Результат интеллектуальной деятельности: ТРАНСПОРТИРОВАНИЕ ОБЪЕКТА ПО ПОВЕРХНОСТИ
Вид РИД
Изобретение
Данное изобретение относится к перемещению объекта по поверхности, например, игровой фигуры по игровому полю.
„Классическая“ настольная игра состоит из физического игрового поля (игровой стол/доска) и игровых фигур. Игровые фигуры расставляют на поле и перемещают игроки (люди) согласно правилам игры. Обычный компьютер не имеет доступ к такой классической игре. Он как не знает позицию фигур в игре на поле, так и не может перемещать их.
При адаптации классической настольной игры для компьютера, что сегодня является общей практикой, расстановка игровых фигур на игровом поле происходит в компьютере „виртуально“ и отображается на экране дисплея. Компьютер знает расстановку всех фигур на виртуальном поле. Ходы фигур в игре по такому виртуальному игровому полю производятся только по программе. „Компьютер“ может перемещать фигуры только в узком смысле. Конечно, компьютер может сделать ход по вводу человеком. Это делает возможной „совместную“ игру компьютера и человека по программе на виртуальном игровом столе. Технически это дает возможность при сетевом использовании принять участие в игре нескольким игрокам, разделенным расстоянием в пространстве.
Поскольку человек любит брать в руки „реальные“ игровые фигуры и передвигать их по реальному игровому полю, то, например, при игре в шахматы с игровыми шахматными компьютерами часто расстановка фигур и их перемещение по шахматному полю выполняются виртуально, а человек имитирует ходы вне компьютера на реальной игровой доске. Через соответствующий интерфейс человек и компьютер сообщают друг другу о сделанных ходах, и человек обновляет позицию фигур в игре на физической игровой доске.
Кроме того, часто при игре с шахматными компьютерами компьютер распознает перемещения игровых фигур напрямую через механические или электромагнитные переключатели. В таких случаях переключатель помещен под встроенным игровым полем. Если игровая фигура перемещается по доске, срабатывает механизм переключения с начального поля на поле назначения хода. Получив такую информацию, шахматный компьютер электронным способом распознает и сохраняет в памяти это перемещение. Информация о том, какая игровая фигура имеется в виду при таком перемещении, в сегодняшних системах не распознается. Эта информация генерируется самим компьютером путем обновления данных обо всех ходах игры, на основании заданной начальной позиции. Ходы игры со стороны компьютера, отображенные им на дисплее, как правило, должны быть выполнены человеком на физической доске.
Есть также решения, в которых компьютер сам передвигает игровые фигуры манипулятором, но это - очень дорогостоящий и затратный по времени метод, и в силу этого едва ли применим. Не говоря уже о том, что такие решения чаще всего специализированы под конкретную игру, в частности, шахматы. Более того, для таких подходов характерны ограничения. Скажем, нельзя передвигать несколько игровых фигур одновременно.
В DE102006009451.4 было предложено для локализации игровых фигур на игровом столе использовать технологию RFID (=radio frequency identification - радиочастотное определение), где под игровым полем монтируется считыватель RFID или антенна считывателя, а игровая фигура снабжается импульсным приемопередатчиком RFID. При установке игровой фигуры на поле сигнал приемопередатчика считывается и идентифицируется считывателем под игровым полем. После этого игровая фигура привязывается к позиции считывателя или витка считывателя.
Согласно еще не опубликованному DE102008006043.7
- игровая плоскость заменена горизонтальным дисплеем компьютера, допустим, жидкокристаллическим, который может таким образом отображать любые игровые поля;
- каждая игровая фигура снабжена оптическим сенсором на нижней стороне, имеет идентификатор ID и по радиосвязи соединена с игровым компьютером.
В этом методе игровой компьютер может автоматически распознавать тип и позицию игровых фигур на игровом столе по определенной комбинации данных, отображенных на игровом поле и дистанционно считываемых сенсором в игровой фигуре. Поскольку это может быть выполнено очень точно и быстро, игровой компьютер способен отслеживать позицию фигур в игре на игровом столе, фактически, непрерывно.
Благодаря описанному выше подходу появляется возможность универсальной компьютерной адаптации настольных игр, когда компьютер обеспечивает сменное игровое поле на экране, выполняющем роль игрового стола и автоматически отслеживающем позицию множества физических игровых фигур. На известном уровне техники автоматическое и эффективное передвижение этих физических фигур компьютером при малой технической трудоемкости невозможно. Это реализуемо только за счет сложных специальных технических решений, включающих в себя компьютерный манипулятор с механическим захватом или активные самодвижущиеся игровые фигуры, что, впрочем, имеет массу неудобств.
Желательно, чтобы пассивные игровые фигуры, беспорядочно расставленные на игровом столе, эффективно и автоматически передвигались компьютером без необходимости использования руки робота или активного привода, встроенного в игровые фигуры.
Разумеется, трудности, о которых сказано выше, относятся и к другим областям и не ограничены игровыми эпизодами. Более того, проблемы, имеющие отношение к перемещению игровых фигур, меняются в зависимости от игры. Например, игра с единственной игровой фигурой предъявляет меньше требований относительно генерации движения, чем игра с несколько игровыми фигурами, где одна или определенный набор игровых фигур должны перемещаться относительно других игровых фигур по поверхности или игровому столу. Помимо этого, некоторые фигуры в игре выстраиваются вращательно-симметрично, при этом их чередующаяся ориентация относительно поверхности не имеет значения, в других же играх с другими игровыми фигурами это может быть по-иному, а в некоторых играх ориентация игровой фигуры или направление ее взгляда важны.
Таким образом, задачей настоящего изобретения является представление концепции перемещения игровых фигур по поверхности, которое может быть осуществлено при небольших затратах средств и пространства и/или которое расширяет применимость благодаря тому, что элементы, необходимые для генерации движения, совместимы с большим числом вероятных способов распознавания перемещения по игровой поверхности.
Поставленная задача достигается посредством объекта по пункту 1, системы по одному из пунктов 8, 19, 20 и 24 и способа по одному из пунктов с 30 по 33 формулы изобретения.
Основной идеей, на которой базируется предлагаемое изобретение, является то, что при определении положения объекта на поверхности можно также использовать средства транспортировки объекта по поверхности, при которой требуются меньшие воспроизводимые транспортные перемещения в силу возможности осуществления управления напрямую на основе наблюдаемого перемещения и сравнения его с желаемым перемещением.
Исходя из первой задачи настоящего изобретения, эта идея используется путем инициации движения за счет воздушной подушки между объектом и поверхностью. „Несомый“ таким образом объект может перемещаться горизонтально на основе самых различных бесконтактных способов, например, за счет магнитных полей, электростатически или тому подобное. В соответствии с одним из конструктивных решений воздушная подушка образуется под объектом горизонтально избирательно в месте нахождения объекта при его распознавании устройством локализации. Таким способом можно выборочно снизить трение движения одного или нескольких объектов среди множества объектов, в особенности, относительно других объектов, так, чтобы устройство, оказывающее боковое усилие, не было вынуждено оказывать такое усилие специально только на один или несколько определенных объектов, а могло генерировать единое поле, действующее на все объекты, при этом фактически перемещаться будут только объекты со сниженным трением движения. Кроме того, сжатый воздух, используемый для создания воздушной подушки, продуваемой сквозь поверхность, по которой должен транспортироваться объект, может использоваться не только для снижения трения движения по поверхности, но и для инициации горизонтального перемещения или создания боковых усилий для перемещения объектов горизонтально по этой поверхности. По одному из вариантов технического исполнения это достигается в сочетании со специфическим конструктивным решением основания объекта, в котором выполнены несколько воздушных камер, разделенных между собой, при этом одна или несколько из них имеют отверстие во внешней стенке, через которое воздух воздушной подушки может выходить латерально, посредством чего за счет отдачи объект получает боковое усилие. В комбинации с соответствующим устройством локализации, определяющим местоположение объекта на поверхности, и в сочетании с плотным распределением индивидуально управляемых воздушных сопл для создания воздушной подушки воздух может точно вдуваться в требуемый набор воздушных камер объекта, перемещая объект на желаемую позицию. В качестве альтернативы, безусловно, возможно оснащение воздушных камер объекта механизмами закрывания и открывания боковых отверстий, за счет чего исключается необходимость индивидуально управлять воздушными соплами.
Как вариант, активация транспорта может осуществляться магнитным полем поверхности. По поверхности распределены раздельно управляемые витки соленоида, в которых можно создавать магнитные диполи с ориентацией перпендикулярно к поверхности. Если снабдить объект элементом или множеством элементов, притягиваемых или отталкиваемых магнитным полем, появляется возможность перемещать объект поперек поверхности, то есть - на основе магнитного отталкивания, или продвигать объект вдоль поверхности, то есть - пользуясь магнитным притяжением.
В качестве еще одного варианта транспорт может возбуждаться волнами изгиба поверхности. Согласно одному из технических решений в этом направлении поверхностные волны, распространяющиеся в поверхности, рассчитывают в соответствии с синтезом поля волны таким образом, что результирующий компонент перемещения, касательный к поверхности, поверхностных точек на пиках поверхностной волны, на которых главным образом поддерживается объект, приводит к перемещению объекта в направлении желаемой позиции.
Все рассмотренные аспекты объединяет то, что механические захваты или иные надстройки над поверхностью не нужны, что в противном случае могло бы пойти вразрез с эстетикой оборудования или игры или противоречило бы назначению.
Компоненты, участвующие в генерации движения согласно вышеуказанным аспектам, вполне можно скрыть под транспортной поверхностью. Кроме того, рассмотренные аспекты позволяют с помощью транспортной поверхности определять координаты положения оптически. Как следует из аппаратных версий настоящего изобретения, это достигается путем комбинирования индивидуальных транспортных механизмов с устройством локализации, которое использует изображение на экране дисплея в сочетании с оптическим датчиком, встроенным в объект, как это описано более подробно ниже. Этим обеспечивается возможность интегрирования транспортной поверхности с большинством компонентов, необходимых для позиционирования объектов и генерации движения, в функциональную единицу, способную в дальнейшем вывести на транспортную поверхность любое изображение.
В дальнейшем предпочтительные варианты осуществления предлагаемого изобретения рассматриваются более подробно с использованием сопроводительных чертежей, где:
на фиг. 1 показана общая схема системы для транспорта или перемещения объекта по поверхности;
на фиг. 2 показана часть изометрии сопловой диафрагмы;
на фиг. 3 дан чертеж вида снизу основания объекта в соответствии с вариантом реализации;
на фиг.4a,b дан вид в плане на сопловую диафрагму, имеющую раздельно управляемые воздушные сопла с помещенным на поверхность объектом, имеющим основание в соответствии с фиг. 3, где на фиг. 4a и 4b отображено изменение положений объекта за счет активации разных воздушные сопл;
на фиг. 5a,b дан вид в плане воздушного сопла в закрытом или открытом состоянии в соответствии с вариантом реализации;
на фиг. 6a,b дан вид в плане, как на фиг. 4a и 4b, для воздушных сопл, как на фиг. 5a и 5b;
на фиг. 7 схематически показана часть системы на фиг. 1 для иллюстрации варианта способа перемещения объекта по поверхности согласно одной из реализаций;
на фиг. 8 дан чертеж вида снизу основания объекта в соответствии с другим вариантом технического исполнения;
на фиг. 9a дан фрагмент изометрии решетки обмотки электромагнита в соответствии с одной из аппаратных версий;
на фиг. 9b дан чертеж вида сверху решетки на фиг. 9a;
на фиг. 10a-c дан чертеж вида сбоку объекта, расположенного на транспортной поверхности, работающего в различных режимах магнитного взаимодействия между магнитной решеткой и объектом в соответствии с разными техническими исполнениями;
на фиг. 11a,b дан чертеж вида в плане объекта, имеющего разные элементы, которые могут быть притянуты или отражены магнитным полем;
на фиг. 12a,b дан чертеж вида сверху на решетку обмотки электромагнита и объект, расположенный на ней, иллюстрирующий различные схемы активизации катушек электромагнита в магнитной решетке для генерации изменения положений объекта на поверхности;
на фиг. 13a,b дан чертеж вида сверху как на фиг. 12a и 12b, но с использованием отталкивающего магнитного взаимодействия;
на фиг. 14 дана схема, иллюстрирующая процесс генерации движения посредством поверхностных волн;
на фиг. 15a,b дан вид в разрезе и вид в плане генератора изгибной волны, проходящего по периферийному краю пластины, формирующей транспортную поверхность, в соответствии с конструктивным решением настоящего изобретения;
на фиг. 16 дан боковой вид в разрезе устройства для определения положения объекта на дисплее;
на фиг. 17 дан рисунок, иллюстрирующий игровое устройство, имеющее функцию определения положения игровой фигуры, в соответствии с одним из технических решений;
на фиг. 18 дана блочная схема передающего устройства с фиг. 17;
на фиг. 19 дана блок-схема работы игрового устройства на фиг. 17 в соответствии с одной из реализаций;
на фиг. 20 дана схема возможных вариантов поиска позиции и ориентации фигур в игре на фиг. 17 и 18 на дисплее;
на фиг. 21 дана блок-схема работы игрового устройства на фиг. 17 в соответствии с другой версией реализации;
на фиг. 22 дана схема последовательности пошаговых изображений на экране дисплея при двоичном поиске в рамках способа в соответствии с фиг. 21;
на фиг. 23 дан вид в разрезе основания игровой фигуры, размещенной на дисплее, в соответствии с вариантом конструкции;
на фиг. 24 дан чертеж поперечного сечения основания с передающим устройством для монтажа на нижней стороне игровой фигуры в соответствии с одним из конструктивных решений;
на фиг. 25 схематически показан кадр с фотошаблоном в соответствии с вариантом технического решения; и
на фиг. 26a дан чертеж сечения фрагмента транспортной поверхности, включающего в себя компоненты средства генерации движения и устройства позиционирования, где недостающими внешними элементами оборудования являются средства управления и оценивания, например, компьютер;
на фиг. 26b дан чертеж бокового сечения игровой фигуры, которая может использоваться вместе с компонентом на фиг. 26a; и
на фиг. 26c дан чертеж сечения фрагмента транспортной поверхности, включающего в себя компоненты средства генерации движения и устройства позиционирования в соответствии с другим вариантом реализации.
Далее различные конструктивные решения настоящего изобретения будут рассмотрены более подробно. При этом неоднократно повторяющиеся элементы на разных фигурах имеют одинаковые или подобные номера ссылок и повторно не описываются.
В частности, описаны различные аппаратные версии для разных аспектов, упомянутых выше, которые, однако, также могут быть частично объединены друг с другом, на что указывается в соответствующем контексте.
Несмотря на то что описание часто относится к игровым приложениям, предлагаемое изобретение, безусловно, может быть применено в других областях деятельности, где необходимо автоматически перемещать предметы по поверхности, скажем, в логистике или тому подобное.
На фиг. 1 показана общая схема системы перемещения объекта 10 по поверхности 12. Она включает в себя устройство позиционирования 14, способное отследить положение объекта 10 на поверхности 12, например, латеральное положение, скажем, центра тяжести и/или латеральное направление визирования или круговое движение объекта вокруг нормали к поверхности 12 с учетом исходного направления. В дальнейшем в контексте фиг. 16-25 описаны варианты реализации устройства позиционирования 14, где в схему устройства позиционирования 14 включен оптический датчик, встроенный в объект 10, и дисплей, проецирующий изображение с экрана на тыльной стороне поверхности 12 сквозь поверхность 12 на рабочую плоскость, куда помещен объект 10. При этом возможны также другие версии устройства позиционирования 14, которые, к примеру, включают в себя видеокамеру (не показана) с обзором транспортной поверхности 12 с фронтальной стороны, то есть, на фиг. 1 - сверху, или другие дистанционные датчики, в частности, бесконтактные, как например, смонтированные вдоль кромки транспортной поверхности 12 два или более дистанционных датчика.
Далее, система на фиг. 1 включает в себя средство перемещения объекта по поверхности, то есть - устройство 16. Таким образом, устройство 16 выполняет реальное перемещение без вмешательства пользователя. В дальнейшем в контексте фиг. 2-16 средство перемещения 16 описано в виде ряда аппаратных версий. В зависимости от технического исполнения средство перемещения 16 выполнено таким образом, что силы, меняющие положение 10' объекта на поверхности 12, прилагаются к объекту 10 бесконтактно, например, с помощью сжатого воздуха, посредством магнитного поля или с использованием изгибных волн. Кроме того, возможно применение других способов или комбинаций способов, что поясняется в дальнейшем.
Устройство позиционирования 14 и средство перемещения 16 сопряжены между собой. В частности, устройство позиционирования 14 и средство перемещения 16 могут, например, быть соединены друг с другом через орган управления 18. Орган управления 18, в частности, включает в себя процессор, выполняющий надлежащую программу. Так, орган управления 18 выполнен с возможностью управления средством перемещения 16 с опорой на позицию объекта 10 на поверхности 12, распознанную устройством позиционирования, и исходную позицию или намеченную позицию объекта 10 таким образом, чтобы объект 10 приближался к требуемой позиции, заданной контуру управления, приводящему объект 10 к целевой позиции. Координаты заданной позиции объекта могут поступать из различных источников в зависимости от приложения. Данные о желаемом положении могут быть переданы от внешнего источника на орган управления 18. При этом орган управления 18 кроме функций управления средством перемещения 16 способен также выполнять другие операции, влияющие на задаваемое местоположение объекта 10. Скажем, орган управления 18 может работать также в режиме игрового компьютера, который предусматривает или получение информации о желаемом изменении положения объекта 10, передаваемой вручную игроком через некое устройство ввода, и/или автономное вычисление необходимых изменений позиции объекта 10. Устройство ввода может быть оснащено, например, клавиатурой, мышью, терминалом голосового ввода, сенсорным экраном поверхности 12 или т.п. Как уже упоминалось, система, представленная на фиг. 1, может иметь иные приложения, например, в логистике, где орган управления 18 одновременно, кроме прочего, решает логистические задачи с вычислением оптимального местоположения объекта 10.
Хотя ниже об этом будет сказано еще несколько раз, следует отметить, что устройство позиционирования 14 и средство перемещения 16 могут быть реализованы с возможностью управлять несколькими объектами 10 и 10' на поверхности 12 раздельно, то есть -определять их относительное местоположение или перемещать их индивидуально относительно другого объекта. Соответственно, орган управления 18 может быть осуществлен для манипуляции несколькими объектами 10 и 10' в различных позициях или, по меньшей мере, для контроля или управления их позициями по мере необходимости.
Далее, в контексте фиг. 2 - 8 описаны версии реализации, в соответствии с которыми устройство 60 для перемещения объекта по поверхности образует воздушную подушку между объектом и транспортной поверхностью, чтобы естественное статическое и динамическое трение между дном объекта и транспортной поверхностью были преодолены с получением значительно более низкой силы трения под воздействием воздушной подушки.
На фиг. 2 наглядно представлен фрагмент транспортной поверхности 12, снабженной воздушными соплами 20 с сеточным или рядным распределением. На фиг. 2 рядное распределение показано как равномерное горизонтальное расположение в ряды и колонки. При этом допускаются другие упорядоченные и неравномерные формы распределения воздушных сопл 20 по горизонтали. Кроме того, воздушные сопла 20 на фиг. 2 могут быть индивидуально регулируемыми или раздельно закрываемыми/открываемыми, при этом, за исключением одного отверстия 20a, все остальные отверстия изображены в закрытом состоянии. Ниже, в описании к фиг. 7, говорится о возможности использования средством перемещения 16 постоянно открытых воздушных сопл 20 или тех, которыми можно управлять только совместно. Помимо этого предусмотрено, что воздушные сопла могут закрываться и открываться при выпуске воздуха, то есть - выполнять функцию воздушных клапанов. Однако, возможно также индивидуальное управление воздушными соплами за счет клапанов, установленных в воздушных каналах, связанных с воздушным клапаном, соединяющих воздушные сопла с источником давления.
На фиг. 2 транспортная поверхность 12 показана как основная грань параллелепипеда, например, сопловой диафрагмы 22, рабочая сторона которой образует транспортную поверхность 12, состоящую из воздушных сопл 20. Возможны также другие формы.
Хотя на фиг. 2 это не показано, воздушные сопла 20, однозначно, соединены поточно с нагнетателем давления, и в открытом состоянии воздушные сопла 20a пропускают сжатый воздух. Сжатый воздух проходит через сопло 20, например, перпендикулярно транспортной поверхности 12. Вместе с тем, сопла могут быть выполнены для обеспечения прохождения воздуха через сопло 20 под углом относительно перпендикуляра к поверхности. Углы латерального наклона, т.е. прохождения касательный к поверхности 12, в частности, могут быть различными для разных воздушных сопл 20, о чем будет говориться ниже.
Теперь, в контексте фигур с 3 по 6b, будет рассмотрено техническое исполнение, где порядок расположения раздельно управляемых воздушных сопл используется в сочетании с объектом, дно которого выполнено с возможностью генерации горизонтального перемещения объекта по поверхности. На фиг. 3 показан возможный вариант конфигурации основания объекта 10. Для лучшего понимания в верхней части фиг. 3 дана соответствующая боковая проекция объекта 10.
Как видно на фиг. 3, в основании 30 объекта 10 выполнено несколько полостей 32i-32g. Само основание, или донышко, 30 - плоское, то есть оно представляет собой плоскую опорную поверхность 34. Как изображено на фиг. 3, углубления, или полости, 32i-32g могут иметь общую глубину t вовнутрь объекта 10 от опорной поверхности 34. Согласно чертежу на фиг. 3 полости 32i-32g разделены внутренними перегородками 36, перпендикулярными к опорной поверхности 34. Кроме того, среди полостей есть такие, т.е. полости 322-329, которые прилегают к внешней стенке 38 объекта 10. В примере на фиг. 3 во внешней стенке 38 для каждой из ниш 322-329 предусмотрено отверстие 402-409, которое обеспечивает боковой выход воздуха, образующего воздушную подушку под объектом 10, из соответствующей полости 322-329. К примеру, на фиг. 3 отверстия объекта 10 402, 404, 406 и 408 расположены под углом 90° относительно друг друга, что обеспечивает радиальный выход воздушного потока, формирующегося симметрично относительно оси вращения 42. Расположенные по углом 45° к перечисленным выше отверстиям, отверстия 403, 405, 407 и 409находятся относительно друг друга под углом 90°, задавая направлению воздушного потока, выходящего из соответствующих полостей, или камер, 323, 325, 327 и 329, тангенциальную составляющую. В частности, эти отверстия выполнены попарно так, чтобы пары противоположных отверстий 403 и 407 или 405 и 409выпускали воздушный поток, задавая вращение объекту, то есть - против часовой стрелки или по часовой стрелке, если смотреть сверху.
Как будет проиллюстрировано на фиг. 4a и 4b, благодаря конструкции полостей и состоящих из них камер, подбирая сочетания камер, в которые подается сжатый воздух из воздушных сопел, можно вращать объект 10 на поверхности и/или перемещать его в желаемом направлении, то есть - задавать любое направление движению, комбинируя прямолинейное движение и вращение вокруг оси 42. Таким образом, сжатый воздух в камере 322 за счет выпуска латерального потока через отверстие 402 перемещает объект 42 в направлении, противоположном исходящему латеральному потоку воздуха. Это применимо для отверстий 404, 406 и 408 соответственно. Если сжатый воздух одновременно поступает в камеры 403 и 407, струи воздуха, исходящие из соответствующих отверстий, вызывают вращение объекта по часовой стрелке (фиг. 3). Вращение в противоположную сторону достигается подводом сжатого воздуха к камерам 329 и 325. При заполнении сжатым воздухом камеры 321 на фиг.3, закрытой со всех сторон внутренней перегородкой 36, боковые усилия на объект 10 не воздействуют, но между объектом 10 и поверхностью создается воздушная подушка.
