Результат интеллектуальной деятельности: ЛИНЕЙНЫЙ ПРИВОД
Вид РИД
Изобретение
Настоящее изобретение относится к линейному приводу, в частности, используемому для перемещения платформы системы моделирования, установленной на шестистоечную конструкцию.
Изобретение относится к области приводов кинематических систем, используемых, например, для тренажеров полета и управления транспортным средством. Тренажеры, к которым применяется изобретение, представляют собой тренажеры, содержащие, например, настоящую пилотажную или водительскую кабину. Использование настоящей кабины означает, что тренажер имеет вес и размер, которые являются значительными.
Чтобы содержать тренажеры, уменьшить стоимость инфраструктуры, в которой размещены тренажеры, и стоимость энергии, которую необходимо подать, чтобы привести в движение тренажер, становится все более обычным использование электрических приводов движения вместо гидравлических приводов движения.
Одна из проблем, связанных с использованием электрических приводов движения, относится к необходимости учитывать статические силы, связанные с перемещаемым грузом, и динамические силы, связанные с весом и инерцией перемещаемого груза.
Доступны различные решения компенсации, такие как пневматическая компенсация и гидравлическая компенсация.
Система пневматической компенсации работает, в частности, с аккумуляторами и компрессором. Компрессор сжимает газ в аккумуляторах. Аккумуляторы где-то связаны с приводом или с компенсационным цилиндром. Система пневматической компенсации обеспечивает относительно постоянную однонаправленную силу.
Система гидравлической компенсации работает, в частности, с аккумуляторами и гидравлической установкой. Гидравлическая установка сжимает масляный раствор в аккумуляторах. Аккумуляторы связаны с приводом. Система гидравлической компенсации также обеспечивает относительно постоянную, однонаправленную силу.
Решения пневматической и гидравлической компенсации имеют следующие основные недостатки:
- они занимают большую площадь на земле;
- они дороги в производстве и обслуживании;
- они подпадают под стандарты использования оборудования давления, которые являются очень ограничивающими; и
- они не приспосабливаются хорошо в соответствии с изменениями статической силы, приложенной к приводу, поскольку сила компенсации является относительно постоянной.
Более того, системы пневматической компенсации требуют относительно длительного времени для запуска, добавляя еще одно ограничение для использования в тренажере.
Одной из задач настоящего изобретения является, в частности, устранение вышеупомянутых недостатков. Для решения этой задачи предметом изобретения является линейный привод, подходящий для обеспечения подвижности грузу. Линейный привод содержит:
стойку, связанную с грузом одним из своих концов с помощью шарового шарнира с тремя степенями свободы вращения;
пластину, которая подвижна в передвижении вдоль оси, принадлежащей плоскости основания привода, при этом подвижная пластина механически связана со стойкой другим ее концом.
Привод также содержит, по меньшей мере, один первый упругий кабель, прикрепленный одним из его концов к подвижной пластине, и прикрепленный другим его концом к опоре, являясь сцепленным с первым шкивом, прикрепленным к опоре.
В особенно предпочтительном варианте осуществления первый упругий кабель и первый шкив могут быть расположены так, чтобы получить устойчивое равновесие для линейного привода.
В другом варианте осуществления первый упругий кабель может быть прикреплен к первой боковой части подвижной пластины. Линейный привод может содержать, по меньшей мере, один второй упругий кабель, прикрепленный одним из его концов ко второй боковой части подвижной пластины и прикрепленный другим его концом к опоре. Второй упругий кабель сцеплен со вторым шкивом, прикрепленным к опоре. Первый и второй упругие кабели, первый шкив и второй шкив расположены так, чтобы получить устойчивое равновесие для линейного привода.
Первый упругий кабель и второй упругий кабель могут действовать на подвижную пластину в одном направлении.
В другом варианте осуществления изобретения первый упругий кабель и второй упругий кабель могут действовать на подвижную пластину в противоположных направлениях.
Упругие кабели могут быть амортизирующими шнурами.
В особенно предпочтительном варианте осуществления первый кабель и второй кабель могут иметь различную жесткость.
Другим предметом изобретения является привод шестистоечной конструкции, содержащий, по меньшей мере, один линейный привод согласно изобретению.
Преимущественно привод шестистоечной конструкции может быть использован для обеспечения подвижности платформы системы моделирования.
Преимущественно привод шестистоечной конструкции может быть использован для обеспечения подвижности платформы системы моделирования управляющего устройства подвижного транспортного средства.
Главные преимущества изобретения заключаются, в частности, в том, что оно надежно и обеспечивает хорошую устойчивость с течением времени.
Другие отличительные признаки и преимущества изобретения будут вытекать из последующего описания, приведенного в качестве неограничивающей иллюстрации, и в свете прилагаемых чертежей, на которых:
Фиг. 1 - шестистоечное устройство позиционирования, использующее, по меньшей мере, один привод согласно изобретению;
Фиг. 2 - привод согласно изобретению;
Фиг. 3 - система компенсации привода согласно изобретению;
Фиг. 4 - пример задания размеров системы компенсации привода согласно изобретению и
Фиг. 5 - другой вариант осуществления системы компенсации привода согласно изобретению.
