Результат интеллектуальной деятельности: СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Изобретение относится к способу обнаружения движущегося объекта из захваченных изображений.
УРОВЕНЬ ТЕХНИКИ
[0002] Космический мусор представляет собой неработающий искусственный объект, который движется по орбите Земли. Обнаружение наличия космического мусора является важным для бесперебойной работы космических летательных аппаратов (искусственных спутников, космических станций, космических шаттлов и т.п.). Один способ из числа традиционных способов обнаружения космического мусора определяет наличие космического мусора посредством извлечения частей с высокой яркостью соответственно из изображений, захваченных посредством камеры CCD (прибора с зарядовой связью) на Земле или на орбите.
[0003] Этот способ включает в себя: обрезку областей с идентичным размером из трех или более изображений, захваченных с определенными временными интервалами в соответствии с перемещением движущегося объекта, такого как космический мусор; и применение способа наложения к обрезанным областям изображения. Здесь перемещение движущегося объекта представляет собой, например, равномерное движение и т.п., имеющее векторы (скорости) мобильности в двумерном направлении в системе координаты XY. Конкретно говоря, обрезанные области изображения накладываются друг на друга, и срединное значение оценивается из пиксельных значений в идентичных пикселах для наложенных областей изображения. Если срединное значение, оцененное таким способом, равно или превышает предварительно определенное значение, пиксел извлекается в качестве пиксела, представляющего наличие движущегося объекта (см., например, PTL 1 и PTL 2).
[0004] Способ наложения является повсеместно используемым эффективным способом не только для обнаружения космического мусора, но также и для обнаружения движущегося объекта с низким уровнем яркости в изображении. Кроме того, как описано выше, способ наложения использует срединное пиксельное значение в качестве значения оценки для обнаружения движущихся объектов. Следовательно, способ наложения не приводит к повышению значения оценки, даже если оказывается, что компонент шума захвачен в некоторых изображениях (например, звезда или космический луч в космическом пространстве захвачены в некоторых изображениях), в отличие от другого случая, в котором среднее пиксельное значение используется в качестве значения оценки. По этой причине способ наложения является преимущественным для недопущения ошибочного обнаружения движущегося объекта вследствие наличия звезды или космического луча, который оказывается захваченным.
[0005] Коррекция темного для компонента смещения, уникального для CCD-элемента, и плоская коррекция для потемнения к краю диска, обусловленного характеристиками оптической системы (линзы и ньютоновского отражателя) астрономического телескопа, который используется в комбинации с CCD-камерой, считаются эффективными для того, чтобы повышать точность определения также (см., например, NPL 1).
[0006] Кроме того, коррекция для градационного изменения яркости фонового света, который возникает вследствие облаков в небе, рассеяния света в атмосфере или наличия области с локально высокой яркостью, также считается эффективной для того, чтобы повышать точность определения (см., например, NPL 2).
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0007] PTL 1
Публикация заявки на патент (Япония) № 2002-139319
PTL 2
Публикация заявки на патент (Япония) № 2003-323625
НЕПАТЕНТНЫЕ ДОКУМЕНТЫ
[0008] NPL 1
Yanagisawa T. and Nakajima A. [2005] "Automatic Detection Algorism for Small Moving Object". Publications of the Astronomical Society of Japan, 57, p. 399-408.
NPL 2
Paolillo F. and Porfilio M. "First Italian Space debris Observatory: Images Processing Automation". Proceedings of International Astronautical Congress, 2007, IAC-07-A6.I-05.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[0009] Когда вышеописанные различные компоненты шума скорректированы, содержимое компонентов шума оценивается посредством использования сигналов изображений, полученных посредством фотографирования изображений с помощью CCD-камеры в соответствующих условиях, и содержимое коррекции определяется на основе содержимого компонента шума.
[0010] Тем не менее, компоненты шума, появляющиеся, когда захваченные изображения оцифрованы в сигналы изображений, такие как тепловой шум фотодетекторов и шум считывания CCD-элементов, которые возникают в CCD-камере, включены не только в сигналы изображений до подвергания коррекции темного, плоской коррекции и т.п., но также и в сигналы изображений, используемые для того, чтобы определять значения коррекции.
[0011] По этой причине, когда сигналы изображений до коррекции скорректированы с использованием значений коррекции, компоненты шума, возникающие в ассоциации с оцифровыванием захваченных изображений, добавляются в сигналы изображений после подвергания коррекции темного, плоской коррекции и т.п., и соответственно снижают точность, с которой можно обнаруживать движущийся объект.
[0012] Изобретение осуществлено с учетом вышеприведенных ситуаций. Цель изобретения заключается в том, чтобы предоставлять способ обнаружения движущихся объектов для обнаружения объекта для обнаружения в изображениях на основе уровней сигнала, причем способ допускает сокращение компонентов уровня шума, существующих в фоновой области позади объекта для обнаружения, в каждом изображении.
РЕШЕНИЕ ЗАДАЧИ
[0013] Аспект изобретения предоставляет способ (способ обнаружения движущихся объектов) обнаружения движущегося объекта, представляющего собой объект наблюдения, с использованием множества изображений, захваченных с равными интервалами, включающий в себя обнаружение движущегося объекта, представляющего собой объект наблюдения, посредством использования множества изображений после коррекции смещения, полученных посредством выполнения коррекции смещения для пиксельных значений пикселов для всех изображений с использованием наименьшего пиксельного значения из пикселов для всех изображений.
[0014] Коррекция смещения может выполняться для пиксельных значений посредством использования наименьшего пиксельного значения из пиксельных значений пикселов для нескольких изображений, захваченных с фиксированной фотографической областью.
[0015] Изображения после коррекции смещения могут быть последовательно перемещены в соответствии с содержимым, соответствующим оцененному содержимому перемещения движущегося объекта, представляющего собой объект наблюдения, с равными интервалами, и движущийся объект, представляющий собой объект наблюдения, обнаруживается из множества изображений после коррекции смещения на основе пиксельных значений в идентичных пиксельных позициях, перекрывающих друг друга для изображений после коррекции смещения.
[0016] Способ может включать в себя выполнение процесса фильтрации для каждого пиксела в одном изображении из множества изображений после коррекции смещения и вычисление пиксельного значения пиксела, причем процесс фильтрации сконфигурирован с возможностью перемещать одно изображение и другое изображение после коррекции смещения, которое фотографируется за один интервал до или после одного изображения с равными интервалами, в соответствии с содержимым, соответствующим уже известному содержимому перемещения с равными интервалами движущегося объекта, отличающегося от объекта наблюдения, и вычитать пиксельные значения в пикселах в выводимом изображении из пиксельных значений в пикселах в одном изображении, причем пикселы в другом изображении перекрываются и расположены в пиксельных позициях, идентичных пиксельным позициям соответствующих пикселов в одном изображении. Способ может включать в себя использование вычисленных пиксельных значений после процесса фильтрации в качестве пиксельных значений в одном изображении после коррекции смещения.
[0017] Движущийся объект, представляющий собой объект наблюдения, может представлять собой объект, движущийся по орбите Земли. Изображения могут представлять собой изображения, которые сфотографированы с интервалами в ходе наблюдения в фиксированные моменты.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0018] Когда объект для обнаружения в изображениях обнаруживается на основе уровней сигнала, изобретение может уменьшать компоненты шума, существующие в фоновой области позади объекта для обнаружения в каждом изображении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
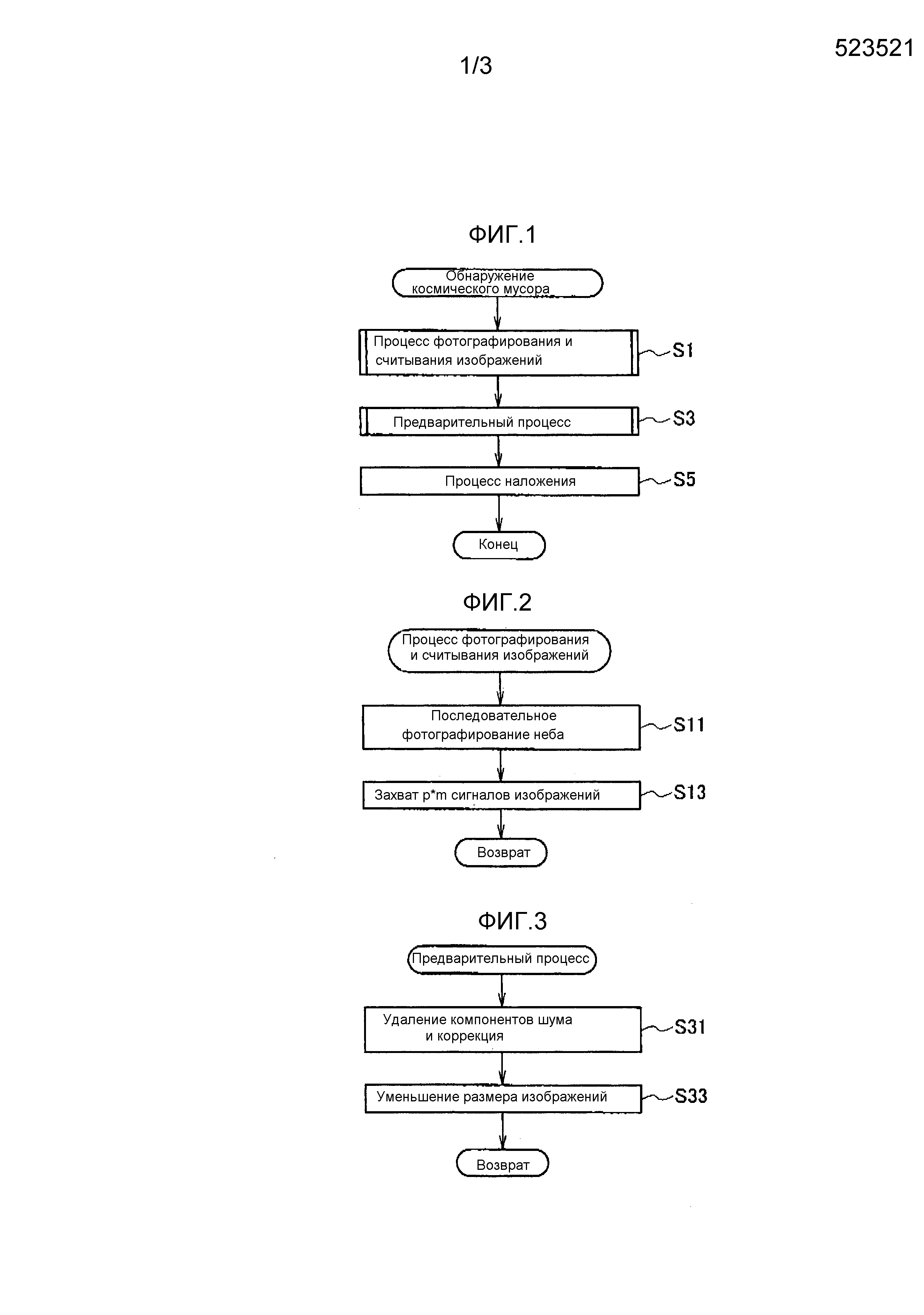
[0019] Фиг. 1 является блок-схемой последовательности операций способа, показывающей процедуры, когда способ обнаружения движущихся объектов изобретения применяется к обнаружению космического мусора из изображений, в которых захвачено небо.
Фиг. 2 является блок-схемой последовательности операций способа, показывающей конкретную процедуру этапа процесса фотографирования (захвата) и считывания изображений, показанного на блок-схеме последовательности операций способа по фиг. 1.
Фиг. 3 является блок-схемой последовательности операций способа, показывающей конкретную процедуру этапа предварительного процесса, показанного на блок-схеме последовательности операций способа по фиг. 1.
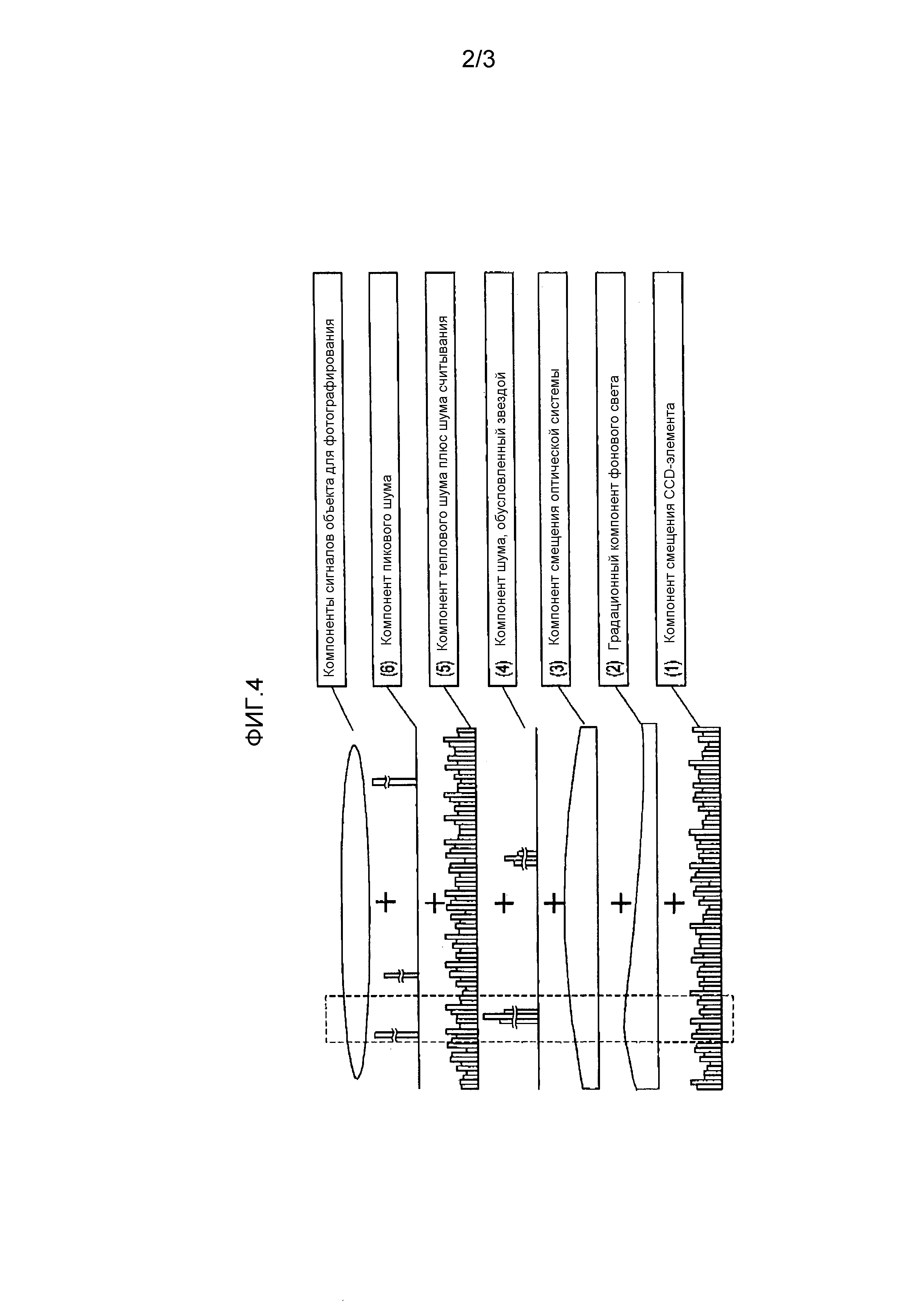
Фиг. 4 является пояснительной схемой, схематично показывающей то, как компоненты шума, которые должны удаляться на этапе удаления и коррекции компонентов шума на фиг. 3, распределены на идентичной линии в поперечном направлении плоскости изображения.