Взаимодействие между органом управления 18, индивидуально управляемыми воздушными соплами 20 и основанием специальной конфигурации 30 объекта 10 проиллюстрировано далее на фиг. 4a и 4b. На фиг. 4 показан участок транспортной поверхности 12 и раздельно управляемые воздушные клапаны 20. Позиция объекта 10 на поверхности 12 на фиг. 4a известна органу управления 18 через устройство позиционирования 14. На фиг. 4a предполагается, что для перехода на желаемую позицию объект 10 планируется переместить в южном направлении (на фиг. 4a - вниз). Соответственно, орган управления 18 следом за воздушными клапанами 20, расположенными под или радом с центральной воздушной камерой 322, активирует или открывает воздушные сопла 20, соотносящиеся с пневмокамерой в северной части, чтобы воздух, исходящий латерально через соответствующее отверстие этой камеры 322, смещал объект 10 на воздушной подушке, образуемой открытыми воздушными соплами 20, в требуемом направлении, как обозначено стрелкой 50.На фиг. 4a открытые воздушные клапаны обозначены овалом, а закрытые воздушные клапаны - чертой.
На фиг. 4b показана та же самая исходная позиция, что и на фиг. 4a. Однако в этом случае предполагается, что орган управления 18 для приближения объекта 10 к желаемой позиции должен вращать объект 10 по часовой стрелке. Соответственно, помимо воздушных клапанов 20, заполняющих воздухом центральную камеру 321, открываются воздушные клапаны 20, расположенные напротив воздушных камер 322 и 327. Поток воздуха, исходящий в сторону от камеры 323, возбуждает тягу 52 в направлении по касательной, противоположном направлению тяги 54, создаваемой потоком воздуха, исходящего в сторону от противоположной воздушной камеры 327, посредством чего генерируется желаемое вращательное движение объекта 10 почасовой стрелке.
Следует обратить внимание на то, что специфическая конфигурация дна объекта на фиг. 3 приведена лишь в качестве примера. Возможны многочисленные модификации. Допустим, если во вращении объекта 10 нет необходимости, объект 10 будет иметь только три отверстия, через которые воздушный поток исходит радиально, и которые, например, могут быть расположены под углом 120° друг к другу. Если же траектория движения объекта 10 по поверхности 12 задана иначе, и, скажем, имеет определенные ограничения, то, возможно, достаточно только какой-либо одной боковой полости с отверстием в стенке 38 рядом со следующей полостью или камерой, которая не имеет боковое отверстие в стенке, как камера 321.
Выше в описании фиг. 2-4b воздушные сопла 20 именовались также воздушными клапанами. Это объясняется тем, что индивидуальное управление воздушными соплами может осуществляться или напрямую каждым воздушным соплом, которое в таком случае выполняет функции воздушного клапана, или посредством воздушного клапана с которым сопряжено определенное постоянно открытое управляемое воздушное сопло. Каждой такой паре воздушного сопла и сопряженного с ним клапана должен соответствовать воздушный канал, что требует большого пространства.
На чертежах фиг. 5a и 5b приведены примеры воздушного клапана 20 в закрытом и открытом состоянии. На фиг. 5a и 5b воздушные клапаны выполнены из кремния 60. К примеру, из силикона может быть изготовлен весь корпус 22 (фиг. 2) целиком, или же основной несущий элемент может быть выполнен из листового стекла с матрицей просверленных в нем отверстий, в которые вмонтированы отдельные силиконовые клапаны, как показано на фиг. 5a и 5b. В частности, материал 60 клапана, допустим, кремний, имеет показатель преломления, эквивалентный показателю преломления материала листа несущего элемента, то есть, например, стекла, чем в данном случае достигается полная светопроницаемость всей поверхности 12. Коэффициент преломления может, например, составлять 1,43. В предпочтительно эластичном материале клапана 60 предусматривается сквозная прорезь 62 от поверхности 12 до противоположной плоскости 64, от которой предположительно подают сжатый воздух. Прорезь предусматривается выполнять в эластичном материале 60.
С обеих сторон вдоль прорези устанавливают электроды 66 и 68 с разностью потенциалов. Внутреннее покрытие 70 стенок прорези 62 должно гарантировать, чтобы в сомкнутом состоянии, показанном на фиг. 5a, электроды 66 и 68 не соприкасались. Понятно, что в таком внутреннем покрытии 70 нет необходимости, если электроды 66 и 68 вмонтированы на расстоянии от прорези 62 и не будут взаимно контактировать в закрытом состоянии.
Теперь орган управления 18 должен закрыть воздушный клапан на фиг. 5a. Для этого на разные электроды 66 и 68 подается разный электрический потенциал. На фиг. 5b проиллюстрирован случай, когда на электроды 66 и 68 подается заряд одинаковой полярности. Таким образом, согласно схеме фиг. 5a электроды 66 и 68 воздушного клапана могут быть подключены к двум разным источникам напряжения, в то время как на схеме фиг. 5b каждый из электродов 66 и 68 соединен с одноименным полюсом. На фиг. 5b приведен пример с отрицательным полюсом. Возникающая за счет этого электростатическая сила отталкивания между электродами 66 и 68 размыкает прорезь клапана 62 в овал, как показано на фиг. 5b.
Безусловно, вариант конструкции на фиг. 5a и 5b дан лишь в качестве примера, в то время как возможны иные технические решения. Кроме того, наглядное представление на фиг. 5a и 5b упрощено настолько, что в нем не отображены линии питания электродов 66 и 68. Для раздельного управления воздушными клапанами они должны индивидуально подключаться/отключаться к упомянутым выше источникам напряжения через соответствующие обособленные контуры. Также следует заметить, что на фиг. 5a и 5b окружность 72 графически отображает возможное взаимодействие между материалами клапана 60 и вышеназванной пластины несущего элемента, например, листовым стеклом.
Фигуры 6a и 6b демонстрируют процесс управления матрицей воздушных клапанов, имеющих конструкцию, соответствующую фиг. 5a и 5b, для генерации движений, показанных на фиг. 4a и 4b. Говоря кратко, фиг. 6a и 6b изображают фрагмент транспортной поверхности 12, оснащенной набором клапанов 20, по конструкции соответствующих фиг. 5a и 5b, где объект 10 с основанием, выполненным согласно фиг. 3, помещен на поверхность 12. Как видно на фиг. 6a, воздушные клапаны 20, расположенные под камерами 321 и 322, находятся в открытом состоянии в соответствии с фиг. 5b для возбуждения движения в южном направлении, как это имело место в случае с фиг. 4a;а на фиг. 6b в состоянии, соответствующем фиг. 5b, находятся только те воздушные клапаны, которые расположены под камерами 321,323 и 327, в то время как определенные другие воздушные клапаны находятся в закрытом состоянии, соответствующем фиг. 5a.
Как будет рассмотрено позже в отношении фиг. 26a и 26b, воздушные клапаны, вмонтированные в лист стекла, имеющего одинаковый показатель преломления, что описано в контексте фиг. 5a - 6b, имеют то преимущество, что при закрытых воздушных клапанах они не нарушают оптические свойства стеклянной поверхности. Другими словами, при закрытых воздушных клапанах не возникают „точки разрыва“, которые влияли бы на проницаемость рабочего поля, что особенно благоприятно в реализациях фиг. 16-25, в соответствии с которыми устройство позиционирования 14 использует дисплей, помещенный под транспортную поверхность, для определения местоположения объектов.
Среднее наименьшее расстояние между воздушными соплами 20 не может, в частности, превышать ширину полостей 322-9. Преимущественно среднее наименьшее расстояние между воздушными соплами 20 должно быть меньше или равно наименьшей ширине полостей 322-9. В зависимости от перемещения, которое объекту необходимо совершить до позиции назначения, орган управления 18 выбирает для нагнетания сопла, расположенные под соответствующими полостями 322-9.
На фиг. 2-6b боковые усилия для изменения положения объекта, несомого воздушной подушкой, прилагались за счет сжатого воздуха, порождающего такую воздушную подушку путем продува соответствующих пневмокамер или нагнетания воздуха в нужные воздушные камеры.
На фиг. 7 отображен принцип осуществления средства перемещения объекта 16 по горизонтальной поверхности, в соответствии с которым такое средство включает в себя сеть раздельно управляемых воздушных сопел, встроенных в поверхность 12, для образования воздушной подушки 80 между объектом 10 и поверхностью 12, в частности, в месте нахождения объекта 10, а также реализации устройства 82 для бесконтактного горизонтального перемещения и/или вращения объекта 10 на воздушной подушке 80. Для выполнения задаваемой смены позиций объекта 10 на поверхности 12 средство бесконтактного горизонтального перемещения 82 может, например, использовать силы электростатического поля, силы магнитного поля или наклон поверхности 12 относительно гравитационного поля.
При возникновении необходимости перемещения только одного определенного объекта 10 среди нескольких объектов на поверхности 12 возможные версии исполнения средства 82 не ограничены возможностью индивидуально воздействовать на желаемый объект 10. Скорее, при создании локальной воздушной подушки 80 под определенным объектом 10 статическое и динамическое трение, воздействующие иначе на поверхность 12 и объект 10, устраняются, чтобы боковые усилия средства 82 генерировали поперечное перемещение только для заданного объекта 10.
Здесь одна из возможных реализаций средства 82 предусматривает, например, перемещение объекта 10 не за счет возбуждения соответствующих полей, а за счет упорядоченного открывания и закрывания боковых отверстий донных камер конструкции в соответствии с фиг. 3. В дополнение к конструктивному решению фиг. 3 компоновка устройств 842-9 на фиг. 8 предусмотрена для селективного открытия и закрытия отверстий 402-409, которыми может управлять, например, орган управления 18 через беспроводной интерфейс 18. Исходя из приведенного выше описания, орган управления 18 управляет устройствами 84 так, чтобы воздух мог выходить только латерально через нужные отверстия 402-409, а остальной воздух генерировал воздушную подушку 80.
В конструктивной трактовке на фиг. 8 при использовании устройства селективного открытия и закрытия отверстий, сопряженного с каждой из апертур, также возможно задействование воздушных сопел, которые или одновременно управляются, или не управляются, но постоянно одновременно разомкнуты. Если в этом случае на поверхности 12 размещено несколько объектов 10, то управление объектами, которые не должны менять свою позицию, осуществляемое через комбинацию устройств 842-849, ограничивается смыканием всех отверстий и поддержанием этих объектов неподвижно на весу за счет воздушной подушки под ними. Устройства 842-849 открывают одно или более отверстий только у объекта или объектов, которые должны быть перемещены.
В то время как для конструктивных решений, рассмотренных выше в контексте фиг. 2-8, общим является то, что воздушная подушка создается между объектом и транспортной поверхностью, для реализаций, описанных ниже в контексте фиг. 9a-13b эта функция является лишь опцией. Аппаратные версии, обсуждаемые далее, строятся на управлении изменением позиции объекта на поверхности за счет равномерного рядного распределения под транспортной поверхности раздельно регулируемых обмоток электромагнита.
Фиг. 9a и 9b отображают пример транспортной поверхности 12, относительно которой распределена сеть катушек электромагнита 90 так, чтобы магнитный поток, возбуждаемый электрическим током, проходящим через эти катушки электромагнита 90, в основном протекал симметрично оси, перпендикулярно опущенной к поверхности 12. Формулируя иначе, продольная ось катушек электромагнита 90 перпендикулярна поверхности 12. Как показано на фиг. 9a, катушки электромагнита 90, например, вмонтированные в магнитопроницаемый материал-носитель 92. Возможность обособленного управления соленоидами 90 обеспечивается соответствующими контурами и переключателями, которые для упрощения не показаны на фиг. 9a и 9b и которые позволяют индивидуально пропускать электроток через катушки электромагнита 90.
В зависимости от версии исполнения катушки электромагнита 90 могут работать как в режиме двух состояний - токонесущего и нетоконесущего или переменного тока и обесточенного, так и в режиме трех состояний, то есть - обесточенного и двух состояний, отличающихся направлением прохождения электрического тока. Возможны комбинации этих видов управления, например, за счет индивидуального или выборочного подключения катушек электромагнита 90 к источнику напряжения, который, в свою очередь, обеспечивает все обмотки электромагнита 90 в равной степени в зависимости от настройки, заданной органом управления 18, переменным током, постоянным напряжением в одном или постоянным напряжением в другом направлении.
Когда в функции средства 16 перемещения объекта по поверхности (фиг. 1) включено распределение раздельно управляемых катушек электромагнита 90, орган управления 18 способен переместить объект 10 из текущего положения, распознанного и переданного устройством позиционирования 14, в желаемое положение. В связи с этим объект 10 может быть выполнен из магнитопритягивающего или магнитоотталкивающего материала, например, железа, или объект может быть снабжен одним или несколькими магнитопритягивающими и/или магнитоотталкивающими элементами, встроенными в магнитопроницаемый материал.
На фиг. 10a-10споказаны схемы вариантов конструкции объекта 10, выполненного из материала, проницаемого для магнитного поля, в области основания которого встроен магнитопритягивающий и/или магнитоотталкивающий элемент. Материалом, проницаемым для магнитного поля может быть, например, пластик. Согласно фиг. 10a и 10b элемент 100, например, представляет собой постоянный магнит. Например, согласно реализации на фиг. 10c такой элемент представляет собой катушку 110. В дальнейшем будет рассмотрено, как один объект может логически включать в себя несколько элементов 100 или 110, размещенных в различных точках горизонтальной поверхности основания объекта 10. В примерах на фиг. 10a и 10b магнитные полюса постоянного магнита 100 расположены перпендикулярно к транспортной поверхности 12, а на фиг. 10c перпендикулярно этой поверхности расположена продольная ось соленоидов.
Фиг. 10a иллюстрирует, как орган управления 18 может перемещать объект 10 по поверхности 12 за счет отталкивающей силы магнита. Например, орган управления 18 активирует одну из катушек 90 под поверхностью 12 так, чтобы ее северный магнитный полюс был обращен сквозь поверхность 12 к северному полюсу постоянного магнита 100, а именно, чтобы определенная катушка электромагнита 90 из множества катушек электромагнита находилась в положении, смещенном относительно позиции постоянного магнита 100 в сторону, противоположную направлению 112 перемещения объекта 10. Магнитное отталкивание между постоянными магнитами 100 и возбужденными катушками 90 порождает усилие в желаемом направлении 112.
Помимо этого, орган управления 18 предусматривает управление катушкой электромагнита 90, направленной в сторону предполагаемого движения 112 и смещенной относительно постоянного магнита 100 так, чтобы ее магнитный север/юг 90 взаимодействовал сквозь поверхность 12 с противоположными полюсами постоянного магнита 100, и возникающая сила магнитного притяжения генерировала боковое движение объекта 10 в желаемом направлении 112. В случае фиг. 10b орган управления 18 возбуждает тот соленоид 90 из множества соленоидов, который смещен относительно позиции постоянного магнита 100 в направлении корректируемой или сохраняемой траектории 112, которой должен придерживаться объект 10 при движении.
В варианте на фиг. 10c использованы другие возможности управления. При технической возможности в объект 10 встраивают источник тока, не показанный на фиг. 10c, допустим, элемент питания или аккумуляторную батарею, который подает электрический ток в катушку электромагнита 110 объекта 10, благодаря чему объект перемещается как в случаях с постоянным магнитом 100. В таком случае орган управления 18 может осуществлять управление, как поясняется в контексте фиг. 10a и 10b.
Обмотка электромагнита 110 не нуждается в управлении извне, в частности, нагрузкой по току во встроенной батарее объекта или тому подобное и, следовательно, выполнением функций постоянного магнита. Кроме того, концы обмотки электромагнита 110 могут быть замкнуты накоротко через отвод, параллельный катушке 110, или они могут быть электрически соединены друг с другом через полное сопротивление. В этом случае магнитное поле, нарастающее или убывающее в зависимости от поведения катушки возбуждения 90, индуцирует электроток в обмотке электромагнита 110 объекта 10, которая, в свою очередь, генерирует магнитное поле, обратное изменению магнитного поля, то есть - противодействующее магнитное поле в случае нарастания магнитного поля, генерируемого катушкой возбуждения 90, и выпрямленное магнитное поле в случае убывающего магнитного поля, генерируемого катушкой возбуждения 90. Орган управления 18 может использовать этот эффект для управления катушками электромагнита 90', нацеленными в сторону, противоположную нужному направлению 112, смещенными относительно обмотки 110, так, чтобы они генерировали нарастающее магнитное поле в обмотке 110, двигая объекты 10 в желаемом направлении 112 за счет тока, индуцируемого в обмотке электромагнита 110; и для управления катушками электромагнита 90, нацеленными в направлении движения 112, смещенными относительно обмотки 110, так, чтобы они генерировали ослабевающее магнитное поле, которое притягивает обмотку электромагнита 110 и, следовательно, двигает объект 10 в направлении 112. Орган управления может осуществить это, в частности, последовательно управляя катушками возбуждения 90 или 90' таким образом, чтобы под или вблизи обмотки электромагнита 110 объекта 10 с заданным направлением 112 катушки возбуждения, нацеленные в направлении 112 перед обмоткой электромагнита 110, в первую очередь усилили магнитное поле в районе нахождения обмотки электромагнита 110, после чего катушки электромагнита, нацеленные в направления 112 после обмотки электромагнита 110, ослабили магнитное поле в районе нахождения обмотки электромагнита 110. Таким образом, в отличие от вариантов реализации на фиг. 10a и 10b участок возбуждения, начиная с которого орган управления 18 активирует катушки возбуждения 90, не толкает объект 10 перед собой и не тянет его за собой, а циклически проходит рабочую зону, где в текущий момент находится объект 10 на заданной траектории 112.
Перемещение на более длинные расстояния, то есть дальше межвиткового интервала, орган управления выполняет, избирательно активируя катушки так, чтобы позиция, в которой находятся активированные катушки 90, упреждала или запаздывала относительно текущего положения объекта 10, или относительно положения, определенного устройством позиционирования 14 для того, чтобы - как описано выше - „тянуть“ или „толкать“ объект.
Фиг. 11a и 11b еще раз демонстрируют возможные варианты оснащения объекта 10 магнитопритягивающими и/или магнитоотталкивающими элементами, встроенными со смещением относительно друг друга в проницаемый для магнитного поля материал объекта 10. Так, на фиг. 11a две катушечные обмотки 110a и 110b смонтированы с латеральным смещением относительно друг друга, а на фиг. 11b в основание объекта 10 встроены два постоянных магнита 100a и 100b со смещением относительно друг друга, чьи магнитные северный и южный полюса расположены, для примера, симметрично перпендикулярно к опорной поверхности объекта 10. Продольные оси обмоток 110a и 110b также проходят перпендикуляр к поверхности основания объекта 10.
Фиг. 12a и 12b предназначены для иллюстрации способности органа управления 18 генерировать поступательное и вращательное движение объекта 10, в который в соответствии с фиг. 11a и фиг. 10c встроена пассивная обмотка электромагнита или в соответствии с фиг. 11b - магнит, когда используется сила магнитного притяжения между этим магнитом и сетью катушек электромагнита, распределенной по поверхности 12.
На фиг. 12a показана схема объекта 10 в некотором исходном положении, из которого орган управления 18 рассчитывает переместить объект 10 поступательно в направлении стрелок. Предполагается, что на фиг. 12a объект 10 имеет в своем составе четыре постоянных магнита 100a-100d или две обмотки электромагнита 110a и 110b. Расстояние между обмотками электромагнита 110a и 110b или между четырьмя постоянными магнитами 100a-100d подбирают так, чтобы оно соответствовало интервалам между равномерно распределенными катушками электромагнита 90. Допустим, четыре постоянных магнита 100a-100d расположены точно над четырьмя катушками электромагнита 90, как показано на фиг. 12a. При повороте объекта 10 на 90° такое расположение повторится с другими катушками электромагнита 90. Теперь, для инициации движения в нужном направлении, на которое указывают стрелки и их нумерация, орган управления 18 последовательно активирует катушки электромагнита 90, начиная от расположенных под постоянными магнитами 100a-100d или витками обмотки 110a и 110b, в сторону расположенных со смещением от них в заданном направлении, то есть в первую очередь возбуждаются катушки электромагнита, на которые направлены стрелки с номером 1, затем - те, на которые указывают стрелки с номером 2 и т.д. Понятно, что возбуждение соответствующих катушек электромагнита 90 зависит от включенных в конструкцию объекта 10 витков обмотки 110a и 110b или постоянных магнитов 100a-100b, когда возбуждение инициируется за счет изменения напряжения в соответствующих катушках электромагнита 90 или за счет приложения постоянного напряжения, как было описано со ссылкой на фиг. 10a-10c, что означает, что в случае встроенных в объект 10 постоянных магнитов участки возбуждения просто тянут объект 10 за собой, в то время как в случае встроенных в объект 10 обмоток электромагнита управление катушками возбуждения осуществляется во времени, когда ослабленное магнитное поле вблизи обмоток электромагнита объекта 10 за счет силы притяжения обеспечивает движение в нужном направлении (на фиг. 12a вверху справа). В последнем случае уже в предшествующий момент времени катушки возбуждения 90, находящиеся дальше впереди по ходу в намеченном направлении уже настроены, к примеру так, вблизи обмоток электромагнита объекта 10 магнитное поле возрастает, в результате чего возникает отталкивающая сила в требуемом направлении (на фиг. 12a вверху справа).
На фиг. 12b показано то же исходное положение, что и на фиг. 12a, однако, для начала движения и вращения из него объекта 10 орган управления 18 возбуждает другие катушки электромагнита 90. Как на следующем этапе видоизменяется возбуждение активированных в данный момент катушек электромагнита, на фиг. 12b, как и в предыдущем случае, показано стрелками с номером 1. Как видно, результатом является вращение против часовой стрелки.
На фиг. 13a и 13b, как и на фиг. 10a представлена схема движения объекта с использованием магнитного отталкивания. Как и в случае фиг. 11b, на фиг. 13a и 13b в конструкцию объекта включены только два постоянных магнита 100a и 100b. Магнитная полярность идентична полярности на фиг. 10a, то есть магнитные полюса возбужденных соленоидов 90 направлены противоположно по отношению к постоянным магнитам 100a и 100b. На фиг. 13a и 13b также обозначено, в каком направлении должны действовать возбужденные катушки электромагнита 90, чтобы „толкать перед собой“ постоянные магниты 100a и 100b.
Далее, с опорой на фиг. 14 - 15b рассматриваются конструктивные решения средства 16 перемещения объекта по горизонтальной поверхности (фиг. 1), в соответствии с которыми движитель генерирует изгибные или поверхностные волны транспортной поверхности 12. Таким образом, обсуждаемый ниже подход является альтернативой генерации движения с помощью электромагнитных сил в соответствии с фиг. 9a-13b, а в комбинации с воздушной подушкой может использоваться лишь в качестве опции с целью уменьшения массы объекта.
Принцип, на котором построено это техническое решение, проиллюстрирован на фиг. 14. Поверхностная или изгибная волна, распространяющаяся по транспортной поверхности 12, возбуждаемая генератором изгибной волны 141, инициирует эллипсовидное движение 114 поверхностных точек поверхности 12 во времени. Следует подчеркнуть, что на фиг. 14 зафиксировано состояние продольного растяжения поверхности 12 в некий момент времени, а для положения отдельно взятой точки поверхности 140 овалом со стрелками показана траектория движения во времени. Направление движения изгибной волны на фиг. 14 указано стрелкой 142. Как можно видеть, движение точек поверхности 12 происходит на пиках волны 144, на которые опирается объект 10, то есть - в направлении перемещения высшей точки траектории 140 в сторону 146, противоположную направлению распространения волны изгиба 142. Объект 10, главным образом опирающийся на волновые пики 144, таким образом, перемещается в том же направлении 148, что и точки поверхности на пиках волны изгиба, то есть - в направлении 146.
Поэтому в соответствии с реализацией на фиг. 14 в компоновку средства 16 перемещения объекта по поверхности (фиг. 1) включен генератор изгибных волн поверхности 12. Орган управления 18 генерирует изгибные волны согласно пояснению к фиг. 14, перемещая объект 10 в нужном направлении. Применяя известные методики расчета синтеза волнового поля, орган управления 18 может соответствующим образом рассчитать образование волны изгиба.
Фиг. 15a и 15b иллюстрируют возможный способ генерирования изгибной волны в транспортной поверхности 12. Транспортная поверхность 12 образуется плоскостью из листового материала 150, который, к примеру, может быть жестким и светопроницаемым, что позволяет комбинировать различные типы конструкций, обеспечивая работу устройства позиционирования 14, которое использует экран 152, обозначенный на фиг 15a. Кромку 154 плоскости 12 фиксируют по всей длине в опорном устройстве 156 с П-образным профилем рабочей части, применяя адгезив, который, заполняя полости или зазоры между опорным устройством 156, выполняющим роль несущего крепления, и листовым материалом 150, может одновременно служить аттенюатором изгибных колебаний плоскости 150 и скреплять элементы механически и/или объединять или изолировать их акустически. С обеих сторон плоскости 150 друг против друга с упором в противоположные внутренние поверхности 162a и 162b опорного швеллера 156 вводят пьезоэлементы 160, которые передают плоскости 150 механические колебания, направленные перпендикулярно к ее поверхности 12, с возможно минимальным затуханием, как это показано двойными стрелками на фиг. 15a. Пьезоэлементы 160 размещают вдоль среза 154 плоскости 150 на определенном равном удалении друг от друга.
Как показано на фиг. 15a и 15b, в швеллере опорного устройства 156 может быть выполнен паз 164 для заглубления кромки листа 150, где последний затем фиксируют аттенюирующим адгезивом 158 так, чтобы при приложении перпендикулярно к плоскости 150 очень большой силы предотвратить повреждение пьезоэлементов 160 или аттенюирующего материала 158.Говоря иначе, такой паз гасит возвратно-поступательные движения горизонтальной плоскости 150 в вертикальном направлении в области крепления, ограничиваемой гасящим вибрацию материалом 158, с целью предупреждения повреждения пьезоэлементов.
Безусловно, паз 164 может быть выполнен глубже и устьем ближе к наружной части или пьезоэлементам 160 без сохранения свободного объема между плоскостью 150 и внутренними поверхностями 162a и 162b опорного устройства так, чтобы плоскость 150 фиксировалась только пазом 164. В зависимости от таких рабочих свойств листового материала, как жесткость и толщина, подобная компоновка может оптимизировать возбуждение волн изгиба необходимой частоты и амплитуды.
При этом также следует принять во внимание, что существует множество альтернатив подходу, представленному на фиг. 15a и 15b, как в отношении способа возбуждения, где, скажем, вместо пьезопривода возможно задействование электродвижущих приводных механизмов, так и в отношении фиксации или нефиксации кромки плоскости, аттенюации изгибной волны в районе кромки, в частности, амортизирующими материалами или приданием кромке листа соответствующего профиля, в отношении упора и крепления плоскости, допустим, не за счет паза, а за счет гребня и/или пенистого материала, а также в отношении конструкции устройства возбуждения колебаний 160.
Хотя на фиг. 15a показано, что пьезоэлементы 160 установлены с обеих сторон плоскости 150, допустимо, чтобы пьезоэлементы 160 размещались только с одной стороны, например, со стороны транспортной поверхности 12.
Ряд мер предосторожности помогает предупредить возникновение отражения изгибных волн на кромке 154 плоскости 150. Одной из или комбинированной противоотражательной мерой могут являться такие виды обработки кромки 154 плоскости 150, как, например, нанесение покрытия или подбор надлежащего демпфирующего материала 158, или придание профилю кромки конусообразной формы и т.п.
На фиг. 15a и 15b не показано, что плоскость 150 может иметь форму, скажем, прямоугольника или квадрата. Также возможны, например, круглая или другие формы.
Наконец, следует заметить, что волны изгиба не обязательно генерируются в плоских фигурах. Поверхностные волны также могут быть возбуждены в объемном теле, одна сторона которого является транспортной поверхностью.
Вслед за рассмотрением вариантов конструктивных решений настоящего изобретения с уделением основного внимания средству 16 перемещения объекта по поверхности (фиг. 1) далее, в контексте, в первую очередь, фиг. 16-25, будут рассмотрены аппаратные версии устройства позиционирования 14 (фиг. 1), основными компонентами которого являются экран дисплея и встроенный в объект оптический датчик.
На фиг. 16 показано устройство для позиционирования или локализации объекта 601 на дисплее 602. Устройство включает в себя орган управления 613a дисплеем 602, на горизонтальной рабочей плоскости 602a которого отображается меняющаяся информация, и оптическим датчиком 603b, предназначенным для установки в или на объекте 601 с целью оптического сканирования участка 602a' транспортной поверхности 602a, на котором находится объект 601, для актуализации меняющейся информации. Кроме этого, устройство включает в себя блок ориентации 604, 604' для определения местоположения объекта 601 на дисплее 602 в зависимости от результатов актуализации, показанный на фиг. 16 пунктирными линиями и смонтированный внутри или снаружи на объекте и/или вне объекта и отдельно от него.
В дальнейшем более подробно будут рассмотрены возможные способы представления органом управления 603a информации, меняющейся на горизонтальной плоскости дисплея 602, исполнительным устройствам. Например, блок управления 603a может задать дисплею режим 602 регулярного запроса потенциальных мест дислокации или позиций объекта 601 на дисплее 602, управляя дисплеем 602 таким образом, чтобы дисплей 602 отображал оптически различимый пространственно минимизированный признак, распознаваемый на текущем фоне экрана дисплея 602, допустим, такой как постоянно светящийся пиксел, темный пиксел или мерцающий пиксел, который маркировал бы последовательно сменяющие друг друга данные на различных участках горизонтальной рабочей поверхности 602a. Такой маркирующий признак будет перемещаться, сканируя, например, зигзагообразно построчно, весь экран 602. Путем синхронизации последовательной индикации маркеров потенциальных участков локализации, с одной стороны, и данных блока ориентации 604 или 604', с другой стороны, блок ориентации 604 или 604' способен рассчитать положение объекта 601 на дисплее 602, исходя из временной зависимости или соотношения чередующихся индикаций маркера на дисплее 602, с одной стороны, и времени, когда оптический датчик 603b распознает маркеры, то есть - времени, когда маркирующий признак находится в пределах опорного участка 602a' объекта 601 на транспортной поверхности 602a. Если блок ориентации 604 или 604' размещен вне объекта 601, как элемент 604', то может быть выполнена общая временная развертка или синхронизация блока ориентации 604' и органа управления 603a в простом виде, например, обыкновенным хронированием. Более подробные пояснения по данному случаю изложены ниже в контексте прилагаемых далее фигур. Наряду с этим возможен вариант, когда встроенный в объект 601 блок ориентации 604 лишь принимает от органа управления 603a информацию о начале последовательной индикации маркирующего признака, который затем, предположим, циклически, проходит через все потенциальные точки локализации или позиции объекта с заданной скоростью. Для сохранения синхронизации предусматривается выполнение следующего сопоставления. Блок ориентации 604 или 604' и орган управления 603a могут взаимодействовать посредством активного запроса величины яркости, измеренной оптическим датчиком 603b, вслед за каждым перемещением маркера на очередную ожидаемую позицию, после чего сначала маркер перемещается дальше, а затем запрашивается следующий показатель яркости, и т.д.
Помимо вышеописанной процедуры последовательного или циклического опроса о возможном местоположении объекта 601 при последовательном прохождении этих позиций и последовательной индикации маркеров этих позиций существует другой способ локализации объекта блоком управления 603a дисплеем 602, при котором на экране пошагово отображается процедура дихотомической детализации, которая позволяет определять местонахождение объекта 601 за n шагов с точностью до 2-n-ной размеров экрана дисплея 602. Так, блок управления дисплеем 603a сначала делит поле экрана 602 на две половины, каждая из которых содержит изображение, отличное от второго, или отображает на экранном фоне нечто, не совпадающее со второй половиной. На основании результатов стробирования оптическим датчиком 603b блок ориентации 604 устанавливает, какая половина содержит объект 601, вслед за чем вновь делит эту половину пополам и по результатам нового стробирования определяет, в какой четверти экрана дисплея 602 находится объект 601, и т.д. В случае присутствия на дисплее 602 нескольких объектов орган управления 603a подобным же образом делит пополам все сектора, в которых на определенном этапе находится по объекту, продолжая шаг за шагом выполнять операцию двоичного поиска, благодаря чему осуществляется одновременное позиционирование более чем одного объекта при неизменной разрешающей способности. Данный способ локализации в дальнейшем будет детализирован при обсуждении других технических решений. Общая временная развертка для блока ориентации 604 или 604' и органа управления 603a, которая позволяет блоку ориентации шаг за шагом правильно распределять результаты стробирования оптическим датчиком 603b при пошаговой двоичной детализации, может быть выполнена, как и в предшествующей процедуре сканирующего опроса дисплея путем, например, запроса одного или нескольких значений яркости на шаг.
Наконец, для органа управления 603a предусматривается возможность управлять дисплеем 602, который отображает информацию, меняющуюся на горизонтальной поверхности таким образом, что, экстраполируя фрагмент этой информации на участок, сканируемый оптическим датчиком 603b, можно точно определить позицию в пределах площади дисплея 602. Примером этому может служить клетчатая структура изображения на дисплее 602, где шаг рисунка меняется строго единообразно от одного угла экрана 602 к противоположному. В подобном случае нет необходимости в общей временной развертке или синхронизации блока ориентации 604 и органа управления 603a.
Одно из преимуществ установки блока ориентации 604' вне объекта 601 состоит в том, что требования, предъявляемые к рабочим параметрам для распознавания каждого объекта 601, здесь ниже. При беспроводной пересылке информации оптическим датчиком 603b на блок ориентации 604' данные, например, о величине яркости, замеренной оптическим датчиком 603b, могут быть переданы напрямую блоку ориентации 604', который сразу же сличает их с изменяющейся информацией, отображаемой на дисплее 602. Кроме того, возможен вариант, при котором элемент 604 блока ориентации, встроенный в объект 601, уже выполняет предварительную обработку исключительно показателей яркости, предоставленных оптическим датчиком 603b, чтобы передать другому элементу 604' данные, извлеченные из параметров яркости, содержащие, например, время распознавания маркирующего признака, последовательно проходящего по дисплею 602 в области опорного участка 602a. Ниже рассматривается ряд других функциональных возможностей.
Далее, после беглого рассмотрения устройства для отслеживания объекта на поверхности дисплея, с опорой на фиг. 17-20 будет описано игровое устройство, например, для игры в шахматы или т.п., где на плоскости дисплея необходимо отслеживать одну или более игровых фигур, причем желательно, чтобы раскрываемые ниже технические особенности, так сказать, пригодились для устройства, предлагаемого на фиг. 16.
Несмотря на то, что дальше обсуждается игровое устройство, способ позиционирования, применяемый здесь для игровых фигур, может также использоваться в других целях с соответствующими объектами, о чем будет сказано в заключение описания фиг. 16-20.
Игровое устройство на фиг. 17, имеющее единое обозначение 605, включает в свой состав дисплей 610, компьютер 612, приемник 614 и игровую фигуру 616. Компьютер 612 соединен с дисплеем 610 и включает в себя блок управления 618, управляющий дисплеем 610, например, графической картой компьютера 612, и процессор 620, например, ЦП (центральный процессор) компьютера 612, настроенный на выполнение программы и отвечающий за игровые функции игрового устройства 605, что ниже будет описано подробно. Компьютер 612 или процессор 620 далее соединены с приемником 614.
Игровая фигура 16 имеет объемное основание 622, опирающееся во время сеанса игры на экран дисплея 610, перекрывая таким образом фрагмент изображения на нем, то есть участок опорной поверхности.
В игровую фигуру 616 вмонтирован передатчик 624, находящийся на связи с приемником 614 и, кроме того, предусматривающий в момент установки игровой фигуры 616 на поле дисплея 610 считывание элемента изображения на экране под основанием 622 фигуры.
Более того, игровое устройство реализовано с возможностью перемещать игровую фигуру без посредства пользователя, для чего компьютер 612 или процессор 620 предусматривают, в частности, перевод на себя функций органа управления 18 и оснащены средством перемещения 16, сопряженным через орган управления 18 с устройством позиционирования, которое, в свою очередь, состоит из дисплея 610, процессора 620, блока управления 618 и встроенного в объект 616 оптического датчика.
Как схематично показано на фиг. 18, передающее устройство 624, кроме прочего, включает в свою конструкцию передатчик 626, способный посылать ответный сигнал на приемник 614, о чем подробнее говорится дальше, и оптический датчик 628 типа фотоэлемента или фоточувствительной матрицы, которые сориентированы так, чтобы улавливать излучение или свет, попадающие во внутренний объем основания 622. Наряду с этим передающее устройство 624 может включать в себя процессор 630, через который передатчик 626 соединяется с оптическим датчиком 628, хотя, между передатчиком 626 и оптическим датчиком 628 возможно и прямое соединение.
Вслед за приведенным выше описанием отдельных компонентов игрового устройства 605 это устройство будет рассмотрено в действии во время игры с использованием в качестве иллюстрации фиг. 19. Игра может быть, скажем, в шахматы или подобная ей, где, тем не менее, приведенное ниже описание со ссылкой на фиг. 19, ограничено функциональными возможностями процессора 620, куда входит определение позиции игровой фигуры 616 на игровом поле дисплея 610, которую процессор 620 затем использует, в частности, для вычисления дальнейших ходов в игре, для расчета ходов противника и т.п.
В базовом режиме, то есть в исходном состоянии способа согласно фиг. 19, процессор 620 подает блоку управления 618 команду на отображение на дисплее 610 игрового поля. Таким образом, в процессор 620 вводятся параметры игрового поля на дисплее 610. Например, на фиг. 17 поверхность игрового стола состоит из трех игровых полей 632, на которых согласно правилам игры может быть помещена игровая фишка 616. На шаге 634 отображается фоновая заставка экрана дисплея. Затем, блок управления 618 активирует дисплей 610 для наложения на фоновую заставку или на изображение игрового стола специального шаблона испытательной таблицы для игрового поля 632 предполагаемой игры, который должен четко читаться на общем фоне. Так, на шаге 636 блок управления 618 задает дисплею 610 режим поочередного выведения на экран игровых полей 632 и, возможно, циклического, последовательного для каждого поля, поочередного отображения шаблона испытательной таблицы. Визуализация шаблона внутри каждого соответствующего игрового поля 632 может быть минимизирована по площади 638, например, вплоть до одного пиксела данного дисплея 610. Испытательная таблица может отличаться от остального фона, характеризующего данный игровой стол, условным цветом или вариативностью яркости или цветности во времени, что применено в ряде реализаций, описанных далее.
На шаге 636 оптический датчик 628 передающего устройства 624 непрерывно сканирует участок изображения на экране дисплея 610, находящийся под основанием 622 игровой фигуры 616. Как только тестовый шаблон индицируется на шаге 636 в игровом поле 632, на котором находится игровая фигура 616, в выходном сигнале оптического датчика 628 может быть распознан специальный шаблон для процессора 630. Вслед за распознаванием на шаге 640 оптического шаблона процессором 630 он посылает передатчику 626 команду на передачу отклика приемнику 614 через бесконтактный интерфейс 642 (шаг 644). Приемник 614 пересылает отклик на процессор 620. При получении ответного сигнала процессор 620 получает информацию об игровое поле 632, в пределах которого на шаге 636 был выделен контрольный шаблон. Что касается вероятного рассогласования во времени между отображением контрольного шаблона в соответствующем игровым поле 632 и получением информации о передаче ответного сигнала передатчиком 626, то процессор 620 определяет положение игровой фигуры 616 на дисплее 610 на шаге 646.
Передача отклика через бесконтактный интерфейс 642 осуществляется, например, с использованием технологии RFID (радиочастотного опознавания). Однако дальше, от передающего устройства 624 к процессору 18, вновь возможна проводная передача (на фиг. 17 не показано).
Если сигнал, посланный передатчиком 626 на шаге 644, содержит уникальный идентификационный номер, на шаге 646, кроме определения местоположения игровой фигуры, будет идентифицирована строго определенная фигура из множества игровых фигур. Подобный подход позволяет реализовывать такие игры, как, скажем, шахматы, где фигуры имеют разное значение, и, в силу этого, процессор 620 должен их различать.
В случае с шахматами, например, значения уникального идентификационного номера, присваиваемого игровым фигурам для их распознавания, будут находиться в диапазоне между 1 и 32 по числу фигур на шахматной доске.
Поскольку процессор 618 в каждый момент игры „знает“ расположение и вид фигур 616 на доске дисплея 610, имеется возможность быстро продублировать любую сложившуюся игровую ситуацию без необходимости просчитывания всей партии от начала до заинтересовавшей позиции.
При условии, что компьютер 612 или процессор 620 расширены за счет интерфейса последующего обмена данными 648 (например, через модем или сеть), процессор 620 может транслировать на внешнее устройство игровые позиции и идентичность всех фигур, а при необходимости - задний план, отображенный на дисплее 610. Более того, если процессор 620 рассчитан также на прием данных через обменный интерфейс 648, то возможна работа системы в режиме командных соревнований. Предположим, два игрока решившие разыграть партию в шахматы, могут осуществить это, имея с каждой стороны процессор 620, соединенный с противоположной стороной через Интернет с помощью интерфейса обмена данными 648. Каждый игрок будет делать ходы только своими фигурами. Ходы фигурами соперника, находящегося на связи в сети, будет выполнять компьютер с „этой стороны“ с помощью органов 14, 16 и 18. Так, после первого хода одного из игроков новое положение перемещенной фигуры 616 будет локально зафиксировано под игровой доской, функцию которой выполняет дисплей 610, как описано в контексте фиг. 19. Процессор 620 сообщает о новом положении этой фигуры через интерфейс обмена данными 648 и Интернет процессору 620 второго игрока, который, в свою очередь, дает блоку управления 618 команду задействовать средства перемещения для перевода игровой фигуры 616 (скажем, слона, пешки или др.) на доске дисплея 610 второго игрока в новое положение. Затем, второй участник партии может зарегистрировать новую игровую позицию и спланировать свой следующий ход, который, после того, как будет сделан, опять будет сообщен первому игроку согласно описанной выше процедуре. Из этого следует, что компоновка игрового компьютера 605 может быть использована для игры в шахматы как с компьютером, так и с удаленным партнером, причем, фигуры противника будут передвигаться автоматически. Наряду с этим, процессор 620 может следить за соблюдением правил игры и сообщать одному игроку (в партии с компьютером) или нескольким участникам игры (в режиме командной игры) о действиях, нарушающих правила игры.
Хотя пример с шахматами сам по себе подразумевает участие только двух оппонентов, игровое устройство 605 рассчитано также на игры с участием нескольких соперников, соревнующихся между собой, например, такие как настольная игра „Mensch-Ärger-Dich-Nicht“ (вариант настольной игры Ludo дан в приложении).
Следующая версия реализации иллюстрирует возможность применения изобретения для игр-стратегий, где решающее значение имеют не только определение положения и распознавание конкретных игровых фигур, но и их ориентация на игровом поле. Используя игровое устройство и способ, например, описанные со ссылкой на фиг. 5, можно получать точные данные, имеющие стратегическое значение для таких игр, где ведется наступление, отступление или захват в клещи боевых сил. Испытательный шаблон 638, последовательно отображаемый в каждом поле дисплея 610, может, допустим, состоять из 3 x 3 пикселов. Пространственная локализация и идентификации игровой фигуры 616 могут быть выполнены, как описывалось для игры в шахматы. Ориентация игровой фигуры 616 может быть определена следующим образом: за четыре поочередных шага отключается каждый угловой пиксел шаблона 638 (пиксел угла не освещен) и, следовательно, не может быть опознан оптическим датчиком 628 передающего устройства 624.
Оптический датчик 628 передающего устройства 624 настраивают так, чтобы угловой пиксел поля, также размерами 3 x 3 пиксела, был пустым или „слепым“ (т.е. не распознаваемым при сканировании). На каждом из четырех повременных шагов процессор 630, интегрированный в передающее устройство 624, контролирует количество темных (не освещенных) угловых пикселов, обнаруженных оптическим детектором 628. На одном из четырех поочередных шагов отключенный угловой пиксел шаблона 628 совпадет со „слепым“ угловым пикселом оптического датчика 628, что означает, что может быть обнаружен только один темный угловой пиксел. По завершении четырех повременных шагов процессор 630 активирует передатчик 626 на отправку сигнала отклика процессору 620, который содержит данные регистрации единственного темного углового пиксела, обнаруженного за четырехшаговую операцию. Если процессор 620 знает положение слепого пиксела в оптическом датчике 626 относительно фигуры (допустим, „сзади слева“), то на основании отклика может быть определена ориентация игровой фишки 616, поскольку процессор 620 из результатов четырехшаговой процедуры, выполняемой при отображении шаблона 628, извлекает уникальные параметры ориентации игровой фигуры 616 и информацию о том, на каком из четырех последовательных шагов был зарегистрирован единственный темный угловой пиксел. Такой тип распознавания обеспечивает определение четырех направлений ориентации игровой фигуры 616, это - „вперед“, „направо“, „налево“ и „назад“. Возможность применения более тонкой „пикселизации“ или „размывания“ (то есть - увеличения разрешения и уменьшения контрастности) изображения шаблона 638 и оптического датчика 628 позволяет получить еще более точную ориентацию игровых фигур 616.
В другом случае ориентацию игровой фигуры 616 можно определить с помощью передающего устройства 624, направляющего процессору 620 в качестве отклика отчет о распознавании оптическим датчиком 628 испытательного шаблона 638. Процессор 620 может затем рассчитать ориентацию игровой фигуры 616 из принятого ответного сигнала и имеющихся у него данных относительно ориентации шаблона 638 на дисплее 610 путем определения положения изображения шаблона 638, содержащегося в ответном сигнале, предположим, „вверх ногами“.
Несмотря на то, что до сих пор передача ответного сигнала на шаге 644 инициировалась сразу после обнаружения шаблона 638 оптическим датчиком 628, возможен также режим, когда передающее устройство 624 постоянно пересылает процессору 620 изображение, распознанное оптическим датчиком 628, и уникальный идентификационный номер. Тогда процессор 620, например, командует блоку управления 618 циклически индицировать шаблон 638 по одному в каждом из полей 632. В этом случае позиционирование объекта 616 выполняется процессором 620, который регистрирует время появления на изображении, принимаемом от передающего устройства 624, шаблона 638, и, исходя из этого, определяет индивидуальное местоположение объекта 616 в поле 632, в котором был сгенерирован шаблон 638
Как уже сказано выше, функция процессора 630 может быть пропущена в случае, если была послана измеренная датчиком 628 величина, значение которой зависит от параметров падения света на детектор 628. Безусловно, перед пересылкой данных процессор может рассчитать из этой величины другое значение как результат квантования или сопоставления с пороговым значением, и передать блоку ориентации этот показатель. Если, допустим, датчик зафиксировал несколько пикселов изображения, то блоку ориентации посылаются единовременно измеренные величины всех пикселов. Наряду с этим процессор 630 может, например, предварительно вычислить скалярную величину из нескольких измеренных величин пикселов, которую затем передаст на блок ориентации как ответный сигнал.
Несмотря на то, что выше рассматривались только устройства и способы, где процессор 620 инициирует последовательную индикацию блоком управления 618 только одного испытательного шаблона 638 в каждом из полей 632, предусматривается возможность одновременного отображения нескольких разных индивидуально распознаваемых шаблонов 638 в каждом из полей 632 на дисплее 610. В подобном случае определение координат объекта 616 передатчиком 626 возможно за счет непрерывной трансляции изображения, распознанного оптическим датчиком 628, на процессор 620, который затем путем сравнения полученного изображения и всех шаблонов, представленных в полях 632, вычисляет местоположение объекта 616 в поле 632, в котором выделенный шаблон 638 соответствует изображению, содержащемуся в сигнале отклика. При этом тоже возможна ротация принятого изображения процессором 620 с целью согласования данной „картинки“ с шаблоном, отображенным на дисплее 610.
Выше, при обсуждении фиг. 16 - 20, функции блока ориентации 604' на фиг. 16 приняли на себя процессор 620 и процессор 630.
