Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА Т - ОБРАЗНОМ ПЕРЕКРЕСТКЕ ДОРОГ
Вид РИД
Изобретение
Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной зоной обнаружения (ПЗО), построенных на радиоволновом или инфракрасном принципах обнаружения, для сигнализационного прикрытия Т-образного перекрестка дорог.[1]
Часто маршрут движения нарушителя проходит по имеющейся сети дорог на местности. Во многом успех задержания нарушителя зависит от знания направления его движения. Поэтому сигнализационному прикрытию перекрестков дорог уделяется значительное внимание. На практике для этого широко применяются СО с протяженной зоной обнаружения (ПЗО), построенные на радиоволновом или инфракрасном принципах обнаружения. Конкретные значения длины зоны обнаружения рассматриваемых СО определяются тактико-техническими характеристиками и, как правило, лежат в пределах от 50 до 200 м. [1]
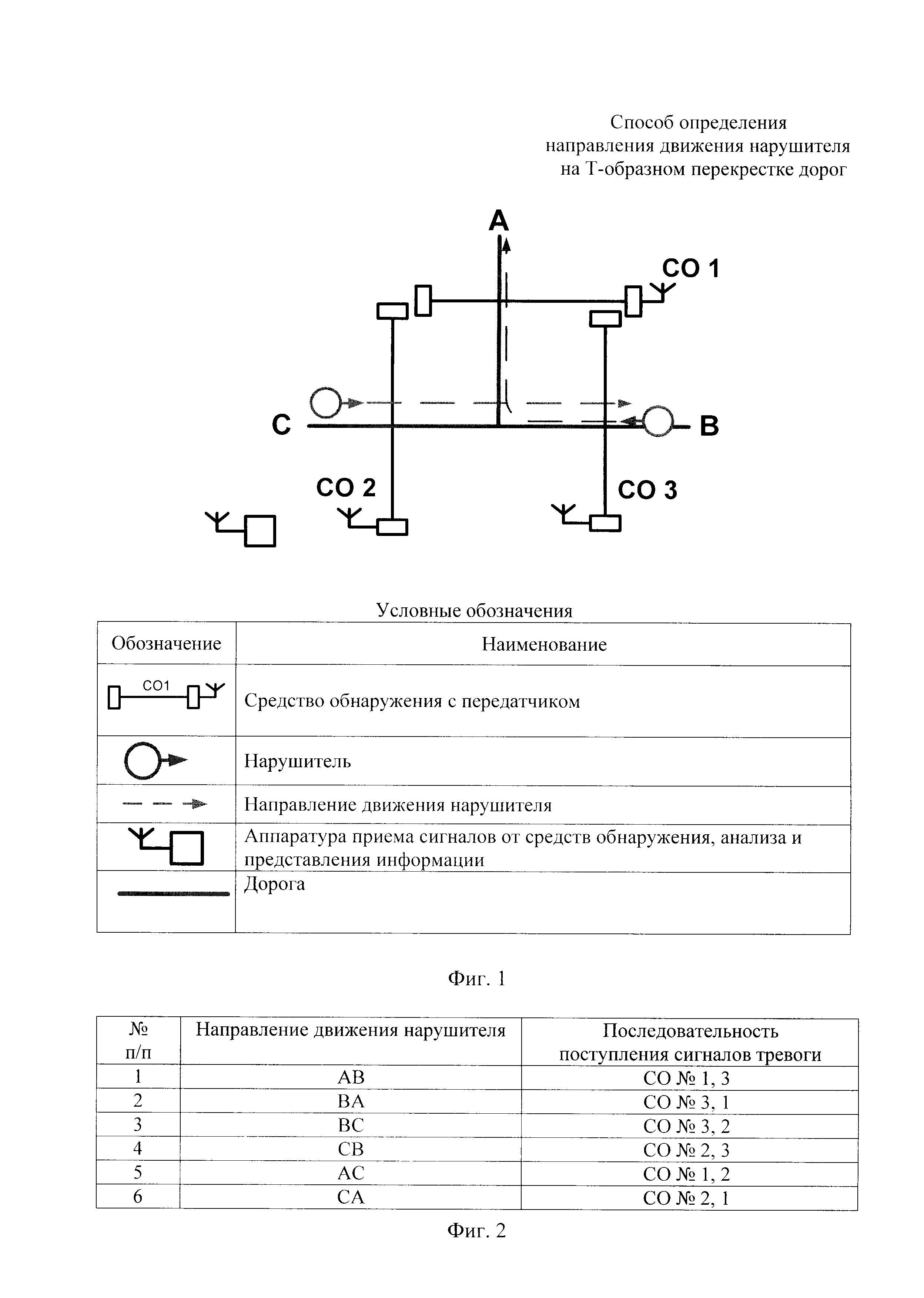
Так, известен способ определения направления движения нарушителя на Т-образном перекрестке с применением рассматриваемых СО, заключающийся в аналитическом выводе о направлении движения нарушителя по очередности и номерам СО, выдавших сигналы тревоги (фиг. 1, 2) [1]. Недостатком этого способа является необходимость развертывания трех СО на перекрестке, по одному на каждой из дорог.