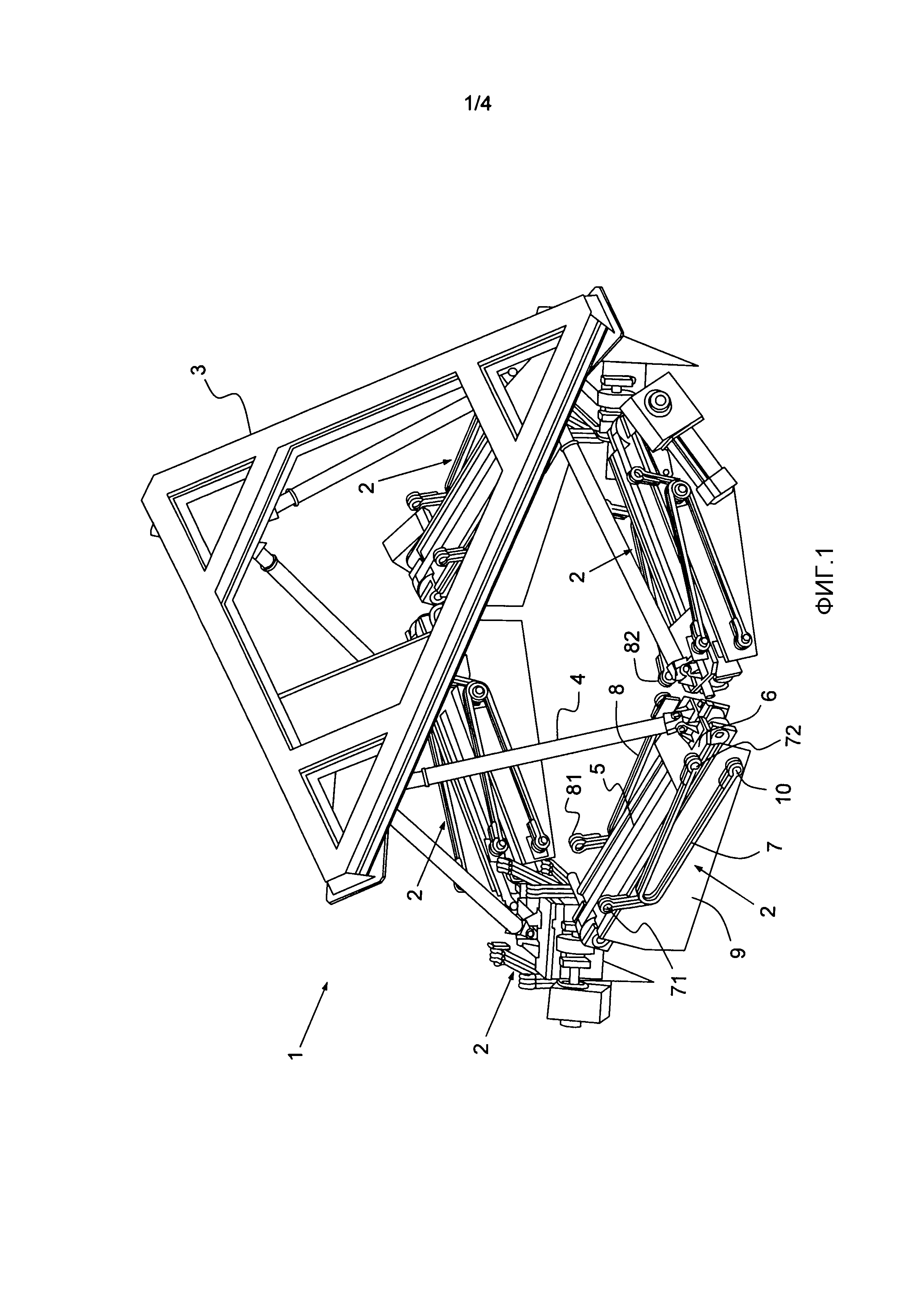
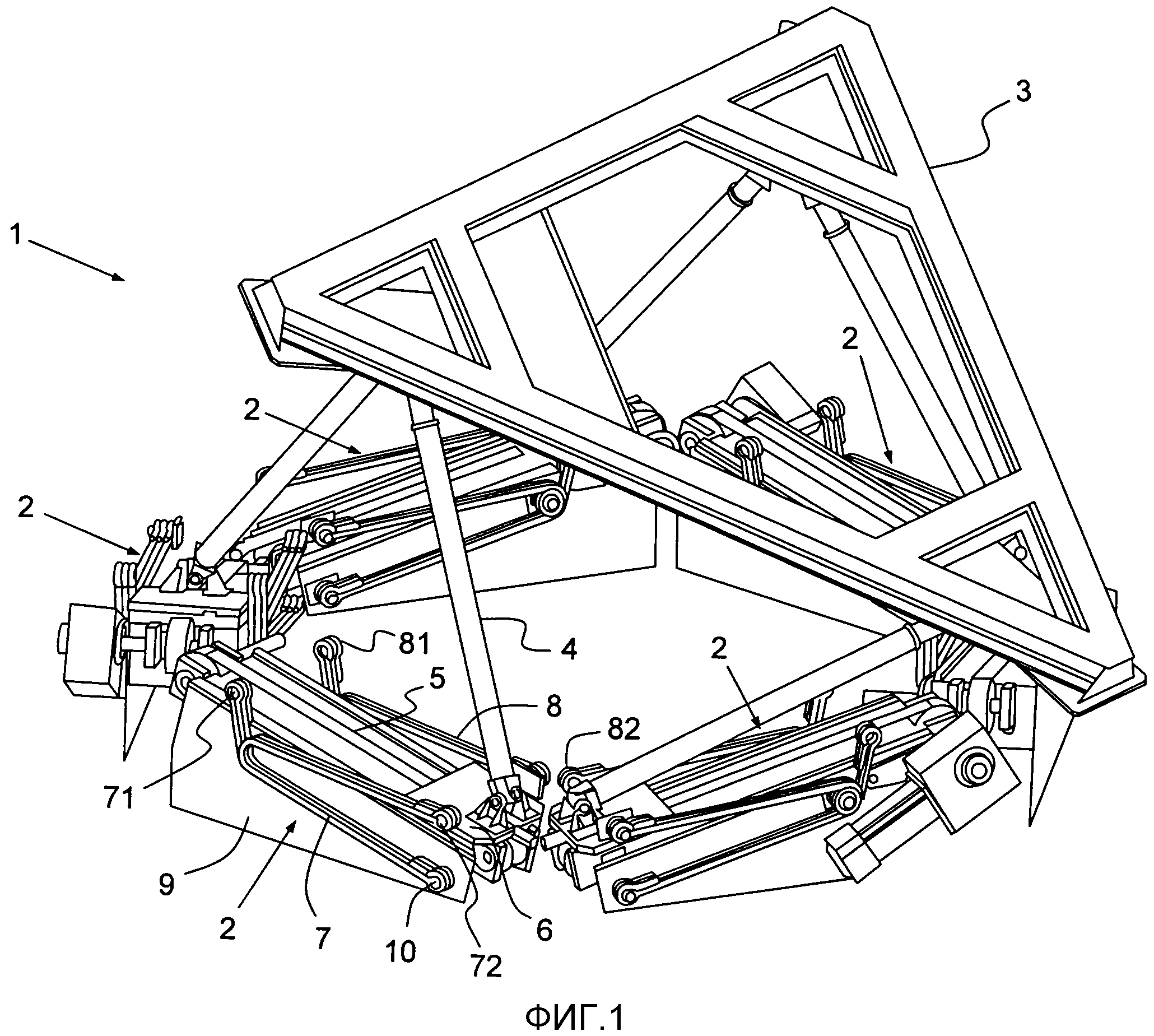
Фиг. 1 представляет шестистоечное устройство 1 позиционирования, содержащее, по меньшей мере, один привод 2 согласно изобретению. Шестистоечное устройство 1 позиционирования может приводить подвижную платформу 3 в движение. Шестистоечное устройство 1 позиционирования может быть выполнено согласно концепции платформы Стюарта, допускающей движение подвижной платформы 3 в соответствии с шестью степенями свободы. Три степени свободы передвижения, три степени свободы вращения согласно углам наклона, поворота и рыскания, иначе называемым углами Эйлера. Платформы Стюарта, в частности, используются для производства тренажеров по дизайну К. Каппела. Платформы Стюарта формируют часть семейства параллельных роботов.
Шестистоечное устройство 1 позиционирования, в частности, содержит 6 приводов. Груз платформы 3 распределен по шести приводам шестистоечного устройства 1 позиционирования. Например, шесть приводов могут быть приводами 2 согласно изобретению. В другом примерном варианте осуществления шестистоечное устройство позиционирования может содержать, по меньшей мере, один привод 2 согласно изобретению и другие приводы согласно предшествующему уровню техники. Привод 2 согласно изобретению, в частности, содержит стойку 4, которая может, например, быть представлена прицепным шатуном и иметь постоянную длину или цилиндром и иметь переменную длину. Каждая стойка 4 соединена верхним концом с подвижной платформой 3 через шаровой шарнир с тремя степенями свободы вращения, не представленный на Фиг. 1. Шаровой шарнир прикреплен к подвижной платформе 3. Нижние концы каждой стойки могут быть смещены вдоль прямолинейного сегмента. Прямолинейный сегмент может быть представлен рампой 5, например, наклонной, на