Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ СБОРКИ ДВИГАТЕЛЯ И СПОСОБ СБОРКИ И КОНТРОЛЯ ТАКОГО СБОРОЧНОГО УСТРОЙСТВА
Вид РИД
Изобретение
Изобретение относится к области линий сборки двигателей автотранспортных средств и, в частности, к устройствам для сборки двигателей.
Сборочные устройства или платформы для сборки двигателя выполнены с возможностью удержания и транспортировки двигателя во время его сборки, его заключения в корпус или его контроля, в частности, двигателей внутреннего сгорания. Как правило, каждую сборочную линию изменяют для каждого двигателя, что требует использования сборочной платформы, специально предусмотренной для данного двигателя. Такие платформы должны проходить через автоматические посты с точностью до 1,4 мм, должны быть эргономичными для оператора и обеспечивать не менее двух движений вращения и должны быть гибкими в применении, чтобы обеспечивать удержание двигателей разных типов.
В настоящее время существуют платформы двух типов: классические платформы и гибкие платформы. Классические платформы образуют единый блок и позволяют добиваться достаточно высокой точности при небольших затратах. Однако платформа этого типа не является гибкой, что затрудняет доступ к двигателю. Гибкие платформы обеспечивают более легкий доступ к двигателю, но не являются точными, поэтому такую платформу невозможно применять на автоматической линии. Кроме того, гибкие платформы ограничены с точки зрения эргономии, в частности, когда необходимо соединять много элементов в некоторых наименее доступных зонах, поэтому они не подходят для сборки дизельных двигателей.
Можно привести документ US 4,239,196, в котором описана гибкая сборочная платформа, установленная на роликах и содержащая раздвижное основание, соединенное с наклоняемой площадкой, на которой крепят двигатель при помощи системы винтов.
Можно также привести документ US 6,491, 293, в котором описана поворотная опора для двигателя, обеспечивающая вращение двигателя вокруг оси.
Однако крепление двигателя на таких сборочных платформах не является достаточно точным и не обеспечивает адаптации к разным двигателям, а также к автоматизированным сборочным линиям. Действительно, такие платформы имеют слишком много размеров и не могут быть точными. Этот недостаток можно устранить только за счет дорогих платформ.
Поэтому существует потребность в создании гибкой сборочной платформы для автоматических линий.
Таким образом, изобретение призвано устранить эти недостатки и предложить устройство сборки или платформу для сборки двигателя, которую можно адаптировать для многих двигателей и которая вместе с тем остается эргономичной, благодаря двум возможностям вращения, и является недорогой.
Изобретение призвано также повысить точность за счет сокращения интервалов допусков, чтобы максимально избегать ручных регулировок, с целью полной автоматизации процесса.
Первым объектом изобретения является устройство сборки двигателя, предназначенное для использования на сборочной линии, содержащее горизонтальное основание, первые средства вращения относительно первой оси вращения, перпендикулярной к основанию, вторые средства вращения относительно второй оси вращения, перпендикулярной к первой оси вращения, и переходник, предназначенный для соединения двигателя с основанием.
Сборочное устройство содержит средства реверсивного крепления переходника на основании.
Таким образом, переходник является съемным и взаимозаменяемым, что обеспечивает адаптацию ко многим двигателям, а также прямое взаимодействие со стендом контроля двигателя без замены платформы.
Предпочтительно средства реверсивного крепления содержат стягивающий уголок, содержащий центровочные элементы, выполненные с возможностью захождения в соответствующие отверстия на переходнике, и стягивающие средства, выполненные с возможностью крепления съемного переходника на стягивающем уголке.
Первые средства вращения содержат, например, горизонтальную площадку, соединенную с вертикальным участком, образуя первый поворотный уголок. Указанная горизонтальная площадка входит в контакт с основанием через элементы качения, обеспечивая, таким образом, первый поворот на 360° вокруг оси, перпендикулярной к горизонтальному основанию.
Горизонтальная площадка может быть соединена с вертикальным участком при помощи первого средства регулировки положения. Средства регулировки положения непосредственно при сборке платформы позволяют максимально сократить интервалы допуска и добиваться более высокой точности. Действительно, ограничение числа размеров за счет применения подкладок позволяет значительно уменьшить интервалы допусков.
Предпочтительно вторые средства вращения содержат средство приведения во вращение, закрепленное на одном конце первого поворотного уголка, и второй поворотный уголок, приводимый во вращение средством приведения во вращение и закрепленный на съемном переходнике.
Второй поворотный уголок может быть соединен со средством приведения во вращение при помощи второго средства регулировки положения.
Сборочное устройство дополнительно содержит средства направления поступательного движения стягивающего уголка относительно второго поворотного уголка.
Например, первый поворотный уголок содержит средства стопорения вращения второго поворотного уголка.
Сборочное устройство может содержать возвратную пружину, соединенную со стягивающим уголком и с вторым поворотным уголком, для создания возвратного усилия, стремящего отодвинуть стягивающий уголок от переходника.
Стягивающие средства содержат, например, системы винт-гайка.
Предпочтительно съемный переходник содержит средства центровки и крепления на двигателе.