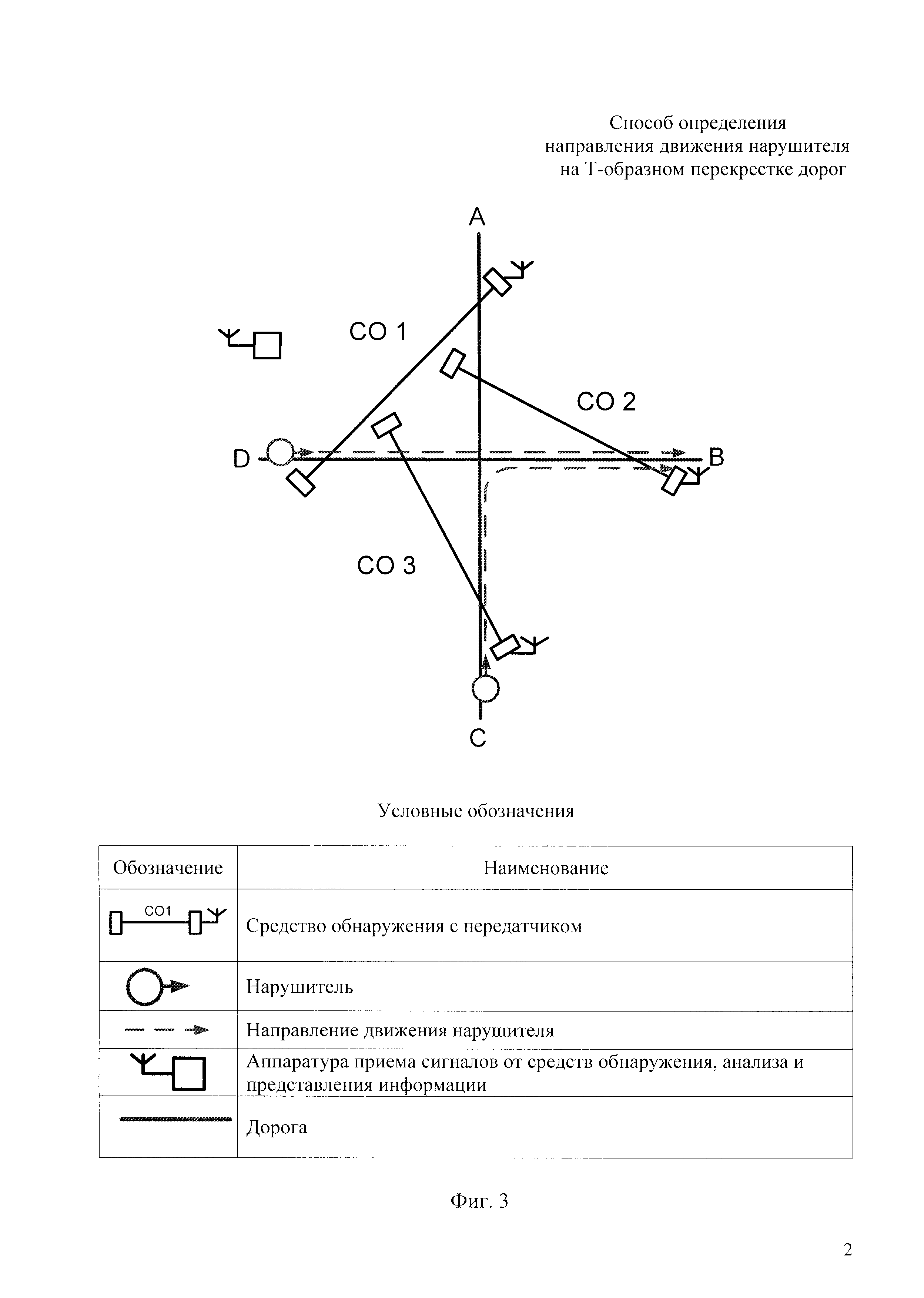
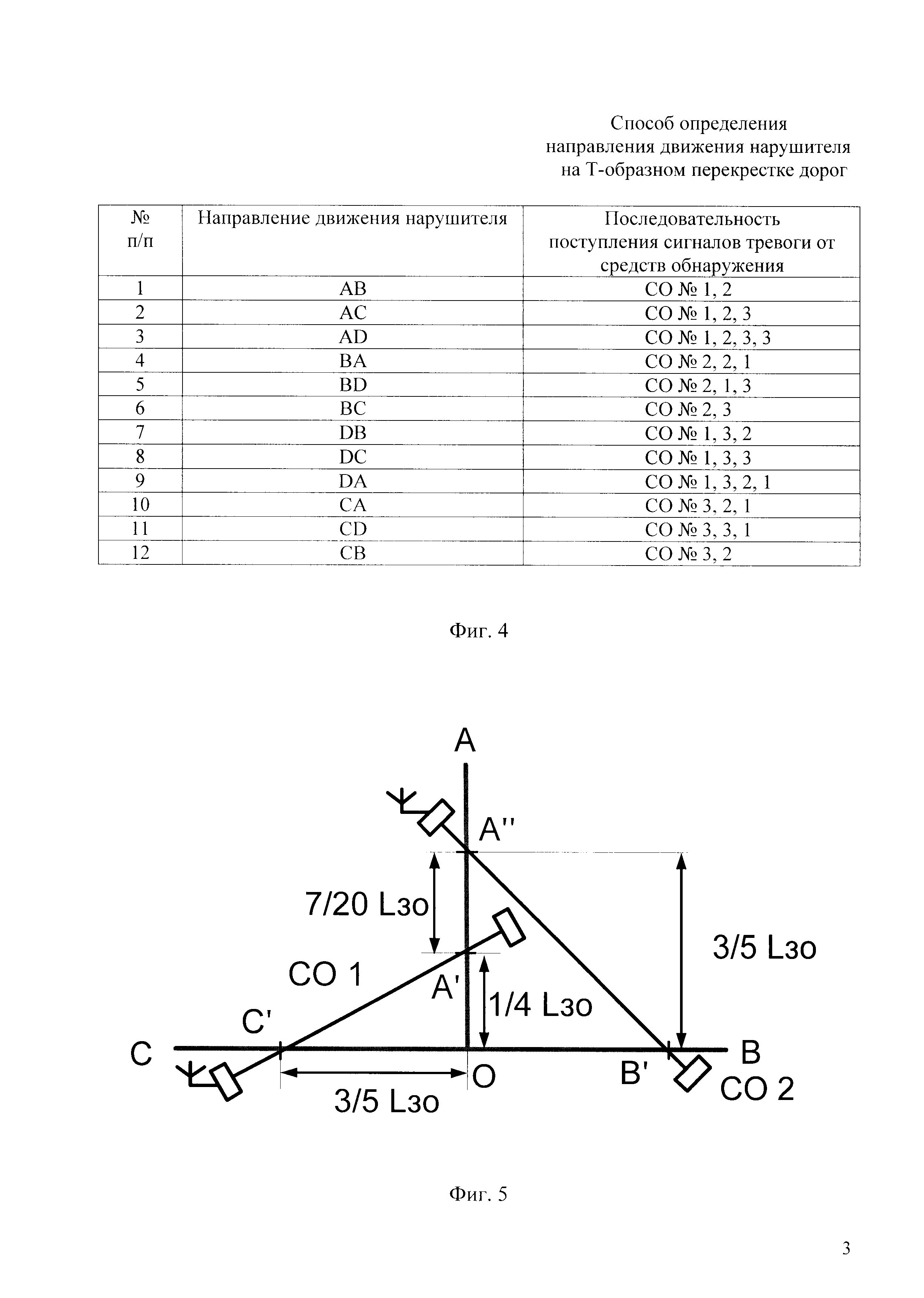
Прототипом предлагаемого способа является способ определения направления движения нарушителя на перекрестке дорог [2]. Способ заключается в развертывании на четырехстороннем перекрестке трех СО с протяженной зоной обнаружения таким образом, чтобы каждое из них прикрывало сразу две дороги, применении алгоритма, определяющего направление движения по последовательности из двух, трех или четырех сигналов тревоги, поступивших за установленный интервал времени. Средства обнаружения разворачиваются на перекрестке таким образом, чтобы расстояния SN, проходимые нарушителем через перекресток в заданном направлении от первой до последней протяженной зоны обнаружения, были одинаковы для всех направлений. Регистрация обеспечивается аппаратурой приема сигналов, анализа и представления информации первого сигнала тревоги от средства обнаружения при появлении нарушителя на перекрестке. Также обеспечивается регистрация начала отсчета интервала времени Δt, регистрация последующих сигналов тревоги от соответствующих средств обнаружения с продолжением отсчета интервала времени Δt, а по таблице соответствия направлений движения нарушителя и последовательности сигналов тревоги определяется направление движения нарушителя (фиг. 3, 4).
