Результат интеллектуальной деятельности: ПРИБОР И СПОСОБ КАРОТАЖА СКВАЖИНЫ ПОСРЕДСТВОМ РАДИОЛОКАТОРА МНОГОКОМПОНЕНТНЫХ СИГНАЛОВ
Вид РИД
Изобретение
Уровень техники
В технологиях бурения и каротажа нефтяных скважин для определения удельного электрического сопротивления формаций горных пород, окружающих ствол скважины, часто применяют приборы электромагнитного каротажа. Получаемую информацию об удельном электрическом сопротивлении используют для установления факта наличия или отсутствия углеводородов. Типовой прибор электромагнитного каротажа содержит передающую антенну и пару приемных антенн, расположенных на разных расстояниях от передающей антенны вдоль оси прибора. Передающая антенна предназначена для создания электромагнитных полей в окружающей формации. В свою очередь, электромагнитные поля в формации наводят электрическое напряжение в каждой из приемных антенн. Вследствие геометрического расхождения и поглощения сигналов окружающей геологической формацией наведенные напряжения в двух приемных антеннах имеют разные фазы и амплитуды. Эксперименты показали, что по разности фаз (Ф) и отношению амплитуд (по затуханию, А) наведенных напряжений в приемных антеннах можно определить удельное электрическое сопротивление формации.
Работа таких приборов в области частот накладывает определенные ограничения на их использование для геонавигации, при которой требуется большая дальность обнаружения и получение точных изображений. До определенных пределов указанные требования могут выполняться путем разнесения антенн на большие расстояния, многократного измерения частот и применения сложных алгоритмов решения обратной задачи.
Из уровня техники известны приборы, работающие во временной области, в том числе: «Радиолокационная система наведения бурового долота», раскрытая в документе US 4297699 за авторством J.С. Fowler; «Способ и устройство с импульсным электромагнитным измерителем угла падения, содержащим передающий и приемный катушки, отстоящие друг от друга на заданном расстоянии», раскрытые в документе US 5115198, за авторством S.С. Gianzero; «Скважинная радиолокационная антенна и алгоритм, способ и устройство геофизического исследования», раскрытые в документе US 6712140, за авторством М.S. Van Oers; «Радар бурильной колонны», раскрытый в документе US 6778127, за авторством L.G. Stolarczyk; «Системы и способы, используемые для обнаружения наличия и/или местонахождения материалов», раскрытые в документе US 7123016, за авторством J.W. Larsen; и «Способ регистрации компонентов неустановившегося электромагнитного поля для осуществления геонавигации на большой глубине в процессе бурения», раскрытый в документе US 7046009, за авторством G. Itskovich. Ни одно из указанных технических решений не доказало свою коммерческую состоятельность. Авторы полагают, что такой результат по меньшей мере частично обусловлен высокой стоимостью электронных компонентов, которые слишком уязвимы при работе в предельно тяжелых условиях среды бурения, и отчасти является следствием использования конфигураций антенн, усложняющих процесс решения обратной задачи и интерпретации.
Краткое описание чертежей
Для лучшего понимания сути различных вариантов осуществления настоящего изобретения ниже приведено подробное их описание со ссылками на соответствующие прилагаемые чертежи.
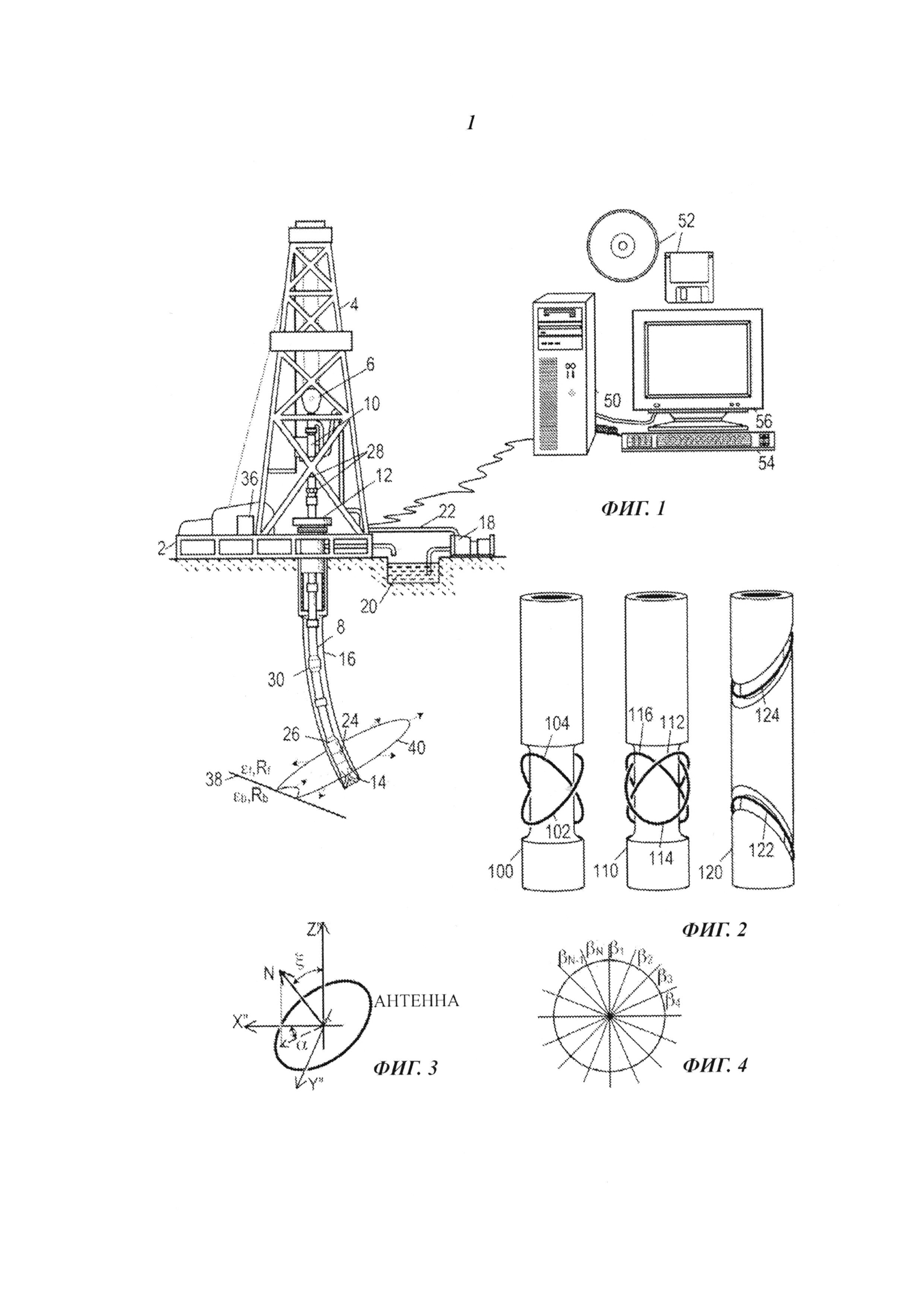
На фиг.1 показан пример системы для выполнения каротажа в процессе бурения при падении границы формации.
На фиг.2 показаны примеры конфигураций антенны прибора электромагнитного каротажа.
На фиг.3 показаны углы для определения ориентации наклонной антенны.
На фиг.4 показано деление окружности скважины на азимутальные ячейки.
На фиг.5 показана примерная структурная схема электронных средств прибора электромагнитного каротажа.
На фиг.6 показана блок-схема способа электромагнитного каротажа.
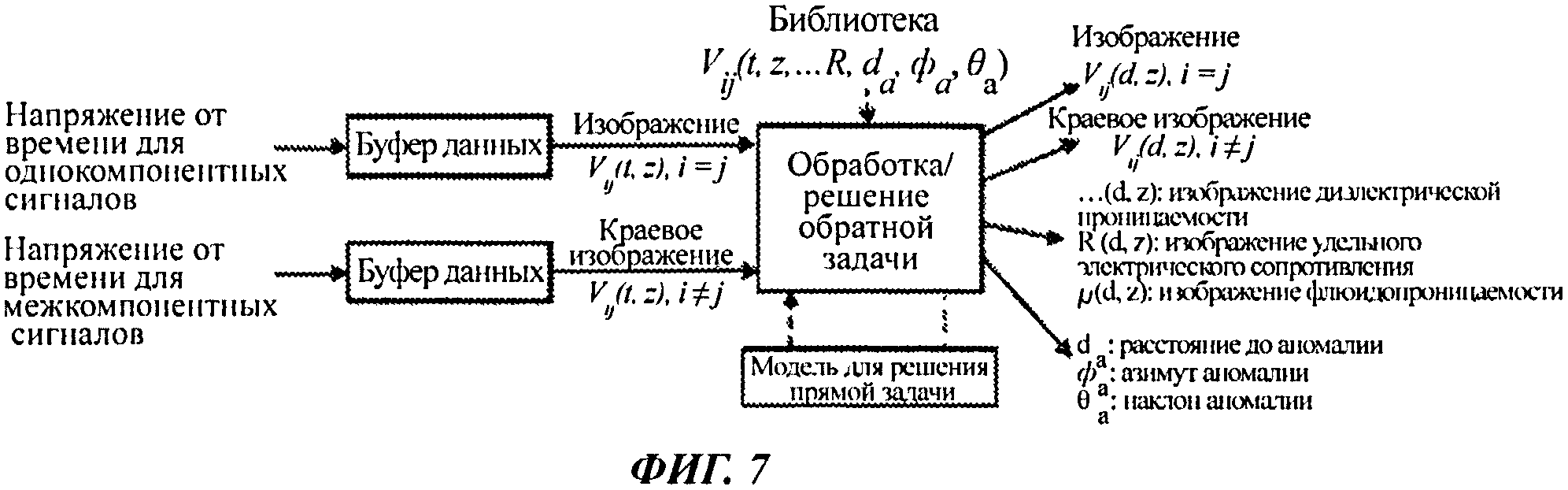
На фиг.7 показана функциональная схема операции решения обратной задачи.
На фиг.8-13 показаны графики амплитуд импульсов полученных сигналов в зависимости от времени для различных условий каротажа.
На фиг.14-16 показаны графики дальности обнаружения в зависимости от различных параметров.
На фиг.17-18 показаны примеры ответных сигналов в виде функции от положения прибора.
На фиг.19 показана информация о направлении, полученная по ответным сигналам, представленным на фиг.18.
