Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ ОПЕРАЦИИ РАЗБУРИВАНИЯ
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
Изобретение относится в основном к оборудованию буровой, такому как нефтепромысловое наземное оборудование, внутрискважинные узлы и тому подобное.
Системы разбуривания используются для разбуривания минеральных отложений, которые образовались на внутренних участках ствола скважины, или для разбуривания других закупорок в стволе скважины. Преимущество использования канатной системы разбуривания заключается в ее способности обеспечить точное разбуривание без использования колтюбинга или тяжелого наземного оборудования для циркуляции и транспортировки флюидов. Однако в отсутствие управления крутящим моментом на долоте и при действии слишком большого крутящего момента на долото вращательное движение может вызвать повреждение слабых мест в буровом снаряде или загрязнение призабойной зоны при заканчивании ствола скважины. Кроме того, когда толкающее усилие недостаточно велико, пользователь может не осознавать, что роторный модуль не срезает отложения, свободно вращаясь с высокой скоростью. Желательно иметь возможность выполнять операцию разбуривания автоматически, поскольку даже при измерении крутящего момента на долоте в реальном времени может быть сложно управлять инструментом в случае, когда пользователь должен изменять толкающее усилие на тяговом устройстве вручную. Операция может быть громоздкой и занимать много времени.
Желательно обеспечить удобное и интуитивно понятное управление инструментом, которое в то же время обеспечивает защиту инструмента. Также желательно обеспечить усовершенствования в нефтепромысловом наземном оборудовании и/или внутрискважинных узлах.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Способ согласно изобретению включает алгоритм для выполнения эффективного и интуитивного управления разбуриванием в стволе скважины, например скважины с обсаженным стволом. Алгоритм автоматического разбуривания приводит к регулируемому режиму удаления материала, в то же время сводя к минимуму необязательные взаимодействия с человеком.
Алгоритм автоматического разбуривания управляет узлом разбуривания, который использует по меньшей мере один колесный тяговый модуль для проталкивания долота разбуривающего модуля к минеральным отложениям, осуществляя давление на долото. Алгоритм автоматического разбуривания отслеживает значение крутящего момента от двигателя в разбуривающем модуле в виде обратной связи для того, чтобы генерировать соответствующее толкающее усилие от тягового модуля. Алгоритм пытается достичь заданного значения крутящего момента на долоте, установленного пользователем путем автоматической корректировки толкающего усилия тягового устройства с заданными пределами, также установленными пользователем. Благодаря высокому реактивному крутящему моменту алгоритм дает возможность эффективно удалять минеральные отложения, сводя к минимуму застревание долота, и позволяет пользователю предпринимать соответствующие действия (или совершать автоматические корректировки) в случаях застревания долота.
Узел разбуривания включает первый картридж электроники, который приводит в действие двигатель, вращающий долото, и измеряет крутящий момент для генерирования сигнала обратной связи в реальном времени. Узел разбуривания может включать второй картридж электроники, который приводит в действие тяговый модуль для управления толкающим усилием в ответ на сигнал обратной связи о крутящем моменте. Узел разбуривания присоединен к соответствующей линии связи скважины, такой как канатный кабель, отрезок колтюбинга или тому подобное. Линия связи скважины идет от поверхности ствола скважины и находится в коммуникационной связи с наземным оборудованием, контрольно-измерительным оборудованием и тому подобным. Алгоритм автоматического разбуривания может быть выполнен как микропрограммное и/или программное обеспечение, расположенное в одном или более из следующего: первого картриджа электроники, второго картриджа электроники и контрольно-измерительного оборудования на поверхности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие особенности и преимущества будут понятнее при обращении к следующему подробному описанию и при рассмотрении его вместе с сопроводительными чертежами.
