Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НИЖНЕЙ ТОЧКИ АЙСБЕРГА
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для обнаружения айсбергов и оценки их характеристик с использованием гидроакустических средств.
Как правило, это необходимо для защиты морских сооружений (в том числе нефтяных и газовых буровых платформ) от ледяных образований, в первую очередь айсбергов.
Известен способ обследования нижней поверхности ледового покрова с помощью ГАС бокового и кругового (секторного) обзора, которые дают информацию о форме, размерах и распределении акустических неоднородностей нижней поверхности льда в пределах обследуемой ими площади, в виде двумерного яркостного изображения поверхности, формируемого на устройствах отображения. Интерпретация изображений обследуемых участков нижней поверхности льда базируется на различии коэффициентов обратного рассеяния звуковых волн, отраженных поверхностью разводья и окружающим его льдом. Недостатком такого способа является малая зона обзора, которая зависит от отстояния антенн гидролокатора от нижней поверхности льда (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. СПб.: Наука, 2004. Стр. 131-140). Эффективная полоса зоны обзора ГБО и ГКО при обследовании ровных, не подвергавшихся торошению льдов составляет 6-7 значений отстояния антенн гидролокатора от нижней поверхности льда. При обследовании паковых льдов значение этой основной характеристики ГАС снижается до 3,0…3,5 значений отстояния вследствие проявления эффекта затенения поверхности элементами рельефа на скользящих углах падения акустического луча. Так, например, при отстоянии антенны ГБО от нижней кромки льда, равном 100 м, эффективная полоса обзора пакового льда не превысит 300…350 м.
Известен способ определения осадки айсберга по патенту РФ №2541435. Способ, реализованный в ГАС бокового и кругового обзора, по количеству общих признаков является наиболее близким аналогом предлагаемого способа. Этот способ содержит излучение зондирующего сигнала в горизонтальной плоскости и прием эхосигнала статическим веером характеристик направленности в вертикальной плоскости, фильтрацию сигнала, детектирование, выбор порога, измерение амплитуд отсчетов, превысивших порог, и их времен и представление информации об осадке айсберга на индикатор.
Недостатком этого способа является невозможность работы при наличии волнения моря, которая исключает получения поверхностной реверберации и наличия тени.
Задачей предлагаемого способа является автоматическое определение размеров айсберга и его глубины погружения в условиях наличия волнения моря и повышение дальности обнаружения айсбергов.
Технический результат изобретения заключается в обеспечении автоматического определения глубины погружения подводной части айсберга в любых гидролого-акустических условиях работы.
Для выполнения заявленного технического результата в известный способ, содержащий излучение зондирующего сигнала на глубине Н, прием эхосигнала на глубине H статическим веером характеристик направленности в вертикальной плоскости, каждая из характеристик которых имеет ширину раствора по вертикали α<2°, фильтрацию, детектирование, измерение уровня изотропной помехи, определение порога, измерение времени TI превышения эхосигналом выбранного порога в каждом пространственном канале по вертикали, включены новые признаки, а именно: отбирают каналы, в которых произошло последовательное обнаружение эхосигналов в одно и то же время по правилу Ni € Т=TI+кΔti, где TI - время обнаружения эхосигнала в i пространственном вертикальном канале, Δti - длительность измеряемого сигнала на момент TI в Ni пространственном канале, к - коэффициент определяемый по результатам измерения акустических параметров айсберга в районе измерения, выбирают крайний нижний пространственный канал из непрерывной последовательности отобранных пространственных каналов, в которых произошло обнаружение эхосигналов, определяют максимальное время обнаружения Tмак в этом пространственном канале, определяют угол наклона βмак, соответствующий этому пространственному каналу, измеряют разрез скорости звука по глубине в месте установки приемной антенны, рассчитывают структуру звукового поля для измеренного времени распространения Tмак, угла наклона βмак и глубины положения приемной антенны Н, выбирают рассчитанную траекторию луча, время распространения которого равно измеренному времени Tмак, определяют глубину НЛ, которой достиг рассчитанный луч за время Tмак, и принимают решение о принадлежности полученной оценки глубины На максимальной глубине погружения нижней кромки айсберга.
