Результат интеллектуальной деятельности: ОБНОВЛЕНИЕ МИКРОСЕЙСМИЧЕСКИХ ГИСТОГРАММНЫХ ДАННЫХ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к способу выявления преобладающих ориентаций трещины на основании микросейсмических данных. Зачастую микросейсмические данные получают при гидравлическом разрыве пласта, применяемого в подземных пластах. Гидравлический разрыв пласта, как правило, выполняют для того, чтобы вызвать образование искусственных трещин в подземном пласте и, тем самым, улучшить отдачу углеводородов указанного подземного пласта. Давления, создаваемые во время гидравлического разрыва пласта, могут вызвать низкоамплитудные или низкоэнергетические сейсмические события в подземном пласте, причем указанные события можно обнаружить посредством датчиков и собрать соответствующие данные для анализа.
Раскрытие изобретения
В целом, указанные преобладающие ориентации трещины в подземной зоне можно выявить на основании микросейсмических данных.
В некоторых аспектах настоящего изобретения, определяют ориентацию каждой базовой плоскости из множества базовых плоскостей. Указанные базовые плоскости задают копланарными подмножествами данных микросейсмических событий (например, трех или более микросейсмических событий), собранными во время гидравлического разрыва пласта подземной зоны. При этом рассчитывают количество ориентаций базовой плоскости в каждом кластере из множества кластеров. На основании одного или нескольких рассчитанных количеств выявляют преобладающую ориентацию трещины в подземной зоне.
Предпочтительные варианты осуществления настоящего изобретения могут содержать один или несколько следующих признаков. На устройство отображения выводят гистограмму, указывающую на количество ориентаций базовой плоскости в каждом из кластеров. Выявленное количество ориентаций базовой плоскости может представлять собой значение вероятности, значение частоты, числовое значение или значение иного типа.
Дополнительно или в качестве альтернативы, указанные и другие варианты осуществления настоящего изобретения могут содержать один или несколько из следующих признаков. Каждая ориентация базовой плоскости включает в себя угол простирания и угол падения одной из базовых плоскостей. На основании ориентаций базовой плоскости выявляют количество кластеров. Указанное количество кластеров выявляют путем сортировки углов простирания и выявления кластеров отсортированных углов простирания, путем сортировки углов падения и выявления кластеров отсортированных углов падения, а также путем задания кластеров на основании кластеров отсортированных углов простирания и кластеров отсортированных углов падения.
Дополнительно или в качестве альтернативы, указанные и другие варианты осуществления настоящего изобретения могут содержать один или несколько из следующих признаков. Указанное количество кластеров представляет собой фиксированное значение, определенное независимо от ориентаций базовой плоскости. Каждое копланарное подмножество микросейсмических событий выявляют на основании данных о микросейсмических событий. При этом вычисляют вектор, нормальный к базовой плоскости, заданной каждым копланарным множеством. По нормальным векторам вычисляют ориентации базовой плоскости.
Дополнительно или в качестве альтернативы, указанные и другие варианты осуществления настоящего изобретения могут содержать один или несколько из следующих признаков. Выявление преобладающей ориентации трещины предусматривает выявление множества преобладающих ориентаций трещины. Выявление множества преобладающих ориентаций трещины предусматривает выявление кластеров, имеющих наибольшее количество плоскостей трещины. При этом выявляют кластер микросейсмических событий, связанных с каждой из преобладающих ориентаций трещины. В зависимости от степени соответствия (например, оптимального или другого) микросейсмических событий в кластере, для каждой преобладающей ориентации трещины выявляют преобладающую плоскость трещины.
Ниже приведено подробное описание одного или нескольких вариантов осуществления настоящего изобретения со ссылками на прилагаемые чертежи. Другие признаки, объекты и преимущества настоящего изобретения станут очевидными при рассмотрении нижеследующего описания и прилагаемых чертежей, а также формулы изобретения.
Краткое описание чертежей
На фиг. 1А представлена схема примерной скважинной системы, при этом на фиг. 1В представлена схема примерной компьютерной подсистемы 110 с фиг. 1А.
На фиг. 2 представлена диаграмма, иллюстрирующая примерную гистограмму.
На фиг. 3А и фиг. 3В в графическом виде представлена примерная ориентация плоскости трещины.
На фиг. 4 показана блок-схема примерного способа выявления преобладающих ориентаций трещины.
На фиг. 5 показана блок-схема примерного итерационного способа выявления кластеров значений ориентации.
На фиг. 6 показана блок-схема примерного динамического способа выявления кластеров значений ориентации.
На фиг. 7 показана блок-схема примерного способа обновления анализа, раскрытого в настоящем документе, на основании новых микросейсмических данных.
Одинаковые элементы на чертежах обозначены одинаковыми номерами позиций.
Осуществление изобретения
В некоторых аспектах раскрытого в настоящем документе изобретения, на основании микросейсмических данных выявляют параметры трещины, преобладающие ориентации трещины или другую информацию. В некоторых случаях, выявление указанных выше или других типов данных выполняют динамически, например, в режиме реального времени во время гидравлического разрыва пласта. Для многих приложений и способов анализа требуется выявление плоскостей трещины на основании происходящих в режиме реального времени микросейсмических событий, при этом плоскости отдельной трещины могут быть выведены на устройство отображения для того, чтобы проследить эволюцию во времени и геометрическое устранение, в том числе местонахождение, развитие, рост, сокращение или устранение плоскостей трещины. Такие возможности можно встроить в системы управления, программную часть, аппаратную часть или инструменты другого типа, имеющиеся в распоряжении инженеров нефтяных и газовых месторождений для анализа потенциала нефтяных и газовых месторождений в процессе стимулирования трещин гидравлического разрыва пласта и для анализа результирующих сигналов. Такие инструменты могут обеспечить надежный и непосредственный интерфейс для представления и визуализации динамики трещин гидравлического разрыва пласта, причем такой интерфейс может способствовать анализу сложности трещины, структуры сети трещин и геометрии коллектора. Такие инструменты могут способствовать оценке эффективности гидравлического разрыва пласта, например, путем улучшения, увеличения или оптимизации плотности расположения трещин гидравлического разрыва, а также длин и высот трасс. Такие улучшения процесса гидравлического разрыва пласта, применяемого в коллекторе, могут повысить добычу углеводородов или других ресурсов из коллектора.
Гидравлический разрыв пласта выполняют в любой подходящей подземной зоне. Гидравлический разрыв пласта часто применяют в малопроницаемых пластах с низкопроницаемыми коллекторами, в числе которых могут быть, например, обычные низкопроницаемые нефтяные и газовые коллекторы, непрерывные, бассейновые нефтегазоносные комплексы и сланцевые газовые коллекторы или пласты других типов. Гидравлический разрыв может вызвать в недрах искусственные трещины, которые позволяют повысить производительность коллектора по углеводородам.
При гидравлическом разрыве пласта, нагнетание флюидов под высоким давлением может изменять напряжения, накапливать напряжения сдвига, а также вызывать другие эффекты в строении геологического разреза. В некоторых случаях, с трещинами гидравлического разрыва, вызванными работами по образованию трещин, связаны микросейсмические события. Акустическую энергию или звуки, связанные с напряжением в горных породах, деформациями и трещинообразованием, можно обнаружить и собрать посредством датчиков. В некоторых случаях, микросейсмические события обладают малой энергией (например, значение логарифма интенсивности или моментной амплитуды менее трех), при этом с определением местонахождения указанного события связана некоторая неопределенность или систематическая погрешность или погрешность измерения. Неопределенность может быть описана, например, продолговатым трехмерным сфероидом, в котором наибольшее правдоподобие находится в центре сфероида, а наименьшее правдоподобие находится на его крае.
Для геометрического обнаружения местонахождения точки возбуждения колебаний микросейсмических событий на основании обнаруженных продольных и поперечных сейсмоволн можно использовать картирование микросейсмических событий. Обнаруженные продольные и поперечные сейсмоволны (например, р-волны и s-волны) могут обеспечить дополнительную информацию о микросейсмических событиях, в том числе, местонахождение пункта возбуждения колебаний, неопределенность измерения местонахождения и положения указанного события, время наступления указанного события, моментную магнитуду события, направление движения частиц и спектр испускаемой энергии и, возможно, прочее. Микросейсмические события можно контролировать в режиме реального времени, при этом при необходимости микросейсмические события можно также обрабатывать в режиме реального времени в ходе гидравлического разрыва пласта. В некоторых случаях, после выполнения гидравлического разрыва пласта, микросейсмические события, полученные в ходе указанного процесса, обрабатывают все вместе в качестве «ретроспективных данных».
Обработка данных микросейсмического события, собранных во время гидравлического разрыва пласта, может предусматривать привязку трещин (также называемую «картированием трещин»). Процессы привязки трещин позволяют выявить плоскости трещины в любой зоне на основании данных о микросейсмических событиях, собранных в указанной зоне. Некоторые примеры вычислительных алгоритмов привязки трещин используют данные (в частности, местонахождение события, неопределенность измерения местонахождения события, моментная амплитуда события) микросейсмических событий для выявления отдельных трещин, соответствующих собранному набору микросейсмических событий. Некоторые примеры вычислительных алгоритмов позволяют вычислять статистические свойства рисунков распространения трещин. Указанные статистические свойства могут включать в себя, например, ориентацию трещины, направленности ориентации трещины, размер (например, длину, высоту, площадь и т.д.) трещины, плотность расположения трещин, сложность трещины, свойства сети трещин и т.д. Некоторые вычислительные алгоритмы учитывают неопределенность местонахождения событий, используя множественные реализации местонахождений микросейсмических событий. Например, альтернативные статистические реализации, связанные со способом Монте-Карло, могут быть использованы для заданного распределения вероятностей на сфероиде или для другого типа распределения.
Как правило, алгоритмы привязки трещин могут работать с данными в режиме реального времени, с ретроспективными данными или с любыми сочетаниями данных указанных двух типов. Некоторые вычислительные алгоритмы привязки трещин работают только с ретроспективными данными. Алгоритмы, работающие с ретроспективными данными, можно использовать, когда в ходе гидравлического разрыва пласта было собрано какое-либо подмножество или несколько подмножеств подлежащих обработке микросейсмических данных; такие алгоритмы позволяет оценить (например, в виде исходных данных) полное подмножество подлежащих обработке микросейсмических событий. В некоторых вариантах осуществления настоящего изобретения, алгоритмы привязки трещин могут работать на данных, полученных в режиме реального времени. Такие алгоритмы можно использовать для автоматической привязки трещин в режиме реального времени во время гидравлического разрыва пласта. Алгоритмы, работающие с данными, полученными в режиме реального времени, можно использовать во время гидравлического разрыва пласта, причем такие алгоритмы способны адаптировать или динамически обновлять выявленную ранее модель трещин для отражения вновь полученных микросейсмических событий. Например, после того, как микросейсмическое событие было обнаружено и получено с поля, где выполняют гидравлический разрыв пласта, автоматический алгоритм привязки трещин, работающий в режиме реального времени, может отреагировать на указанное новое событие, в динамическом режиме выявляя и извлекая плоскости трещины на основании уже собранных микросейсмических событий в реальном масштабе времени. Некоторые вычислительные алгоритмы привязки трещин могут работать с комбинированными ретроспективными данными и данными, полученными в режиме реального времени.
В некоторых случаях, алгоритмы картирования трещин выполнены с возможностью урегулирования условий, возникающих при обработке микросейсмических данных в режиме реального времени. Например, в масштабе реального времени могут возникать трудности или условия нескольких типов. В некоторых случаях, способы обработки в режиме реального времени могут быть выполнены с возможностью учета (или уменьшения или предотвращения) пониженной точности, которая иногда сопряжена с трещинами и получена из массивов данных, в которых не хватает достаточного количества микросейсмических событий или не хватает достаточного количества микросейсмических событий в конкретных частях домена. Некоторые способы обработки в режиме реального времени могут быть выполнены с возможностью выдачи данных о трещине, которые согласуются с данными о трещине, которые могут быть получены способами обработки ретроспективных данных. Например, некоторые из раскрытых в настоящем документе примерных способов обработки в режиме реального времени выдали результаты, которые согласно проверке статистической гипотезы (t-критерий Стьюдента и F-критерий Фишера), оказались статистически одинаковыми с результатами, полученными способами ретроспективной обработки тех же самых данных.
В некоторых случаях, способы обработки в режиме реального времени могут быть выполнены с возможностью легко (например, мгновенно, с точки зрения пользователя) предлагать пользователям данные о выявленной трещине. Такие особенности могут позволить промысловым инженерам или операторам динамически получать информацию о геометрии трещины и регулировать по мере необходимости параметры процесса гидравлического разрыва пласта (например, для улучшения, усиления, оптимизации или какого-либо другого изменения указанного процесса). В некоторых случаях, данные о плоскости трещины динамически извлекают из микросейсмических данных и выводят для просмотра промысловыми инженерами в режиме реального времени. Способы обработки в режиме реального времени могут отличаться высокой производительностью. В некоторых случаях, производительность можно повысить посредством технологии параллельных вычислений, технологии распределенных вычислений, способов с параллельными потоками, быстрых алгоритмов двоичного поиска или сочетания вышеперечисленных и других аппаратных и программных решений, способствующих работе в режиме реального времени.
В некоторых вариантах осуществления настоящего изобретения, способ привязки трещины может напрямую предоставлять информацию о плоскостях трещин, связанных с трехмерными микросейсмическими событиями. Представленные плоскости трещин могут отображать сети трещин, отличающиеся множественными ориентациями и активирующие сложные рисунки трещин. В некоторых случаях, параметры гидравлического разрыва пласта извлекают из облака данных микросейсмического события, при этом к таким параметрам относятся, например, направленности ориентации трещины, плотность расположения и сложность трещин. Информация о параметрах трещины может быть предоставлена промысловым инженерам или операторам, например, на табличном, цифровом или графическом интерфейсе или на интерфейсе, объединяющем в себе табличные, цифровые и графические элементы. Графический интерфейс может быть представлен в режиме реального времени и может показывать динамику трещин гидравлического разрыва в режиме реального времени. В некоторых случаях, это может помочь промысловым инженерам анализировать сложность трещин, сеть трещин и геометрию коллектора, или это может помочь им лучше понимать процесс гидравлического разрыва пласта по ходу его выполнения.
В некоторых вариантах осуществления настоящего изобретения, для количественного выражения достоверности извлеченных из микросейсмических данных плоскостей используют значения достоверности точности. Значения достоверности точности можно использовать для классификации трещин по уровням достоверности. Например, в некоторых случаях, целесообразно использовать три уровня достоверности (низкий уровень, средний уровень и высокий уровень достоверности), в то время как в других случаях может быть целесообразным использовать другое число (например, два, четыре, пять и т.д.) уровней достоверности. Значение достоверности точности трещины для плоскости трещины может быть рассчитано на основании любых пригодных для этого данных. В некоторых вариантах осуществления настоящего изобретения значение достоверности точности для плоскости трещины рассчитывают, кроме всего прочего, на основании неопределенностей местонахождения и положения микросейсмического события, на основании моментной магнитуды отдельных микросейсмических событий, на основании расстояния между отдельными событиями и их поддерживающей плоскости трещины, на основании количества поддерживающих событий, связанных с плоскостью трещины, и на основании веса изменчивости ориентации трещины или на основании других параметров.
Значения достоверности точности можно рассчитать, а плоскости трещины можно классифицировать в любое подходящее время. В некоторых случаях, значения достоверности точности рассчитывают, а плоскости трещины классифицируют в режиме реального времени в ходе выполнения гидравлического разрыва пласта. Плоскости трещины могут быть предоставлены пользователю в любое подходящее время и в любом пригодном формате. В некоторых случаях, плоскости трещины предоставляют графически на пользовательском интерфейсе в режиме реального времени в соответствии с уровнями достоверности точности или в соответствии с любым другим типом классификации. В некоторых случаях, пользователи имеют возможность выбирать для просмотра или анализа отдельные группы или отдельные плоскости (например, те, что имеют высокие уровни достоверности). Плоскости трещины могут быть предоставлены пользователю в алгебраическом формате, в цифровом формате, в графическом формате или в сочетании вышеуказанных и других форматов.
В некоторых вариантах осуществления настоящего изобретения, микросейсмические события контролируют в режиме реального времени в ходе выполнения гидравлического разрыва пласта. По мере того, как события контролируются, их также можно обрабатывать в режиме реального времени, их можно обрабатывать позже в качестве ретроспективных данных, или их можно обрабатывать, сочетая обработку в режиме реального времени и постобработку.
События можно обрабатывать любым пригодным способом. В некоторых случаях, события обрабатывают по отдельности, в порядке их поступления. Например, состояние S(M,N-1) системы можно использовать для отображения М трещин, возникающих при N-1 предшествующими событиями. Вновь наступившее N-ое событие может запустить состояние S(M,N-1) системы. В некоторых случаях, при получении N-го события генерируют гистограмму или распределение кластеров. Например, для выявления вероятных преобладающих ориентаций, заложенных во множествах трещин, можно генерировать гистограмму распределения вероятностей или гистограмму преобразования Хафа вырожденных плоскостей в домене значений углов простирания и падения.
Базовая плоскость может быть сгенерирована из подмножества микросейсмических событий. Например, любые три неколлинеарные точки в пространстве математически задают базовую плоскость. Базовая плоскость, заданная тремя неколлинеарными микросейсмическими событиями, может быть отображена нормальным вектором (а, b, с). Нормальный вектор (a, b, с) может быть вычислен по положениям трех событий. Ориентацию базовой плоскости можно вычислить по нормальному вектору. Например, угол θ падения и угол φ простирания могут быть выражены следующим образом:

Угол θ падения плоскости трещины может отображать угол между плоскостью трещины и горизонтальной плоскостью (например, плоскостью ху). Угол φ простирания плоскости трещины может отображать угол между горизонтальной осью (например, осью х) координат и горизонтальной линией, по которой плоскость трещины пересекает горизонтальную плоскость. Например, угол простирания может быть задан относительно северного направления или относительно любого другого начального направления. Плоскость трещины может быть задана другими параметрами, в том числе параметрами, отличными от угла простирания и угла падения.
В общем случае, N событий могут поддерживать Р базовых плоскостей, где Р=N(N-1)(N-2)/6 углов простирания и падения. На основании углов ориентации можно построить вероятностную гистограмму. Вероятностная гистограмма или гистограмма расширенного преобразования Хафа может иметь любую подходящую конфигурацию. Например, конфигурация гистограммы может быть основана на фиксированном размере интервала и фиксированном количестве интервалов, естественном оптимальном размере интервалов в домене значений углов простирания и падения, или на интервалах других типов. Гистограмма может быть основана на любом подходящем числе микросейсмических событий (например, на десятке, сотне, тысяче и т.д.) и на любом подходящем диапазоне ориентаций. В некоторых случаях, для гистограммы задают множественные дискретные интервалы, при этом каждый интервал отображает дискретный диапазон ориентаций. Количество базовых плоскостей в каждом дискретном диапазоне можно вычислить по базовым плоскостям. В некоторых случаях, ориентация каждой базовой плоскости попадает в диапазон ориентаций, связанный с одним из интервалов. Например, для N микросейсмических событий, каждая из Ρ базовых плоскостей может быть отнесена к интервалу, при этом количество базовых плоскостей, отнесенных к каждому интервалу, можно вычислить. Рассчитанное для каждого интервала количество может иметь любое подходящее значение. Например, количество может быть ненормализованным числом базовых плоскостей, количество может быть нормализованной вероятностью, частотой, или фракцией базовых плоскостей, или же количество может быть значением другого типа, подходящего для гистограммы. Гистограмму можно сгенерировать для отображения количества базовых плоскостей, отнесенных ко всем интервалам, или же для отображения количества базовых плоскостей, отнесенных к подмножеству интервалов.
В некоторых примерах, гистограмму представляют в виде трехмерной столбчатой диаграммы, трехмерной топографической карты или в виде другого подходящего графического изображения в подходящей для этого системе координат. Вершины на графическом изображении гистограммы могут указывать на преобладающие ориентации трещины. Например, по одной оси на гистограмме могут быть отображены углы простирания от 0° до 360° (или другой диапазон углов), причем указанный диапазон углов простирания может быть разделен на любое подходящее количество интервалов; по другой оси на гистограмме могут быть отображены углы падения от 60° до 90° (или другой диапазон углов), причем указанный диапазон углов падения может быть разделен на любое подходящее количество интервалов. Количественное значение (например, вероятность) для каждого интервала может быть отображено по третьей оси гистограммы. Полученное графическое изображение может содержать локальные максимумы (вершины). Каждый локальный максимум (вершина) может указывать на соответствующие угол простирания и угол падения, которые отображают преобладающую ориентацию трещины. Например, локальный максимум гистограммы может указывать на то, что вдоль этого направления (или диапазона направлений), выровнено большее число базовых плоскостей, чем вдоль соседних направлений, а также может указывать на то, что указанные базовые плоскости либо почти параллельны, либо находятся по существу на одной плоскости.
Диапазон ориентаций, отображаемый каждым интервалом гистограммы, может быть определен любым пригодным способом. В некоторых случаях, каждый интервал представляет предварительно заданный диапазон ориентаций. Например, может быть использован способ фиксированного размера интервала. В некоторых случаях, диапазон или размер для каждого интервала вычисляют на основании данных, которые отображаются гистограммой. Например, может быть использован способ естественного оптимального размера интервала. В некоторых случаях, ориентации базовой плоскости сортируют, после чего выявляют кластеры сортированных ориентаций. Например, все углы простирания можно сортировать в убывающем или возрастающем порядке, а затем группировать их в кластеры; аналогичным образом, все значения углов падения можно сортировать в убывающем или возрастающем порядке, а затем группировать их в кластеры. Кластеры можно связывать с двухмерной сеткой, при этом можно рассчитать число базовых плоскостей в каждой ячейке сетки. В некоторых случаях, такой способ позволяет сгенерировать адаптивные и динамические кластеры, что обеспечивает высокоточные значения для преобладающих ориентаций. Указанный способ и связанные с ним уточнения могут быть реализованы с вычислительной сложностью N3log(N). В некоторых случаях, размеры интервалов как для углов простирания, так и для углов падения являются фиксированными, при этом ячейка сетки местонахождения каждой базовой плоскости может быть однозначно определена посредством связанных с ней углов простирания и углов падения с вычислительной сложностью N3.
Плоскости трещины, связанные с множеством микросейсмических событий, могут быть получены из преобладающих ориентаций, заложенных в гистограммных данных. Базовые плоскости, поддерживающие преобладающую ориентацию (θ, φ), могут либо быть почти параллельными, либо находиться в одной и той же плоскости. Базовые плоскости, расположенные в пределах одной и той же плоскости, можно объединить друг с другом с формированием новой плоскости трещины с более сильной поддержкой (например, отображающей большее число микросейсмических событий). Для объединения плоскостей трещины друг с другом может быть использован любой подходящий для этого способ. В некоторых случаях, для каждой преобладающей ориентации (θ, φ), строят нормальный к плоскости вектор с компонентами (sin θ cos φ, sin θ sin φ, cos θ). В некоторых случаях, результаты являются нечувствительными к местонахождению плоскости и без потери общности, при этом плоскость можно построить из указанного нормального вектора (например, допуская, что его начало находится в указанной плоскости). Плоскость можно описать как x sin θ cos φ + y sin θ sin φ + z cos θ = 0. Нормальное имеющее знак расстояние каждого события (х0, у0, z0) от базовой плоскости до построенной плоскости может быть представлено как d = -(х0 sin θ cos φ + y0 sin θ sin φ + x0cos θ). В данном представлении, события с противоположными знаками d расположены с противоположных сторон плоскости.
В некоторых случаях, микросейсмические события группируют в кластеры в соответствии с их расстоянием от построенных плоскостей трещины. Например, кластер событий может содержать группу событий, наиболее близких к построенной плоскости трещины. То есть, каждый кластер микросейсмических событий может поддерживать конкретную плоскость трещины. Размер кластера относится к числу событий, которые он содержит. В некоторых случаях, введенные пользователем данные или другие данные программы могут назначать минимальное число событий в сохраняемом кластере. Минимальный размер кластера может зависеть от числа микросейсмических событий в данных. В некоторых случаях, минимальный размер кластера должен быть больше или равен трем. Например, кластеры, имеющие размер, который больше или равен минимальному размеру кластера, могут считаться допустимыми плоскостями трещины. К значениям местонахождения и неопределенности местонахождения событий в каждом кластере может быть применен алгоритм подгонки для нахождения их соответствующих плоскостей трещины.
Для выявления плоскости трещины из множества микросейсмических событий может быть использован любой подходящий способ. В некоторых случаях используют способ подгонки Хи-квадрат. Для заданных экспериментальных К микросейсмических событий местонахождения можно представить как (xi, yi, zi), а неопределенности их измерения можно представить как (σi,x, σi,y, σi,Z), где 1≤i≤K. Можно рассчитать параметры модели z=ах+by+с плоскости, например, путем минимизации оценочной функции Хи-квадрат.

Оценочная функция Хи-квадрат может быть решена любым подходящим способом. В некоторых случаях, решение можно получить, решив три уравнения, являющиеся частными производными χ2(а, b, с) относительно их переменных, где каждую частную производную сводят к нулю. В некоторых случаях, для такой нелинейной математической системы уравнений аналитического решения не имеется. Для нахождения параметров а, b, с и вычисления углов простирания и падения (например, с использованием уравнения (1), представленного выше) могут быть применены численные способы (например, численный способ Ньютона, способ Ньютона-Рафсона, способ сопряженных градиентов, или другой способ). Ориентация преобладающей плоскости трещины, вычисленная по микросейсмическим событиям, может быть такой же или может немного отличаться от ориентации преобладающей плоскости трещины, выявленной по гистограмме.
В некоторых вариантах осуществления настоящего изобретения, алгоритм выполняет итерации по всем возможным преобладающим ориентациям для раскрытия всех вероятных плоскостей трещин. В некоторых случаях, алгоритм выполняет итерации по выбранному подмножеству возможных преобладающих ориентаций. Итерации могут сходиться к плоскостям. Некоторые плоскости могут быть точно равными друг другу, а некоторые могут быть близкими друг другу. Две плоскости могут считаться «близкими друг другу», например, когда среднее расстояние событий одной плоскости от другой плоскости меньше заданного порогового значения. Пороговое расстояние можно задавать, например, в качестве параметра управления. Алгоритм может объединять близкие плоскости друг с другом, при этом поддерживающие события одной плоскости можно связывать с поддерживающими событиями другой плоскости (плоскостей), с которой было выполнено объединение.
В некоторых случаях, на плоскости трещины, выявленные на основании микросейсмических данных, накладывают ограничения. Например, в некоторых случаях, невязка расстояния событий должна быть меньше заданного допустимого расстояния. Указанное допустимое расстояние можно задавать, например, в качестве параметра управления. В некоторых случаях, для отображения конечного размера трещины требуется должным образом усечь выявленные плоскости трещины. Граница усеченных плоскостей может быть рассчитана по неопределенностям измерения положения и местонахождения поддерживающих событий. Новые конечно-размерные плоскости трещин можно объединить с уже выявленными трещинами.
В некоторых случаях, вновь наступившее N-e микросейсмическое событие связывают с плоскостями трещины, уже выявленными на основании предшествующих N-1 микросейсмических событий. После связывания нового события с существующей трещиной, можно использовать алгоритм обновления существующей трещины. Например, обновление трещины может изменить геометрию трещины, местонахождение, ориентацию или другие параметры. После выбора одной из предварительно выявленных плоскостей трещин, можно рассчитать расстояние плоскости трещины от нового события. Если указанное расстояние меньше или равно параметру управления расстоянием, то новое событие можно добавить к множеству поддерживающих событий плоскости трещины. Если расстояние превышает параметр управления расстоянием, то можно выбирать (например, итеративно или рекурсивно) другие предварительно выявленные плоскости трещины до тех пор, пока не будет найдена плоскость, находящаяся на расстоянии в пределах порогового значения. После того, как новое событие добавляют к поддерживающему множеству для плоскости трещины, для указанной плоскости можно оценить новые значения углов простирания и падения и, при необходимости, пересчитать их (например, используя способ подгонки Хи-квадрат или другой статистический или детерминистический способ). Обычно, перерасчет параметров трещины приводит к ограниченным изменениям в ориентации из-за управления расстоянием по заданному условию.
В некоторых случаях, когда новое микросейсмическое событие связывают с плоскостью трещины, можно модифицировать или оптимизировать один или несколько параметров (например, невязку расстояния, площадь и т.д.). Невязка r расстояния плоскости может отображать среднее расстояние поддерживающих событий до плоскости. Если невязка расстояния меньше заданной допустимой невязки Т, то новое событие может быть помечено как относящееся к множеству связанных с плоскостью событий. В некоторых случаях, запускают дополнительный процесс, посредством которого другие связанные события поддерживающего множества извлекают из списка, при этом указанный процесс завершают тогда, когда невязка r расстояния находится в пределах заданного допустимого значения Т. Площадь плоскости трещины может отображать размер плоскости трещины. Опыт показывает, что обычно новое событие приводит к распространению плоскости трещины в длину, увеличению ее по высоте или к тому и другому. Указанный вычислительный процесс может быть ограничен условием неуменьшающейся площади, по которому при добавлении к плоскости нового события площадь новой плоскости должна увеличиваться или оставаться равной площади исходной плоскости (но не уменьшаться).
Ориентация плоскости трещины может отображать угол плоскости трещины. Например, для отображения ориентации плоскости трещины можно использовать нормальный вектор, углы простирания и падения, или другие пригодные для этого параметры. Изменение ориентации плоскости трещины (или другие изменения плоскости трещины) могут приводить к тому, что некоторые связанные поддерживающие события будут удалены из списка связанных событий и перенесены в список несвязанных событий в соответствии с критерием их удаленности от обновленной плоскости трещины. Дополнительно или в качестве альтернативы, изменение в ориентации плоскости трещины может привести к тому, что некоторые предварительно не связанные события будут отнесены к плоскости трещины в соответствии с критерием их близости к обновленной плоскости трещины. Дополнительно, некоторые из событий, связанных с близлежащими плоскостями, могут также быть связанными с рассматриваемой плоскостью. Если новое событие связано с двумя плоскостями трещины, то плоскости трещины могут пересекать друг друга. В некоторых случаях, пересекающиеся плоскости могут быть объединены. Если новое событие не принадлежит к какой-либо существующей плоскости трещины, то оно может быть отнесено к списку «несвязанных событий».
N накопленных микросейсмических событий в любой точке могут считаться подмножеством финального множества ретроспективных данных. В таких случаях, гистограмма или распределение ориентаций, построенные на основании N первых событий, могут отличаться от гистограммы или распределения ориентаций, построенных на основании финальных ретроспективных данных. Некоторые плоскости трещины, извлеченные из N микросейсмических событий, могут быть неточными, при этом такая неточность может уменьшаться с течением времени и по мере накопления большего числа событий. Например, точность и достоверность могут быть ниже в начальное время, когда обнаруженные плоскости трещины связываются с микросейсмическими событиями, расположенными близко к скважинному стволу. Такие данные могут указывать на плоскости трещины, которые почти параллельны скважинному стволу, даже если указанные плоскости не отображают реально существующие трещины.
Достоверность точности трещины можно использовать для измерения несомненности, связанной с плоскостями трещины, выявленными по микросейсмическим данным. В некоторых случаях, достоверность точности выявляют в режиме реального времени в ходе выполнения гидравлического разрыва пласта. Достоверность точности можно определить по любым пригодным данным с использованием любых пригодных способов вычисления. В некоторых случаях, на значение достоверности точности для плоскости трещины влияет количество микросейсмических событий, связанных с плоскостью трещины. Например, значение достоверности точности можно масштабировать (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) по количеству микросейсмических событий в соответствии с заданной функцией. Количество микросейсмических событий, связанных с плоскостью трещины, может быть введено (например, в виде веса, экспоненты и т.д.) в уравнение для вычисления достоверности точности. В некоторых случаях, плоскость трещины имеет большее значение достоверности точности, когда плоскость трещины поддерживается большим количеством точек микросейсмических данных (и меньшее значение достоверности точности, когда плоскость трещины поддерживается меньшим количеством точек микросейсмических данных).
В некоторых случаях, на значение достоверности точности для плоскости трещины влияет неопределенность местонахождения микросейсмических событий, связанных с плоскостью трещины. Например, значение достоверности точности можно масштабировать (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) по неопределенности местонахождения микросейсмического события в соответствии с заданной функцией. Неопределенность местонахождения микросейсмического события может быть введена (например, в виде веса, экспоненты или затухающей функции расстояния и т.д.) в уравнение для вычисления достоверности точности. В некоторых случаях, плоскость трещины имеет большее значение достоверности точности, когда плоскость трещины поддерживается точками микросейсмических данных, имеющими более низкую неопределенность (и меньшее значение достоверности точности, когда плоскость трещины поддерживается точками микросейсмических данных, имеющими более высокую неопределенность).
В некоторых случаях, на значение достоверности точности для плоскости трещины влияет моментная магнитуда микросейсмических событий, связанных с плоскостью трещины. Например, значение достоверности точности можно масштабировать (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) по моментной магнитуде микросейсмического события в соответствии с заданной функцией. Моментная магнитуда микросейсмического события может быть введена (например, в виде веса, экспоненты и т.д.) в уравнение для вычисления достоверности точности. Моментная амплитуда микросейсмического события может относиться к энергии или интенсивности (иногда пропорциональной квадрату амплитуды) события. Например, моментная магнитуда микросейсмического события может быть логарифмическим значением энергии или интенсивности, или значением другого типа, отображающим энергоинтенсивность. В некоторых случаях, плоскость трещины имеет большее значение достоверности точности, когда плоскость трещины поддерживается точками микросейсмических данных, имеющими более высокую интенсивность (и меньшее значение достоверности точности, когда плоскость трещины поддерживается точками микросейсмических данных, имеющими более низкую интенсивность).
В некоторых случаях, на значение достоверности точности для плоскости трещины влияет расстояние между плоскостью трещины и микросейсмическими событиями, связанными с плоскостью трещины. Например, значение достоверности точности можно масштабировать (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) по среднеарифметическому расстоянию между плоскостью трещины и микросейсмическими событиями, поддерживающими плоскость трещины. Среднеарифметическое расстояние может быть введено (например, в виде веса, экспоненты и т.д.) в уравнение для вычисления достоверности точности. В некоторых случаях, плоскость трещины имеет большее значение достоверности точности, когда плоскость трещины поддерживается точками микросейсмических данных, находящимися в среднем ближе к плоскости трещины (и меньшее значение достоверности точности, когда плоскость трещины поддерживается точками микросейсмических данных, находящимися в среднем дальше от плоскости трещины).
В некоторых случаях, на значение достоверности точности для плоскости трещины влияет ориентация плоскости трещины относительно направленности преобладающей ориентации во множестве микросейсмических данных. Например, значение достоверности точности можно масштабировать (например, линейно, нелинейно, экспоненциально, полиномиально и т.д.) по угловому расхождению между ориентацией плоскости трещины и направленностью преобладающей ориентации в микросейсмических данных. Углы ориентации могут включать в себя угол простирания, угол падения или любое подходящее сочетание (например, трехмерный телесный угол). Ориентация может быть введена (например, в виде веса, экспоненты и т.д.) в уравнение для вычисления достоверности точности. Множество микросейсмических данных может иметь одну направленность преобладающей ориентации или множественные направленности преобладающих ориентаций. Направленности преобладающих ориентаций можно классифицировать, например, как первичные, вторичные и т.д. В некоторых случаях, плоскость трещины имеет более высокое значение достоверности, когда плоскость трещины выровнена с направленностью преобладающей ориентации во множестве микросейсмических данных (или более низкое значение достоверности, когда плоскость трещины отклонена от направленности преобладающей ориентации в множестве микросейсмических данных).
Весовое значение, называемое «вес изменчивости ориентации трещины» может отображать угловое расхождение между ориентацией плоскости трещины и направленностью преобладающей ориентации в микросейсмических данных. Вес изменчивости ориентации трещины может быть скалярной величиной, имеющей максимальное значение, когда плоскость трещины выровнена с направленностью преобладающей ориентации. Вес изменчивости ориентации трещины может иметь минимальное значение для ориентаций трещины, максимально расходящихся с направленностью преобладающей ориентации трещины. Например, когда имеется одна направленность преобладающей ориентации трещины, вес изменчивости ориентации трещины может быть нулевым для трещин, перпендикулярных (или нормальных к) преобладающей ориентации трещины. Другим примером может быть ситуация, когда существуют множественные направленности преобладающей ориентации трещины, и вес изменчивости ориентации трещины может быть нулевым для трещин, имеющих ориентации, промежуточные между преобладающими ориентациями трещин. Вес изменчивости ориентации трещины может представлять собой отношение вычисленной ориентации трещины к ориентации, отраженной гомогенным случаем.
В некоторых случаях, когда имеются множественные направленности преобладающих ориентаций трещины, вес изменчивости ориентации трещины имеет одно и то же максимальное значение для каждой направленности преобладающей ориентации трещины. В некоторых случаях, когда имеются множественные преобладающие ориентации трещины, вес изменчивости ориентации трещины имеет отличающееся от других локальное максимальное значение для каждой преобладающей ориентации трещины. Например, вес изменчивости ориентации трещины может составлять 1,0 для трещин, параллельных первой направленности преобладающей ориентации трещины, 0,8 для трещин, параллельных второй направленности преобладающей ориентации трещины и 0,7 для трещин, параллельных третьей направленности преобладающей ориентации трещины. Вес изменчивости ориентации трещины может уменьшаться до локального минимума между направленностями преобладающих ориентаций трещины. Например, вес изменчивости ориентации трещины между каждой парой преобладающих ориентаций трещины может задавать локальный минимум посередине между преобладающими ориентациями трещины, или в другой точке между преобладающими ориентациями трещины.
На параметр достоверности точности может влиять неопределенность местонахождения поддерживающих микросейсмических событий, моментная магнитуда поддерживающих микросейсмических событий, расстояние между поддерживающими микросейсмическими событиями и плоскостью трещины, количество поддерживающих событий, связанных с плоскостью, вес изменчивости ориентации трещины, другие величины или любое пригодное сочетание одного или нескольких из вышеперечисленных параметров. В некоторых обобщенных моделях, достоверность увеличивается по мере увеличения моментной магнитуды, увеличения изменчивости ориентации трещины, увеличения количества поддерживающих событий и увеличения точности их местонахождения, и по мере увеличения веса изменчивости как функции расстояния. Указанные факторы можно использовать в качестве исходных данных для определения веса в уравнении достоверности точности. Например, в некоторых моделях, веса являются линейными или нелинейными функциями указанных факторов, причем вес изменчивости ориентации трещины может оказаться имеющим больший вес по влиянию на достоверность трещины. В некоторых примерах, достоверность точности рассчитывают следующим образом:

Для вычисления достоверности можно использовать другие уравнения или алгоритмы.
Выявленные плоскости трещины можно классифицировать по уровням достоверности, используя значения достоверности точности плоскостей трещины. В некоторых случаях используют три уровня: низкий уровень достоверности, средний уровень достоверности и высокий уровень достоверности. Можно использовать любое подходящее количество уровней достоверности. В некоторых примерах, когда новое событие добавляют к поддерживающем множеству, связанному с существующей плоскостью трещины, параметр достоверности трещины, связанный с указанной плоскостью, может увеличиться, что может привести к тому, что плоскость трещины переместиться со своего текущего уровня достоверности на более высокий уровень, если таковой существует. Другим примером может быть ситуация, когда в случае отклонения ориентации трещины в сторону от направленности ориентаций, демонстрируемых ретроспективными данными микросейсмических событий, по мере постепенного накопления микросейсмических событий может произойти уменьшение достоверности трещины, главным образом, за счет веса изменчивости ориентации трещины, что приведет к перемещению плоскости на более низкий уровень достоверности, если таковой существует. Это, в частности, может относиться к трещинам, созданным в самом начале процесса гидравлического разрыва пласта. Это также может относиться к трещинам других типов в других контекстах.
Пользователям (промысловым инженерам, эксплуатационным инженерам, аналитикам и другим пользователям) может быть обеспечен графический вывод на устройство отображения плоскостей трещины, выявленных на основании микросейсмических данных. В некоторых случаях, графический вывод позволяет пользователю визуализировать выявленные плоскости в режиме реального времени, в графических панелях, представляющих уровни достоверности. Например, для раздельного представления плоскостей низкого, среднего и высокого уровня достоверности можно использовать три графические панели. В некоторых случаях, плоскости более низкого уровня достоверности создаются в начале процесса гидравлического разрыва пласта. В некоторых случаях, плоскости более высокого уровня достоверности развиваются во времени в направлении, по существу перпендикулярном к скважинному стволу. По мере того, как новые микросейсмические события постепенно накапливаются с течением времени, графический вывод можно обновлять, чтобы пользователи могли в динамике наблюдать связи плоскостей трещины на разных уровнях достоверности, связанных с разными графическими панелями.
Группы по уровням достоверности могут быть представлены в виде графических изображений плоскостей трещин, или же в другом формате. Группы по уровням достоверности могут быть представлены алгебраически, например, путем демонстрации алгебраических параметров (например, параметров для уравнения плоскости) плоскостей трещины в каждой группе. Группы по уровням достоверности могут быть представлены в числовой форме, например, путем демонстрации численных параметров (таких как угол простирания, угол падения, площадь и т.д.) плоскостей трещины в каждой группе. Группы по уровням достоверности могут быть представлены в табличной форме, например, путем предоставления таблицы алгебраических или численных параметров плоскостей трещины в каждой группе. Кроме того, плоскость трещины может быть представлена графически в трехмерном пространстве, двухмерном или другом пространстве. Например, плоскость трещины может быть представлена в прямоугольной системе координат (например, в координатах х, у, z), в полярной координатной системе (например, в координатах r, θ, φ) или в другой системе координат. В некоторых примерах, плоскость трещины может быть представлена в виде линии на пересечении плоскости трещины с другой плоскостью (например, линия в плоскости ху, линия в плоскости xz, линия в плоскости yz, или линия в любой произвольно выбранной плоскости или поверхности).
В некоторых случаях, графическое отображение позволяет пользователям отслеживать и визуализировать пространственную и временную эволюцию конкретных плоскостей трещины, в том числе их создание, развитие и рост. Например, пользователь может наблюдать этапы пространственной и временной эволюции конкретной плоскости трещины, например, изначально выявляя плоскость трещины по трем микросейсмическим событиям, новому событию, изменяющему ориентацию плоскости, новому событию, вызывающему рост площади трещины (например, по вертикали, по горизонтали, или по обоим указанным направлениям), или другие этапы эволюции плоскости трещины. Пространственная и временная эволюция плоскостей трещины может представлять пути движения стимулируемых флюидов и расклинивающих агентов, нагнетаемых в скелет горной породы. Визуализация плоскостей трещин в динамике может помочь пользователям лучше понять процесс гидравлического разрыва, более точно анализировать сложность трещины, оценивать эффективность гидравлического разрыва и улучшать эксплуатационные показатели скважины.
Хотя в настоящем документе описаны примеры с привлечением данных о микросейсмических событиях, раскрытые в настоящем документе способы и системы могут быть применены к данным других типов. Например, раскрытые в настоящем документе способы и системы можно использовать для обработки множеств данных, включающих в себя элементы данных, не относящиеся к микросейсмическим событиям, причем указанные элементы данных могут включать в себя другие типы физических данных, связанных с подземной зоной. В некоторых аспектах, настоящее изобретение обеспечивает основу для обработки больших объемов данных, причем указанная основа может быть адаптирована для разнообразных приложений, конкретно не описанных в настоящем документе. Например, раскрытые в настоящем документе способы и системы можно использовать для анализа пространственных координат, данных по ориентации или других типов информации, полученной из любого источника. Например, можно собрать образцы почвы и породы (например, в процессе бурения) и выявить концентрацию заданного соединения (например, конкретной «соли») в зависимости от местонахождения. Это может помочь геологам и диспетчерам в оценке строения недр.
На фиг. 1А схематично показана примерная скважинная система 100 с компьютерной подсистемой 110. Приведенная в качестве примера скважинная система 100 содержит рабочую скважину 102 и наблюдательную скважину 104. Указанная наблюдательная скважина 104 может быть расположена на удалении от указанной рабочей скважины 102, вблизи указанной рабочей скважины 102 или в любом подходящем месте. Указанная скважинная система 100 может содержать одну или несколько дополнительных рабочих скважин, наблюдательных скважин или скважин другого типа. Указанная компьютерная подсистема 110 может содержать одно или несколько компьютерных устройств или систем, расположенных на рабочей скважине 102, наблюдательной скважине 104 или в других местах. Указанная компьютерная подсистема 110 или любой из ее компонентов может быть расположен вдали от других показанных на фиг. 1А компонентов. Например, компьютерная система 110 может быть расположена в центре обработки данных, в вычислительном центре или в другом подходящем месте. Указанная скважинная система 110 может содержать дополнительные или другие элементы, причем элементы скважинной системы могут быть скомпонованы, как показано на фиг. 1А, или в любой другой подходящей конфигурации.
Приведенная в качестве примера рабочая скважина 102 содержит скважинный ствол 101 в подземной зоне 121 под поверхностью 106. Указанная подземная зона 121 может содержать один и меньше одного пласта горных пород, или же подземная зона 121 может содержать больше одного пласта горных пород. В показанном на фиг. 1А примере подземная зона 121 содержит разнообразные подповерхностные слои 122. Указанные подповерхностные слои 122 могут быть заданы геологическими или другими свойствами подземной зоны 121. Например, каждый из подповерхностных слоев 122 может соответствовать конкретной литологии, конкретному содержанию флюида, конкретному профилю напряжения или давления или любой другой подходящей характеристике. В некоторых случаях, один или более подповерхностных слоев 122 могут представлять собой коллекторами флюида, содержащими углеводороды или флюиды других типов. Подземная зона 121 может содержать любой пригодный пласт горных пород. Например, один или более подповерхностных слоев 122 могут содержать песчаник, карбонатный материал, сланец, уголь, аргиллит, гранит или другие материалы.
Приведенная в качестве примера рабочая скважина 102 содержит подсистему 120 нагнетательной обработки, которая включает в себя приборные автомобили 116, насосные автомобили 114 и другую технику. Подсистема 120 нагнетательной обработки может применить нагнетательную обработку к подземной зоне 121 через скважинный ствол 101. Нагнетательная обработка может представлять собой гидравлический разрыв пласта, создающий трещины в подземной зоне 121. Например, нагнетательная обработка может создавать, развивать или открывать трещины в одном или нескольких подповерхностных слоях 122. Нагнетательная обработка может включать в себя мини гидравлический разрыв пласта для испытания на излом, нормальный или полный гидравлический разрыв пласта, доработочный гидравлический разрыв пласта, завершающий гидравлический разрыв пласта или гидравлический разрыв пласта другого типа.
В ходе выполнения гидравлического разрыва пласта в подземную зону 121 можно нагнетать технологический флюид с любым подходящим давлением и расходом флюида. Флюид можно нагнетать с давлением зарождения трещины, с давлением, выше давления зарождения трещины, с давлением ниже давления зарождения трещины, с давлением, равным давлению смыкания трещины или большим или меньшим указанного давления, или же при любом уместном сочетании указанных и прочих давлений флюида. Давлением зарождения трещины для пласта является минимальное давление нагнетания флюида, которое инициировать или развить в пласте искусственные трещины. Применение гидравлического разрыва пласта может привести, а может и не привести к инициированию или развитию искусственных трещин в пласте. Давлением закрытия трещины для пласта является минимальное давление нагнетания флюида, которое может расширить существующие трещины в подземной формации. Применение гидравлического разрыва пласта может привести, а может и не привести к расширению искусственных трещин в пласте.
Гидравлический разрыв пласта можно применять посредством любой подходящей системы, с использованием любого подходящего способа. Автомобильные насосные установки 114 могут включать в себя мобильные транспортные средства, стационарные установки, салазки, рукава, трубы, баки или резервуары для флюида, насосы, запорную арматуру или другие подходящие конструкции и технику. В некоторых случаях автомобильные насосные установки 114 подсоединены к рабочей колонне, расположенной в скважинном стволе 101. В ходе выполнения работ, автомобильные насосные установки 114 могут нагнетать флюид через рабочую колонну и в подземную зону 121. Нагнетаемый флюид может содержать подушку, расклинивающие агенты, промывной флюид, присадки или другие материалы.
Гидравлический разрыв пласта можно выполнить в одном месте нагнетания флюида или во многих местах нагнетания флюида в подземную зону, причем флюид можно нагнетать в течение одного периода времени или на протяжении многих различных периодов времени. В некоторых случаях, в процессе гидравлического разрыва пласта можно использовать много различных мест нагнетания флюида в одном скважинном стволе, много мест нагнетания флюида во многих разных скважинных стволах или и то и другое в подходящих сочетаниях. Кроме того, в процессе гидравлического разрыва пласта можно нагнетать флюид через скважинный ствол любого подходящего типа, такой как, например, вертикальный ствол, наклонный ствол, горизонтальный ствол, искривленный ствол или через стволы вышеперечисленных типов в любом приемлемом сочетании.
Гидравлическим разрывом пласта можно управлять посредством любой пригодной системы, с использованием любого подходящего способа. Приборные автомобили 116 могут включать в себя мобильные транспортные средства, стационарные установки или другие пригодные конструкции. Приборные автомобили 116 могут содержать систему управления нагнетанием, которая контролирует и управляет гидравлическим разрывом пласта, применяемой подсистемой 120 нагнетательной обработки. В некоторых вариантах осуществления настоящего изобретения, система управления нагнетанием может сообщаться с другим оборудованием для контроля и управления нагнетательной обработкой. Например, приборные автомобили 116 могут сообщаться с автомобильной насосной установкой 114, подповерхностными приборами и оборудованием контроля.
Гидравлический разрыв пласта, как и другие вмешательства и природные явления, может генерировать в подземной зоне 121 микросейсмические события, при этом из подземной зоны 121 можно собирать микросейсмические данные. Например, микросейсмические данные можно собирать посредством одного или нескольких датчиков 112, связанных с наблюдательной скважиной 104, или же микросейсмические данные можно собирать посредством систем других типов. Микросейсмическая информация, зарегистрированная в скважинной системе 100, может включать в себя акустические сигналы, порождаемые природными явлениями, акустические сигналы, связанные с гидравлическим разрывом пласта, применяемым в рабочей скважине 102, или сигналы других типов. Например, датчики 112 могут регистрировать акустические сигналы, создаваемые при сползании пород, движении пород, растрескивании пород или других событиях, происходящих в подземной зоне 121. В некоторых случаях, по микросейсмическим данным можно определить местонахождение отдельных микросейсмических событий.
Микросейсмические события в подземной зоне 121 могут происходить, например, вдоль искусственно образованной трещины гидравлического разрыва или рядом с указанной трещиной. Микросейсмические события могут быть связаны с ранее существовавшими естественными трещинами или плоскостями трещин, искусственно созданными в ходе гидравлического разрыва пласта. В некоторых средах, большинство микросейсмических событий, которые можно обнаружить, связаны с оползнево-сдвиговым растрескиванием породы. Указанные события могут соответствовать, а могут не соответствовать искусственно созданным трещинам растяжения при гидравлическом разрыве, которые развиваются в значительной степени по ширине. На ориентацию трещины может повлиять режим напряжений, присутствие систем трещин, образованных в различные моменты времени в прошлом (например, при той же самой или другой ориентации напряжения). В некоторых средах, более старые трещины с течением геологического времени могут смыкаться цементированием и оставаться в подповерхностных породах в виде плоскостей ослабления.
Показанная на фиг. 1А наблюдательная скважина 104 включает в себя скважинный ствол 111 в подземной зоне под поверхностью 106. Указанная наблюдательная скважина 104 содержать датчики 112 и другое оборудование, которое может быть использовано для регистрации микросейсмической информации. Указанные датчики 112 могут представлять собой геофоны или оборудование прослушивания других типов. Указанные датчики 112 могут быть расположены в разных местах в скважинной системе 100. Показанные на фиг. 1А датчики установлены на поверхности 106 и под поверхностью 106 в скважинном стволе 111. Дополнительно или в качестве альтернативы, указанные датчики можно располагать в других местах над или под поверхностью 106, в других местах внутри скважинного ствола 111, или внутри другого скважинного ствола. Указанная наблюдательная скважина 104 может содержать дополнительное оборудование (например, рабочую колонну, пакеры, обсадную колонну или другое оборудование), не показанное на фиг. 1А. В некоторых вариантах осуществления настоящего изобретения, микросейсмические данные регистрируются датчиками, установленными в рабочей скважине 102 или на поверхности 106, при этом наблюдательная скважина не используется.
В некоторых случаях, компьютерная система 110 целиком или частично может быть предусмотрена в техническом центре управления на площадке скважины, в удаленном центре управления в режиме реального времени, в другом, пригодном для выполняемых задач месте, или же расположена в вышеуказанных местах в любом приемлемом сочетании. Скважинная система 100 и компьютерная подсистема 110 могут содержать любую пригодную коммуникационную инфраструктуру или иметь доступ к указанной инфраструктуре. Например, скважинная система 100 может включать в себя много отдельных коммуникационных каналов или сеть соединенных друг с другом коммуникационных каналов. Коммуникационные каналы могут содержать проводные или беспроводные коммуникационные системы. Например, датчики 112 могут сообщаться с приборными автомобилями 116 или с компьютерной подсистемой 110 по проводным или беспроводным каналам или сетям, либо приборные автомобили 116 могут сообщаться с компьютерной подсистемой 110 по проводным или беспроводным каналам связи. Коммуникационные каналы могут включать в себя общественные информационно-коммуникационные сети, частные информационно-коммуникационные сети, спутниковые каналы, выделенные коммуникационные каналы, телекоммуникационные каналы или те или иные коммуникационные каналы в любом приемлемом сочетании.
Указанная компьютерная подсистема 110 способна анализировать микросейсмические данные, собранные в скважинной системе 100. Например, указанная компьютерная подсистема 110 способна анализировать данные микросейсмических событий, полученные в ходе гидравлического разрыва пласта подземной зоны 121. Микросейсмические данные, полученные в ходе гидравлического разрыва пласта, могут включать в себя данные, собранные до, во время или после нагнетания флюида. Указанная компьютерная система 110 может принимать микросейсмические данные в любое подходящее время. В некоторых случаях, компьютерная система 110 получает микросейсмические данные в режиме реального времени (или по существу в режиме реального времени) во время выполнения гидравлического разрыва пласта. Например, микросейсмические данные могут быть отправлены в указанную компьютерную подсистему 110 сразу же после их регистрации датчиками 112. В некоторых случаях, указанная компьютерная подсистема 110 получает часть или все микросейсмические данные после завершения гидравлического разрыва пласта. Указанная компьютерная подсистема 110 может получать микросейсмические данные в любом приемлемом формате. Например, компьютерная подсистема 110 может получать микросейсмические данные в том формате, в котором их выдают микросейсмические датчики или детекторы, либо компьютерная подсистема 110 может получать микросейсмические данные после того, как микросейсмические данные будут отформатированы, сгруппированы в пакеты или обработаны каким-либо иным способом. Компьютерная подсистема 110 может получать микросейсмические данные любыми приемлемыми средствами. Например, указанная компьютерная подсистема 110 может получать микросейсмические данные по проводному или беспроводному коммуникационному каналу, по проводной или беспроводной сети, или через один или несколько дисков или через другие материальные носители данных.
Компьютерную подсистему 110 можно использовать для того, чтобы на основании микросейсмических данных сгенерировать гистограмму. Гистограмму можно использовать, например, для выявления преобладающих ориентаций трещины в подземной зоне 121. На фиг. 2 показан пример гистограммы. Преобладающие ориентации трещин можно выявить, например, по локальным максимумам в данных гистограммы. Преобладающие ориентации трещины могут соответствовать ориентациям семейств трещин в подземной зоне 121. В некоторых случаях, микросейсмические данные, соответствующие каждой преобладающей ориентации трещины, используют для того, чтобы сгенерировать одну или более плоскостей трещин.
Некоторые из раскрытых в настоящем документе способов и операций могут быть реализованы компьютерной подсистемой, выполненной с возможностью обеспечения описанной функциональности. В разнообразных вариантах осуществления настоящего изобретения, компьютерное устройство может содержать любой из всевозможных типов устройств, в том числе, системы персональных компьютеров, настольные компьютеры, персональные компьютеры, ноутбуки, компьютерные мейнфрейм-системы, карманные компьютеры, рабочие станции, планшетные компьютеры, серверы приложений, устройства хранения информации или вычислительные или электронные устройства любого типа.
На фиг. 1В показана блок-схема компьютерной подсистемы 110, пример которой показан на фиг. 1А. Указанная примерная компьютерная подсистема 110 может быть расположена на одной или нескольких скважинах скважинной системы 100 или вблизи указанных скважин, или она может быть расположена в удаленном месте. Компьютерная подсистема 110 целиком или частично может работать независимо от скважинной системы 100 или независимо от любого из компонентов, показанных на фиг. 1А. Указанная примерная компьютерная подсистема 110 содержит процессор 160, запоминающее устройство 150, контроллеры 170 ввода/вывода, соединенные с возможностью обмена информацией посредством шины 165. Указанное запоминающее устройство может включать в себя, например, оперативное запоминающее устройство (ОЗУ), устройство хранения информации (например, перезаписываемое постоянное запоминающее устройство (ПЗУ) и другие типы), жесткий диск, или другие типы носителей информации. Указанная компьютерная подсистема 110 может быть предварительно запрограммирована или же ее можно программировать (и перепрограммировать), загружая программу с другого источника (например, с диска CD-ROM, с другого компьютерного устройства через сеть данных или другим путем). Контроллер 170 ввода/вывода соединен с устройствами ввода/вывода (например, с монитором 175, с манипулятором «мышь», с клавиатурой или с другими устройствами ввода/вывода) и с коммуникационным каналом 180. Устройства ввода/вывода получают и передают данные в аналоговой или цифровой форме по коммуникационным каналам, таким как последовательный канал, беспроводной канал (например, инфракрасный, радиочастотный или другой канал), параллельный канал или по каналу другого типа.
Коммуникационный канал 180 может включать в себя любой тип коммуникационного тракта, коннектора, сети передачи данных или другого канала. Например, коммуникационный канал 180 может включать в себя проводную или беспроводную сеть, локальную вычислительную сеть LAN (Local Area Network), глобальную вычислительную сеть WAN (Wide Area Network), частную сеть, общедоступную сеть (такую как Интернет), сеть WiFi (Wireless Fidelity) беспроводного доступа, сеть, включающую в себя спутниковый канал, или другой тип сети передачи данных.
Указанное запоминающее устройство 150 может хранить инструкции (например, компьютерный код), связанные с операционной системой, компьютерными приложениями и другими ресурсами. Указанное запоминающее устройство 150 может также хранить данные приложений и объекты данных, которые могут интерпретироваться одним или несколькими приложениями или виртуальными машинами, работающими в компьютерной подсистеме 110. Как показано на фиг. 1В, примерное запоминающее устройство 150 содержит микросейсмические данные 151, геологические данные 152, данные 153 трещин, прочие данные 155 и приложения 156. В некоторых вариантах осуществления настоящего изобретения, указанное запоминающее устройство компьютерного устройства включает в себя дополнительную или другую информацию.
Микросейсмические данные 151 могут включать в себя информацию о местонахождениях микросейсмических колебаний в подземной зоне. Например, микросейсмические данные могут включать в себя информацию, основанную на акустических данных, зарегистрированных в наблюдательной скважине 104, на поверхности 106, в рабочей скважине 102 или в других местах. Микросейсмические данные 151 могут включать в себя информацию, собранную датчиками 112. В некоторых случаях, микросейсмические данные 151 являются уже скомбинированными с другими данными, переформатированными или обработанными каким-либо другим образом. Данные микросейсмических событий могут включать в себя любую пригодную информацию, относящуюся к микросейсмическим событиям (местонахождения, магнитуды, неопределенности, время и т.д.). Данные микросейсмических событий могут включать в себя данные, собранные по одному или нескольким процессам гидравлического разрыва пласта, причем указанные данные могут содержать данные, собранные до, после или во время нагнетания флюида.
Геологические данные 152 могут включать в себя информацию по геологическим свойствам подземной зоны 121. Например, геологические данные 152 могут содержать информацию по подповерхностным слоям 122, информацию по скважинным стволам 101, 111 или информацию по другим признакам подземной зоны 121. В некоторых случаях, геологические данные 152 содержат информацию по литологии, содержанию флюида, профилю напряжения, профилю давления, пространственной протяженности или другим признакам одной или нескольких пластов горных пород в подземной зоне. Геологические данные 152 могут содержать информацию, собранную при каротаже скважин, полученную по образцам породы, по выходу пласта на поверхность, по построенным микросейсмическим изображениям и из других источников.
Данные 153 о трещинах могут содержать информацию по плоскостям трещин в подземной зоне. Данные 153 о трещинах могут выявлять местонахождения, размеры, геометрические формы и другие свойства трещин в модели подземной зоны. Данные 153 о трещинах могут содержать информацию о трещинах естественного происхождения, трещинах, вызванных гидравлическим разрывом пласта или о любых других типах прерывистости в подземной зоне 121. Данные 153 о трещинах могут включать в себя плоскости трещин, рассчитанные по микросейсмическим данным 151. Для каждой плоскости трещины, данные 153 трещин могут содержать информацию (например, углы простирания и падения и т.д.), выявляющую ориентацию трещины, информацию, выявляющую геометрическую форму (например, кривизну и толщину) трещины, информацию, выявляющую границы трещины, или любую другую пригодную информацию.
Приложения 156 могут включать в себя программные приложения, скрипты, программы, функции, исполняемые файлы, либо другие модули, интерпретируемые или исполняемые процессором 160. Такие приложения могут включать в себя машиночитаемые инструкции для выполнения одной или более операций, представленных на фиг. 4. Приложения 156 могут включать в себя машиночитаемые инструкции для генерирования пользовательского интерфейса или графического изображения, такого как, например, гистограмма, представленная на фиг. 2. Приложения 156 могут получать входные данные, такие как микросейсмические данные, геологические данные или другие типы входных данных, из запоминающего устройства 150, из другого локального источника или из одного или нескольких удаленных источников (например, по коммуникационному каналу 180). Приложения 156 могут генерировать выходные данные и сохранять выходные данные в запоминающем устройстве 150, в другом локальном носителе информации, либо в одном или нескольких удаленных устройствах (например, отправляя выходные данные по коммуникационному каналу 180).
Процессор 160 может исполнять инструкции, например, для того, чтобы генерировать выходные данные по входным данным. Например, процессор 160 может запускать приложения 156 путем исполнения или интерпретации программного обеспечения, скриптов, программ, функций, исполняемых файлов или других модулей, содержащихся в приложениях 156. Процессор 160 может выполнять одну или несколько операций, представленных на фиг. 4, или генерировать гистограмму, показанную на фиг. 2. Полученные процессором 160 входные данные или сгенерированные процессором 160 выходные данные могут включать в себя любое из следующих данных: микросейсмические данные 151, геологические данные 152, данные 153 трещин или прочие данные 155.
На фиг. 2 представлен график, иллюстрирующий примерную гистограмму 200. Примерная гистограмма 200 показанная на фиг. 2, является графическим отображением распределения ориентаций базовых плоскостей, полученных на основании множества микросейсмических данных. Гистограмма может быть сгенерирована на основании данных других типов, при этом гистограмма может отображать информацию других типов.
Примерная гистограмма 200, показанная на фиг. 2, включает в себя графическое изображение поверхности 206, отображающее вероятности ориентации плоскости трещины. В некоторых случаях, гистограмма включает в себя графическое изображение другого типа. Например, гистограмма может передавать ту же самую или аналогичную информацию в виде столбчатого графического изображения, топографического изображения или графического изображения другого типа. В представленном на фиг. 2 примере, каждая ориентация плоскости трещины отображается двумя переменными - углом простирания и углом падения. Гистограмма может быть использования для отображения распределения количеств по одной переменной, по двум переменным, по трем или более переменным.
Плоскость 206, показанная на фиг. 2, построена в трехмерной системе координат. Некоторые гистограммы строят в двух измерениях (например, для распределений по одной переменной), в трех измерениях (например, для распределений по двум переменным), или в четырех измерениях (например, для распределений по двум переменным во времени). В показанном на фиг. 2 примере, трехмерная система координат отображена вертикальной осью 204а и двумя горизонтальными осями 204b и 204с. Горизонтальная ось 204b отображает диапазон углов простирания (единицы измерения - градусы). Вертикальная ось 204а отображает диапазон вероятностей.
Параметры гистограммы 200 можно вычислить, например, генерируя интервалы, каждый из которых отображает четко выраженный диапазон или кластер ориентаций. Например, интервал может отображать диапазон углов простирания и диапазон углов падения. В показанной на фиг. 2 гистограмме 200 каждый из интервалов гистограммы соответствует пересечению поддиапазонов вдоль горизонтальных осей 204b и 204с.
Дополнительные параметры гистограммы 200 можно вычислить, например, путем вычисления количества ориентаций плоскостей, связанных с каждым интервалом. В показанной на фиг. 2 гистограмме, количество для каждого интервала отображается уровнем поверхности 206 для каждого из кластеров, отображенных в графическом изображении. Отображенные на фиг. 2 количества являются нормализованными значениями вероятности. В общем случае, количество для каждого интервала в гистограмме может быть нормализованным количеством или ненормализованным количеством. Например, количество плоскостей трещин для каждого интервала может быть значением вероятности, значением частоты, значением целого числа или значением другого типа.
Количество плоскостей трещин для каждого интервала гистограммы можно рассчитать, например, связав каждую плоскость трещины с интервалом, подсчитав число плоскостей трещин, имеющих ориентацию в диапазоне, отображенном каждым интервалом, или объединив те или иные способы. В некоторых случаях, плоскости трещины являются базовыми плоскостями, заданными точками микросейсмических данных, причем каждая базовая плоскость задает ориентацию, соответствующую одному из интервалов.
Приведенная в качестве примера гистограмма 200 отображает распределение вероятностей базовых плоскостей, связанных с 180-ю микросейсмическими событиями. В данном примере, каждый из интервалов отображает поддиапазон значений угла простирания в пределах указанного на гистограмме 200 диапазона угла простирания (от 0° для 360°), и поддиапазон значений угла падения в пределах указанного на гистограмме 200 диапазона угла падения (от 60° для 90°). Карта поверхности 206 демонстрирует несколько локальных максимумов (вершин), пять из которых на фиг. 2 отмечены номерами позиций 208а, 208b, 208с, 208d и 208е.
Вершины на гистограмме 200 отображают интервалы, связанные с количествами, превышающими количества соседних интервалов. Отображенные вершинами интервалы соответствуют множествам плоскостей трещины, имеющих одинаковую или параллельную ориентацию. В некоторых случаях, каждый локальный максимум (или вершина) на гистограмме может считаться соответствующим преобладающей (то есть, основной) направленности ориентаций. Направленность ориентаций может считаться преобладающей ориентацией трещин, например, когда большее число базовых плоскостей выровнено вдоль указанного направления, чем вдоль соседних или близлежащих направлений. Преобладающая ориентация трещины может отображать статистически значимое количество базовых плоскостей, являющихся либо параллельными, либо по существу параллельными, либо лежащими в одной плоскости.
На фиг. 2 показан пример гистограммы, построенной по двум угловым параметрам каждой базовой плоскости (то есть, по углам простирания и падения). Гистограмма может быть построена по другим параметрам базовых плоскостей. Например, в гистограммные данные может быть введен третий параметр каждой базовой плоскости. Третьим параметром, например, может быть расстояние d базовой плоскости от места происхождения. Гистограмму можно сгенерировать для параметров, относящихся к расстоянию, для параметров, относящихся к ориентации, или для вышеуказанных параметров в сочетании. В некоторых примерах, гистограмму можно сгенерировать для значений d tan(θ) и d tan(φ) для каждой базовой плоскости, основываясь на расстоянии d каждой базовой плоскости от места происхождения, на угле φ простирания каждой базовой плоскости и на угле θ падения каждой базовой плоскости. В некоторых случаях, можно сгенерировать двухмерную гистограмму по любым двум независимым переменным, таким как, например, tan(θ), tan(φ), угол φ простирания, угол θ падения или другим переменным.
На фиг. 3А и фиг. 3В представлены графики, иллюстрирующими пример ориентации плоскости трещины. На фиг. 3А показан график 300а, иллюстрирующий пример базовой плоскости 310, заданной тремя неколлинеарными микросейсмическими событиями 306а, 306b и 306с. На фиг 3В показан график вектора 308, нормального к базовой плоскости, показанной на фиг. 3А. На фиг. 3А и 3В вертикальная ось 304а отображает z-координату, горизонтальная ось 304b отображает х-координату, а горизонтальная ось 304с отображает y-координату. Графики 300а и 300b показывают прямоугольную систему координат; также возможно использование других типов координатных систем (например, сферические, эллиптические и т.д.).
Как показано на фиг. 3А, базовая плоскость 310 является двухмерной поверхностью, проходящей через трехмерную систему координат х, у, z. На ориентацию базовой плоскости 300 указывает нормальный вектор 308. Нормальный вектор может быть единичным вектором (вектором, имеющим единичную длину) или же нормальный вектор может иметь неединичную длину.
Как показано на фиг. 3В, нормальный вектор 308 имеет компоненты (а, b, с) вектора. Компоненты (а, b, с) вектора можно вычислить, например, по местонахождению микросейсмических событий 306а, 306b, 306с, на основании параметров базовой плоскости 310, или на основании другой информации. На графике 300b, х-компонент нормального вектора 308 отображен в виде длины а по оси х, y-компонент нормального вектора 308 отображен в виде длины b по оси у, а z-компонент нормального вектора 308 отображен в виде длины с по оси z. (В показанном примере y-компонент b имеет отрицательное значение).
Ориентацию базовой плоскости 310 можно вычислить по нормальному вектору 308, по самим микросейсмическим событиям, по параметрам базовой плоскости 310, по другим данным, или по любому сочетанию перечисленных данных. Например, угол θ простирания и угол φ падения базовой плоскости 310 можно вычислить по нормальному вектору 308 по следующему уравнению:

В некоторых случаях, способы вычисления могут принимать во внимание и надлежащим образом управлять чувствительностью приведенных выше уравнений, например, когда параметры а или с очень малы.
В некоторых случаях, ориентацию одной или нескольких базовых плоскостей можно использовать в качестве входных данных для генерирования гистограммных данных. Например, гистограмма ориентаций базовой плоскости может быть сгенерирована из множества базовых плоскостей. В некоторых случаях гистограммные данные генерируют путем соотнесения каждой базовой плоскости с интервалом на основании критерия ориентации (θ, φ) базовой плоскости и вычисления количества базовых плоскостей, связанных с каждым интервалом. В некоторых случаях, гистограмму строят в виде графического изображения, или же гистограммные данные можно использовать или обрабатывать без ее выводя на устройство отображения.
На фиг. 4 показана блок схема примерного способа 400 выявления преобладающих ориентаций трещин. Некоторые или все этапы способа 400 можно реализовать посредством одного или нескольких компьютерных устройств. В некоторых вариантах осуществления настоящего изобретения, способ 400 может включать дополнительные этапы, другие этапы, или меньшее число этапов, выполняемых в том же самом или другом порядке. Кроме того, одна или несколько отдельных этапов способа 400 можно выполнять изолированно или в других контекстах. Сгенерированные способом 400 выходные данные, в том числе выходные данные, полученные на промежуточных этапах, могут содержать сохраненную, выведенную на устройство отображения, распечатанную, переданную, сообщенную или обработанную информацию.
В некоторых вариантах осуществления настоящего изобретения, все или часть из указанных этапов способа 400 выполняют в режиме реального времени в ходе гидравлического разрыва пласта. Этап можно выполнять в режиме реального времени, например, выполняя этап в ответ на получение данных (например, от датчика или системы контроля) без существенной задержки. Этап можно выполнять в режиме реального времени, например, выполняя этап во время контроля за поступлением дополнительных микросейсмических данных при гидравлическом разрыве пласта. Некоторые этапы, выполняемые в режиме реального времени, могут получать входные данные и выдавать выходные данные во время гидравлического разрыва пласта. В некоторых вариантах осуществления настоящего изобретения выходные данные становятся доступными пользователю в пределах заданного промежутка времени, что позволяет пользователю отреагировать на выходные данные, например, путем внесения изменений в процесс гидравлического разрыва пласта.
В некоторых случаях, все или часть этапов способа 400 выполняют динамически в ходе гидравлического разрыва пласта. Этап способа можно выполнять динамически, например, итерационно или многократно выполняя этап по дополнительным входным данным, например, по мере того, как входные данные становятся доступными. В некоторых случаях, динамические этапы выполняют в ответ на получение данных по новому микросейсмическому событию (или в ответ на получение данных по конкретному числу новых микросейсмических событий и т.д.).
На этапе 402, получают микросейсмические данные о процессе гидравлического разрыва пласта. Например, микросейсмические данные могут быть получены из запоминающего устройства, от удаленного устройства или из другого источника. Данные микросейсмических событий могут содержать информацию об измеренных местонахождениях множественных микросейсмических событий, информацию об измеренной магнитуде каждого микросейсмического события, информацию об неопределенности, связанной с каждым микросейсмическим событием, информацию о времени, связанном с каждым микросейсмическим событием и т.д. Данные микросейсмических событий могут включать в себя микросейсмические данные, собранные на наблюдательной скважине, на рабочей скважине, на поверхности или в других местах в скважинной системе. Микросейсмические данные, полученные при гидравлическом разрыве пласта, могут включать в себя данные по событиям, обнаруженным до, после или во время применения гидравлического разрыва пласта. Например, в некоторых случаях, микросейсмический контроль начинают до применения гидравлического разрыва пласта, заканчивают после применения гидравлического разрыва пласта, или же используют оба варианта.
На этапе 404, выявляют копланарные подмножества микросейсмических событий. Копланарное подмножество микросейсмических событий может включать в себя три микросейсмических события или более трех микросейсмических событий. Например, каждое подмножество может быть триплетом местонахождений микросейсмических событий. В некоторых случаях, копланарные подмножества выявляют путем выявления всех триплетов в множестве данных микросейсмических событий. Например, для N местонахождений микросейсмических событий можно выявлять N(N-1)(N-2)/6 триплетов. В некоторых случаях, в подмножествах выявляют не все триплеты. Например, могут исключать некоторые триплеты (например, коллинеарные или по существу коллинеарные триплеты).
На этапе 406, для каждого копланарного подмножества микросейсмических событий выявляют базовую плоскость. Например, базовую плоскость можно выявить, вычислив параметры базовой плоскости по триплету местонахождений микросейсмических событий. В некоторых случаях, плоскость можно выявить тремя параметрами a, b и с модели базовой плоскости. Эти параметры можно рассчитать по координатам х, у и z трех коллинеарных точек подмножества, например, решив систему линейных уравнений для трех параметров. Например, параметры плоскости, заданной тремя неколлинеарными событиями (x1, у1, z1), (x2, y2, z2) и (х3, у3, z3), можно вычислить решением следующей системы уравнений:
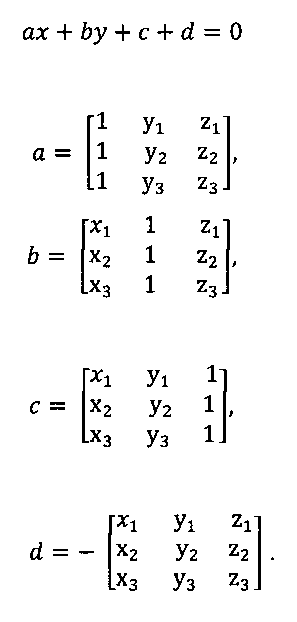
На этапе 408, рассчитывают количество базовых плоскостей в каждом из заданного количества диапазонов ориентаций. Диапазоны ориентаций задаются кластерами значений ориентаций и могут соответствовать интервалам гистограммы. В некоторых случаях, интервалы совместно покрывают полный диапазон ориентаций базовых плоскостей, при этом каждый отдельный интервал соответствует телесному углу в трехмерном пространстве. Телесный угол может быть задан, например, диапазоном углов падения и диапазоном углов простирания, или угловыми диапазонами, заданными сочетаниями угла простирания и угла падения.
Количество базовых плоскостей в каждом интервале может быть рассчитано, например, путем выявления ориентации каждой плоскости и определением того, в какой из интервалов попадает ориентация каждой базовой плоскости. В некоторых случаях, для всех базовых плоскостей вычисляют нормальные векторы, по которым вычисляют ориентации базовых плоскостей. В некоторых случаях, ориентация каждой базовой плоскости включает в себя угол простирания и угол падения для одной из базовых плоскостей. Например, ориентации базовых плоскостей можно вычислить по приведенному выше уравнению 1. Для вычисления ориентации базовой плоскости могут быть использованы и другие способы.
В некоторых вариантах осуществления настоящего изобретения, диапазоны ориентации для каждого интервала являются предварительно вычисленными значениями. Например, интервалы можно определить независимо от ориентаций базовой плоскости. В некоторых вариантах осуществления настоящего изобретения, интервалы определяют по ориентациям базовых плоскостей, выявленных на этапе 406. Например, как показано на фиг. 4, значения ориентаций базовой плоскости можно сортировать на этапе 408, а на этапе 410 (например, используя какую-либо методологию кластеризации, схемы ближнего соседа и т.д.) выявлять интервалы по сортированным значениям ориентации базовой плоскости.
В некоторых случаях, интервалы выявляют по подмножествам кластеров значений ориентации. Например, интервалы можно выявлять путем сортировки углов простирания, выявления кластеров сортированных углов простирания, сортировки углов падения, выявления кластеров сортированных углов падения и задания интервалов по кластерам сортированных углов простирания и по кластерам сортированных углов падения.
Кластеры по значениям ориентации базовых плоскостей можно определить несколькими различными способами. На фиг. 5, которая будет рассмотрена более подробно далее, показан пример итерационного способа выявления кластеров значений ориентации. На фиг. 6, которая будет рассмотрена более подробно далее, показан пример динамического способа выявления кластеров значений ориентации. Кроме этого, кластеры по значениям ориентации базовых плоскостей можно определить и другими способами.
На этапе 412, можно рассчитать количество базовых плоскостей в каждом интервале. Количество ориентаций базовых плоскостей может быть значением вероятности, значением частоты, целым числом плоскостей или значением другого типа. Например, количество базовых плоскостей в конкретном кластере может быть числом базовых плоскостей, имеющих ориентацию базовой плоскости, связанную с данным кластером. В другом примере, количество базовых плоскостей в конкретном кластере может быть числом базовых плоскостей, имеющих ориентацию базовой плоскости, связанную с заданным диапазоном ориентаций, разделенным на общее число выявленных базовых плоскостей. Количества могут быть нормализованы, например, так, чтобы сумма количеств равнялась единице (или другому значению нормализации). Примеры способов выявления количеств раскрыты в настоящем документе, например, в разделах, озаглавленных «Выявление кластеров ориентации по микросейсмическим данным» и «Обновление гистограммных данных».
На этапе 414, по количествам, рассчитанным на этапе 412, выявляют преобладающие ориентации трещин. Преобладающие ориентации трещин можно выявить, например, как кластеры, имеющие локальные более высокие максимумы ориентаций базовой плоскости. В некоторых случаях, преобладающие ориентации трещин выявляют по локальным максимумам в гистограммных данных, сгенерированных по указанным количествам. Может быть выявлена одна преобладающая ориентация трещин, или могут быть выявлены множественные преобладающие ориентации трещин. В некоторых случаях, преобладающую ориентацию трещины выявляют по высоте, ширине и другим параметрам вершины в гистограммных данных. Преобладающую ориентацию трещин можно выявить как центральную точку кластера, преобладающую ориентацию трещины можно вычислить как среднюю ориентацию базовых плоскостей в кластере или преобладающую ориентацию трещин можно рассчитать и другим образом.
Преобладающая ориентация трещин, выявленная по количествам, рассчитанным на этапе 412, может отображать ориентацию физических трещин в подземной зоне. В некоторых пластах горных пород, трещины обычно формируются множествами (или семействами), имеющими параллельную или одинаковую ориентации. Некоторые пласты содержат множества трещин. Например, пласт может содержать первое множество трещин, имеющих первичную ориентацию, которую может задавать направление максимального напряжения. Формация также может содержать второе множество трещин, имеющих вторичную ориентацию, отличающуюся от первичной ориентации. Вторичная ориентация может отличаться от первичной ориентации, например, на девяносто градусов или на другой угол. В некоторых случаях, каждая преобладающая ориентация трещин соответствует ориентации множества трещин в подземной зоне.
В некоторых случаях, преобладающую ориентацию трещин выявляют в соответствии с алгоритмом или способом, которые способны находить какую-либо преимущественную ориентацию, например, на основании физических свойств или на основании какой-либо другой информации. Алгоритм может выявить то, насколько сильно данные указывают на преобладание данной ориентации (например, на основании значения достоверности от 0 до 1), при этом указанный алгоритм принять указанную информацию в расчет при генерировании различных направленностей первичных ориентаций.
На этапе 416, на устройство отображения выводят гистограмму значений ориентаций базовой плоскости. Гистограмма указывает на количество ориентаций базовой плоскости в каждом из кластеров. Пример такой гистограммы показан на фиг. 2. Количества можно вывести на устройство отображения в другом формате или в виде гистограммы другого типа. Гистограмму можно построить, например, в двух измерениях или трех измерениях. В некоторых случаях, гистограмму строят в виде непрерывной линии или поверхности, в виде массива дискретных элементов рельефа (например, в виде столбчатой диаграммы), в виде топографических регионов, или в другом графическом отображении. Дополнительно или в качестве альтернативы, к представлению гистограммы в графическом виде, значения ориентаций базовой плоскости могут быть представлены в виде числовых значений, алгебраических значений, в виде числовой таблицы или в ином формате.
На этапе 418, генерируют плоскости трещин. Плоскости трещин можно сгенерировать, например, по точкам микросейсмических данных и преобладающим ориентациям трещин, выявленным на этапе 414. В некоторых случаях, выявляют кластер микросейсмических событий, связанных с каждой из преобладающих ориентаций трещин, и генерируют плоскость трещины из каждого кластера. В некоторых случаях, плоскости трещин выявляют по местонахождениям и другим параметрам измеренных микросейсмических событий. Например, трещину можно сгенерировать путем подгонки отдельных кластеров микросейсмических событий к плоскости. Для генерирования плоскости трещины можно использовать другие способы. Примеры способов генерирования плоскостей трещин из микросейсмических данных раскрыты в настоящем документе, например, в разделах, озаглавленных как «Анализ микросейсмических данных при выполнении гидравлического разрыва пласта», «Управление микросейсмическими данными для привязки трещин», «Выявление плоскостей трещин по микросейсмическим данным» и «Обновление плоскостей развивающихся трещин».
В некоторых случаях, алгоритм может получить внешние входные данные (от пользователя, от другого процесса физического анализа). Внешние входные данные могут содержать информацию, например, о том, что конкретная ориентация с большей вероятностью является первичной ориентацией (то есть, несущей предварительно заданный признак достоверности), о том, что конкретная ориентация с меньшей вероятностью имеет плоскости в данном направлении (то есть, имеет очень низкий, или даже нулевой уровень достоверности). Данные такого типа могут сместить вычисление плоскостей, заложенных в множестве микросейсмических данных, для того, чтобы отразить такие настройки.
В некоторых случаях, гистограмму выводят на устройство отображения в режиме реального времени в ходе гидравлического разрыва пласта, при этом гистограмму можно динамически обновлять по мере регистрации дополнительных микросейсмических событий. Например, каждый раз, когда получают новое микросейсмическое событие, возможно выявление дополнительных базовых плоскостей и соответствующее обновление количества базовых плоскостей в каждом кластере. В некоторых случаях, кластеры также обновляют динамически по мере получения микросейсмических данных. Примеры способов обновления гистограммы по дополнительным микросейсмическим данным раскрыты в настоящем документе, например, в разделе «Обновление гистограммных данных».
В некоторых случаях, плоскости трещины обновляют в режиме реального времени, например, в ответ на сбор микросейсмических данных. Примеры способов обновления плоскостей трещин по микросейсмическим данным раскрыты в настоящем документе, например, в разделах, озаглавленных «Анализ микросейсмических данных при выполнении гидравлического разрыва данных», «Управление микросейсмическими данными для привязки трещин», «Выявление плоскостей трещин по микросейсмическим данным» и «Обновление плоскостей развивающихся трещин». В некоторых случаях, по новым микросейсмическим данным можно внести изменения (например, повысить или понизить) в уровень достоверности для каждой плоскости трещины. В некоторых случаях, на основании новых микросейсмических данных можно создать новую плоскость трещины или удалить ранее сгенерированную плоскость трещины.
На фиг. 5 и фиг. 6, в соответствии с вышеприведенным описанием, проиллюстрирован пример итерационного способа выявления кластеров значений ориентации (фиг. 5) и пример динамического способа выявления кластеров значений ориентации (фиг. 6). Существуют и другие примеры. Однако оба приведенных здесь в качестве примера способов являются адаптивными в том, что число и диапазоны ориентаций не установлены заранее. Наоборот, число и диапазоны ориентаций определяются по мере того, как значения ориентаций связываются с кластерами, исходя из степени изменчивости самих значений ориентации, при этом число и диапазоны ориентаций всех кластеров не определяют до тех пор, пока все значения ориентаций, собираемые в кластеры, не будут отнесены к кластеру. В силу адаптивности способов, диапазоны ориентаций кластеров не обязательно должны быть однородными, и обычно некоторые кластеры будут иметь диапазоны ориентаций, отличающиеся от диапазонов ориентаций других кластеров. В некоторых случаях, адаптивная природа способов позволяет числу и диапазону ориентаций кластеров автоматически подстраиваться для отражения основных трендов и особенностей данных.
Сначала не обязательно обрабатывать и кластеризовать все значения ориентации, заданные по полному множеству микросейсмических данных. Наоборот, можно обработать подмножество данных и кластеризовать значения его ориентаций. Подмножество, являющееся случайной выборкой данных, может выдать точное или достаточно точное отображение всего множества данных. Таким образом, обработка случайного подмножества данных, если оно представлено с большим множеством данных, может позволить обеспечить решение (то есть, кластеры) за более короткий период времени и с меньшим объемом вычислений, чем обработка всего множества данных. Обработка подмножества данных может позволить сначала обеспечить, пока идет обработка всего множества, предварительный просмотр решения по подмножеству. В некоторых случаях несколько подмножеств данных можно обрабатывать, используя один или оба из раскрытых в настоящем документе примерных способов. Так как аналогичные множества данных с использованием примерных способов выдадут конгруэнтные решения (то есть, кластеры), то решения для нескольких подмножеств данных, например, для случайных неперекрывающихся подмножеств из одного и того же супермножества, можно объединить для получения решения на основании большего множества данных. Обработка с последующим объединением решений по нескольким подмножествам данных может способствовать параллельной обработке данных. Например, подмножество данных или полное множество данных можно разбить на заданное число подмножеств, соответствующее количеству процессоров, компьютеров или параллельных вычислительных потоков. Каждый процессор, компьютер или параллельный вычислительный поток может генерировать свои собственные кластеры значений ориентации параллельно друг другу и быстрее по времени, чем при обработке Того же объема данных с той же скоростью в один вычислительный поток. После этого, кластеры каждого из параллельных процессов можно скомбинировать в одно решение.
Показанный на фиг. 5 способ является итерационным в том смысле, что число и диапазоны ориентаций кластеров итерационно определяют путем повторяемых объединений и разбивок исходного множества кластеров по критерию степени изменчивости в кластерах. Так как процесс является итерационным, число кластеров и диапазон ориентаций, связанный с каждым кластером, не определяются до тех пор, пока итерации не останавливают тогда, когда, например, число кластеров стабилизируется и сходится (например, на оптимальном или почти оптимальном решении, когда необходимость продолжения итераций мала или отсутствует), или в какой-либо другой точке остановки. Кроме того, итерации могут выдать решение, в котором различные кластеры имеют различные диапазоны ориентаций (то есть, не все кластеры являются одним и тем же угловым диапазоном). В некоторых случаях, итерации могут сходиться к оптимальному множеству кластеров, причем каждая итерация последовательно улучшает кластеры. Стоит отметить, что, несмотря на то, что выше было сказано, что значения ориентаций сначала сортируют (на этапе 408, фиг. 4), для итерационного способа отсутствует необходимость в сортировке значений ориентаций, при этом указанный этап может быть опущен. Итерационный способ, выполняемый на сортированных данных и на несортированных данных, достигнет одного и того же статистического решения (то есть, одинаковых кластеров), но способу, выполняемому на несортированных данных, для достижения решения могут потребоваться дополнительные итерации. В некоторых случаях, может оказаться, что получится быстрее выполнить итерационный способ на несортированных данных, чем сначала сортировать данные, а затем выполнять итерационный способ.
Для этого, на этапе 502, формируют множество кластеров, первоначально связывая каждое из значений ориентации с кластером. Механизм первоначальной кластеризации значений ориентации выбирают для создания такого числа кластеров, которые можно управляемо обработать. В некоторых случаях, механизм первоначальной кластеризации значений ориентации выбирают так, чтобы создать совсем небольшое число кластеров, например, от 3 до 5 кластеров. Однако можно создать и другое число первоначальных кластеров.
В некоторых случаях, первоначальные кластеры можно задать по фиксированному, установленному максимальному диапазону ориентаций. Существует несколько пригодных для использования различных механизмов осуществления фиксированных угловых диапазонов ориентации. Однако в одном примере, полный угловой диапазон значений ориентации или возможных значений ориентации в множестве данных делят поровну на одинаковые угловые диапазоны, каждый из которых соответствует интервалу. После этого, значения ориентации связывают с интервалами, а затем кластеризуют по критерию того, попадают ли значения ориентации в угловой диапазон интервала.
В некоторых случаях, каждый из кластеров может иметь фиксированный, установленный максимальный диапазон, заданный по угловому расхождению, измеренному между соседними значениями ориентации, связанными с одним и тем же кластером. Например, новое значение ориентации связывают с кластером, если наименьшее угловое расстояние между значением ориентации и репрезентативным значением ориентации кластера (то есть, соседним значением ориентации) меньше заданного максимального углового расхождения. Например, репрезентативное значение может быть значением одного из элементов кластера, которое генерирует максимальное расхождение. Например, репрезентативным может быть среднеарифметическое значение элементов кластера. Например, имеются другие возможности выбора репрезентативного значения кластера. Угловое расхождение может быть охарактеризовано как пороговое значение. Если значение ориентации не может быть связано с существующим кластером, то создают новый кластер. Процесс повторяют для каждого анализируемого значения ориентации, пока все значения ориентации в множестве не будут связаны с кластером.
В некоторых случаях, кластеры могут иметь установленный максимальный диапазон, который является переменной, задаваемой по характеристике значений ориентации или кластеров. Например, диапазон может быть определен по степени изменчивости в значениях ориентации, например, в виде функции квадратичного отклонения, углового разброса значений ориентации или другой меры изменчивости. Предусмотрено несколько различных механизмов осуществления переменных диапазонов, которые можно использовать. Тем не менее в одном примере, пороговый угловой разброс (Т) выражается как:

где dmin является наименьшим угловым расстоянием между соседними значениями ориентаций в задаваемом кластере, dmax является наибольшим угловым расстоянием между соседними значениями ориентаций в задаваемом кластере, а=1-ехр(-γ*σ/µ), где γ является коэффициентом влияния, σ является квадратичным отклонением углового расстояния между соседними значениями ориентаций в формируемом кластере, а µ является средним значений ориентации в формируемом кластере. В некоторых случаях, γ находится в диапазоне от 0,5 до 1,0. Однако существуют и другие примеры переменных угловых диапазонов.
После того, как все или часть значений ориентации оказались связанными с кластерами, анализируют степень изменчивости в парах соседних кластеров для того, чтобы определить, оставить ли кластеры как есть, или выполнить их переоценку. На этапе 504 анализируют пару соседних кластеров. Если в соседних кластерах обнаруживают высокую степень изменчивости (например, свыше точно заданной степени изменчивости), на этапе 508 выполняют объединение кластеров. Если изменчивость не высока, то на этапе 506 один из кластеров может быть оставлен как есть, и, как раскрыто далее, на этапе 504 выполняют анализ на другом кластере и на кластере, являющемся соседним для него.
Степень изменчивости в кластере может быть рассчитана как функция квадратичного отклонения, углового разброса значений ориентации или другой меры изменчивости. В одном примере, степень изменчивости в кластере характеризуют характеристическим числом (С), выражаемым следующим образом:

или

где m - число значений ориентации в кластере, σ - квадратичное отклонение углового расстояния между соседними значениями ориентаций в кластере, а µ является средним значений ориентации в формируемом кластере. Таким образом, два соседних кластера объединяют, если у каждого из кластеров значение С будет больше установленного значения объединения.
На этапе 510 анализируют степень изменчивости в объединенном кластере для определения того, оставить ли объединенный кластер как есть, или разбить его, используя другой установленный максимальный диапазон. Если степень изменчивости в объединенном кластере высока (например, выше установленной степени изменчивости), то на этапе 512 значения ориентации в объединенном кластере заново связывают с двумя новыми кластерами, используя другой установленный максимальный диапазон. Если изменчивость невысока, то на этапе 506 объединенный кластер оставляют как есть. Как и выше, степень изменчивости в объединенном кластере может быть рассчитана как функция квадратичного отклонения, углового разброса значений ориентации или другой меры изменчивости. В одном примере, степень изменчивости характеризуют характеристическим числом (С), при этом объединенный кластер разбивают, если значение С будет больше заданного значения разбивки.
Другой установленный максимальный диапазон, используемый для разбивки ранее заданного кластера, может быть основан на степени изменчивости значений ориентации в указанном кластере или в других кластерах. Как указано выше, степень изменчивости в объединенном кластере может быть рассчитана как функция квадратичного отклонения, углового разброса значений ориентации или другой меры изменчивости. В одном примере, установленный пороговый угловой разброс, например:

рассмотренный выше, можно использовать для связывания значений ориентации с кластерами. В другом случае, установленный пороговый угловой разброс может быть выражен как:

где max(d) - наибольший угловой разброс между соседними значениями ориентаций двух соседних, существующих кластеров, a min(d) - наименьший угловой разброс между соседними значениями ориентаций двух соседних, существующих кластеров. Существуют и другие примеры.
Итерации этапов с 504 по 512 повторяют для каждого кластера в первоначальном множестве кластеров. Итерации этапов с 504 по 512 также повторяют для любых новых кластеров, сгенерированных объединением (на этапе 512), а если будут сгенерированы новые кластеры, то и для них тоже, и так далее. В конце концов, однако, итерации монотонно сходятся к решению, когда при выполнении итераций этапов с 504 по 512 новые кластеры не будут генерироваться, или число кластеров будет оставаться неизменным. В некоторых случаях, итерации могут сойтись к оптимальному множеству кластеров, причем каждая итерация будет последовательно улучшать кластеры. Итерации, тем не менее, могут выдать полезное решение еще до полного схождения. Таким образом, еще до схождения можно остановить итерации и оставить все кластеры как есть. В некоторых случаях можно остановить итерации, когда скорость изменения числа кластеров станет меньше установленной величины, когда кластеры с наибольшим количеством значений ориентаций стабилизируются или будут иметь значение достоверности точности выше конкретного установленного значения достоверности, после конкретного установленного числа итераций, или по другому критерию. В некоторых случаях, значение достоверности точности для кластера можно вычислить по числу значений ориентации, связанных с кластером, степени изменчивости в значениях ориентации, связанных с кластером, и по неопределенности местонахождения порождающих микросейсмических событий, используемых для задания базовых плоскостей значений ориентации, по другим значениям, или по любому подходящему сочетанию вышеперечисленных критериев.
Проиллюстрированный на фиг. 6 динамический способ является динамическим в том смысле, что после того, как кластер сгенерирован, диапазоны ориентаций каждого кластера определяют динамически и адаптивно по степени изменчивости в кластерах. На этапе 602 способа формируют первоначальный кластер путем связывания двух или более соседних значений ориентации с первоначальным кластером. Например, с первоначальным кластером связывают первые два или несколько соседних значений ориентации в конце сортированных значений ориентации. Для удобства, способ, раскрытый в настоящем документе, относится к обработке значений ориентации в убывающем порядке, поэтому первые два значения являются двумя наибольшими значениями ориентации, но способ может быть выполнен и в возрастающем порядке.
На этапе 604 определяют границу кластера, в рассматриваемом случае - первоначального, исходя из степени изменчивости кластера при его задании, например, в виде функции квадратичного отклонения, углового диапазона значений ориентации или по другой мере изменчивости. Границу кластера можно определить как установленный максимальный диапазон ориентации, например, заданный как пороговый угловой разброс (Т). Установленный максимум может быть определен как функция фиксированной или изменяющейся настроечной переменной и степени изменчивости в кластере. Имеется несколько способов определения границы кластера. Однако в одном примере, пороговый угловой разброс (Т) выражают как:

где β - настроечная переменная, а µ - среднее значений ориентации в кластере. В примере с фиксированной настроечной переменной, β является константой. В некоторых случаях, β намного меньше единицы. В некоторых случаях, β=0,1. Однако могут быть использованы и другие значения В. В примере с изменяющейся настроечной переменной:

где τβ - константа, а σ - квадратичное отклонение углового расстояния между соседними значениями ориентациями в кластере. В другом примере с изменяющейся настроечной переменной:
 (9)
(9)
где τβ - константа, dmin - наименьшее расстояние между значениями ориентации в кластере, a dmax - наибольшее расстояние между значениями ориентации в кластере. В некоторых случаях τβ равно 2 или 3. Тем не менее, можно использовать другие значения τβ.
Еще в одном примере, пороговый угловой разброс (Т) выражают как:

где µ - среднее значений ориентаций в кластере, τL - настроечная переменная и, если ориентации анализируют в убывающем порядке, σL - угловое расстояние между наибольшим значением ориентации в формируемом кластере и наименьшим значением ориентации в предшествующем по углу кластере. В некоторых случаях, τL=0,5 и β = от 0,1 до 1. Тем не менее, возможно использование других значений TL и β. В этом примере, верхнюю границу кластера первоначально можно определить следующим образом:

где τR - настроечная переменная, а σ - квадратичное отклонение углового расстояния между соседними значениями ориентаций в кластере. В некоторых случаях, τR изначально составляет 1 или 2, а β - от 0,1 до 1. Однако можно использовать и другие значения τL и β. Иначе говоря, для данного значения (О) ориентации, подлежащего связыванию с кластером, должно быть истинным следующее выражение:

На этапе 606, следующее значение ориентации в сортированном списке либо связывают с формируемым кластером, либо новое значение ориентации создает новый кластер. Например, значение ориентации сравнивают с порогом (Т). Если значение не выходит за порог, то значение ориентации связывают с кластером, а если оно выходит за порог, то оно создает новый кластер. В момент, когда определяют верхний порог (TU), значение ориентации также сравнивают с верхним порогом для определения того, связывать ли значение ориентации с кластером.
Эатпы 604 и 606 повторяют для каждого анализируемого значения ориентации, пока каждое из анализируемых значений ориентации не будет связано с кластером, и пока все кластеры не будут установлены.
В некоторых случаях, на этапе 608, границу скомплектованного кластера могут переоценить в случае появления дополнительной информации. Например, кластер считается скомплектованным, когда этапы 604 и 606 больше не связывают с ним значений ориентации, и когда сформирован новый соседний кластер. Верхняя граница затем более точно может быть определена следующим образом:

где, если ориентации анализируют в убывающем порядке, то σR является угловым расстоянием между наименьшим значением ориентации в анализируемом кластере и наибольшим значением в следующем кластере. В некоторых случаях, τR=0,5. Иначе говоря, для каждого значения (О) ориентации, связанного с анализируемым кластером, должно быть истинным следующее выражение:

Если указанное выражение не истинно, то значение связывают с другим кластером, например, с предшествующим по углу кластером, если его значение превысило TU, или со следующим соседним кластером, если его значение превысило Т.
На этапе 610, связь каждого значения ориентации в кластере переоценивают в свете переоцененных границ кластера, и на основе указанной переоценки, каждую ориентацию оставляют связанной с кластером или относят к новому кластеру.
Этапы 608 и 610 повторяют для всех анализируемых кластеров. В некоторых случаях, этапы 608 и 610 могут выполнять после того, как все кластеры будут заданы на этапах 604 и 606. В некоторых случаях, этапы 608 и 610 можно выполнять одновременно с задание кластеров на этапах 604 и 606, то есть параллельно и вслед за этапами 604 и 606, например, посредством другого компьютера, процессора или вычислительного потока. Например, этапы 608 и 610 могут быть выполнены на кластере после того, как кластер был изначально задан, и в то время как этапы 604 и 66 работают для задания соседнего или последующего кластера. Выполняемые параллельно, указанные этапы могут занять меньше времени, чем могла бы занять обработка того же самого объема данных с той же скоростью в один поток.
В некоторых случаях, степень изменчивости в скомплектованных кластерах можно проанализировать для того, чтобы решить, оставлять кластер как есть, или разбивать его. На этапе 612 кластер анализируют, и если находят высокую степень изменчивости (например, превышающую установленную степень изменчивости), и если кластер имеет большое число значений ориентации (например, превышающее установленное число), тогда, на этапе 614 кластер разбивают. Если изменчивость не высока, а число значений ориентации не большое, тогда кластер оставляют как есть. Степень изменчивости можно рассчитать как функцию квадратичного отклонения, углового разброса кластера или по другой мере. Существует несколько различных способов, которые можно использовать для того, чтобы решить, оставлять кластер как есть или разбивать его. Однако в одном примере, степень изменчивости определяют путем нахождения максимального углового расстояния между двумя соседними значениями ориентаций в кластере. Изменчивость считают высокой, если указанное максимальное угловое расстояние будет превышать результат перемножения настроечной переменной (τS) и углового расстояния до ближайших значений ориентации на любой из сторон. В рассматриваемом примере, число значений ориентации определяют как высокое, если анализируемый кластер содержит в два раза больше значений ориентации, чем любой другой кластер. Если принимают решение разбить кластер, тогда его разбивают на два кластера в точке максимального углового расстояния между любыми двумя соседними значениями ориентации в кластере.
Этапы 612 и 614 повторяют для каждого анализируемого кластера. В некоторых случаях, этапы 612 и 614 могут быть выполнены после того, как все кластеры будут заданы на этапах 604 и 606 и/или переоценены на этапах 608 и 610. В некоторых случаях, этапы 612 и 614 можно выполнять одновременно с заданием кластеров на этапах 604 и 606 и/или переоценкой на этапах 608 и 610, то есть параллельно и вслед за этапами 604 и 610, например, посредством другого компьютера, процессора или вычислительного потока. Выполняемые параллельно, указанные этапы могут занять меньше времени, чем могла бы занять обработка того же самого объема данных с той же скоростью в один поток.
Интервалы можно задавать по множествам кластеров значений ориентаций, полученным любым из способов, проиллюстрированных на фиг. 5 или фиг. 6, после чего их можно использовать на этапах 412-418, раскрытых выше со ссылкой на фиг. 4, для выявления преобладающих ориентаций трещин, генерирования гистограммы ориентаций базовых плоскостей и генерирования плоскостей трещин.
Как было отмечено выше, раскрытые в настоящем документе алгоритмы привязки трещин, в том числе способы, описанные выше со ссылкой на фиг. 4, могут работать на данных, поступающих в режиме реального времени, на ретроспективных данных, или на сочетании перечисленных данных. Что касается выполнения алгоритмов привязки трещин, то кластеризацию, в том числе кластеризацию способами, описанными выше со ссылкой на фиг. 5 и фиг. 6, можно выполнять на данных, поступающих в режиме реального времени, на ретроспективных данных, или на сочетании перечисленных данных. В примерах, где привязку трещин выполняют по данным, поступающим в режиме реального времени, или другим данным, не являющимися ретроспективными, указанные алгоритмы можно запускать для обновления выявленных ориентаций трещин по мере поступления новых данных. Когда поступают новые данные, независимо от того, происходит ли одиночное микросейсмическое событие или несколько микросейсмических событий, можно применить способы, описанные выше со ссылкой на фиг. 4-6, для генерирования обновленных плоскостей трещин и/или генерирования обновленной гистограммы ориентаций базовой плоскости. В некоторых случаях, независимо от того, выполняют ли анализ полностью на ретроспективных данных, или частично на ретроспективных данных и частично на данных, не являющихся ретроспективными данными, или полностью на данных, не являющихся ретроспективными данными (в том числе на данных, поступающих в режиме реального времени), способы кластеризации, описанные выше со ссылкой на фиг. 5 и фиг. 6, могут обеспечить одно и то же статистическое решение.
Таким образом, как показано на фиг. 7, на этапе 702 получают новые данные. Указанные способы могут быть выполнены с возможностью инициирования каждый раз при получении нового объекта данных, приостановки для получения установленного числа новых объектов данных (например, пока не будет получено пороговое число объектов), или работы в ответ на срабатывание какого-либо другого триггера. Однако после того, как будет решено начать обновление, на этапе 704 выполняют обновление базовых плоскостей. Обновление базовых плоскостей приводит к обновлению кластеров/диапазонов ориентаций на этапе 706, так как обновленные базовые плоскости могут задавать новые значения ориентаций. С использованием обновленных кластеров/диапазонов ориентаций, на этапе 708 выполняют обновление выявленных преобладающих ориентаций трещин. По обновленным выявленным преобладающим ориентациям трещин на этапе 710 можно обновить гистограмму ориентаций базовой плоскости, а на этапе 712 - обновить выявленные плоскости трещины.
В случаях, когда первоначальные данные кластеризуют адаптивными способами, например, описанными выше со ссылкой на фиг. 5 или фиг. 6, ассимиляция нового значения или значений ориентации в кластере может потребовать перезадания кластеров или части кластеров. Например, связывание нового значения ориентации с существующим кластером может изменить степень изменчивости значений ориентации в кластере. В итерационном способе, изменение может сделать кластер пригодным для объединения с соседним кластером или для разбивки, что, в случае выполнения, может, в свою очередь, повлиять на близлежащие кластеры, делая их пригодными для объединения или разбивки, что, в случае выполнения, может, в свою очередь, повлиять на другие кластеры, и так далее, подобно эффекту домино в кластерах. Если в кластеры ассимилируют более одного значения ориентации, то эффект мультиплицируется. Динамический способ может испытать такой же эффект домино. В результате, когда в кластеры ассимилируют новые значения ориентации, кластеры могут быть переоценены, а связь существующих значений ориентации может быть изменена на связь с другими кластерами, кластеры могут быть расформированы, или могут быть сформированы новые кластеры.
Если инициировался процесс ассимиляции нового значения ориентации или множества значений ориентации, и по истечении заданного времени получают еще одно значение ориентации или множество значений ориентации, то ассимиляция первого значения ориентации или множества значений ориентации может быть остановлена. После этого, процесс переоценки и обновления кластеров запускается снова, теперь с учетом значений ориентации, полученных позднее.
Некоторые варианты осуществления настоящего изобретения и этапы, раскрытые в данном документе, могут быть реализованы в цифровых электронных схемах или в компьютерном программном обеспечении, аппаратно-реализованных программах или в аппаратной части, в том числе в раскрытых в настоящем описании структурах и их структурных эквивалентах, или в сочетании одного или нескольких из перечисленных структур. Некоторые из раскрытых в данном документе вариантов осуществления настоящего изобретения могут быть реализованы в виде одной или более компьютерных программ, то есть в одном или нескольких модулях компьютерных программных инструкций, записанных в виде кода на компьютерном носителе информации и предназначенных для исполнения посредством аппаратуры обработки данных или для контроля работы указанной аппаратуры. Компьютерный носитель информации может представлять собой или может содержаться в машиночитаемым устройстве хранения, в машиночитаемой подложке хранения, матрице запоминающего устройства или запоминающем устройстве с произвольным или последовательным доступом, или в одном или нескольких из перечисленных устройств в сочетании. Кроме того, хотя компьютерный носитель информации не является распространяемым сигналом, компьютерный носитель информации может быть источником или приемником компьютерных программных инструкций, закодированных в искусственно созданном распространяемом сигнале. Компьютерный носитель информации также может представлять собой или может содержаться в одном или нескольких отдельных физических компонентах или носителях (например, несколько компакт-дисков (CD), дисков или других устройств хранения).
Термин «аппаратура обработки данных» включает в себя все виды аппаратуры, устройств и машин для обработки данных, в том числе, например, программируемый процессор, компьютер, систему на микросхеме или на нескольких микросхемах, или сочетании перечисленных устройств. Указанная аппаратура может включать в себя логические схемы специального назначения, например программируемую пользователем вентильную матрицу FPDA (Field Programmable Gate Array) или специализированную интегральную схему ASIC (Application Specific Integrated Circuit). Указанная аппаратура, в дополнение к аппаратной части, может включать в себя код, создающий среду исполнения для данной компьютерной программы, например, код, который составляет аппаратно-реализованные программы процессора, пакет протоколов, систему управления базами данных, операционную систему, межплатформенную среду исполнения, виртуальную машину, или одно или нескольких из вышеперечисленных устройств в сочетании. Указанная аппаратура и среда исполнения могут реализовывать разнообразные инфраструктуры модели организации вычислений, например веб-сервисы, инфраструктуры распределенных и сетевых вычислений.
Компьютерная программа (также известная как программа, программное обеспечение, программное приложение, скрипт или код) может быть написана на языке программирования любого вида, включая компилируемый язык, интерпретируемый язык, процедурные или непроцедурные языки. Компьютерная программа может соответствовать, но не обязательно, файлу или системе файлов. Программа может храниться в части файла, содержащего другие программы или данные (например, один или несколько скриптов, хранящихся в документе на языке разметки), в одном файле, предназначенном именно для данной программы, или в нескольких согласованных файлах (то есть, файлах, которые содержат в себе один или более модулей, подпрограмм, или частей кода). Компьютерная программа может быть развернута для исполнения на одном компьютере или нескольких компьютерах, расположенных на одной площадке или распределенных по нескольким площадкам и соединенных между собой коммуникационной сетью.