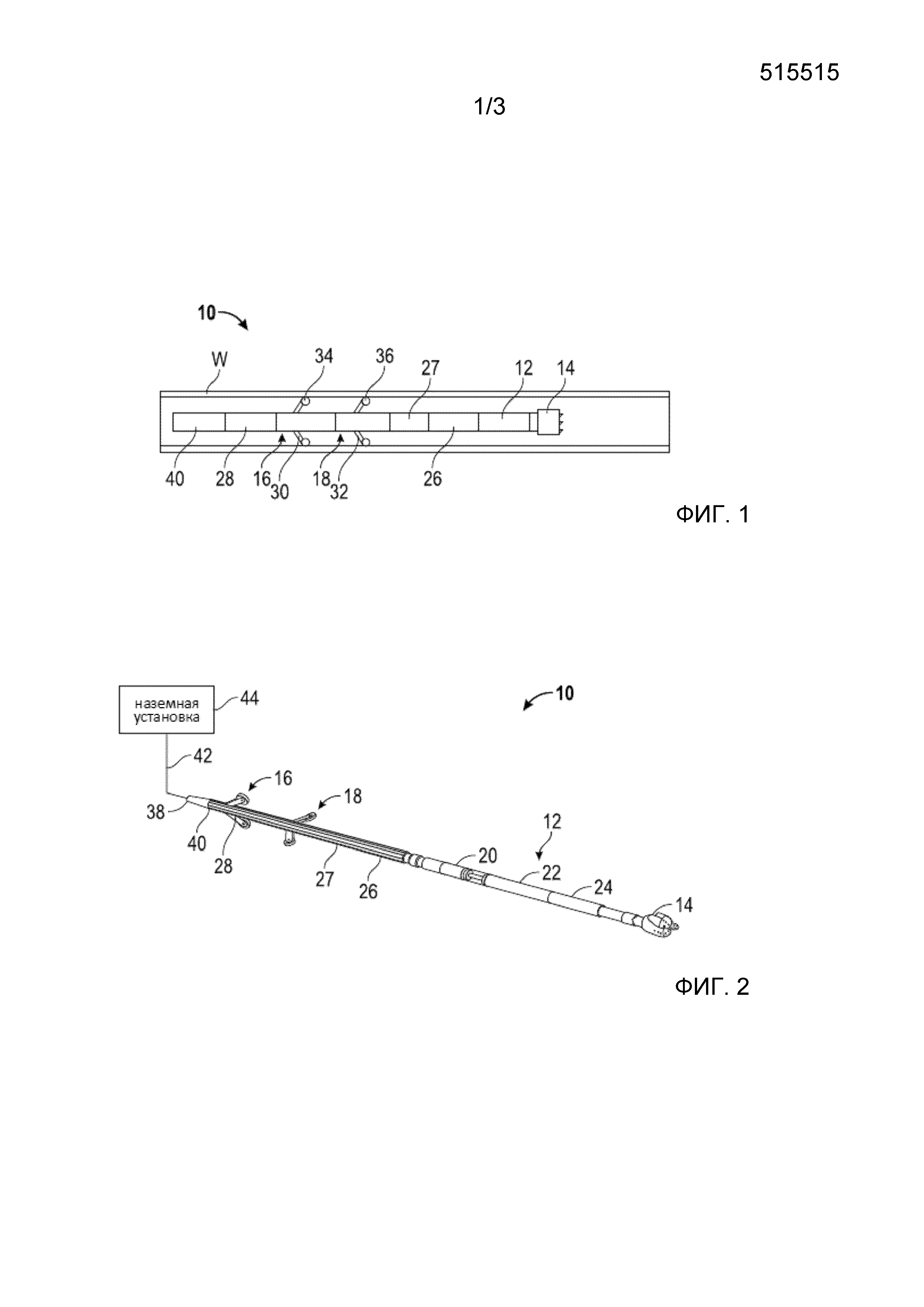
Фиг. 1 - поперечный разрез ствола скважины, показывающий узел разбуривания или узел забоя скважины согласно изобретению.
Фиг. 2 - вид в перспективе узла разбуривания или узла забоя скважины, показанного на фиг. 1.
Фиг. 3 - блок-схема способа выполнения автоматической процедуры разбуривания согласно изобретению.
Фиг. 4 - журнал испытания узла разбуривания и процедуры согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ НЕКОТОРЫХ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Обратимся к фиг. 1 и 2, на которых изображен узел разбуривания или узел забоя скважины, обозначенный, в основном, как 10. Узел 10 включает роторный или разбуривающий модуль 12 для приведения в действие шарошечного долота 14 и пару тяговых модулей 16 и 18 для продвижения узла 10 в ствол скважины W для передачи усилия шарошечному долоту 14 во время работы узла 10, что подробно описано ниже.