которой перемещается каретка 6. Следовательно, каретка 6 перемещается вдоль оси, которая, по существу, параллельна рампе 5. Нижний конец стойки 4 может быть установлен на каретку, с тем чтобы иметь степень свободы вращения вокруг оси, которая, например, по существу, перпендикулярна рампе 5. Привод 2 согласно изобретению может также содержать первое упругое устройство компенсации, содержащее, по меньшей мере, один упругий кабель 7, 8. На Фиг. 1 и для примера первое устройство компенсации содержит два упругих кабеля 7, 8. Первый кабель 7 первого упругого устройства компенсации может быть соединен одним из его концов, например, с первой боковой частью корпуса 9, на котором закреплена рампа 5. Корпус 9 может, например, быть размещен прямо на земле. Корпус 9 неподвижен по определению. Первый кабель 7 первого упругого устройства компенсации может быть соединен другим из его концов, например, с первой частью каретки 6. Второй упругий кабель 8 первого упругого устройства компенсации может быть соединен одним из его концов, например, со второй боковой частью корпуса 9 посредством первого стационарного узла 10 крепления. Второй упругий кабель 8 первого упругого устройства компенсации может быть соединен другим из его концов со второй частью каретки 6. Различные узлы крепления упругих кабелей первого устройства компенсации на корпусе 9 и на каретке 6 приведены в качестве примера и могут быть приспособлены согласно различным другим конфигурациям шестистоечного устройства 1 позиционирования. На Фиг. 1 упругий компенсатор, согласно изобретению, изображен в соответствии с двумя из всех возможных положений: первое положение 71, 81, в котором каретка 6 находится в первом конце рампы 5, и второе положение 72, 82, в котором каретка находится во втором конце рампы 5.
