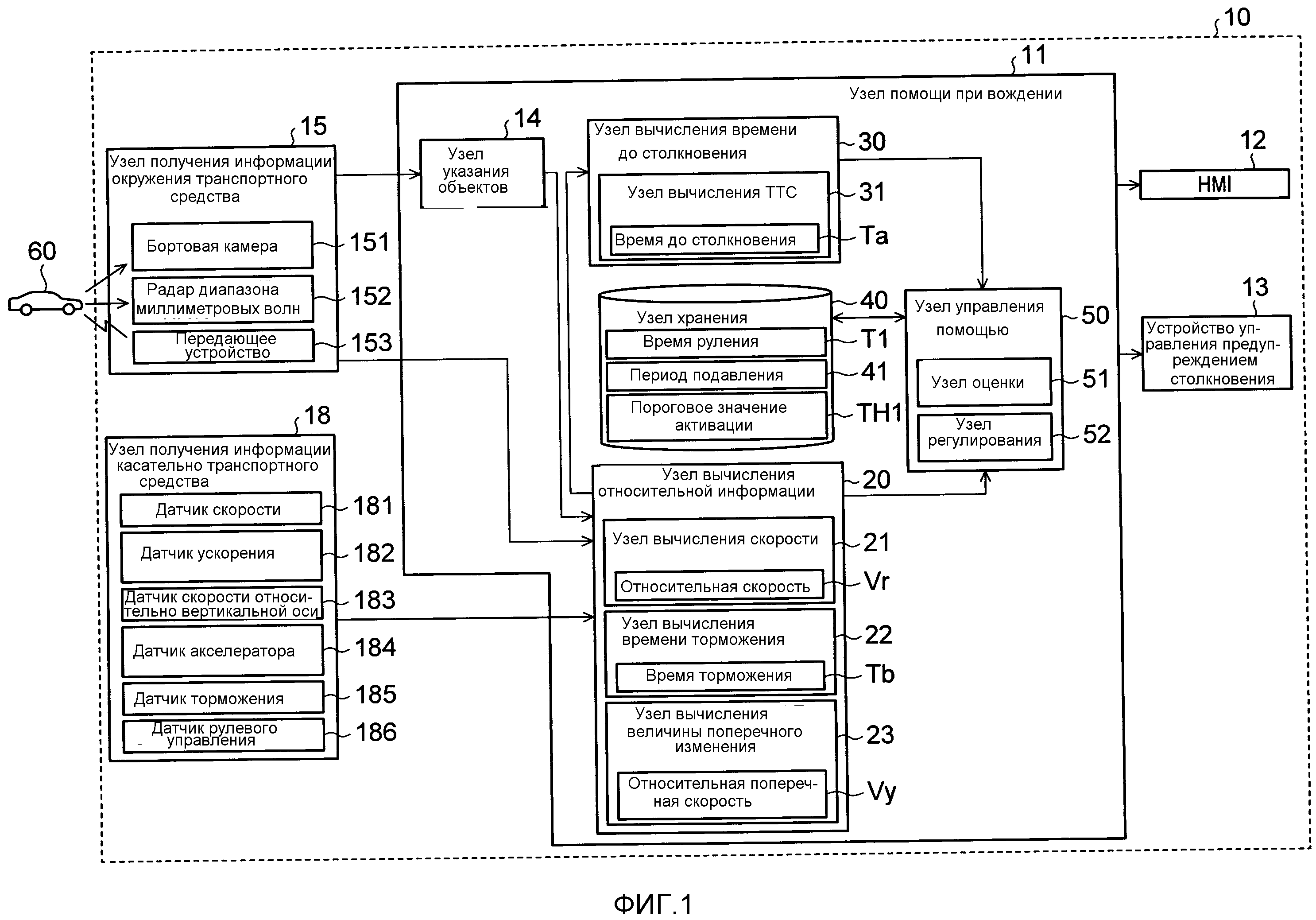