Сущность предлагаемого способа основана на локации пространства активной гидроакустической системой (гидролокатором), включающей в себя излучающую антенну и приемную антенну, имеющую статический веер узких характеристик направленности в вертикальной плоскости. При гидролокационном методе определения параметров айсберга основная задача заключается в определении предельной глубины погружения айсберга. Как правило, айсберг представляет собой ограниченный по пространству и высоте объект, свободно перемещающийся в пространстве. Подводная часть айсберга существенно больше надводной части и может достигать нескольких сотен метров. Излучение зондирующего сигнала и прием отраженного сигнала осуществляется антеннами, расположенными на одной глубине. Прием зондирующего сигнала, отраженного айсбергом, с целью получения информации, необходимой для оценки его вертикального размера, производится с использованием статического вертикального веера направленности. Поскольку айсберг представляет собой единый монолитный объект, размеры которого существенно больше разрешающей способности используемого зондирующего сигнала и размеров пространственного разрешения используемой приемной антенны, то эхосигнал от айсберга будет обнаружен в нескольких пространственных характеристиках направленности. А поскольку это единый ледовый монолит, то эхосигнал будет находиться в нескольких последовательных вертикальных характеристиках направленности одновременно и затягивание эхосигнала определяется акустическими свойствами ледового монолита айсберга. Эти акустические свойства, различные для разных районов движения айсбергов, и смещают формирование эхосигнала. Они могут быть определены при предварительных испытаниях и учитываются с использованием коэффициента «к». Характеристики направленности расположены веером под разными углами, и эхосигналы от айсберга будут приходить с некоторым разбросом по моментам прихода относительно первого отраженного эхосигнала, обнаруженного в некоторой характеристике направленности. Кроме того, конфигурация айсберга является неровной в вертикальной плоскости, поэтому времена прихода эхосигналов в каждом пространственном канале будут отличаться друг от друга в пределах некоторой длительности, определяемой разрешающей способностью по времени и по углу. Возникает необходимость из всей совокупности принятых сигналов выбрать только тот эхосигнал, который принадлежит нижней характеристики направленности. При этом эта характеристика направленности должна принадлежать общей вертикальной совокупности непрерывных сигналов, обнаруженных последовательно за время между первыми принятым сигналов и последующими принятыми сигналами. Из этой совокупности эхосигналов выбирается эхосигнал, принятый нижней характеристикой направленности, определяется максимальная временная задержка эхосигнала в этой характеристике направленности Tмак и угол βмак, под которым пришел эхосигнал. Для найденного вертикального угла βмак в пределах ширины характеристики направленности можно построить траектории соответствующих акустических лучей, используя текущее значение временного распределения скорости звука по глубине (ВРСЗ) в районе расположения приемной антенны и значение глубины погружения приемной антенны (В.А. Комляков. Корабельные средства измерения скорости звука и моделирование акустических полей в океане. СПб.: Наука, 2003). Нижняя кромка айсберга должна находиться на этой расчетной кривой. Если время распространения до нижней кромки айсберга измерено и равно Tмак, то точка пересечения построенного луча со временем распространения Tмак и даст нам искомую оценку глубины нижней кромки айсберга На.
