Результат интеллектуальной деятельности: РУЧНОЙ ЛАЗЕРНЫЙ ДАЛЬНОМЕР
Вид РИД
Изобретение
Настоящее изобретение относится к ручному лазерному дальномеру, охарактеризованному в ограничительной части пункта 1 формулы изобретения.
Из публикации US 2003/0098973 A1 известен ручной лазерный дальномер, содержащий по меньшей мере один лазерный узел, предусмотренный для определения первого расстояния в первом относительном направлении посредством лазерного луча и для выполняемого посредством лазерного луча через короткий промежуток времени определения по меньшей мере одного второго расстояния по меньшей мере в одном втором относительном направлении, отличающемся от первого относительного направления, причем лазерный узел содержит средство для отклонения лазерного луча в различных относительных направлениях.
В настоящем изобретении предлагается ручной лазерный дальномер, содержащий по меньшей мере один лазерный узел, предусмотренный для определения первого расстояния в первом относительном направлении посредством лазерного луча и для выполняемого посредством лазерного луча через короткий промежуток времени определения по меньшей мере одного второго расстояния по меньшей мере в одном втором относительном направлении, отличающемся от первого относительного направления, причем лазерный узел содержит средство для отклонения лазерного луча в различных относительных направлениях.
Лазерный узел предлагается снабдить устройством ввода, позволяющим устанавливать угол по меньшей мере между первым и вторым относительными направлениями, что обеспечивает технические результаты, заключающиеся в повышении удобства пользования дальномером и в повышении его эксплуатационных характеристик, в частности универсальности, что касается выполнения косвенных (непрямых) измерений расстояния, так как позволяет пользователю просто и быстро согласовывать относительные направления, используемые при измерении расстояний, с обстановкой, в которой пользователю требуется провести косвенное измерение расстояния в направлении, проходящем поперек лазерного луча.
Под устройством ввода следует понимать, в частности, устройство, содержащее, в частности, тактильный элемент, предназначенный для задания, в результате воздействия пользователя, параметра для механического и/или, в предпочтительном варианте, электрического управления вычислительным узлом и/или лазерным узлом. Возможность ввода параметра, устанавливающего угол между первым и вторым относительными направлениями (например, с помощью вращающейся ручки или сенсорного дисплея), позволяет пользователю просто и быстро согласовывать относительные направления, используемые при измерении расстояний, с обстановкой, в которой пользователю требуется провести поперечное (косвенное) измерение расстояний.
Под "ручным" лазерным дальномером следует понимать, в частности, то, что в процессе измерения пользователь может вести лазерный дальномер рукой, предпочтительно держа лазерный дальномер рукой. В предпочтительном варианте лазерный дальномер имеет вес меньше 2 кг, в особо предпочтительном варианте - меньше 1 кг. Под лазерным узлом следует понимать, в частности, устройство, предусмотренное для испускания лазерного луча, более 50% мощности которого сосредоточено в угле раскрытия, составляющем менее 2°, в предпочтительном варианте - менее 0,5 градуса, в особо предпочтительном варианте - менее 0,1 градуса. В предпочтительном варианте лазерный узел содержит лазер, луч которого колеблется, в частности непрерывно, между обоими относительными направлениями, в частности с частотой, составляющей более 2 Гц, в предпочтительном варианте - более 10 Гц, в особо предпочтительном варианте - более 20 Гц. В качестве альтернативы или дополнения лазерный узел может содержать по меньшей мере два лазера и/или по меньшей мере два датчика, предусмотренных для определения расстояния в различных относительных направлениях. Слово "предусмотренный" следует понимать как специально запрограммированный, выполненный, рассчитанный и/или оснащенный для выполнения определенной функции. Под относительным направлением следует понимать, в частности, направление, рассматриваемое относительно корпуса лазерного дальномера. Таким образом, лазерный дальномер определяет расстояние по меньшей мере до двух разных точек измерения в течение короткого промежутка времени. В предпочтительном варианте лазерный узел предусмотрен для определения, в частности, в течение короткого промежутка времени расстояний по меньшей мере в трех, в предпочтительном варианте по меньшей мере в четырех относительных направлениях. В предпочтительном варианте лазерный узел выполнен с возможностью измерения - в определенной плоскости, в некотором угловом диапазоне и, в частности, в течение короткого промежутка времени, - определенного, в частности регулируемого пользователем, числа расстояний в различных относительных направлениях. В предпочтительном варианте лазерный узел выполнен с возможностью юстировки относительных направлений, в частности относительно друг друга и/или, в предпочтительном варианте, относительно корпуса лазерного дальномера. В альтернативном или дополнительном варианте в лазерном узле предусмотрена возможность регистрации, установки и/или, в предпочтительном варианте, регулирования угла между по меньшей мере двумя относительными направлениями. Под расстоянием в контексте изобретения следует понимать отрезок пути между лазерным узлом и обмеряемой поверхностью объекта измерения, которая в процессе измерения по меньшей мере частично отражает лазерный луч в направлении лазерного узла. В предпочтительном варианте лазерный узел содержит датчик, предусмотренный для регистрации части светового излучения, отраженного обмеряемой поверхностью. В предпочтительном варианте датчик содержит несколько фотодетекторов, осуществляющих с помощью оптической системы прием отраженного светового излучения в нескольких отличающихся друг от друга угловых диапазонах. В предпочтительном варианте фотодетекторы расположены в плоскости как двухмерные элементы. В альтернативном варианте прием отраженного светового излучения со всех относительных направлений может осуществлять единственный фотодетектор датчика и/или этот единственный фотодетектор датчика может принимать отраженное световое излучение посредством полупрозрачного и/или односторонне прозрачного зеркала, которое по меньшей мере частично располагается в неотраженном лазерном луче. В предпочтительном варианте лазерный узел определяет, в частности, время пробега импульса лазерного излучения между моментами его испускания и приема лазерным узлом. В альтернативном или дополнительном варианте лазерный узел может определять расстояние по другому параметру, если это будет признано целесообразным специалистом в данной области, например путем триангуляции и/или по фазовому положению, в частности применительно к сигналу, модулирующему лазерное излучение. Под коротким промежутком времени в контексте изобретения следует понимать, в частности, то, что лазерный узел предусмотрен для определения по меньшей мере двух расстояний в течение 500 мс, в предпочтительном варианте - 100 мс, в особо предпочтительном варианте - 50 мс. В частности, в промежутке между определением двух расстояний лазерный узел является неподвижным, в частности за исключением средства отклонения лазерного луча. Под термином "различные" в контексте изобретения следует понимать, в частности, то, что по меньшей мере в одном рабочем режиме между первым относительным направлением и вторым относительным направлением имеется острый угол, составляющий более 5°, в предпочтительном варианте - более 30°. Предлагаемое в настоящем изобретении выполнение лазерного дальномера обеспечивает удобное измерение расстояний наряду с особо низкими конструктивными затратами. В частности, пользователь может измерить расстояние между двумя точками, достижимыми лишь посредством лазерного луча, не размещая лазерный дальномер в одной из этих точек. При этом измерение такого расстояния можно осуществить особо благоприятным образом - путем одного нажатия кнопки и/или в течение короткого промежутка времени, составляющего, в частности, менее одной секунды. В предпочтительном варианте для измерения расстояния пользователь может находиться в одной из точек, разделяемых этим расстоянием. Кроме измерения участков, находящихся на удалении от лазерного дальномера, последний обеспечивает возможность определения расстояния между лазерным узлом и точкой измерения и вывода соответствующей информации.