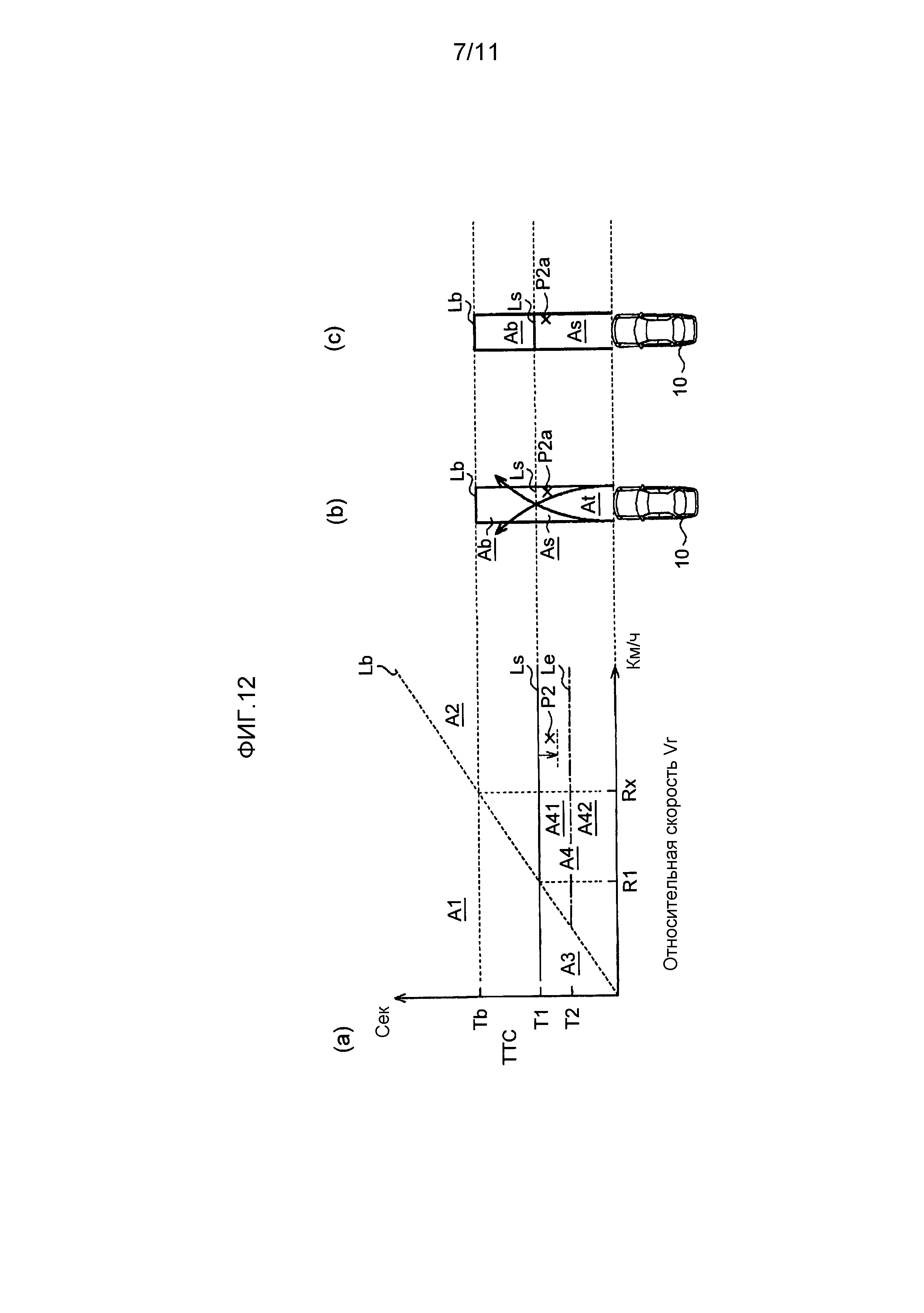
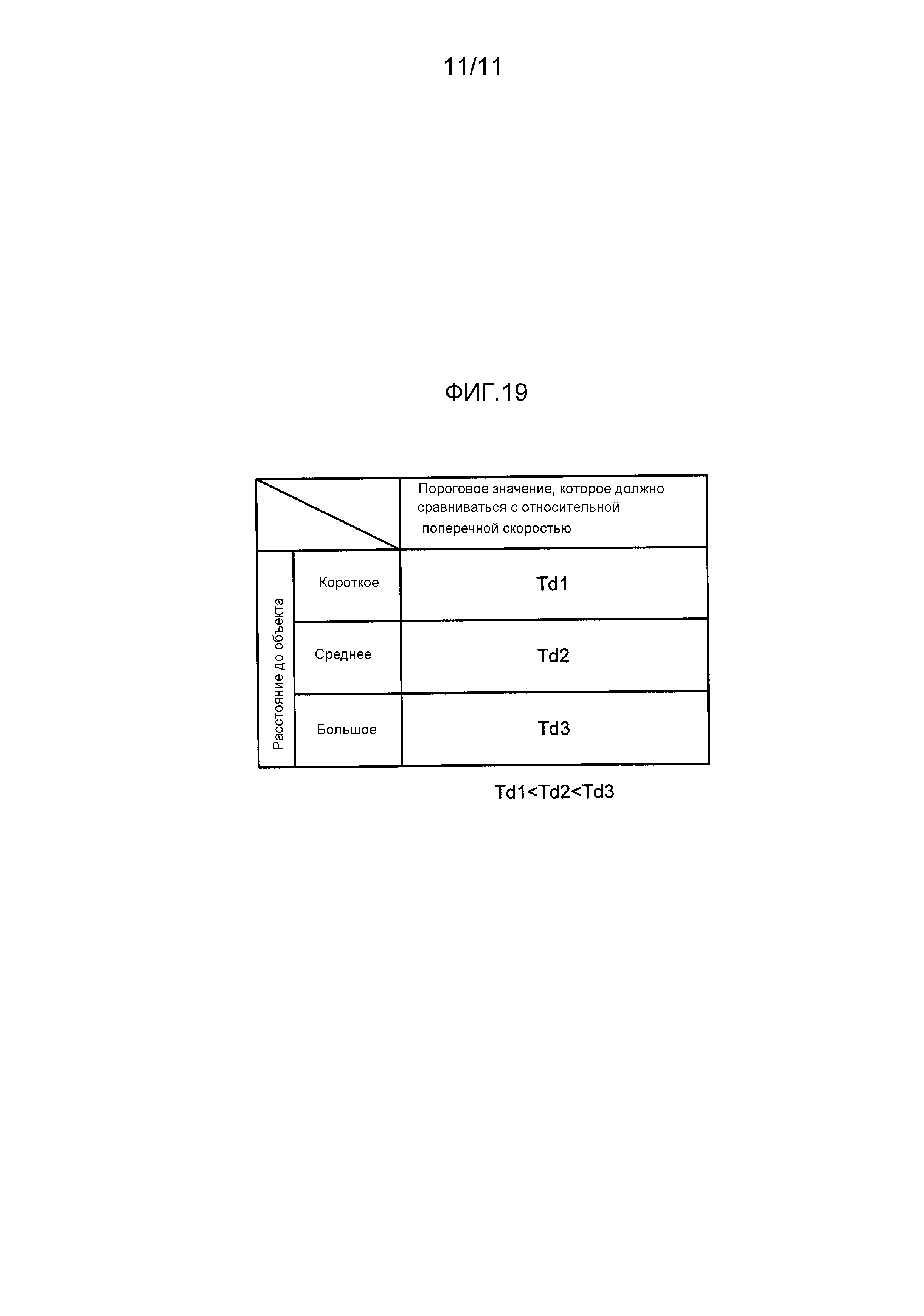