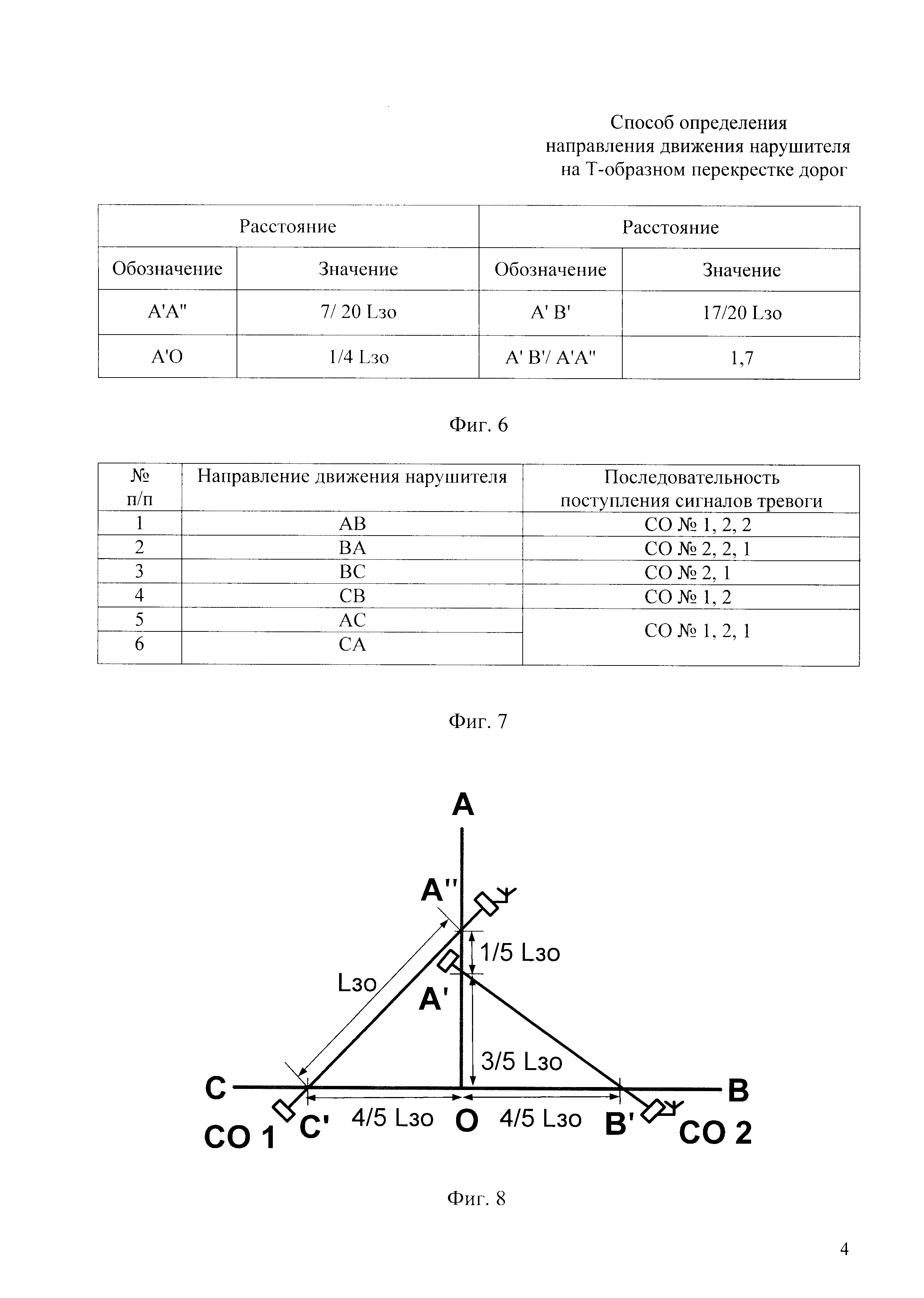
Применение известного способа для сигнализационного прикрытия таких перекрестков имеет недостаток - большое число применяемых СО (три). Так как простое исключение из схемы развертывания одного СО с учетом только трех дорог не позволяет однозначно определить все шесть направлений, два направления определяются попарно (фиг. 5, 6, 7).
Целью изобретения является снижение числа средств обнаружения для сигнализационного прикрытия Т-образного перекрестка дорог до двух с сохранением возможности определения направления движения нарушителя через перекресток.
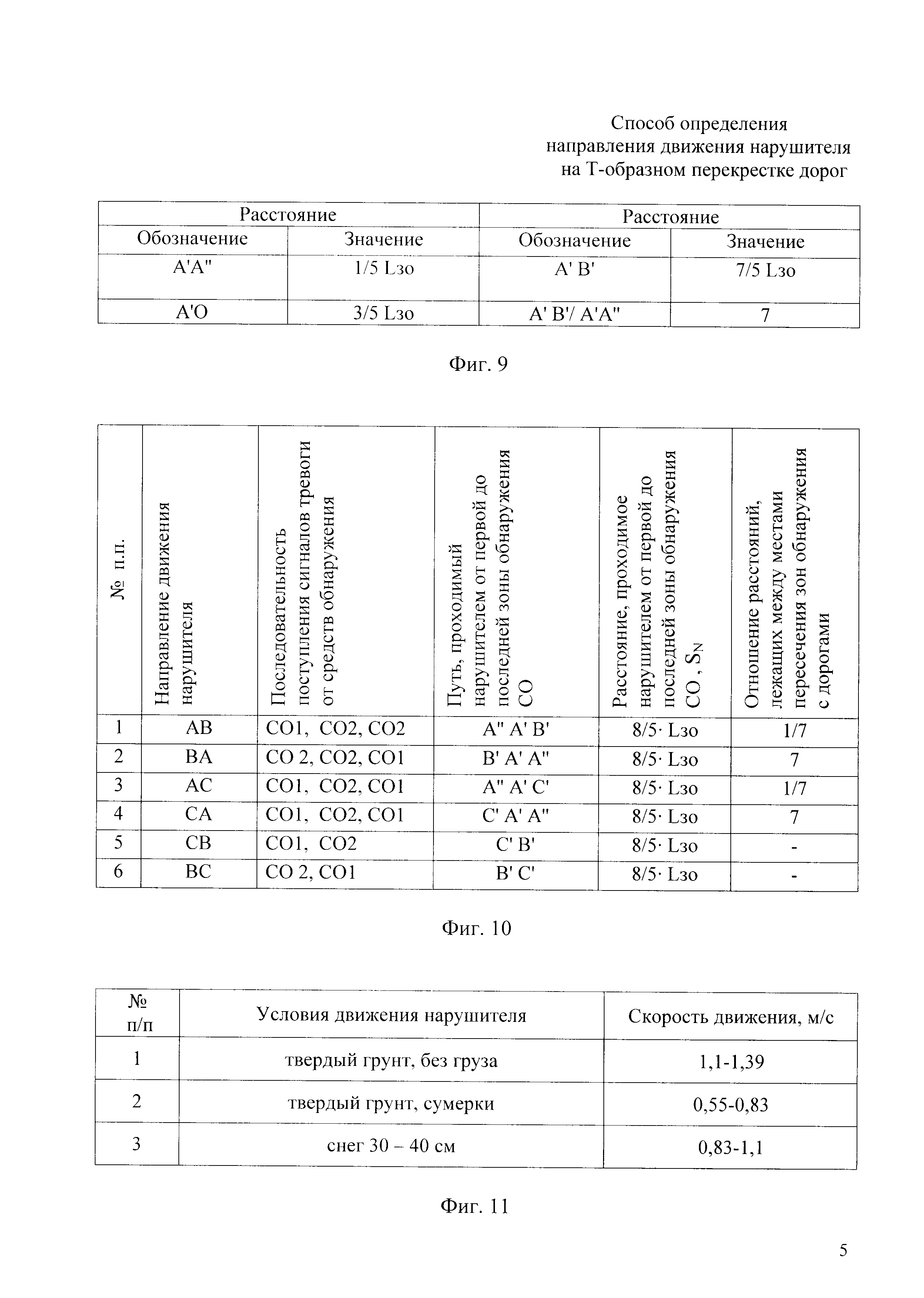
Для достижения поставленной цели разработан способ определения направления движения нарушителя на Т-образном перекрестке дорог, заключающийся в развертывании на трехстороннем перекрестке дорог двух СО таким образом, чтобы ПЗО каждого СО прикрывало сразу две дороги, короткое и длинное расстояния между рядом лежащими местами пересечения зон обнаружения с дорогами соотносились как 1:7 и последующем алгоритмическом выводе о направлении движения нарушителя по очередности и номерам сработавших СО в последовательность из двух сигналов тревоги или последовательности из трех сигналов тревоги и отношению между временными интервалами задержки их поступления, поступивших за установленный интервал времени (фиг. 8-10).