Средство отклонения лазерного луча в различных относительных направлениях обеспечивает конструктивно простую возможность определения расстояния в нескольких местах посредством всего одного лазера. Под средством отклонения лазерного луча следует понимать средство, применение которого специалист в данной области считает целесообразным, но в предпочтительном варианте он означает пространственный модулятор света (ПМС), преломляющую оптическую систему, механизм для поворота лазера в лазерном узле, датчики лазерного узла и/или оптическую систему лазерного узла, микрозеркальную матрицу, включающую несколько микрозеркал, но в особо предпочтительном варианте - всего одно микрозеркало. Площадь поверхности одного микрозеркала составляет, в частности, менее 4 мм2, в предпочтительном варианте - менее 1 мм2, в особо предпочтительном варианте - менее 0,1 мм2. В предпочтительном варианте зеркало выполнено с возможностью его поворота по меньшей мере в одном направлении, в предпочтительном варианте - в двух направлениях, посредством электрического сигнала, в частности с помощью электростатического привода. В предпочтительном варианте средство отклонения лазерного луча непрерывно вызывает поворот последнего в пределах, в частности, постоянного углового диапазона. В предпочтительном варианте можно осуществить фокусировку лазера на отдельных точках измерения путем его тактирования и/или применения диафрагмы либо использовать еще один лазер, в частности с другим цветом луча, для выполнения целеуказания пользователем. В последнем случае луч лазера, используемого для определения расстояния, может быть невидимым.
Кроме того, предлагается оснастить лазерный дальномер вычислительным узлом, предусмотренным для установки угла по меньшей мере между первым и вторым относительными направлениями, благодаря чему обеспечивается возможность особо точной, быстрой и легко выполняемой юстировки лазерного луча или лазерных лучей по относительным направлениям. Под вычислительным узлом следует понимать, в частности, блок, содержащий вход для информации, средства ее обработки и выход для информации. В предпочтительном варианте вычислительный узел содержит по меньшей мере процессор, интерфейсы ввода, интерфейсы вывода и/или, в предпочтительном варианте, операционные системы или программы и стандартные программы регулирования, управления и/или вычисления, содержащиеся в запоминающем устройстве вычислительного узла. Под установкой следует понимать, в частности, то, что вычислительный узел выдает по меньшей мере один параметр, предназначенный для управления средством отклонения лазерного луча и/или его регулирования с целью юстировки относительного направления.
Далее, предлагается выполнить вычислительный узел с возможностью регулирования средства отклонения лазерного луча в рабочем режиме, при котором точка измерения, соответствующая первому относительному направлению, и точка измерения, соответствующая второму относительному направлению, расположены на заданном расстоянии друг от друга, что обеспечивает пользователю особое удобство в смысле отображения и определения размеров участков какой-либо поверхности. Например, пользователь может очень быстро проверить, поместится ли шкаф данной ширины в имеющейся нише. Под рабочим режимом следует понимать рабочее состояние по меньшей мере вычислительного узла, на которое может оказывать влияние пользователь и в котором вычислительный узел выполняет выбираемые пользователем стандартные программы регулирования, управления и/или вычисления. В предпочтительном варианте предусмотрено, что вычислительный узел выполняет различные программы. Под регулированием в контексте изобретения следует понимать, в частности, то, что вычислительный узел определяет расстояние между обеими точками измерения, сравнивает полученное расстояние, в частности, с расстоянием, заданным пользователем, после чего изменяет угол между относительными направлениями таким образом, что точки измерения располагаются на заданном расстоянии друг от друга. Под точкой измерения следует понимать, в частности, область обмеряемой поверхности, от которой отражается лазерный луч и размеры которой определяет вычислительный узел в процессе работы.
Кроме того, предлагается, чтобы лазерный дальномер содержал вычислительный узел, выполненный с возможностью определения по меньшей мере одного контура объекта измерения, благодаря чему обеспечивается особо удобное, быстрое и точное определение расстояний в пределах этого контура и/или по меньшей мере одного параметра этого контура, например радиуса или фокуса эллипса. Под контуром объекта измерения следует понимать, в частности, изгиб, кромку, отверстие и/или иное, рассматриваемое специалистом в данной области как целесообразное, изменение структуры и/или ориентации обмеряемой поверхности вдоль по меньшей мере одного отрезка, проходящего по этой поверхности. В предпочтительном варианте вычислительный узел устанавливает, проводя измерения посредством лазерного узла, конфигурацию отрезка на обмеряемой поверхности и определяет контур этой поверхности с помощью программы вычисления.
Кроме того, предлагается, чтобы лазерный дальномер содержал вычислительный узел, выполненный с возможностью определения по меньшей мере одного расстояния от обмеряемой поверхности до точки измерения, благодаря чему обеспечивается чрезвычайно разностороннее применение данного устройства. Под расстоянием от поверхности до точки измерения следует понимать, в частности, минимальное расстояние между плоскостью, определяемой данной поверхностью, и данной точкой.
Далее, предлагается, чтобы лазерный дальномер содержал вычислительный узел, выполненный с возможностью определения угла пересечения по меньшей мере двух обмеряемых поверхностей, благодаря чему обеспечивается удобное измерение углов. Под углом пересечения в контексте изобретения следует понимать, в частности, обращенный к лазерному узлу угол между двумя плоскостями, определяемыми обмеряемыми поверхностями, лежащий в плоскости измерения, определяемой лазерным узлом и точками измерения.
В предпочтительном варианте осуществления изобретения предлагается выполнить лазерный узел с возможностью формирования по меньшей мере одной проекционной линии, что позволяет особо благоприятным образом показать измеренный отрезок. Под проекционной линией следует понимать, в частности, сплошную и/или точечную линию, отображаемую на обмеряемой поверхности посредством лазерного узла. В предпочтительном варианте лазерный узел формирует проекционную линию непрерывным образом, например посредством оптической системы. В особо предпочтительном варианте лазерный узел формирует проекционную линию таким образом, что по объекту измерения движется многократно воспроизводимая лазерная точка, воспринимаемая пользователем как линия. В предпочтительном варианте лазерный узел содержит один лазер с первой длиной волны для определения расстояния и/или формирования проекционной линии и по меньшей мере один второй лазер со второй длиной волны для указания точек измерения, обмеряемых контуров и/или других точек в зависимости от того, что считает целесообразным специалист в данной области.