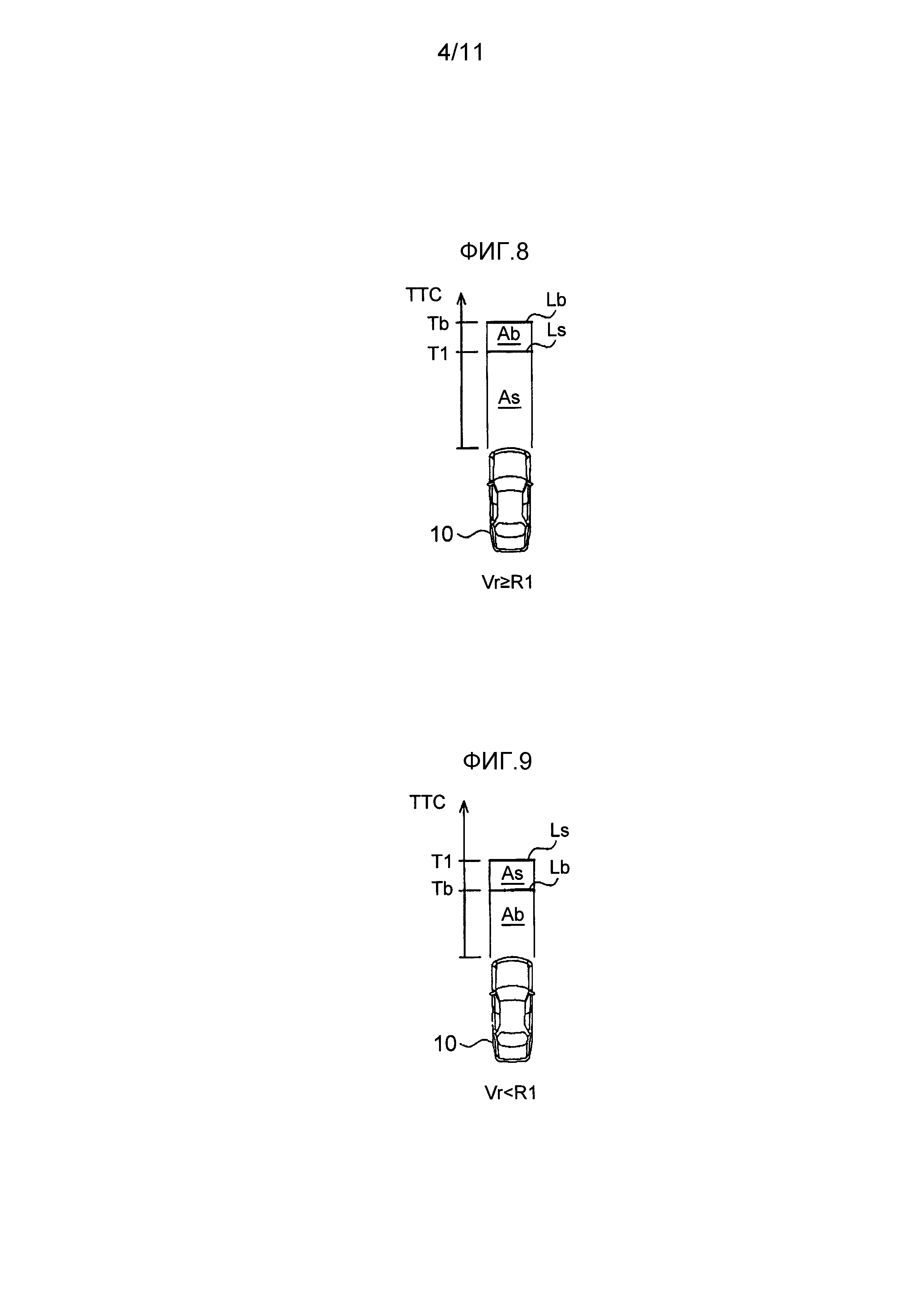