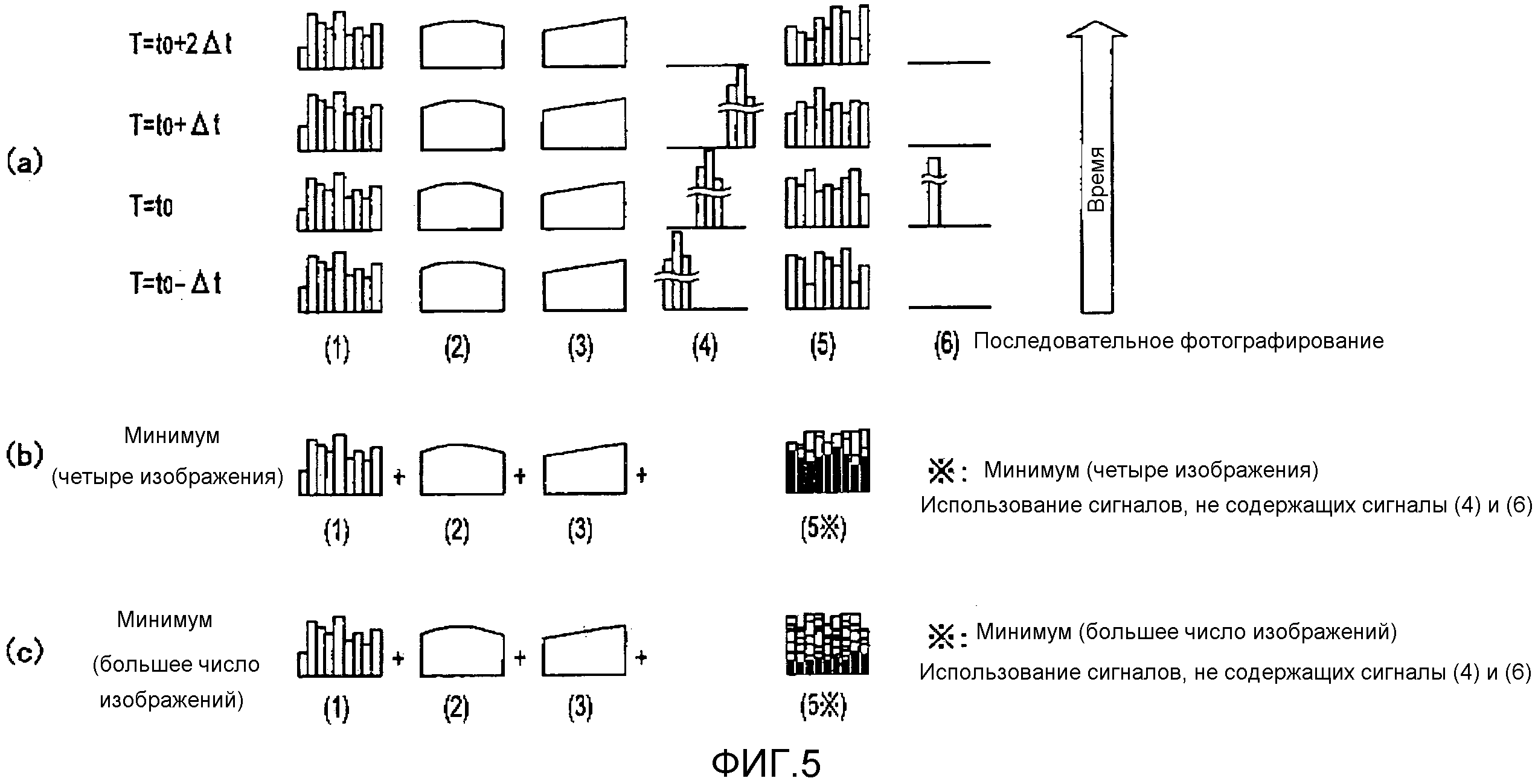
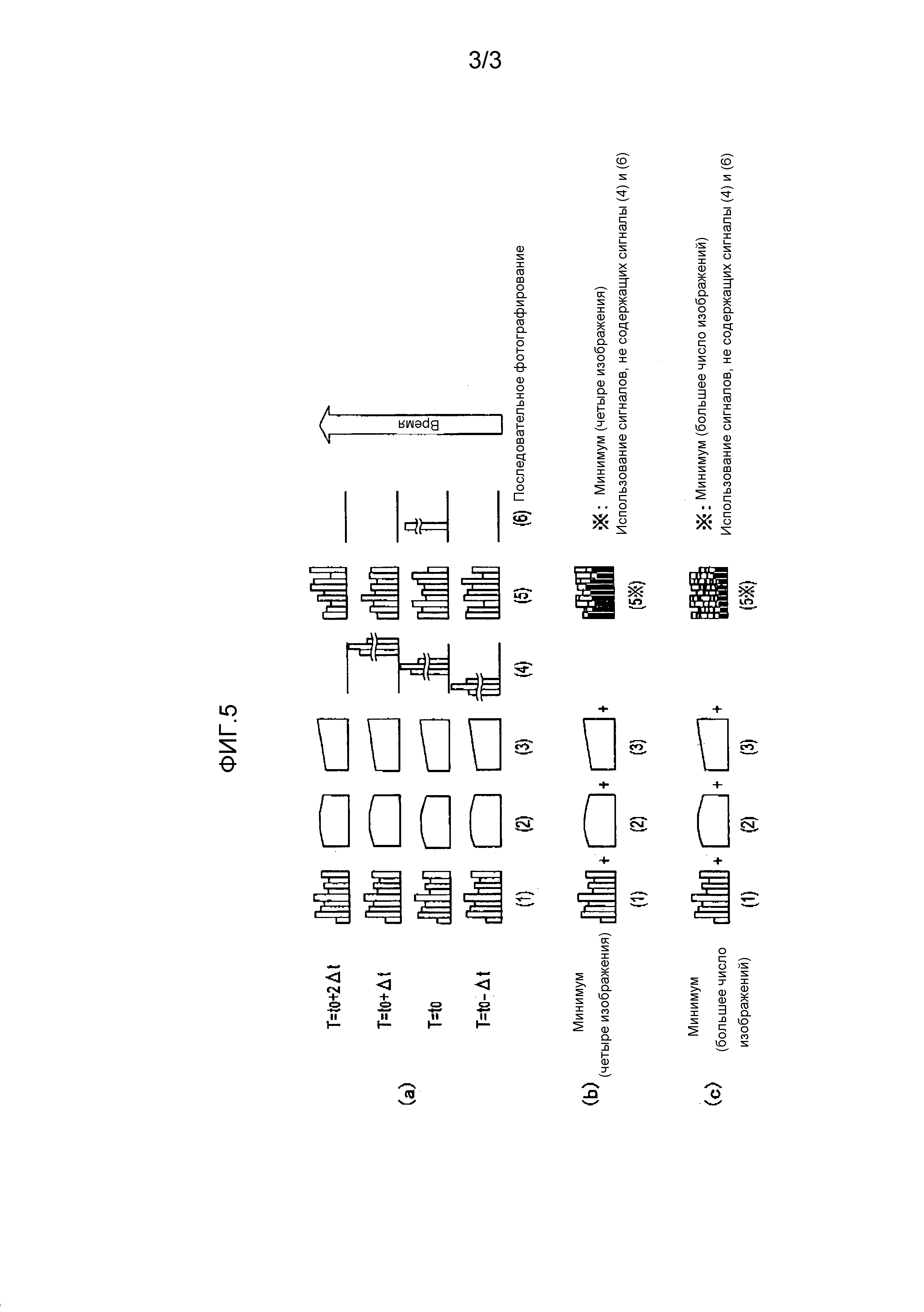
Фиг. 5(a) является пояснительной схемой, показывающей компоненты шума, которые появляются в пиксельной области, обведенной рамкой с пунктирной линией на фиг. 4, в соответствии с моментами времени, когда сфотографированы соответствующие изображения, фиг. 5(b) является пояснительной схемой, показывающей наименьшее значение компонента шума каждого типа, который оценен из четырех изображений на фиг. 5(a), и фиг. 5(c) является пояснительной схемой, показывающей наименьшее значение компонента шума каждого типа, который оценивается из множества изображений, число которых больше четырех изображений на фиг. 5(a).
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0020] Со ссылкой на чертежи предоставляется описание для варианта осуществления, в котором способ обнаружения движущихся объектов изобретения применяется к обнаружению космического мусора из сфотографированных астронавигационных изображений.
[0021] Способ обнаружения движущихся объектов по варианту осуществления разработан с возможностью обнаруживать космический мусор в качестве движущегося объекта, представляющего собой объект наблюдения, из сфотографированных астронавигационных изображений. Как описано на блок-схеме последовательности операций способа по фиг. 1, этот способ разработан с возможностью выполнять этап процесса фотографирования (захвата) и считывания изображений (этап S1), этап предварительного процесса (этап S3) и этап процесса наложения (этап S5).
[0022] Как показано на блок-схеме последовательности операций способа по фиг. 2, этап процесса фотографирования и считывания изображений (этап S1 на фиг. 1) начинается с многократной съемки последовательности фотографий пространства (неба), включающих в себя геостационарную орбиту космического мусора, в течение предварительно определенного времени экспозиции с постоянными временными интервалами (этап S11). Затем этап процесса считывания изображений (этап S1 по фиг. 1) завершается захватом сигналов изображений, представляющих захваченные изображения (этап S13).
[0023] Устройство фотографирования (захвата) (не проиллюстрировано), сформированное посредством подключения CCD-камеры к астрономическому телескопу, например, может использоваться для съемки изображений неба.
[0024] После этого, как показано на блок-схеме последовательности операций способа по фиг. 3, этап предварительного процесса (этап S3 на фиг. 1) начинается с выполнения коррекций для сигналов изображений, захваченных из фотографического устройства (не проиллюстрировано), посредством удаления компонентов шума, включенных в сигналы изображений (этап S31). После этого размер изображений, представляющих скорректированные сигналы изображений, уменьшается до размера изображения, которое должно обрабатываться на нижеописанном этапе процесса наложения (этап S5 на фиг. 5) (этап S33). В варианте осуществления размер изображений уменьшается наполовину в вертикальном и горизонтальном направлениях (на четверть с точки зрения области). Затем наибольшее пиксельное значение в 2×2 пикселах до уменьшения назначается в качестве пиксельного значения одному пикселу после уменьшения. Следовательно, завершается этап предварительного процесса (этап S3 на фиг. 1).
[0025] Далее предоставляется описание подробной процедуры для выполнения коррекции посредством удаления компонентов шума на этапе S31. Как схематично показано на фиг. 4, в основном 6 типов компонентов шума накладываются на компонент сигнала, который представляет намеченный фотографический объект, после того как изображения сфотографированы с помощью фотографического устройства (не проиллюстрировано), и до того как захватываются сигналы изображений. Следует отметить, что фиг. 4 схематично показывает компоненты шума, существующие на идентичной линии в поперечном направлении плоскости изображения в сигнале изображения.
[0026] Во-первых, компонент шума первого типа представляет собой "(1) компонент смещения CCD-элемента", показанный в нижней строке на фиг. 4. Компонент смещения CCD-элемента представляет собой компонент шума, который возникает, когда изображение объекта, сфотографированного посредством фотографического устройства (не проиллюстрировано) с использованием астрономического телескопа, преобразовано в электрический сигнал посредством CCD-элемента CCD-камеры. Другими словами, когда вывод должен соответствовать нулевой яркости (т.е. когда количество света из объекта равно нулю), CCD-элемент в некоторых случаях может сдвигать (смещать) фактический вывод от точки 0 (нуль). Кроме того, содержимое сдвига (смещения) варьируется в зависимости от CCD-элемента.
[0027] В качестве меры противодействия, когда фотографируется объект с нулевой яркостью, компонент смещения CCD-элемента корректируется (т.е. подвергается коррекции смещения), чтобы сигнал изображения, выведенный из фотографического устройства, стал равным 0. В этой связи коррекция смещения этого случая называется "коррекцией темного". Значение коррекции может быть получено посредством оценки значения вывода из CCD-элемента во время фотографирования при блокировании светоприемного модуля от света.
[0028] Затем значение коррекции, оцененное таким способом, вычитается из пиксельного значения в каждом из пикселов, которые соответствуют изображению неба, сфотографированного посредством фотографического устройства для обнаружения движущихся объектов. Это позволяет корректировать компонент смещения CCD-элемента.
[0029] Компонент шума второго типа представляет собой "(2) градационный компонент фонового света", показанный во второй строке снизу на фиг. 4. Градационный компонент фонового света возникает, когда свет рассеивается посредством облаков или атмосферы, либо когда область с высокой яркостью существует локально. Конкретно говоря, градационный компонент возникает, когда яркость неба, которое должно быть сфотографировано посредством фотографического устройства (не проиллюстрировано), является неоднородной, и яркость неба в качестве фона градационно меняется, например, в зависимости от угла возвышения относительно точки наблюдения или от расстояния от точки с высокой яркостью.
[0030] По этой причине коррекция для градационного компонента неба может осуществляться посредством вычитания оцененного значения коррекции из пиксельных значений в пикселах, которые представляют небо, сфотографированное с помощью фотографического устройства для целей обнаружения движущихся объектов.
[0031] С этой целью коррекция для градационного компонента фонового света выполняется таким способом, что при фотографировании изображений объекта с однородной яркостью сигналы изображений, выведенные из фотографического устройства, становятся равномерными для всего изображения объекта. Желательно, чтобы значение коррекции в этом случае оценивалось на основе аппроксимации градационных изменений с выражениями в виде линейной функции посредством использования сигналов изображений, полученных посредством выполнения коррекции для вышеописанного "(1) компонента смещения CCD-элемента" при фотографировании изображения объекта с однородной яркостью или посредством использования сигналов изображений, полученных посредством выполнения дополнительной коррекции для "(3) компонента смещения оптической системы", который описывается ниже, в дополнение к коррекции для "(1) компонента смещения CCD-элемента".
[0032] Способ получения градации в качестве наклонов на X- и Y-оси показан в работе "First Italian Space debris Observatory: Images Processing Automation" by Paolillo F. and Porfilio M., in IAC-07-A6.I.05 for International Astronautical Congress, 2007, которая приведена в списке библиографических ссылок (NPL 2) в разделе "Предшествующий уровень техники". Согласно способу, показанному в документе, для каждой строки в изображении, из которого оценено срединное значение, формируются данные в матрице l×x, и линейное выражение (v=ax+c) для того, чтобы аппроксимировать градацию в направлении по оси X, определяется с использованием метода наименьших квадратов. Аналогично для каждого столбца в изображении, из которого оценено срединное значение, формируются данные в матрице y×l, и линейное выражение (v=by+c) для того, чтобы аппроксимировать градацию в направлении по оси Y, определяется с использованием метода наименьших квадратов.
[0033] После этого оцененное значение коррекции вычитается из пиксельных значений в пикселах, которые представляют небо, которое должно быть сфотографировано с помощью фотографического устройства для целей обнаружения движущихся объектов. В силу этого, может осуществляться вышеописанная коррекция для градационного компонента неба.
[0034] Компонент шума третьего типа представляет собой "(3) компонент смещения оптической системы", показанный в третьей строке снизу на фиг. 4. Компонент смещения оптической системы вызывается посредством характеристик оптической системы, такой как ньютоновское отражающее зеркало или линза, в астрономическом телескопе, когда изображение объекта фотографируется посредством фотографического устройства (не проиллюстрировано) с использованием астрономического телескопа. Конкретно говоря, яркость периферийной части изображения, в котором объект захвачен посредством оптической системы, уменьшается (потемнение к краю диска). Потемнение к краю диска возникает в большем масштабе по мере того, как изображение объекта становится более ярким.
[0035] По этой причине коррекция выполняется для компонента смещения оптической системы таким способом, что при фотографировании изображений объекта с однородной яркостью сигналы изображений, выведенные из фотографического устройства, становятся равномерными для всего изображения объекта. Коррекция смещения в этом случае называется "плоской коррекцией"; желательно, чтобы значение коррекции оценивалось на основе получения распределения потемнения к краю диска посредством использования сигналов изображений, полученных посредством выполнения коррекции для вышеописанного "(1) компонента смещения CCD-элемента" при фотографировании изображения объекта с однородной яркостью.
[0036] В этой связи изображение объекта с однородной яркостью может быть получено, например, посредством: установки фрагмента матового стекла и т.п. перед телескопом; фотографирования объекта с использованием всего поля зрения телескопа с однородным светом, отбрасываемым на фрагмент матового стекла.
[0037] После этого оцененное значение коррекции вычитается из пиксельных значений в пикселах, которые представляют небо, которое должно быть сфотографировано с помощью фотографического устройства для целей обнаружения движущихся объектов. В силу этого может осуществляться вышеописанная коррекция для компонента смещения оптической системы.
[0038] Относительно каждого из трех типов компонентов шума, описанных выше, процесс коррекции традиционно осуществляется посредством: извлечения компонента шума; и вычитания компонента шума из сигналов изображений. Тем не менее, традиционные процессы коррекции добавляют другие компоненты шума, содержащиеся в извлеченных компонентах шума, и другие компоненты шума остаются в скорректированных сигналах изображений. По этой причине вариант осуществления направлен на разрешение проблемы посредством использования следующих способов.
[0039] До того, как предоставляется описание того, как вариант осуществления разрешает проблему, поясним другие компоненты шума, которые добавляются и остаются в скорректированных сигналах изображений в результате традиционных процессов коррекции (т.е. компоненты шума четвертого-шестого типов, которые описываются далее).
[0040] Начнем пояснение с компонента шума четвертого типа. Компонент шума "(4) компонент шума, обусловленный звездой", показанный в четвертой строке снизу на фиг. 4, возникает, когда звезда в небе захвачена в изображениях, захваченных с помощью фотографического устройства (не проиллюстрировано) таким способом, что в зависимости от скорости перемещения звезда захватывается в качестве точки или линии с размытыми окрестностями.
[0041] Компонент шума, обусловленный звездой, может исключаться из каждого из изображений посредством перемещения каждого изображения и его предыдущего или последующего изображения, захваченного последовательно посредством фотографического устройства (не проиллюстрировано), посредством параллельного смещения в уже известном направлении перемещения и на уже известную величину перемещения звезды и вычитания пиксельных значений в идентичных пиксельных позициях, перекрывающих друг друга для двух изображений (процесс фильтрации).
[0042] Далее, компонент шума пятого типа представляет собой "(5) компонент теплового шума плюс шума считывания", показанный в третьей строке сверху на фиг. 4. Тепловой шум и компонент шума считывания возникают вследствие: фотографирования изображения объекта с помощью фотографического устройства (не проиллюстрировано); и вывода сигналов изображений, которые представляют изображение.
[0043] Из них тепловой шум представляет собой компонент шума, который остается в CCD-элементе вследствие тепловой вибрации электронов в фотодетекторе, когда фотодетектор формирует электрические заряды в зависимости от количества света сформированного изображения объекта. С другой стороны, шум считывания представляет собой компонент шума, который возникает, когда электрические заряды, в которые CCD-элемент преобразует изображение объекта, считываются из CCD-элемента. Шум считывания включает в себя все шумы, которые возникают в CCD-элементе в аналоговых схемах, используемых для того, чтобы управлять CCD-элементом и считывать электрические заряды, а также в аналого-цифровом преобразователе.
[0044] Вышеописанный "(5) компонент теплового шума плюс шума считывания" представляет собой случайный шум, который не зависит от того, где или когда возникает шум, и который варьируется случайным способом. Общеизвестно, что тепловой шум, который представляет собой дробовый шум, демонстрирует пуассоновское распределение, в то время как шум считывания демонстрирует гауссово распределение.
[0045] Далее, компонент шума шестого типа представляет собой "(6) компонент пикового шума", показанный во второй строке сверху на фиг. 4. Компонент пикового шума представляет собой компонент шума, который возникает под влиянием космических лучей. В некоторых случаях компонент пикового шума приводит к тому, что некоторые пикселы показывают мгновенное значительное увеличение пиксельного значения в иррегулярные моменты времени.
[0046] Здесь для каждого из четырех изображений, захваченных с помощью фотографического устройства (не проиллюстрировано) в соответствующие четыре последовательных момента времени (T=t0-At, t0, t0+At и t0+2At), содержимое компонента шума, включенное в сигнал изображения, дискретно показано на принципиальной схеме по фиг. 5(a). В частности, фиг. 5(a) показывает формы сигналов, извлеченные из части одной линии в поперечном направлении плоскости изображения, которая обведена пунктирными линиями на фиг. 4. Аналогично принципиальные схемы фиг. 5(b) и 5(c), которые используются для нижеприведенного пояснения, показывают формы сигналов, извлеченные из части линии.
[0047] Как показано на фиг. 5(a), компоненты шума "(1) компонент смещения CCD-элемента", "(2) градационный компонент фонового света" и "(3) компонент смещения оптической системы" зависят от фотографического устройства и сфотографированной области неба. По этой причине до тех пор, пока продолжает использоваться идентичное фотографическое устройство и пока продолжает фотографироваться идентичная область неба, вышеуказанные компоненты шума появляются в каждом изображении в качестве постоянного содержимого независимо от того, в какой момент времени фотографируется изображение. Помимо этого, содержимое "(4) компонента шума, обусловленного звездой" зависит от яркости звезды, хотя позиции пикселов, в которых захвачена звезда, изменяются в соответствии с перемещением звезды. По этой причине до тех пор, пока идентичная звезда продолжает захватываться в изображениях, этот компонент шума также появляется в каждом изображении.
[0046] Напротив, компоненты шума "(5) компонент теплового шума плюс шума считывания" и "(6) компонент пикового шума" представляют собой случайные шумы. По этой причине их содержимое варьируется в зависимости от изображений. Это делает невозможным определение надлежащего содержимого коррекции заранее.
[0049] То, что пояснено выше, охватывает содержимое компонента шума, включенное в сигналы, которые представляют изображения, захваченные посредством фотографического устройства (не проиллюстрировано). Когда значения коррекции определяются соответственно для компонентов шума "(1) компонент смещения CCD-элемента", "(2) градационный компонент фонового света" и "(3) компонент смещения оптической системы" с использованием традиционного способа коррекции, пиксельные значения, исключающие максимально возможное число из этих компонентов шума, оцениваются из сигналов изображений из фотографического устройства на основе вычислений и т.п.
[0050] Между тем, в зависимости от ситуаций фотографирования, "(4) компонент шума, обусловленный звездой", "(5) компонент теплового шума плюс шума считывания", который представляет собой случайный шум, и "(6) компонент пикового шума" без конкретной регулярности накладываются на сигналы изображений из фотографического устройства, которые используются для того, чтобы определять значения коррекции.
[0051] По этой причине даже если компонент шума "(4) компонент шума, обусловленный звездой" исключается на основе вышеприведенной процедуры, компоненты шума "(5) компонент теплового шума плюс шума считывания" и "(6) компонент пикового шума" по-прежнему остаются включенными, как описано выше, в значения коррекции, которые определяются соответственно для компонентов шума "(1) компонент смещения CCD-элемента", "(2) градационный компонент фонового света" и "(3) компонент смещения оптической системы".
[0052] Соответственно, когда компоненты шума "(1) компонент смещения CCD-элемента", "(2) градационный компонент фонового света" и "(3) компонент смещения оптической системы", включенные в пиксельные значения, скорректированы соответственно посредством использования значений коррекции для компонентов шума, компоненты шума "(5) компонент теплового шума плюс шума считывания" и "(5) компонент пикового шума" добавляется и включаются в скорректированные пиксельные значения.
[0053] С учетом этого вариант осуществления направлен на разрешение проблемы посредством выполнения коррекции посредством удаления компонентов шума, как описано ниже, на этапе S31 на фиг. 3, для выполнения коррекции посредством удаления компонентов шума. С этой целью, в первую очередь, несколько изображений сфотографированы посредством фотографического устройства с фиксированным полем зрения, и наименьшее пиксельное значение выбирается из каждой группы соответствующих пикселов для нескольких изображений.
[0054] В этом отношении в случае, если звезда захвачена в изображениях, или в случае, если возникает пиковый шум, достаточно большое значение в качестве компонента шума добавляется в пиксельные значения. Как результат, пиксельные значения в пикселах, в которых захвачена звезда, или в которых добавляется пиковый шум, не становятся наименьшим в нескольких изображениях. По этой причине наименьшее пиксельное значение в каждой группе соответствующих пикселов для нескольких изображений выбирается в качестве пиксельного значения пиксела, в котором, по меньшей мере, не захвачена звезда и в котором не добавляется пиковый шум, обусловленный космическими лучами. Вместо этого наименьшие пиксельные значения могут выбираться из нескольких изображений, в которых не захвачены космические лучи в качестве пикового шума, после того, как компонент шума "(4) компонент шума, обусловленный звездой" исключается из нескольких изображений с использованием вышеприведенной процедуры.
[0055] Здесь первые три компонента шума из "(1) компонента смещения CCD-элемента", "(2) градационный компонент фонового света", "(3) компонента смещения оптической системы" и "(5) компонента теплового шума плюс шума считывания", включенные в пиксельные значения в изображениях, в которых не захвачены звезды или космические лучи в качестве пикового шума, являются постоянными компонентами и следовательно включаются во все пикселы в каждом изображении в идентичных количествах. Это означает то, что каждое наименьшее пиксельное значение не включает в себя ни "(4) компонент шума, обусловленный звездой", ни "(6) компонент пикового шума", и что каждое наименьшее пиксельное значение включает в себя "(5) компонент теплового шума плюс шума считывания", содержимое которого варьируется в зависимости от изображений, в меньшем количестве, чем соответствующие пикселы в других изображениях.
[0056] Помимо этого, наименьшее значение "(5) компонента теплового шума плюс шума считывания" равно 0. По этой причине можно считать, что наименьшее пиксельное значение в каждой группе соответствующих пикселов для нескольких изображений, в которых не захвачены звезды или космические лучи в качестве пикового шума, является эквивалентным величине коррекции, которая должна быть выполнена посредством выполнения компенсации для "(1) компонента смещения CCD-элемента", "(2) градационного компонент фонового света" и "(3) компонента смещения оптической системы" в целом.
[0057] Соответственно в качестве величины коррекции наименьшее пиксельное значение, выбранное из каждой группы соответствующих пикселов для нескольких изображений, в которых не захвачены звезды или космические лучи в качестве пикового шума, вычитается из пиксельных значений в изображениях, представляющих область неба, сфотографированную с помощью фотографического устройства для обнаружения движущихся объектов. В силу этого коррекция выполняется в целом для компонентов шума "(1) компонент смещения CCD-элемента", "(2) градационный компонент фонового света" и "(3) компонент смещения оптической системы".
[0058] Следует отметить, что имеется более высокая вероятность того, что величина (представленное посредством заштрихованных частей на гистограмме на каждом из фиг. 5(b) и 5(c)) компонента шума "(5) компонент теплового шума плюс шума считывания" меньше тогда, когда, как показано на принципиальной схеме по фиг. 5(c), наименьшее пиксельное значение выбирается из каждой группы соответствующих пикселов для числа, равного или большего пяти изображений, чем тогда, когда, как показано на принципиальной схеме по фиг. 5(b), наименьшее значение выбирается из каждой группы соответствующих пикселов для четырех изображений.
[0059] По этой причине, если величина коррекции "(5) компонента теплового шума плюс шума считывания" имеет намерение уменьшаться до минимума, желательно, чтобы число изображений, для которых наименьшее пиксельное значение выбирается из каждой группы соответствующих пикселов, увеличивалось в максимально возможной степени. В этом отношении желательно, чтобы наименьшее пиксельное значение выбиралось из каждой группы соответствующих пикселов для всех изображений, которые должны использоваться для процесса наложения, который описывается ниже.
[0060] Затем, после того, как коррекция выполняется для четырех типов компонентов шума, упомянутых выше, "(4) компонент шума, обусловленный звездой" после этого исключается посредством: наложения каждых двух последовательных изображений, представляющих область неба, сфотографированную с помощью фотографического устройства для обнаружения движущихся объектов, посредством перемещения двух последовательных изображений посредством параллельного смещения в соответствии с направлением перемещения звезды и на величину перемещения звезды; и вычитания пиксельных значений в идентичных пиксельных позициях, перекрывающих друг друга для двух изображений. Следовательно, завершается коррекция, которая должна быть выполнена посредством удаления компонентов шума на этапе S31 на фиг. 3.
[0061] После этого с использованием способа наложения этап процесса наложения (этап S5 на фиг. 1) выполняет процесс извлечения возможных вариантов космического мусора для каждого из изображений, последовательно сфотографированных с помощью фотографического устройства (не проиллюстрировано) с постоянными интервалами.
[0062] Конкретно говоря, с использованием пиксельных значений в идентичных пиксельных позициях, перекрывающих друг друга, значение оценки для обнаружения космического мусора вычисляется при (посредством параллельного смещения) последовательном перемещении каждого изображения посредством оцененной скорости перемещения космического мусора (т.е. длины (расстояние или интервал) для изображения с оцененной скоростью перемещения в течение предварительно определенного периода времени). При изменении оцененной скорости перемещения космического мусора это значение оценки вычисляется для каждой оцененной скорости перемещения. Кроме того, вычисление значения оценки с использованием пиксельных значений в идентичных пиксельных позициях, перекрывающих друг друга для изображений, выполняется для каждой пиксельной позиции каждого изображения.
[0063] В качестве значения оценки, например, может использоваться срединное значение, среднее значение и т.п. всех изображений относительно пиксельных значений в позициях целевого пиксела. Например, если значение оценки равно или превышает предварительно определенное пороговое значение в определенном пикселе, то пиксел может быть определен как пиксел, в котором захвачен космический мусор.
[0064] В этом варианте осуществления, как описано выше, на этапе предварительного процесса на этапе S3 по фиг. 1, выполняемом посредством использования способа наложения, наименьшее пиксельное значение из пиксельных значений в идентичных пиксельных позициях всех изображений вычитается из каждого из пиксельных значений в пикселах в изображениях, захваченных с помощью фотографического устройства (не проиллюстрировано).
[0065] В силу этого "(1) компонент смещения CCD-элемента", "(2) градационный компонент фонового света" и "(3) компонент смещения оптической системы", которые постоянно появляются, может исключаться из (пиксельных значений) сигналов изображений. Кроме того, поскольку "(5) компонент теплового шума плюс шума считывания", включенный в наименьшее пиксельное значение, является минимальным количеством, которое находится бесконечно близко к "0", можно в максимально возможной степени не допускать того, чтобы этот тип компонента шума оставался в (пиксельных значениях) скорректированных сигналах изображений.
[0066] Выполнение предварительного этапа, к примеру, как описано, позволяет исключать то, что "(5) компонент теплового шума плюс шума считывания", который должен быть включен в значения коррекции, остается в (пиксельных значениях) скорректированных сигналах изображений, как в случае, когда "(1) компонент смещения CCD-элемента", "(2) градационный компонент фонового света" и "(3) компонент смещения оптической системы" в каждом изображении скорректированы посредством использования по отдельности полученных значений коррекции.
[0067] Соответственно коррекция смещения выполняется таким способом, что наименьшее пиксельное значение из пиксельных значений в идентичных пиксельных позициях для всех изображений вычитается из пиксельных значений в пикселах в изображениях. Таким образом, когда космический мусор обнаруживается посредством способа наложения, можно дополнительно уменьшать компоненты шума в изображениях, которые должны быть наложены, за счет этого обнаруживая возможные варианты для пикселов, в которых захвачен космический мусор, и в конечном счете точно обнаруживая космический мусор.
[0068] Вариант осуществления описан в отношении способа наложения, который должен выполняться для объекта наблюдения, который представляет собой движущийся объект в равномерном прямолинейном движении, для изображений в оцененном направлении перемещения и с оцененной величиной перемещения. Тем не менее, изобретение также является применимым к способу наложения, который должен выполняться для объекта наблюдения, который представляет собой движущийся объект в движении с равномерным ускорением, для изображений с оцененной величиной перемещения, которая увеличивается или уменьшается на постоянную величину во времени.
[0069] Кроме того, технология удаления компонента шума, обусловленного звездой, которая пояснена в качестве части коррекции, которая должна быть выполнена посредством удаления компонентов шума на этапе S31 по фиг. 3, может применяться к движущемуся объекту, отличному от космического мусора, незвездообразному движущемуся объекту, который не представляет собой объект для обнаружения, и может использоваться в качестве технологии удаления компонента шума в захваченных изображениях, в которых захвачен движущийся объект. Тем не менее, поскольку каждые два последовательных захваченных изображения накладываются в соответствии с относительным перемещением, содержимое перемещения движущегося объекта в течение каждого интервала фотографирования (например, направление и величина перемещения движущегося объекта в случае, если движущийся объект находится в равномерном прямолинейном движении) должно быть известным заранее.
[0070] Кроме того, вышеприведенное описание предоставлено для варианта осуществления, в котором способ наложения используется для того, чтобы обнаруживать движущийся объект. Тем не менее, изобретение также является применимым к обнаружению движущегося объекта с использованием отслеживания на основе поблочного сопоставления или отслеживания на основе оптического потока вместо способа наложения. Кроме того, изобретение также является применимым к обнаружению движущегося объекта с использованием процесса, в котором: модель перемещения гипотетически предполагается для движущегося объекта; не только его равномерное прямолинейное движение, но также и его направление перемещения оцениваются с использованием фильтра частиц и т.п.; и очень вероятное тело извлекается в качестве движущегося объекта.
[0071] Кроме того, вышеприведенное описание предоставлено для варианта осуществления, в котором изобретение выполняется в качестве способа обнаружения космического мусора. Тем не менее, изобретение является широко применимым к обнаружению движущегося объекта, отличного от космического мусора, из изображений, захваченных с постоянными интервалами, с использованием, например, идентификации и обнаружения объекта, отличного от космического мусора, к примеру, искусственного спутника, движущегося по орбите Земли, или окрашенных микробов, в захваченных изображениях.
[0072] В варианте осуществления захваченные изображения включают в себя: компонент шума, обусловленный характерным изменением, уникальным для устройства для оцифровывания захваченных изображений в сигналы изображений; компонент шума, обусловленный окружающими условиями, в которых существует фотографический объект; и компонент шума, который возникает в ходе оцифровывания захваченных изображений в сигналы изображений.
[0073] Первые два компонента шума постоянно появляются в идентичном содержимом до тех пор, пока продолжает использоваться устройство, либо остается неизменным окружение, в котором выполняется фотографирование. Эти компоненты шума могут исключаться, когда (пиксельные значения) сигналы изображений скорректированы с использованием содержимого коррекции, определенного на основе содержимого компонентов шума, которые соответственно оцениваются с использованием сигналов изображений, полученных, когда изображения сфотографированы в соответствующих условиях.
[0074] С другой стороны, появление компонента шума, когда захваченные изображения оцифрованы в сигналы изображений, представляет собой случайный шум, который не зависит от времени, окружения и т.п., но варьируется на случайной основе. Кроме того, компонент шума включается не только в сигналы изображений, которые должны быть скорректированы, но также и в сигналы изображений, которые должны использоваться для того, чтобы определять содержимое коррекции. По этой причине, когда (пиксельные значения) сигналы изображений, которые должны быть скорректированы, корректируются с использованием отдельно определенного содержимого коррекции, компонент шума, возникающий во время оцифровывания, добавляется и включается в скорректированные сигналы изображений.
[0075] В отличие от этого, вместе с постоянно появляющимся компонентом шума, обусловленным характерным изменением, уникальным для устройства, и постоянно появляющимся компонентом шума, обусловленным окружением, в котором выполняется фотографирование, компонент шума, возникающий в ходе оцифровывания захваченных изображений в сигналы изображений, который представляет собой случайный шум, включается в наименьшее пиксельное значение в каждой группе соответствующих пикселов для всех изображений, которое используется для того, чтобы выполнять коррекцию смещения для пиксельных значений в изображениях. В этом отношении, случайный шум, включенный в каждую группу соответствующих пикселов для всех изображений, меньше по количеству, чем все остальные компоненты шума.
[0076] По этой причине, когда коррекция смещения выполняется для пиксельных значений изображений с использованием наименьшего пиксельного значения в каждой группе соответствующих пикселов для всех изображений, исключаются постоянно появляющийся компонент шума, обусловленный характерным изменением, уникальным для устройства, и постоянно появляющийся компонент шума типа, обусловленный окружением, в котором выполняется фотографирование. Дополнительно компонент шума типа, возникающего в ходе оцифровывания захваченных изображений в изображения сигналов, который представляет собой случайный шум, уменьшается до наименьшего количества.
[0077] В силу этого можно исключать добавление и включение компонента шума, возникающего в ходе оцифровывания захваченных изображений в сигналы изображений, в (пиксельные значения) скорректированные сигналы изображений, как и в случае отдельной коррекции компонентов шума соответственно в зависимости от соответствующих значений коррекции. Помимо этого, когда объект для обнаружения в изображениях обнаруживается на основе уровней сигнала, можно уменьшать компоненты шума, существующие в фоновой области позади объекта для обнаружения в каждом изображении.
[0078] В варианте осуществления, если движущийся объект, отличающийся от движущегося объекта, представляющего собой объект наблюдения, захвачен в изображениях, и если содержимое перемещения различного движущегося объекта в течение постоянных интервалов известно заранее, пиксельные значения в идентичных пиксельных позициях для последовательных изображений с равными интервалами, перемещенных посредством содержимого, соответствующего содержимому перемещения различного движущегося объекта, вычитаются из изображений после коррекции смещения. В силу этого, когда объект для обнаружения в изображениях обнаруживается на основе уровней сигнала, компоненты шума, существующие в фоновой области позади объекта для обнаружения в каждом изображении, могут еще более уменьшаться.
[0079] В общем, даже если звезда, космические лучи и т.п. захвачены в изображениях с более высокой яркостью вместе с объектом, движущимся по орбите Земли, представляющим собой движущийся объект, представляющий собой объект наблюдения, вариант осуществления дополнительно может сокращать в каждом изображении компоненты шума, которые существуют в фоновой области позади объекта, движущегося по орбите Земли, в каждом изображении.
Камера сгорания
Способ ремонта изношенной торцевой части металлической пластины
Сборка сверхпроводящих катушек и оборудование для генерирования магнитного поля
Монокристаллический суперсплав на основе ni и включающая его лопатка турбины
Нагревательное устройство
Камера сгорания
Электрод для поверхностной обработки разрядом и способ его изготовления
Способ изготовления электрода и разрядная обработка поверхности с помощью него
Комплексное соединение самонамагничивающегося металла с саленом
Способ закрытия отверстий
Камера сгорания
Способ ремонта изношенной торцевой части металлической пластины
Сварочное оборудование
Сборка сверхпроводящих катушек и оборудование для генерирования магнитного поля
Сварочная установка и способ сварки
Рабочее оборудование
Монокристаллический суперсплав на основе ni и включающая его лопатка турбины
Нагревательное устройство
Камера сгорания
Электрод для поверхностной обработки разрядом и способ его изготовления