Кроме того, предлагается выполнить лазерный узел с возможностью проецирования значения расстояния, в частности на объект измерения, благодаря чему обеспечивается весьма удобное отображение. В предпочтительном варианте лазер проецирует значение, определяющее по меньшей мере первое расстояние. В качестве альтернативы или дополнения лазерный узел содержит, в частности, проекционный лазер другого цвета и/или другое, в частности многоцветное, проекционное устройство, применение которого специалист в данной области считает целесообразным. В качестве альтернативы или дополнения лазерный дальномер содержит проектор, в частности DLP - (англ. Digital Light Processing - цифровая обработка света), LCD - (англ. Liquid Cristal Display - жидкокристаллический дисплей) или LCoS - (англ. Liquid Crystal on Silicon - жидкие кристаллы на кремнии) проектор, в предпочтительном варианте содержащий светодиод в качестве источника света.
Кроме того, предлагается оснастить лазерный дальномер блоком определения пространственного положения, предусмотренным для определения по меньшей мере одной ориентации по меньшей мере лазерного узла в пространстве, благодаря чему можно благоприятным образом компенсировать дрожание руки пользователя и получить дополнительную информацию для определения расстояния и/или юстировки. Под блоком определения пространственного положения следует понимать, в частности, устройство, предназначенное по меньшей мере для определения ориентации по меньшей мере лазерного узла по меньшей мере относительно направления силы тяжести. В предпочтительном