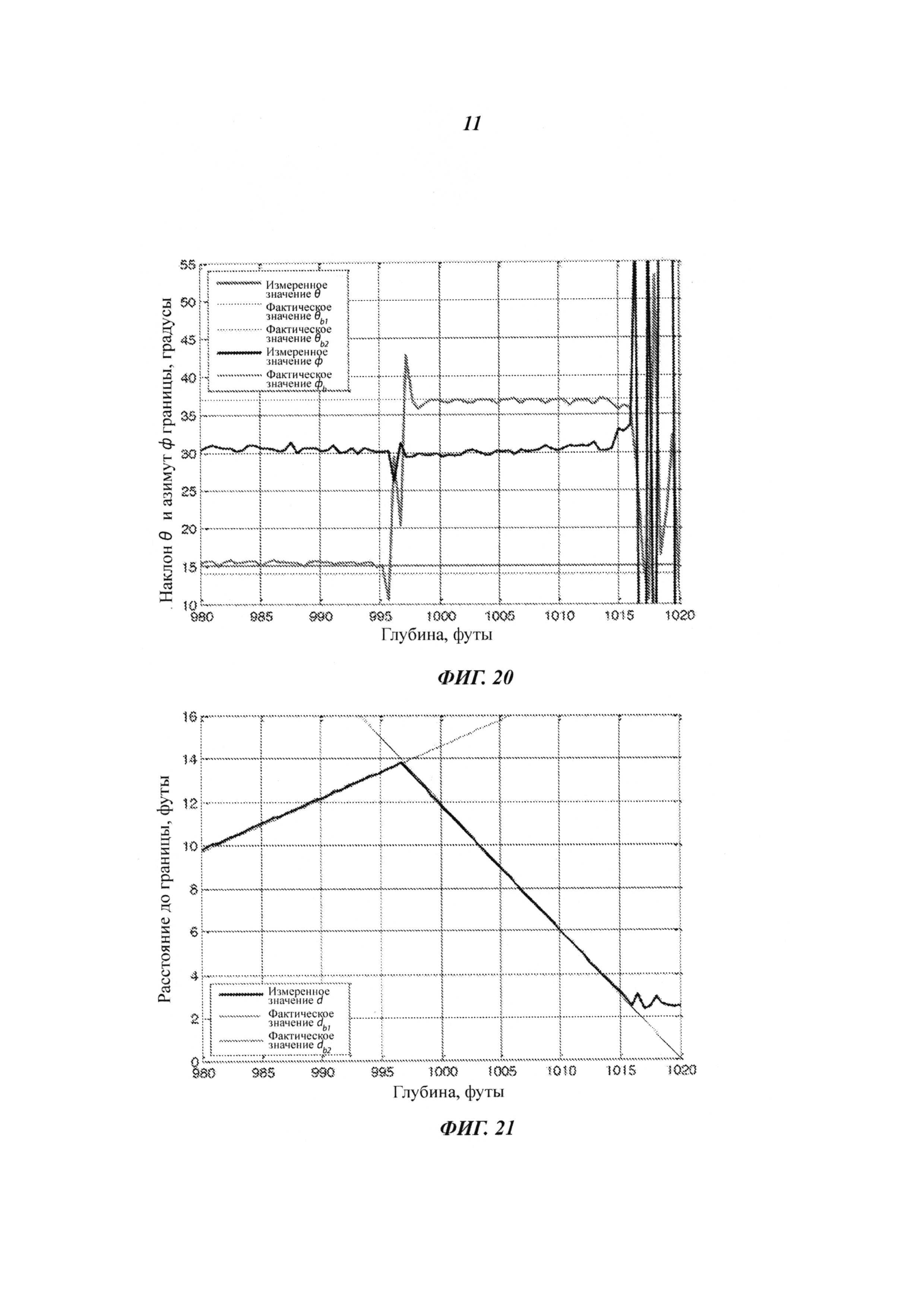
На фиг.20-21 показаны значения расстояния и направления, полученные по ответным сигналам, представленным на фиг.18.
На фиг.22-23 показаны примеры ответных сигналов в виде функции от положения прибора.
На фиг.24-25 показаны значения расстояния и направления, полученные по ответным сигналам, представленным на фиг.23.
Нижеприведенные чертежи и подробное описание конкретных вариантов осуществления системы и способа носят пояснительный характер. Следует понимать, что данные чертежи и подробное описание не накладывают каких-либо ограничений на настоящее изобретение. Напротив, настоящее изобретение охватывает все модификации, эквиваленты и варианты, находящиеся в рамках прилагаемой формулы изобретения.
Осуществление изобретения
В настоящем документе раскрыт скважинный прибор, в котором используется радиолокатор многокомпонентных сигналов, предназначенный для обнаружения аномалий формации (например, границ пласта или других скважин), а также раскрыты системы, способы и применения таких приборов. В некоторых вариантах осуществления изобретения прибор содержит по меньшей мере две антенны, принимающие отраженные сигналы электромагнитных импульсов, передаваемых прибором. Полученные сигналы обрабатываются процессором для выделения отраженных сигналов и определения направлений, в которых расположены источники отраженных сигналов, и/или расстояний до указанных источников. К возможным источникам отраженных сигналов относятся границы формаций, границы флюидов, обсаженные скважины и прочие объекты, вызывающие резкие изменения электромагнитных свойств. Каждая из антенн выполнена с возможностью передачи и приема сигналов, причем антенны могут быть совмещенными для уменьшения размеров прибора и понижения сложности обработки данных. В описанных вариантах изобретения каротажный прибор содержит как электрическую дипольную антенну, так и магнитную дипольную антенну.
По меньшей мере в некоторых вариантах изобретения способ включают в себя следующие этапы: передачу электромагнитных импульсов от прибора в скважине; измерение однокомпонентных и межкомпонентных ответных сигналов электромагнитных импульсов; и определение расстояния до одного или более источников отраженных сигналов и/или направлений, в которых расположены указанные источники отраженных сигналов. Кроме отраженных сигналов измеряемые ответные сигналы могут содержать зарегистрированные прямые сигналы, используемые для определения удельного электрического сопротивления, диэлектрической проницаемости и флюидопроницаемости формации.
Работа и применение предложенных в настоящем изобретении приборов понятны при рассмотрении более крупных систем, в которых они используются. На фиг.1 показан пример системы для выполнения каротажа в процессе бурения (logging while drilling, LWD). На буровой платформе 2 установлена вышка 4, имеющая талевый блок 6 для поднятия и опускания бурильной колонны 8. Указанная бурильная колонна 8 прикреплена к верхнему приводу 10, который вращает бурильную колонну 8 в процессе ее опускания в скважину через устье 12. Бурильная колонна (и/или погружной двигатель) вращает буровое долото 14, которым формируется ствол 16 скважины. Оборудование 18 для циркуляции бурового раствора перекачивает буровой раствор из резервуара 20 для хранения бурового раствора через подающую трубу 22 к верхнему приводу 10, далее во внутреннее пространство бурильной колонны 8, через отверстия в буровом долоте 14, далее на поверхность по кольцевому пространству, расположенному вокруг бурильной колонны 8, через противовыбросовый превентор и обратно в резервуар 20. Буровой раствор транспортирует выбуренную породу из скважины в указанный резервуар 20 и способствует поддержанию целостности скважины.
Забойное оборудование (то есть удаленная часть бурильной колонны 8) содержит толстостенные трубчатые элементы, называемые утяжеленными бурильными трубами, которые увеличивают вес и повышают жесткость, что способствует процессу бурения. Толстые стенки таких утяжеленных бурильных труб являются подходящим местом для размещения в них контрольно-измерительных приборов и средств каротажа в процессе бурения (LWD). Таким образом, забойное оборудование, показанное на фиг.1, содержит блок 24 приборов, содержащий прибор электромагнитного каротажа и контрольно-телеметрический модуль 26.
Данное забойное оборудование также может содержать другие приборы и датчики, предназначенные для сбора информации о параметрах бурения, таких как положение, ориентация, нагрузка на долото, диаметр ствола скважин и т.п. Кроме того, данное забойное оборудование может содержать забойный двигатель и направляющий механизм.
По мере формирования ствола скважины при прохождении долота через формацию блок 24 приборов каротажа в процессе бурения (LWD) вращается и собирает информацию, получаемую радиолокатором многокомпонентных сигналов и сопоставляемую посредством скважинного контроллера с положением прибора и результатами измерения ориентации для создания трехмерной карты формации вокруг скважины. Данные от различных приборов забойного оборудования поступают в контрольно-телеметрический модуль 26 и сохраняются во внутренней памяти. Выбранные фрагменты данных могут быть переданы в приемники 28, находящиеся на поверхности, например, при помощи средств телеметрии по гидроимпульсному каналу связи. Существуют и могут использоваться другие способы телеметрии с применением средств каротажа в процессе бурения. Например, возможно использование средств акустической телеметрии с передачей данных через трубчатую колонну, содержащих дополнительный повторитель 30 для увеличения дальности телеметрической связи. Кроме того, бурильная колонна 8 может содержать проводную бурильную трубу, предназначенную для передачи колебательных сигналов и изображений на поверхность в реальном времени для обеспечения контроля качества и обработки информации в реальном времени для оптимизации разрешающей способности каротажа. Большинство телеметрических систем также может передавать команды с поверхности в контрольно-телеметрический модуль для изменения рабочих параметров каротажных приборов.
Приемники 28 на поверхности передают телеметрические сигналы в компьютерную систему 50 или в другое устройство обработки информации. Компьютер 50 работает на основе программных средств (которые могут храниться на носителях 52 информации) и входных данных, вводимых пользователем через устройство 54 ввода для обработки и декодирования полученных сигналов. Итоговые телеметрические данные далее могут быть проанализированы и обработаны компьютером 50 с последующей визуализацией полезной информации на компьютерном мониторе 56 или на другом устройстве отображения информации.
Например, оператор буровой установки может использовать данную систему для получения карты границ формации или существующих скважин, расположенных вблизи забойного оборудования. Оператор буровой установки может использовать вращающуюся направляющую систему или направляющие лопатки для наведения бурильного узла и формирования ствола скважины по требуемой траектории относительно границ формации или существующих скважин.
Ориентация забойного оборудования может быть задана углом направления торца прибора (углом поворота), углом наклона (зенитным углом) и горизонтальным углом (азимутальным направлением). Как известно из существующего уровня техники, угол наклона представляет собой угол отклонения, отсчитываемый от вертикали вниз, горизонтальный угол представляет собой угол в горизонтальной плоскости, отсчитываемый от направления на истинный север, а угол направления торца прибора представляет собой угол ориентации (угол поворота вокруг оси прибора), отсчитываемый от верхней стороны скважины. Ввиду того, что в вертикальной скважине отсутствует «верхняя сторона», угол поворота в таких скважинах отсчитывается от направления истинного севера. По этой причине угол поворота часто называют «азимутом» даже в наклонных скважинах. Каждый из углов, определяющих ориентацию забойного оборудования, может быть определен по результатам измерений посредством магнитометров, инклинометров и/или акселерометров, причем, в качестве альтернативного варианта, возможно использование других измерительных устройств, в том числе гироскопов. В одном из вариантов изобретения прибор содержит 3-осевой феррозондовый магнитометр и 3-осевой акселерометр. Как известно из существующего уровня техники, сочетание двух таких измерительных систем позволяет определить угол направления торца прибора, угол наклона и азимутальное направление. Узел приборов каротажа в процессе бурения (LWD) может содержать модуль позиционирования и ориентации, получающий результаты измерения параметров ориентации и объединяющий их с результатами гироскопических и инерциальных измерений для точного слежения за положением и ориентацией прибора.
Электронные средства прибора электромагнитного каротажа помещены внутри утяжеленных бурильных труб, а антенны расположены снаружи указанных труб, обычно в углублении на поверхности утяжеленных бурильных труб, как показано в примерах на фиг.2. Указанное углубление может быть заполнено непроводящей смолой, обеспечивающей опору для антенн и их защиту. В качестве альтернативы или в дополнении, над антеннами расположена защитная крышка. Данная крышка может быть выполнена из проводящего материала и может содержать отверстия для пропускания и/или приема электромагнитных волн.
Как видно на фиг.3, ориентация рамочной антенны может быть задана углом наклона ξ и азимутом α. Угол наклона ξ измеряют между продольной осью прибора и нормальным вектором N к плоскости антенны. Азимут α лежит в плоскости, перпендикулярной продольной оси прибора, причем его измеряют между меткой торца прибора и проекцией на эту плоскость нормального вектора N к плоскости антенны.
Прибор 110 (фиг.2) содержит группу из трех совмещенных антенн 112, 114, 116, имеющих углы наклоны приблизительно 54,7° и повернутых относительно друг друга на азимут 120° для обеспечения ортогональности. Такой прибор может осуществлять регистрацию полного набора однокомпонентных и межкомпонентных сигналов, используемых для формирования ответного сигнала произвольно ориентированной антенны. Однако изготовление такой тройной конфигурации антенн сопряжено с определенными трудностями, которые могут быть преодолены путем применения двойной системы антенн, например имеющейся в приборе 100. Прибор 100 содержит две антенны 102, 104, имеющие угол наклона в 45° и повернутые относительно друг друга на противоположные азимуты для обеспечения ортогональности. Согласно информации, приведенной в одновременно находящейся на рассмотрении патентной заявке US 12/294557 под названием «Измерительный прибор с поворотной антенной для регистрации многокомпонентных сигналов на основе определения элементов матрицы связи», по результатам измерений, выполненных в процессе вращении указанных двух антенн, при определенных допущениях, будут получены все однокомпонентные и межкомпонентные сигналы. Если взаимное расположение антенн признается нежелательным, то изготовитель может использовать конфигурацию прибора 120, в которой антенны 122, 124 пространственно разнесены, но при этом процесс обработки сигналов и решения обратной задачи может усложниться.