Следует еще раз определенно отметить, что оптический датчик 603b или 628 не должны обязательно предусматривать наличие разрешающей способности по горизонтали. Охват оптического датчика может составлять всего один пиксел, в силу чего он будет измерять в каждый момент времени только одно значение яркости свечения, включая и исключая параметры цветности. В частности, оптический датчик может быть выполнен как одиночный светодиод. В применении фотодиодной матрицы необходимости нет. Объяснение этому вновь будет дано дальше при описании конструктивного решения по игре с несколькими игровыми фигурами с иллюстрацией на фиг. 17. Например, в данном варианте технического исполнения во все игровые фигуры 616 встроен пассивный или полупассивный датчик RFID, включая устройство 626, и при необходимости - 630, к которому подсоединен одиночный фотосенсор, типа фотодиода 628, который, имеет светочувствительную поверхность, по площади превышающую один пиксел дисплея 610. Поскольку игровые фигуры в этом примере могут быть снабжены только одним, достаточно большим, фотодиодом, стоимость игры значительно снижается по сравнению с применением фотодиодных матриц в игровых фигурах 616.
В этом игровом сценарии устройство на фиг. 17, реализуя алгоритм, представленный на фиг. 21, отыскивает игровые фигуры на дисплее 610 и при необходимости определяет их ориентацию. Как показано на фиг. 21, алгоритм запускает (на шаге 660) процессор 620, инструктирующий дисплей 610 компьютера 612 через блок управления 618 о выключении экрана для его затемнения. Вслед за этим (на шаге 662) процессор 620 через приемопередатчик 614 опознает все доступные устройства RFID624 или все задействованные игровые фигуры 616 и регистрирует или вводит в память статус или значение яркости соответствующих фотодатчиков 628, то есть фиксирует, что воспринимает в момент запроса фотосенсор соответствующей рабочей игровой фигуры - темноту или свет. В зависимости от разновидности применяемой технологии радиочастотного опознавания RFID, приведенной здесь, разумеется, только в качестве примера беспроводной связи 642, процессор 620 способен определить, например, от 100 до 1000 устройств RFID и, следовательно, от 100 до 1000 игровых фигур в секунду. Результатом выполнения шага 662 является реестр всех игровых фигур, находящихся в зоне действия приемника 614, независимого от того, размещены они на игровом столе, на дисплее 610 или за их пределами.
Вслед за этим (на шаге 664) процессор 620 компьютера 612 инициирует через блок управления 618 включение (свечения) дисплея 610 и на следующем шаге 666 повторяет поиск всех доступных средств RFID624 или, по меньшей мере, фиксирует статус фотодатчиков 628 охватываемых устройств RFID624. Исходя из этих двух значений яркости каждого из доступных устройств RFID 624, процессор 620 может распознать те игровые фигуры 616, у которых статус или зафиксированное значение яркости соответствующего оптического датчика 628 изменились больше, чем на заданную величину. Такое сопоставление значений яркости до и после включения или начала свечения дисплея на шаге 664 выполняет процессор 620 на шаге 668. Результатом шага 668 является расстановка игровых фигур на игровом столе или на дисплее 610, поскольку предполагается, что игровые фигуры, статус датчика которых изменился, находятся на дисплее 610, в то время как другие игровые фигуры не находятся на дисплее 610 или игровом столе.
Шаги 660 - 668 могут быть выполнены повторно один или несколько раз с целью обеспечения надежности распознавания на шаге 668, причем, поиск или фиксация на шагах 662 и 666, например, могут быть ограничены уже известными элементами RFID. В целом, то есть - с или без повтора, шаги 660 - 668, могут быть выполнены, максимум, в течение двух секунд.
Затем [фиг. 22], процессор 620 компьютера 612 через блок управления 618 пошагово выполняет серию операций деления площади дисплея 610 пополам [670a - 670d], затемняя сначала одну половину 6101и оставляя светящейся вторую половину 6102[670a], после чего, на следующем этапе [670b], выполняет такое же деление, гася половину 6103и оставляя светящейся половину 6104, каждая из которых перекрывает по половине каждой из двух предыдущих половин [6101, 6102], а на следующем этапе [670c] снова делит образовавшиеся четверти 6103 на темную и светящуюся, и т.д. Один из возможных вариантов пошаговой последовательности изображений на экране дисплея 610 показан на фиг. 22, где слева направо для примера даны четыре первых шага 670a, 670b, 670c, 670d поиска делением пополам. Во время выполнения процессором 620 на шаге 670 дихотомического деления он регистрирует каждую отдельную операцию процедуры 670, фиксируя, в какой части экрана - темной или освещенной - по показаниям соответствующего оптического датчика 628 находится игровая фигура. Такова процедура „двоичного поиска“ процессором 620 местоположения игровых фигур 616 на шаге 670 алгоритма. На основании зарегистрированных откликов игровых фигур 616 или на базе зафиксированных значений яркости при каждой из операций деления 670a, 670b, 670c, 670d и т.д. двоичного поиска 670 процессор 620 определяет индивидуальную позицию каждой из игровых фигур.
Или как вариант, процессор 620 может на шаге 670 определять, где расположена какая игровая фигура, выполняя дихотомический поиск в порядке убывания величины освещенной площади, то есть после последовательного гашения или освещения сначала половины, потом четверти, затем одной восьмой и т.д. экрана, процессор затем проверяет, какие игровые фигуры зарегистрированы освещенными или темными. Что касается поиска в каждом из полей каких бы то ни было малых размеров или известных конфигураций, то здесь требуется только более скрупулезное обследование участка поверхности, на котором расположены объекты, и двоичный поиск на шаге 670 не слишком затратен по времени.
Как видно на фиг. 22, деление поверхности на светлые и темные участки на каждом следующем этапе дихотомического поиска 670 становится все более мелким. В принципе, тонкость такого дробления может достигать разрешающей способности в пикселах. Практически, членение может быть настолько мелким, что разделенные световые участки на определенном этапе могут стать по площади меньше, чем оптические датчики 628 игровых фигур 616, то есть - меньше площади основания или опорной поверхности фигур 616, когда процессору 620 по данным регистрации полученных откликов или значений яркости для каждой операции с 670a по 670d придется определять границы объектов 616 и, в частности, границы светочувствительных областей соответствующих оптических датчиков 628.
Итак, результат выполнения шага 670 состоит в пространственной локализации игровых фигур 616 на горизонтальной поверхности экрана дисплея 610.
Теперь, на следующем шаге 672, процессор 620 может уделить особое внимание тонкому сканированию каждой позиции игровой фигуры, определенной в результате шага 670, с целью точного определения площади светочувствительной зоны оптических датчиков 628 игровых фигур 616 на экране дисплея 610. Сканирование может обеспечиваться, например, только одним пикселом или одной световой точкой. Например, перед фотодатчиком 628 каждой игровой фигуры 616 можно установить фотошаблон подходящей геометрической формы, причем вернуть шаблону его исходную форму можно простым вращением в плоскости экрана больше, чем на 90° или, допустим, на 360°. В этом случае сканирование на шаге 672 поможет определить не только местоположение, но и направление ориентации фигуры 616. Например, запрос устройствам RFID626, встроенным в игровые фигуры 616, может быть послан индивидуально и с высокой частотой через приемопередатчик 614. Практически, на шаге 672 за одну секунду может быть выполнено более 100 операций считывания, то есть высокоточное сканирование осуществляется быстро и неощутимо для пользователя. Точное сканирование на шаге 672, фактически, ограничено местом положения игровой фигуры. Вычислительные затраты по распознаванию соответствующего шаблона для плоскостного разрешения фотошаблона могут быть отнесены, как описано выше, на счет компьютера 612 или процессора 620, при этом датчики будут только транслировать значения яркости. Игровым фигурам 616 необходимы только фотошаблоны или должным образом сконфигурированные фотодатчики 628. Если правила игры не требуют соблюдения ориентации игровых фигур, могут быть применены круглые фотодатчики или круглые фотошаблоны.
На фиг. 23 показано, что игровая фигура 616 может включать в состав элементов своего оборудования в полости основания 622 линзу 690, например, полимерную, выполняющую функцию адаптации пикселов 692 изображения дисплея 610 для оптического датчика 628 или для его фотошаблона (не показан) с целью улучшения оптических характеристик. Так, линза 690 сокращает расстояние между объемом основания 622 фигуры 616 и элементами изображения (пикселами) 692 дисплея 610, которое образуется защитным экраном 694, помещенным между экраном дисплея или дисплеем 610 и игровой фигурой 616 для защиты светопроницаемого экрана 610 от механических повреждений и пр. Использование линзы 690, наряду с этим, способствует уменьшению негативного эффекта от загрязнения подошвы 622 игровой фигуры 616, поскольку загрязняющие частицы находятся не в плоскости объекта, а на расстоянии от плоскости линзы.
Логично заключить, что конструктивное решение, рассмотренное с использованием фиг. 21 - 23, может быть реализовано таким образом, что описанное выше распознавание тестовых шаблонов будет выполняться элементами оснастки игровых фигур, то есть процессором 630.
Наконец, следует обратить внимание на то, что движение одной или множества игровых фигур на дисплее 610 можно отслеживать непосредственно во время их перемещения по поверхности игрового поля на дисплее 610. Для этого сканирование (сопровождение) игровых фигур или объекта рекомендуется, например, вести с достаточно высокой частотой. За счет этого хорошо распознаются как горизонтальные смещения от вертикальной оси, так и вращения вокруг нее. Благодаря этому траекторию движения игровых фигур можно фиксировать и в том случае, когда их передвигает горизонтально по игровому полю или дисплею 610 пользователь.
Далее и в завершение, фиг. 24 должна однозначно показать, что передающее устройство 624, не будучи сопряженным с конкретной игровой фигурой 616 жестко, тем не менее, может быть индивидуально с ней ассоциировано. В соответствии с фиг. 24 передающее устройство 624 встроено, допустим, в основание 700, в которое может быть вставлена, посажена на резьбу или вмонтирована любым другим способом игровая фигура 616. В заключение, на фиг. 25 дан вид сверху одной из возможных компоновок панели 710, которая покрывает светочувствительную область оптического датчика, например, фотоэлемент, и имеет просвет 712, открывающий наиболее эффективную фоточувствительную зону оптического датчика 628, поскольку только через нее свет дисплея может падать на детектор 628. Наряду с этим в качестве примера показано, что площадь зоны 712 может превышать размеры пикселов, обозначенных на фигуре общей ссылкой 714. Конечно, сам датчик тоже может быть выполнен в форме 712, тогда панель можно будет исключить. Панель, показанная на фиг. 25, способствует описанному выше точному определению положения и ориентации, например, сканированием района вокруг просвета 712 с разрешением всего в один пиксел 714, попеременно гаснущий и загорающийся. За счет этого блок ориентации способен устанавливать все пикселы 714, которые перекрывают поле 712 в большей степени, чем предполагалось. Ответный сигнал, передаваемый детектором 628 через передатчик на блок ориентации, является двоичным и показывает, не превышает ли измеренное значение яркости расчетную величину, соответствующую расчетной степени одномоментного перекрывания, например, в момент запроса. Понятно, что ответный сигнал также может служить показателем яркости на более конкретных стадиях.
В процессе предшествующего рассмотрения фиг. 16 - 25 наличие средства перемещения 16 и органа управления 18 было обозначено лишь схематически. Тот факт, что конструктивные решения, представленные выше в контексте фиг. 2 - 16, весьма хорошо сочетаются с вариантами конструкции, отображенными на фиг. 16 - 25, станет очевидным дальше, при рассмотрении фиг. 26a и 26b, которые иллюстрируют реализацию комбинированных аппаратных версий, сочетающих в себе средства отображения устройства позиционирования, показанные на фиг. 16 - 25, и предшествующие технические решения средства перемещения 16.
Как описано раньше, рабочая плоскость может быть выполнена из прозрачного или светопроницаемого материала с встроенными в нее раздельно регулируемыми клапанами сопл, что отображено на фиг. 2 - 8. На фиг. 26a показано, как такая структура может быть совмещена с оборудованием фиг. 16 - 25 с использованием пневмоклапанной мембраны 800, устанавливаемой над дисплеем 802, конструкция которого, в свою очередь, может включать в себя защитную панель 804 и соответствовать техническим решениям экрана дисплея, представленным на фиг. 16 - 25. Между пневмоклапанной мембраной 800 и экраном дисплея 802 сохранено полое пространство 806, выполняющее роль камеры повышенного давления, из которой сжатый воздух пропускается через активируемые воздушные клапана мембраны 800 в область транспортной поверхности 12. Светопроницаемость всех надэкранных слоев гарантирует наблюдателю четкую видимость изображения на дисплее 802, формируемого из пикселов 808, сквозь прозрачную защитную панель 804, сквозь пневмокамеру 806 и через пневмоклапанную мембрану 800, внешняя сторона которой направлена в противоположную от дисплея 802 сторону и образует транспортную поверхность 12. Оптический датчик, о котором уже шла речь, встроенный в придонную часть основания объекта, как показано в примерах на фиг. 3 или 8, предусматривает считывание через одну из объемных полостей, допустим, центральную, меняющейся в горизонтальной плоскости информации, отображаемой дисплеем 802, и в соответствующем случае передает результаты сканирования с помощью передатчика.
На фиг. 26b на поперечном разрезе объекта или игровой фигуры дан пример компоновки оптического датчика в соответствии с фиг. 23.
Фиг. 26b демонстрирует возможность интегрирования конструктивных решений, соответствующих фиг. 2 - 8, 9 - 13b и 16 - 25. [На фиг. 26c] дисплей 802 также отделен пневмокамерой или слоем воздуха под давлением 806 от пневмоклапанной мембраны 800, верхняя сторона которой образует транспортную поверхность 12. На внутренней плоскости дисплея 802, обращенной в противоположную от клапанной мембраны 800 сторону, смонтирована плоскость с батареей катушек электромагнита [810], которая может быть выполнена в соответствии с фиг. 9a. Управление объектами, висящими на воздушной подушке, может осуществляться электромагнитным приводом за счет батареи катушек электромагнита 810, при этом положение объекта будет определяться устройством позиционирования с использованием дисплея 802.
На фиг. 15a уже была продемонстрирована возможность объединения технических решений фиг. 16 - 25 и вариантов конструкции на фиг. 14 - 15b, при котором дисплей просто устанавливается под поверхностью изгибной волны. Здесь следует обратить внимание на возможность возбуждения изгибной волны в плоскости из листового стекла, имеющей в соответствии с версией фиг. 6a и 6b отверстия для воздушных клапанов, благодаря чему варианты компоновки фиг. 2 - 8 могут быть скомбинированы с вариантами на фиг. 14 - 15b, то есть - с объединенным техническим решением фиг. 16 - 20.
Иначе говоря, рассмотренные выше конструктивные решения позволяют игровому компьютеру перемещать пассивную игровую фигуру на игровом столе в управляемом и „свободном“ режиме с учетом положения и ориентации игровой фигуры. Кроме этого, предусматривается возможность направленного приложения силы к игровой фигуре, когда место, направление и мощность такой движущей силы регулируются в определенных рамках в пределах плоскости игрового поля. Возможно также вращение игровых фигур на месте. Для этого к объекту прилагаются два вектора силы, возникающие за счет противодействующих друг другу в пределах игровой поверхности элементов, воздействующих на разные точки фигуры, как показано на фиг. 4b и 6b, 12b и 13b. Если необходимо переместить несколько фигур одновременно, к ним должно быть приложено в n раз большее количество векторов, которые также требуют управления, что, однако, на практике не составляет проблему.
Физические характеристики разных игровых фигур могут в той или иной степени различаться, например, их трение о поверхность игрового стола, их масса и т.д. Эта задача, тем не менее, легко решается, так как орган управления задействует механизм обратной связи, при котором, соответственно, учитываются текущее местоположение и ориентация игровых фигур, и при необходимости эти данные поступают на игровой компьютер.
Следовательно, рассмотренные выше варианты технических решений отвечают требованиям игровых устройств, где часто прилагается большое количество векторов силы, которые требуют при этом легкости управления с учетом точки приложения, направления и величины. В описанных реализациях изобретения использован тот принцип, что управление названными переменными не должно зависеть от случайного выбора разрешающей способности. Предпочтительнее варьировать шаг квантования в зависимости от свойств конкретных игровых фигур, например, от их размеров. Допустим, если диаметр самой маленькой из используемых фигур составляет 10 мм, то для управления вектором силы будет достаточно, например, разрешающей способности в одну четвертую этого диаметра, то есть, в данном случае - 2,5 мм. Точные показатели зависят от условий практической реализации.
Величина вектора силы, действующей на фигуры, также может быть определена органом управления. На выходе замкнутого рабочего цикла устройство позиционирования выдает результат, куда входят управляемая переменная положения или скорости объекта или игровой фигуры и управляемые переменные направления и „мощности“ вектора силы. Орган управления может задействовать ПИД (пропорционально-интегрально-дифференциальный) регулятор, который, в свою очередь, должен обеспечить сбалансированность прилагаемого вектора силы так, чтобы движение игровой фигуры было максимально равномерным при одновременном устранении или минимизации побочных воздействий на другие игровые фигуры. Например, орган управления может наращивать величину приложения вектора силы от минимального значения до начала движения игровой фигуры и затем поддерживать этот уровень, или даже уменьшить его после преодоления статического трения. В частности, квантование силы осуществляется путем введения дополнительных воздушных клапанов в конструкции фиг. 2 - 8, или даже путем дозирования давления воздуха, подаваемого на пневмоклапаны. Интенсивность изгибных волн также управляема. И, наконец, ток, проходящий по обмоткам электромагнита в аппаратных версиях на фиг. 9a - 15b, тоже поддается регулированию.
Устройство позиционирования может в течение игры контролировать положение неподвижных фигур, а в случае необходимости орган управления может приложить необходимые дополнительные векторы силы для удержания таких фигур на месте.
Итак, рассмотренные выше технические решения продемонстрировали три разных практически реализуемых способа приложения упомянутых векторов силы. Во-первых, это изгибные волны, возбуждаемые в светопроницаемой, по возможности тонкой плоскости, например, из листового оргстекла (перспекса), которая может покрывать игровое поле, в частности, экран дисплея, как в случаях фиг. 16 - 25. Во-вторых, это - магнитные поля, генерируемые матрицей электромагнитов, размещенных под экраном, служащим игровым полем. Наконец, это - сжатый воздух, проходящий через управляемые пневмоклапаны, встроенные, например, в тонкое светопроницаемое листовое покрытие игрового поля, предпочтительно защищающее участки, где движутся игровые фигуры. Наряду с этими описание касалось и других вариантов реализации, в которых так или иначе использовались указанные выше физические явления.
В зависимости от дополнительных условий, в частности, типа, формы и размера перемещаемых игровых фигур при реализации предпочтительно задействовать одну или одновременно несколько названных источников прилагаемой силы или энергии, а именно - волны изгиба, магнитные поля или сжатый воздух, как указывалось выше. Так, например, с помощью сжатого воздуха, а именно - за счет создания эффекта воздушной подушки, снижается сила трения под фигурой или на определенном участке игрового поля для последующего перемещения этой фигуры по данному участку с использованием магнитного поля, что в комбинации показано на фиг. 26c.
Таким образом, без дополнительных аргументов понятно, что рассмотренные выше конструктивные решения могут использоваться при создания игр, в особенности - настольных. Тем более они могут использоваться для компьютерных игр, где игровой компьютер оперативно автоматически будет двигать реальные фигуры по игровому столу, причем, без вмешательства человека.
Как показано и описано выше, реализуемые аппаратные версии могут комплектоваться экраном, выполняющим роль игрового стола, на котором компьютер может автоматически определять позицию фигур в игре.
Благодаря представленным выше техническим подходам решены также задачи, часто связанные с играми, а именно - необходимость перемещения нескольких игровых фигур одновременно. Представляемые в данном изобретении конструкции не нуждаются в каких-либо подвижных элементах.
Обращая внимание на компоновку на фиг. 14 - 15b, следует вновь подчеркнуть, что предпочтительно применение тонколистового материала. Поскольку [на волне изгиба] любая точка плоской поверхности движется по эллиптической траектории, при которой на пике волны движение направлено в одну сторону, а на подошве волны - в противоположную сторону, то возникает возможность перемещения объекта, опирающегося на пиковые точки поверхностной волны в нужном направлении, то есть - за счет воздействия на объект, в частности, игровую фигуру, контактирующий большей частью с пиковыми точками изгибной волны, силы трения, направленной в сторону движения поверхностных точек пика волны.
Орган управления может регулировать форму волны в плоскости с точностью, достаточной для того, чтобы под каждой перемещаемой игровой фигурой в заданном направлении проходили пики волн большой амплитуды, а под фигурами, которые не должны двигаться, амплитуды пик волн оставались незначительными. Посредством подобных манипуляций орган управления может индивидуально передвигать желаемые объекты или устанавливать их в желаемое положение. Для вращения объекта или игровой фигуры орган управления может, например, сгенерировать с противоположных краев опорной поверхности встречные цуги волн за счет чего на объект начинают действовать противоположно направленные силы. В этом отношении орган управления может использовать синтез волнового поля, чтобы генерировать почти неупорядоченное волновое поле. Такой синтез волнового поля достаточно хорошо известен из области акустики. Для этого, как уже описывалось выше в контексте фиг. 18a и 18b, транспортная поверхность может быть окружена большим количеством генераторов изгибной волны, таких как пьезоэлементы, каждый из которых возбуждает головную волну или элементарную волну которые перекрывают желаемое волновое поле согласно принципу Гюйгенса.
Предпочтительно, чтобы генераторы изгибной волны были установлены не ближе определенного минимального расстояния друг от друга. Такой минимальный интервал может зависеть от частоты, с какой генератор изгибной волны генерирует волны изгиба. При проектировании органа управления 18 следует учитывать, что действие принципа синтеза волнового поля сохраняется для твердых тел и для ультразвукового диапазона. Так, длина волн изгиба может быть меньше размеров перемещаемых игровых фигур или объектов. Например, источники звука, такие как уже упомянутые пьезоэлементы, создают надлежащее волновое поле с цугами волн достаточно высокой частоты в тонкой плоскости, вдоль кромки которой источники звука размещены на определенном малом расстоянии друг от друга. Согласно данным выше пояснениям здесь рекомендуется для предотвращения на срезе плоскости нежелательных отражений установить ограничения за счет акустического волнового сопротивления. В зависимости от приложения достаточным может быть меньшее количество генераторов изгибной волны, установленных через больший интервал друг от друга. Иными словами, в зависимости от применения вполне отвечать требованиям может волновое поле, образованное сокращенным числом элементарных волн или меньшим количеством генераторов изгибной волны.
На фиг. 26c также отражена возможность размещения под дисплеем или под тонкой плоской панелью, отображающей игровое поле, матрицы индивидуально управляемых малогабаритных витков электромагнита, ориентированных вертикально относительно игрового поля. Благодаря этому при соответствующем манипулировании такими обмотками электромагнита внутри игровой плоскости может быть генерировано управляемое магнитное поле. Последнее может использоваться „квазистатически“ или же, согласно принципам линейного электродвигателя, для передвижения игровых фигур, что было отображено в качестве реализации на фиг. 10c. Игровая фигура на фиг. 26b, к примеру, может использоваться в такой реализации, если будет включать в комплект своей оснастки притягиваемый или отталкиваемый магнитом элемент согласно одной из фиг. 10a - 10c.
При квазистатическом подходе, например, в игровые фигуры встраивают небольшие постоянные магниты, и задействуют обмотки электромагнита, смонтированные под игровым столом, для приложения к этим постоянным магнитам тягового или сдвигающего усилия. В результате возникают вектора силы, и при достаточной частоте растра и точности регулирования витков соленоидов, а также при обеспечении устройством позиционирования надлежащей обратной связи, о которой говорилось выше, можно достичь желаемой подвижности фигур в игре. Если в игровую фигуру встроено два или больше постоянных магнитов, направленных в разные стороны игрового поля, как проиллюстрировано выше в контексте фиг. 12a - 13b, такую фигуру можно свободно вращать или поворачивать, если воздействовать не нее с двух сторон в нужном направлении толкающим или тянущим магнитным полем. При соответствующей отладке игровой фигуры, эффект сдвига также можно использовать, допустим, для уменьшения массы фигуры, покоящейся на подошве или основании, способствуя сдвигающему или тяговому усилию, прилагаемому к фигуре магнитом, расположенным ниже центра тяжести фигуры.
При подходе с использованием линейного электродвигателя, как на фиг. 10c, в игровых фигурах монтируют малогабаритные электромагнитные катушки, выполняющие роль „роторной обмотки“, где ток индуцируется изменениями магнитного поля. Катушки электромагнитов под игровым столом являются катушками возбуждения, которые генерируют подвижное магнитное поле, оказывающее воздействие на витки ротора. Выполненные надлежащим образом катушки возбуждения, например, с соблюдением требуемого расстояния до обмоток ротора и при достаточной „разрешающей способности“ матрицы катушек возбуждения, способствуют прямому взаимному разделению сил на индивидуальных роторных витках для выполнения контролируемых индивидуальных движений игровых фигур. Другая версия реализации состоит в том, чтобы выполнить витки ротора 110 внутри игровых фигур „коммутируемыми“ и за счет этого сделать обмотку ротора раздельно активируемой, например, таким образом, чтобы переключатель или регулируемое сопротивление подключались к ответвлению параллельно реальной обмотке 110. Подвижное магнитное поле может быть расширено, что облегчает настройку матрицы возбуждения или матрицы катушек электромагнита. Путем выбора соответствующих роторных витков можно двигать и вращать нужные фигуры.
Перемещаемые игровые фигуры или объекты могут получать индивидуальные команды извне, например, от органа управления, на размыкание или замыкание соответствующих коммутирующих элементов или роторных обмоток.
Технические решения, представленные на фиг. 2 - 8, относятся к устройствам, действующим по принципу „зависания“ на воздушной подушке. В соответствии с этим принципом воздух для воздушной подушки поступает через множество тонких отверстий или пневмосопл опорной плоскости. Как говорилось выше, такая плоскость может представлять собой лист светопроницаемого материала, помещенный над игровым полем, например, над дисплеем. Над этой плоскостью зависают соответствующие объекты, допустим, игровые фигуры. Воздушная подушка под объектом устраняет трение между ним и несущей поверхностью, после чего объект может быть легко перемещен в одном из направлений.
Ранее описаны возможные варианты совмещения эффекта воздушной подушки, уменьшающей силу трения, с другими физическими явлениями и силами, обеспечивающими движение. Вместе с тем, воздушные сопла, встроенные в несущую плоскость, могут выполнять роль движителя, генерируя движение за счет их индивидуального открытия и закрытия с подачей воздуха в основания игровых фигур, имеющие специальную конфигурацию, как описывалось при рассмотрении фиг. 2 - 8.
Светопропускающим материалом опорной плоскости со встроенными раздельно регулируемыми пневмоклапанами, о котором уже упоминалось несколько раз, может быть тонкий, не проводящий электричество листовой полимер. В листе такого неэлектропроводящего полимера, например, с помощью лазера прорезают очень узкие короткие щели, которые могут выполнять функции раздельно регулируемых воздушных клапанов. За счет электростатических сил эти щели могут находиться в открытом или закрытом состоянии. Указанные прорези могут быть покрыты прозрачным проводящим материалом, а в дальнейшем - слоем прозрачного неэлектропроводного материала. Таким образом, стенки прорезей, в сущности, образуют „пластинчатый конденсатор“. В последующем на верхней и нижней поверхностях опорной плоскости из прозрачного материала может быть установлена матрица токопроводящих дорожек и транзисторов таким образом, что любая из стенок каждой из прорезей может быть индивидуально отслежена и заряжена.
Если стенки щелей в текущий момент заряжены однополярно, они взаимно отталкиваются и открывают воздушный клапан, если же они имеют противоположные заряды, они взаимно притягиваются и сохраняют клапан закрытым, как описано выше. По возможности предпочтительно, чтобы плоскость при этом была достаточно эластична.
Возможен вариант решения, в соответствии с которым электростатические клапаны образуются двумя слоями фольги, лежащими друг над другом.
Другой вариант опорной плоскости может обеспечивать горизонтальное перемещение игровых фигур за счет движущих сил, вырабатываемых управляемыми пневмоклапанами. Одно из возможных конструктивных решений, описанных выше, предусматривает разделение нижнего объема фигуры перегородками на изолированные отсеки. Через воздушные клапаны воздух может подаваться в отсеки раздельно. В центре фигуры может быть выгорожена полностью изолированная камера, за счет которой формируется несущая воздушная подушка. Вокруг такой камеры могут располагаться отсеки, перегородки которых не сплошные. Устье проема в перегородке образует „реактивное сопло“, которое при подаче воздуха в зависимости от своей геометрии может создавать продольную или поперечную тягу. В этой связи следует вновь сделать ссылку на описание фиг. 3, 4a и 4b. Для перемещения фигуры сначала центральную камеру наполняют воздухом для образования несущей воздушной подушки, ослабляющей силу трения, затем, в один или несколько других отсеков подают воздух для создания тяговой силы в определенном направлении прямолинейного или вращательного движения.
Таким образом, благодаря описанным выше конструктивным решениям отпадает необходимость применения роботов-манипуляторов для захвата и перемещения объектов на поверхности. Активные подвижные элементы для игровых фигур не требуются. Векторы силы формируются без посредства подвижных элементов, за исключением вышеуказанных случаев с электростатическими пневмоклапанами или пьезоэлементами для генерации изгибной волны. С помощью предлагаемых версий исполнения вращаться или перемещаться могут одновременно несколько фигур. Генерация вектора силы может выполняться исключительно „снизу“. Благодаря этому, пространство над игровым полем или над транспортной поверхностью остается свободным. В частности, представленные выше аппаратные версии делают игру „осязаемой“ со стороны игрового компьютера как партнера. Компьютер может распознавать ходы человека и делать ответные ходы за себя или за удаленных игроков непосредственно реальными игровыми фигурами. Воплощена может быть любая игра, в которой правилами предусматривается наличие игрового поля и фишек игроков.
В отношении раздельно управляемых воздушных клапанов необходимо обратить внимание на то, что используемый материал, например, кремний (силикон), предпочтительно должен быть достаточно эластичным, чтобы эффективно обеспечивать размыкание и смыкание воздуховодов. Как уже говорилось ранее, прилагаемое усилие может создаваться за счет электростатической силы благодаря наличию электрических полей. В результате обкладка конденсатора может быть прозрачной. В зависимости от практического приложения может быть достаточно одного электрода или одной пластины обкладки конденсатора для каждого раздельно регулируемого клапана, если, например, в качестве другой пластины обкладки конденсатора или другого электрода будет введена область с постоянно заряженным участком или с одной постоянно заряженной стенкой щели индивидуально регулируемого пневмоклапана. Как уже предлагалось выше, воздушные клапаны могут быть выполнены из кремния (силикона) и встроены в опорную плоскость из твердого материала, например, из листового стекла, с отверстиями по размеру клапанов. Коэффициенты преломления кремниевых клапанов и стекла подбирают так, чтобы они совпадали, допустим, 1,43. Следовательно, можно обеспечить оптическую плавность перехода границы между стеклом и кремниевыми клапанами без нарушения светопроницаемости.
Из варианта реализации, рассмотренного на примере фиг. 14 - 15b, известно, что движение может быть генерировано также за счет стационарной волны. Орган управления может управлять средством перемещения 16 таким образом, чтобы перемещаемый объект или игровая фигура с надлежащей геометрией основания находились во впадине стоячей волны. Если стоячая волна затем начнет медленно двигаться, предположим, за счет плавного регулирования фазы одного из генерирующих волновых цугов, игровая фигура начнет перемещаться в горизонтальной плоскости между пиками волн. Если вблизи игровой фигуры находятся обособленные зоны сложных конфигураций, фигуре может быть придано вращательное движение посредством двух разных стоячих волн.