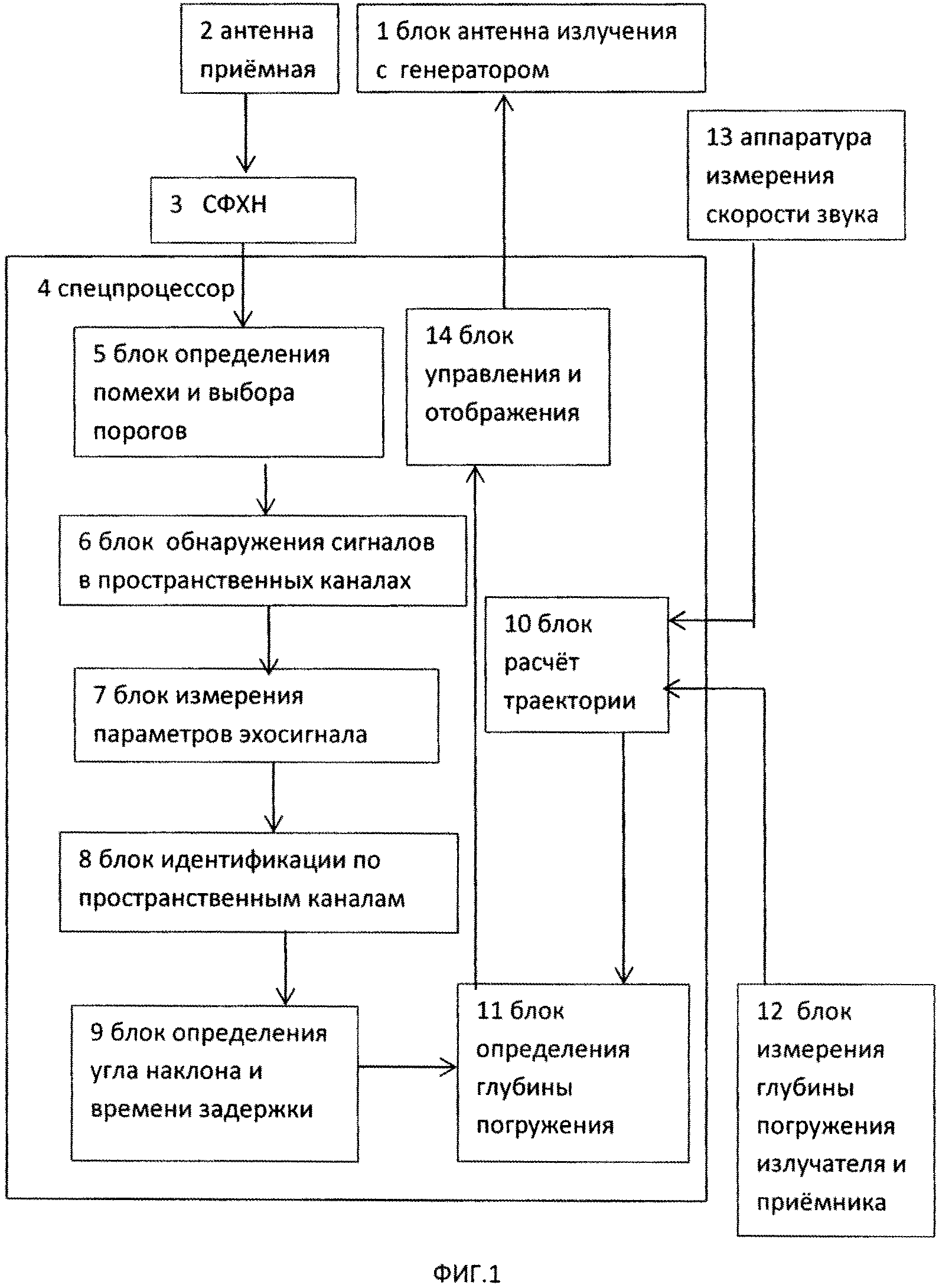
Блок-схема устройства, реализующего предложенный способ, представлена на фиг. 1. Приемная антенна 2 соединена со входом системы 3 формирования характеристик направленности (СФХН). Устройство (фиг. 1) также содержит спецпроцессор 4, содержащий последовательно соединенные блок 5 определения помехи и выбора порога, блок 6 обнаружения эхосигнала в пространственных каналах, блок 7 измерения параметров эхосигнала, блок 8 идентификации по пространственным каналам, блок 9 определения угла наклона и времени задержки, блок 11 определения глубины погружения и блок 14 управления и отображения, выход которого соединен со входом блока 1 антенны излучения с генератором. Выход блока СФХН 3 соединен со входом блока 5. Блок 12 измерения глубины погружения излучателя и приемника через первый вход блока 10 расчета траектории распространения лучей соединен со вторым входом блока 11 определения глубины погружения айсберга, аппаратура 13 измерения скорости звука соединена со вторым входом блока 10 расчета траектории распространения лучей. Блоки 5, 6, 7, 8, 9, 10, 11, 14 выполнены в виде спецпроцессора 4. Спецпроцессоры являются известными устройствами, которые предназначены для осуществления конкретных алгоритмов обработки с использованием аппаратных решений и жесткой логике вычислений в реальном масштабе времени (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. СПб.: Наука, 2004. Стр. 281-295).