Вторым объектом изобретения является способ сборки и контроля сборочного устройства по одному из предыдущих пунктов формулы изобретения, согласно которому горизонтальное основание позиционируют на сборочной и контрольной опоре при помощи первых средств центровки, контролируют положение основания при помощи первых средств контроля, позиционируют первые средства вращения на основании, контролируют положение первых средств вращения при помощи вторых средств контроля, позиционируют вторые средства вращения на первых средствах вращения и на средствах реверсивного крепления и контролируют положение вторых средств вращения при помощи третьих средств контроля.
Способ сборки и контроля можно осуществлять на одном посту, что позволяет быстро проверять качество монтажа и контролировать в дальнейшем размеры платформы.
Другие цели, отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве неограничивающего примера, со ссылками на прилагаемые чертежи.
на фиг. 1 показано сборочное устройство в соответствии с изобретением, вид спереди;
на фиг. 2 показано сборочное устройство, изображенное на фиг. 1, вид сверху;
на фиг. 3 показан соединительный переходник в соответствии с изобретением;
на фиг. 4a и 4b показаны положения смыкания и размыкания переходника;
на фиг. 5a-7b схематично представлены этапы сборки и контроля сборочного устройства, изображенного на фиг. 1.
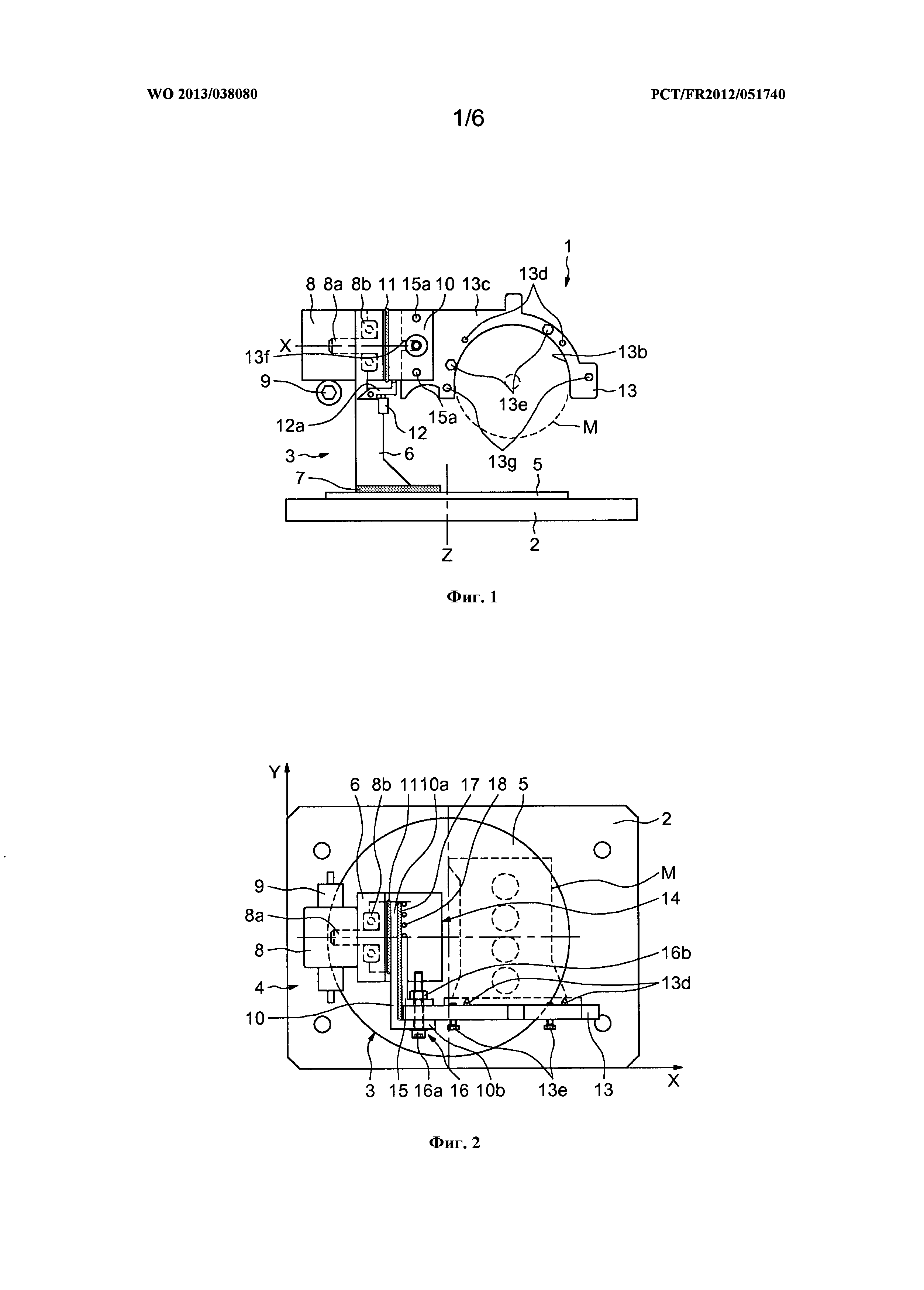
Сборочное устройство или сборочная платформа, показанная на фиг. 1 и обозначенная общей позицией 1, предназначена для удержания двигателя M, например, двигателя внутреннего сгорания, и для применения на автоматической сборочной линии (не показана).