Роторный или разбуривающий модуль 12 включает компенсатор 20, двигатель 22 и редуктор 24, который присоединен к или находится в соединении с шарошечным долотом 14. Картридж электроники 26 обеспечивает энергопитание и телеметрию и запрашивает или получает телеметрию от различных компонентов 14, 20, 22, 24 роторного модуля 12 и управляет работой роторного модуля. Двигатель 22 может представлять собой трехфазный магнитный синхронный электродвигатель постоянного тока, который управляется картриджем электроники 26. Картридж 26 может выполнять профильное управление в рамках своего микропрограммного обеспечения.
Картридж электроники 28 обеспечивает энергопитание и телеметрию и запрашивает или получает телеметрию от тяговых модулей 16 и 18. Тяговые модули 16 и 18, каждый, могут включать шарнирно вытянутые плечи 30 и 32 с колесами 34 и 36 на своих свободных концах для вращения и контакта со стенками ствола скважины, такой как скважина с открытым стволом или обсаженная скважина W, показанная на фиг. 1, что понятно специалистам в данной области техники. Тяговые модули 16 и 18 могут включать двигатель (не показан), такой как электрический двигатель, гидравлический двигатель или тому подобное, для вытягивания и втягивания плечей 30 и 32 и для вращения и приведения в действие колес 34 и 36. Узел 10 также может включать компенсаторный модуль 27, как маслобак гидросистемы, используемый для открытия тяговых плечей 30 и 32. Когда колеса 34 и 36 входят в контакт со стволом скважины, то тяговые модули 16 и 18 обеспечивают толкающее усилие для узла 10 в направлении долота 14. Картриджи электроники 26 и 28 связаны между собой, что способствует управлению узлом 10, как подробно описано ниже. Несмотря на то, что изображенные варианты воплощения изобретения показывают совокупность картриджей электроники 26 и 28, специалисты в данной области техники осознают, что электронику картриджей 26 и 28 можно объединять в одном картридже, который обладает такой же функциональностью, как каждый из картриджей 26 и 28. Узел 10 может, кроме того, включать дополнительный толкающий модуль или модули для обеспечения толкающего усилия узлу 10 в направлении долота 14, например линейный электродвигатель и якорный узел для сцепки со стволом скважины в дополнение к или вместо тяговых модулей 16 и 18 во время управления узлом 10, что подробно описано ниже.
Узел 10 дополнительно включает записывающую головку 38 на противоположном рабочему конце шарошечного долота 14 и картридж телеметрии 40, присоединенный к записывающей головке 38. Записывающая головка 38 может быть присоединена к соответствующей линии связи скважины 42, такой как канатный кабель, отрезок колтюбинга или тому подобное. Линия связи скважины 42 идет от поверхности ствола скважины и находится в коммуникационной связи с наземным оборудованием, контрольно-измерительным оборудованием и тому подобным, идентифицируемым как наземная установка 44 для передачи энергопитания, телеметрии и управляющих сигналов. Пользователь может управлять работой узла 10 с наземной установки 44, включая установление заданного значения крутящего момента, установление предельного значения толкающего усилия, пуск вращения долота 14 и пуск алгоритма автоматического разбуривания.
При работе узел 10 размещают в стволе скважины на линии связи скважины и перемещают в желательное местоположение внутри ствола скважины. В стволах скважин, таких как горизонтальные или наклонные стволы скважин или им подобные, тяговые модули 16 и 18 можно использовать для того, чтобы продвинуть вперед узел 10 до желательного местоположения посредством сцепки со стенками ствола скважины. В этом желательном местоположении, в стволе скважины находится закупорка, такая как минеральные отложения или тому подобное, и узел 10 используется для удаления минерального отложения, как изложено здесь далее.