варианте блок определения пространственного положения предусмотрен также для определения ускорения в каком-либо направлении в пространстве и/или вращения вокруг какой-либо оси, которая ориентирована параллельно направлению силы тяжести, например для измерения горизонтальных отрезков. Например, пользователь может иметь дело с вертикальным и/или горизонтальным расположением плоскости измерения лазерного узла.
Далее, предлагается выполнить вычислительный узел с возможностью вычисления еще одного расстояния на основании по меньшей мере ориентации, зарегистрированной блоком определения пространственного положения, и двух расстояний, измеренных в одном и том же относительном направлении, благодаря чему обеспечивается чрезвычайно разностороннее применение лазерного дальномера. В частности, можно конструктивно просто осуществить вычисление площади поверхности по расстояниям, определенным в двух относительных направлениях, и расстоянию, зарегистрированному блоком определения пространственного положения. При этом плоскость лазера в лазерном узле совершает поворот над поверхностью, в результате чего происходит ее обмер. Во время этого поворота вычислительный узел фиксирует, в предпочтительном варианте, граничные контуры поверхности и производит соответствующее ориентирование на относительные направления.
Краткое описание чертежей
Прочие преимущества изобретения представлены в приведенном ниже описании чертежей. На чертежах показаны два примера осуществления изобретения. Чертежи, описание и формула изобретения содержат многочисленные отличительные признаки в комбинации. Специалисты в данной области могут также целесообразным образом рассматривать эти отличительные признаки в отдельности и объединять их в другие требуемые комбинации.