Реализация способа с помощью устройства (фиг. 1) осуществляется следующим образом. С выхода блока 14 управления и отображения формируется зондирующий сигнал, поступает на блок 1 антенны излучения с генератором и излучается в нужном направлении. Эхосигнал принимается приемной антенной 2, которая совместно с системой 3 формирования характеристик направленности СФХН образуют вертикальный статический веер приемных характеристик, ширина которых не превышает 2°. Приемная антенна с СФХН являются известными устройствами, которые используются в современной гидроакустической аппаратуре (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. СПб.: Наука, 2004. Стр. 95-99, стр. 237-255). С выхода блока 3 по всем пространственным каналам сигнал поступает на блок 5 измерения помехи и выбор порога, где по первичным входным реализациям оценивается помеха и производится выбор порога, который передается на вход блока 6 обнаружения эхосигналов, совместно с временными реализациями от всех пространственных каналов в реальном масштабе времени из блока 3 СФХН. Каждая реализация в блоке 6 оценивается и сравнивается с порогом. Эхосигналы, которые превысили порог, передаются в блок 7, где оцениваются их основные параметры, такие как время задержки эхосигнала относительно момента излучения, временная протяженность, номер характеристики направленности, связанный с углом прихода сигнала. Эти измеренные параметры передаются в блок 8 идентификации по пространственным каналам, где производится выбор пространственных вертикальных каналов Ni. Зная, что размеры айсберга ограничены, можно предположить, что общее число пространственных вертикальных каналов, в которых последовательно, непрерывно и одновременно наблюдается эхосигнал, не превышает 4-х. Из этой совокупности пространственных вертикальных каналов выбирается только один нижний канал, определяется временная задержка эхосигнала кΔti и βмак - угол наклона характеристики направленности. Выбранная оценка времени задержки и угла наклоне передается в блок 11 определения глубины погружения айсберга, куда поступают данные из блока 10 расчета траектории распространения лучей. Расчет траектории распространения лучей производится на основе измерения зависимости скорости звука от глубины, которая определяется специальной аппаратурой в блоке 13 и оценками глубины погружения излучателя и приемника из блока 12. Гидроакустические измерители скорости звука являются известными устройствами, которые серийно выпускаются и устанавливаются совместно с гидроакустической аппаратурой (В.А. Комляков. Корабельные средства измерения скорости звука и моделирование акустических полей в океане. СПб.: Наука, 2003. Стр. 169-227). Расчет траектории распространения лучей является известной операцией, которая используется во всех гидроакустических комплексах (В.