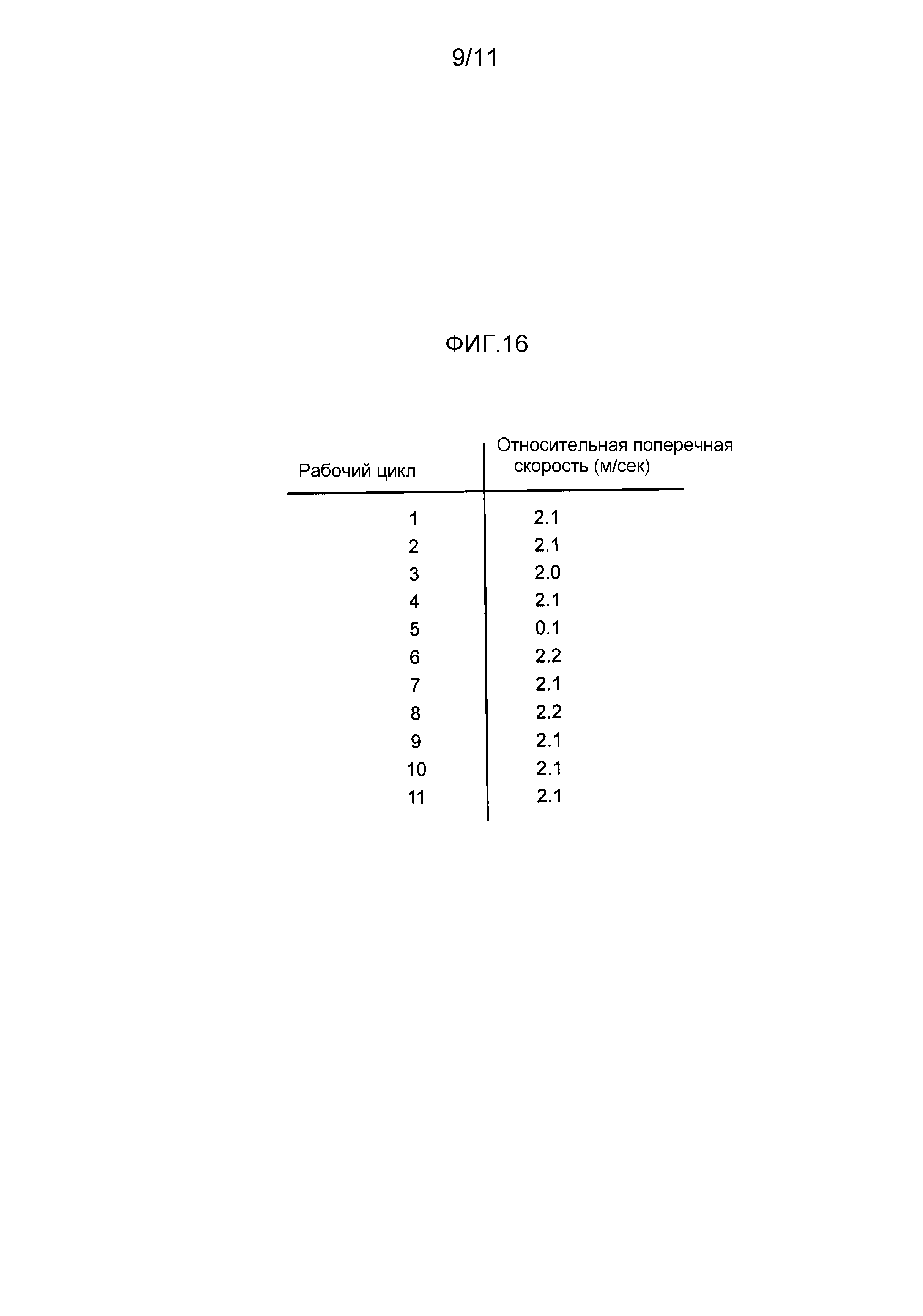