На чертежах показано:
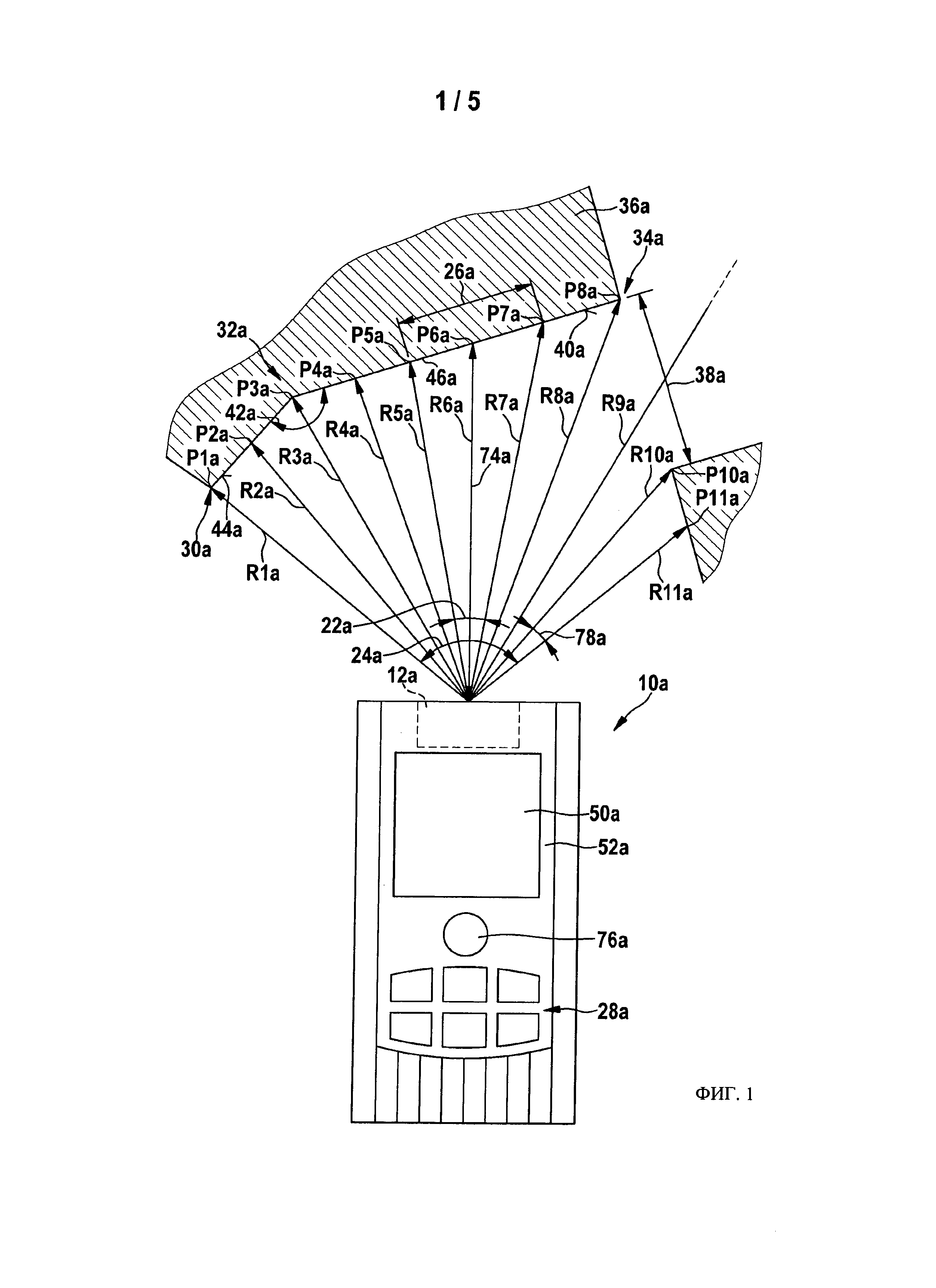
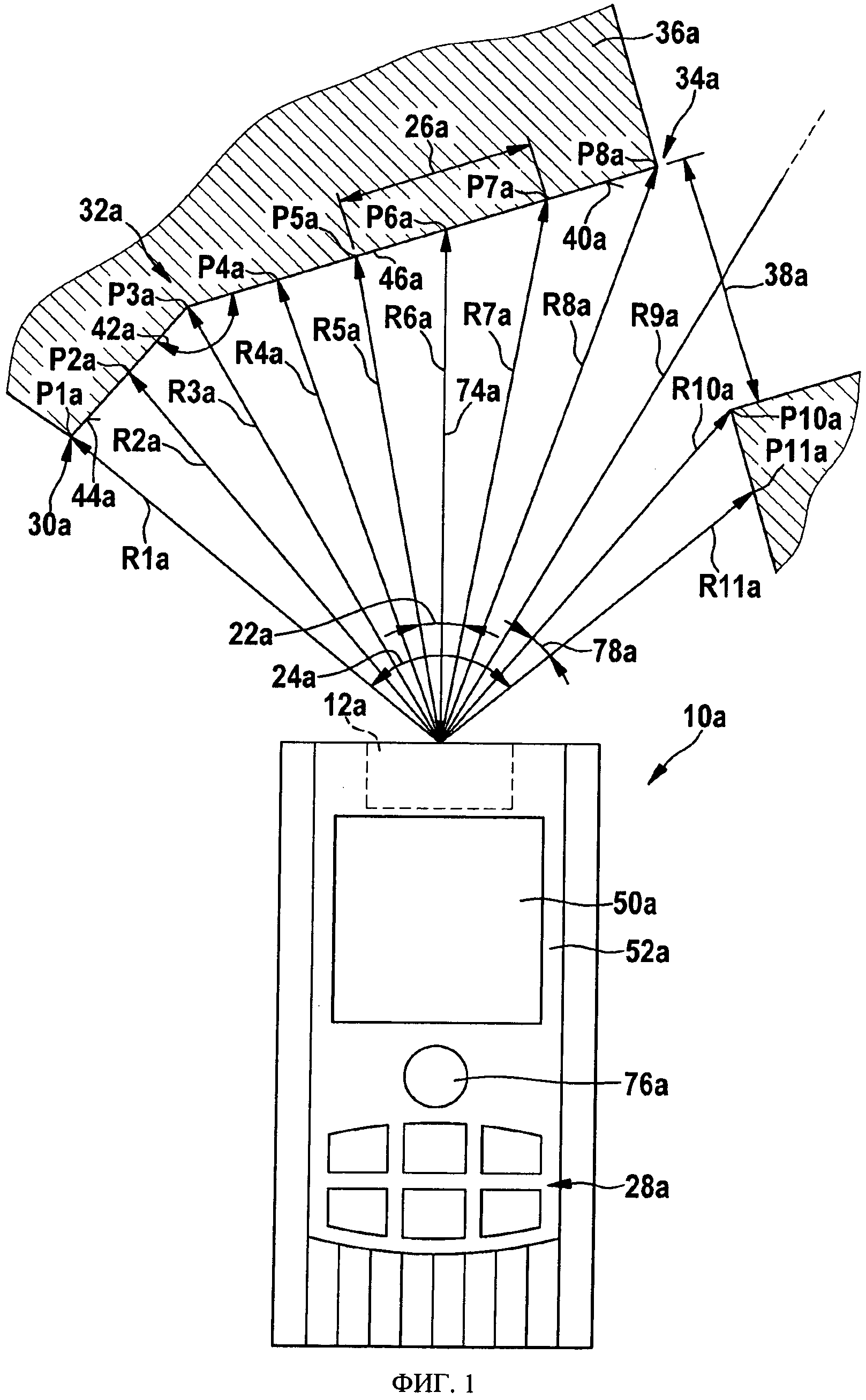
на фиг. 1 - предлагаемый в изобретении ручной дальномер и объект измерения,
на фиг. 2 - функциональная схема лазерного дальномера, показанного на фиг. 1,
на фиг. 3 - схематическое изображение, иллюстрирующее второй пример осуществления лазерного дальномера, показанного на фиг. 1,
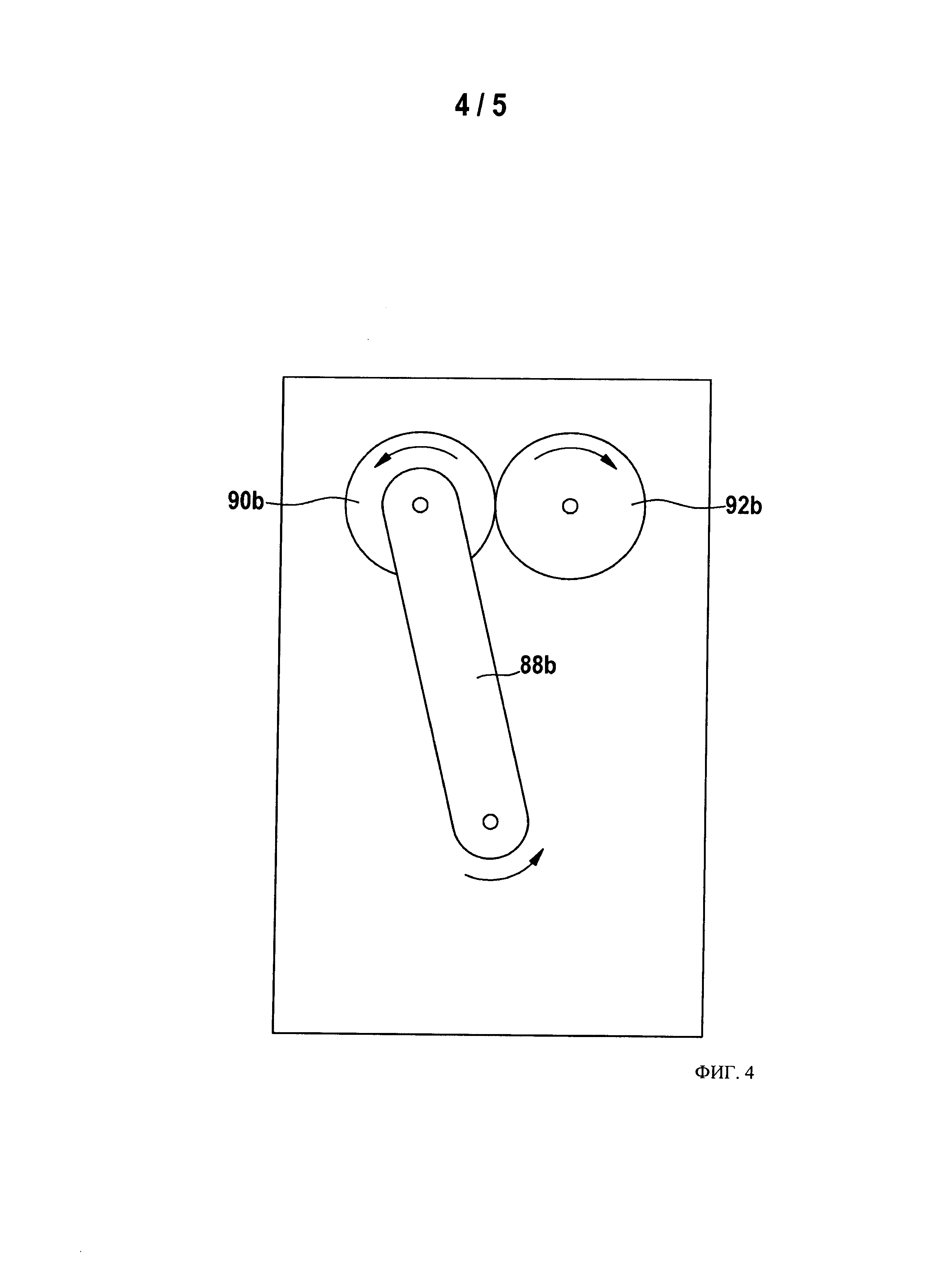
на фиг. 4 - схематическое изображение средства отклонения лазерного луча в лазерном дальномере, показанном на фиг. 3,
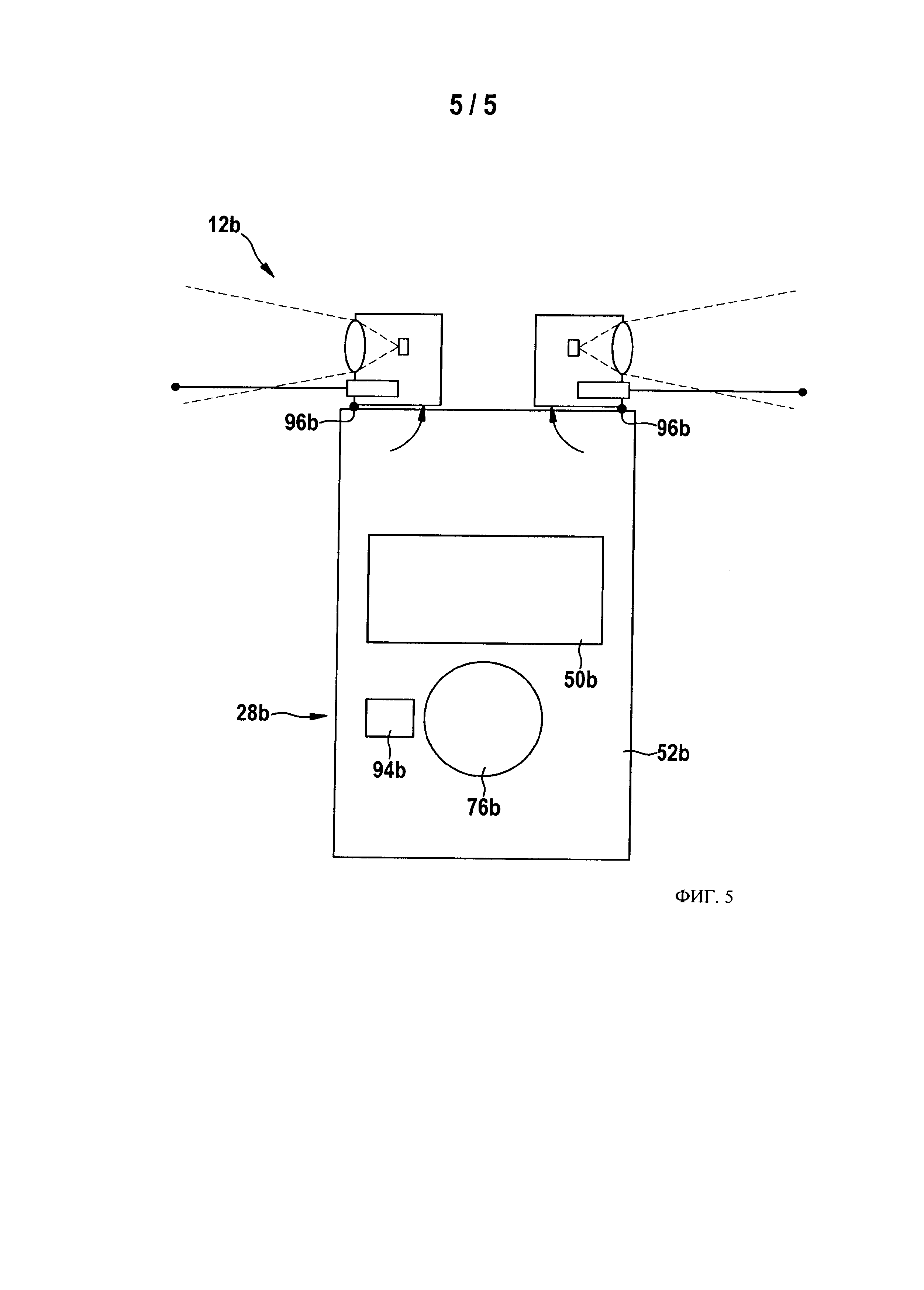
на фиг. 5 - лазерный дальномер, показанный на фиг. 3, в другом рабочем режиме.
Осуществление изобретения
На фиг. 1 показан ручной предлагаемый в изобретении лазерный дальномер 10а, содержащий лазерный узел 12а, устройство 28а ввода, дисплей 50а и корпус 52а. В режиме измерения лазерный узел 12а определяет - посредством лазерного луча 14а и в течение короткого промежутка времени - несколько расстояний в различных относительных направлениях R1a-R11a. Эти одиннадцать относительных направлений R1a-R11a показаны на фиг. 1 в качестве примера. С помощью устройства 28а ввода пользователь осуществляет управление лазерным дальномером 10а. На дисплее 50а отображаются результаты измерений. Устройство ввода содержит орган управления дисплеем, не показанный в деталях.
