Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ ТРЕХОСНОГО ЛАЗЕРНОГО ГИРОСКОПА
Вид РИД
Изобретение
Изобретение относится к области гироскопического приборостроения и предназначено для определения величин масштабных коэффициентов трехосных лазерных гироскопов (ТЛГ) с взаимно ортогональными осями чувствительности при проведении калибровки (паспортизации) бесплатформенных инерциальных навигационных систем, построенных на основе ТЛГ, или их составных частей.
ТЛГ могут выполняться как в виде трех одноосных лазерных гироскопов, установленных на общем основании, так и в виде трех кольцевых лазеров, выполненных в едином моноблоке. После изготовления ТЛГ необходимо определить масштабные коэффициенты его осей чувствительности.
Известен способ определения масштабного коэффициента кольцевого лазера (А.с. SU 1797432, приоритет от 01.08.1990, «Способ определения масштабного коэффициента кольцевого лазера», авторы: Голяев Ю.Д., Соловьева Т.И., Колбас Ю.Ю., Мещеряков Б.М., МПК H01S 3/083, опубл. 10.08.1996 бюл. №22). Сущность данного способа заключается в следующем. Кольцевой лазер (КЛ) жестко закрепляют на планшайбе поворотного стола (далее по тексту - планшайба), совмещая его ось чувствительности с осью вращения планшайбы. Планшайбу последовательно поворачивают в двух противоположных направлениях (против и по часовой стрелке) на один и тот же угол αT, причем против часовой стрелки (2n+1) раз, а по часовой стрелке - 2n раз (n=1, 2, …). При каждом повороте регистрируют число выходных информационных импульсов КЛ. Далее вычисляют средние значения чисел выходных информационных импульсов: при поворотах по часовой стрелке -  , против часовой стрелки -
, против часовой стрелки -  . Затем определяют масштабный коэффициент КЛ по формуле
. Затем определяют масштабный коэффициент КЛ по формуле  .
.
Данный способ имеет следующие недостатки:
- неравное количество поворотов КЛ по часовой стрелке и против часовой стрелки при наличии нелинейной во времени составляющей смещения нуля (дрейфе) обуславливает увеличение погрешности определения масштабного коэффициента КЛ;
- совмещение оси чувствительности КЛ с осью вращения планшайбы обеспечивается только технологически, что обуславливает увеличение погрешности определения масштабного коэффициента КЛ.
Вышеперечисленные недостатки существенно снижают точность определения масштабного коэффициента КЛ и сужают область возможного применения способа.
Известен способ определения масштабного коэффициента одноосного лазерного гироскопа (ЛГ) (IEEE Std 647-1995. IEEE Standard Specification Format Guide and Test Procedure for Single-Axis Laser Gyros., The Institute of Electrical and Electronics Engineers, Inc, 3 Park Avenue, New York, NY 10016-5997, USA), при котором ЛГ жестко закрепляют на планшайбе таким образом, чтобы ось чувствительности ЛГ была параллельна оси вращения планшайбы. Планшайбу последовательно поворачивают в двух противоположных направлениях на один и тот же угол αT=(360°×n), где n=1, 2, …. При каждом повороте регистрируют число и знак выходных информационных импульсов ЛГ. Далее вычисляют суммарное число информационных импульсов: при повороте по часовой стрелке - N-, а также против часовой стрелки - N+. Затем определяют масштабный коэффициент по формуле  .
.
Указанное решение является наиболее близким по технической сущности к заявляемому способу и выбрано в качестве наиболее близкого аналога.
Недостатком известного способа является то, что ориентация оси чувствительности ЛГ параллельно оси вращения планшайбы обеспечивается только технологически, поскольку расположение его оси чувствительности относительно базовой установочной поверхности точно неизвестно. Это обуславливает увеличение погрешности определения масштабного коэффициента ЛГ.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании способа определения масштабных коэффициентов ТЛГ с взаимно ортогональными осями чувствительности.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является повышение точности определения масштабных коэффициентов ТЛГ.
