Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ БОЕВЫМИ СРЕДСТВАМИ
Вид РИД
Изобретение
Изобретение относится к области автоматизированных систем управления вооруженными силами.
Наиболее близким к заявленному техническому решению является способ децентрализованного управления процессом распределенного моделирования и обработки данных (патент РФ №2365977, МПК8 G06F 11/20, G06F 15/16, опубл. 27.08.2009), в котором вводят информацию в модуль организации вычислений, распределенно обрабатывают ее в модулях обработки данных, причем количество модулей обработки данных является произвольным, кроме того, передают обработанную информацию в модуль организации вычислений, который формирует результат обработки информации на основе обработанной информации и отображает сформированный результат на экраны пользователей.
Недостатком данного способа являются низкие значения показателей оперативности и непрерывности управления модулями организации вычислений в случаях недостаточной пропускной способности каналов связи между модулем организации вычислений и модулями обработки данных.
При распределенной системе управления сетью операционных пунктов, осуществляющих управление подчиненными им боевыми средствами, возникают ситуации, приводящие к недостаточной пропускной способности каналов связи между взаимодействующими операционными пунктами. Это приводит к тому, что операционные пункты обладают в основном информацией от подчиненных им боевых средств и неполной информацией от других операционных пунктов и их подчиненных боевых средств. В результате управление боевыми средствами происходит в условиях неполной информации. При этом распределенная система управления предполагает автоматизированное согласованное принятие решений операционными пунктами, но недостаточная пропускная способность каналов связи между операционными пунктами затрудняет согласованное принятие решений. Таким образом, возникает задача создания способа автоматизированного управления боевыми средствами, обеспечивающего оперативность и непрерывность управления в условиях недостаточной пропускной способности каналов связи между операционными пунктами.
Технический результат при осуществлении изобретения - обеспечение оперативности и непрерывности управления боевыми средствами при распределенной системе управления операционными пунктами в условиях недостаточной пропускной способности каналов связи между ними.
Технический результат достигается за счет того, что в предлагаемом способе операционные пункты подключают с помощью каналов связи к подчиненным боевым средствам и взаимодействующим операционным пунктам, операционные пункты, не связанные прямыми каналами связи, подключают через промежуточные операционные пункты, выполняющие функцию ретрансляторов информации, каждый операционный пункт с введенными перечнями режимов работ и задач, а также правилами ранжирования информации по важности ранжирует обрабатываемую информацию, принимает по каналам связи от подчиненных боевых средств данные об их режимах работы, затем операционные пункты по каналам связи производят рассылку информации в соответствии с присвоенными рангами, а также принимают данные от остальных операционных пунктов об их целевых режимах работы и целевых режимах работы подчиненных им боевых средств, после этого каждый операционный пункт запускает процедуру вычисления целевых режимов работы всех операционных пунктов и боевых средств, обеспечивающих максимальный целевой результат функционирования всей системы, в том числе вычисляет время, отведенное на реализацию данных целевых режимов работы, а также выделяет два типа целевых режимов работы операционных пунктов и боевых средств по принципу: первый - тип целевых режимов работы, не требующих согласования с остальными операционными пунктами, и их операционный пункт выполняет в соответствии с рассчитанным временем на реализацию, второй - тип режимов, требующих согласования с остальными операционными пунктами, для этого операционные пункты по каналам связи рассылают данные по второму типу целевых режимов работы всем остальным операционным пунктам совместно с информацией, поясняющей вычисленные целевые режимы работы, при этом каждый операционный пункт вычисляет резервный вариант целевых режимов работы второго типа для подчиненных боевых средств на случай невозможности согласования соответствующих целевых режимов второго типа, затем каждый операционный пункт повторно запускает процедуру расчета целевых режимов работы второго типа операционных пунктов и боевых средств с учетом вновь поступившей