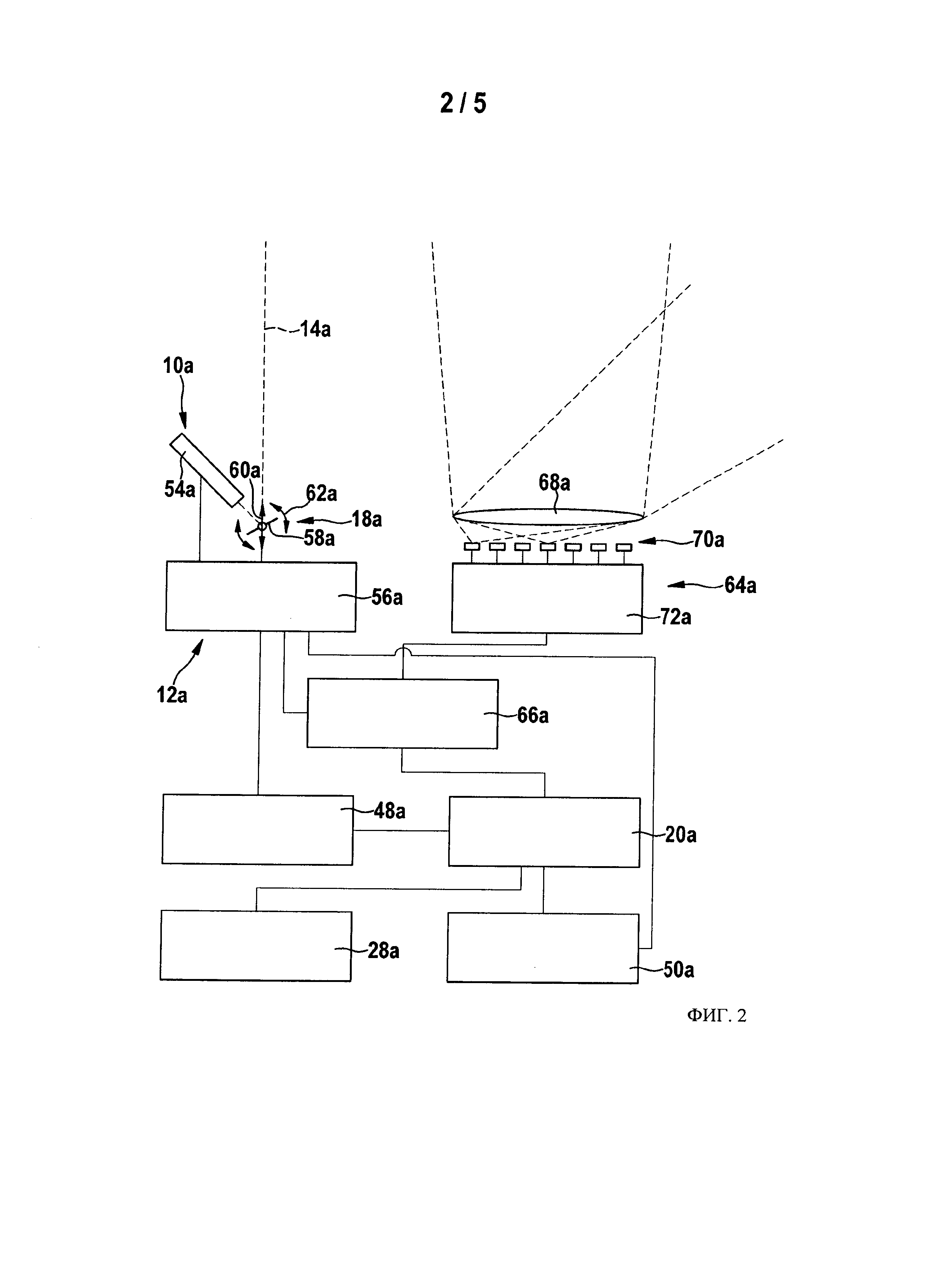
На фиг. 2 показано, что лазерный узел 12а содержит средство 18а отклонения лазерного луча, лазер 54а и блок 56а управления. В процессе работы блок 56а управления управляет мощностью лазера 54а и средством 18а отклонения лазерного луча. Средство 18а отклонения лазерного луча содержит зеркало, представляющее собой компонент микроэлектромеханической системы (МЭМС). Блок 56а управления выполнен с возможностью осуществления поворота микрозеркала 58а средства 18а вокруг взаимно перпендикулярных осей 60а, 62а. В альтернативном варианте блок 56а управления может осуществлять поворот микрозеркала 58а вокруг только одной оси и/или поворот вокруг одной оси двух зеркал, расположенных друг за другом по ходу лазерного луча и взаимно перпендикулярных друг другу. Поворачивая микрозеркало 58а в процессе измерения, лазерный узел 12а отклоняет лазерный луч 14а в различных относительных направлениях R1a-R11a, то есть в различных направлениях относительно корпуса 52а.
Лазерный узел 12а содержит датчик 64а и блок 66а синхронизации. Датчик 64а включает оптическую систему 68а, фотодетекторы 70а и блок 72а выборки. Оптическая система 68а направляет свет, отраженный от объекта 36а измерения, по существу на один из фотодетекторов 70а (в зависимости от относительных направлений R1a-R11a). В предпочтительном варианте оптическая система 68а содержит по меньшей мере одну микрозеркальную матрицу. Блок 72а выборки осуществляет первичную обработку сигналов фотодетекторов 70а, а именно усиливает эти сигналы и сериализирует содержащиеся в них данные. Блок 66а синхронизации управляет посылкой лазерного луча 14а (или осуществляет регулирование последнего) и приемом отраженного светового излучения посредством оптической системы 68а. Блок 66а синхронизации определяет параметр, зависящий от расстояний и вводимый вычислительным узлом 20а.
Лазерный дальномер 10а содержит вычислительный узел 20а и блок 48а определения пространственного положения. Вычислительный узел 20а управляет дисплеем 52а и блоком 66а синхронизации и считывает данные из устройства 28а ввода, а также устанавливает различные режимы измерения. Блок 48а определения пространственного положения содержит не показанный в деталях трехосевой датчик ускорения для регистрации силы тяжести и определения ускорений, а также гироскоп для регистрации вращательных движений вокруг всех осей. В целях компенсации дрожания руки пользователя блок 48а определения пространственного положения соединен непосредственно с блоком 56а управления.
В первом режиме измерения лазерный узел 12а посылает лазерный луч 14а вдоль среднего относительного направления R6. Вычислительный узел 20а определяет по времени пробега импульса лазерного луча 14а расстояние 74а между точкой Р6а измерения объекта 36а измерения и лазерным узлом 12а. Значение расстояния 74а вычислительный узел 20а отображает на дисплее 50а с возможностью считывания его пользователем. Кроме того, вычислительный узел 20а отображает значение расстояния 74а на объекте 36а измерения, при этом лазерный узел 12а проецирует данное значение на объект 36а. С этой целью блок 56 управления соединен с дисплеем 50а.
Во втором режиме измерения лазерный узел 12а посылает лазерный луч 14а поочередно в первом относительном направлении R5 и во втором относительном направлении R7. Устройство 28а ввода содержит вращающуюся ручку 76а. Манипулируя вращающейся ручкой 76а, пользователь может регулировать угол 22а между этими двумя относительными направлениями R5, R7. Лазерный узел 12а содержит не показанный в деталях датчик, регистрирующий в процессе работы угол между относительными направлениями R1a-R11a. Вычислительный узел 20а вычисляет расстояние 26а между точками Р5а, Р7а измерения. Для этого вычислительный узел 20а использует теорему косинусов.