Данный технический результат достигается следующим образом. ТЛГ устанавливают на планшайбу поворотного стола. Ось чувствительности, у которой определяют масштабный коэффициент (тестируемая ось), ориентируют коллинеарно оси вращения планшайбы, затем последовательно поворачивают планшайбу в двух противоположных направлениях (по и против часовой стрелки) на фиксированный угол, регистрируют с выхода гироскопа количество и знак информационных импульсов по данной оси чувствительности и вычисляют величину ее масштабного коэффициента, как отношение удвоенного значения заданного угла поворота к разности между количеством информационных импульсов, зарегистрированных при вращении планшайбы против часов стрелки и по часовой стрелке. Для ориентации оси чувствительности ТЛГ коллинеарно оси вращения планшайбы две другие оси чувствительности методом последовательных приближений выставляют ортогонально оси вращения планшайбы, причем данное положение осей характеризуется минимальными проекциями приращений углов, измеряемых этими двумя осями чувствительности при последовательных поворотах планшайбы в противоположных направлениях («нулевое положение») (для компенсации вращения Земли).
За счет выставки двух осей чувствительности ТЛГ ортогонально оси вращения планшайбы («нулевое» положение), которая характеризуется минимальными («нулевыми») проекциями приращений углов, измеряемых этими двумя осями чувствительности при повороте планшайбы, уменьшается погрешность ориентирования третьей (тестируемой) оси чувствительности коллинеарно оси вращения планшайбы, что повышает точность определения масштабных коэффициентов ТЛГ. Масштабные коэффициенты двух других осей чувствительности ТЛГ определяют аналогично, после выполнения процедуры выставки соответствующих осей чувствительности ТЛГ в «нулевое» положение.
Заявляемый способ подробно поясняется на примере ТЛГ моноблочной конструкции, симметричной относительно главной оси симметрии трехгранного угла, образованного осями чувствительности ТЛГ.
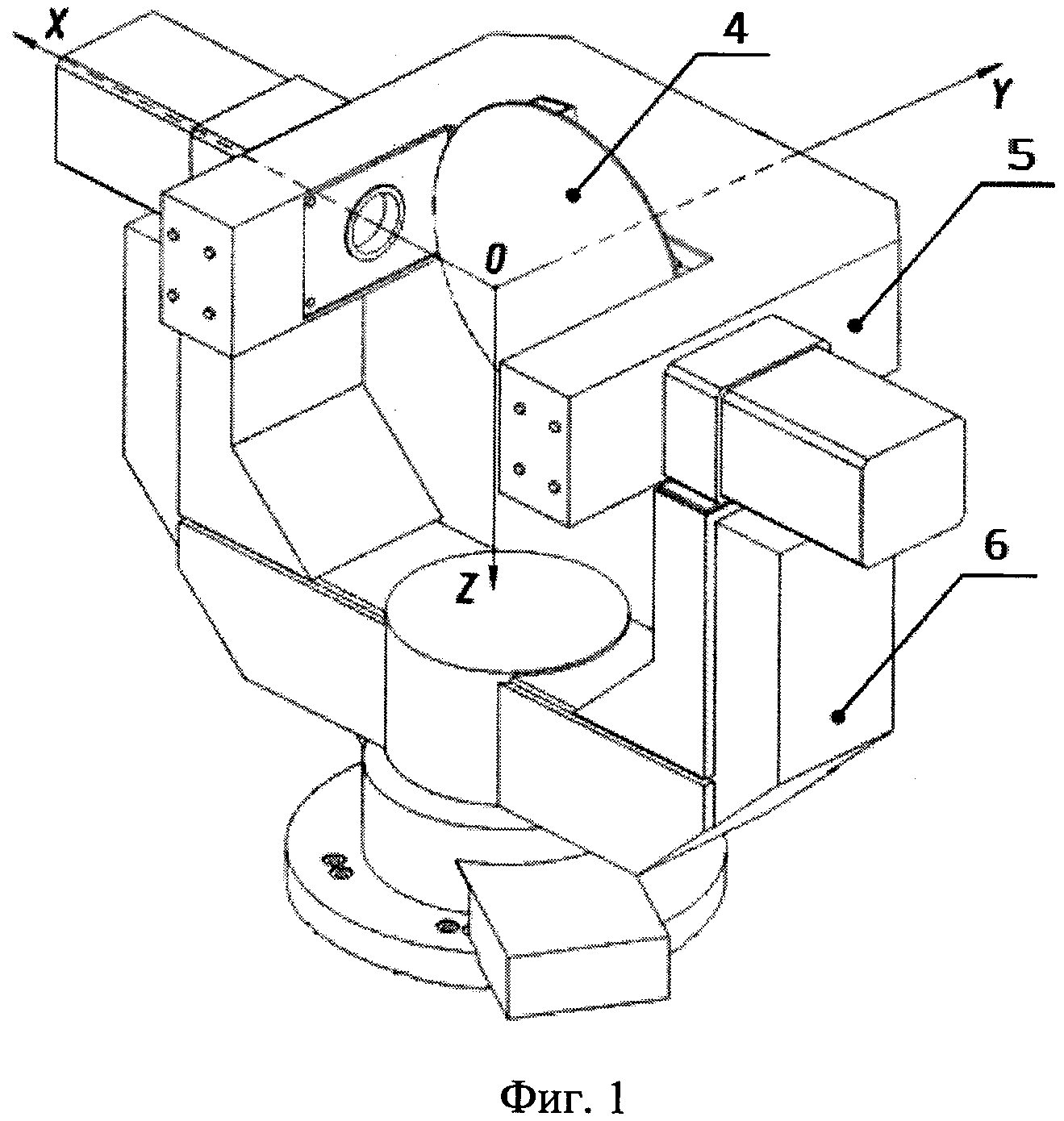
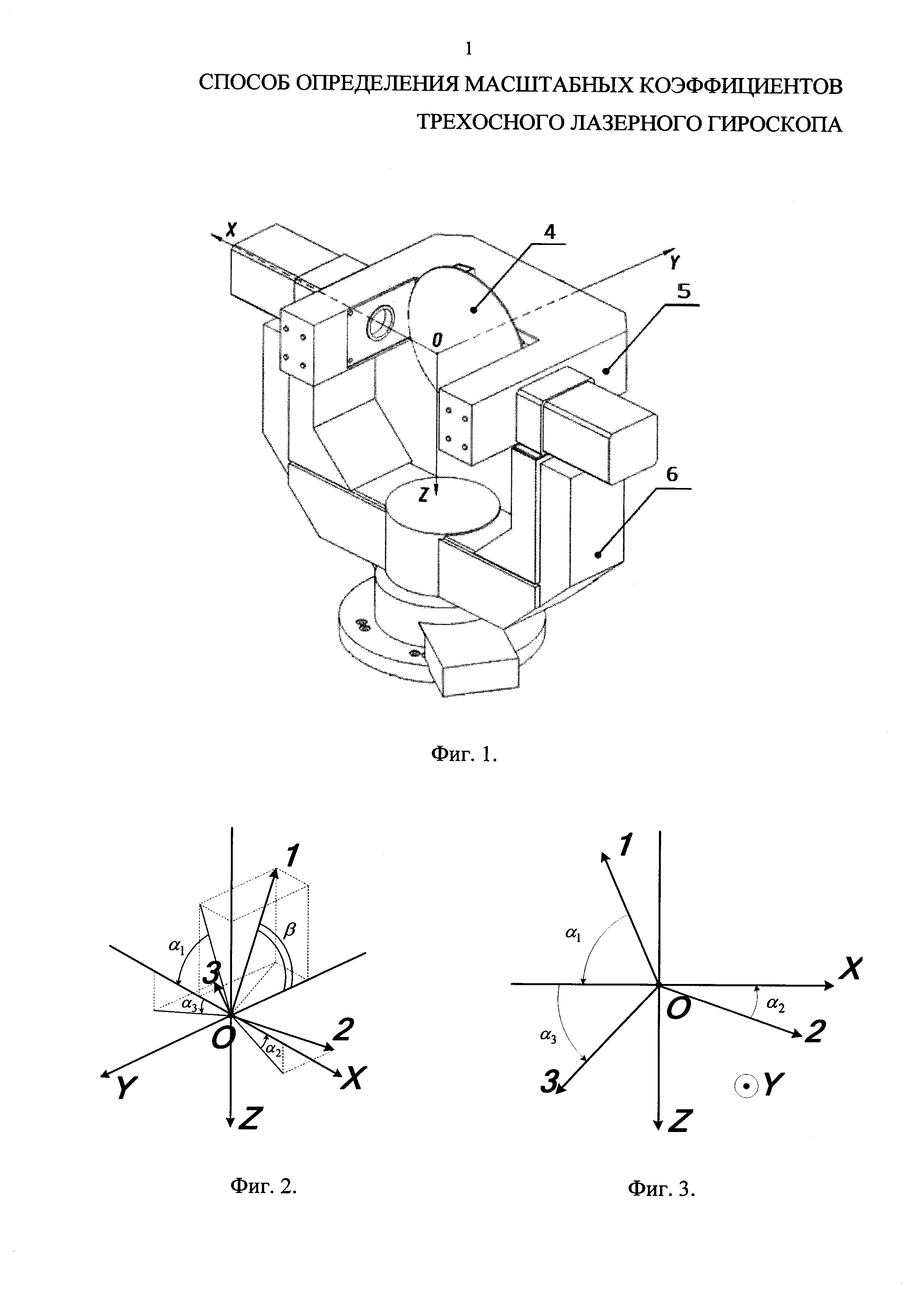
На фиг. 1 схематично изображен наклонно-поворотный стол (НПС), с использованием которого можно реализовать заявляемый способ. Данный НПС имеет следующие основные технические характеристики: погрешность позиционирования планшайбы НПС - не более 1 угл.с, неортогональность смежных осей вращения НПС - не более 2 угл.с.
На фиг. 1 введены следующие обозначения: 4 - планшайба НПС; 5 - средняя рама НПС; 6 - внешняя рама НПС; ОХ - ось наклонов планшайбы (или ось вращения средней рамы); OY - ось поворотов планшайбы; OZ - ось вращения планшайбы (или ось вращения внешней рамы).
На фиг. 2 представлено схематичное расположение осей чувствительности ТЛГ относительно осей вращения планшайбы НПС.
На фиг. 3 показано схематичное расположение проекций осей чувствительности ТЛГ на планшайбу НПС.