Сборочное устройство 1 содержит горизонтальное основание 2, расположенное в плоскости XY, первые средства 3 вращения вокруг первой оси Z вращения, перпендикулярной к плоскости XY основания, и вторые средства 4 вращения вокруг второй оси X вращения, перпендикулярной к первой оси Z вращения.
Основание 2 имеет общую форму параллелепипеда и может быть установлено на элементах качения (не показаны) для обеспечения лучшей эргономии.
Первые средства 3 вращения содержат горизонтальную площадку 5, расположенную на горизонтальном основании 2, и вертикальный участок 6, выступающий над горизонтальной площадкой 5 вдоль оси Z, образуя первый поворотный уголок. Горизонтальная площадка 5 имеет общую круглую форму и входит в контакт с основанием 2 через элементы качения (не показаны), например, такие как центральный подшипник качения или двойные подшипники, расположенные на периферии горизонтальной площадки 5, обеспечивая поворот на 360° первого поворотного уголка 3 вокруг оси Z. Горизонтальная площадка 5 соединена с вертикальным участком 6 через первое средство 7 регулировки положения, такое как подкладки, обеспечивающие регулировку вдоль оси Z. Средства 7 регулировки положения, устанавливаемые непосредственно при сборке сборочной платформы 1, позволяют существенно уменьшить интервалы допусков и добиться, таким образом, более высокой точности платформы 1. Действительно, ограничение числа размеров посредством применения подкладок позволяет существенно уменьшить интервалы допусков. Таким образом, первый поворотный уголок 3 вращения на 360° регулируют по высоте при помощи одной или нескольких подкладок 7, поэтому он может не быть точным.
Вторые средства 4 вращения содержат средство 8 приведения во вращение, например, такое как редуктор, закрепленный на конце первого поворотного уголка 3, противоположном горизонтальной площадке 5, и вращаемый ручным или автоматическим внешним червячным приводом 9. Вторые средства 4 вращения дополнительно содержат второй поворотный уголок 10, вращаемый средством 8 приведения во вращение. Второй поворотный уголок 10 имеет общую форму "L" и содержит вертикальный участок 10a, входящий в контакт со средством 8 приведения во вращение через вал 8a, расположенный между подшипниками 8b, и