В третьем режиме измерения пользователь задает с помощью устройства 28а ввода расстояние 26а между двумя точками Р5а, Р7а измерения. Вычислительный узел 20а регулирует угол 22а между двумя относительными направлениями R5a, R7a. Тем самым точки Р5а, Р7а устанавливаются на заданном расстоянии друг от друга по прямой.
В четвертом режиме измерения пользователь регулирует с помощью устройства 28а ввода угол 24а между двумя внешними относительными направлениями R1a, R11a. Вычислительный узел 20а посылает лазерный луч 14а в относительных направлениях R1a-R11a c возможностью регулирования числа этих направлений. В качестве альтернативы или дополнения обеспечивается возможность регулирования угла 78а между двумя соседними относительными направлениями R1a-R11a. Вычислительный узел 20а определяет расстояния между соседними точками Р1а-Р8а измерения и путем суммирования вычисляет длину измеряемого отрезка вдоль объекта 36а измерения. Если расстояние между двумя соседними точками измерения превышает некоторое пороговое значение и/или измерение в относительном направлении R9a невозможно, то вычислительный узел 20а выдает пользователю предупредительный сигнал (оптический, акустический и/или тактильный). Пользователь может выбрать, игнорировать ли ему это предупреждение или ограничить измеряемый отрезок ближайшей и/или находящейся ближе к середине точкой Р8а измерения. Кроме того, вычислительный узел 20а выполнен с возможностью оптимизации процесса вычисления расстояния посредством стандартной программы фильтрации, применение которой специалист в данной области считает целесообразным, например посредством подбора методом наименьших квадратов. Далее, вычислительный узел 20а вычисляет площади обмеряемых поверхностей, для чего перемножает значения длины двух взаимно перпендикулярных отрезков, измеренных последовательно и/или, в предпочтительном варианте, в течение короткого промежутка времени.
В другом варианте осуществления четвертого режима измерения вычислительный узел 20а содержит не представленную в деталях стандартную вычислительную программу, которая в процессе измерения определяет контуры 30а, 32а, 34а объекта 36а измерения. Например, вычислительная программа может включать алгоритм RANSAC (англ. Random Sample Consensus - оценка параметров на основе случайных выборок). Вычислительный узел 20а содержит не представленную в деталях стандартную программу регулирования, которая располагает точку Р1а, Р3а, Р8а измерения точно в середине определяемого контура 30а, 32а, 34а. Лазерный узел 12а содержит не показанный в деталях второй лазер, отличающийся цветом от первого лазера 54а. С помощью второго лазера вычислительная программа 20а маркирует полученные контуры и выбранные для измерения отрезки. С помощью первого лазера лазерный узел 12а формирует проекционную линию 46а, указывающую на положение измеряемого в данный момент отрезка. В качестве альтернативы или дополнения лазерный узел 20а производит, в течение короткого промежутка времени, измерение нескольких отрезков, разделенных определенными контурами 30а, 32а, 34а, и проецирует результаты измерений на объект измерения 36а рядом с этими отрезками.
В пятом режиме измерения вычислительный узел 20а определяет расстояние 38а от поверхности 40а в перпендикулярном направлении до точки Р10а, P11a измерения, находящейся на другой поверхности. Для этого вычислительный узел 20а определяет ориентацию поверхности 40а относительно плоскости измерения, например по двум точкам Р5а, Р7а и точке Р10а, Р22а на другой поверхности.
В шестом режиме измерения вычислительный узел 20а определяет ориентацию двух поверхностей 40а, 44 относительно плоскости измерения лазерного узла 12а. По этой ориентации вычислительный узел 20а вычисляет угол 42а пересечения этих двух поверхностей 40а, 44а.
В седьмом режиме измерения (не представленном в деталях) вычислительный узел 20а определяет движение лазерного узла 12а по данным, относящимся к ориентации и ускорению и полученным посредством блока 48а определения пространственного положения. Тем самым обеспечивается возможность определения размеров поверхности, в процессе чего пользователь движением руки изменяет ориентацию плоскости измерения лазерного узла 12а, поворачивая ее над объектом 36а измерения. При этом вычислительный узел 20а вычисляет расстояние (в направлении поворота) на объекте 36а измерения на основании ориентации, полученной посредством блока 48а определения пространственного положения, и двух расстояний, измеренных в одном и том же относительном направлении R1a-R411a. Вычислительный узел 20а автоматически следует по контурам 30а, 32а, ограничивающим поверхность.
В качестве альтернативы или дополнения применительно к седьмому режиму измерения вычислительный узел 20а может производить обмер поверхности путем отклонения лазерного луча 14а в двух взаимно перпендикулярных направлениях, вследствие чего точки измерения располагаются на поверхности как в двухмерном пространстве. Кроме того, блок 48а определения пространственного положения оказывает поддержку пользователю при горизонтальном и/или вертикальном ориентировании лазерного узла 12а, указывая ему на необходимую ориентацию оптическим, акустическим и/или тактильным образом. С этой целью блок 48а определения пространственного положения может быть, например, оснащен вибратором.
Еще в одном не представленном в деталях режиме измерения вычислительный узел 20а фиксирует какой-либо параметр контура. Для этого в вычислительном узле 20а предусмотрена стандартная вычислительная программа, идентифицирующая контур, например контур круглой колонны. Вычислительный узел 20а отображает на дисплее параметры контура, например радиус, диаметр, площадь основания, и/или значения, вычисленные из этих параметров, например объем.