На фиг. 2 и 3 введены следующие обозначения: 1, 2, 3 - взаимно ортогональные оси чувствительности ТЛГ; α1, α2, α3 - углы между горизонтальными проекциями осей чувствительности на установочную плоскость планшайбы и осью ОХ НПС; β - номинальное значение угла между осями чувствительности ТЛГ и главной осью симметрии трехгранного угла, образованного осями чувствительности ТЛГ.
Способ определения масштабных коэффициентов ТЛГ реализуется следующим образом.
Предварительно выполняют установку ТЛГ непосредственно на планшайбу НПС. К точности установки ТЛГ на планшайбе требований не предъявляется. Задают начальную ориентацию осей вращения рам НПС из исходного состояния таким образом, чтобы они образовали правую прямоугольную СК OXYZ НПС (фиг. 1), связанную с осями вращения НПС. Начало СК НПС (точка О) совмещено с точкой пересечения осей вращения рам НПС. Ось ОХ совпадает с положительным направлением оси вращения средней рамы НПС (если смотреть из начала СК НПС, то по часовой стрелке). Ось OY совпадает с положительным направлением оси вращения внутренней рамы стенда, наклоненной на угол минус 90° относительно оси ОХ. Ось OZ дополняет СК НПС до правой и совпадает с положительным направлением оси вращения внешней рамы НПС.
Затем выполняют процедуру выставки двух осей чувствительности ТЛГ в «нулевое» положение, которое подразумевает одновременную ортогональность двух осей чувствительности ТЛГ оси вращения внешней рамы НПС (фиг. 1) и характеризуется «нулевыми» проекциями приращения углов, измеряемых этими двумя осями чувствительности при повороте внешней рамы НПС. При этом третья ось чувствительности ТЛГ будет коллинеарна оси вращения внешней рамы НПС.
Выставку осей чувствительности ТЛГ в «нулевое» положение осуществляют следующим образом. Последовательно выполняют серию поворотов ТЛГ в противоположных направлениях относительно осей ОХ и OZ стенда (фиг. 1) на один и тот же угол αT. При этом фиксируют показания ТЛГ в импульсах по трем осям чувствительности:  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  . Здесь знак «+» означает вращение вокруг соответствующей оси НПС против часовой стрелки, знак «-» - вращение по часовой стрелке. Показания ТЛГ после компенсации вращения Земли можно представить в виде
. Здесь знак «+» означает вращение вокруг соответствующей оси НПС против часовой стрелки, знак «-» - вращение по часовой стрелке. Показания ТЛГ после компенсации вращения Земли можно представить в виде
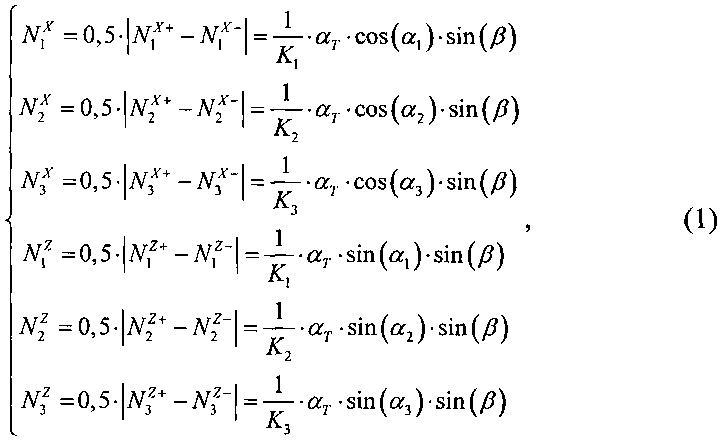
где  ,
,  ,
,  - количество информационных импульсов, накопленных 1-ой, 2-ой и 3-ей осями чувствительности ТЛГ, при вращении относительно оси ОХ (фиг. 2 и 3);
- количество информационных импульсов, накопленных 1-ой, 2-ой и 3-ей осями чувствительности ТЛГ, при вращении относительно оси ОХ (фиг. 2 и 3);
 ,
,  ,
,  - количество информационных импульсов, накопленных 1-ой, 2-ой и 3-ей осями чувствительности ТЛГ, при вращении относительно оси OZ (фиг. 2 и 3);
- количество информационных импульсов, накопленных 1-ой, 2-ой и 3-ей осями чувствительности ТЛГ, при вращении относительно оси OZ (фиг. 2 и 3);
K1, K2 и K3 - искомые значения масштабных коэффициентов соответствующих осей чувствительности ТЛГ;
α1, α2, α3 - углы между горизонтальными проекциями осей чувствительности на основание ТЛГ (или на установочную плоскость планшайбы НПС - плоскость XOZ) и осью ОХ НПС (фиг. 2 и 3);
β - номинальное значение угла между i-ой осью чувствительности ТЛГ (i=1, 2, 3) и главной осью симметрии трехгранного угла, образованного осями чувствительности ТЛГ. После проведения начальной ориентации осей вращения НПС главная ось симметрии совпадает с осью OY НПС (фиг. 2 и 3).