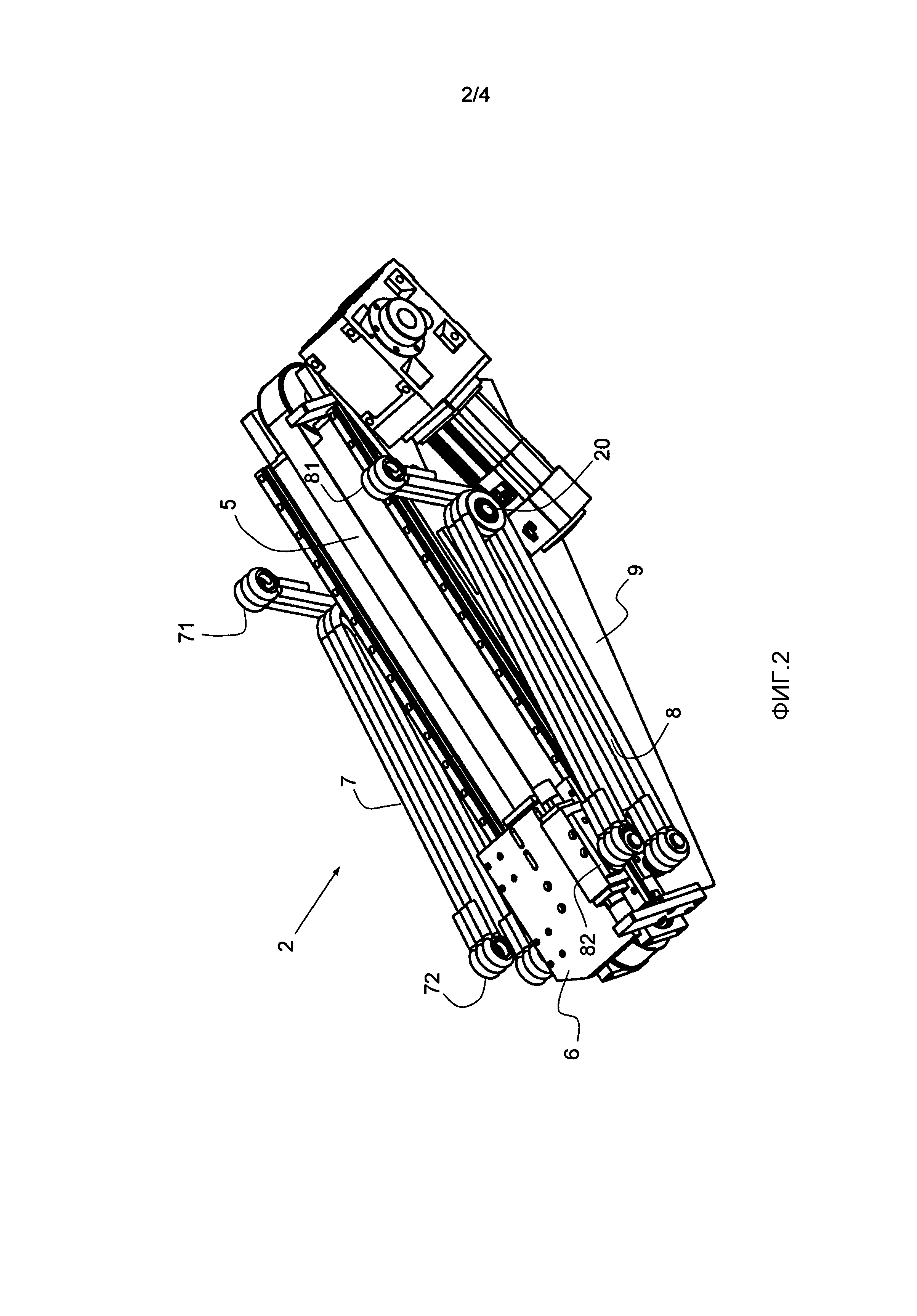
Фиг. 2 изображает местный вид привода 2 согласно изобретению. Фиг. 2, в частности, изображает первый и второй упругие кабели 7, 8, как изображено на Фиг. 1.