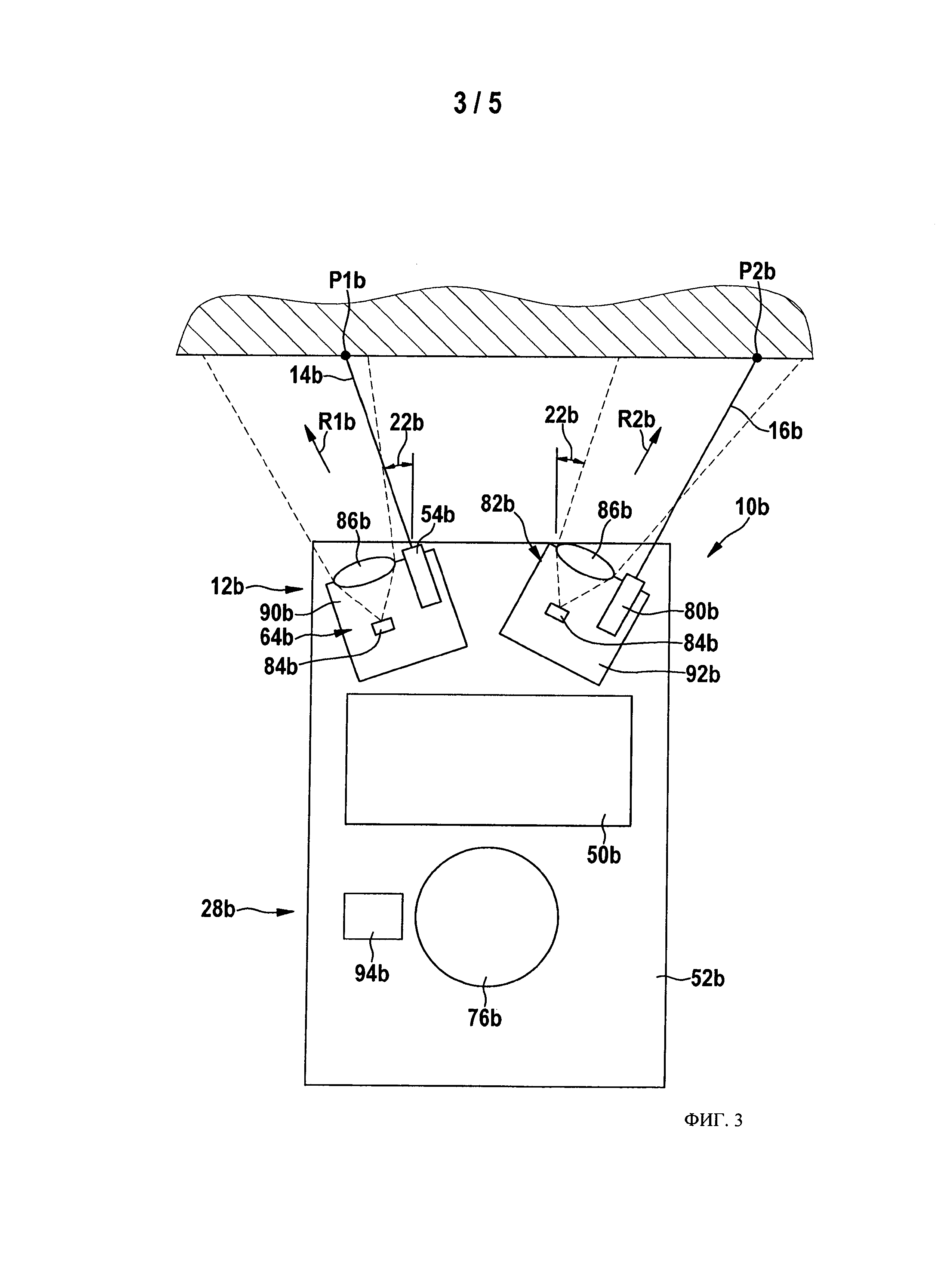
На фиг. 3-5 представлен другой пример осуществления настоящего изобретения. В приведенных ниже описании и чертежах основной упор сделан на различиях между примерами осуществления, а в отношении одинаково обозначенных конструктивных элементов, в частности элементов с одинаковыми ссылочными номерами, могут быть, в принципе, сделаны также ссылки на описание и/или чертежи, относящиеся к другим примерам осуществления, в частности к показанному на фиг. 1 и 2. Для проведения различия между примерами осуществления в ссылочных обозначениях на фиг. 1 и 2 использована буква "а", замененная буквой "b" на фиг. 3-5.
На фиг. 3 и 4 показан ручной лазерный дальномер 10b, содержащий лазерный узел 12b, устройство 28b ввода, дисплей 50b и корпус 52b. Лазерный узел 12b включает два лазера 54b, 80b и два датчика 64b, 82b. Датчики 64b, 82b содержат по одному фотодиоду 84b и по одной линзе 86b. Каждый из лазеров 54b, 80b установлен вместе с одним из датчиков 64b, 82b поворотным образом относительно корпуса 52b. Блок 56b управления лазерного узла 12b механическим образом связывает вращающуюся ручку 76b устройства 28b ввода и лазеры 54b, 80b для поворота последних. С этой целью в блоке 56b управления предусмотрены приводной ремень 88b и два вращающихся диска 90b, 92b. На каждом из дисков 90b, 92b смонтировано по одному лазеру 54b, 80b и одному датчику 64b, 82b. Вращающиеся диски 90b, 92b находятся в зубчатом зацеплении друг с другом. Приводной ремень 88b функционально соединяет устройство 28b ввода с одним из вращающихся дисков 90b. Специалистам в данной области известны другие, альтернативные, способы соединения. При вращении ручки 76b происходит противовращение дисков 90b, 92b. Этим обеспечивается возможность определения лазерным узлом 12b (посредством двух лазерных лучей 14b, 16b лазеров 54b, 80b) по одному расстоянию в первом относительном направлении R1b и во втором относительном направлении R2b. Для этого не показанный в деталях датчик угла определяет угол поворота 20b, 22b вращающихся дисков 90b, 92b, а не показанный в деталях вычислительный узел вычисляет расстояние между двумя точками P1b, P2b измерения лазерных лучей 14b, 16b. Процесс измерения запускается пользователем путем нажатия на клавишу 94b.
Во втором режиме измерения, представленном на фиг. 5, происходит поворот лазеров 54b, 80b и датчиков 64b, 82b в относительных направлениях R1b, R2b, параллельных друг другу, а лазерные лучи 14b, 16b посылаются в противоположных направлениях. Благодаря этому пользователь может особо удобным и эффективным образом измерять расстояния между двумя труднодостижимыми точками. При этом происходит поворот вращающихся дисков 90b, 92b вокруг одной оси 96b вращения наружу из корпуса 52b. В альтернативном варианте поворот вращающихся дисков может происходить внутри корпуса 52b.
Тормозное устройство технологической машины
Зажимное устройство ручной машины и ручная машина
Щетка стеклоочистителя
Способ калибровки точки насыщения вакуумного усилителя тормозного привода, вычисленной на основании сигнала от датчика давления
Обнаружение скрытого металлического или магнитного объекта
Рекуперационная установка
Гидравлическое оборудование для арматуры, предназначенной для добычи и транспорта преимущественно ископаемого топлива
Управление двигателем внутреннего сгорания для учета свойств топлива
Обнаружение скрытого диэлектрического объекта
Ручная машина с посадочной шейкой
Система вспрыскивания топлива в двигатель внутреннего сгорания
Привод с функцией аварийного закрытия
Топливная форсунка с датчиком давления
Способ и устройство для активизации абонентов шинной системы и соответствующий абонент
Отсоединение электроинструментов от сети с помощью выключателей
Насосный узел для подачи топлива, предпочтительно дизельного топлива, в двигатель внутреннего сгорания и способ сборки такого насосного узла
Система определения положения педали
Способ и устройство для определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность
Соединительное устройство для шарнирного соединения между собой рычага щетки стеклоочистителя и щетки стеклоочистителя
Топливная форсунка