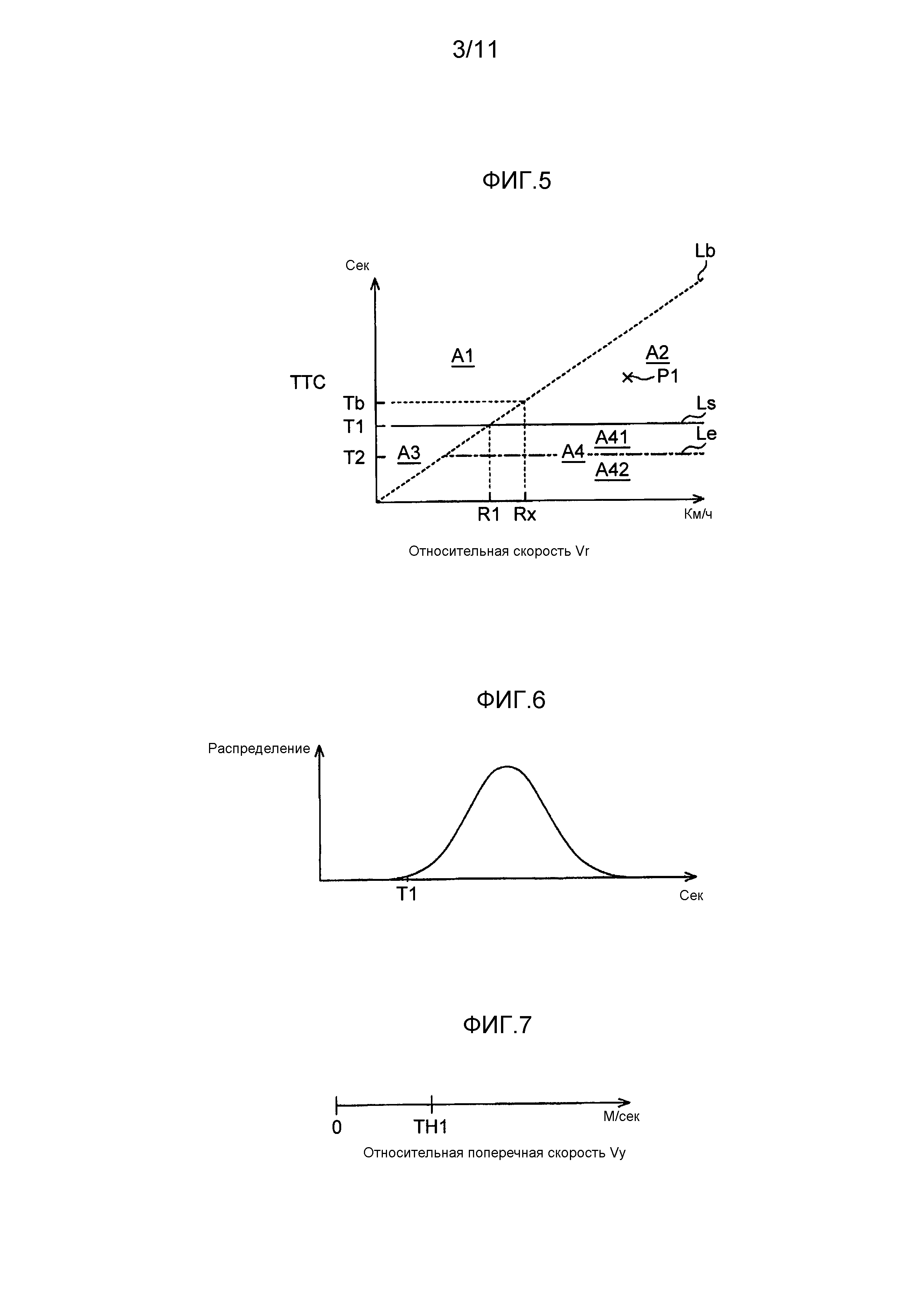
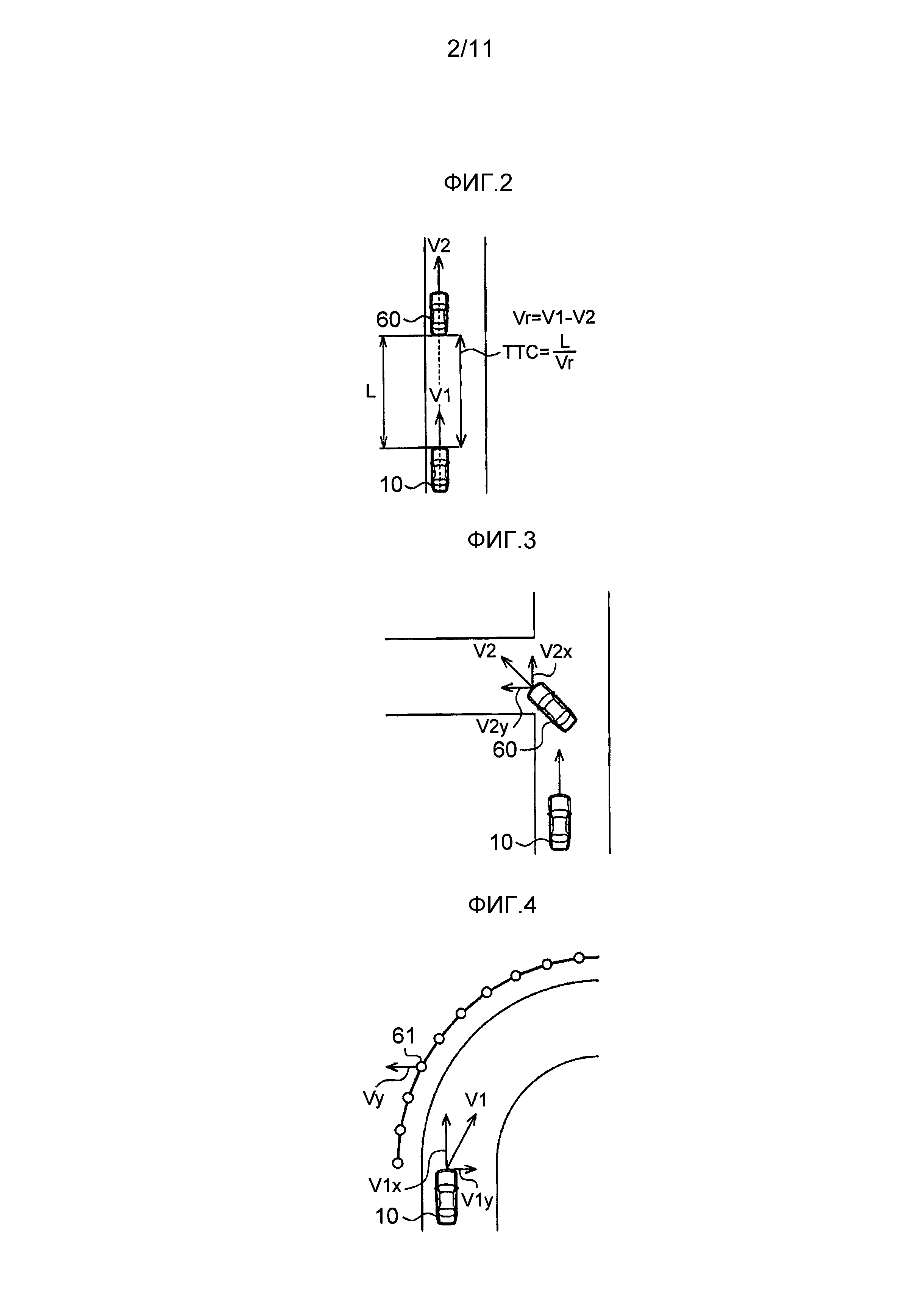