Некоторые раскрытые в настоящем документе процессы и логические потоки могут выполняться одним или несколькими программируемыми процессорами, исполняющими одну или несколько компьютерных программ для выполнения действий путем управления входными данными и путем выдачи выходных данных. Указанная аппаратура также может быть реализована как логические схемы специального назначения, например программируемая пользователем вентильная матрица (FPDA) или специализированная интегральная схема (ASIC), при этом процесс и логические потоки также могут выполняться на них.
К процессорам, пригодным для исполнения компьютерной программы, в числе прочего относятся, например, микропроцессоры общего назначения и микропроцессоры специального назначения, а также процессоры цифрового компьютера любого вида. Как правило, процессор принимает инструкции и данные из ПЗУ, из ОЗУ, или из обоих указанных запоминающих устройств. Компьютер содержит процессор для выполнения действий в соответствии с инструкциями, и одно или более запоминающих устройств для хранения инструкций и данных. Компьютер также может содержать одно или несколько массовых запоминающих устройств для хранения данных, таких как магнитный, магнитооптический или оптический диски, или может быть функционально соединен с указанными устройствами для приема данных с них, для передачи данных на них, или как для передачи, так и для приема данных. Однако компьютер необязательно имеет такие устройства. Устройства, пригодные для хранения компьютерных программных инструкций и данных содержит все виды энергонезависимой памяти, носители и запоминающие устройства, в том числе, например, полупроводниковые запоминающие устройства (например, EPROM, EEPROM, флеш-устройства и т.д.), магнитные диски (например, внутренние жесткие диски, съемные диски и т.д.), магнитооптические диски, а также диски CD-ROM и DVD-ROM. Процессор и запоминающее устройство могут быть дополнены логическими схемами специального назначения или могут быть встроены в них.
Для обеспечения взаимодействия с пользователем, операции могут быть реализованы на компьютере, оснащенном устройством отображения (например, монитором или устройством отображения другого типа), для вывода информации для просмотра пользователем, а также оснащенным клавиатурой и координатно-указательным манипулятором (например, «мышью», трекболом, планшетом, сенсорным экраном или координатно-указательным манипулятором другого типа), посредством которых пользователь может вносить информацию в компьютер. Для обеспечения взаимодействия с пользователем также возможно использование устройств других типов; например, обратная связь, обеспечиваемая пользователю, может представлять собой любую сенсорную обратную связь, например, визуальную обратную связь слуховую обратную связь или тактильную обратную связь; при этом входная информация от пользователя может поступать в любой форме, в том числе возможен акустический, речевой или тактильный ввод. Кроме того, компьютер может взаимодействовать с пользователем, направляя документы на используемое пользователем устройство и принимая документы с указанного устройства; например, направляя веб-страницы на веб-браузер на клиентском устройстве пользователя в ответ на запросы, получаемые от веб-браузера.
Клиент и сервер обычно удалены друг от друга и, как правило, взаимодействуют через коммуникационную сеть. К таким коммуникационным сетям можно отнести, например, локальную вычислительную сеть LAN (Local Area Network), глобальную вычислительную сеть WAN (Wide Area Network), межсетевую сеть (например, Интернет), сеть, содержащую спутниковый канал связи, и одноранговые сети (например, беспроводные самоорганизующиеся одноранговые сети). Отношения между клиентом и сервером осуществляются посредством компьютерных программ, запущенных на соответствующих компьютерах и имеющих между собой отношения сервер-клиент.
В некоторых аспектах настоящего изобретения, в ходе гидравлического разрыва пласта можно динамически выявлять преобладающие ориентации, заложенные в множестве трещин, связанных с микросейсмическими событиями. Например, плоскости трещин можно извлечь из данных микросейсмических событий, собираемых на площадке в режиме реального времени. Плоскости трещин можно выявлять по информации о микросейсмических событиях, содержащей: местонахождения событий, неопределенности измерения местонахождений событий, моментные магнитуды событий, время наступления событий и т.д. В каждый момент времени данные можно связать с ранее рассчитанными базовыми плоскостями, включающими в себя поддерживающее множество микросейсмических событий.
В некоторых аспектах настоящего изобретения, по собранным данным о микросейсмических событиях можно построить гистограмму или распределение вероятностей базовых плоскостей, при этом указанную гистограмму или распределение можно использовать для нахождения преобладающих ориентаций трещин. В некоторых случаях трещины, извлеченные вдоль преобладающих ориентаций, могут обеспечить оптимальную привязку к микросейсмическим событиям, происходящим в режиме реального времени. Гистограмма или распределение и преобладающие ориентации могут иметь значительную чувствительность к вновь поступающему микросейсмическому событию. Это значит, что некоторые плоскости, выявленные во время ассимиляции микросейсмических данных, могут оказаться неточными по сравнению с результатами обработки ретроспективных данных микросейсмических событий.
В некоторых аспектах настоящего изобретения, обеспечить меру точности плоскостей, выявленных в режиме реального времени, может параметр достоверности точности. Факторы, влияющие на достоверность точности плоскости, могут включать в себя собственные свойства события, отношение между поддерживающими событиями и плоскостью, и вес, отражающий направленность ориентации трещин по ретроспективным данным микросейсмических событий. В некоторых случаях, плоскости трещины, обладающие высокой достоверностью и выявленные в режиме реального времени, в конце гидравлического разрыва пласта согласуются с теми плоскостями трещины, которые были получены по ретроспективным данным.
В некоторых аспектах настоящего изобретения, некоторые или все раскрытые в данном документе признаки, могут быть скомбинированы или реализованы по-отдельности в одной или нескольких компьютерных программах автоматического картирования трещин в режиме реального времени. Программное обеспечение может быть реализовано в виде компьютерного программного продукта, установленного приложения, приложения клиент-сервер, Интернет-приложения, или любого другого программного обеспечения пригодного типа. В некоторых случаях, программа автоматического картирования трещин в режиме реального времени может динамически демонстрировать пользователям пространственную и временную эволюцию выявленных плоскостей трещины в режиме реального времени по мере постепенного накопления микросейсмических событий.
Динамика может предусматривать зарождение новых трещин, развитие и рост существующих трещин или другие динамические явления. В некоторых случаях, программа автоматического картирования трещин в режиме реального времени может обеспечивать пользователям возможность просмотра выявленных в режиме реального времени плоскостей трещины по нескольким уровням достоверности. В некоторых случаях, пользователи могут наблюдать пространственную и временную эволюцию трещин высокого уровня достоверности, которые могут демонстрировать преобладающие направленности совокупных данных микросейсмических событий. В некоторых случаях, программа автоматического картирования трещин в режиме реального времени может оценивать достоверность точности трещины, например, измерять достоверность выявленных плоскостей трещины. Значения достоверности точности могут помочь пользователям, например, лучше понять и проанализировать изменения в гистограмме вероятностей или в распределении ориентации, которые могут беспрерывно меняться по мере накопления микросейсмических событий в режиме реального времени. В некоторых случаях, программа автоматического картирования трещин в режиме реального времени может обеспечить результаты, согласующиеся с картированием трещин по ретроспективным данным. Например, в конце гидравлического разрыва пласта результаты, выдаваемые программой автоматического картирования трещин в режиме реального времени, могут быть статистически согласованными с результатами, выданными с использованием тех же самых данных программой автоматического картирования трещин, работающей на ретроспективных данных. Такие признаки могут позволить промысловым инженерам, операторам и аналитикам динамически визуализировать и контролировать пространственную и временную эволюцию трещин гидравлического разрыва, анализировать сложность трещин и геометрию коллектора, оценивать эффективность гидравлического разрыва пласта и улучшить эксплуатационные показатели скважины.
Хотя в настоящем описании содержатся много подробных сведений, их следует рассматривать не как ограничивающие объем заявленного изобретения, а лишь как раскрывающие признаки, специфические для конкретных примеров. Конкретные признаки, раскрытые в настоящем описании в контексте отдельных вариантов осуществления настоящего изобретения, могут быть также скомбинированы. В свою очередь, разнообразные признаки, раскрытые в контексте одного варианта осуществления настоящего изобретения, могут быть также осуществлены во многих вариантах осуществления настоящего изобретения, как отдельно, так и в любом уместном сочетании.
Выше были раскрыты несколько вариантов осуществления настоящего изобретения. Тем не менее, следует понимать, что в настоящее изобретение можно внести различные модификации. Что означает, что другие варианты осуществления настоящего изобретения находятся в пределах объема, определяемого прилагаемой формулой изобретения.
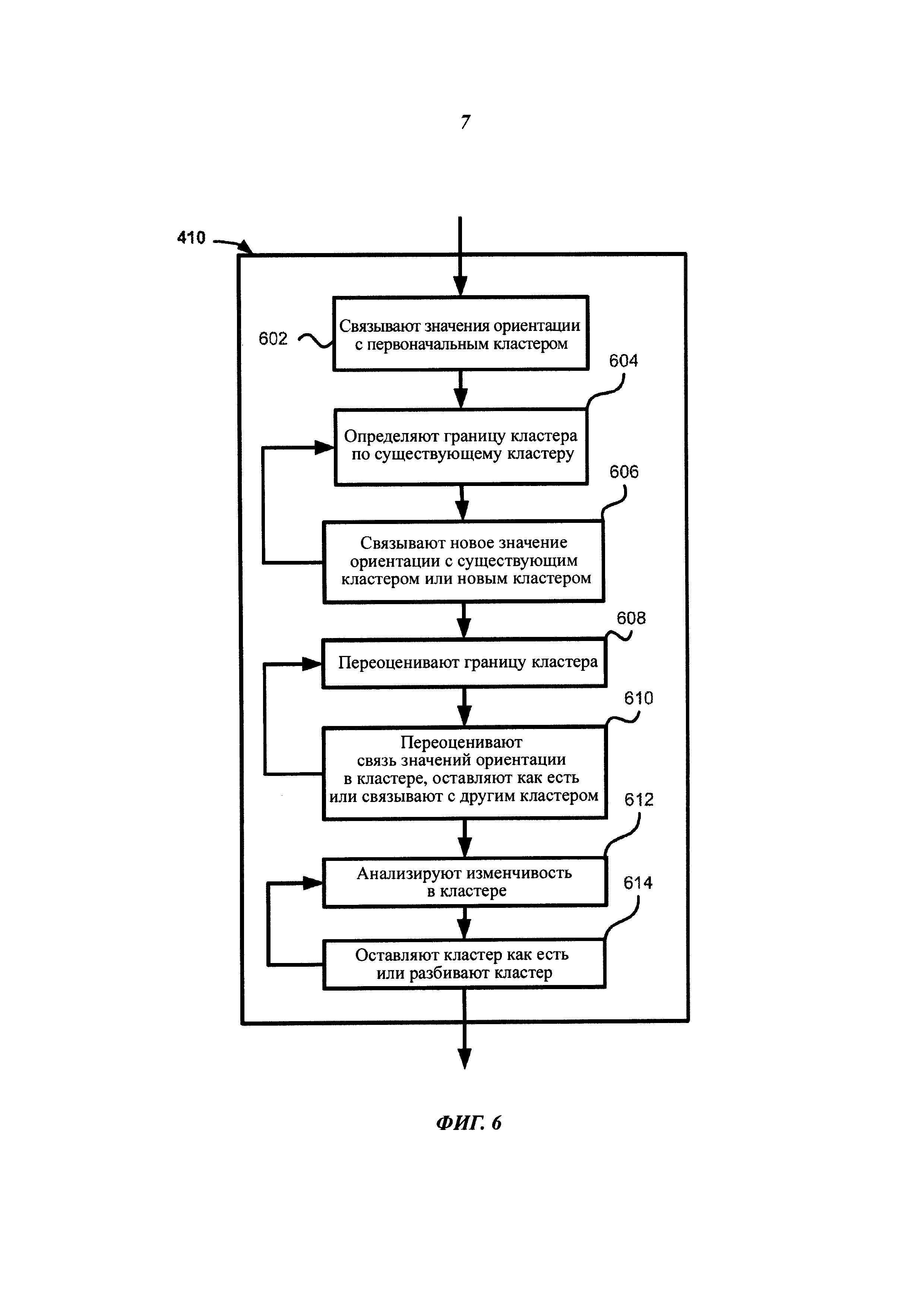
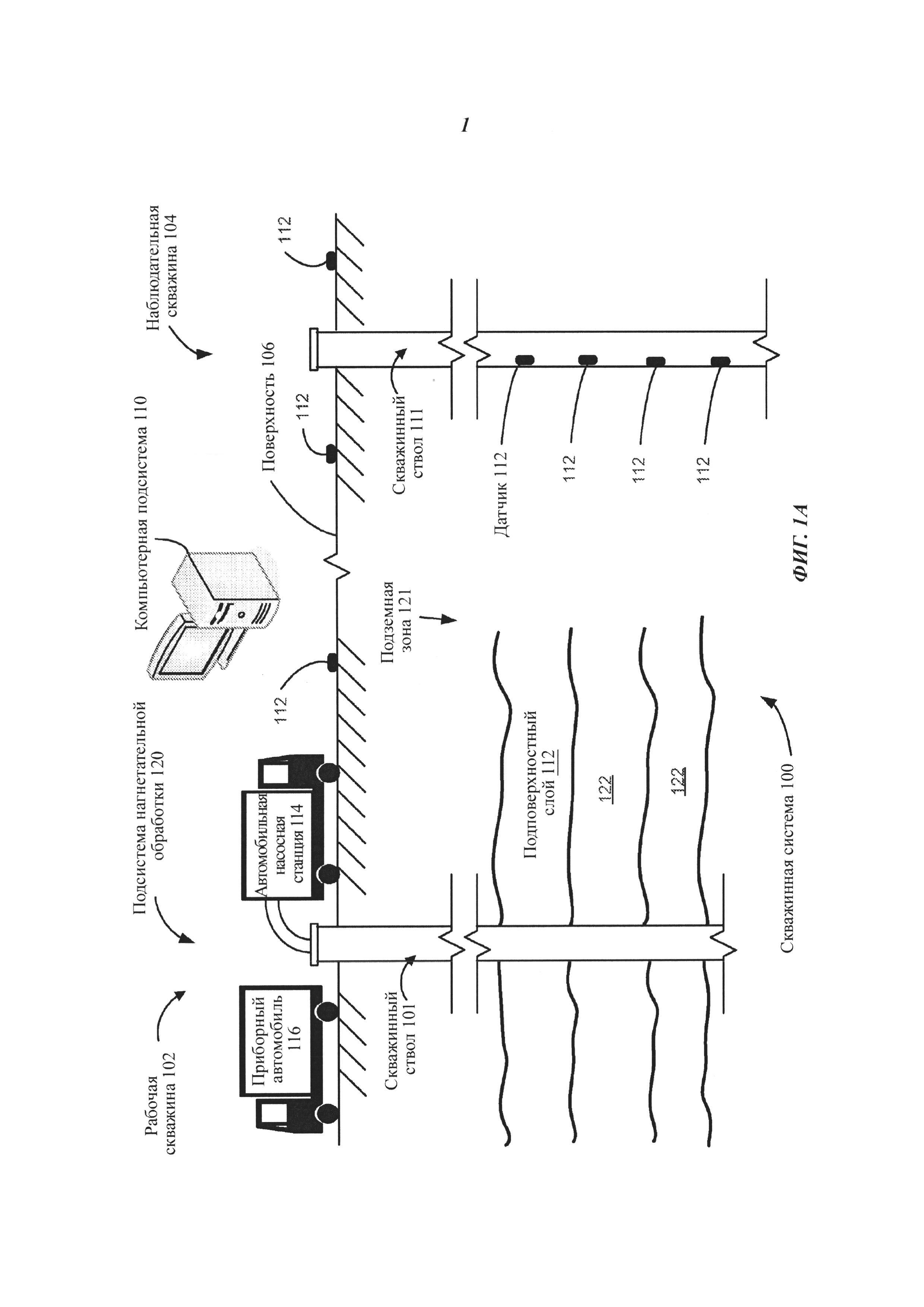
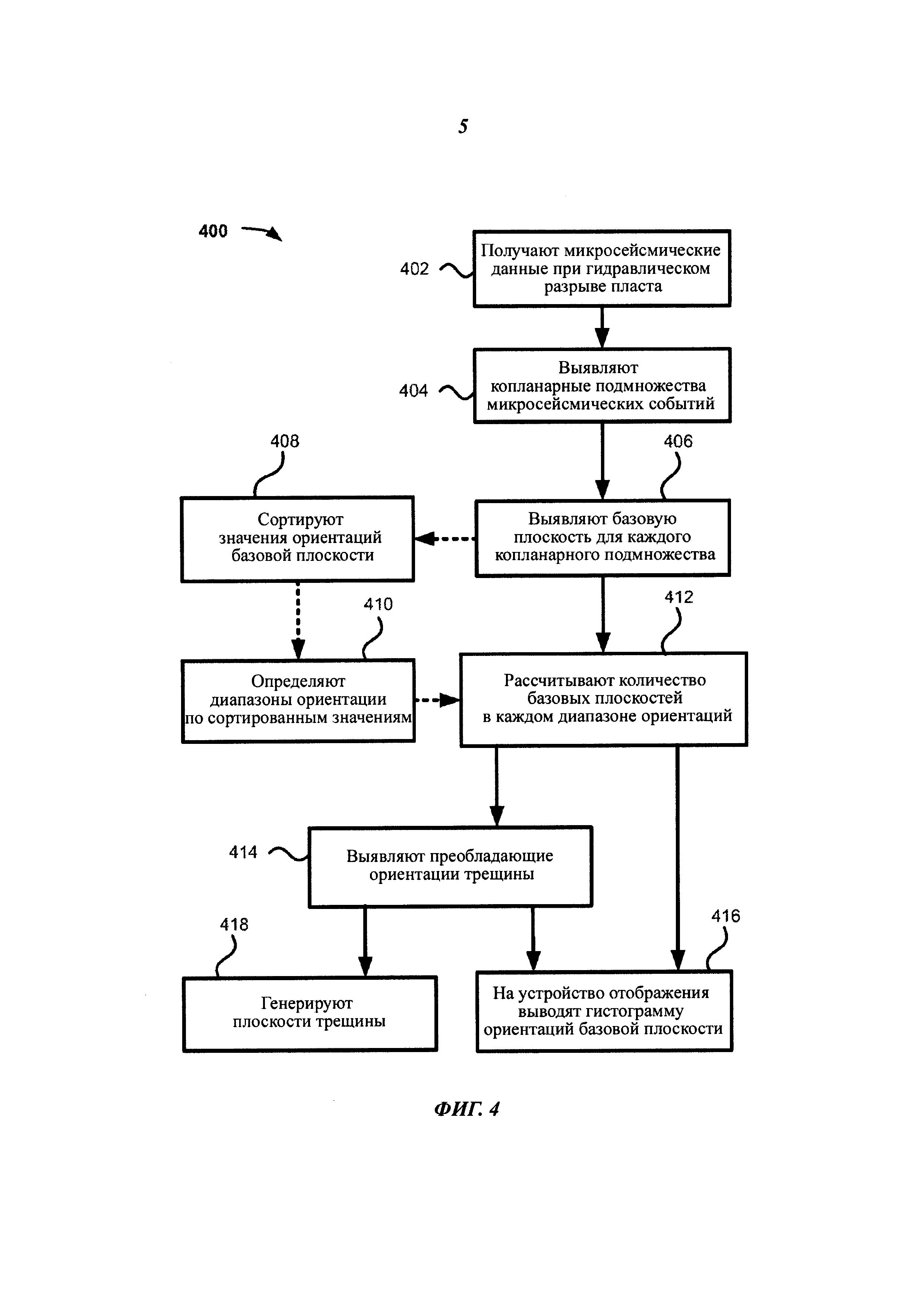
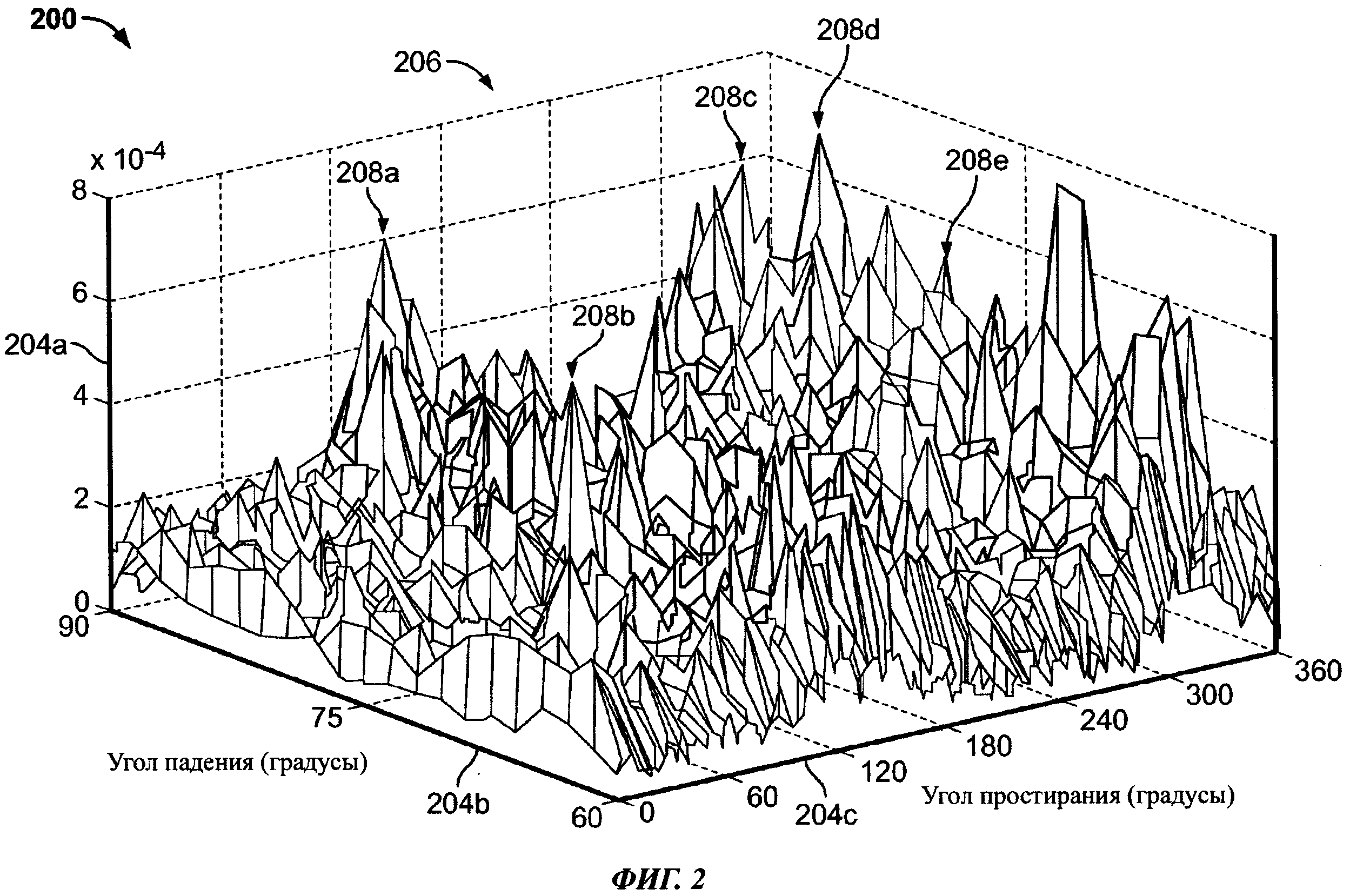
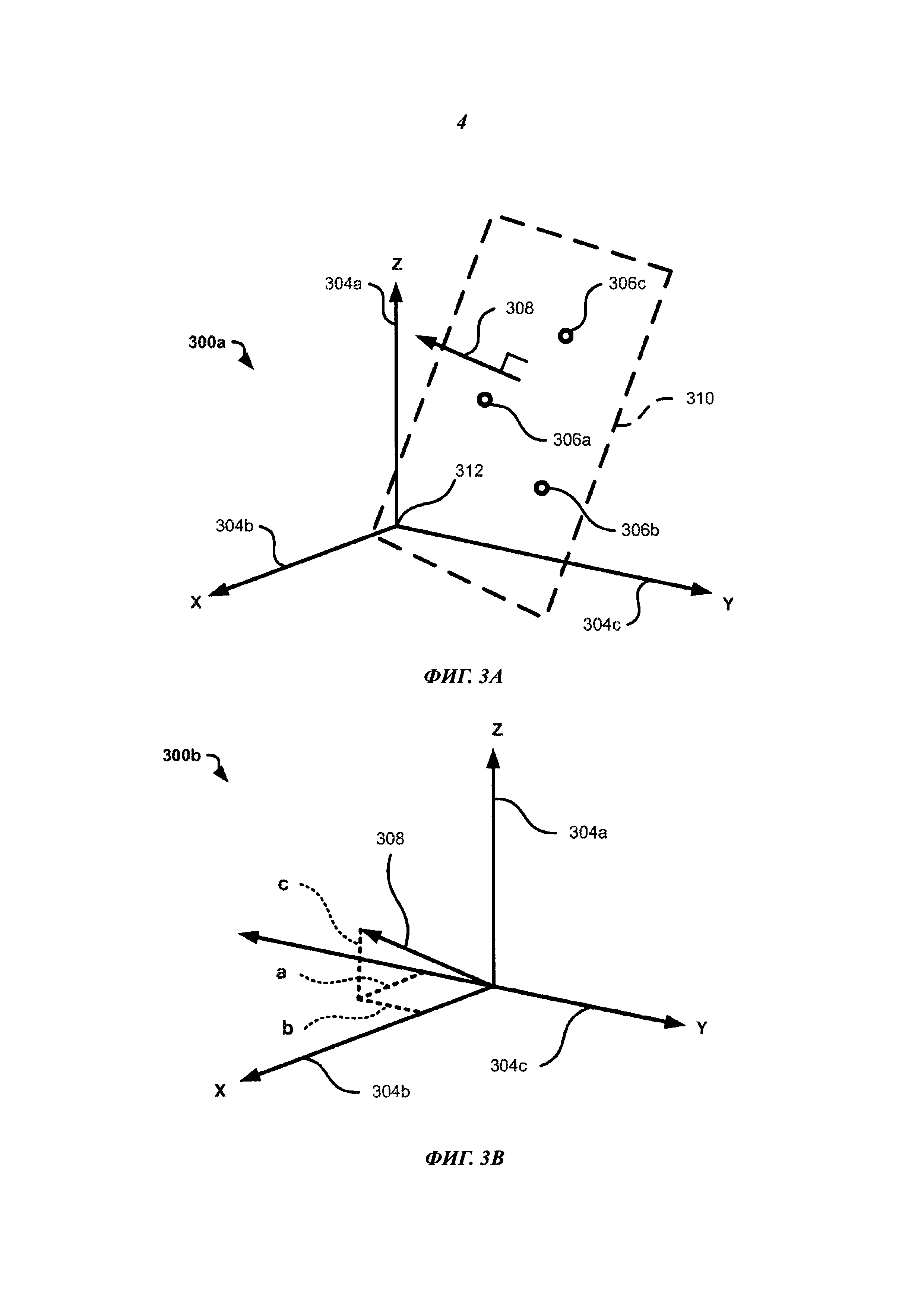
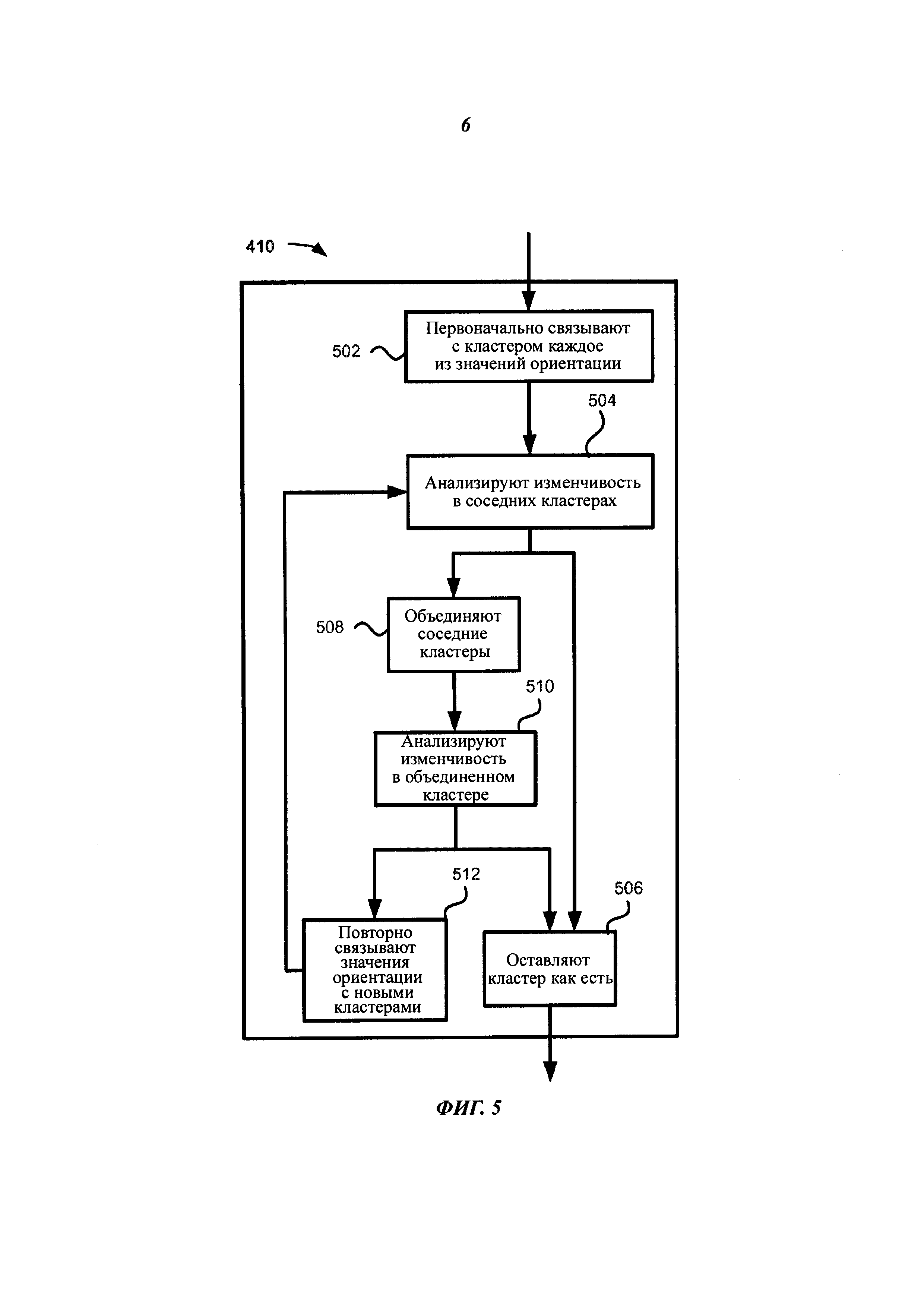
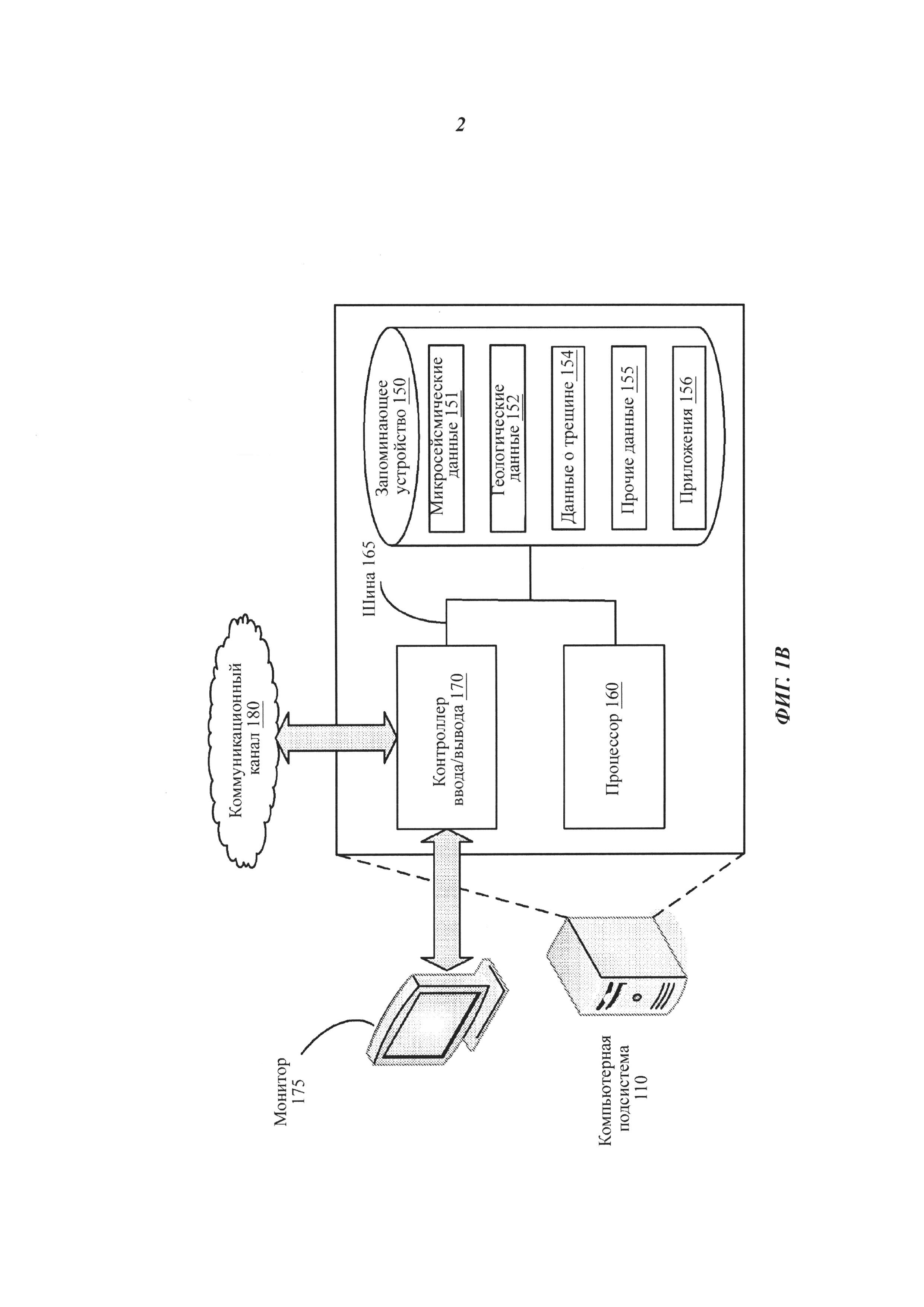
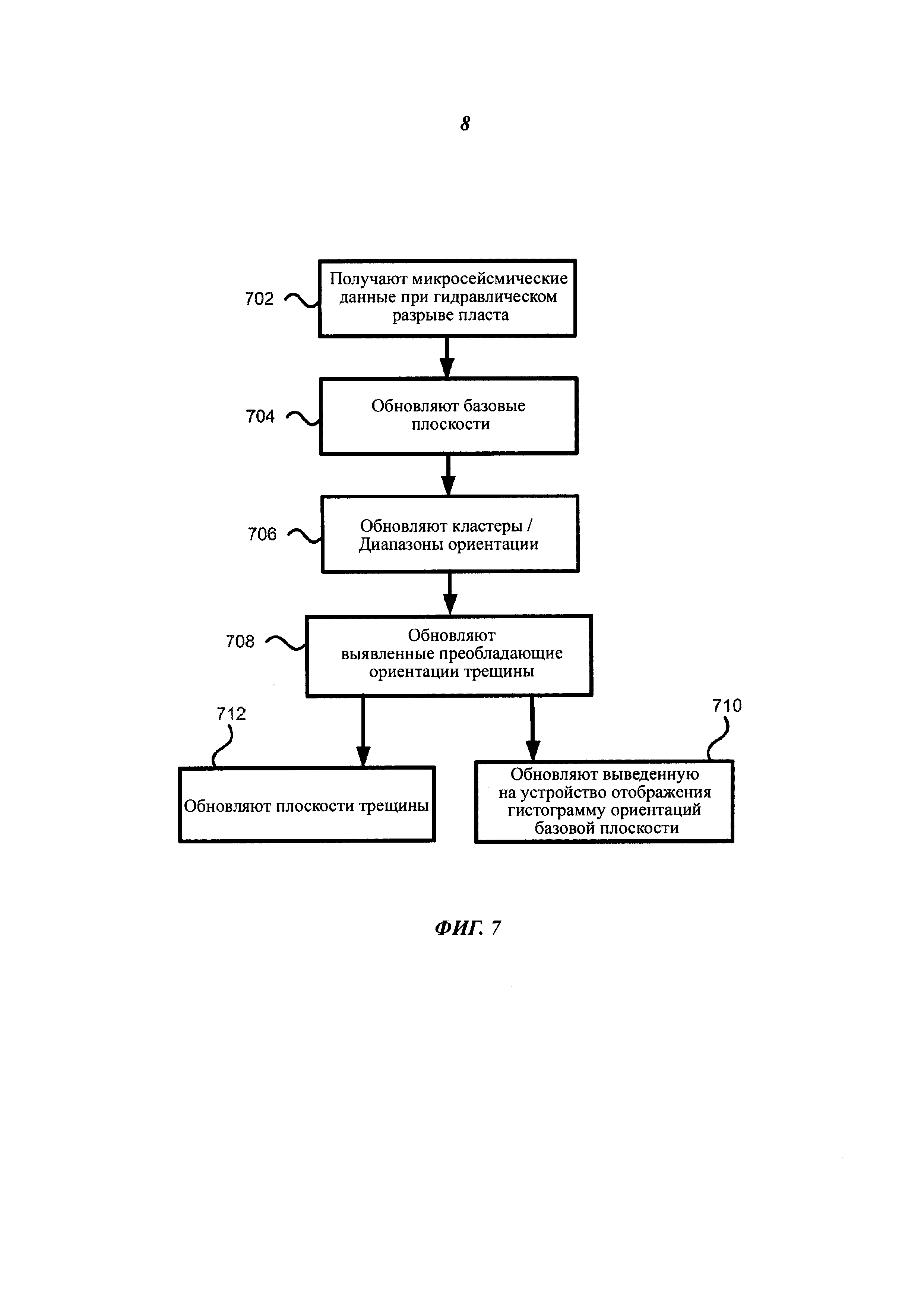
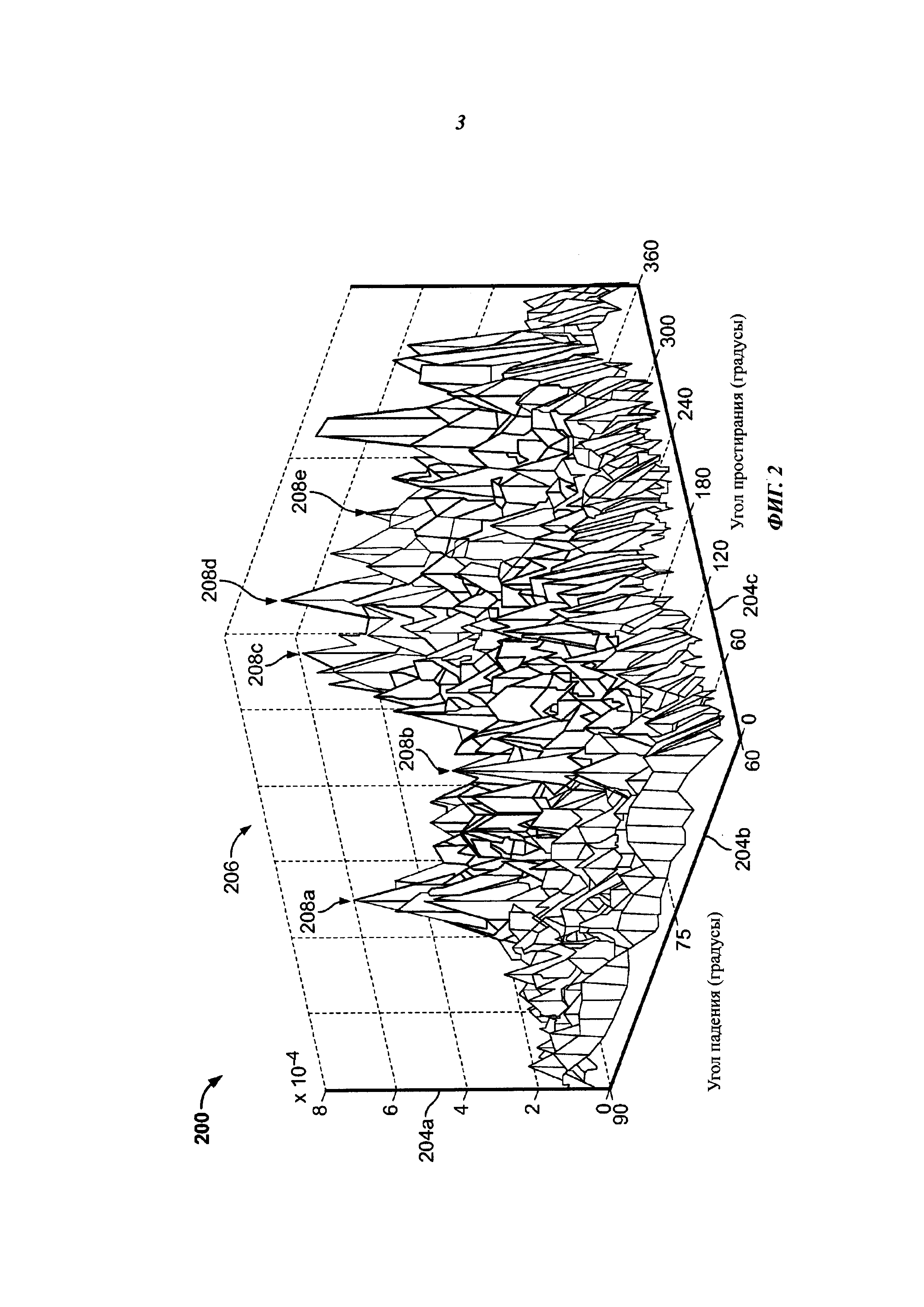
Дифференциальный скважинный инструмент и способ его применения
Узел оборудования для отклонения бура и снаряда для заканчивания скважины
Устройство и способ удаления обломков из скважинного флюида в стволе скважины
Устройство для направления флюида с узлом переключения потока в зависимости от давления
Составной центратор
Система и способ автоматической калибровки нагрузки на датчик бурового долота и регулирования изгиба бурильной колонны
Буровое долото для выполнения электромагнитных измерений в подземном пласте
Прокладка линий через уплотнительные элементы пакерного узла и предотвращение экструзии указанных уплотнительных элементов
Способы инициирования новых разломов в законченном стволе скважины, уже содержащем разломы
Поршневая тянущая система, используемая в подземных скважинах
Дифференциальный скважинный инструмент и способ его применения
Узел оборудования для отклонения бура и снаряда для заканчивания скважины
Устройство и способ удаления обломков из скважинного флюида в стволе скважины
Устройство для направления флюида с узлом переключения потока в зависимости от давления
Составной центратор
Система и способ автоматической калибровки нагрузки на датчик бурового долота и регулирования изгиба бурильной колонны
Буровое долото для выполнения электромагнитных измерений в подземном пласте
Прокладка линий через уплотнительные элементы пакерного узла и предотвращение экструзии указанных уплотнительных элементов
Способы инициирования новых разломов в законченном стволе скважины, уже содержащем разломы
Поршневая тянущая система, используемая в подземных скважинах