по каналам связи информации, в результате вычислений операционные пункты либо принимают к исполнению полученные целевые режимы работы второго типа, либо формируют другой вариант целевых режимов, при этом данные по вновь рассчитанным целевым режимам работы второго типа рассылают по каналам связи всем остальным операционным пунктам и операционные пункты продолжают процесс вычисления, рассылки по каналам связи данных по второму типу целевых режимов работы и согласования второго типа целевых режимов работы операционных пунктов и боевых средств до тех пор, пока не будет достигнуто согласие между операционными пунктами или не истечет время, отведенное на реализацию целевых режимов работы второго типа, при этом в случае согласия между операционными пунктами операционные пункты приступают к реализации согласованных целевых режимов работы второго типа, а в случае истечения времени на реализацию целевых режимов работы второго типа и если не проведено ни одной итерации согласования, операционные пункты реализуют резервный вариант соответствующего целевого режима работы второго типа, или, если получены частично согласованные целевые режимы работы второго типа, операционные пункты оценивают целевые режимы работы, полученные по каналам связи на предыдущих итерациях согласования и реализуют те, которые обеспечивают наибольший целевой результат функционирования системы, затем операционные пункты контролируют свои режимы работы и режимы работы подчиненных боевых средств, а также поступление по каналам связи измененных данных о режимах работы от всех остальных операционных пунктов, при этом в случае приема измененных данных или в случае изменения режимов работы подчиненных боевых средств операционные пункты возобновляют последовательное выполнение операций: рассылают по каналам связи в соответствии с присвоенными в операционных пунктах рангами информацию всем остальным операционным пунктам; принимают по каналам связи информацию от остальных операционных пунктов; вычисляют целевые режимы работы соответствующих операционных пунктов и боевых средств с учетом влияния вновь поступившей по каналам связи информации; вычисляют время, отведенное на реализацию данных режимов работы; выделяют два типа целевых режимов работы операционных пунктов и боевых средств, в том числе вычисляют резервные варианты целевых режимов работы второго типа; выполняют в соответствии с рассчитанным временем на реализацию целевые режимы работы первого типа, а также рассылают по каналам связи данные по второму типу целевых режимов работы всем остальным операционным пунктам; вычисления, рассылки и согласования целевых режимов работы второго типа продолжают до тех пор, пока не будет достигнуто согласие между операционными пунктами или не истечет время, отведенное на реализацию целевых режимов работы второго типа; реализуют целевые режимы работы второго типа, контролируют свои режимы работы и режимы работы подчиненных боевых средств, а также поступление по каналам связи измененных данных о режимах работы от всех остальных операционных пунктов.
Изобретение поясняется фигурой (см. фиг. 1), на которой представлена сеть операционных пунктов (ОП) и боевых средств (БС), соединенных каналами связи.
Способ осуществляется следующим образом.
В качестве БС понимают радиолокационные станции, гидроакустические станции, электромагнитные станции, станции радиотехнической, оптоэлектронной, телевизионной разведки и подавления, ракетные и артиллерийские комплексы, корабли, летательные аппараты и т.п.
Под режимами работы БС и режимами работы ОП понимают, в частности, следующие параметры:
- координаты ОП и БС;
- энергетика излучения радиолокационных станций (РЛС), средств радиоэлектронного подавления (РЭП);
- диаграмма направленности РЛС и средств РЭП;
- диапазон частот излучения РЛС и средств РЭП;
- информация о назначенных целях для воздействия средствами оружия, средствами РЭП, оптико-электронного противодействия (ОЭП), инфракрасного противодействия (ИП);
- тип оружия БС;
- радиоданные средств связи;
- наличие и состав боекомплекта БС;
- информация о наличии и техническом состоянии БС, подчиненных конкретному ОП;
- информация о наличии, состоянии и пропускной способности каналов между конкретными ОП и БС.
ОП соединены с помощью каналов связи с подчиненными БС и с взаимодействующими ОП. При этом ОП, не связанные прямыми каналами, соединяют через промежуточные ОП, являющиеся ретрансляторами информации. Например, для обеспечения взаимодействия ОП 1 и ОП 6 ретранслятором информации может быть ОП 3 (см. фиг. 1).