Фиг. 2 также изображает два из возможных положений каретки 6 на рампе 5: первое положение 71, 81, в котором каретка находится в первом конце рампы 5, и второе положение 72, 82, в котором каретка находится во втором конце рампы 5. Первое положение 71, 81 может быть так называемым "нижним" положением, а второе положение 81, 82 может быть так называемым "верхним" положением.
Первый шкив 20 прикреплен к первой боковой части корпуса 9. Второй упругий кабель 8 сцеплен с первым шкивом 20, чтобы следовать за движением каретки 6 вдоль рампы 5 из первого положения 71, например, нижнего положения, во второе положение 81, например, верхнее положение. Первый шкив 20 является, в частности, возвратным шкивом.
Второй шкив, не представленный на Фиг. 2, прикреплен ко второй боковой части корпуса 9. Первый упругий кабель 7 сцеплен со вторым шкивом, чтобы следовать за движением каретки 6 вдоль рампы 5 из первого нижнего положения 71 во второе верхнее положение 81. Второй шкив является, в частности, возвратным шкивом.
Такая конфигурация устройства компенсации преимущественно позволяет применить к каретке возвратную силу, которая изменяется в соответствии с положением каретки 6 на рампе 5. Возвратная сила вызывается первым и вторым упругими кабелями, которые действуют в одном направление на Фиг. 2. Например, для устройства, как показано на Фиг. 2, возвратная сила является:
- максимальной, когда каретка 6 находится в первом нижнем положении 71;
- равной нулю, когда каретка вертикальна по отношению к первому и второму шкивам 20;
- противоположно направленной, когда каретка 6 находится во втором верхнем положении 81.
Преимущественно такое устройство компенсации позволяет вернуть каретку 6 в положение устойчивого равновесия, то есть в положение, для которого возвратная сила равна нулю, без подачи дополнительной энергии. Такая способность позволяет увеличить безопасность устройства позиционирования, поскольку, если возникает проблема, привод, согласно изобретению, возвращается в устойчивое равновесие, не требуя подачи дополнительной энергии. Это особенно предпочтительно, когда источники энергии неисправны.
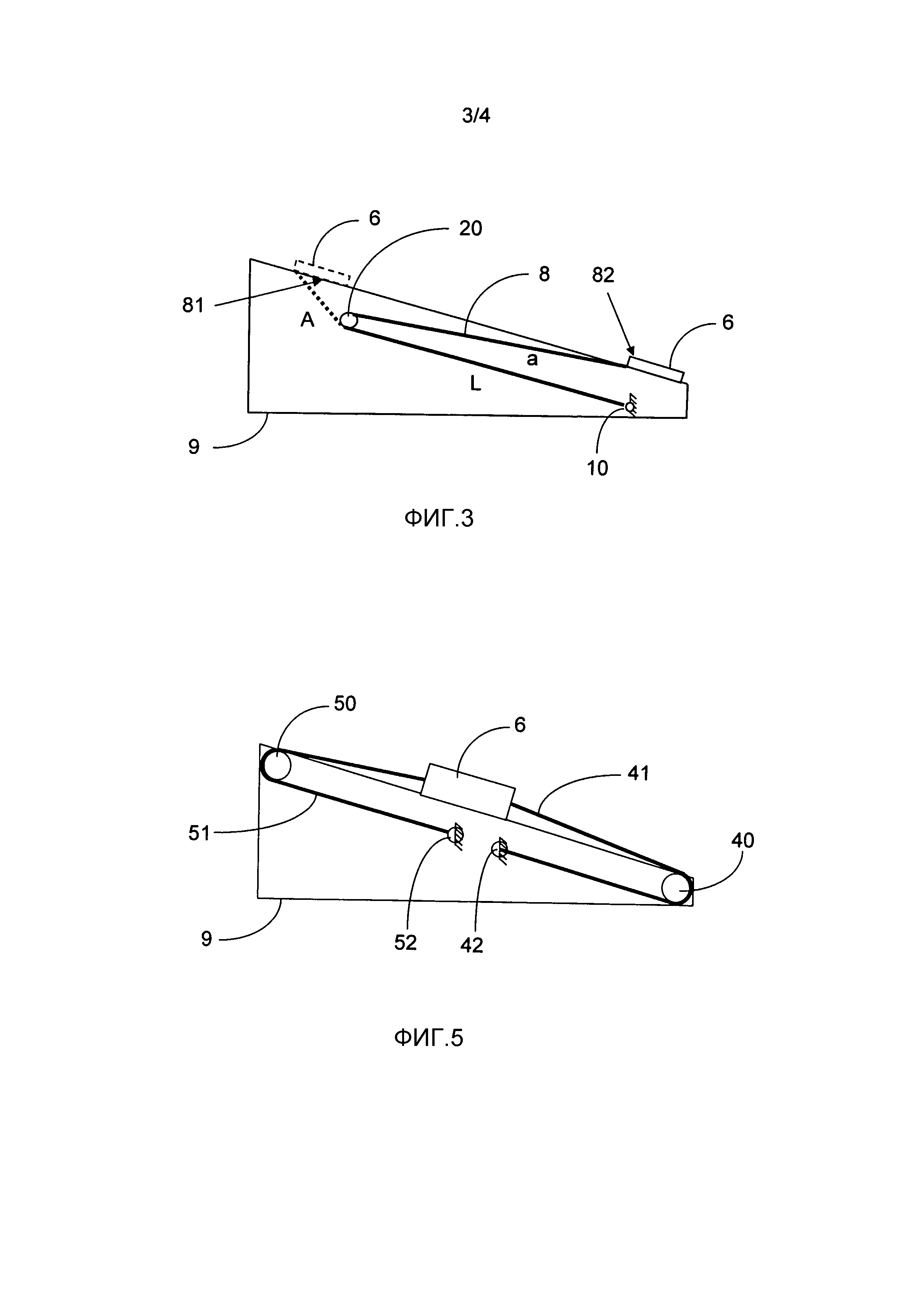
Фиг. 3 схематично изображает в профиль часть привода согласно изобретению. Фиг. 3, в частности, изображает второй упругий кабель 8, корпус 9, каретку 6 в двух крайних положениях 81, 82 и второй шкив 20.