Разбуривающий модуль 12 приводят в действие для вращения долота 14, и плечи 30 и 32 и колеса 34 и 36 тяговых модулей 16 и 18 приводят в контакт со стволом скважины для того, чтобы переместить узел 10 таким образом, чтобы долото 14 входило в контакт с закупоркой или минеральным отложением. Во время работы разбуривающего модуля картридж электроники 26 управляет скоростью двигателя 22 и данные о фазном токе от двигателя 22 используются для управления выходным крутящим моментом двигателя 22. Исходя из данных о фазном токе, программное обеспечение в картридже электроники 26 рассчитывает значение крутящего момента, действующего на вал двигателя 22. Рассчитанное значение крутящего момента используется для передачи измерений крутящего момента в реальном времени на поверхность через картридж телеметрии 40 или тому подобное. Это рассчитанное значение крутящего момента также используется для запроса корректировки толкающего усилия от картриджа электроники 28 и тяговых модулей 16 и 18. Измерение крутящего момента в реальном времени обеспечено картриджем электроники 26, поскольку он запускает двигатель 22 в роторном модуле 12, а информация о крутящем моменте передается на картридж 28 со скоростью, достаточной для корректировки толкающего усилия от тяговых модулей 16 и 18, как подробно описано ниже.
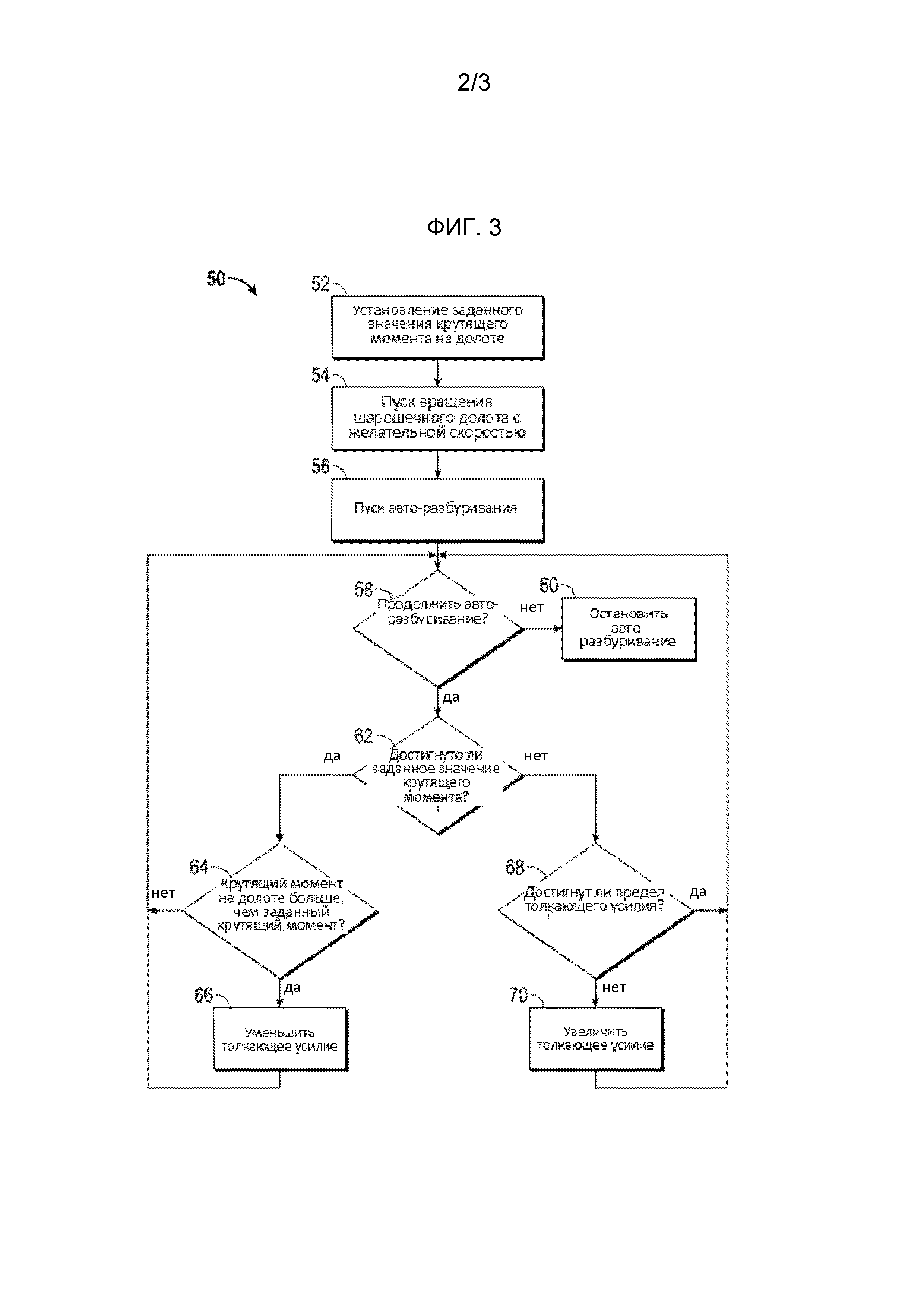
На фиг. 3 показан способ выполнения алгоритма автоматического разбуривания или алгоритм авторазбуривания, обозначенный как 50. На этапе 52 заданный крутящий момент на долоте и предел толкающего усилия устанавливаются пользователем, например, на графическом пользовательском интерфейсе (не показан) или аналогичным образом на наземной установке 44. На этапе 54 шарошечное долото 14 вращается с желательной скоростью. На этапе 56 начинается алгоритм авторазбуривания. В точке принятия решения 58 алгоритм авторазбуривания оценивает возможность продолжения операции. Если алгоритм должен прекратить операцию (ветвь «Нет»), например, от команды от пользователя, поступающей на графический пользовательский