По мере вращения прибора и перемещения его по стволу скважины данный прибор осуществляет измерения и сопоставляет результаты измерения с положением в скважине и азимутом. Близкие значения положений и углов могут быть сгруппированы в «ячейки», а для улучшения точности измерения результаты измерения в каждой ячейке могут быть усреднены или объединены иным способом. На фиг.4 показан пример деления окружности скважины на N угловых ячеек. Значение N обычно больше 8 и может исчисляться сотнями.
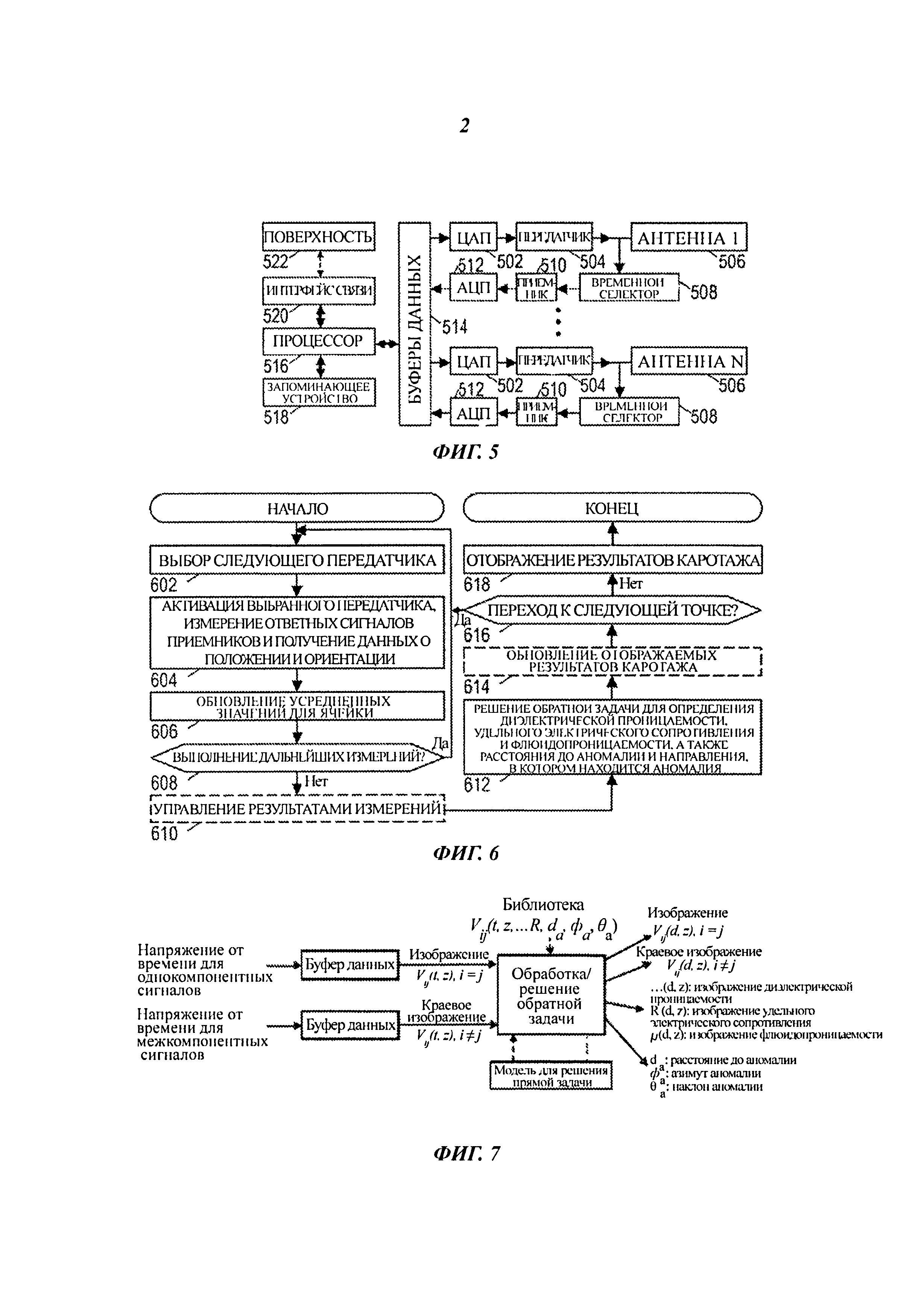
На фиг.5 показана структурная схема электронных средств прибора электромагнитного каротажа согласно одному из вариантов изобретения, проиллюстрированного в качестве примера. Цифроаналоговые преобразователи 502 выдают аналоговые сигналы для передатчика при получении сигнала запуска или, в некоторых случаях применения, цифрового волнового сигнала. Каждый передатчик 504 осуществляет повышение частоты и усиление сигналов, а также согласование полного сопротивления для обеспечения эффективного управления соответствующей антенной 506. Антенны 506 испускают электромагнитные волны через формацию и/или принимают электромагнитные волны из формации. Для защиты чувствительных электронных средств приемников временные селекторы 508 отделяют антенну 506 от приемника 510, когда соответствующий передатчик управляет антенной. В свою очередь, приемники 510 осуществляют усиление, фильтрацию, понижение частоты и регулирование коэффициента усиления для соответствующей подготовки сигналов приемника к их последующей оцифровке аналого-цифровыми преобразователями 512. Буферы 514 данных обеспечивают одновременную работу нескольких приемников и передатчиков, при этом на процессор 516 прибора не накладываются чрезмерно жесткие эксплуатационные требования. Процессор 516 записывает требуемые параметры измерения в соответствующий буфер 514 (например, для выбора конкретной антенны в качестве передающей антенны, для задания требуемых значений амплитуды, частоты сигнала и длительности импульсов, а также для задания требуемого интервала для записи) и после соответствующей задержки собирает данные оцифрованных волновых сигналов, поступающие от требуемых приемных антенн. Указанный процессор способен хранить данные измерений в запоминающем устройстве 518, при необходимости обрабатывать эти данные и передавать их через интерфейс 520 связи по телеметрическому каналу в систему сбора данных, расположенную на поверхности.
По меньшей мере в некоторых вариантах изобретения антенны 506 являются совмещенными многокомпонентными антеннами. Антенны, показанные на фиг.2, представляют собой рамочные («магнитные дипольные») антенны, однако также возможно использование ортогонально ориентированных электрических дипольных антенн. Такие антенны могут быть применены или аппроксимированы посредством соответствующим образом расположенных электродов, проводников, тороидов или рупорных антенн. Вообще, процессор 516 управляет передачей, получением и обработкой команд для N совмещенных дипольных антенн, имеющих линейно независимые ориентации для регистрации данных в нескольких поляризациях. Возможно использование наклонных, ненаклонных, электромагнитных дипольных магнитных антенн и/или магнитометров. Диполи антенны могут иметь взаимно ортогональные ориентации для оптимизации направленности или анизотропии чувствительности прибора. Результаты измерений, полученные посредством антенн, имеющих различные ориентации, могут быть объединены для получения данных, которые были бы получены антеннами с иными ориентациями. Кроме того, для получения данных, соответствующих иным ориентациям, можно предусмотреть вращение бурильной колонны. В некоторых вариантах изобретения прибор имеет антенны, расположенные в разных местах вдоль бурильной колонны для улучшения дальности и разрешающей способности каротажа.
На фиг.6 проиллюстрирован способ каротажа, осуществляемый с использованием процессора 516, наземного вычислительного блока 522 или одновременно обоих указанных устройств. На этапе 602 выбирают исходный передатчик. На этапе 604 активируют выбранный передатчик, и от каждого приемника получают ответный цифровой волновой сигнал. К числу используемых волновых сигналов относятся отдельные прямоугольные, треугольные или колоколообразные импульсы. Кроме того, возможно использование импульсов с линейной частотной модуляцией и других импульсов с модулированной несущей частотой. Для улучшения значений отношения сигнал-шум можно использовать повторяющиеся импульсы, а также радиолокационные сигналы с модулированными незатухающими волнами. Применяемые значения ширины импульса лежат в диапазоне от 100 пс до 1 мкс, причем предпочтительными значениями являются значения ниже 100 нс. Также можно использовать другие значения ширины импульса. Когда приемопередатчик находится в режиме приема и активирован соответствующий временной селектор, сигнал, получаемый от антенны, передают в буфер данных. При возбуждении i-го передатчика все приемники, кроме i-го, начинают получать данные. В принципе, на данном этапе также можно начать получать данные от i-го приемника, однако по меньшей мере в некоторых вариантах изобретения предусматривают задержку записи данных в i-й приемник, пока паразитный переходный процесс в данной антенне после передачи сигнала не будет завершен или паразитные колебания сигнала в данной антенне после передачи сигнала не станут пренебрежимо малы. После нахождения в режиме приема в течение необходимого интервала времени все приемники могут быть выключены.
На этапе 604 также получают данные о положении и ориентации прибора, которые используют для соотнесения результатов измерений, полученных приемниками, с азимутальной ячейкой (азимутальная ячейка имеет протяженность вдоль лучей угла и протяженность вдоль оси). На этапе 606 текущие результаты измерений используют для обновления усредненных значений данных ответных сигналов для каждого приемника рассматриваемой ячейки.
На этапе 608 выполняют проверку для определения, требуются ли и ожидаются ли дополнительные измерения в текущем положении в стволе скважины. Например, касательно приборов, имеющих группу передатчиков, целесообразно наличие результатов измерений сигналов от каждого передатчика. К другим причинам, по которым может потребоваться проведение дополнительных измерений, относится необходимость наличия заданного количества результатов измерений для каждой азимутальной ячейки до выполнения дополнительной обработки данных или необходимость наличия по меньшей мере заданного количества результатов измерений для различных азимутов до выполнения дополнительной обработки данных. Если в текущем положении ожидается осуществление дополнительных измерений, дополнительная обработка данных может быть отложена, пока не будут собраны все необходимые результаты измерений. Предложенный способ предусматривает повторение этапов 602-608 до тех пор, пока не будет получено достаточное количество результатов измерений.
После получения достаточного количества результатов измерений в рассматриваемом положении в стволе скважины в рамках предложенного способа переходят к необязательному этапу 610, на котором осуществляют предварительную обработку данных. Например, на этапе 610 посредством процессора объединяют результаты измерений, полученные от разных приемников, для формирования результатов измерения от виртуальной антенны, которой могут управлять для достижения максимальной чувствительности в любом заданном направлении, или же результаты измерений можно обрабатывать для компенсации отклонений параметров электронных средств прибора.