поперечный участок 10b, перпендикулярный к вертикальному участку 10a. Второй поворотный уголок 10 соединен со средством 8 приведения во вращение при помощи второго средства 11 регулировки положения, такого как подкладки, обеспечивающие регулировку по оси X. Таким образом, положение второго поворотного уголка 10 регулируют при помощи одной или нескольких подкладок 11, вращение на 360° обеспечивает редуктор 8, а точную горизонтальность обеспечивают два съемных упора 12, расположенные с двух сторон от первого поворотного уголка 3 и регулируемые по высоте, например, при помощи двух подкладок (не показаны) или при помощи рычага 12a.
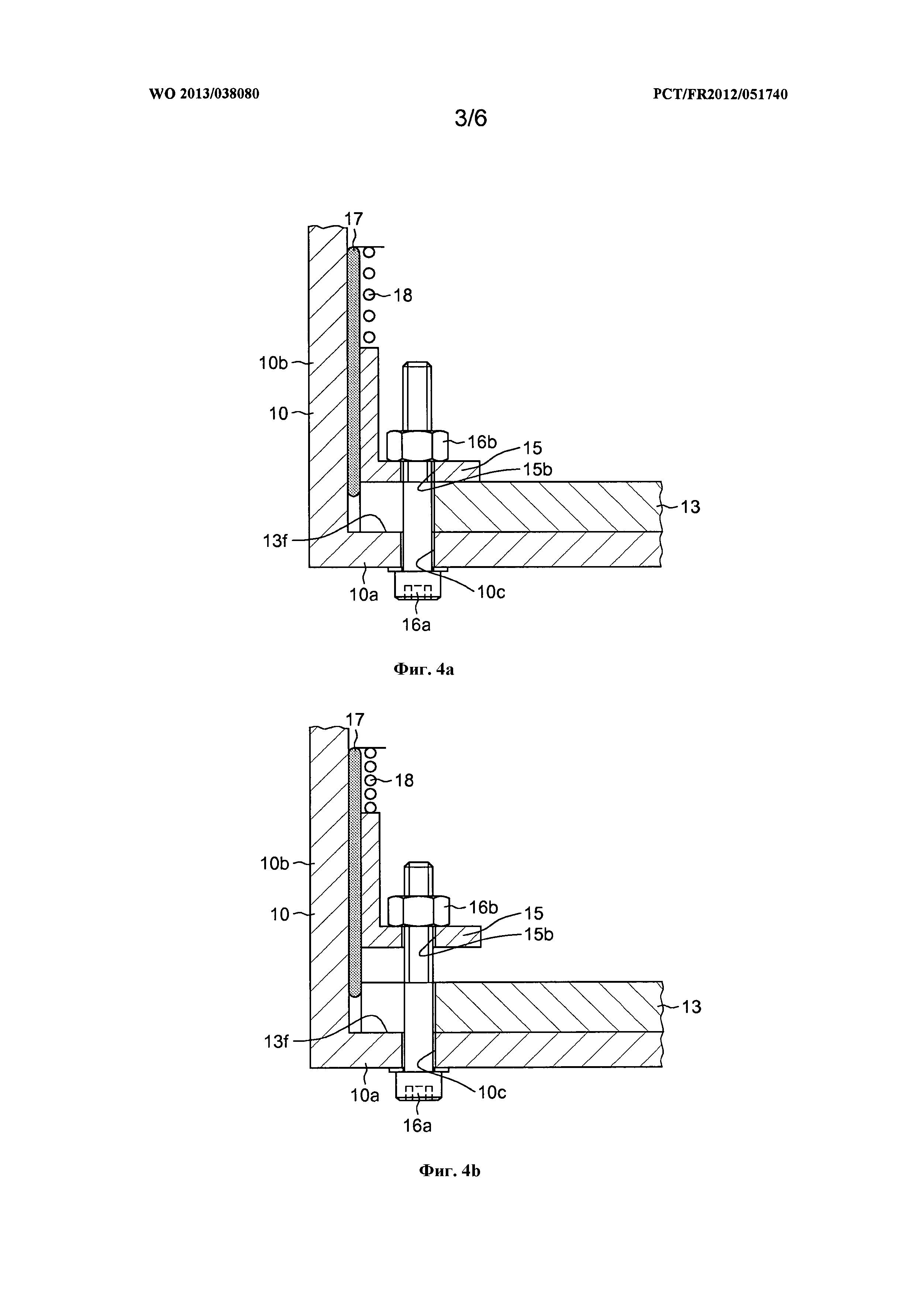
Сборочное устройство 1 дополнительно содержит соединительный переходник 13, предназначенный для соединения двигателя M с горизонтальным основанием 2 при помощи поворотных уголков 3, 10 и средств 14 реверсивного крепления переходника 13 на основании 2 таким образом, чтобы переходник 13 был съемным. Средства 14 реверсивного крепления содержат стягивающий уголок 15, содержащий выступающие части, образующие центровочные элементы 15a, выполненные с возможностью захождения в соответствующие отверстия 13a на переходнике 13, и стягивающие средства 16, выполненные с возможностью крепления съемного переходника 13 на стягивающем уголке 15. Таким образом, стягивающий уголок 15 обеспечивает точную центровку, благодаря наличию двух конусных центровочных элементов 15a, а также крепление переходника 13 при помощи системы 16 винт-гайка, вращаемой ручным или автоматическим внешним приводом (не показан).
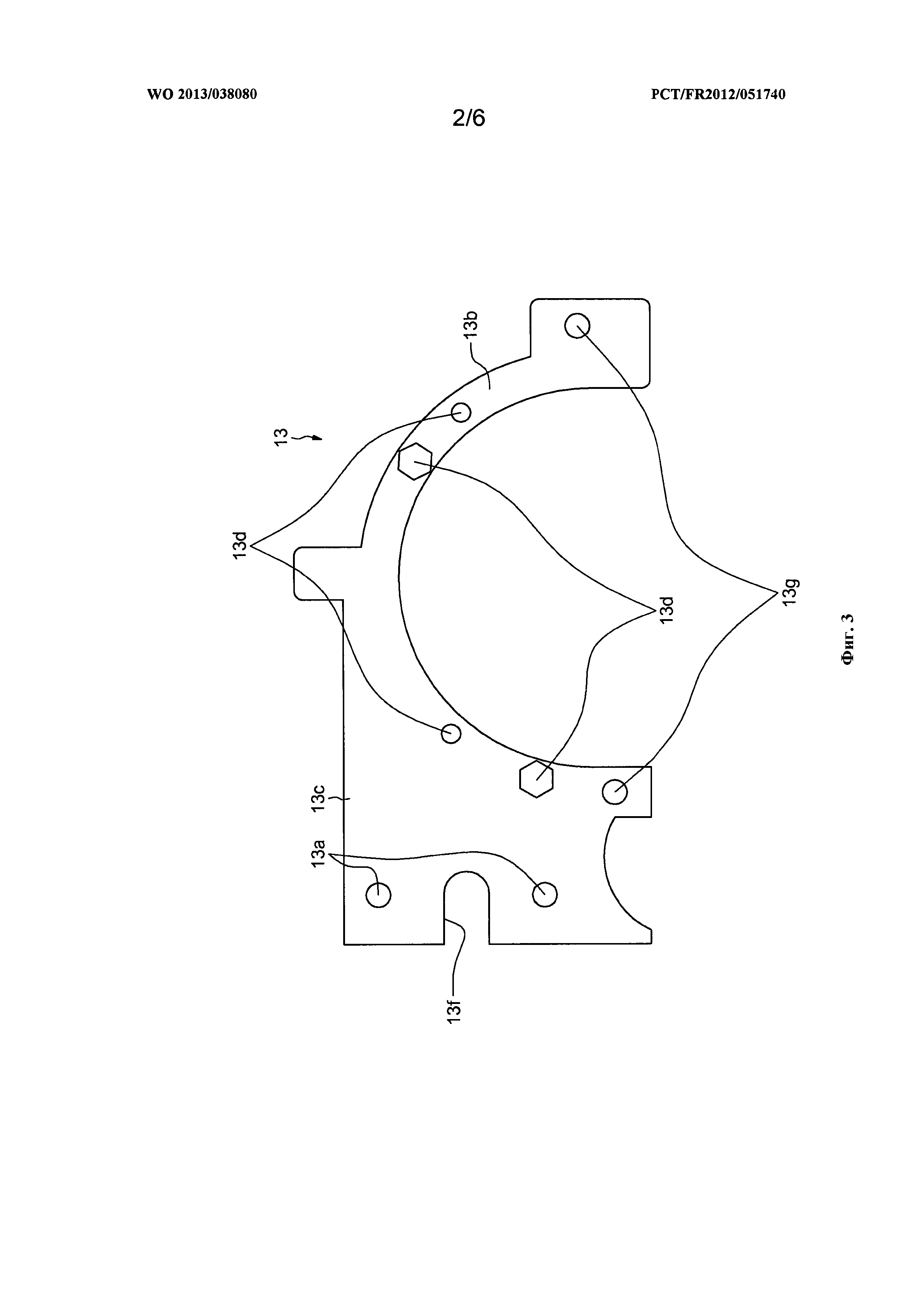
Съемный переходник 13 содержит первый полукруглый участок 13b удержания двигателя и второй участок 13c по существу в виде параллелепипеда, предназначенный для крепления на стягивающем уголке 15. Как показано на фиг. 2 и 3, первый удерживающий участок 13b содержит средства 13d центровки двигателя M и два отверстия (не показаны), обеспечивающие крепление двигателя винтами 13e. Таким образом, переходник 13 можно точно позиционировать на двигателе M при помощи двух центровочных элементов 13d и закрепить на двигателе M винтами 13e. Переходник можно отсоединять и размыкать вручную или автоматически, и он дополнительно содержит