интерфейс или тому подобное, то алгоритм останавливается на этапе 60. Если алгоритм должен продолжать операцию (ветвь «Да»), то в точке принятия решения 62 оценивается крутящий момент (рассчитанный от разбуривающего модуля 12) для того, чтобы определить, достигнут ли заданный крутящий момент. Если заданный крутящий момент достигнут (ветвь «Да»), то в точке принятия решения 64 оценивается крутящий момент для того, чтобы определить больше ли он, чем заданный крутящий момент. Если рассчитанный крутящий момент не больше, чем заданный крутящий момент (ветвь «Нет»), то способ 50 возвращается в точку принятия решения 58, чтобы оценить, продолжать ли алгоритм авторазбуривания. Если заданный крутящий момент больше, чем заданный крутящий момент (ветвь «Да»), то толкающее усилие (на тяговых модулях 16 и 18 и/или на линейном электродвигателе и якорном узле или тому подобное) уменьшается на этапе 66 и способ 50 возвращается в точку принятия решения 58, чтобы оценить, продолжать ли алгоритм авторазбуривания. Если в точке принятия решения 62 заданный крутящий момент не достигнут (ветвь «Нет»), то в точке принятия решения 68 оценивается толкающее усилие (на тяговых модулях 16 и 18), чтобы определить, достигнут ли предел толкающего усилия. Если предел толкающего усилия достигнут (ветвь «Да»), то способ 50 возвращается в точку принятия решения 58, чтобы оценить, продолжать ли алгоритм авторазбуривания. Если предел толкающего усилия не достигнут (ветвь «Нет»), то толкающее усилие (на тяговых модулях 16 и 18) увеличивается на этапе 70, после которого способ 50 возвращается в точку принятия решения 58, чтобы оценить, продолжать ли алгоритм авторазбуривания.
Модуль электроники 28 (например, с микропрограммным обеспечением или тому подобное) корректирует толкающее усилие от тяговых устройств 16 и 18, используя, например, пропорционально-дифференциальное управление для регулировки толкающего усилия от тяговых устройств 16 и 18 для того, чтобы в ответ быстро изменять значения крутящего момента от модуля электроники 26 роторного модуля 12.