На этапе 612 посредством указанной системы результаты измерений, полученные прибором, обрабатывают для определения диэлектрической проницаемости, удельного электрического сопротивления и флюидопроницаемости формации, а также расстояния до аномалий формации, например, до границы формации, границы флюида, разрыва или иного рода пустоты в формации, существующей скважины или любого другого близлежащего подземного объекта, вызывающего резкое изменение электромагнитного поля, и направлений, в которых находятся указанные аномалии. Также возможно определение электромагнитных свойств аномалии (например, удельного электрического сопротивления, диэлектрической проницаемости и флюидопроницаемости). Ниже описаны конкретные алгоритмы решения обратной задачи, показывающие простоту получения параметров на основе сигналов приемников, однако возможно использование любых стандартных процедур решения обратной задачи по нахождению свойств формации, в том числе поиск соответствия в библиотеках, а также итерационное моделирование путем решения прямой задачи. На этапе 614 возможно обновление отображаемых данных в реальном времени для представления актуальных результатов измерений. На этапе 616 выполняют проверку для определения, требуется ли продолжение процесса каротажа. Если продолжение требуется, осуществляют возврат на этап 602, в противном случае осуществляют переход на этап 618, на котором система отображает результаты каротажа пользователю. К рассматриваемым результатам каротажа относятся изображения отраженных однокомпонентных электромагнитных сигналов; (краевые) изображения отраженных межкомпонентных электромагнитных сигналов; изображения диэлектрической проницаемости/удельного электрического сопротивления/флюидопроницаемости аномалий, изображения азимута/угла наклона аномалий; и каротажные данные о диэлектрической проницаемости/удельном электрическом сопротивлении/флюидопроницаемости. Каротажные данные также могут иметь вид объемного изображения пространства вокруг скважины или вид графика одного или более свойств формации в виде функции от положения прибора и его ориентации в стволе скважины. Возможно использование других известных способов отображения каротажных данных.
Сбор данных можно повторять в различных точках по длине скважины. Данные волнового сигнала, полученные на различных глубинах z, могут иметь вид напряжения Vij(t, z), где нижние индексы i и j обозначают номер соответствующего передатчика и приемника, a t обозначает время, измеренное от момента активации передатчика. Также можно использовать электрический ток, мощность или другие переменные параметры регистрируемых волновых сигналов. Напряжение Vij(t, z) может в тексте описания иногда называться изображением, поскольку зависит от двух параметров (время t и глубина z). Как показано на фиг.7, данные о напряжении однокомпонентного сигнала (то есть при i=j) обычно показывают функции произвольных скачков диэлектрической проницаемости ε, флюидопроницаемости µ или удельного электрического сопротивления ρ. Данные о напряжении межкомпонентного сигнала (то есть при i≠j) обычно показывают функции объектов, характеризующихся падением или наличием краев, с диэлектрической проницаемостью ε, флюидопроницаемостью µ или удельным электрическим сопротивлением ρ при условии, что ориентация диполей приблизительно ортогональна, а среда формации изотропна.
На данном этапе изображения можно отображать или, как показано на фиг.7, подвергать дальнейшей обработке или преобразованию с решением обратной задачи для получения улучшенных изображений напряжения или изображений диэлектрической проницаемости/удельного электрического сопротивления в виде функции от расстояния d и глубины z. Там, где это применимо, в результате решения обратной задачи можно получать параметры, связанные с аномалиями, такие как расстояние da до аномалии и направление, в котором находится аномалия (то есть азимут ϕа и угол наклона θа). Решение обратной задачи можно выполнять путем сравнения данных волнового сигнала с предварительно откомпилированными ответными сигналами напряжения из библиотеки или путем применения итерационной модели для решения прямой задачи с целью нахождения параметров модели, которые выдают прогнозируемый ответный сигнал, в наибольшей степени соответствующий фактическим результатам измерений. Библиотека может содержать такие параметры как данные о времени, данные о глубине, диэлектрическая проницаемость/удельное электрическое сопротивление окружающей среды, расстояние до аномалии, азимут аномалии или наклон аномалии. Количество параметров, содержащихся в библиотеке, может зависеть от гибкости, требуемой для решения конкретных задач. В задачах, для решения которых недостаточно набора параметров, содержащихся в библиотеке, диэлектрическая проницаемость, флюидопроницаемость, удельное электрическое сопротивление или изображения напряжения все равно могут представлять достаточную информацию о параметрах аномалий при визуальном осмотре. Например, пиковые значения отраженного сигнала могут давать косвенную информацию о расстоянии, даже если точные результаты измерений расстояния недоступны.
В силу многокомпонентной структуры прибора разные передатчики могут испускать электромагнитные волны с разной поляризацией, при этом в полученных данных сигнала может формироваться зависимость от направления. В результате, посредством волновых сигналов Vij(t, z) можно выявить направление, в котором находится аномалия. Например, предположим, что многокомпонентные данные получены от ортогональной группы диполей Vij(t, z), i=1, 2, 3, j=1, 2, 3. Тензор данных в каждый момент времени и для каждой глубины может быть записан следующим образом:

В слоистой изотропной среде спектральное разложение данной матрицы имело бы (по меньшей мере приблизительно) следующий вид:

где s и s⊥ - константы, пропорциональные коэффициентам отражения, связанным с диполями, параллельными и перпендикулярными границе слоя соответственно. В данном случае  представляет собой собственный вектор, связанный с характеристическим числом s⊥ и равный нормальному вектору границы слоя. При объединении с данными об ориентации антенн прибора вектор
представляет собой собственный вектор, связанный с характеристическим числом s⊥ и равный нормальному вектору границы слоя. При объединении с данными об ориентации антенн прибора вектор  характеризует азимут и наклон границы слоя относительно указанного прибора. Изображения азимута и наклона могут быть сформированы по полученным значениям азимута и наклона в каждой точке (t, z). Данные изображения указывают приблизительное направление, в котором находится источник сигнала, с наибольшим вкладом в каждое значение напряжения Vij(t, z). При решении задачи для единственного слоя возможно однозначное определение положения границы слоя в каждой отдельно взятой точке глубины. Аналогично, при наличии линейного (одномерного) рассеивателя (например, обсадной трубы находящейся вблизи скважины) спектральное разложение матрицы (1) принимает вид:
характеризует азимут и наклон границы слоя относительно указанного прибора. Изображения азимута и наклона могут быть сформированы по полученным значениям азимута и наклона в каждой точке (t, z). Данные изображения указывают приблизительное направление, в котором находится источник сигнала, с наибольшим вкладом в каждое значение напряжения Vij(t, z). При решении задачи для единственного слоя возможно однозначное определение положения границы слоя в каждой отдельно взятой точке глубины. Аналогично, при наличии линейного (одномерного) рассеивателя (например, обсадной трубы находящейся вблизи скважины) спектральное разложение матрицы (1) принимает вид:

где s⊥ - константа, пропорциональная коэффициенту отражения, связанному с линейной аномалией. В данном случае
представляет собой собственный вектор, связанный с характеристическим числом s⊥. и лежащий в плоскости, пересекающей линейную аномалию и приемопередатчик. В отличие от случая с несколькими слоями (2) в данном случае собственный вектор
сам по себе не может указывать направление, в котором находится линейная аномалия. Однако при добавлении к нему информации из нескольких результатов измерений искомое направление может быть установлено путем пересечения результирующих плоскостей.
В вышеизложенном описании приведены примеры реализации настоящего изобретения, позволяющие определить направление, в котором находится аномалия, без необходимости предварительного обращения волновых сигналов во временной области. В случаях, когда желательно иметь точные результаты измерения расстояния до аномалии, требуется преобразование оси времени изображений в ось расстояния. Ввиду того, что значения диэлектрической проницаемости, удельного электрического сопротивления и флюидопроницаемости могут характеризоваться частотной зависимостью, которая может усложнить расчет расстояния, данная частотная зависимость может быть устранена путем априорной коррекции данных. Одним из методов осуществления такой коррекции является выполнение преобразования Фурье с переводом данных волнового сигнала в частотную область, введение частотно-зависимого множителя, основанного на известной, измеренной или предполагаемой частотной зависимости и, затем, перевод произведения снова во временную область. Хотя такая коррекция может быть полезной, во многих случаях она может не потребоваться.
С коррекциями для частотной дисперсии или без коррекций для частотной дисперсии данные изображения во временной области обращаются или путем нахождения наилучшего соответствия в библиотеке, или путем использования метода итерационного моделирования с решением прямой задачи для нахождения модели, прогнозируемые ответные сигналы которой соответствуют результатам измерений. Исходные параметры модели содержат значения диэлектрической проницаемости, удельного электрического сопротивления и флюидопроницаемости окружающей среды. Обращенные значения удельного электрического сопротивления и диэлектрической проницаемости могут быть изотропными или анизотропными. При необходимости коррекцию для частотной дисперсии можно осуществлять на этапе решения обратной задачи, при этом обращенные параметры также могут являться функциями от частоты. Для определения свойств формации, находящейся в непосредственной близости к прибору, данные волновых сигналов можно собирать выборочно, чтобы учитывались только временные интервалы, начинающиеся после окончания передачи импульсов и заканчивающиеся до получения четких ответных сигналов. После получения значений диэлектрической проницаемости, удельного электрического сопротивления и флюидопроницаемости формации для рассматриваемого импульса вычисляют действующую скорость волны v(t). Ввиду того, что при регистрации отраженного волнового сигнала во временной области распространение указанного сигнала занимает двойное время, вычисленная скорость перед использованием для преобразования оси времени в ось расстояния делится пополам. Расстояния до аномалий, выявленных по пикам волнового сигнала, означающим момент отражения, можно рассчитать как  , где tp - момент времени пика, регистрируемого в приемнике. При этом каждое значение напряжения Vij(t, z) связывается с приблизительным расстоянием до источника сигнала, характеризующегося наибольшим вкладом в это значение напряжения. В слоистых средах отражение от аномалии обычно сопровождается локальными флуктуациями уровня сигнала, причем максимум этих флуктуации наблюдается на расстоянии, равном кратчайшему расстоянию от приемопередатчика до границы слоя. В случаях, когда поле отраженных волн заслонено полем прямых волн, для уменьшения влияния поля прямых волн возможно применение фильтрации.
, где tp - момент времени пика, регистрируемого в приемнике. При этом каждое значение напряжения Vij(t, z) связывается с приблизительным расстоянием до источника сигнала, характеризующегося наибольшим вкладом в это значение напряжения. В слоистых средах отражение от аномалии обычно сопровождается локальными флуктуациями уровня сигнала, причем максимум этих флуктуации наблюдается на расстоянии, равном кратчайшему расстоянию от приемопередатчика до границы слоя. В случаях, когда поле отраженных волн заслонено полем прямых волн, для уменьшения влияния поля прямых волн возможно применение фильтрации.
В рассматриваемом рабочем режиме предлагаемого прибора происходит быстрое затухание прямого (собственного) сигнала от передатчика после фазы передачи сигнала, причем ожидается, что данный сигнал и отраженные от аномалии сигналы в большинстве случаев оказываются разделенными во времени. В нижеприведенных примерах пик полученного сигнала считается зарегистрированным только в том случае, если он превышает заданную процентную величину от уровня прямого сигнала. В данном случае указанную процентную величину выбирают равной 10%. Вторым критерием обнаружения для этих примеров является абсолютный уровень отраженного сигнала. Пики сигнала приемника считаются обнаруженными, если они превышают значение, составляющее 5×10-9 от уровня пика прямого сигнала. Еще лучшие эксплуатационные характеристики прибора могут быть достигнуты путем снижения уровня прямого сигнала, что может быть осуществлено путем фильтрации затухающей части прямого сигнала. Для этого может быть выполнен поиск формы функции затухающего сигнала на основе предыдущих временных интервалов с последующим вычитанием этой функции затухающего сигнала на следующих временных интервалах. В конечном итоге, для обнаружения аномалий информация о направлении, полученная из выражений (1)-(3), может быть объединена с информацией о расстоянии.