два точных отверстия 13a, взаимодействующих с центровочными элементами 15a стягивающего уголка 15, и открытое вытянутое отверстие 13f, предназначенное для взаимодействия со стягивающими средствами 16. Переходник 13 содержит также два отверстия 13g, позволяющие закрепить его на испытательном стенде (не показан) между соединительным переходником 13 и двигателем M с целью осуществления контроля двигателя M.
Стягивающие средства 16 содержат винт 16a, взаимодействующий с гайкой 16b, которые стопорятся, что позволяет предотвратить их потерю и вращение. Винт 16a заходит в отверстие 10c, выполненное на втором поворотном уголке 10, в вытянутое отверстие 13f переходника 13 и в отверстие 15b, выполненное на стягивающем уголке 15. За счет завинчивания винта 16a переходник 13 зажимают между вторым поворотным уголком 10 и стягивающим уголком 15.
Сборочное устройство 1 дополнительно содержит средства 17 направления поступательного движения, такие как направляющие, расположенные на втором поворотном уголке 10 и обеспечивающие поступательное перемещение стягивающего уголка 15 относительно второго поворотного уголка 10 во время вывинчивания винта 16a. Для этого со стягивающим уголком 15 и с направляющей 17 соединена возвратная пружина 17 для создания возвратного усилия, стремящегося отодвинуть стягивающий уголок 15 от переходника 13 во время вывинчивания винта 16a.
На фиг. 4a и 4b детально показано смыкание и размыкание переходника 13 на втором поворотном уголке 10. Когда винт 16a завинчивают, гайка 16b заставляет стягивающий уголок 15 поступательно перемещаться вдоль направляющей 17, пока он не дойдет до внутренней поверхности переходника 13. Таким образом, переходник 13 оказывается зажатым между стягивающим уголком 15 и вторым поворотным уголком 10. Во время вывинчивания винта 16a стягивающий уголок 15 отходит от переходника 13 под действием усилия возвратной пружины 18 и позволяет либо снять переходник 13, либо создать достаточное пространство для введения испытательного стенда (не показан) с целью тестирования двигателя M. Таким образом, размыкаемый переходник 13 позволяет одному и тому же сборочному устройству 1 удерживать двигатель M во время его сборки, а также во время его контроля на испытательном стенде.