Н. Матвиенко, Ю.Ф. Тарасюк. Дальность действия гидроакустических средств. Л.: Судостроение, 1981). В блоке 11 производится выбор траектории распространения, которая соответствует измеренному времени задержки Тмак и углу βмак наклона, на основании чего производится определение глубины нижней точки айсберга На при сравнении измеренных параметров с результатами расчета гидроакустического поля.
Таким образом, используя результаты измерения и результаты расчета акустического поля, может быть автоматически определена глубина погружения нижней точки айсберга в условиях волнения моря, которое исключает определения зоны тени.
Способ определения глубины погружения нижней точки айсберга, содержащий излучение зондирующего сигнала на глубине Н, прием эхосигнала на глубине H статическим веером характеристик направленности в вертикальной плоскости, каждая из характеристик которых имеет ширину раствора по вертикали α<2°, фильтрацию, детектирование, измерение уровня изотропной помехи, определение порога, измерение времени T превышения эхосигналом выбранного порога в каждом пространственном канале по вертикали, отличающийся тем, что отбирают каналы, в которых произошло последовательное обнаружение эхосигналов в одно и то же время по правилу Ν∈ Τ=Τ+кΔτ, где T - время обнаружения эхосигнала в i пространственном вертикальном канале, Δt - длительность измеряемого сигнала на момент T в N пространственном канале, к - коэффициент, определяемый по результатам измерения акустических параметров айсберга в районе измерения, выбирают крайний нижний пространственный канал из непрерывной последовательности отобранных пространственных каналов, в которых произошло обнаружение эхосигналов, определяют максимальное время обнаружения T в этом пространственном канале, определяют угол наклона β, соответствующий этому пространственному каналу, измеряют разрез скорости звука по глубине в месте установки приемной антенны, рассчитывают структуру звукового поля для измеренного времени распространения T, угла наклона β и глубины положения приемной антенны Н, выбирают рассчитанную траекторию луча, время распространения которого равно измеренному времени T, определяют глубину H, которой достиг рассчитанный луч за время T, и принимают решение о принадлежности полученной оценки глубины H максимальной глубине погружения нижней кромки айсберга.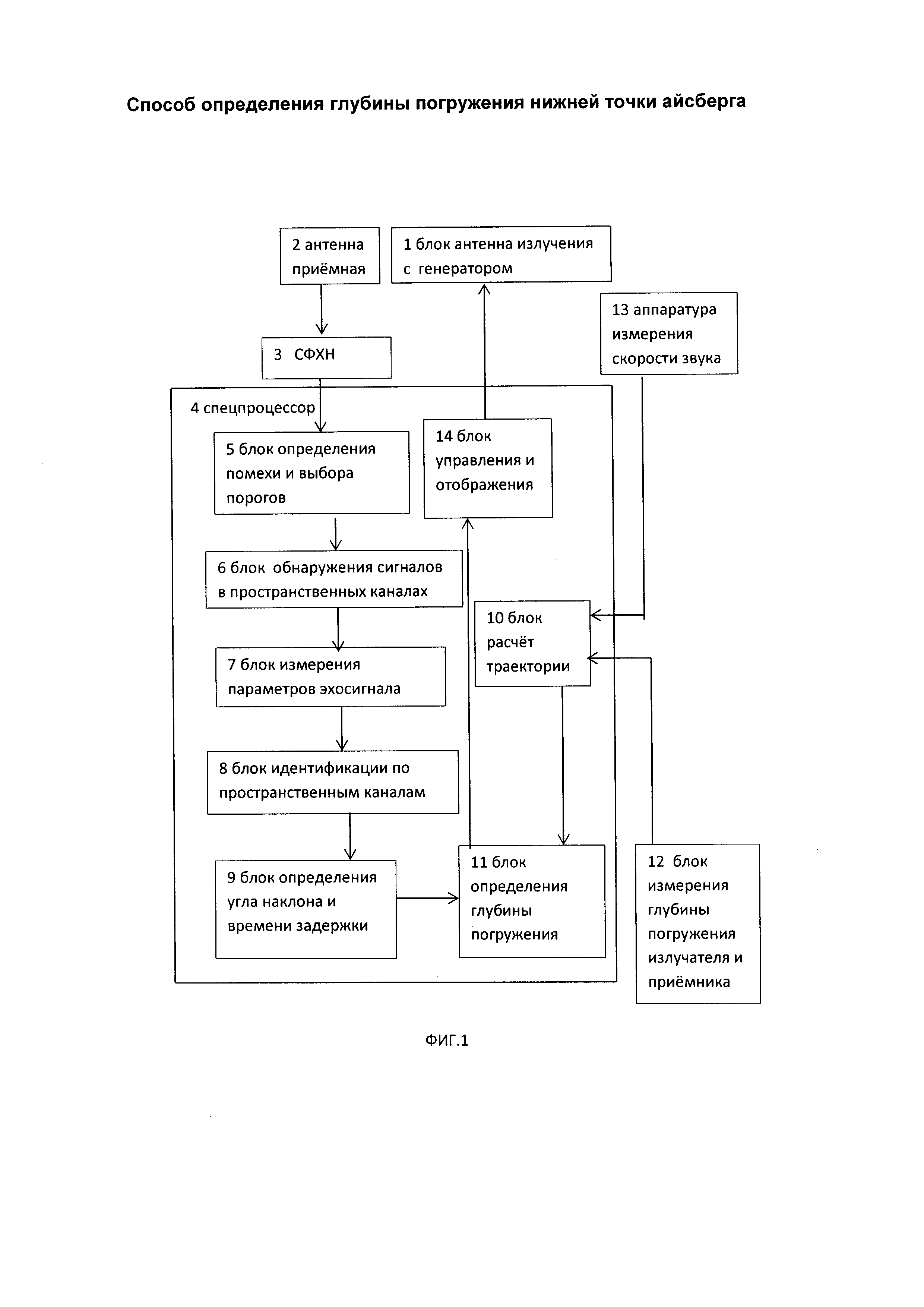
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ пассивного определения координат источников излучения
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ пассивного определения координат источников излучения
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором