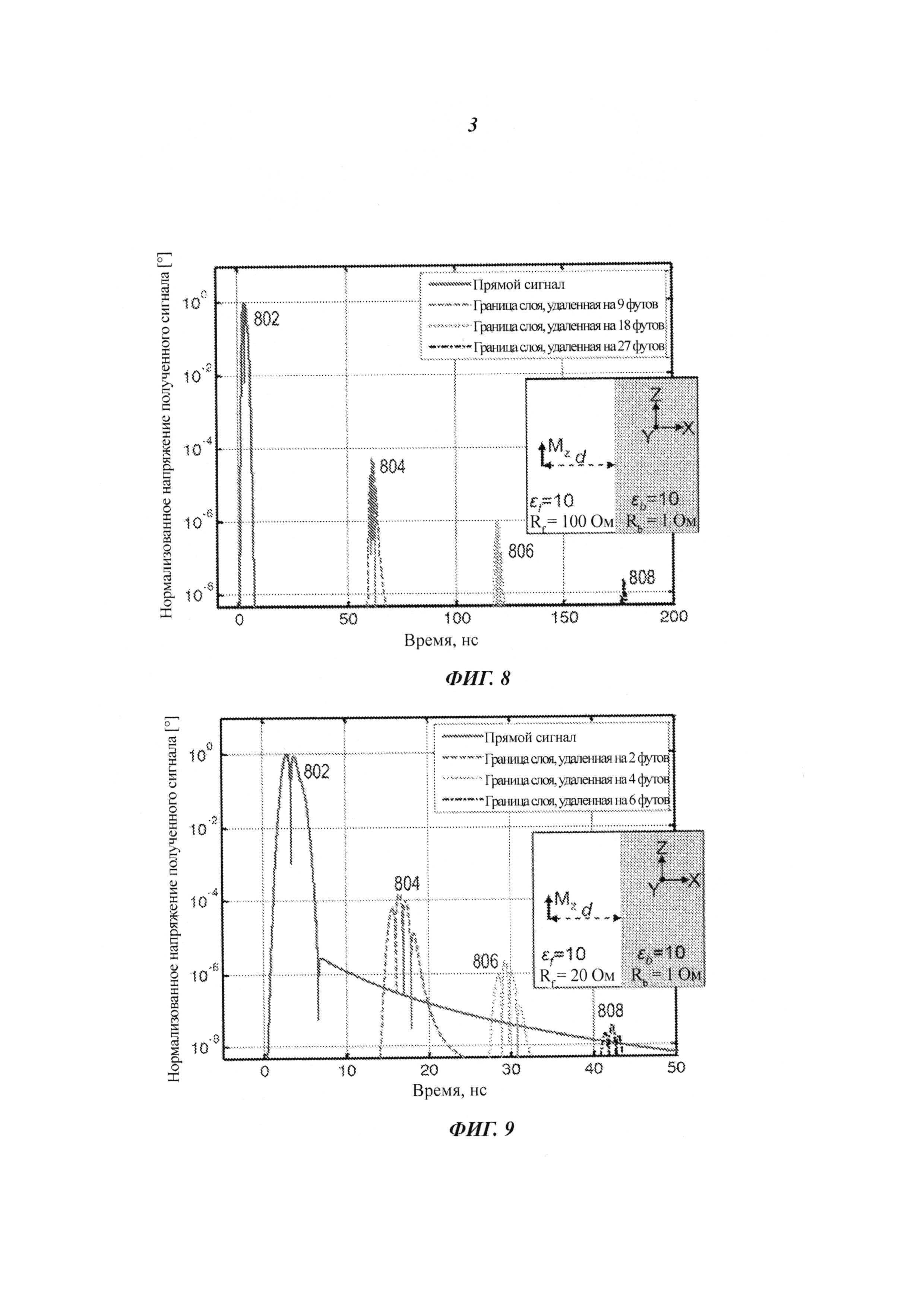
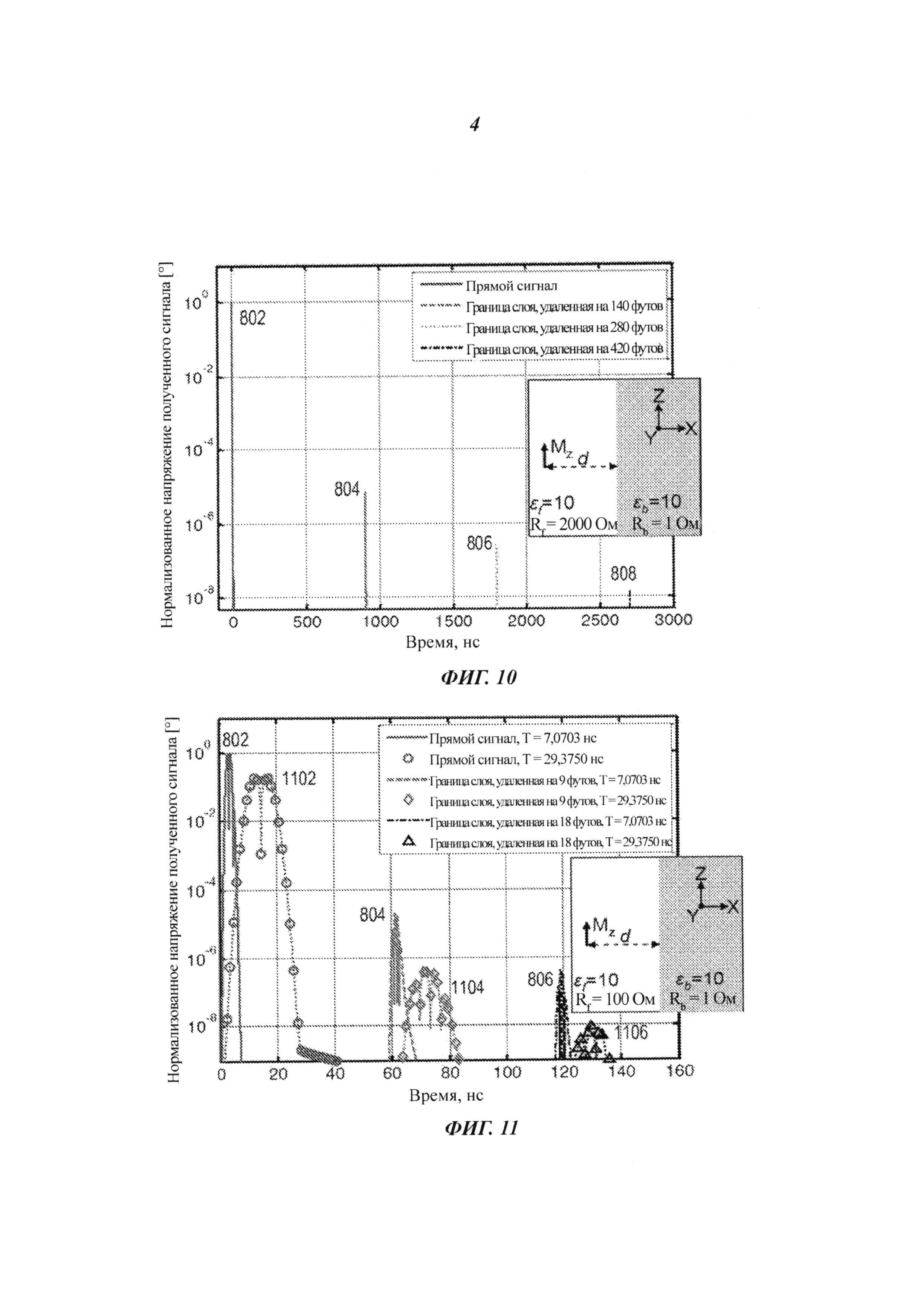
На фиг.8 показано напряжение Vzz(t), измеренное прибором с Z-приемопередатчиком с дипольной антенной в двухслойной формации, геометрические параметры которой приведены на выносном элементе. Показаны амплитуда прямого сигнала, а также амплитуда отраженного сигнала для границы, находящейся на одном из следующих расстояний: 9 футов (2,74 м), 18 футов (5,49 м) и 27 футов (8,23 м). Формация, находящаяся в непосредственной близости к прибору, имеет относительную диэлектрическую проницаемость εf=10 и удельное электрическое сопротивление Rf=100 Ом·м, причем на границе формации относительная диэлектрическая проницаемость εf=10, а удельное электрическое сопротивление Rb=1 Ом·м. В данном примере выбранная ширина импульса составляет 7,0704 нс, а ожидаемая разрешающая способность по дальности составляет примерно 0,5 фута (0,15 м). Под разрешающей способностью в данном случае понимают наименьшее пространственное разделение между двумя слоями, отличимое посредством передаваемого импульса. Максимальное значение напряжения полученного сигнала нормализовано до 1. На фиг.8 линия 802 обозначает прямой сигнал, а линии 804, 806, 808 обозначают соответственно сигналы, отраженные от границы слоя на расстояниях 9 футов (2,74 м), 18 футов (5,49 м) и 27 футов (8,23 м). Как показано на чертеже, отраженные сигналы на каждой из указанных глубин четко отделены по времени от прямого сигнала и друг от друга. Значению относительного порогового уровня 5×10-9 соответствует глубина обнаружения приблизительно 30 футов (9,14 м). На фиг.9 и 10 приведены схожие графики для различных значений удельного электрического сопротивления формации: Rf=20 Ом·м и Rf=2000 Ом·м соответственно. Расчетные ожидаемые глубины обнаружения в указанных случаях составляют 6 футов (1,83 м) и 450 футов (137,16) соответственно. При сравнительном анализе данных графиков видно, что при увеличении электрической проводимости формации после окончания импульсной передачи наблюдается эффект паразитных колебаний сигнала. Паразитные колебания сигнала в каждом из указанных случаев имеют меньшую амплитуду, нежели уровни отраженных сигналов, и не оказывают значительного влияния на глубину обнаружения.
На фиг.11 проиллюстрировано сравнение сигналов, показанных на фиг.8, с сигналами, которые были бы созданы при ширине импульса 29,375 нс, при прочих равных условиях. Кривая 1102 обозначает прямой сигнал; кривая 1104 обозначает сигнал, отраженный от границы, удаленной на 9 футов (2,74 м); кривая 1106 обозначает сигнал, отраженный от границы, удаленной на 18 футов (5,49 м). Большая ширина импульса соответствует ожидаемой разрешающей способности по дальности, равной примерно 2 фута (0,61 м) (для сравнения, небольшая ширина импульса соответствует разрешающей способности по дальности приблизительно 0,5 фута (0,15 м)). При большей ширине импульса амплитуда отраженных сигналов относительно прямого сигнала уменьшена на 10%, при этом имеется более выраженный эффект паразитных колебаний (то есть затухание длится дольше) прямого сигнала. По результатам этого сравнения можно сделать вывод, что целесообразнее использовать импульсы с малой шириной.