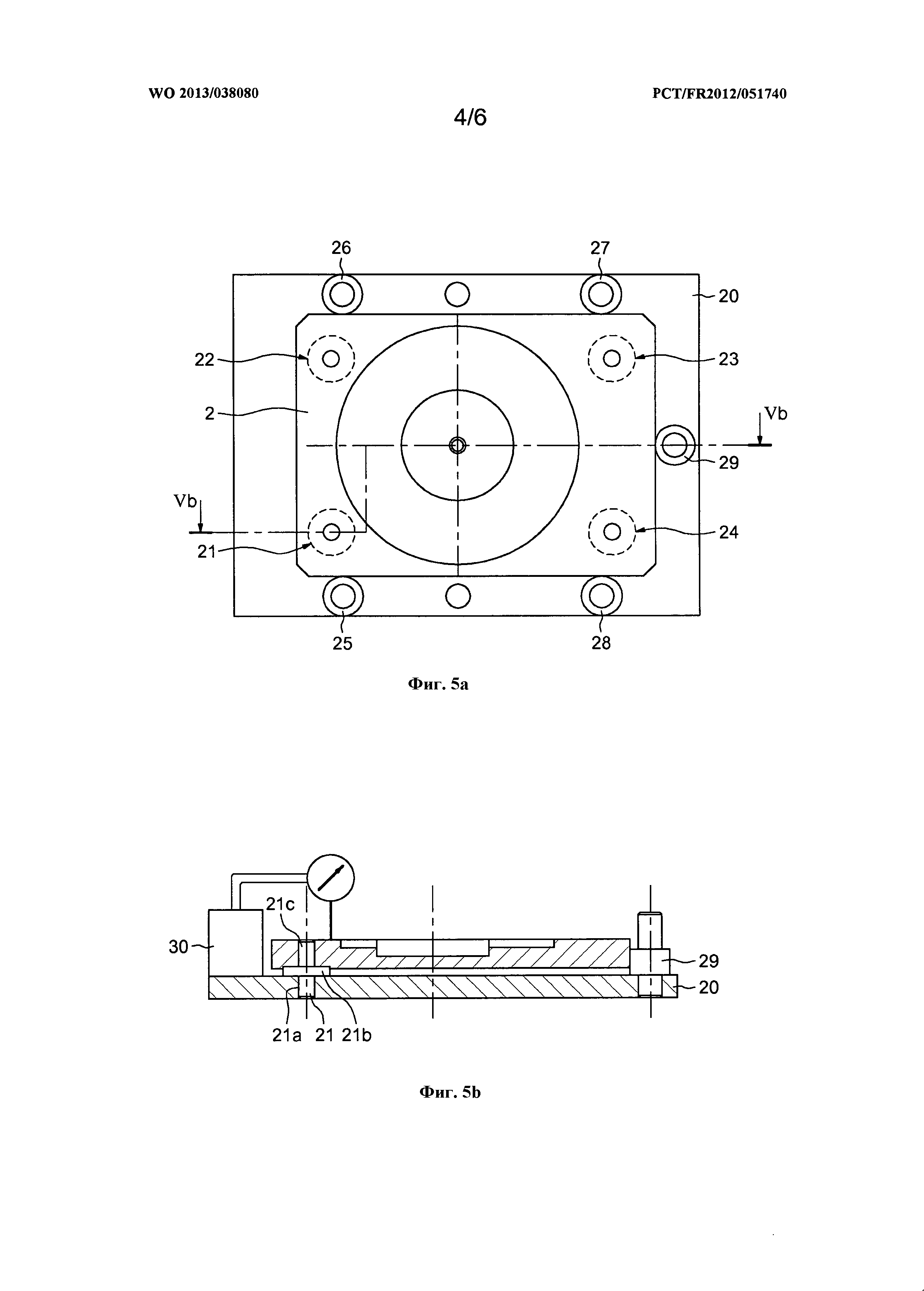
Способ сборки и контроля сборочного устройства 1 осуществляют следующим образом. На первом этапе, показанном на фиг.5a, 5b, горизонтальное основание 2 устанавливают на сборочной и контрольной опоре 20. Сборочная опора 20 имеет общую форму параллелепипеда и содержит многочисленные отверстия (не показаны), предназначенные для взаимодействия с центровочными средствами 21-29.
На первом этапе горизонтальное основание 2 центруют на центровочных средствах или штифтах 21-24, каждый из которых содержит первый цилиндрический участок 21a, предназначенный для захождения в соответствующее отверстие (не показано) на опоре 20, второй цилиндрический участок 21b большего диаметра, чем первый участок 21a, и третий цилиндрический участок 21c, по существу идентичный с первым участком 21a и предназначенный для захождения в соответствующее отверстие (не показано) на основании 2. Затем два центровочных элемента 25, 26, 27, 28 и 29 аналогично располагают в соответствующих отверстиях (не обозначены) на опоре 20. Центровочные элементы 21-29 позволяют центровать горизонтальное основание 2 на сборочной опоре 20, чтобы контролировать размеры основания 2. После центровки основания 2 на опоре 20 контролируют горизонтальность основания 2 при помощи первых средств 30 контроля, например, таких как уровни.