Схема развертывания СО составляется таким образом, чтобы ПЗО каждого средства пересекало две дороги, расстояния, проходимые нарушителем в любом из направлений движения через перекресток от первой до последней ПЗО, были равны, и короткое и длинное расстояния между рядом лежащими местами пересечения зон обнаружения с дорогами соотносились как 1:7 (фиг. 8, 9).
На трехстороннем перекрестке движение нарушителя через него возможно в шести направлениях. В зависимости от выбранного направления нарушитель пересекает ПЗО от двух до трех раз, то есть возможно поступление от двух до трех сигналов тревоги от СО. В ряде последовательностей первые по счету номера СО, выдавшие сигнал тревоги, совпадают (фиг. 10), поэтому окончательный вывод о направлениях движения, при которых нарушитель пересекает ПЗО, при поступлении сигналов тревог от двух СО возможен не ранее окончания принимаемого за расчетный интервал времени (ΔТ). Этот интервал определяется максимально возможным временем, за которое нарушитель пересечет все ПЗО при движении в заданном направлении. Он зависит от минимальной скорости движения нарушителя и расстояния, проходимого им от первой ПЗО до последней (фиг. 9, 11):

где ΔtNmax - максимально возможное время движения нарушителя через перекресток в заданном направлении от первой до последней ПЗО, с;
SN - расстояние, проходимое нарушителем через перекресток в заданном направлении от первой до последней ПЗО, м;
Vmin - нижний предел скорости нарушителя на перекрестке, м/с.
С учетом разработанной схемы развертывания СО на перекрестке эти расстояния SN одинаковы для всех направлений и равны, поэтому (фиг. 10):

где S - расстояние, проходимое нарушителем через перекресток в заданном направлении от первой до последней ПЗО и принимаемое для всех направлений, м;
LЗО - длина ПЗО применяемого СО, м.
Таким образом, максимально возможное время движения нарушителя через перекресток от первой до последней ПЗО:

где Δtmax - максимально возможное время движения нарушителя через перекресток от первой до последней ПЗО, принимаемое для всех направлений, с;
Нижние пределы скоростей нарушителя зависят от конкретных условий местности, определены практически, известны и подтверждены на основе статистических исследований (фиг. 11). [3-5]
Для надежности результата вывода принимаемый за расчетный интервал времени, за который нарушитель пройдет перекресток в заданном направлении от первой до последней ПЗО, берется с коэффициентом 1,2:

где ΔТ - принимаемый за расчетный интервал времени, за который нарушитель пройдет перекресток в заданном направлении от первой до последней ПЗО, с.