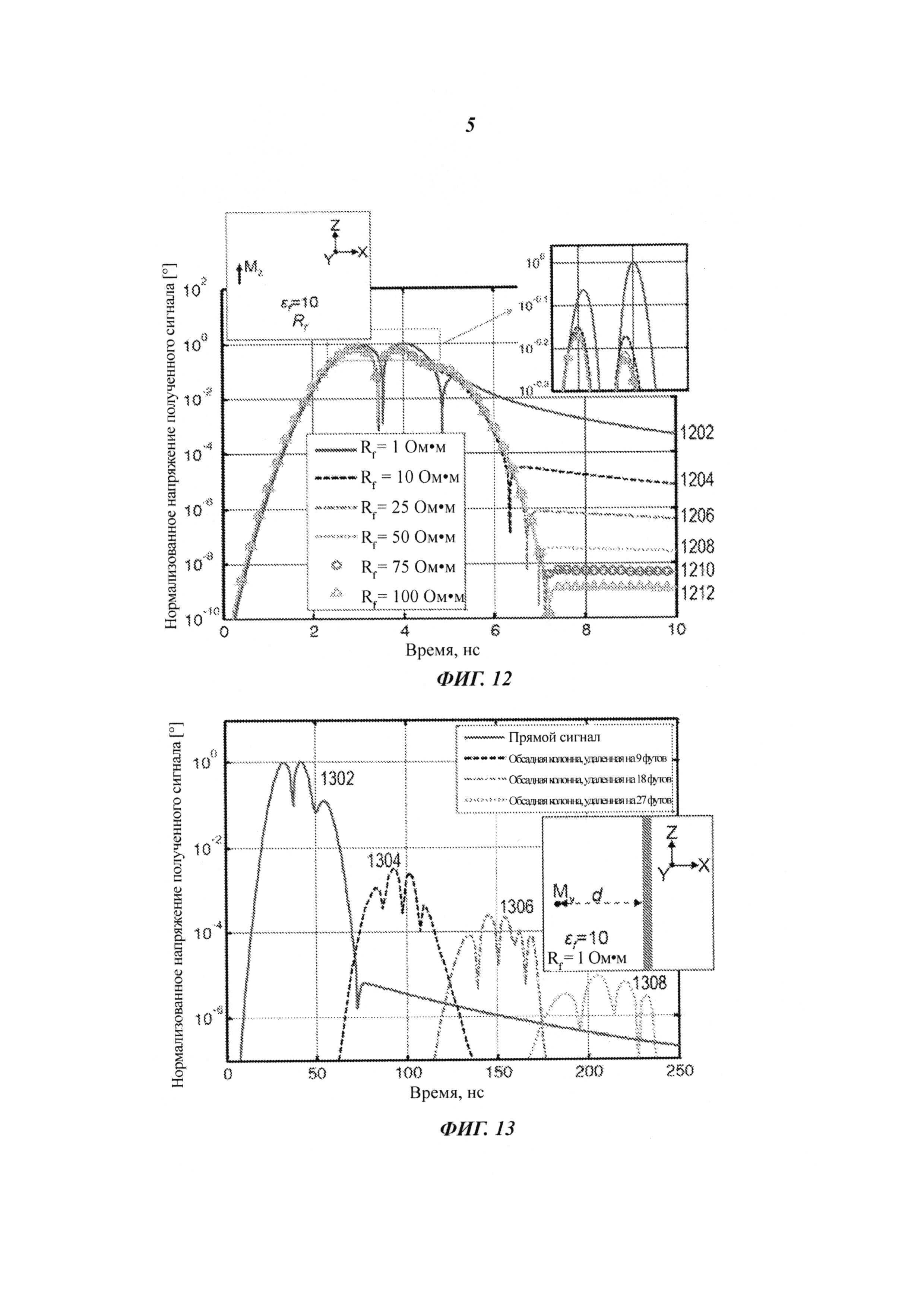
На фиг.12 проиллюстрировано влияние удельного электрического сопротивления формации на прямой сигнал Z-приемопередатчика с дипольной антенной. Кривые 1202-1212 соответствуют сигналам для значений электрического удельного сопротивления формации, равных 1 Ом·м, 10 Ом·м, 25 Ом·м, 50 Ом·м, 75 Ом·м и 100 Ом·м. На фиг.12 показано, что значение электрического удельного сопротивления оказывает на напряжение полученного сигнала по окончании импульса (t=7,0704 нс) большое влияние. На выносном элементе также показано, что чувствительность в процессе передачи импульса ограничена в большей степени. Фиг.12 иллюстрирует, что наиболее эффективный способ определения удельного электрического сопротивления формации, находящейся в непосредственной близости к прибору, состоит в обработке зарегистрированного сигнала по окончании передаваемого импульса, хотя удельное электрическое сопротивление может быть также получено из значений напряжения в процессе передачи сигналов, если прибор способен осуществлять прием и передачу сигнала одновременно.
На фиг.13 показан ожидаемый ответный сигнал прибора при обнаружении существующей обсадной колонны (с высокой электрической проводимостью) скважины, находящейся в формации, имеющей относительную диэлектрическую проницаемость εf=10 и удельное электрическое сопротивление Rf=1 Ом·м. Диаметр обсадной колонны составляет 8 дюймов (20,32 см), причем предполагается, что обсадная колонна имеет протяженность более 500 футов (152,4 м) в обоих направлениях вдоль оси, параллельной оси Z прибора, при этом магнитная дипольная антенна направлена вдоль оси Y. Прибор передает импульсы колоколообразной формы с длительностью 7,0703 нс. Кривая 1302 обозначает прямой сигнал; кривая 1304 обозначает сигнал, отраженный от обсадной колонны, находящейся на расстоянии 9 футов (2,74 м); кривая 1306 обозначает сигнал, отраженный от обсадной колонны, находящейся на расстоянии 18 футов (5,49 м);
кривая 1308 обозначает сигнал, отраженный от обсадной колонны, находящейся на расстоянии 27 футов (8,23 м). На фиг.13 показано, что уровень и характер изменения отраженных сигналов в данном случае аналогичны уровню и характеру изменения сигналов, отраженных от плоских границ, удаленных на аналогичные расстояния. Авторы полагают, что все вышеописанные принципы, используемые для обнаружения и отслеживания плоских границ, могут с небольшими изменениями применяться для обнаружения и отслеживания обсаженных скважин. Существенное отличие состоит в том, что оптимальное возбуждение электромагнитного поля в обсаженной колонне вызывается, когда диполь расположен нормально к поверхности, содержащей этот диполь и обсадную колонну (как следует из уравнения (3)). Отраженные сигналы превышают по амплитуде как прямой сигнал, так и относительный уровень шума 5·10-9 для всех рассматриваемых расстояний. Расчетная глубина обнаружения в данном случае составляет более 40 футов (12,19 м). Соответственно, прибор может использоваться при бурении с пересечением существующей скважины, бурении с обходом существующей скважины или бурении в направлении, параллельном существующей скважине.
На фиг.14 показана зависимость ожидаемой глубины обнаружения плоской границы от удельного электрического сопротивления формации. Принятая модель приведена на выносном элементе. В соответствии с этой моделью формация, в которой находится прибор, имеет диэлектрическую проницаемость εf=10 и удельное электрическое сопротивление Rf, при этом граничащая с ней формация имеет диэлектрическую проницаемость εf=10 и удельное электрическое сопротивление Rb=1 Ом·м. Заданная ширина импульса составляет 7,0704 нс. Как и в остальных опытах, факт обнаружения считается действительным только при поступлении отраженного от границы сигнала, амплитуда которого превышает значение, составляющее 5×10-9 от уровня пика прямого сигнала, и превышает уровень, составляющий 10% от амплитуды прямого сигнала в момент получения этого отраженного сигнала. На фиг.14 показано, что глубина обнаружения увеличивается почти прямо пропорционально удельному электрическому сопротивлению.
На фиг.15 проиллюстрирована глубина обнаружения, связанная с приемопередатчиками с электрической и магнитной дипольными антеннами, ориентированными в направлениях Х и Z. Прибор находится в слое, имеющем относительную диэлектрическую проницаемость εf=10 и удельное электрическое сопротивление Rf=100 Ом·м. Данный слой граничит со слоем, имеющим относительную диэлектрическую проницаемость εf=10 и удельное электрическое сопротивление Rb=1 Ом·м. Заданная ширина импульса составляет 7,0704 нс. На фиг.15 показана зависимость расстояния обнаружения от угла 6 падения. Расстояние отсчитывается от приемопередатчика до ближайшей точки, лежащей на границе указанных слоев. На фиг.15 показано, что электрический и магнитный диполи характеризуются абсолютно одинаковой глубиной обнаружения, что обуславливается, главным образом, дуалистической природой распространения волн электрического и магнитного поля. Для дипольной антенны, ориентированной параллельно плоскости, наблюдаемая глубина обнаружения составляет 30 футов (9,14 м). Указанная глубина уменьшается до 17 футов (5,18 м) при изменении ориентации антенны на перпендикулярную относительно плоской границы. Таким образом, можно утверждать, что Х-приемопередатчик в большей степени подходит для обнаружения границ, находящихся перед буровым долотом, a Z-приемопередатчик в большей степени подходит для отслеживания границ, находящихся в стороне от бурильной колонны.
На фиг.16 показана зависимость угла падения от глубины обнаружения при разных значениях удельного электрического сопротивления формации. Приведены кривые для трех различных значений удельного электрического сопротивления: Rf=20 Ом·м, 100 Ом·м, 2000 Ом·м, причем в каждом из этих случаев граничащий с данной формацией слой имеет относительную диэлектрическую проницаемость εf=10 и удельное электрическое сопротивление Rb=1 Ом·м. Заданная ширина импульса составляет 7,0704 нс, используется Х-приемопередатчик с дипольной антенной. С увеличением удельного электрического сопротивления глубина обнаружения увеличивается, однако при высоких значениях угла падения наблюдается более значительный процент потерь.
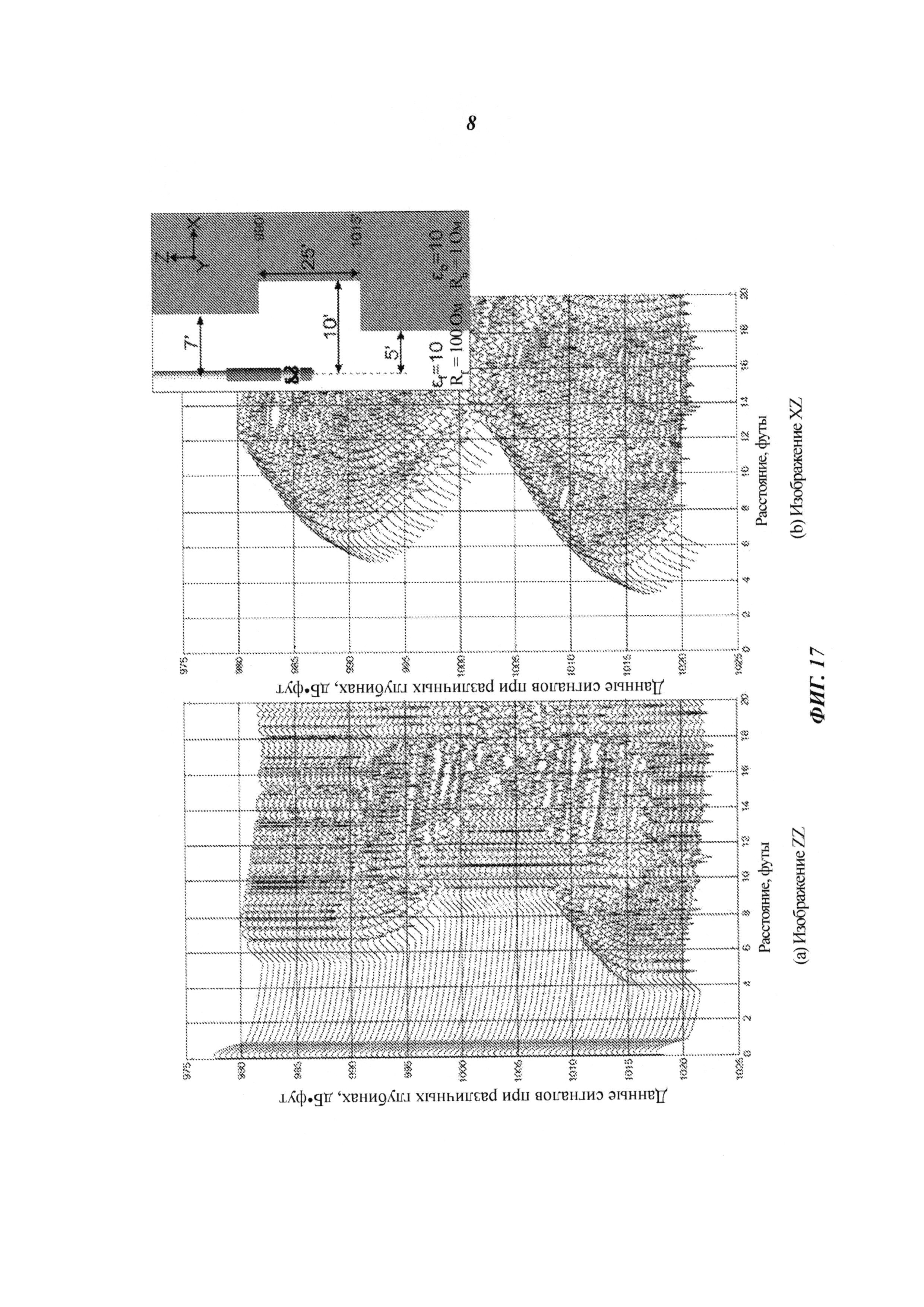
Ниже рассмотрен характер изменения сигнала в зависимости от глубины. На фиг.17а и 17b показаны изображения, полученные на основе волновых сигналов Vzz(d, z) и Vxz(d, z) соответственно. На выносном элементе приведена предполагаемая структура формации. Данная формация имеет относительную диэлектрическую проницаемость εf=10 и удельное электрическое сопротивление Rf=100 Ом·м, причем граничащая с ней формация имеет относительную диэлектрическую проницаемость εf=10 и удельное электрическое сопротивление Rb=1 Ом·м. Однако граница не является строго плоской и имеет три прямоугольные поверхности, находящиеся на расстояниях 7 футов (2,13 м), 10 футов (3,05 м) и 5 футов (1,52 м) от траектории прохождения прибора. Центральная поверхность имеет протяженность 25 футов (7,62 м) вдоль траектории прохождения прибора. Даная структура может являться, например, так называемой полостью. Форма такой структуры постоянна вдоль оси Y, причем такая структура проходит вдоль оси Y в обоих направлениях - положительном (+Y) и отрицательном (-Y). Сигналы Vzz(d, z) и Vxz(d, z) зарегистрированы на основе результатов измерений, произведенных прибором с двумя наклонными антеннами, имеющими угол наклона 45 градусов при азимуте 0 и 180 градусов соответственно. Результаты измерений, полученные посредством наклоненных рамок, преобразуют в данные, связанные с (виртуальными) диполями по осям Х и Z, путем сложения или вычитания по различным каналам. Использован импульс колоколообразной формы шириной 15 нс. Каждая из кривых, приведенных на фиг.17, обозначает данные сигнала, связанные с заданным положением на траектории ствола скважины и отцентрированные по указанному положению. Исходная ось времени преобразована в ось расстояния описанным выше способом.
На фиг.17а показаны сигналы, отраженные от границы полости (видны в диапазоне расстояний от 4 до 11 футов (от 1,22 до 3,35 м)) и отделенные от прямого сигнала (виден в диапазоне расстояний от 0 до 1 фута (от 0 до 0,31 м)). Указанные отраженные сигналы создают изображение границы полости, причем по данному изображению может быть успешно найдено расстояние до каждой поверхности границы. На фиг.17b показано изображение, составленное по межкомпонентным сигналам (XZ), по которым зарегистрированы края полости. Межкомпонентным сигналом в данном случае является сигнал, который был бы получен виртуальной Z-антенной в ответ на импульс, переданный виртуальной Х-антенной.
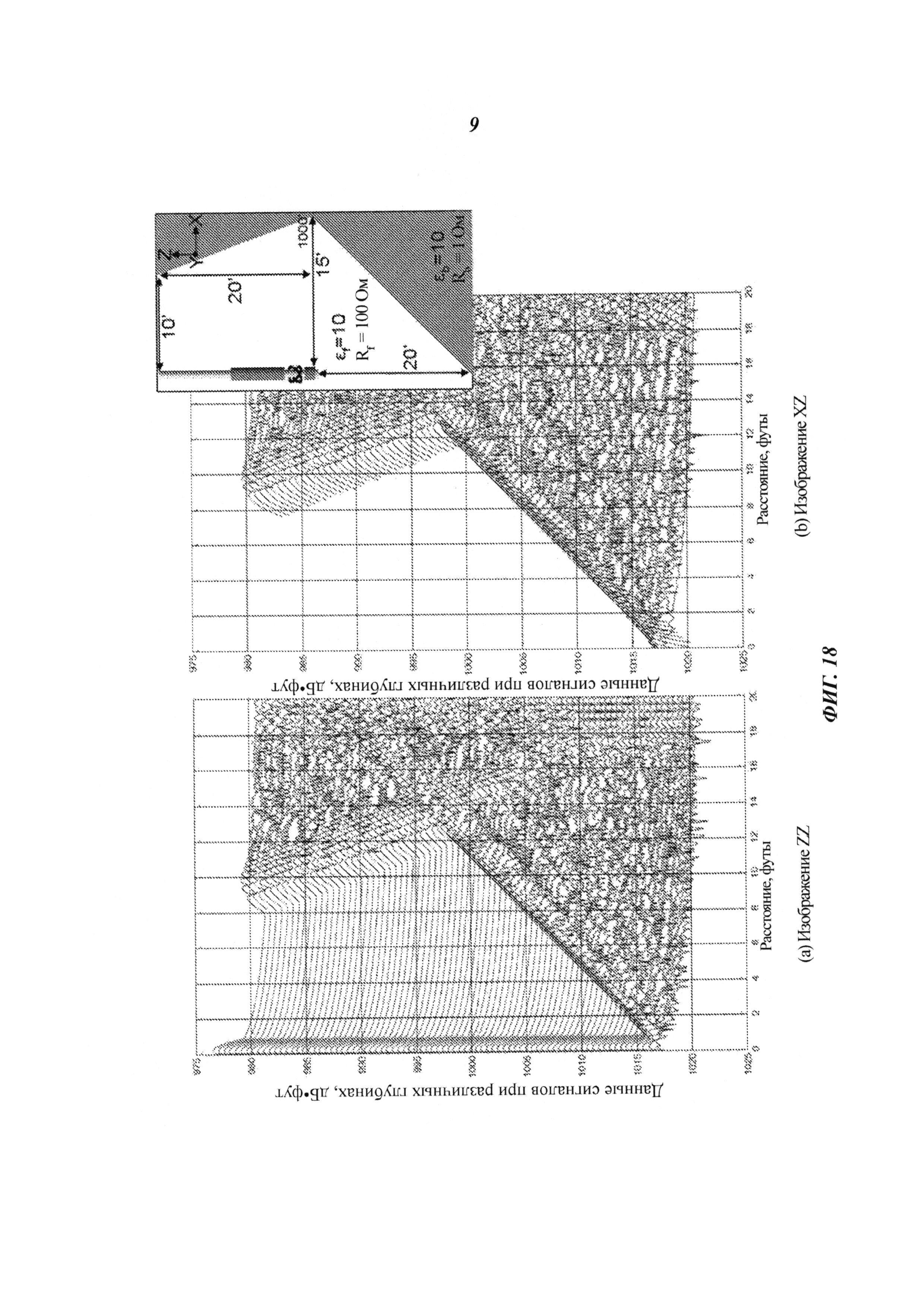
На фиг.18а и 18b показаны изображения напряжения Vzz(d, z) и Vxz(d, z), полученные при структуре, проиллюстрированной на выносном элементе. Электромагнитные свойства формации и граничащих друг с другом слоев такие же, как и в вышеописанном примере, однако в данном примере имеются две поверхности, одна из которых имеет наклон 14,03° от оси Z, а вторая поверхность имеет наклон 36,87° к оси Z. Такая структура может соответствовать, например, так называемому геологическому разрыву. Как и в вышеописанном примере для получения волновых сигналов Vzz(d, z) и Vxz(d, z) в ответ на импульс колоколообразной формы шириной 15 нс используется прибор с двумя наклонными антеннами. На фиг.18а и 18b показано, что посредством сигнала, отраженного от геологического разрыва, успешно составляют изображение границы указанного разрыва на основе данных однокомпонентных (ZZ) и межкомпонентных (XZ) сигналов. Как и ожидалось, наблюдается только однокомпонентный прямой сигнал, а межкомпонентный прямой сигнал отсутствует. Этот эффект может быть полезен для устранения нежелательных составляющих прямого сигнала.
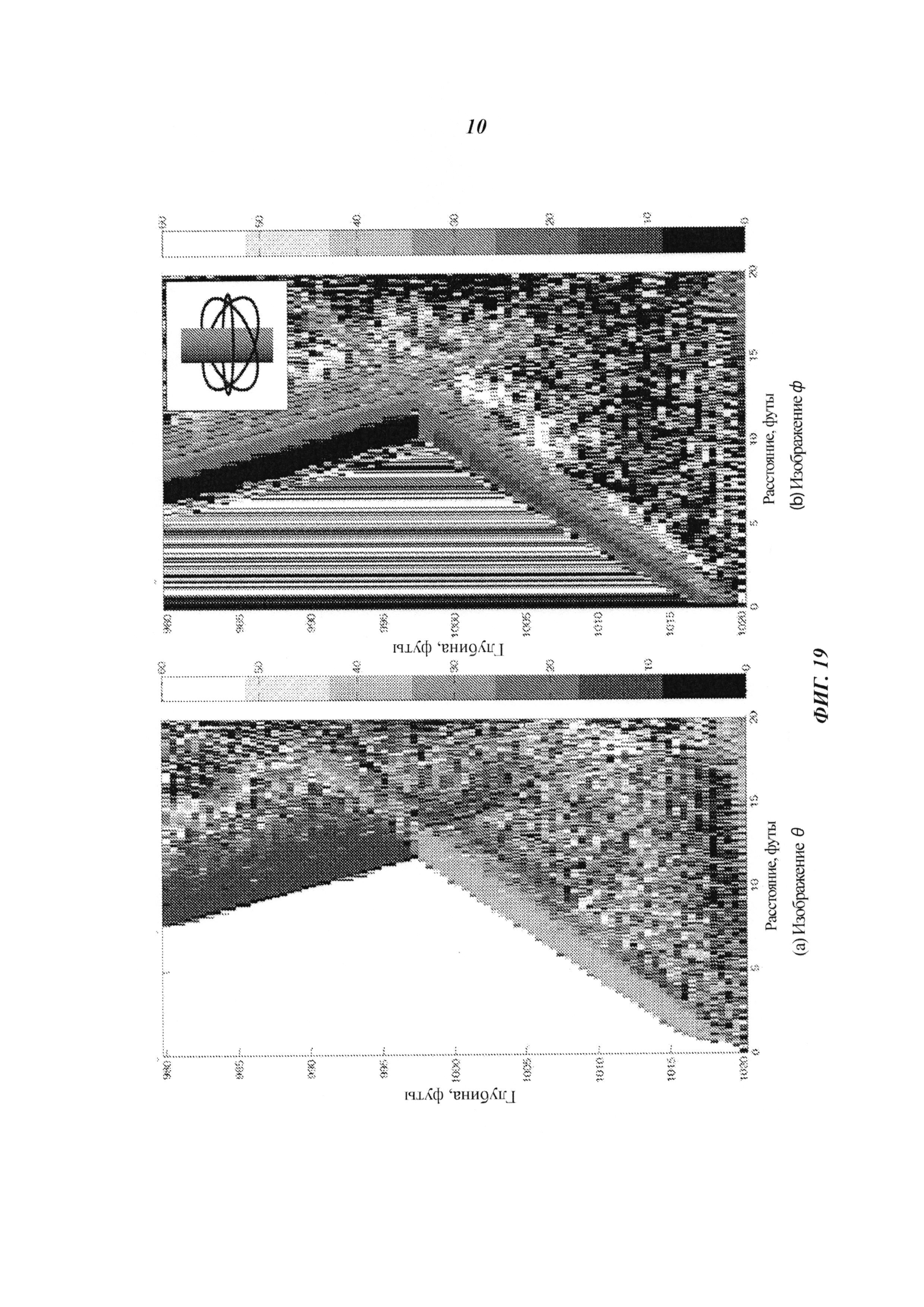
На фиг.19 показаны результаты применения вышеизложенного метода поиска направления по отношению к результатам измерений, получаемым от прибора с тремя наклоненными рамочными антеннами, для формации, имеющей структуру, приведенную на фиг.18. Как показано на выносном элементе, три антенны наклонены на 35,26° от оси Z и повернуты на азимуты 0°, 120° и 204°. При таких углах рамки расположены взаимно ортогонально, естественным образом обеспечивая формирование многокомпонентных сигналов. Результаты измерений, полученные посредством наклоненных рамочных антенн, преобразованы в данные, связываемые с виртуальными диполями по осям X, Y и Z путем сложения или вычитания по различным каналам. На фиг.19а показано изображение рассчитанного угла наклона θ(d, z), а на фиг.19b показано изображение рассчитанного азимута ϕ(d, z). На фиг.19 видно, что самые стабильные результаты измерения азимутов и углов наклона по регистрируемым сигналам, поступающим от геологического разрыва, получены при уровнях отраженного сигнала, близких к максимальным значениям (см. полосы одного цвета). Это является подтверждением того, что выполняется измерение угла падения в зависимости от расстояния.