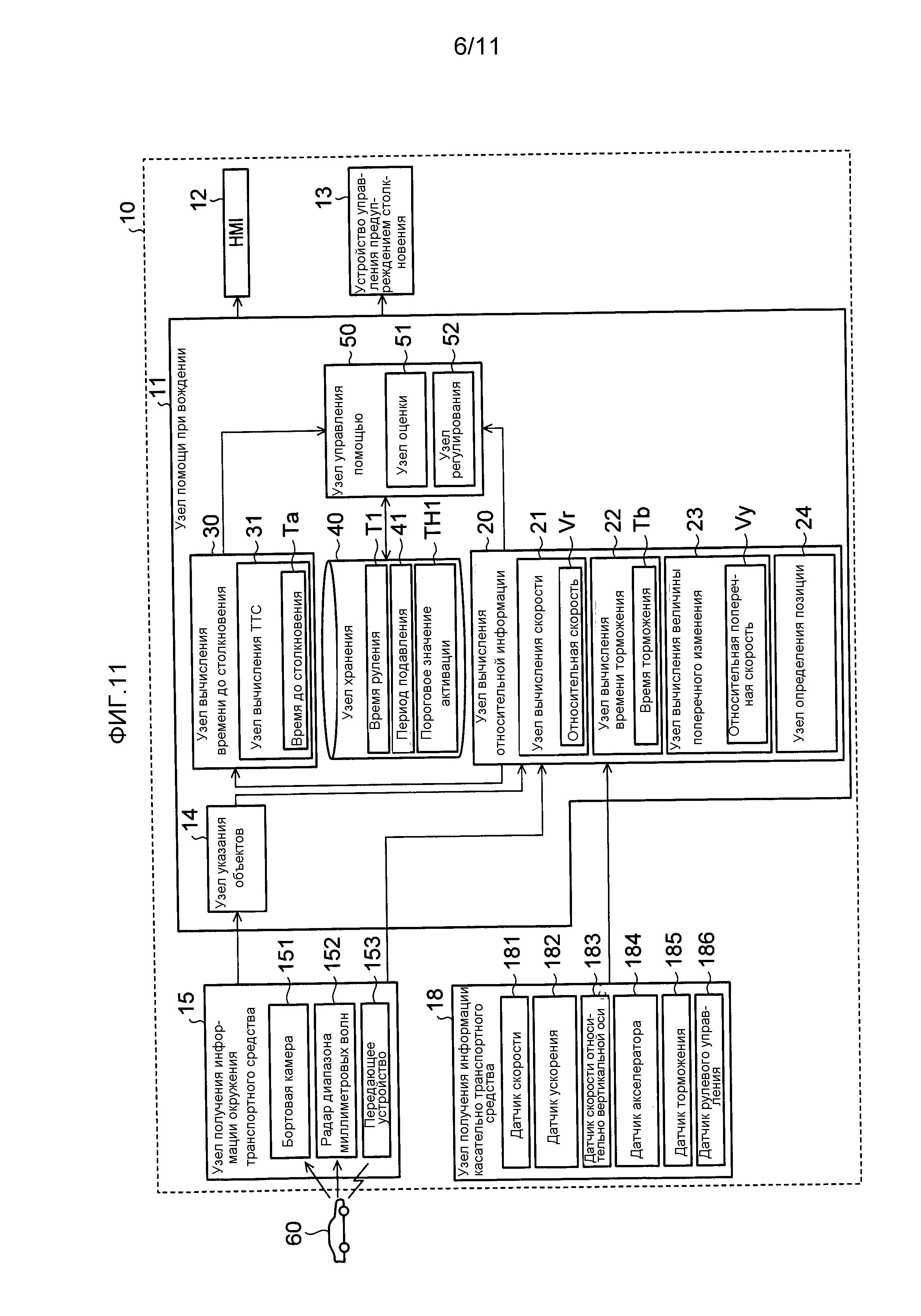