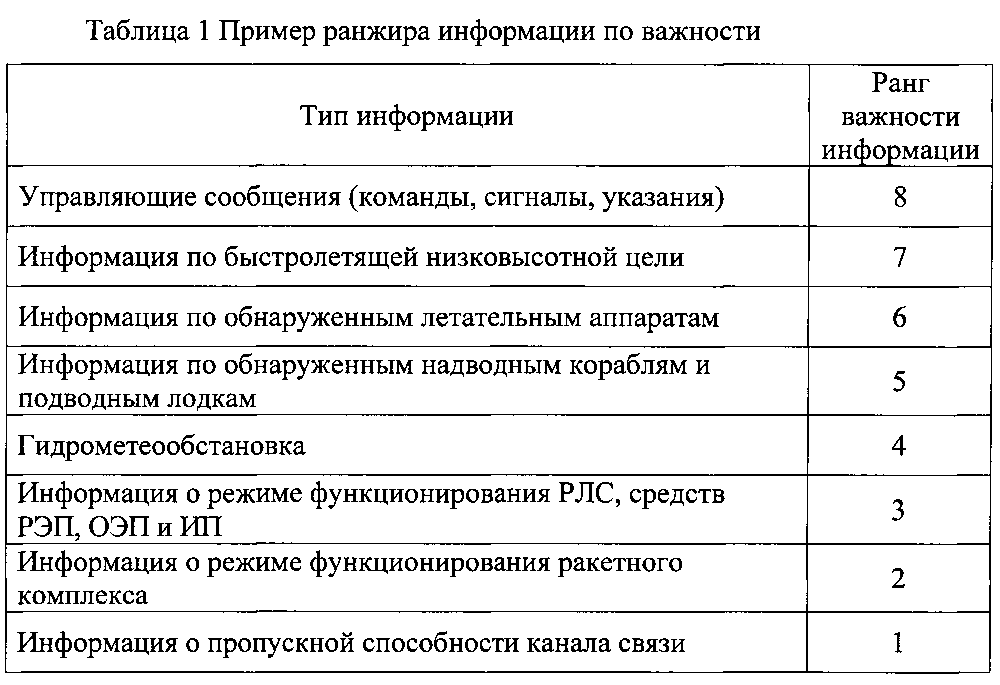
В каждый ОП вводят перечень режимов работ и задач, а также правила ранжирования информации по важности, в соответствии с которыми ранжируют обрабатываемую информацию. В результате чего получают массив пар <тип информации, ранг ее важности>. Пример ранжира информации по важности приведен в таблице 1.
ОП принимают по каналам связи информацию от подчиненных БС об их режимах работы, в том числе информацию по обстановке (космической, воздушной, надводной, подводной, наземной, ледовой, гидрометеорологической и т.п.).
ОП по каналам связи рассылают и принимают от остальных ОП информацию в соответствии с присвоенными рангами. К примеру, управляющие сообщения рассылают в первую очередь.
Каждый ОП запускает процедуру вычисления целевых режимов работы всех ОП и БС, обеспечивающих максимальный целевой результат функционирования всей системы, в том числе вычисляет время, отведенное на реализацию данных целевых режимов работы.
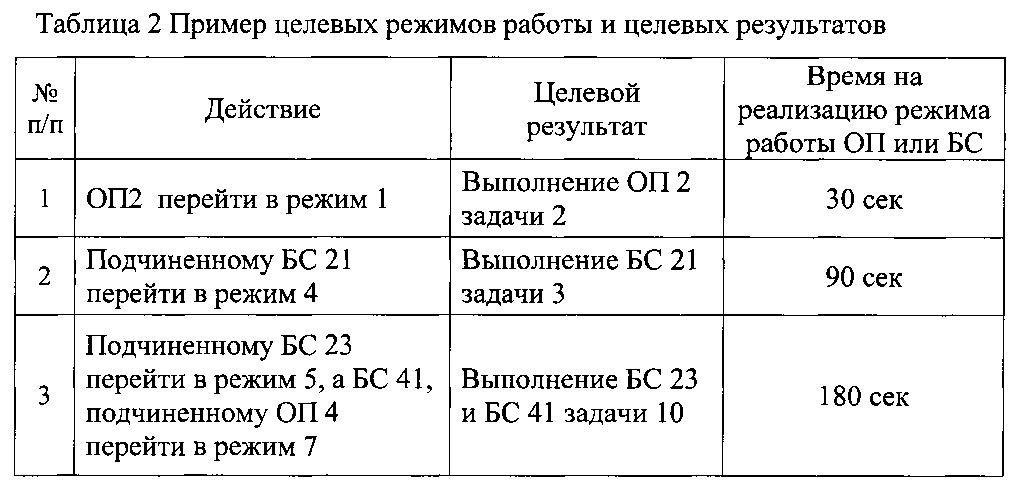
Пример вычисленных целевых режимов работы и целевых результатов, полученных на ОП2, приведен в таблице 2 (см. фиг. 1).
В результате выполнения процедуры расчета целевых режимов работы ОП и БС выделяют два типа целевых режимов работы операционных пунктов и боевых средств по принципу: первый - тип целевых режимов работы, не требующих согласования с остальными ОП, и второй - тип режимов, требующих согласования с ОП.
Первый тип выполняют в соответствии с рассчитанным временем на реализацию. Второй тип - целевые режимы ОП и БС, которые необходимо согласовывать с остальными операционными пунктами. Примером второго типа целевого режима может являться совместное использование БС, подчиненных разным ОП, например БС 23 и БС 41 (см. фиг. 1).
Кроме того, каждый ОП вычисляет резервный вариант целевых режимов работы второго типа для подчиненных БС на случай, когда согласование соответствующих целевых режимов работы второго типа по каким-либо причинам провести невозможно. При этом резервные варианты целевых режимов работы второго типа подразумевают решение задач, назначенных для БС взаимодействующих ОП, посредством только подчиненных БС. Реализация такого целевого режима работы обеспечивает оперативность и непрерывность управления даже при срыве согласования целевых режимов работы второго типа между взаимодействующими ОП.
ОП по каналам связи рассылают данные по второму типу целевых режимов работы всем остальным ОП совместно с информацией, поясняющей вычисленные целевые режимы работы. Информация, поясняющая вычисленные режимы работы, необходима для принятия согласованного решения взаимодействующими ОП. К примеру, для целевого режима второго типа по совместному использованию БС, подчиненных разным ОП, поясняющей информацией может являться информация о техническом состоянии БС, их радиоданные и др.
Каждый ОП рассылает по каналам связи информацию о вычисленных целевых режимах работы ОП и БС всем взаимодействующим ОП, принимает по каналам связи информацию от взаимодействующих ОП о вычисленных целевых режимах работы ОП и БС. После этого каждый ОП повторно запускает процедуру расчета целевых режимов работы второго типа ОП и БС с учетом вновь поступившей информации. В результате вычислений каждый ОП либо подтверждает необходимость использования ранее полученных целевых режимов работы второго типа, либо формирует другой вариант целевых режимов работы ОП и БС. При этом данные по вновь рассчитанным целевым режимам работы второго типа рассылают по каналам связи взаимодействующим ОП.
Повторяющиеся итерации вычисления, рассылки по каналам связи и согласования целевых режимов работы ОП и БС представляют собой диалог, в ходе которого ОП согласованно формируют совместные решения по управлению ОП и БС.
Предложенная последовательность действий продолжается до наступления одного из следующих событий:
- целевые режимы работы второго типа полностью согласованы с соответствующими ОП. В этом случае каждый ОП приступает к реализации полученных режимов работы;
- истекло время, отведенное на реализацию и согласование целевых режимов работы второго типа. В этом случае, если ранее проведены итерации согласования соответствующих целевых режимов работы ОП и БС, ОП, ожидающие согласованного решения от взаимодействующих ОП по целевым режимам работы второго типа, оценивают и реализуют целевые режимы работы ОП и БС, которые обеспечивают наибольший целевой результат функционирования системы;
- истекло время, отведенное на реализацию и согласование целевых режимов работы второго типа, но по какой-либо причине, например из-за недостаточной пропускной способности каналов связи, не произошло ни одной итерации согласования между взаимодействующими ОП. В этом случае ОП, ожидающие согласованного решения от взаимодействующих ОП по целевым режимам работы второго типа, реализуют резервные варианты соответствующих целевых режимов работы.
При этом на каждом ОП непрерывно контролируют свои режимы работы, режимы работы подчиненных БС, а также поступление по каналам связи измененных данных от всех остальных ОП. В случае приема измененных данных от остальных ОП или в случае изменения режимов работы подчиненных БС возобновляют последовательное выполнение предыдущих операций рассылки измененных целевых режимов работы всем ОП, а также вычисления целевых режимов работы соответствующих ОП и БС с учетом влияния вновь поступившей информации.
Таким образом, предлагаемый способ автоматизированного управления боевыми средствами за счет ранжирования информации, передачи информации в соответствии с присвоенными рангами, выделения двух типов целевых режимов работы ОП и БС, оценивания целевых результатов, полученных на предыдущих итерациях согласования, реализации целевых режимов работы ОП и БС, которые обеспечивают наибольший целевой результат функционирования системы, или реализации резервных вариантов целевых режимов работы обеспечивает оперативность и непрерывность управления в условиях недостаточной пропускной способности каналов связи между взаимодействующими ОП.
Предлагаемый способ может быть реализован операционным пунктом в виде известного комплекса средств автоматизации системы управления боевыми средствами (патент РФ №2391619, МПК8 F41H 11/02, опубл. 10.06.2010).
Операционный пункт, как и известный комплекс средств автоматизации системы управления боевыми средствами, состоит из соединенных между собой управляющей подсистемы, содержащей средства сбора, обработки, хранения и выдачи данных, средства отображения информации и ввода данных с устройствами отображения информации, подсистемы приема и передачи данных и каналов связи. К каналам связи операционного пункта подключены взаимодействующие операционные пункты и подчиненные боевые средства. При этом подключение операционного пункта к взаимодействующим операционным пунктам, не связанных прямыми каналами, осуществляется через промежуточные операционные пункты, выполняющие функцию ретрансляторов информации.
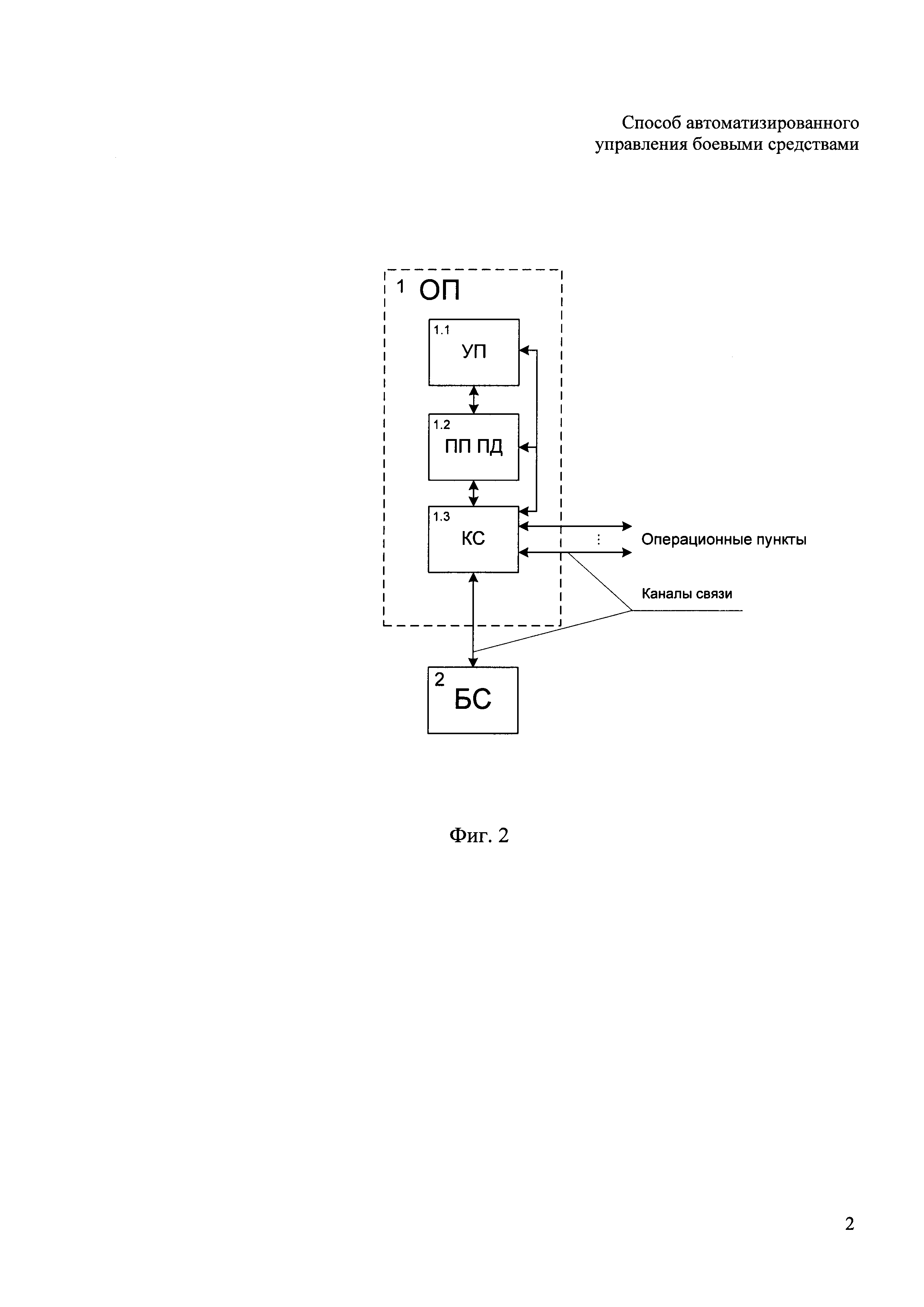
На фиг. 2 представлена структурная схема операционного пункта и связей между его элементами и боевыми средствами, где обозначены:
1 - операционный пункт (ОП);
1.1 - управляющая подсистема (УП);
1.2 - подсистема приема и передачи данных (ПП ПД);
1.3 - каналы связи (КС);
2 - боевые средства (БС).
Управляющая подсистема 1.1, подсистема приема и передачи данных 1.2, каналы связи 1.3 и боевые средства 2 могут быть реализованы так же, как реализованы аналогичные блоки в известном комплексе средств автоматизации системы управления боевыми средствами.
При этом средства сбора, хранения и выдачи данных, входящие в состав УП 1.1, могут быть реализованы, например, в виде известной системы управления базами данных (Д. Артемов. Microsoft SQL Server 2000: профессионалы для профессионалов. - М.: Русская редакция, 512 с.).
Средства обработки данных, средства отображения информации и ввода данных с устройствами отображения информации, входящие в состав УП 1.1, могут быть реализованы, например, в виде ПЭВМ (Фигурнов В.Э. IBM PC для пользователя. М.: Финансы и статистика, 1992, С. 17) с встроенными алгоритмами вычисления каждого типа режима работы. К примеру, для осуществления целераспределения возможно использование известного способа (патент РФ №2419140, МПК8 G06F 17/00, опубл. 20.05.2011), для вычисления координат радиолокационных средств - известного алгоритма (Моисеев А.И. Подход к решению задачи оптимального распределения средств наблюдения системы освещения обстановки / А.И. Моисеев // Морская радиоэлектроника - СПб.: Судостроение. - 2009. - №4. С. 64-66), для управления процессом передачи информации - известного способа маршрутизации (патент РФ №2431945, МПК8 H04W 40/00, опубл. 20.10.2011).
На фиг. 3 представлена структурная схема распределенной автоматизированной системы управления боевыми средствами, реализация которой предлагается с помощью сети операционных пунктов.
Каждый ОП 1 в составе распределенной системы работает следующим образом. На каждом ОП 1 в УП 1.1 вводят перечень режимов работ и задач, а также правила ранжирования информации по важности, в соответствии с которыми ранжируют обрабатываемую информацию. Затем по КС 1.3 принимают от подчиненных БС 2 данные об их режимах работы, рассылают в соответствии с присвоенными рангами информацию всем остальным ОП 1 и принимают информацию от остальных ОП 1. При этом обмен информацией с ОП 1, не связанных прямыми каналами, осуществляется через промежуточные ОП 1, выполняющие с помощью ПП ПД 1.2 функцию ретрансляторов информации. После этого в УП 1.1 вычисляют целевые режимы работы соответствующих ОП 1 и БС 2 с учетом влияния вновь поступившей информации, вычисляют время, отведенное на реализацию данных режимов работы, выделяют два типа целевых режимов работы ОП 1 и БС 2, вычисляют резервные варианты целевых режимов работы второго типа. После выполнения с помощью УП 1.1 целевых режимов работы первого типа (в соответствии с рассчитанным временем на их реализацию) по КС 1.3 рассылают второй тип целевых режимов работы всем остальным ОП 1. При этом вычисления, рассылки и согласования целевых режимов работы второго типа продолжают до тех пор, пока не будет достигнуто согласие между операционными пунктами или не истечет время, отведенное на реализацию целевых режимов работы второго типа. После этого с помощью УП 1.1 реализуют целевые режимы работы второго типа, контролируют свои режимы работы и режимы работы подчиненных БС 2, а также поступление измененных данных о режимах работы от всех остальных ОП 1.
Таким образом, с помощью описанного построения сети операционных пунктов возможна реализация предложенного способа автоматизированного управления боевыми средствами.
Способ автоматизированного управления боевыми средствами, при котором операционные пункты подключают с помощью каналов связи к подчиненным боевым средствам и взаимодействующим операционным пунктам, а операционные пункты, не связанные прямыми каналами связи, подключают через промежуточные операционные пункты, выполняющие функцию ретрансляторов информации, при этом количество операционных пунктов произвольное, отличающийся тем, что каждый операционный пункт с введенными перечнями режимов работ и задач, а также правилами ранжирования информации по важности ранжирует обрабатываемую информацию, принимает по каналам связи от подчиненных боевых средств данные об их режимах работы, затем операционные пункты по каналам связи производят рассылку информации в соответствии с присвоенными рангами, а также принимают данные от остальных операционных пунктов об их целевых режимах работы и целевых режимах работы подчиненных им боевых средств, после этого каждый операционный пункт запускает процедуру вычисления целевых режимов работы всех операционных пунктов и боевых средств, обеспечивающих максимальный целевой результат функционирования всей системы, в том числе вычисляет время, отведенное на реализацию данных целевых режимов работы, а также выделяет два типа целевых режимов работы операционных пунктов и боевых средств по принципу: первый - тип целевых режимов работы, не требующих согласования с остальными операционными пунктами, и их операционный пункт выполняет в соответствии с рассчитанным временем на реализацию, второй - тип режимов, требующих согласования с остальными операционными пунктами, для этого операционные пункты по каналам связи рассылают данные по второму типу целевых режимов работы всем остальным операционным пунктам совместно с информацией, поясняющей вычисленные целевые режимы работы, при этом каждый операционный пункт вычисляет резервный вариант целевых режимов работы второго типа для подчиненных боевых средств на случай невозможности согласования соответствующих целевых режимов второго типа, затем каждый операционный пункт повторно запускает процедуру расчета целевых режимов работы второго типа операционных пунктов и боевых средств с учетом вновь поступившей по каналам связи информации, в результате вычислений операционные пункты либо принимают к исполнению полученные целевые режимы работы второго типа, либо формируют другой вариант целевых режимов, при этом данные по вновь рассчитанным целевым режимам работы второго типа рассылают по каналам связи всем остальным операционным пунктам и операционные пункты продолжают процесс вычисления, рассылки по каналам связи данных по второму типу целевых режимов работы и согласования второго типа целевых режимов работы операционных пунктов и боевых средств до тех пор, пока не будет достигнуто согласие между операционными пунктами или не истечет время, отведенное на реализацию целевых режимов работы второго типа, при этом в случае согласия между операционными пунктами операционные пункты приступают к реализации согласованных целевых режимов работы второго типа, а в случае истечения времени на реализацию целевых режимов работы второго типа и если не проведено ни одной итерации согласования, операционные пункты реализуют резервный вариант соответствующего целевого режима работы второго типа, или, если получены частично согласованные целевые режимы работы второго типа, операционные пункты оценивают целевые режимы работы, полученные по каналам связи на предыдущих итерациях согласования, и реализуют те, которые обеспечивают наибольший целевой результат функционирования системы, затем операционные пункты контролируют свои режимы работы и режимы работы подчиненных боевых средств, а также поступление по каналам связи измененных данных о режимах работы от всех остальных операционных пунктов, при этом в случае приема измененных данных или в случае изменения режимов работы подчиненных боевых средств операционные пункты возобновляют последовательное выполнение операций: рассылают по каналам связи в соответствии с присвоенными в операционных пунктах рангами информацию всем остальным операционным пунктам; принимают по каналам связи информацию от остальных операционных пунктов; вычисляют целевые режимы работы соответствующих операционных пунктов и боевых средств с учетом влияния вновь поступившей по каналам связи информации; вычисляют время, отведенное на реализацию данных режимов работы; выделяют два типа целевых режимов работы операционных пунктов и боевых средств, в том числе вычисляют резервные варианты целевых режимов работы второго типа; выполняют в соответствии с рассчитанным временем на реализацию целевые режимы работы первого типа, а также рассылают по каналам связи данные по второму типу целевых режимов работы всем остальным операционным пунктам; вычисления, рассылки и согласования целевых режимов работы второго типа продолжают до тех пор, пока не будет достигнуто согласие между операционными пунктами или не истечет время, отведенное на реализацию целевых режимов работы второго типа; реализуют целевые режимы работы второго типа, контролируют свои режимы работы и режимы работы подчиненных боевых средств, а также поступление по каналам связи измененных данных о режимах работы от всех остальных операционных пунктов.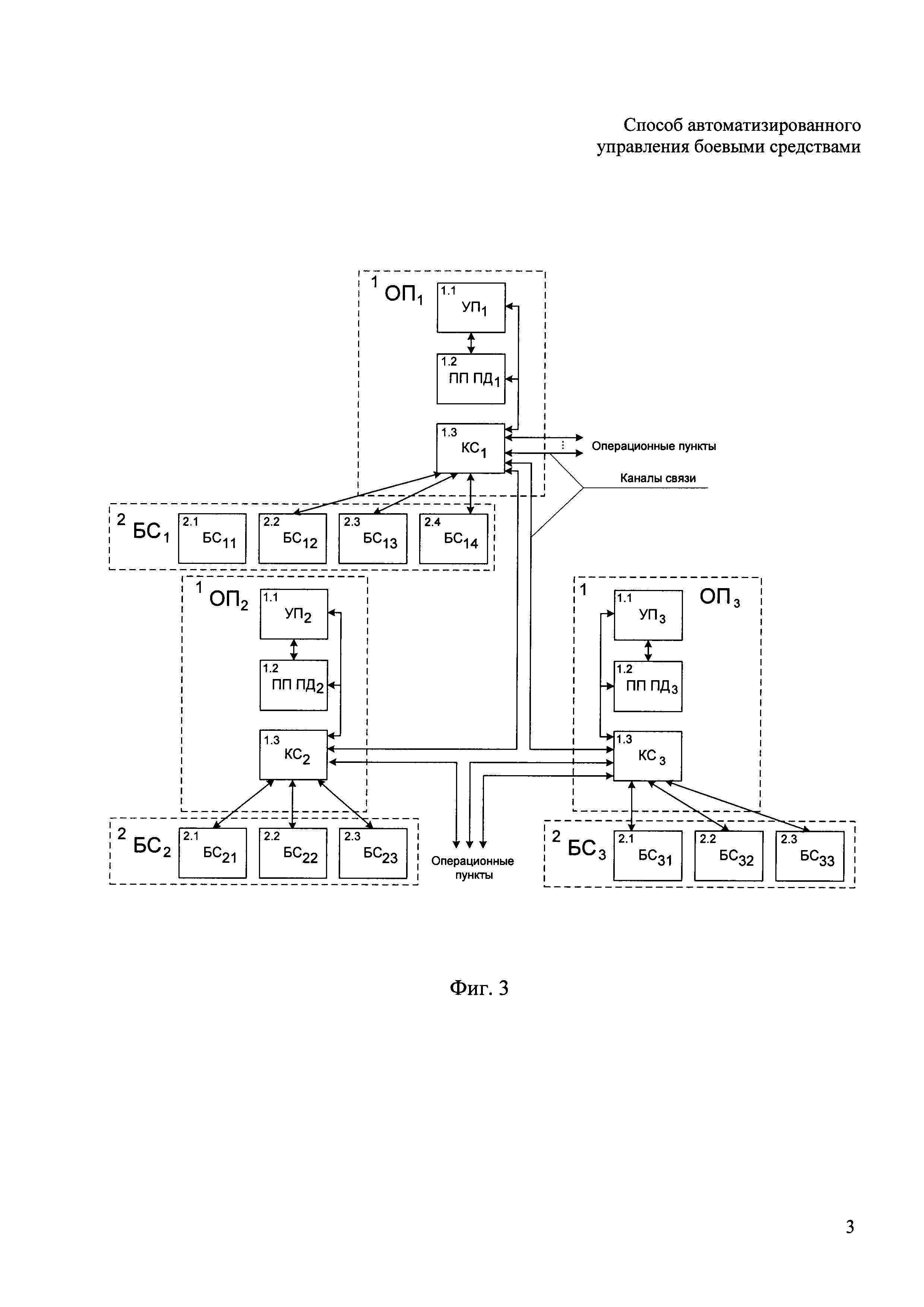
Способ распределенного автоматизированного управления боевыми средствами и операционный пункт для его реализации
Способ снижения погрешности оценок собственных координат автономного необитаемого подводного аппарата с инерциальной навигационной системой
Гидролокационный способ обнаружения подвижных подводных объектов с движущейся подводной платформы
Способ проводки морских и речных судов по заданному курсу
Способ измерения пространственных координат цели в многопозиционной системе двухкоординатных рлс
Способ приема многочастотного манипулированного цифрового сигнала
Способ определения высоты цели двухкоординатной рлс
Перестановочный декодер с режимом обучения
Система автоматического управления движением судна
Способ адаптивного сопровождения радиолокационных целей и устройство для его реализации
Способ распределенного автоматизированного управления боевыми средствами и операционный пункт для его реализации
Способ снижения погрешности оценок собственных координат автономного необитаемого подводного аппарата с инерциальной навигационной системой
Гидролокационный способ обнаружения подвижных подводных объектов с движущейся подводной платформы
Способ проводки морских и речных судов по заданному курсу
Способ измерения пространственных координат цели в многопозиционной системе двухкоординатных рлс
Способ приема многочастотного манипулированного цифрового сигнала
Способ определения высоты цели двухкоординатной рлс
Перестановочный декодер с режимом обучения
Система автоматического управления движением судна
Линия передачи цифрового оптического сигнала