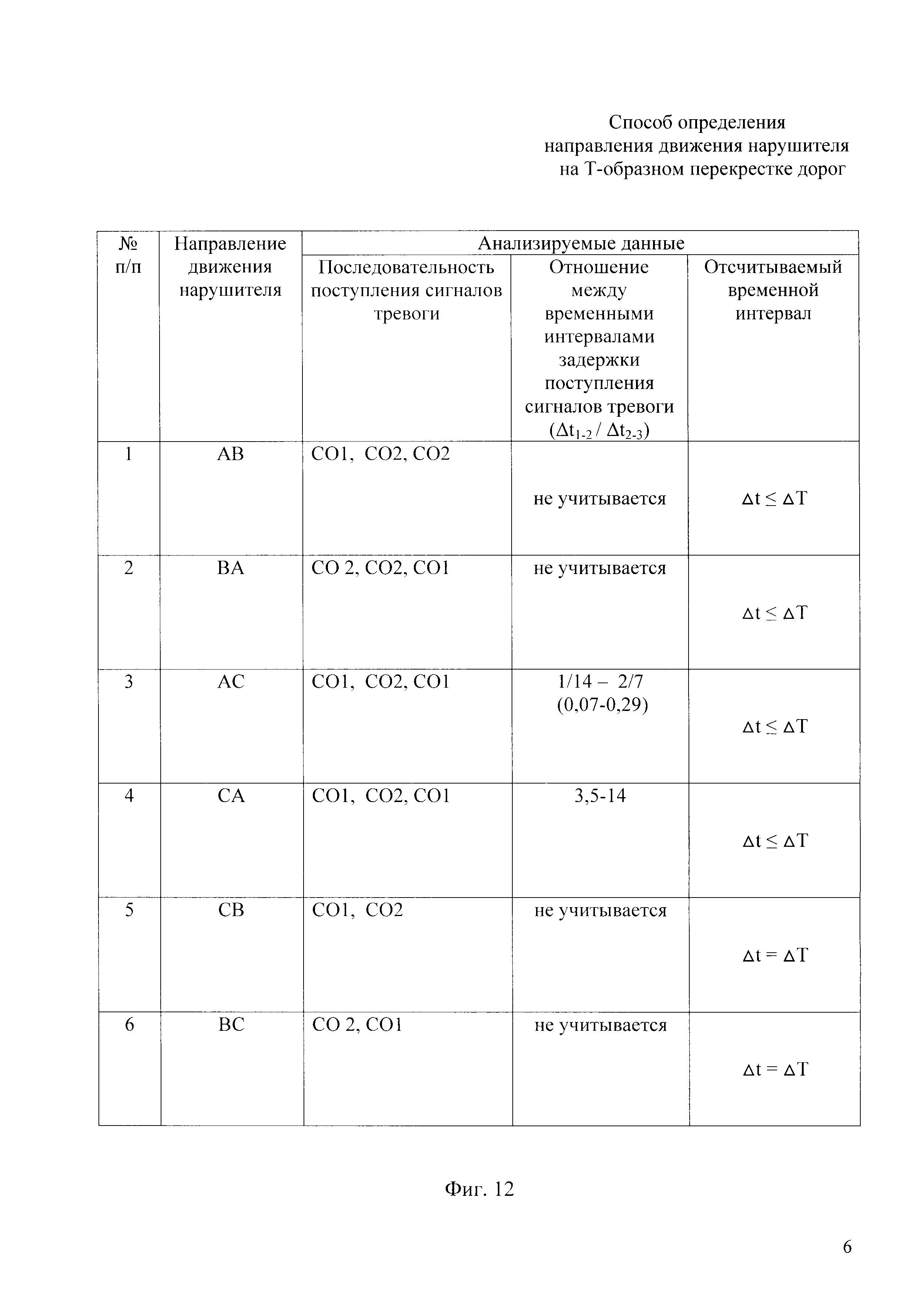
Для направлений движения АС и СА последовательность номеров СО, выдавших сигнал тревоги, совпадает полностью (фиг. 10). Поэтому эти направления движения различают между собой по отношению между временными интервалами задержки поступления сигналов тревоги. Так при движении нарушителя в направлении АС отношение временного интервала задержки между поступлением первого и второго сигналов больше временного интервала задержки между поступлением второго и третьего сигналов. Для направления СА характерно противоположное отношение (фиг. 10). Такая зависимость определяется отношением между расстояниями, лежащими между местами пересечения ПЗО с дорогами (фиг. 8, 10):

где А"А', А'С' - короткое и длинное расстояния между рядом лежащими местами пересечения протяженных зон обнаружения средств обнаружения с дорогой соответственно, м.
Пеший нарушитель движется со скоростью, пределы которой зависят от условий местности (фиг.11). При этом отношение верхнего значения скорости (Vmax) к нижнему (Vmin) лежит в пределах 1,5...2,0 [3-4]:

С учетом формул (5) и (6) отношение временного интервала задержки между поступлением сигналов тревоги при движении нарушителя от точки А" к точке А' (Δt А"А') ко временному интервалу задержки между поступлением сигналов при движении нарушителя от точки А' к точке С' (Δt А'С') лежит в пределах (фиг. 12):

Таким образом, решение о направлении движения нарушителя принимается на основе анализа очередности и номеров сработавших СО в последовательность из двух или трех сигналов тревоги, поступивших за установленный интервал времени, и отношению между временными интервалами задержки поступления этих сигналов тревоги (фиг. 12).