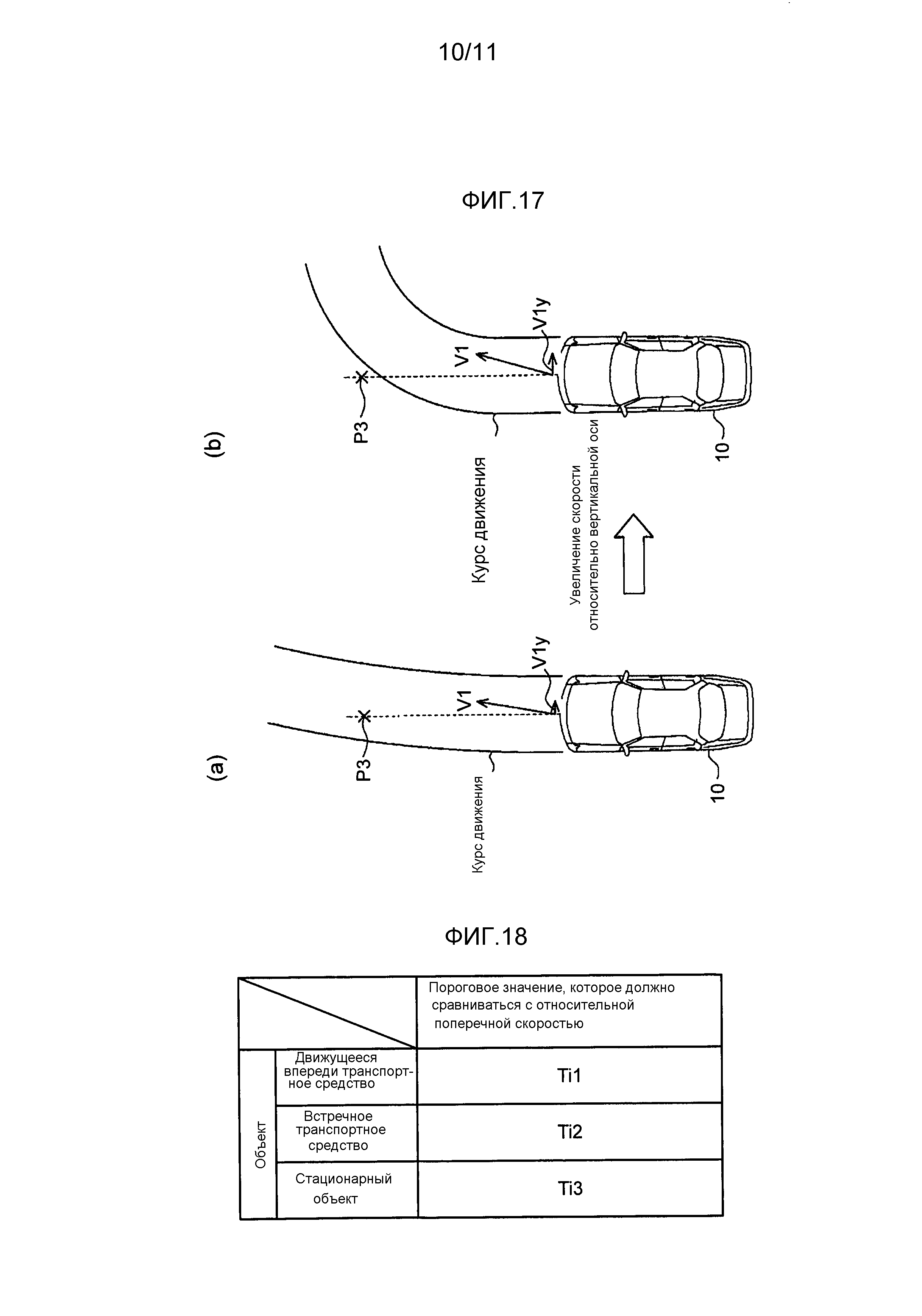
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания