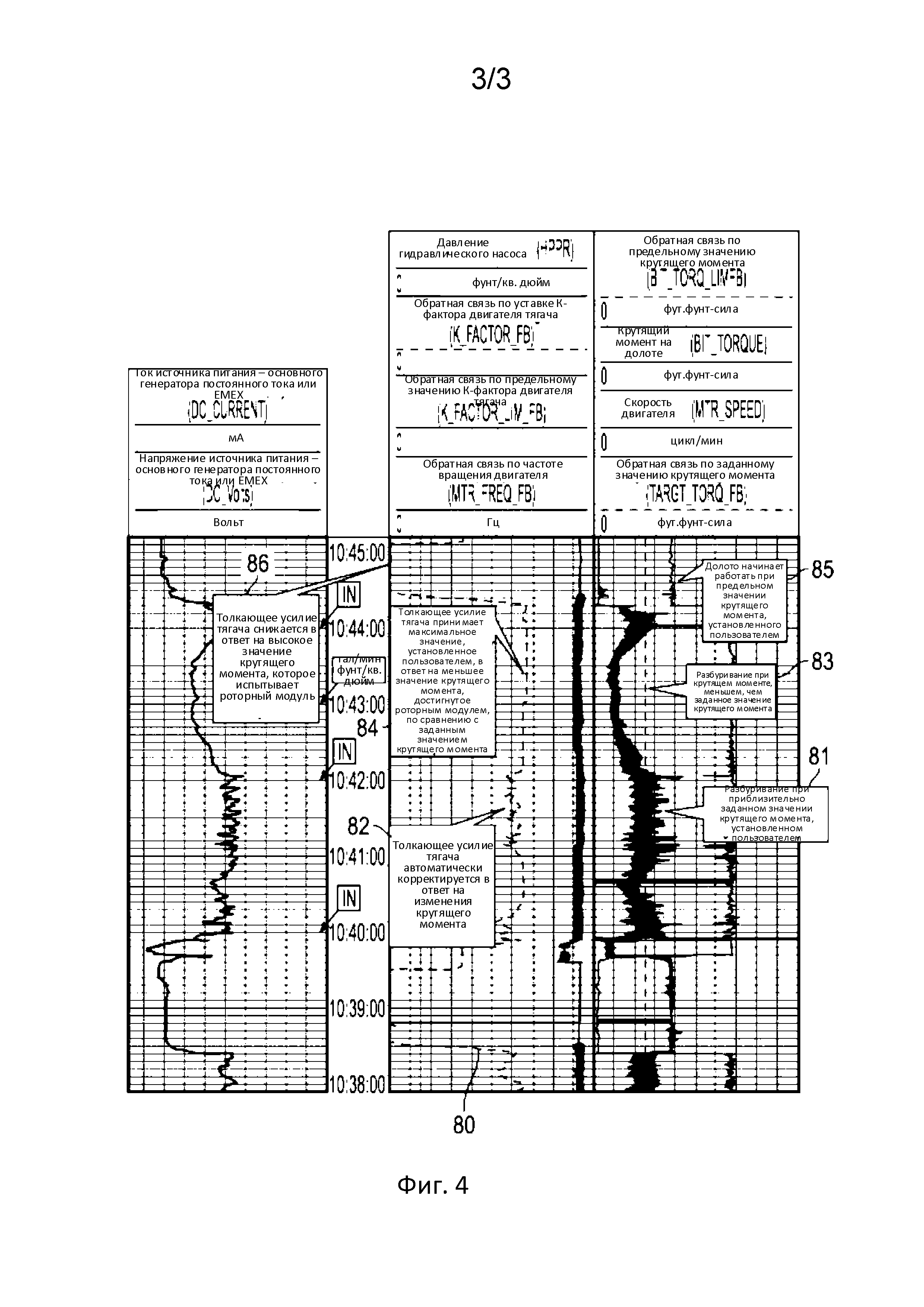
На фиг. 4 показан журнал архивных записей испытаний операции разбуривания на испытательном стенде для арматуры замкнутого типа. Журнал показывает алгоритм автоматического разбуривания в действии, когда инструмент срезает обломочные породы, расположенные внутри испытуемой трубы. Линия 80 в середине колонны показывает тяговые модули 16 и 18, автоматически корректирующие толкающее усилие (например, точка 82) для того, чтобы достичь разбуривания при приблизительно заданном крутящем моменте на долоте 14, установленном пользователем (точка 81). Однако, когда предел толкающего усилия тягового устройства также устанавливается пользователем (как отмечено на этапе 52 на фиг. 3), то толкающее усилие тягового устройства имеет значение предела (максимальное значение, установленное пользователем, показанное в точке 84), когда крутящий момент на долоте меньше, чем его заданное значение (точка 83). В таком случае пользователь может выбрать увеличение предела толкающего усилия для того, чтобы попытаться снова увеличить скорость срезания на долоте 14.