Сущность изобретения поясняется графическими материалами, где на:
- фиг. 1 представлена схема развертывания средств обнаружения в известном способе определения направления движения нарушителя на Т-образном перекрестке дорог;
- фиг. 2 - таблица принятия решения о направлении движения нарушителя на перекрестке дорог для известного способа;
- фиг. 3 - схема развертывания средств обнаружения в известном способе определения направления движения нарушителя на перекрестке дорог;
- фиг. 4 - таблица принятия решения о направлении движения нарушителя на перекрестке дорог для известного способа;
- фиг. 5 - схема развертывания средств обнаружения на Т-образном перекрестке дорог с применением известного способа определения направления движения нарушителя, при котором исключено одного средство;
- фиг. 6 - таблица геометрических размеров для схемы развертывания средств обнаружения, при котором исключено одного средство;
- фиг. 7 - таблица принятия решения о направлении движения нарушителя на перекрестке дорог при простом исключении одного средства обнаружения в известном способе;
- фиг. 8 - схема развертывания средств обнаружения в предлагаемом способе;
- фиг. 9 - таблица геометрических размеров для схемы развертывания средств обнаружения в предлагаемом способе;
- фиг. 10 - таблица соответствия направлений движения нарушителя через перекресток последовательности поступающих сигналов тревоги при этом и проходимым им расстояниям между зонами обнаружения;
- фиг. 11 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг. 12 - таблица принятия решения о направлении движения нарушителя на трехстороннем перекрестке дорог;
- фиг. 13 - структурная схема взаимосвязи применяемых устройств при реализации способа.
При реализации способа применяются следующие устройства: средство 1 обнаружения с передатчиком №1, устройство 2 управления таймером 3, средство 4 обнаружения с передатчиком №2, приемник 5 сигналов, решающее устройство 6, средство 7 обнаружения с передатчиком №3 и монитор 8 (фиг. 15).
Способ включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Развертывание средств обнаружения с передатчиками №1 и №3 с учетом рекомендуемых расстояний от центра перекрестка до точки пересечения оси ПЗО СО (фиг. 8, 9).
2. Развертывание на местности аппаратуры приема сигналов, анализа и представления информации, включающей в себя: устройство 2 управления таймером 3, таймер 3, средство 4 обнаружения с передатчиком, приемник 5 сигналов, решающее устройство 6, монитор 8 (фиг. 13).
3. Определение расчетного интервала времени ΔT (формулы (3), (4).
4. Составление таблицы принятия решения о направлении движения нарушителя на четырехстороннем перекрестке и загрузку ее в решающее устройство 6 (фиг. 12).
Основной этап начинается при движении нарушителя через перекресток дорог и включает:
1. Регистрацию приемником 5 первого сигнала тревоги от одного из средств 1, 4 или 7 обнаружения с передатчиком при пересечении нарушителем его ПЗО, запуск таймера 3 устройством 2 управления таймером, начало отсчета им интервала времени Δt и записью номера средства обнаружения в решающее устройство 6 (фиг. 13).
2. Продолжение отсчета интервала времени Δt таймером 3 и регистрацию приемником 5 последующих сигналов тревоги от средств обнаружения при пересечении нарушителем их ПЗО, записью их в решающее устройство 6 (фиг. 13).
3. Сравнение решающим устройством 6 поступающей последовательности сигналов с имеющимися последовательностями сигналов в таблице принятия решения о направлении движения нарушителя на перекрестке дорог (фиг. 12).
4. Окончание отсчета интервала времени Δt таймером 3 и регистрацию приемником 5 сигналов тревоги от средств обнаружения по команде решающего устройства 6 при условии совпадения полученной последовательности сигналов с имеющимися последовательностями сигналов и соответствия отсчитанного интервала времени Δt согласно таблице принятия решения о направлении движения нарушителя на перекрестке дорог (фиг. 12).
5. Выведение результата на монитор 8 (фиг. 13).
Технический результат состоит в снижении количества СО, необходимого для сигнализационного прикрытия Т-образного перекрестка дорог до двух с сохранением возможности определения направления движения нарушителя через перекресток.
Источники информации
1. Магауенов, Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов. - М.: Горячая - Телеком, 2004. - 367 с.
2. Пат. 2523068 Российская Федерация, МПК51 G08В 23/00. Способ определения направления движения нарушителя на перекрестке дорог / С.А. Удот. - №2012145074/08; заявл. 22.10.12; опубл. 20.07.14, Бюл. №20.
3. Псарев, А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
4. Баленко, С.В. Школа выживания. - М.: 1994. - 140 с.