В особенно предпочтительном примерном варианте осуществления первого устройства компенсации упругие кабели 7, 8 могут быть амортизирующими шнурами, то есть упругими кабелями, состоящими из сердечника, выполненного из резины, и оболочки, выполненной, например, из ткани, включая, например, петли на каждом конце, чтобы прикрепить их.
Упругие кабели 7, 8 первого устройства компенсации имеют функцию возврата. Таким образом, любое возвратное устройство, такое как пружина, может быть использовано вместо упругих кабелей 7, 8. Однако использование, например, кабелей, выполненных из эластомера, является преимущественно недорогим. Преимущественно первое устройство компенсации может быть выполнено согласно требуемым размерам и сконфигурировано согласно характеристикам, в частности упругости, используемого эластомера. Подобным образом характеристики используемого эластомера могут быть выбраны как функция размеров и характеристик привода согласно изобретению и, более широко, устройства позиционирования, частью которого, согласно изобретению, является привод. Преимущественно первое устройство компенсации, изображенное на Фиг. 3, содержит мало компонентов.
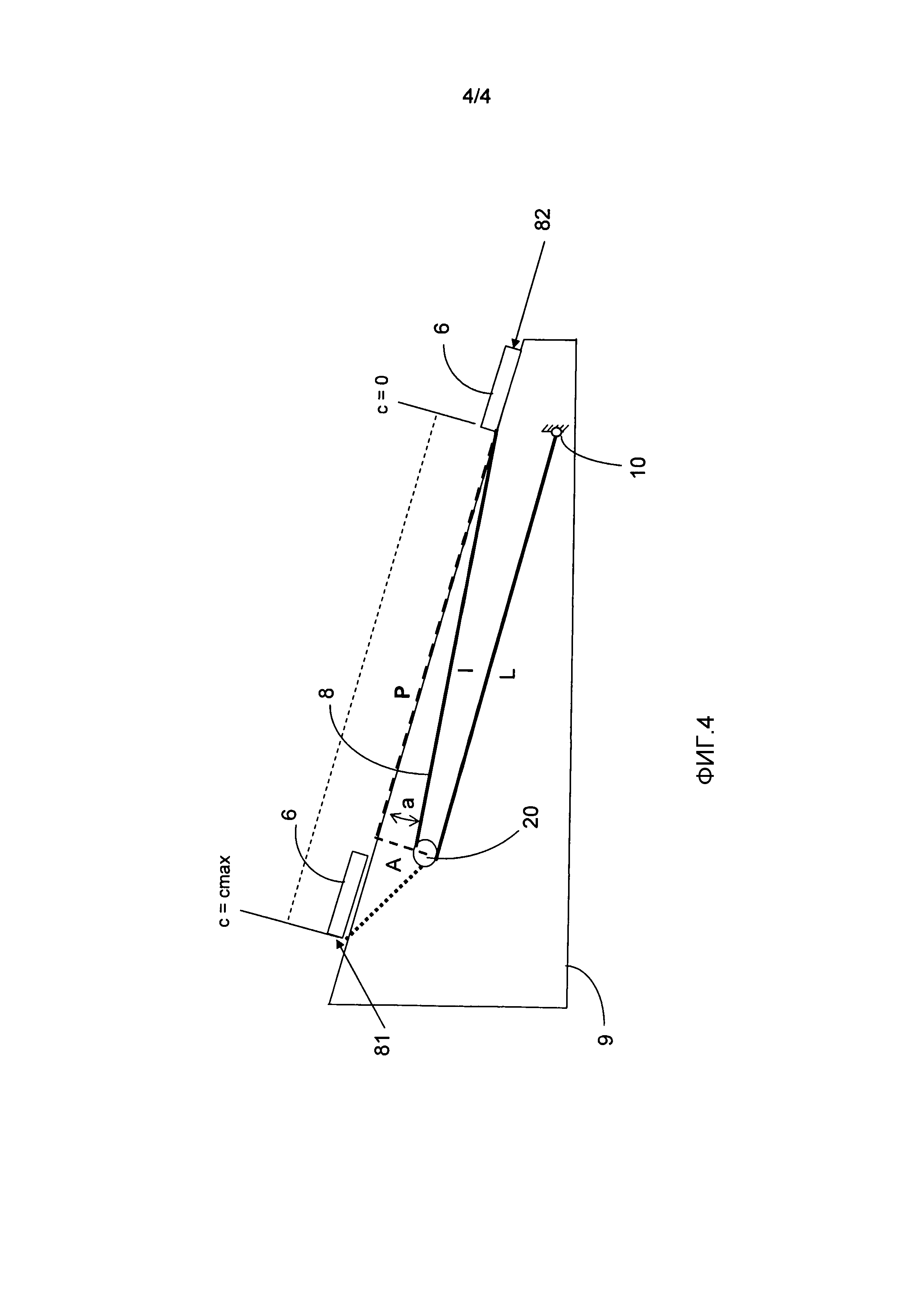
Фиг. 4 представляет пример расположения упругих кабелей 7, 8 по отношению к приводу согласно изобретению для того, чтобы быть в состоянии генерировать силы компенсации в обоих направлениях смещения каретки 6 линейного привода 2 согласно изобретению. Фиг. 4, как и Фиг. 3, показывает вид устройства в профиль. Расположение первого кабеля 7 выполнено таким же образом, как и расположение второго кабеля 8, как описано ниже.
Расположение и определение размеров кабелей 7, 8 может быть определено следующим образом:
- определение статических сил, которые будут подаваться кабелями 7, 8 согласно смещению каретки 6, чтобы получить компенсацию, которая наилучшим образом подходит для линейного привода согласно изобретению;
- определение положения кабелей 7, 8, которое позволяет воспроизвести эти силы.
Формулы для определения размеров привода согласно изобретению могут быть следующими:
I=L+sqrt(A2+(P-c)2) (1000),
sin(a)=A/(I-L)=A/sqrt( A2+(P-c)2) (1001),
f=F(I/I0) * cos(a) (1002),
в которых:
P может быть положением второго шкива 20, спроецированным на ось смещения каретки 6, при этом P, например, измерено по отношению к узлу крепления второго кабеля 8 на каретке 6, когда каретка 6 находится во втором нижнем положении 82, P может быть независимым от перемещения каретки;
A может быть положением второго шкива 20, спроецированным на ось, которая, по существу, ортогональна оси смещения каретки 6, при этом P измерено по отношению к узлу крепления второго кабеля 8 на каретке 6, A может быть независимым от перемещения каретки;
L может быть расстоянием между первым стационарным узлом 10 крепления второго кабеля 8 на корпусе 9 и шкивом 20, при этом L, возможно, независимо от перемещения каретки 6;
c может представлять длину перемещения каретки 6: когда каретка находится во втором нижнем положении 82, c, например, равно нулю, а когда каретка находится в первом верхнем положении 81, с, например, равно cmax;
a может быть углом между осью смещения каретки 6 и прямой линией, проходящей через центр второго шкива 20 и первый стационарный узел 10 крепления;
I может быть длиной эластомера между вторым шкивом 20 и узлом крепления второго кабеля 8, при этом I меняется в соответствии с положением каретки 6 на рампе 5;
I0 может быть длиной второго кабеля 8 в состоянии провисания, то есть длиной второго кабеля 8, когда он не прикреплен;
F может быть возвратной силой, с которой кабель 8 действует на каретку 6, возвратная сила может зависеть от длины кабеля 8 и, в частности, от соотношения I/I0 и от упругости кабеля 8, при этом упругость зависит от материала, используемого для изготовления кабеля 8, следовательно, F может быть функцией, зависящей от I/I0;
f может быть проекцией на ось смещения возвратной силы, которая вызывается вторым кабелем 8 на каретке 6.
Среди этих параметров c зависит от условий использования привода согласно изобретению; следовательно, с является постоянным параметром. Подобным образом значения f для c=0 и c=cmax зависят от использования привода согласно изобретению, следовательно, f постоянно.
Чтобы облегчить установку привода согласно изобретению, I0 может быть выбрано таким, что I0=L+A: таким образом, f для c=P равно нулю.
Следует отметить, что определение размеров привода осуществляется одинаково при использовании одного или двух кабелей, поскольку силы распределены одинаково на обоих кабелях.
Фиг. 5 изображает пример второго варианта осуществления линейного привода согласно изобретению. Фиг. 5 представляет собой изображение в профиль части привода 2 согласно изобретению.
Второй вариант осуществления линейного привода 2 согласно изобретению, как представлено на Фиг. 2, например, может содержать второе устройство компенсации, содержащее четыре упругих кабеля 41, 51. Четыре упругих кабеля 41, 51 заменяют первый и второй упругие кабели 7, 8, представленные на Фиг. 1, 2, 3, 4. На Фиг. 5 только два кабеля 41, 51 представлены для примера, при этом другие два кабеля расположены симметрично третьему и четвертому упругим кабелям 41, 51 относительно оси смещения каретки 6. В другом варианте осуществления можно использовать только два упругих кабеля 41, 51, при этом два упругих кабеля расположены таким образом, чтобы действовать как четыре упругих кабеля, приведенные в примере.
Второе устройство компенсации, в частности, содержит третий кабель 41. Третий кабель 41 может быть прикреплен, с одной стороны, к каретке 6 и, с другой стороны, к корпусу 9 через второй стационарный узел 42 крепления. Третий упругий кабель 41 сцеплен с третьим шкивом 40, прикрепленным к корпусу 9. Третий шкив 40 может быть расположен, например, вертикально по отношению к нижнему окончанию перемещения каретки 6. Другие положения также могут быть предусмотрены без ущерба для преимуществ, которые обеспечивает вторая система компенсации.
Второе устройство компенсации также содержит четвертый кабель 51, прикрепленный, с одной стороны, к каретке 6 и, с другой стороны, к корпусу 9 через третий стационарный узел 52 крепления. Четвертый упругий кабель 51 сцеплен с четвертым шкивом 50, прикрепленным к корпусу 9. Например, четвертый шкив 50 расположен в верхнем окончании перемещения каретки 6. Другие положения также могут быть предусмотрены без ущерба для преимуществ, которые обеспечивает вторая система компенсации.
Второе устройство компенсации обеспечивает те же преимущества, что и первое устройство компенсации. Второе устройство компенсации также имеет преимущество, заключающееся в возможности использования третьего и четвертого кабелей 41, 42 различной жесткости, чтобы улучшить управление возвратными силами. Это возможно благодаря тому, что третий и четвертый кабели 41, 42 вызывают возвратную силу в противоположных направлениях.
Устройство компенсации, используемое линейным приводом согласно изобретению, может быть выполнено согласно требуемым размерам и определено следующим образом:
- определение статических сил, которые необходимо компенсировать согласно смещению каретки 6, чтобы определить оптимальную компенсацию для линейного привода 2;
- определение сочетания упругих кабелей, которые обеспечивают воспроизведение статических сил, определенных ранее.
Преимущественно компенсация статических сил пассивным устройством компенсации, как описано в изобретении, позволяет уменьшить размер цепи привода двигателя привода согласно изобретению.
Генерирование силы, способной компенсировать статическую силу, прилагаемую к приводу согласно изобретению, также позволяет уменьшить максимальное потребление энергии приводом согласно изобретению.
Преимущественно привод согласно изобретению позволяет генерировать переменную силу, потому что статическая сила, которую необходимо компенсировать, меняется согласно динамической конфигурации привода согласно изобретению.
В приводе согласно изобретению сила компенсации может преимущественно быть изменена на противоположную, что делает устройство компенсации эффективным для всех рабочих конфигураций привода.
Преимущественно сама система компенсации не потребляет энергии.
Привод согласно изобретению также предлагает улучшенную безопасность относительно приводов, содержащих устройства компенсации, находящиеся под давлением. Это возможно благодаря тому, что привод согласно изобретению преимущественно позволяет избегать возврата привода в положение его устойчивого равновесия на полной скорости.
Преимущественно привод согласно изобретению позволяет исключить неэффективное перемещение.
Преимущественно каждый упругий кабель может быть выполнен в форме одного или более упругих кабелей или амортизирующих шнуров, чтобы была возможность приспособить компенсацию очень точно относительно сил в игре за то, чтобы сделать подвижной платформу системы моделирования.
Радиочастотная схема, установленная на борту спутника, содержащая систему теплового контроля при помощи сигнала тревоги, генерируемого при отражении мощности
Способ управления ресурсами в телекоммуникационной сети или в информационной системе
Компaктное термоэластичное воздействующее устройство для волновода, волновод с фазовой стабильностью и мультиплексирующее устройство, содержащее такой привод
Оптико-электронная система, имеющая сверхполусферический обзор
Антенная конструкция с подвижным пучком
Способ и устройство для защиты летательного аппарата
Система управления мощностью для двойного усилителя на лампах бегущей волны
Охлаждение электронного устройства
Электрическое и механическое устройство для электронного модуля в каркасе
Система авионики с тремя экранами отображения для летательного аппарата
Устройство доступа к данным на борту летательного аппарата
Радиочастотная схема, установленная на борту спутника, содержащая систему теплового контроля при помощи сигнала тревоги, генерируемого при отражении мощности
Способ управления ресурсами в телекоммуникационной сети или в информационной системе
Компaктное термоэластичное воздействующее устройство для волновода, волновод с фазовой стабильностью и мультиплексирующее устройство, содержащее такой привод
Оптико-электронная система, имеющая сверхполусферический обзор
Антенная конструкция с подвижным пучком
Способ и устройство для защиты летательного аппарата
Система управления мощностью для двойного усилителя на лампах бегущей волны
Охлаждение электронного устройства
Электрическое и механическое устройство для электронного модуля в каркасе