Для определения наклона аномалии, азимута аномалии и расстояния до аномалии на каждой глубине система сначала определяет пиковое значение отраженного сигнала и затем обрабатывает значения, связанные с каждой рассматриваемой глубиной, в соответствии со следующими выражениями:



На фиг.20 показаны рассчитанные углы наклона и азимута, полученные в результате применения данной процедуры. На фиг.21 показано рассчитанное расстояние до обнаруженной границы. Следует отметить, что угол наклона границы слоя, азимут границы слоя и расстояние до границы слоя измерены относительно точки на указанной границе, находящейся наиболее близко к приемопередатчику. На фиг.20 и 21 верхняя поверхность границы обозначена как «b1», а нижняя поверхность границы - как «b2». На фиг.20 и 21 показано, что все полученные значения наклона, азимута и расстояния совпадают с фактическими значениями этих величин, что указывает на высокую точность их измерения.
Неточности, присутствующие у краев фиг.20 и 21, свидетельствуют о близости аномалии и влиянии помех от поля прямого сигнала на поле отраженного сигнала. В данном примере минимальное расстояние, на котором обеспечивается свободное от помех измерение, составляет приблизительно 2,5 фута (0,76 м), причем это расстояние может быть уменьшено путем использования импульсов меньшей ширины. Следует отметить, что уравнения (4)-(6) могут быть обобщены для обнаружения множественных аномалий. Такой подход подразумевает определение множества пиковых значений сигналов и величин, соответствующих таким значениям.
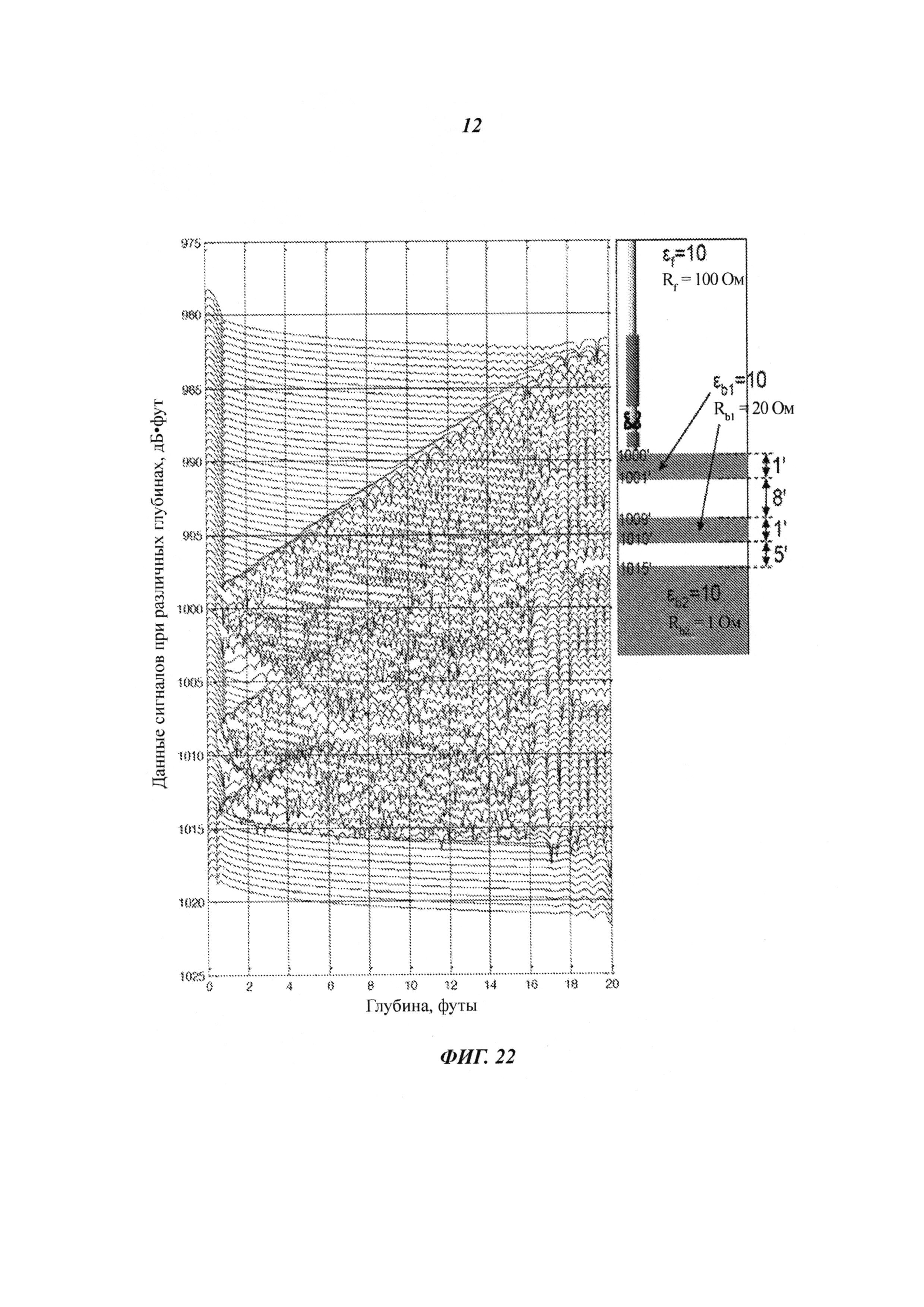
На фиг.22 показано изображение напряжения Vyy(d, z), полученное по результатам измерений посредством прибора с двумя наклонными антеннами (с наклоном 45° при азимуте 0° и 180°) в процессе его перемещения через последовательность слоев формации. Как показано на выносном элементе, слои формации имеют относительную диэлектрическую проницаемость, равную 10, и следующие значения удельного электрического сопротивления в порядке от верхнего слоя к нижнему: 100 Ом·м, 20 Ом·м, 100 Ом·м, 20 Ом·м, 100 Ом·м и 1 Ом·м. Самая верхняя формация имеет толщину 1000 футов (304,8 м), а последующие слои - толщину 1 фут (0,31 м), 8 футов (2,44 м), 1 фут (0,31 м), 5 футов (1,52 м) и 10 футов (3,05 м). Прибор передает импульс сигнала колоколообразной формы с шириной 15 нс. На фиг.22 показано, что отраженные сигналы от первого слоя с малой толщиной можно наблюдать, даже если приближающийся прибор находится на расстоянии 20 футов (6,1 м). Пиковые значения отраженных сигналов указывают на расстояния до слоев, от которых происходит отражение сигналов. Например, при перемещении прибора вдоль оси Z из отметки 980 футов (298,7 м) в отметку 1000 футов (304,8 м) пиковое значение отраженного сигнала соответственно перемещается от 20 футов (6,1 м) до 0 футов (0 м), указывая на сближение со слоем, что подтверждает упреждающее действие прибора.
На фиг.23 приведено изображение напряжения Vyy(d, z), полученное по результатам измерений посредством прибора с тремя наклонными антеннами, приближающегося к обсадной колонне скважины под углом пересечения 26,57° (как показано на выносном элементе). Формация имеет относительную диэлектрическую проницаемость, равную 10, и удельное электрическое сопротивление в 100 Ом·м. Азимутальное направление обсадной колонны скважины от прибора составляет 0°. Использован импульс колоколообразной формы шириной 15 нс. На фиг.24 и 25 показаны результаты измерения наклона обсадной колонны скважины, азимута обсадной колонны скважины и расстояния до обсадной колонны скважины, полученные по изображению напряжения, представленному на фиг.23. На фиг.24 и 25 показано, что все параметры успешно измерены даже на расстоянии 20 футов (6,1 м).
Вышеописанные примеры показывают, что антенна приемопередатчика многокомпонентных сигналов с системой обработки и передачи импульсов во временной области обеспечивает точное измерение характеристик формации, а также измерение направлений, в которых находятся множественные аномалии, и расстояний до таких аномалий. Измерение расстояния можно выполнять путем анализа пиковых значений полученного сигнала во времени. Измерение направления можно выполнять с использованием эффектов электромагнитной поляризации, регистрируемых антеннами многокомпонентных сигналов. Такие антенны можно комбинировать, причем они не обязательно должны быть направленными, что позволяет преодолеть различные ограничения по структуре электрических и механических средств прибора. Особенно важно отметить, что изложенный в данном документе подход позволяет применять наклонные рамочные антенны и упрощает использование средств каротажа в процессе бурения. Совместное использование антенн позволяет размещать приемопередатчик рядом с буровым долотом, что увеличивает дальность упреждающего обнаружения.
Ввиду того, что отраженные сигналы естественным образом отделены от прямого сигнала во временной области, глубина обнаружения не зависит от разделения передатчика и приемника, что позволяет обеспечить дальность обнаружения в формациях с проводящей средой до 400 футов (121,92 м) и даже выше. Аналогично, отраженные сигналы от аномалий, находящихся на различных расстояниях, также естественным образом отделены друг от друга. В результате, ожидаемый эффект состоит в том, что возможно осуществление обнаружения и отслеживания множественных аномалий без необходимости применения сложных алгоритмов решения обратной задачи, что позволяет проводить анализ в реальном времени. Кроме того, прибор может иметь меньшие размеры по сравнению с известными приборами электромагнитного каротажа, ввиду того, что по меньшей мере часть электронных средств (например, антенны) может быть общей для передающих и приемных модулей.
Специалисту будут очевидны различные вариации и модификации настоящего изобретения после прочтения вышеприведенного описания. Например, выше приведено описание множества конфигураций антенн применительно к прибору каротажа в процессе бурения, однако такие конфигурации антенн также могут быть применены в проводных каротажных приборах. Нижеприведенная формула изобретения охватывает все такие вариации и модификации.
Вставной предохранительный клапан с электрическим приводом
Предохранительный клапан, оснащенный средствами для подачи энергии к вставному предохранительному клапану
Система и способ изоляции тока, подаваемого на электрическую нагрузку в скважине
Устройство для регулирования расхода флюида
Клапан подземной скважины, приводимый в действие за счет дифференциального давления
Устройство регулирования потока для установки в скважине (варианты) и способ регулирования потока
Регулируемый ограничитель потока для использования в подземной скважине
Скважинное устройство для установки в стволе скважины в подземной зоне и способ регулирования потока в стволе скважины
Система управления для управляемого с поверхности глубинного предохранительного клапана
Выходной узел с отклонителем флюида, перенаправляющим флюид по двум или более каналам
Вставной предохранительный клапан с электрическим приводом
Предохранительный клапан, оснащенный средствами для подачи энергии к вставному предохранительному клапану
Система и способ изоляции тока, подаваемого на электрическую нагрузку в скважине
Устройство для регулирования расхода флюида
Клапан подземной скважины, приводимый в действие за счет дифференциального давления
Регулируемая система ограничения потока для использования в подземной скважине
Устройство регулирования потока для установки в скважине (варианты) и способ регулирования потока
Регулируемый ограничитель потока для использования в подземной скважине
Скважинное устройство для установки в стволе скважины в подземной зоне и способ регулирования потока в стволе скважины
Система управления для управляемого с поверхности глубинного предохранительного клапана