Зная угол β и определив из выражений (1) углы α1, α2 и α3, поворотами ТЛГ на соответствующие углы относительно осей OY и ОХ НПС (фиг. 1) выполняют предварительную выставку двух осей чувствительности ТЛГ в «нулевое» положение - в плоскость, ортогональную оси OZ НПС. Далее, для наглядности, в качестве выставляемых в «нулевое» положение выбраны 1-ая и 2-ая оси чувствительности ТЛГ (фиг. 2 и 3). Последовательно совершают повороты ТЛГ в противоположных направлениях на один и тот же угол αT относительно оси OZ НПС. При этом снова фиксируют показания ТЛГ по трем осям чувствительности в импульсах (после компенсации вращения Земли) -  ,
,  ,
,  , и определяют углы отклонения 1-ой и 2-ой осей чувствительности ТЛГ от «нулевого» положения:
, и определяют углы отклонения 1-ой и 2-ой осей чувствительности ТЛГ от «нулевого» положения:

Если  , где δ - заданная точность выставки осей в «нулевое» положение, то принимают Δφ1=Δφ2=Δφ. В этом случае необходимый угол поворота относительно оси ОХ НПС для выставки 1-ой и 2-ой осей чувствительности ТЛГ в «нулевое» положение определяют из выражения
, где δ - заданная точность выставки осей в «нулевое» положение, то принимают Δφ1=Δφ2=Δφ. В этом случае необходимый угол поворота относительно оси ОХ НПС для выставки 1-ой и 2-ой осей чувствительности ТЛГ в «нулевое» положение определяют из выражения

Если  , то из выражения:
, то из выражения:

определяют угол поворота ТЛГ относительно оси OY НПС, который необходимо выполнить для совпадения значений проекций, измеряемых 1-ой и 2-ой осями чувствительности. После выполняют поворот ТЛГ на угол ΔφOY, определенный из выражения (4), и снова последовательно совершают повороты планшайбы НПС в противоположных направлениях на угол αT относительно оси OZ НПС. При этом снова фиксируют показания ТЛГ по трем осям чувствительности в импульсах (после компенсации вращения Земли) и с помощью выражения (2) заново оценивают и сравнивают между собой значения углов Δφ1 и Δφ2. Данную процедуру повторяют до выполнения условия .
После совершения поворота ТЛГ относительно оси ОХ НПС на угол ΔφOX, определенный из выражения (3), принимают данное положение ТЛГ за найденное «нулевое» и процедуру выставки 1-ой и 2-ой осей чувствительности считают законченной. При этом полагают, что 3-я ось чувствительности ТЛГ совпадает с осью вращения внешней рамы НПС - ось OZ (фиг. 1). Последовательно выполняют повороты планшайбы НПС в противоположных направлениях на угол αT относительно оси OZ НПС. По зафиксированным показаниям ТЛГ N+ и N- (в импульсах) для 3-ей оси чувствительности рассчитывают величину масштабного коэффициента

Далее, используя ранее определенные углы α1, α2 и α3, проводят выставку следующих двух осей чувствительности ТЛГ (например, 3-ей и 1-ой) в «нулевое» положение и определяют величину масштабного коэффициента 2-ой оси чувствительности. Аналогичные действия выполняют при определении масштабного коэффициента 1-ой оси чувствительности ТЛГ.
Авторами разработана и экспериментально проверена методика определения масштабных коэффициентов ТЛГ заявляемым способом с применением трехосного НПС. При проверке использовали датчик угловых скоростей, построенный на базе ТЛГ. В качестве исходных данных задавали следующие параметры:
- величина угла поворота - αT=1800° (при скорости вращения 100°/с);
- номинальное значение угла - β=54°44′08′′;
- заданная точность выставки двух осей чувствительности ТЛГ в «нулевое» положение - δ≤5′′.
Результаты испытаний подтвердили работоспособность заявляемого способа и достижение заявленного технического результата. При этом погрешность определения масштабных коэффициентов датчика угловых скоростей не превысила 1,7·10-6 относительных единиц.
Способ определения коэффициентов отражения или пропускания оптических деталей
Способ изготовления светопоглощающих элементов оптических систем на титановых подложках
Многоканальный регистратор деформаций
Способ и устройство крепления крупногабаритного зеркала оптико-механического устройства в оправе (варианты)
Способ получения герметичного корпуса микроэлектронного устройства с контролируемой средой в его внутреннем объеме
Способ настройки резонатора лазерного излучателя
Устройство для определения параметров уравнения состояния вещества, изоэнтропически сжатого до сверхвысоких давлений
Переход волоконно-оптический
Устройство передачи детонации
Способ фиксации аэродинамического руля летательного аппарата
Способ определения неортогональности осей чувствительности лазерного гироскопа
Импульсный стабилизатор тока
Трёхкоординатное устройство обнаружения и распознавания объектов монокулярными оптико-электронными приборами наземных и воздушных робототехнических комплексов на основе стереоскопического 3d-мониторинга