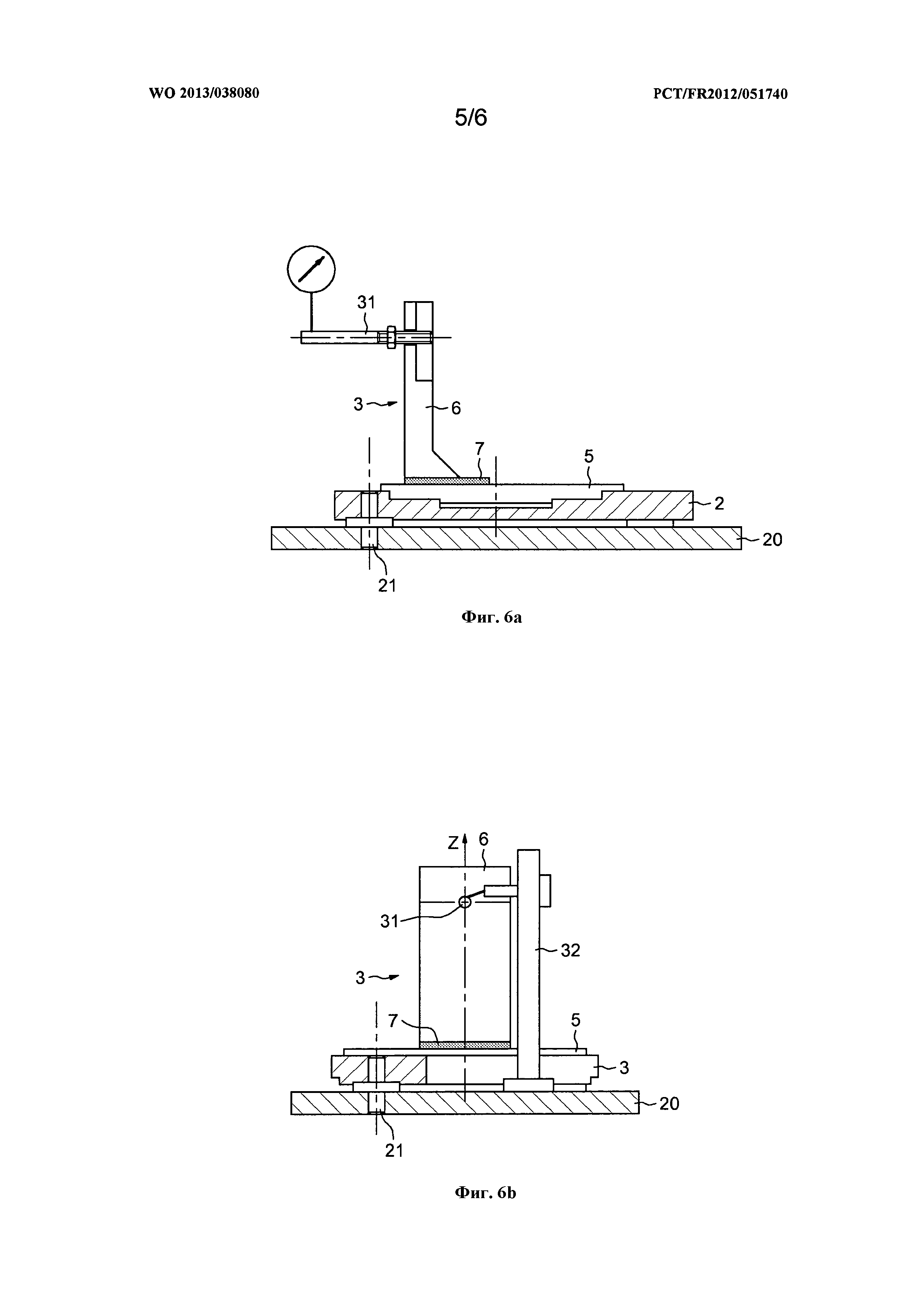
На втором этапе сборки или контроля, показанном на фиг. 6a, 6b, собирают или контролируют первый поворотный уголок 3, при этом горизонтальную площадку 5 поворотного уголка 3 позиционируют на горизонтальном основании 2. В соответствующее отверстие вертикального участка 6 вставляют измерительный инструмент 31. При помощи вторых средств 32 измерения, таких как метрологическая стойка, проверяют горизонтальность и высоту вдоль оси Z поворотного уголка 3. Если высота вдоль оси Z оказывается недостаточной, между горизонтальной площадкой 5 и вертикальным участком 6 поворотного уголка 3 вставляют одну или насколько подкладок 7.
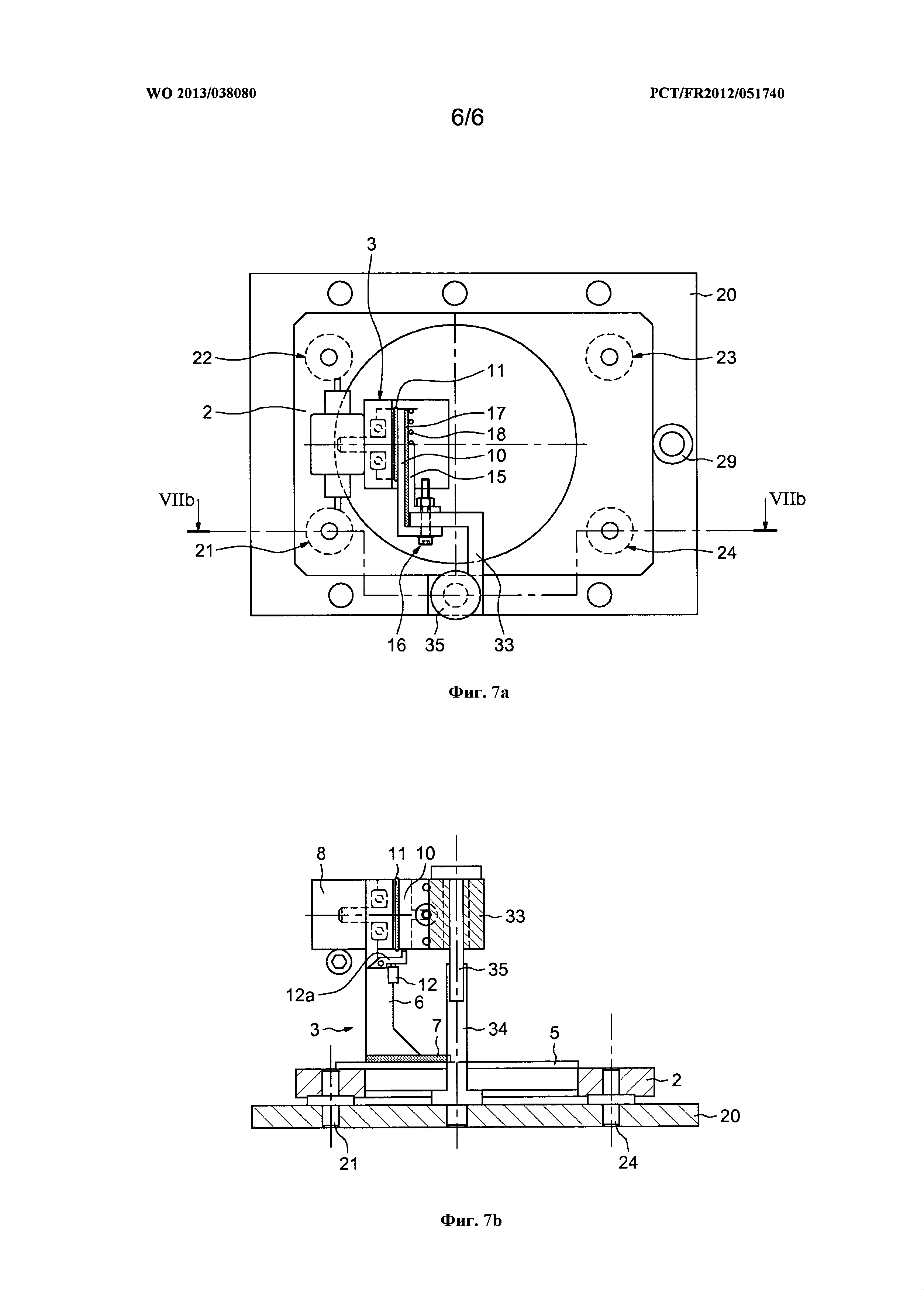
На третьем этапе сборки собирают или контролируют второй поворотный уголок 10, а также стягивающий уголок 15. Как показано на фиг. 7a и 7b, позиционируют второй поворотный уголок 10, направляющую 17, стягивающий уголок 15 и первый шаблон 33, устанавливаемый вместо соединительного переходника 13. Для этого первый шаблон 33 по существу имеет L-образную форму, и его располагают между стягивающим уголком 15 и вторым поворотным уголком 10. Весь комплекс приводят во вращение через редуктор 8, пока он не придет в положение упора в первый съемный упор 12, при помощи упорного рычага 12a.
После прихода в положение упора в соответствующее отверстие (не показано) на опоре 20 вставляют второй шаблон 34 в основном цилиндрической формы, который располагают вертикально вдоль оси Z, затем в отверстия (не показаны), выполненные соответственно в первом и втором шаблонах 33, 34, вставляют соединяющий их третий шаблон 35. При этом, если размеры сборочной платформы 1 являются правильными, отверстия, выполненные в первом и втором шаблонах 33, 34, являются коаксиальными. Такую же операцию осуществляют, когда комплекс приходит в положение упора в съемный упор 12, расположенный симметрично относительно поворотного уголка 3. Если шаблоны 33, 34, 35 не оказываются коаксиальными и не совмещаются, между вторым поворотным уголком и редуктором 8 можно установить одну или несколько подкладок 11, чтобы обеспечить регулировку вдоль оси X.
На последнем этапе сборки переходник 13 устанавливают между стягивающим уголком 15 и вторым поворотным уголком 10, как показано на фиг. 1.
Таким образом, все элементы устройства 1 сборки двигателя собирают и контролируют на единой сборочной и контрольной опоре, что позволяет обеспечивать быстрый и качественный монтаж.
Благодаря изобретению, сохраняется возможность вертикального и горизонтального вращений, что решает проблему эргономичности, и одновременно получают точную сборочную платформу при уменьшении числа размеров за счет применения различных подкладок, что позволяет повысить гибкость сборки. Действительно, размыкаемый и взаимозаменяемый переходник позволяет использовать платформу для многих типов двигателей.
Несимметричная камера сгорания для теплового двигателя
Конструкция для установки теплообменника на вертикальном конструктивном элементе, образующем переднюю техническую сторону автотранспортного средства
Радиочастотное устройство генерирования плазмы
Установка для скрепления обжатием открывающихся частей автомобилей
Устройство измерения в системе радиочастотного зажигания для двигателя внутреннего сгорания
Способ обработки сигнала, поступающего от датчика положения органа управления автотранспортного средства
Кузов автотранспортного средства, содержащий кронштейн для бампера, и канал впуска воздуха в двигатель
Способ обработки данных в устройстве обеспечения маневрирования на склоне автотранспортного средства
Способ диагностики состояния системы питания топливом двигателя
Способ диагностики состояния системы питания топливом двигателя
Несимметричная камера сгорания для теплового двигателя
Конструкция для установки теплообменника на вертикальном конструктивном элементе, образующем переднюю техническую сторону автотранспортного средства
Радиочастотное устройство генерирования плазмы
Установка для скрепления обжатием открывающихся частей автомобилей
Устройство измерения в системе радиочастотного зажигания для двигателя внутреннего сгорания
Способ обработки сигнала, поступающего от датчика положения органа управления автотранспортного средства
Кузов автотранспортного средства, содержащий кронштейн для бампера, и канал впуска воздуха в двигатель
Способ обработки данных в устройстве обеспечения маневрирования на склоне автотранспортного средства
Способ диагностики состояния системы питания топливом двигателя
Способ диагностики состояния системы питания топливом двигателя