Способ определения направления движения нарушителя на Т-образном перекрестке дорог, заключающийся в развертывании на Т-образном перекрестке дорог средств обнаружения с протяженной зоной обнаружения таким образом, чтобы каждое из них прикрывало сразу две дороги и расстояния, проходимые нарушителем через перекресток в заданном направлении от первой до последней протяженной зоны обнаружения, были одинаковы для всех направлений, в обеспечении регистрации аппаратурой приема сигналов, анализа и представления информации первого сигнала тревоги от средства обнаружения при появлении нарушителя на перекрестке, а также начала отсчета интервала времени Δt; обеспечении регистрации последующих сигналов тревоги от соответствующих средств обнаружения с продолжением отсчета интервала времени Δt; применении алгоритма, определяющего направление движения по последовательности сигналов тревоги, поступивших за установленный интервал времени согласно таблице соответствия направления движения нарушителя и последовательности сигналов тревоги, отличающийся тем, что применяются только два средства обнаружения, короткое и длинное расстояния между рядом лежащими местами пересечения зон обнаружения с дорогами соотносятся как 1:7 и в алгоритме определения направления движения нарушителя анализируются последовательности из двух сигналов тревоги или последовательности из трех сигналов тревоги и отношение между временными интервалами задержки их поступления.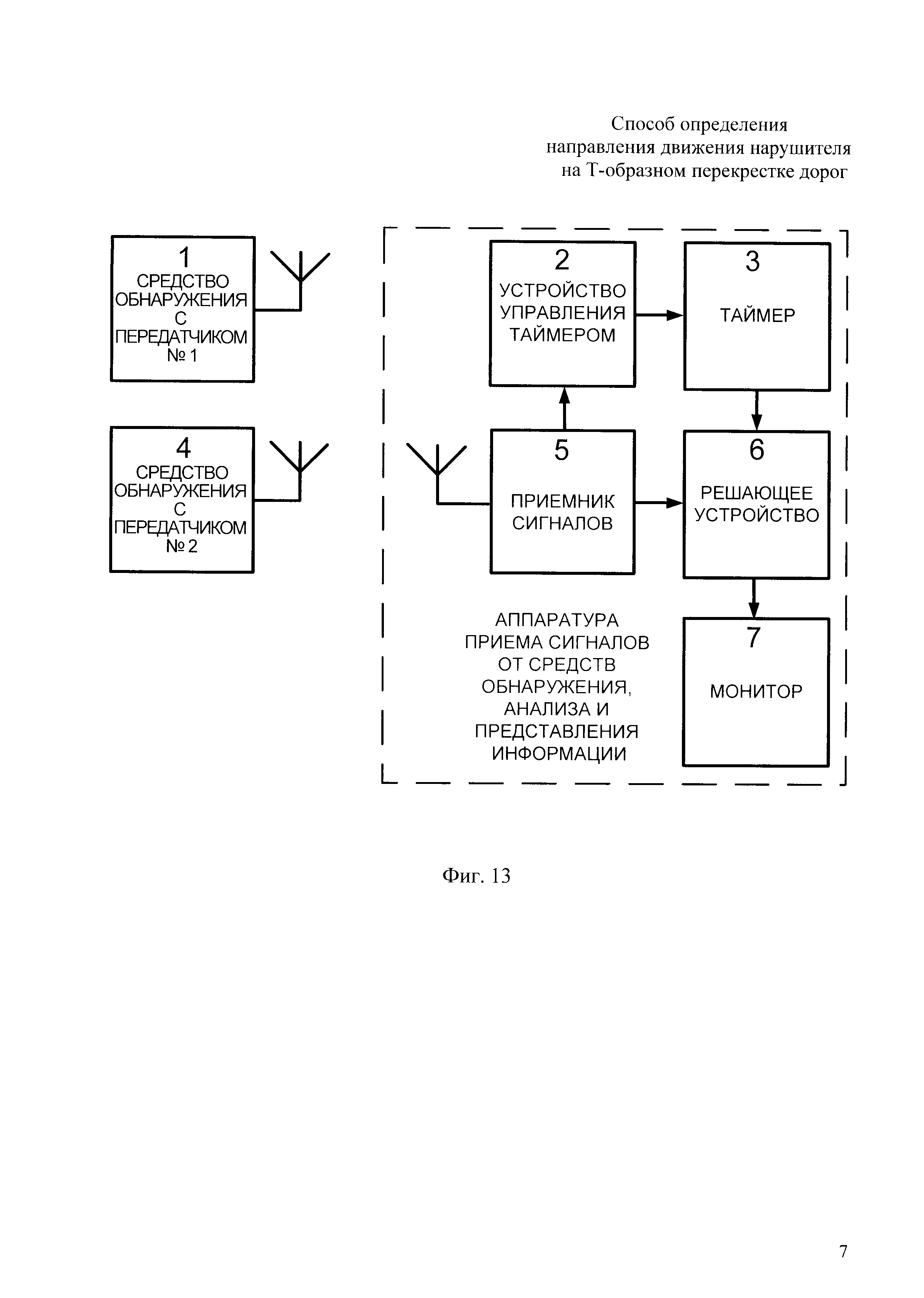
Способ охранного мониторинга участка дороги
Способ охранного мониторинга с применением линейного радиоволнового средства обнаружения
Способ охранного мониторинга
Способ охранного мониторинга тропы с применением пассивного оптико-электронного средства обнаружения
Способ охранного мониторинга участка местности обрывным рефлектометрическим средством обнаружения
Способ охранного мониторинга с применением оптико-электронного средства обнаружения инфракрасного диапазона
Способ обнаружения нарушителя линейным радиоволновым средством обнаружения и распознавания его способа передвижения
Способ обнаружения и распознавания объекта на местности
Способ обнаружения и распознавания объекта
Способ охранного мониторинга дороги линейным радиоволновым средством обнаружения
Способ охранного мониторинга с применением пассивного оптико-электронного средства обнаружения инфракрасного диапазона
Способ охранного мониторинга пересечения дорог линейным радиоволновым средством обнаружения