Если долото 14 застревает во время операции (см. точку 85), то алгоритм автоматического разбуривания воспринимает режим застревания и может предпринять несколько действий для того, чтобы снова освободить долото 14 и тем самым противодействовать режиму застревания. Например, алгоритм автоматического разбуривания может вытянуть тяговые модули 16 и 18 назад (например, путем вращения колес 34 и 36 в противоположном направлении для обеспечения толкающего усилия на узел 10 в направлении от долота 14) для того, чтобы снизить или реверсировать толкающее усилие (см. точку 86), когда долото 14 остается заблокированным в минеральных отложениях. Если действие реверса или вытягивание тяговых модулей 16 и 18 не освобождают долото 14, то долото 14 с целью его разблокировки можно привести во вращение в противоположном направлении. В некоторых случаях для освобождения долота вытягивание тяговых модулей 16 и 18 и поворот долота 14 в противоположном направлении можно применять одновременно. Некоторые из этих действий при обнаружении застрявшего долота 14 могут быть автоматизированы в микропрограммном обеспечении как часть алгоритма.
Изобретение описывает алгоритм для выполнения эффективного и интуитивно понятного управления разбуриванием в стволе скважины, например, в условиях скважины с обсаженным стволом. Алгоритм автоматического разбуривания приводит к регулируемому режиму удаления материала, в то же время сводя к минимуму необязательные взаимодействия с человеком.
Для проталкивания долота роторного модуля в направлении минеральных отложений алгоритм автоматического разбуривания использует колесное тяговое устройство, оказывающее давление на долото. Алгоритм автоматического разбуривания отслеживает значение крутящего момента от роторного модуля в виде обратной связи для того, чтобы генерировать соответствующее толкающее усилие от тягового инструмента. Алгоритм пытается достичь заданного крутящего момента на долоте, установленного пользователем, путем автоматической корректировки толкающего усилия тягового устройства в заданных пределах, также установленных пользователем. Благодаря высокому реактивному крутящему моменту алгоритм обеспечивает эффективное удаление материала, сводя к минимуму застревание долота, и позволяет пользователю предпринимать соответствующие действия (или осуществлять автоматические корректировки) в случаях застревания долота. Алгоритм автоматического разбуривания может быть выполнен как микропрограммное и/или программное обеспечение, расположенное в одном или более из следующего: первого картриджа электроники 26, второго картриджа электроники 28 и наземной установки 44.
Предыдущее описание представлено со ссылкой на настоящие варианты воплощения изобретения. Специалисты в этой области техники и в технологии, к которой относится это изобретение, понимают, что в описанные структуры и способы управления могут быть внесены вариации и изменения на практике без отклонения от сути, принципа и объема изобретения. Соответственно вышеизложенное описание не следует рассматривать как относящееся только к точным структурам, описанным и показанным на сопроводительных чертежах, но скорее следует понимать как совмещаемое с и поддерживающее нижеследующую формулу изобретения в ее самом полном и очевидном объеме.
Способ синхронизации импульсов при гетерогенном размещении для гидравлического разрыва пласта
Прямой способ канализирования и система для увеличения проводимости разрыва
Система и способ оценки структур трещин
Интенсификация с помощью природного газа
Определение режима течения для адаптации модели потока
Система охлаждения наземного нефтепромыслового оборудования
Система и способ выполнения скважинных операций гидроразрыва
Идентификация и сообщение насосов гидроразрыва
Флюиды и способ, включающие наноцеллюлозу
Способ обработки скважины с отведением с помощью способного разлагаться материала
Система управления на основе винтового забойного механизма
Способ оптимизации интенсификации ствола скважины
Блок горелки для сжигания низкокалорийных газов
Способ и система сжигания выбросов
Способ и устройство инициирования огневой цепи
Система и способ оптимальной настройки регулятора потока
Способ и устройство распределенных систем увеличенной досягаемости в нефтяных месторождениях
Способ проверки геометрии трещины для микросейсмических событий
Система и способ доставки нефтепромысловых материалов
Способ синхронизации импульсов при гетерогенном размещении для гидравлического разрыва пласта