В зависимости от условий практического применения описанные выше способы могут быть реализованы в аппаратных или программных средствах, что касается, в частности, алгоритмов локализации и идентификации объектов на плоскости дисплея или техники перемещения объектов по горизонтальной плоскости. При техническом исполнении могут быть использованы цифровые носители и накопители данных, такие, в частности, как гибкий диск, CD, DVD, хранящие электронно-считываемые сигналы управления и взаимодействовать с программируемой компьютерной средой таким образом, чтобы мог быть осуществлен соответствующий способ. Таким образом, в целом, изобретение представляет собой программный продукт или компьютерный продукт или программные средства с программным кодом на машиночитаемом носителе для осуществления способа, представленного в настоящем изобретении, при условии реализации данного программного продукта с использованием компьютерной или процессорной техники. Определяя иначе, изобретение может быть реализовано как вариант цифрового носителя средств управления компонентами системы с программным кодом для осуществления представляемого способа при условии выполнения с использованием процессорной техники. В качестве процессора здесь может быть задействован компьютер, микропроцессорная карта, игровой компьютер или другие интегральные схемы.
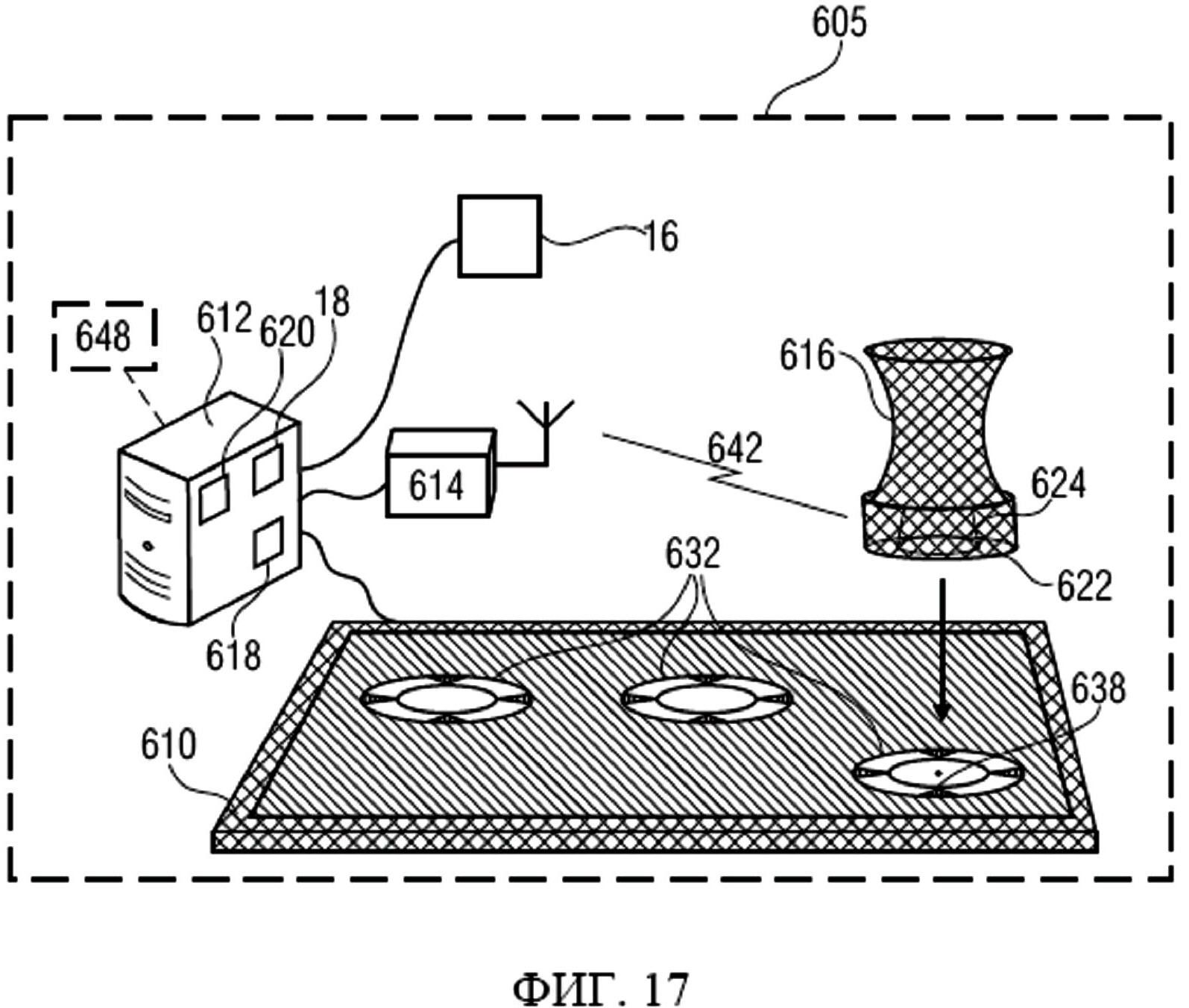
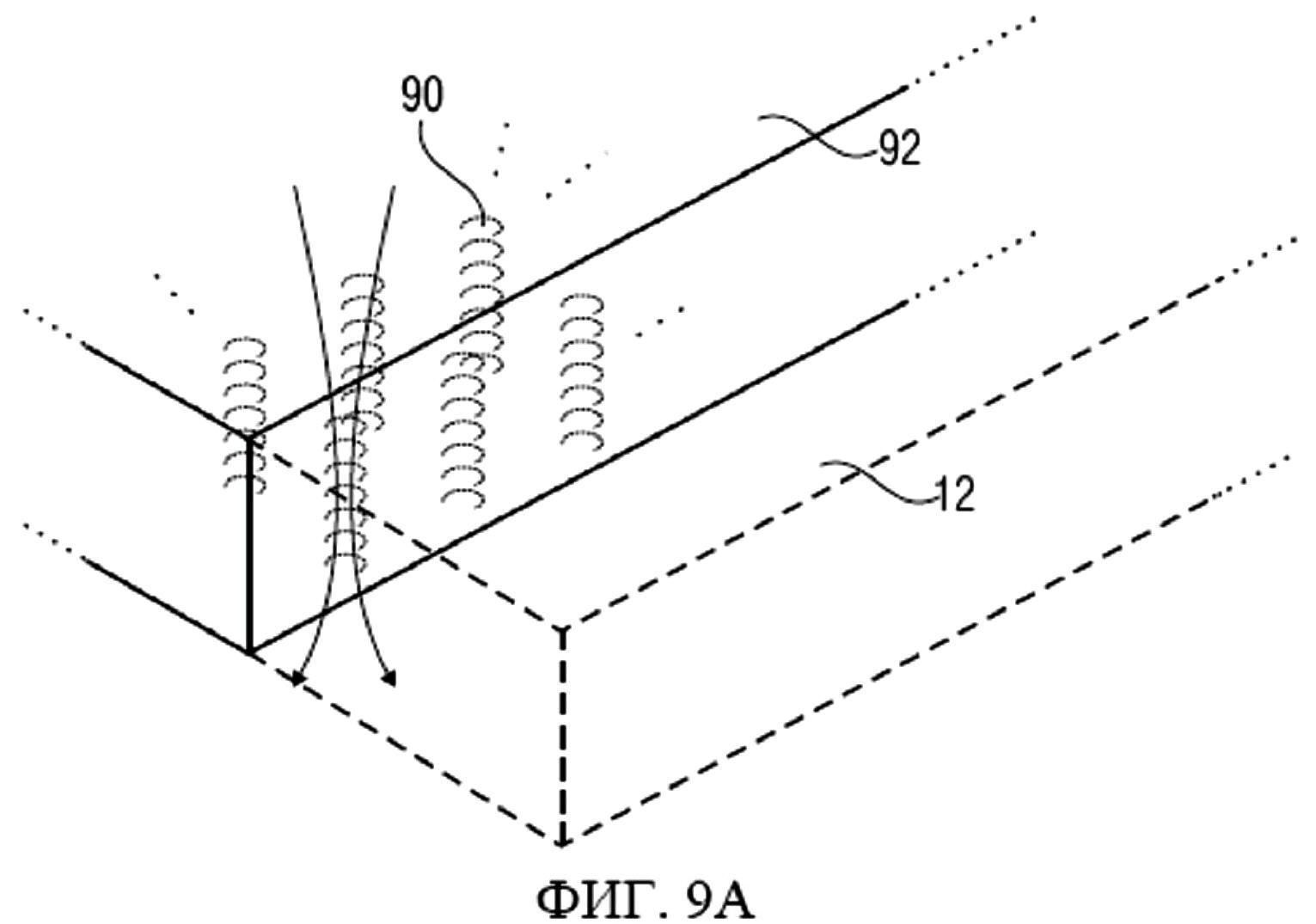
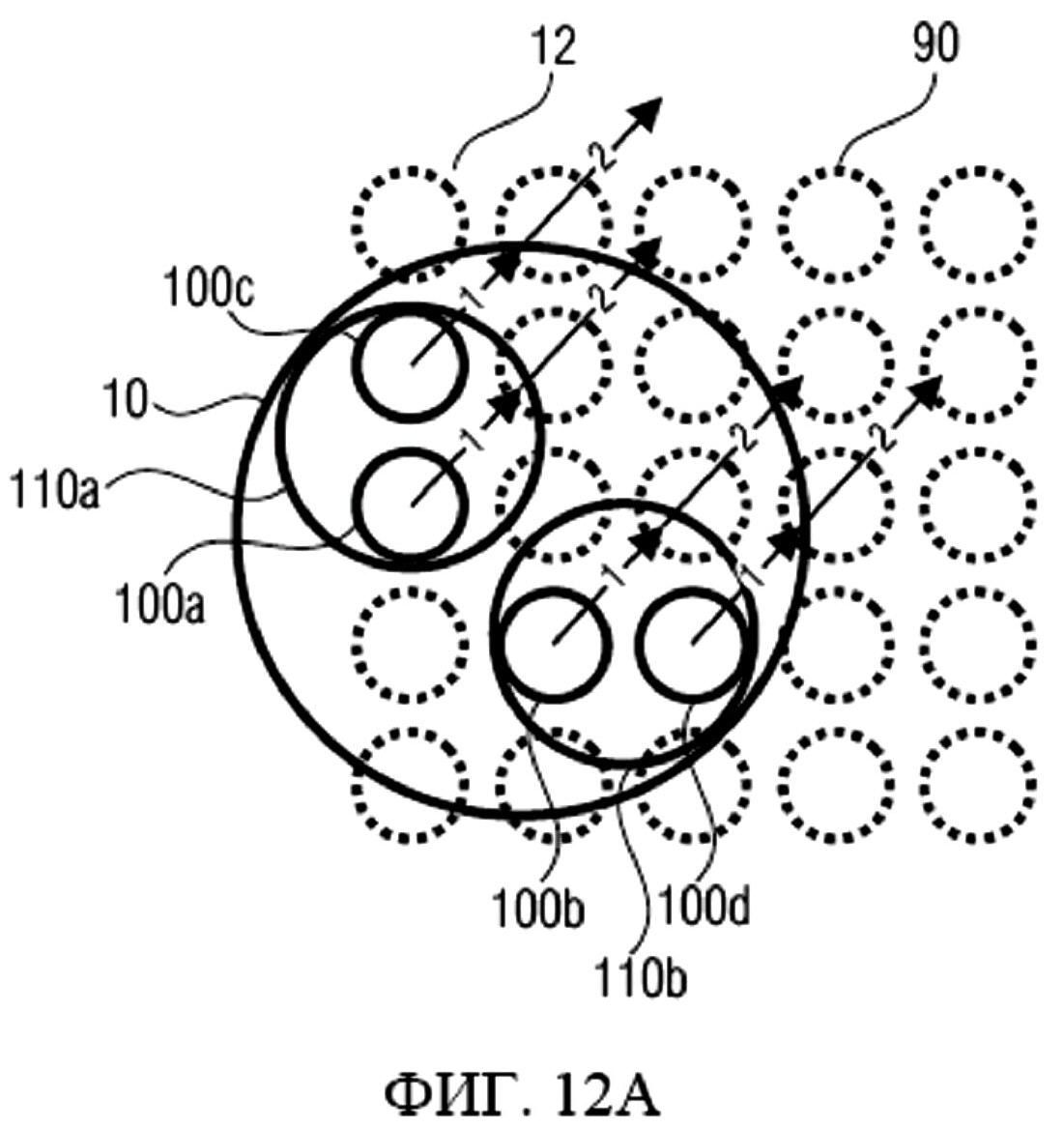
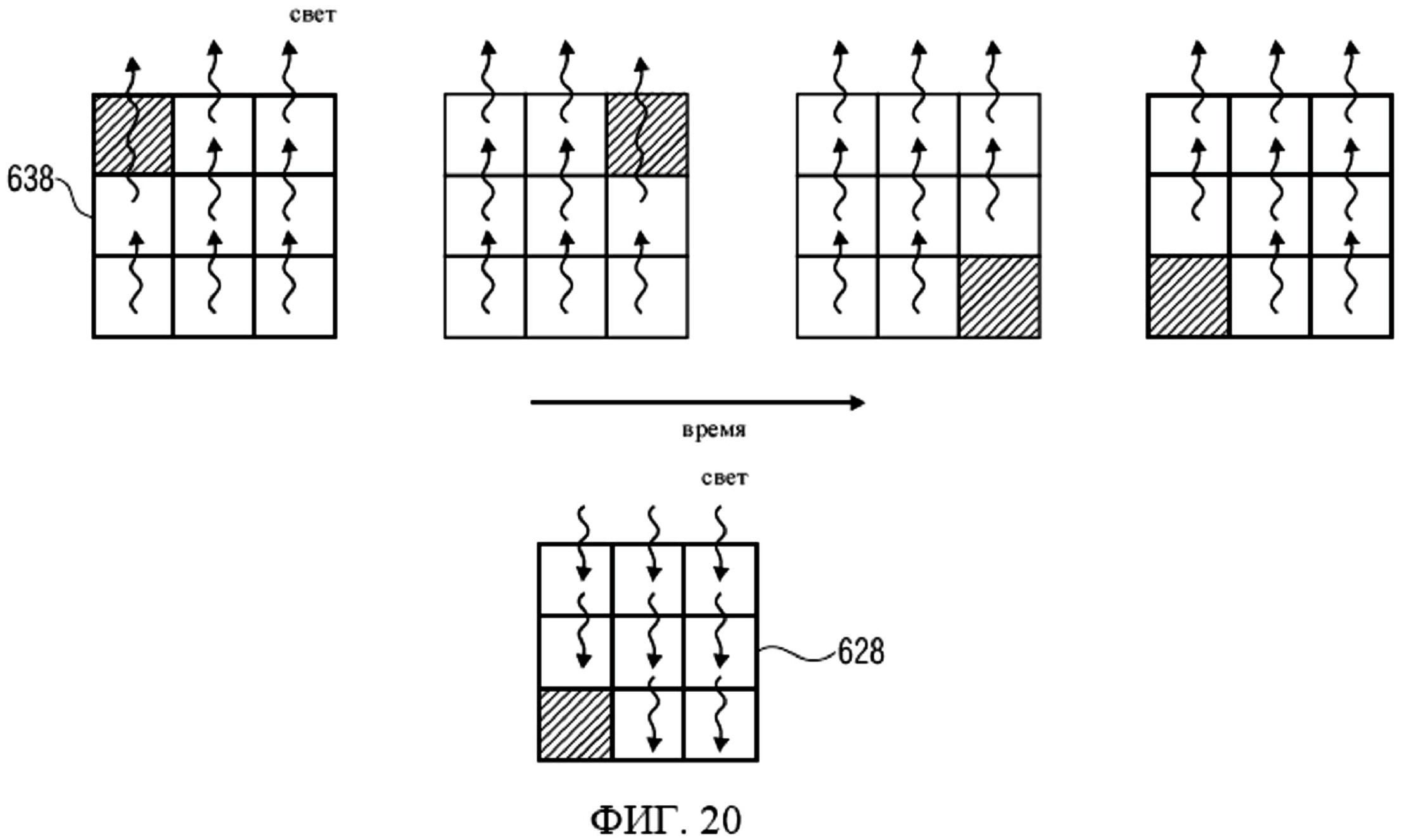
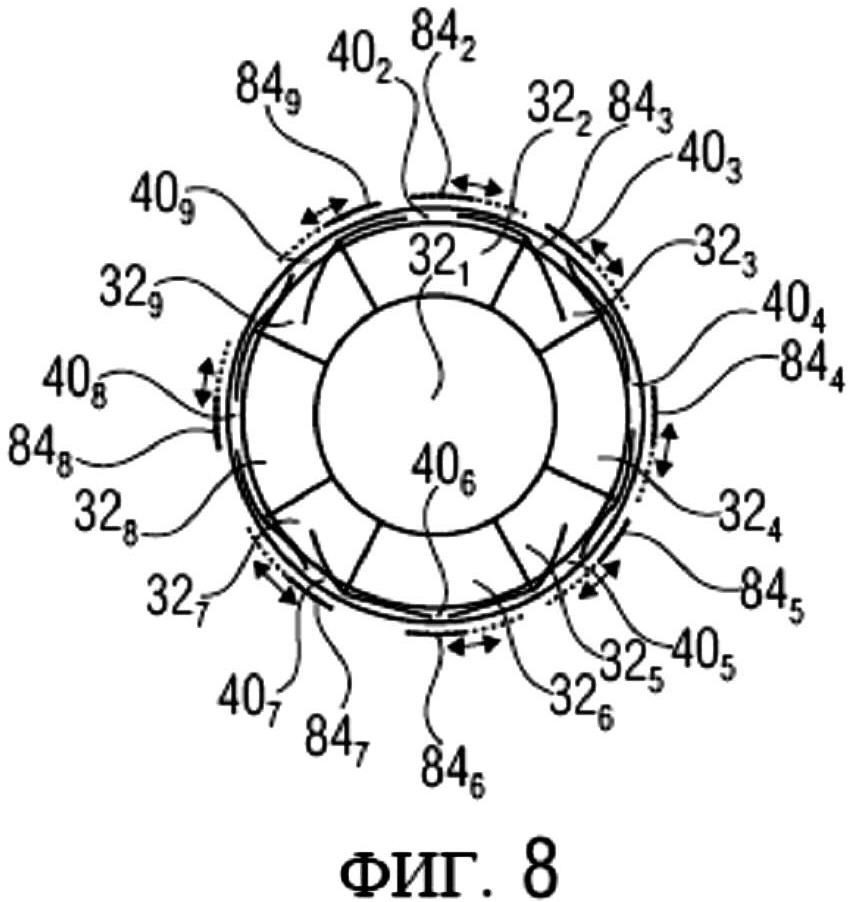
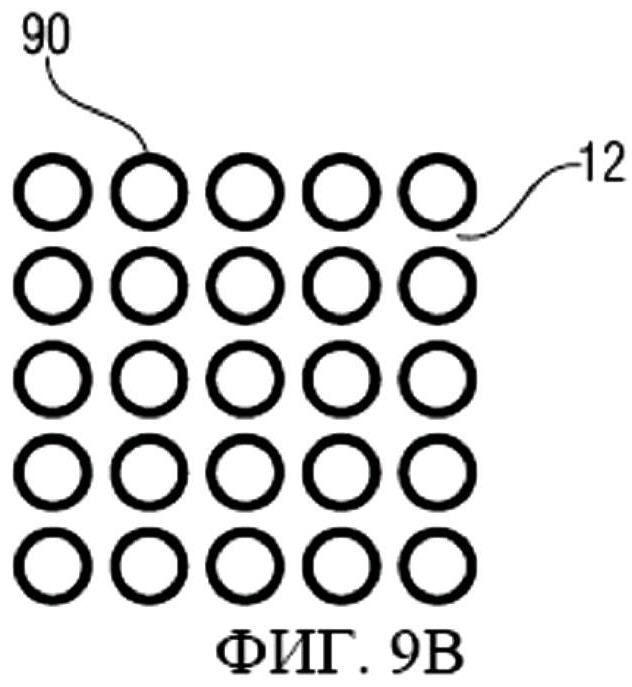
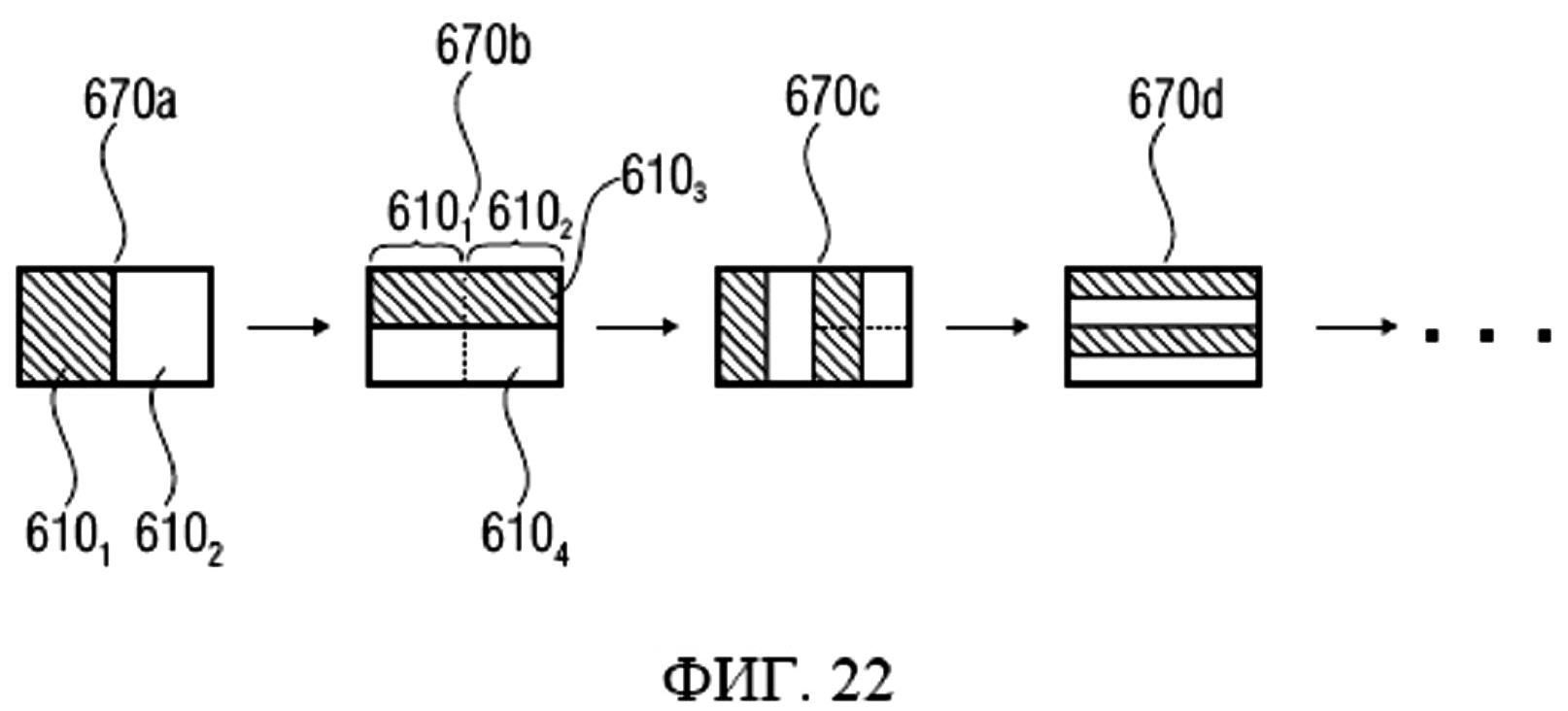
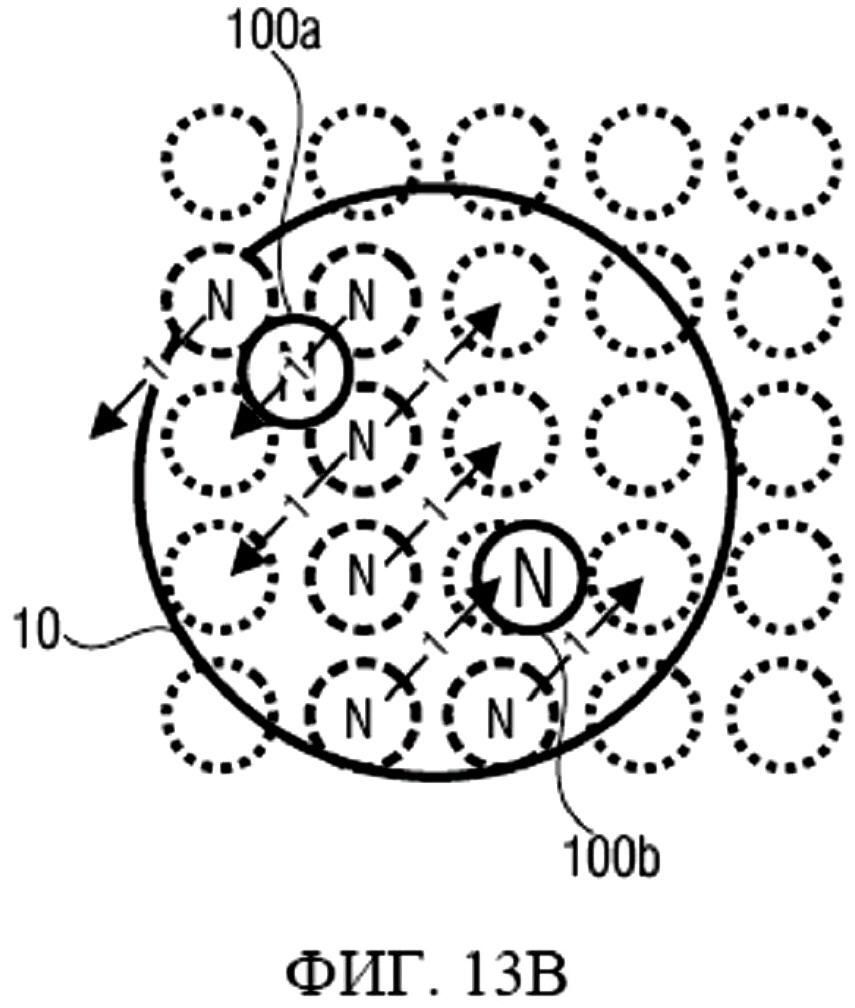
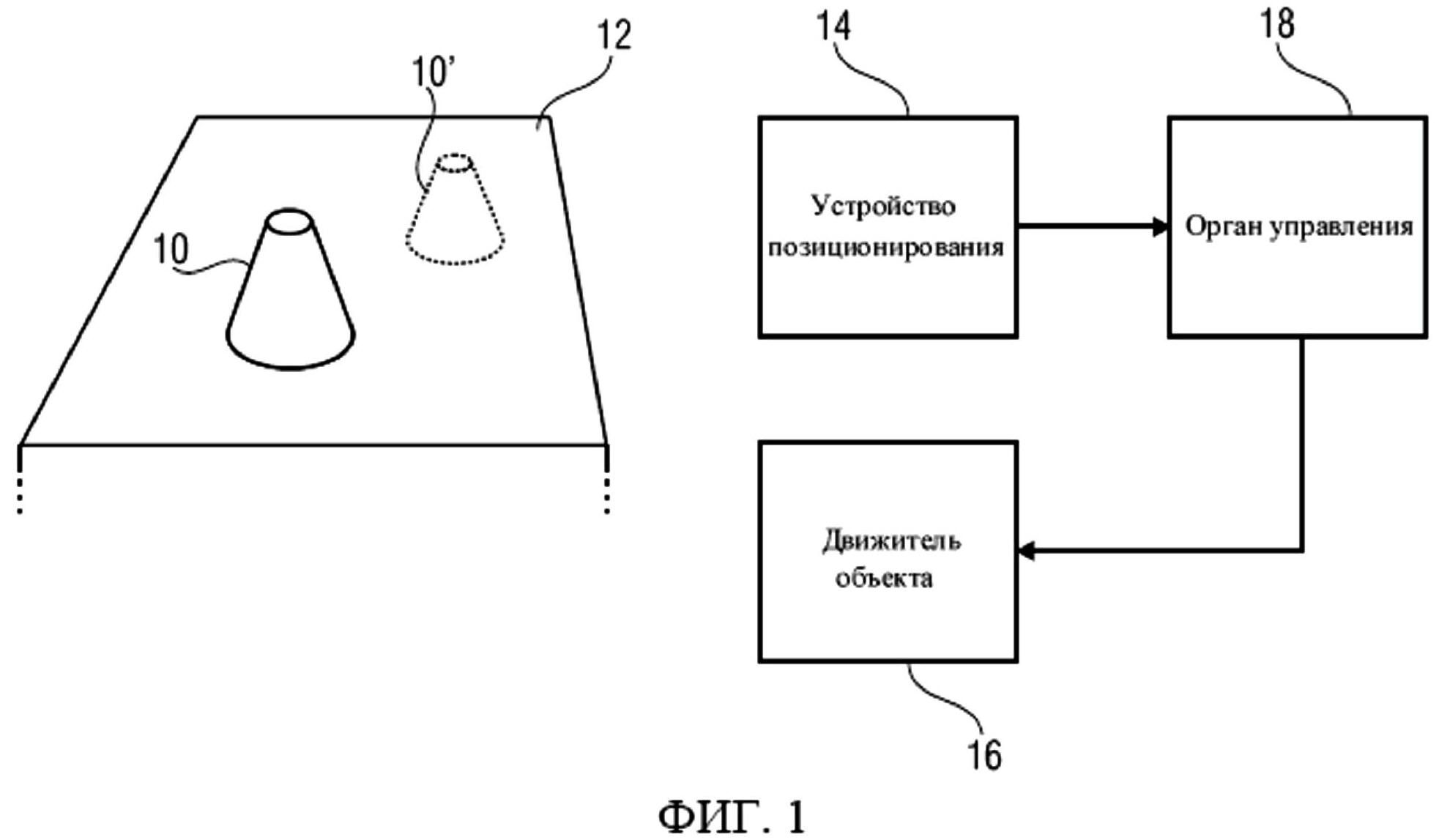
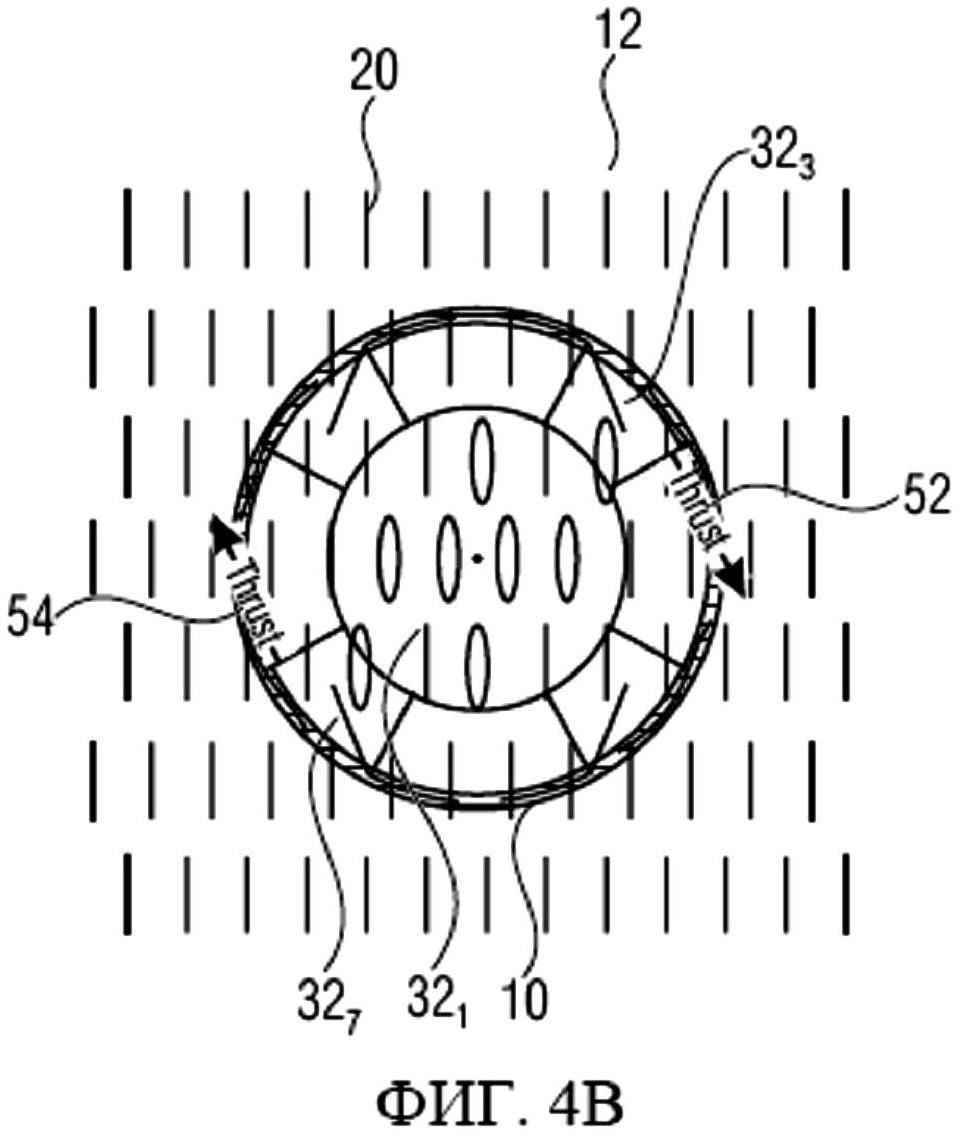
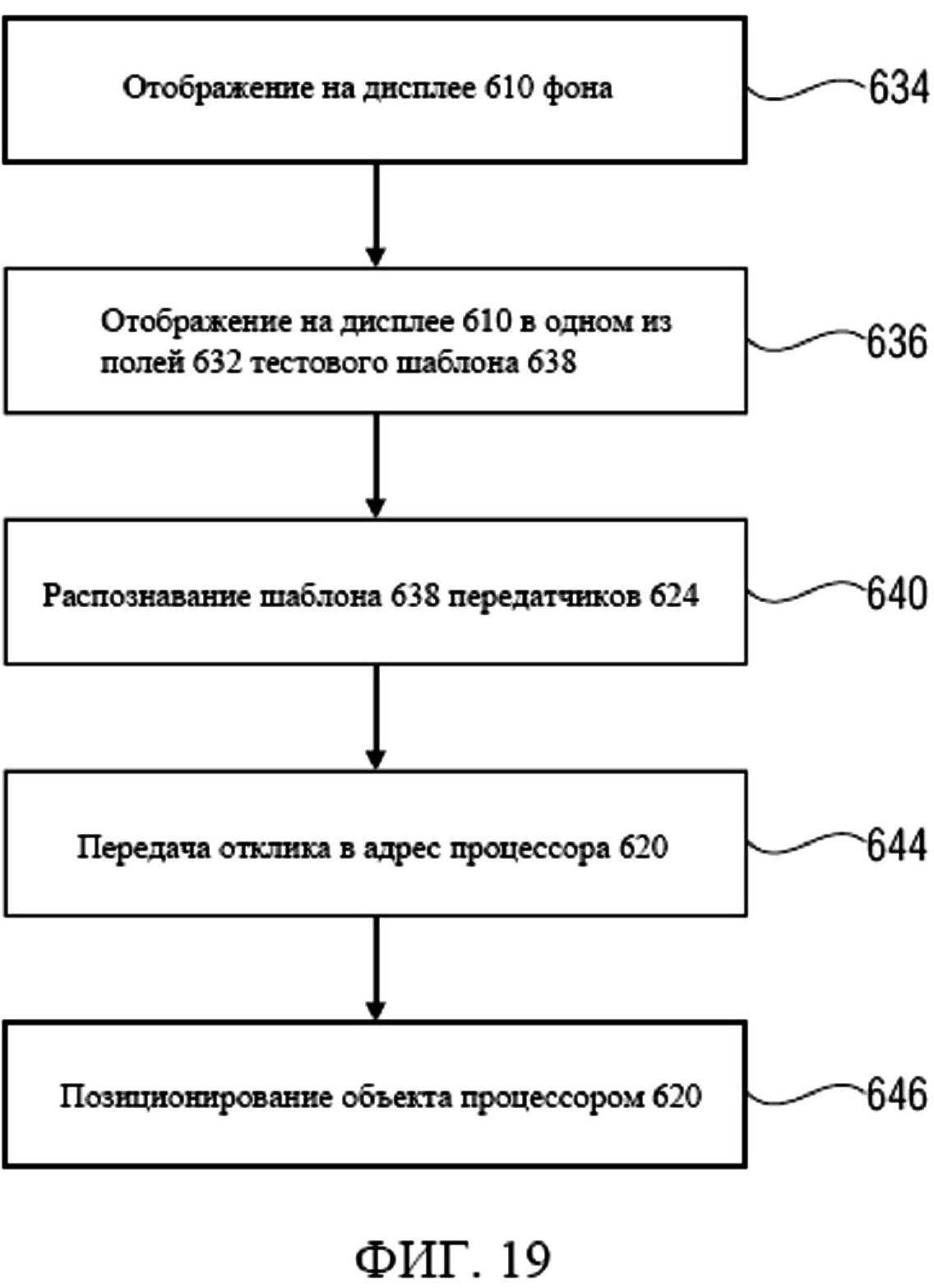
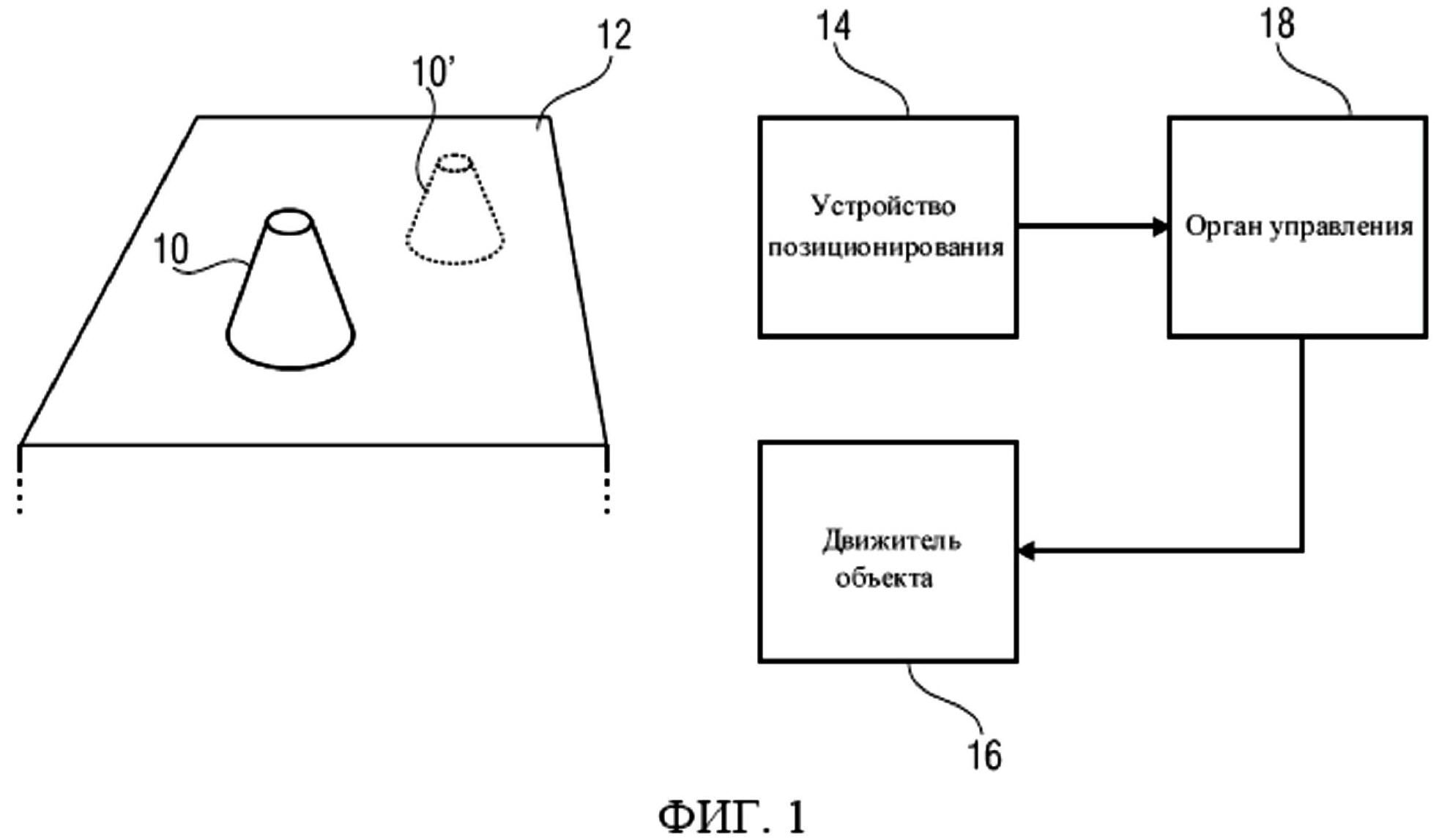
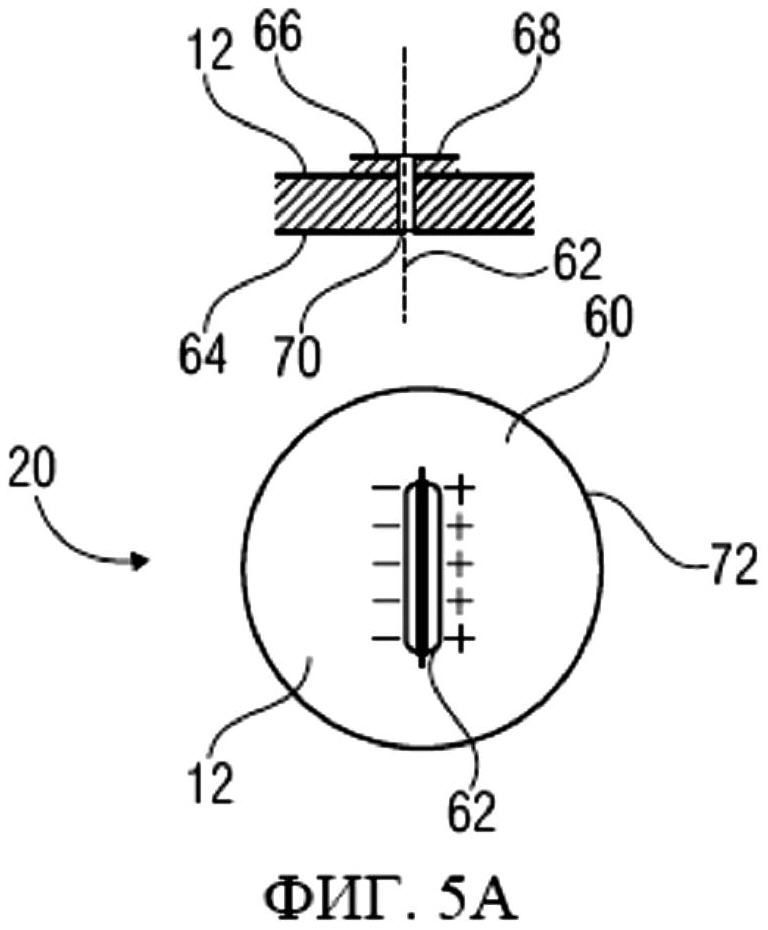
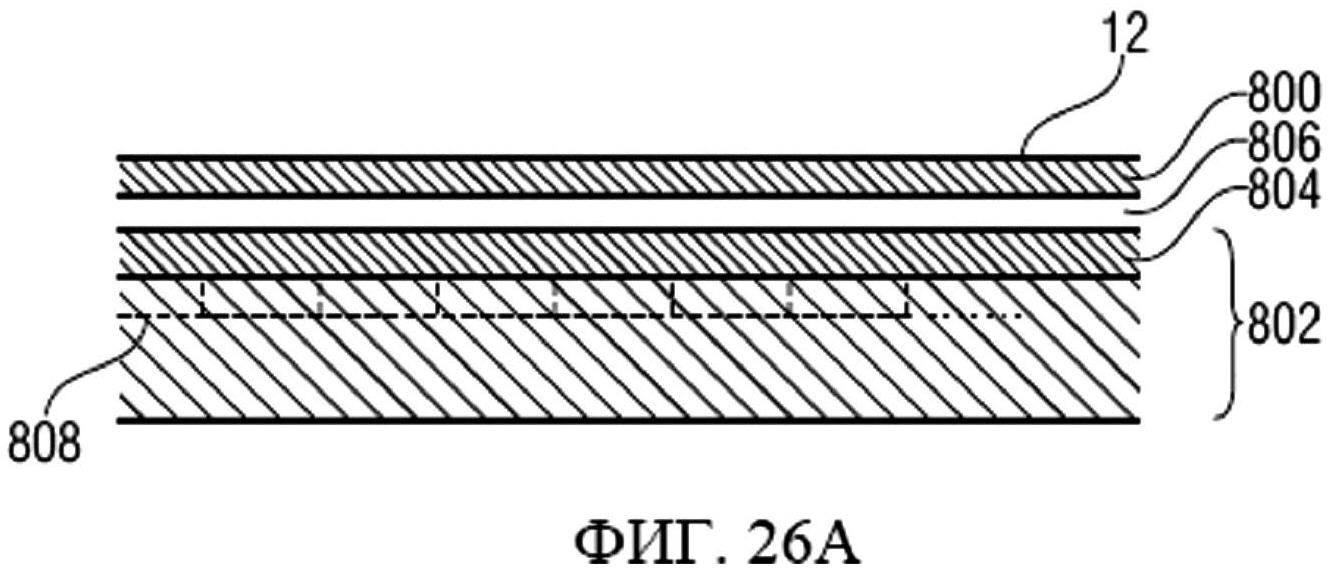
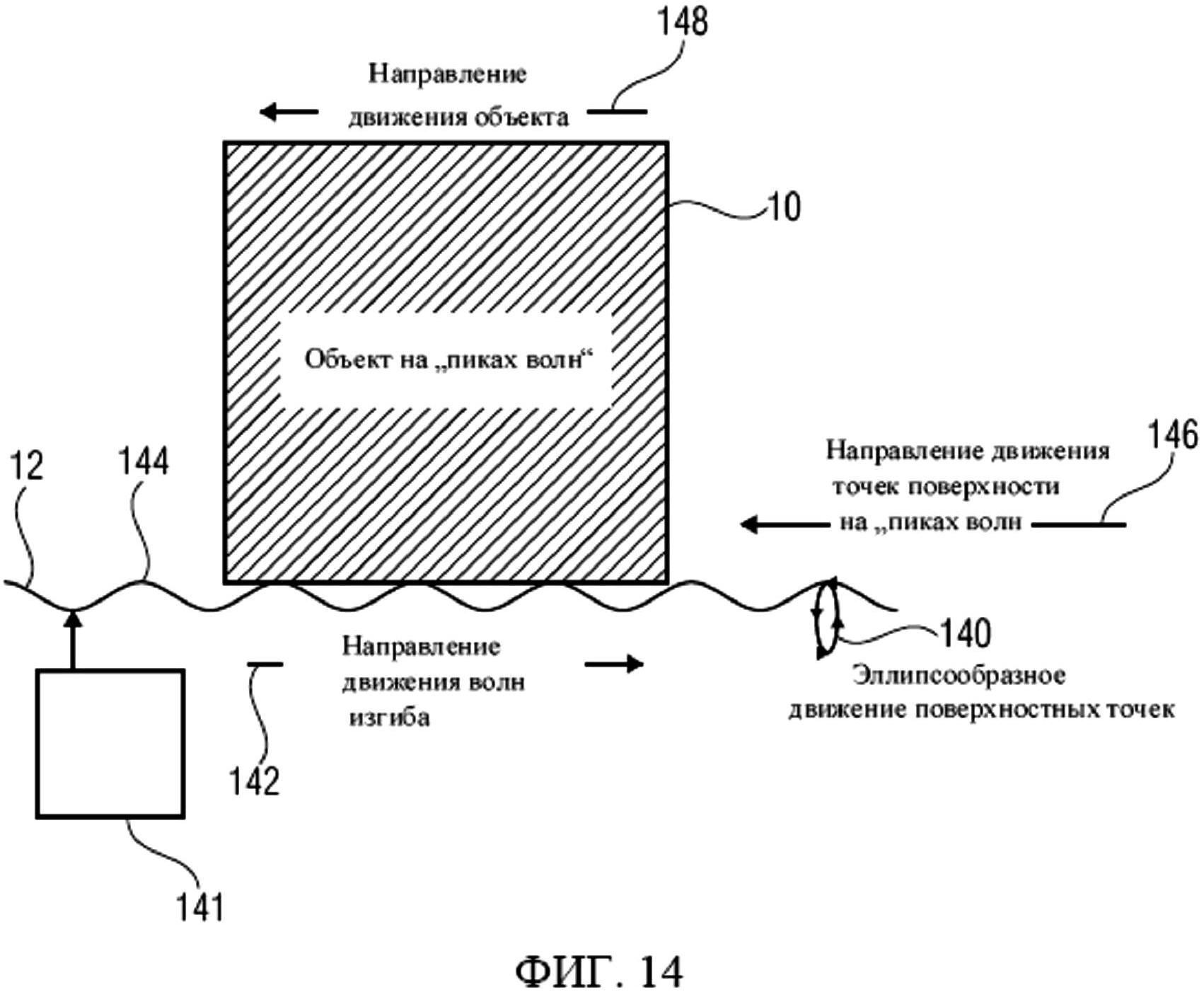
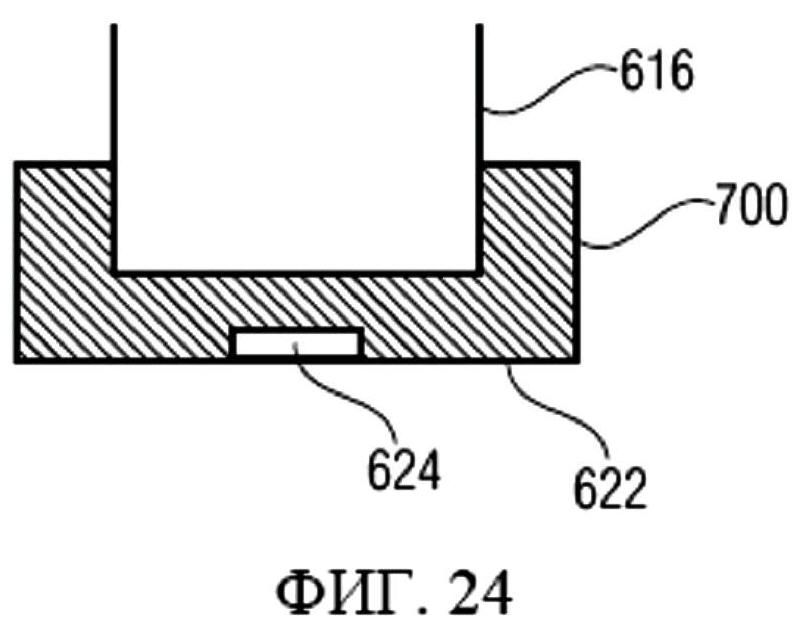
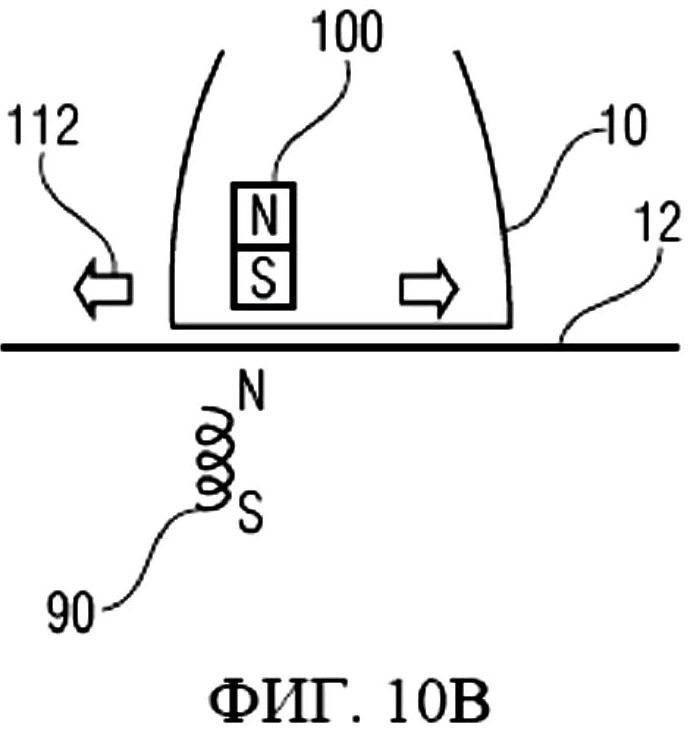
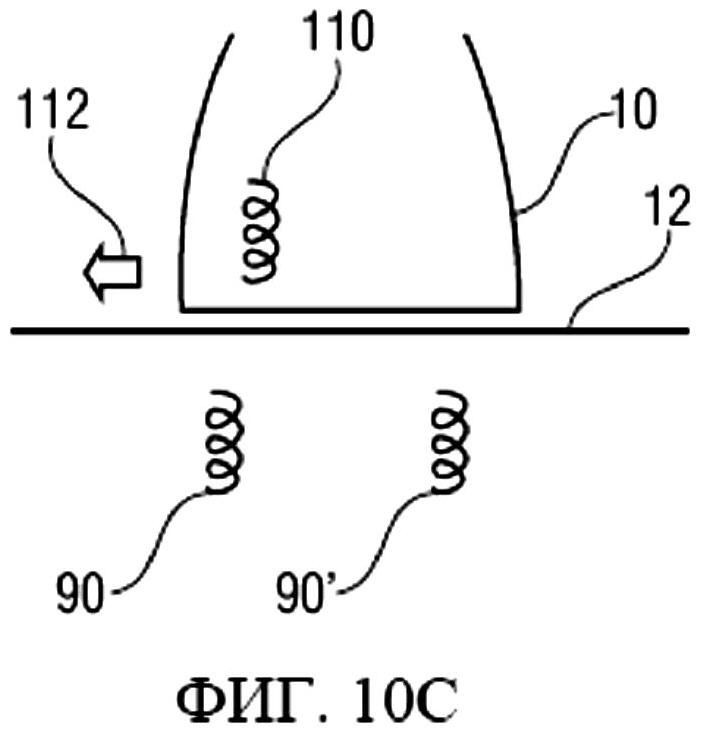
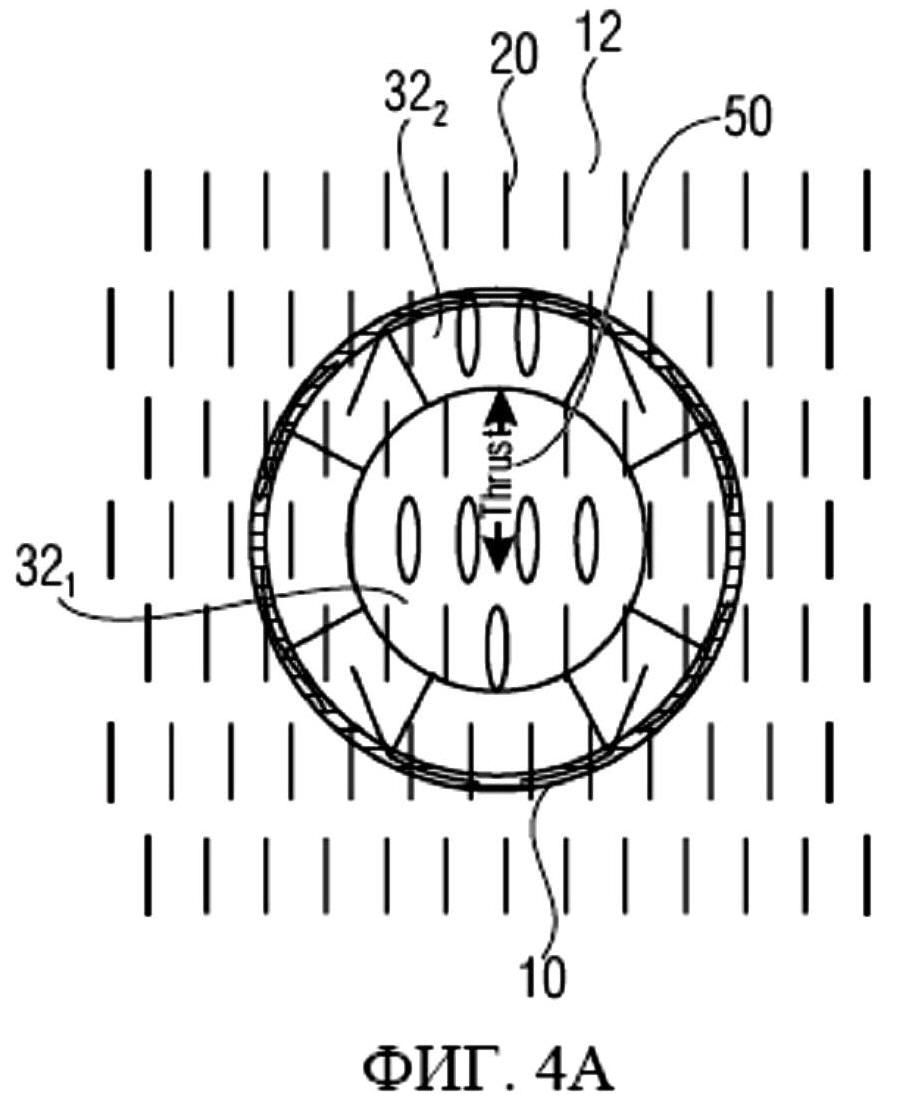
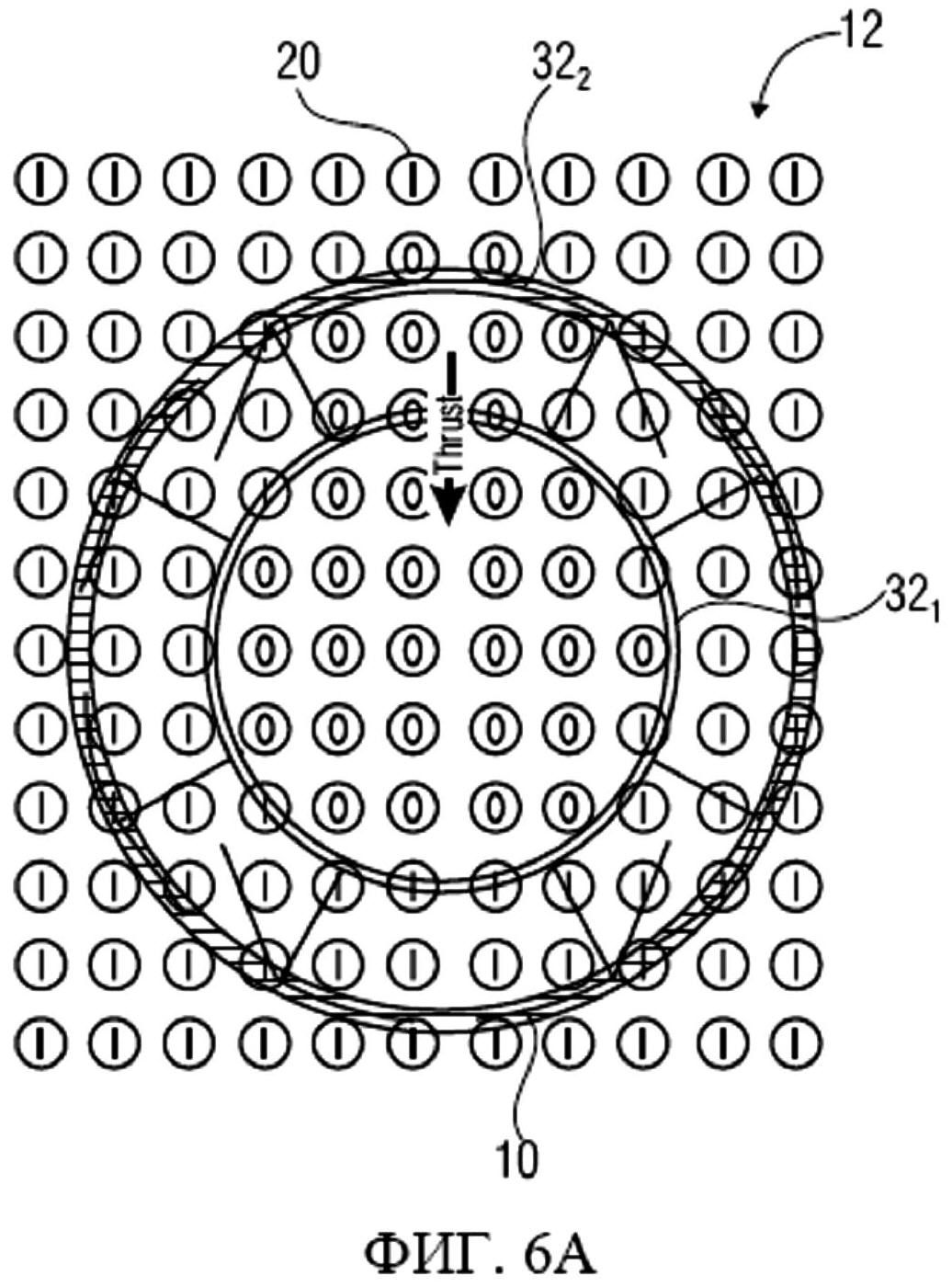
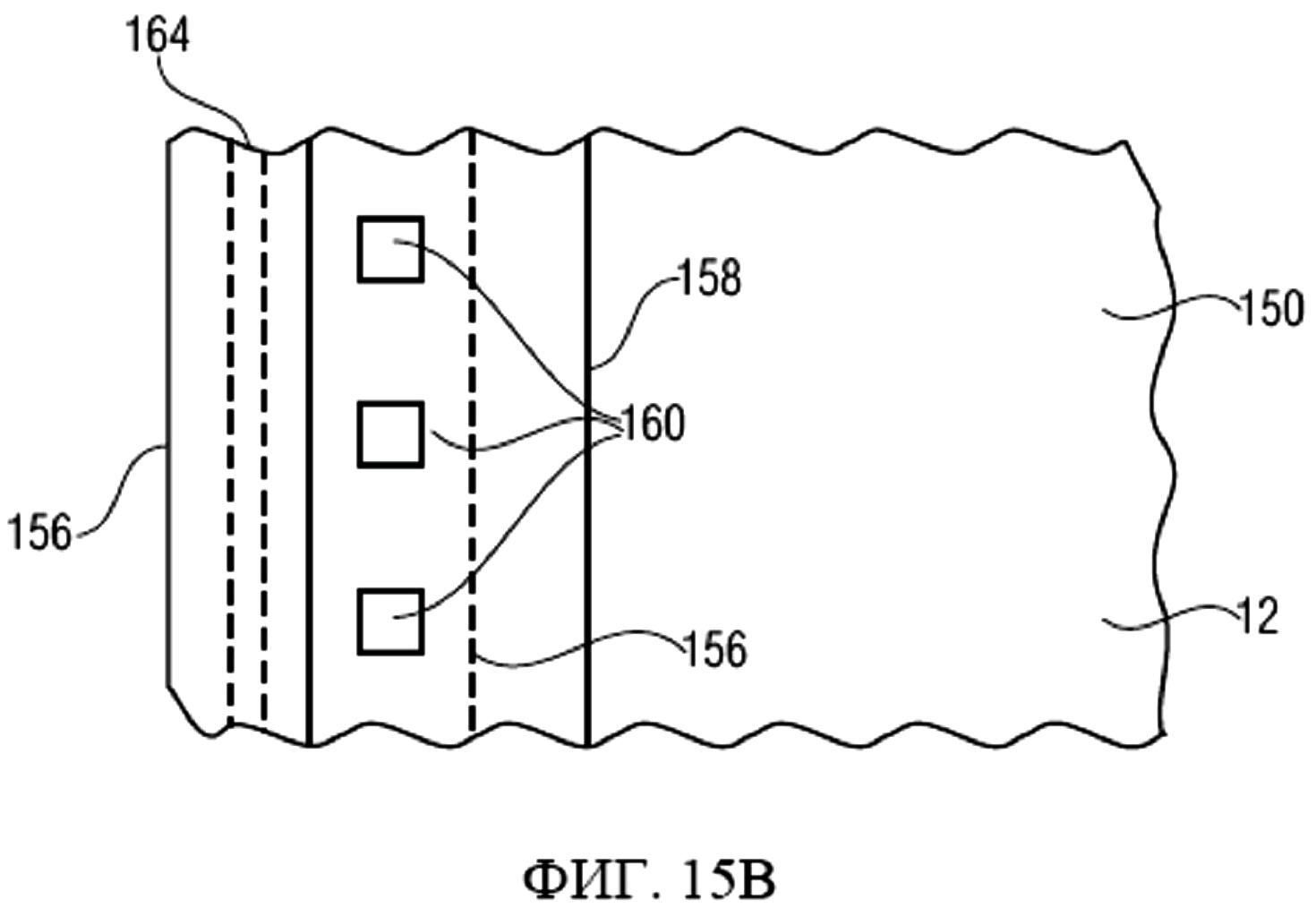
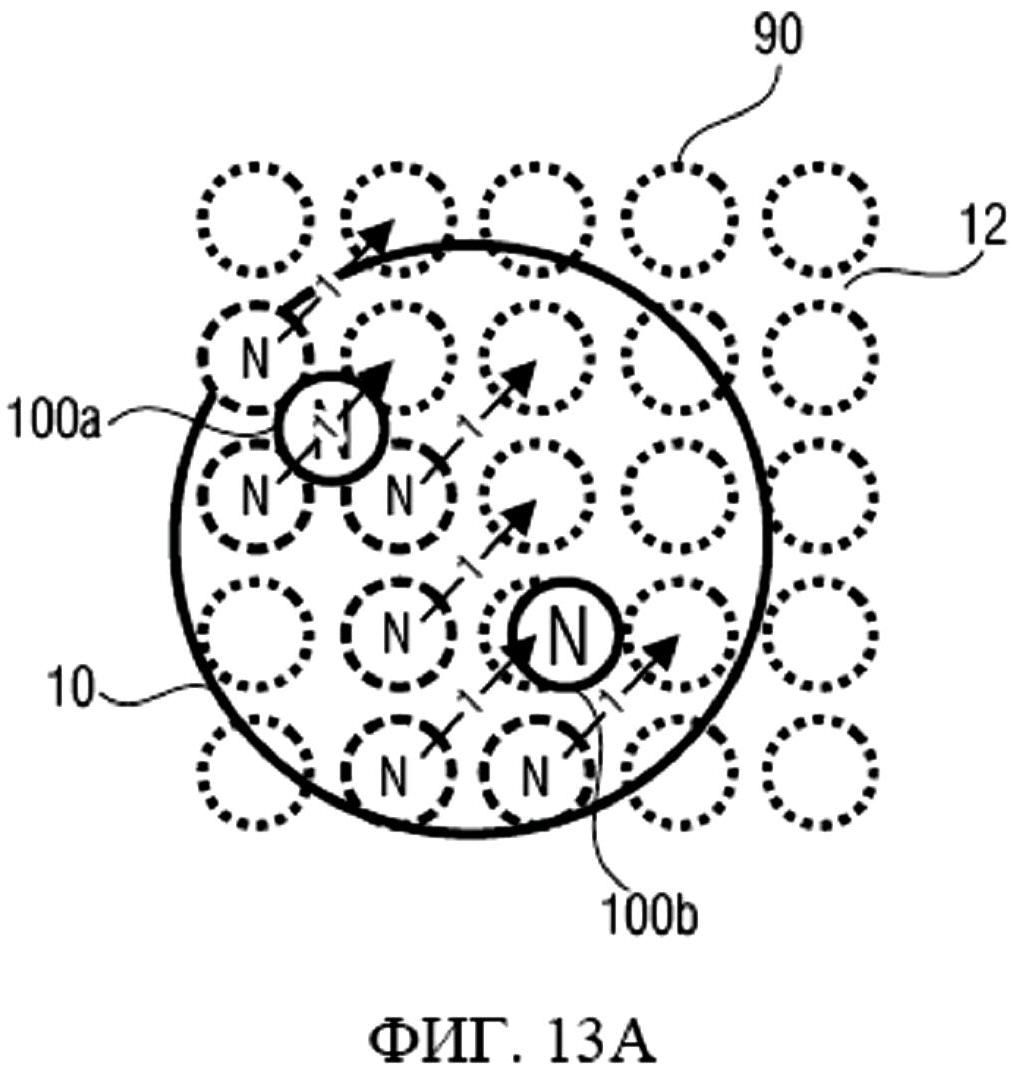
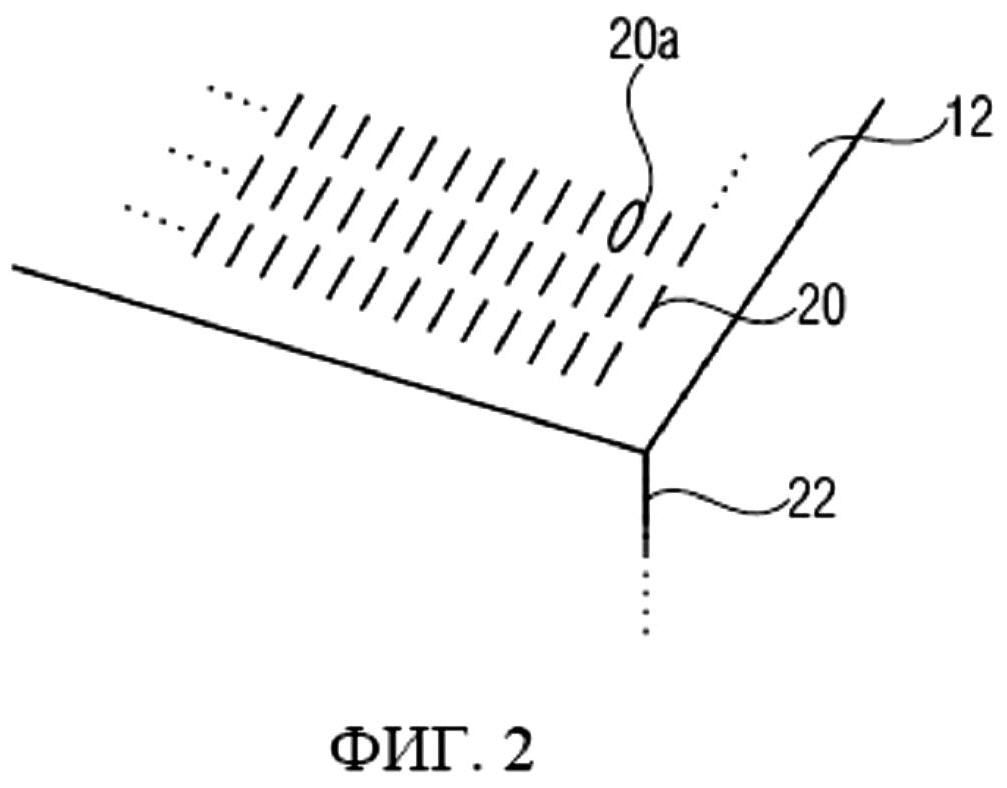
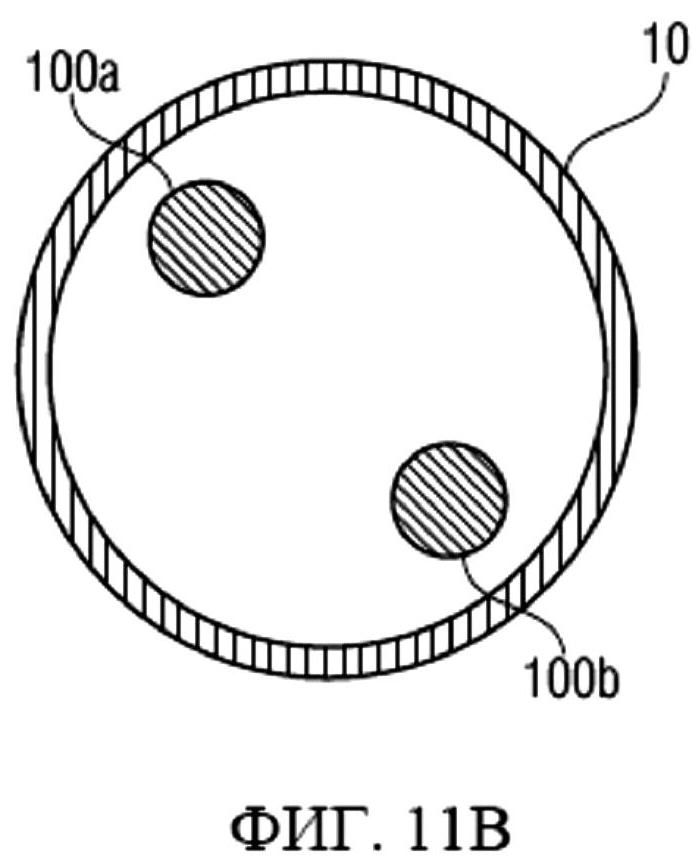
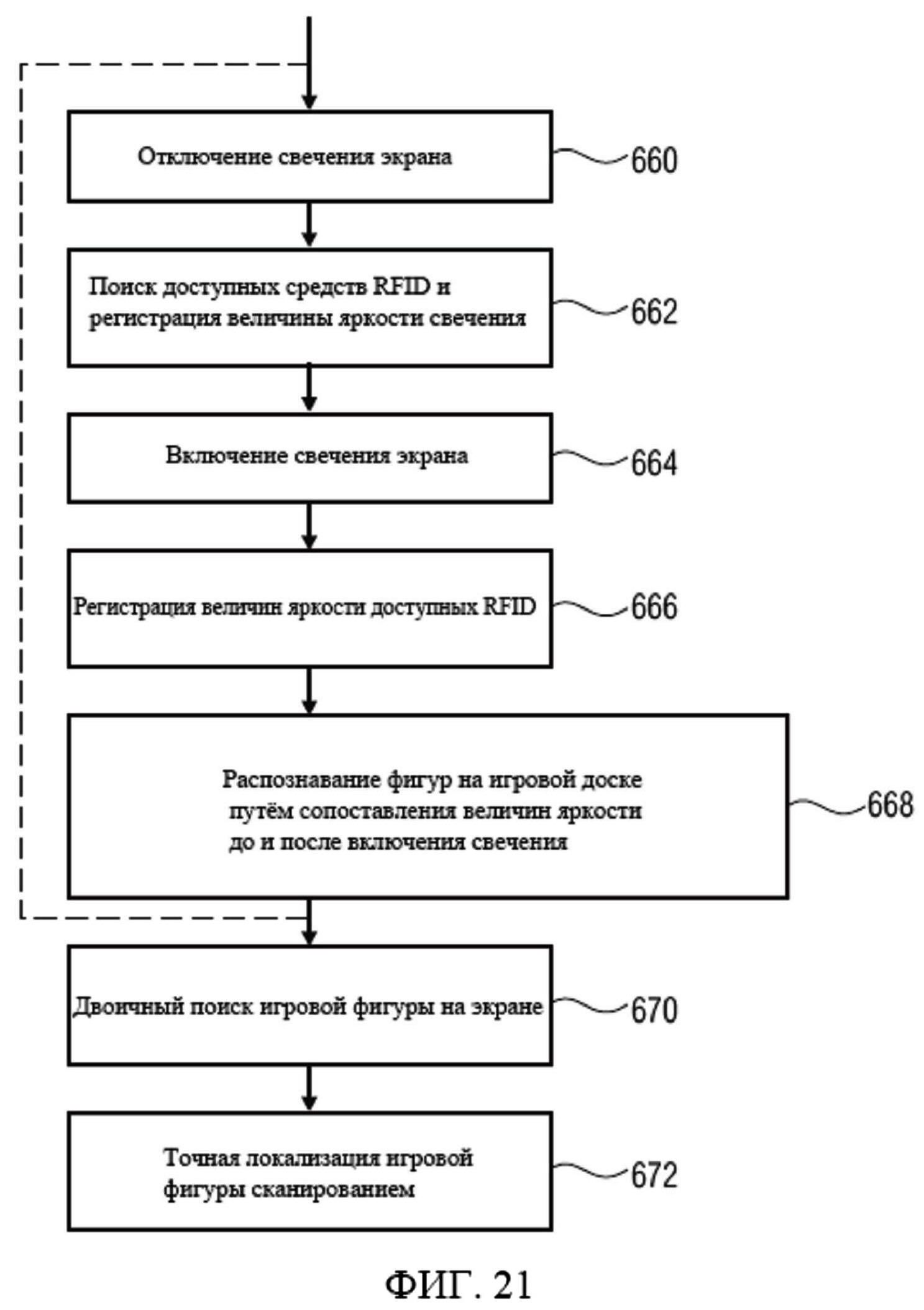
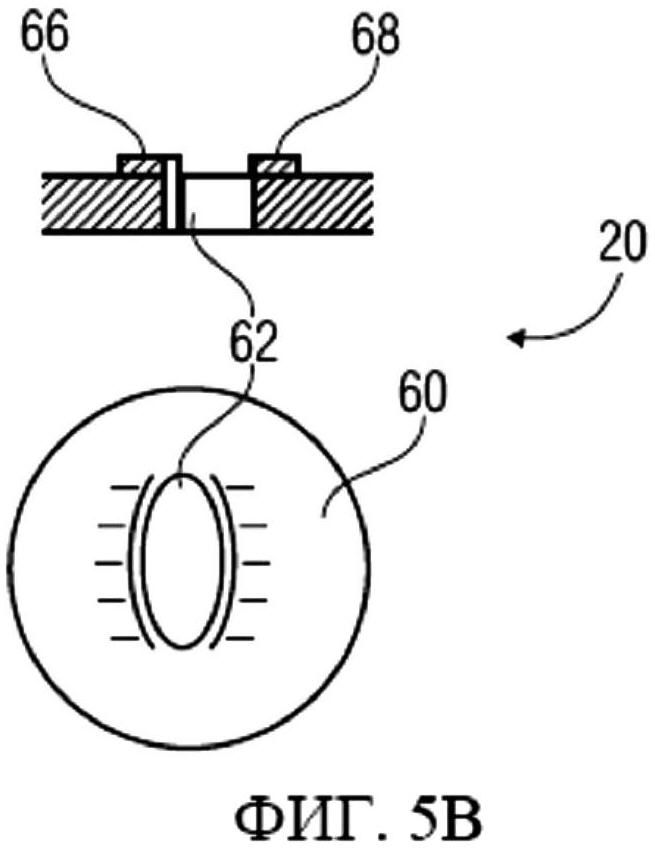
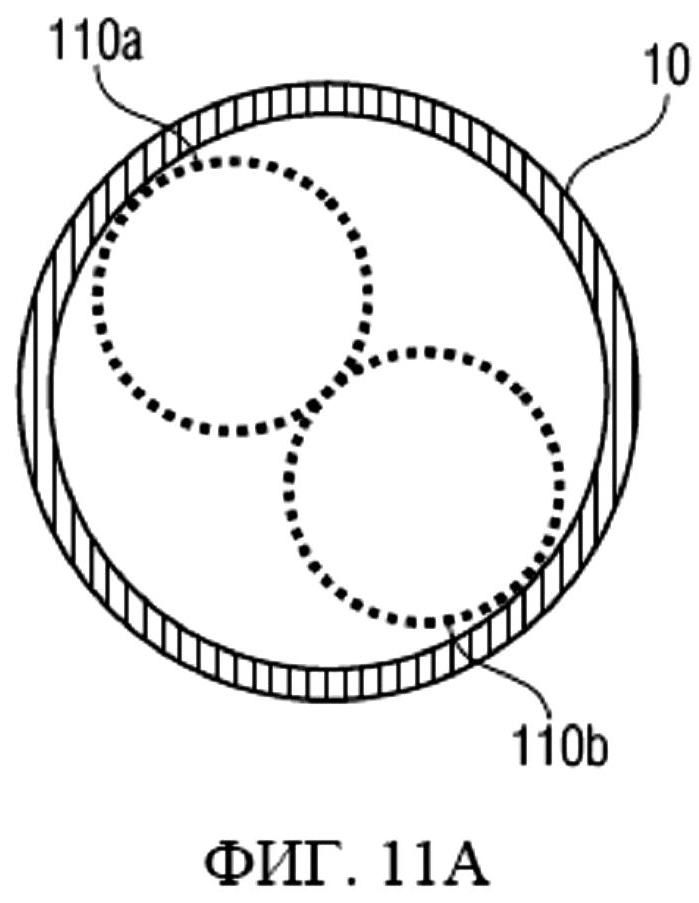
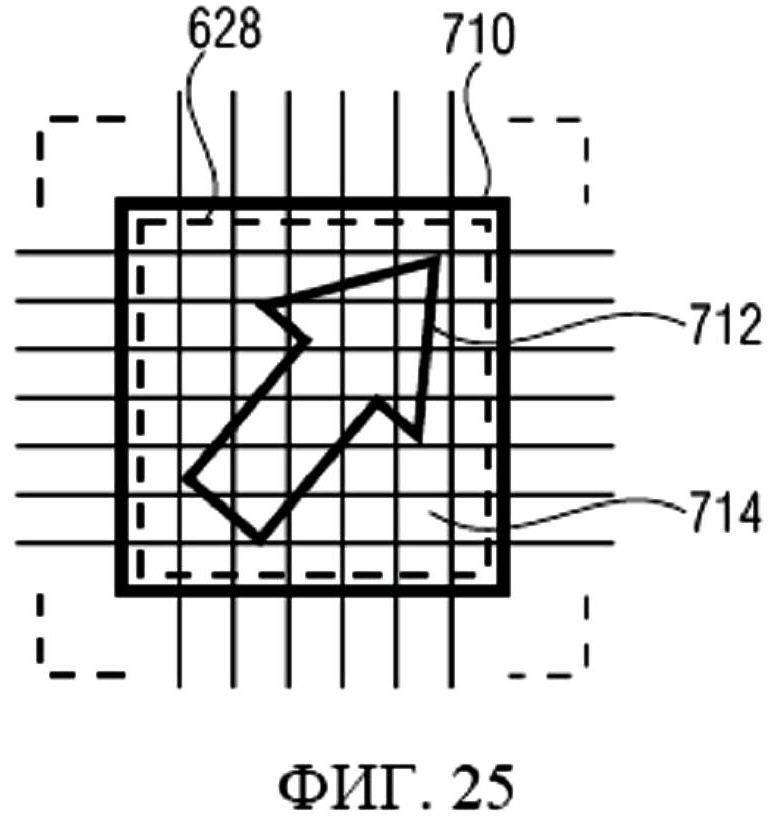
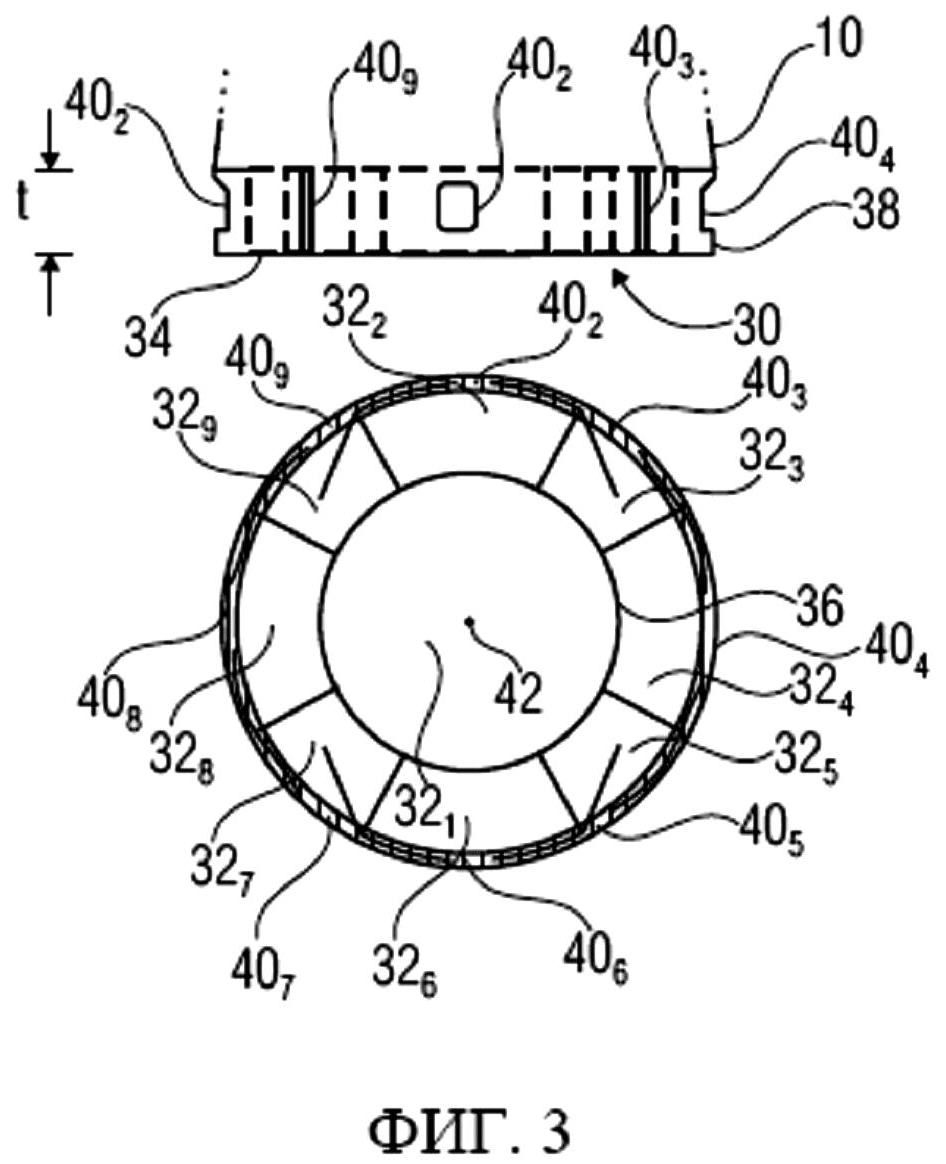
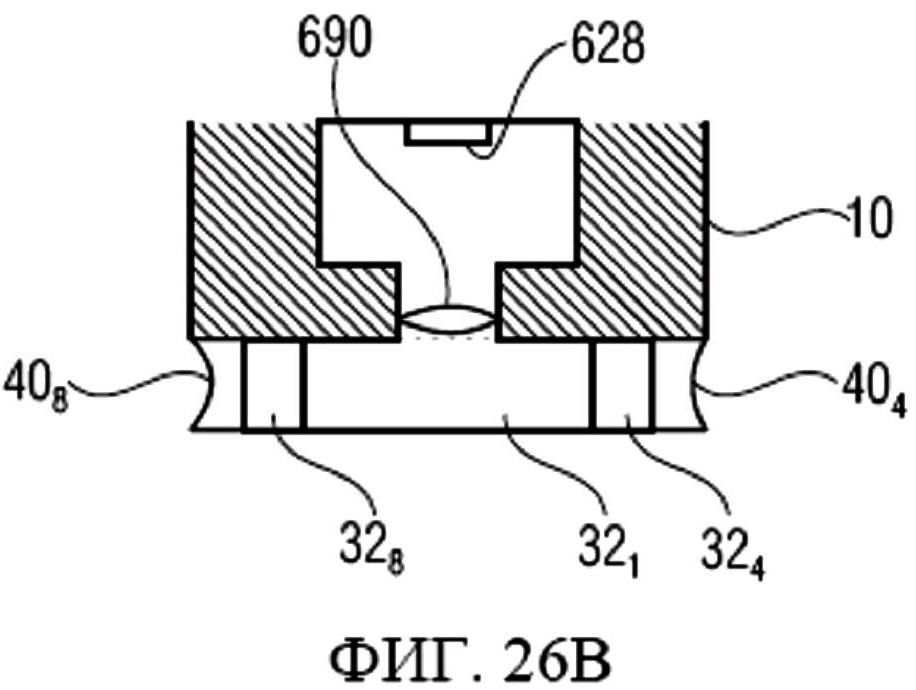
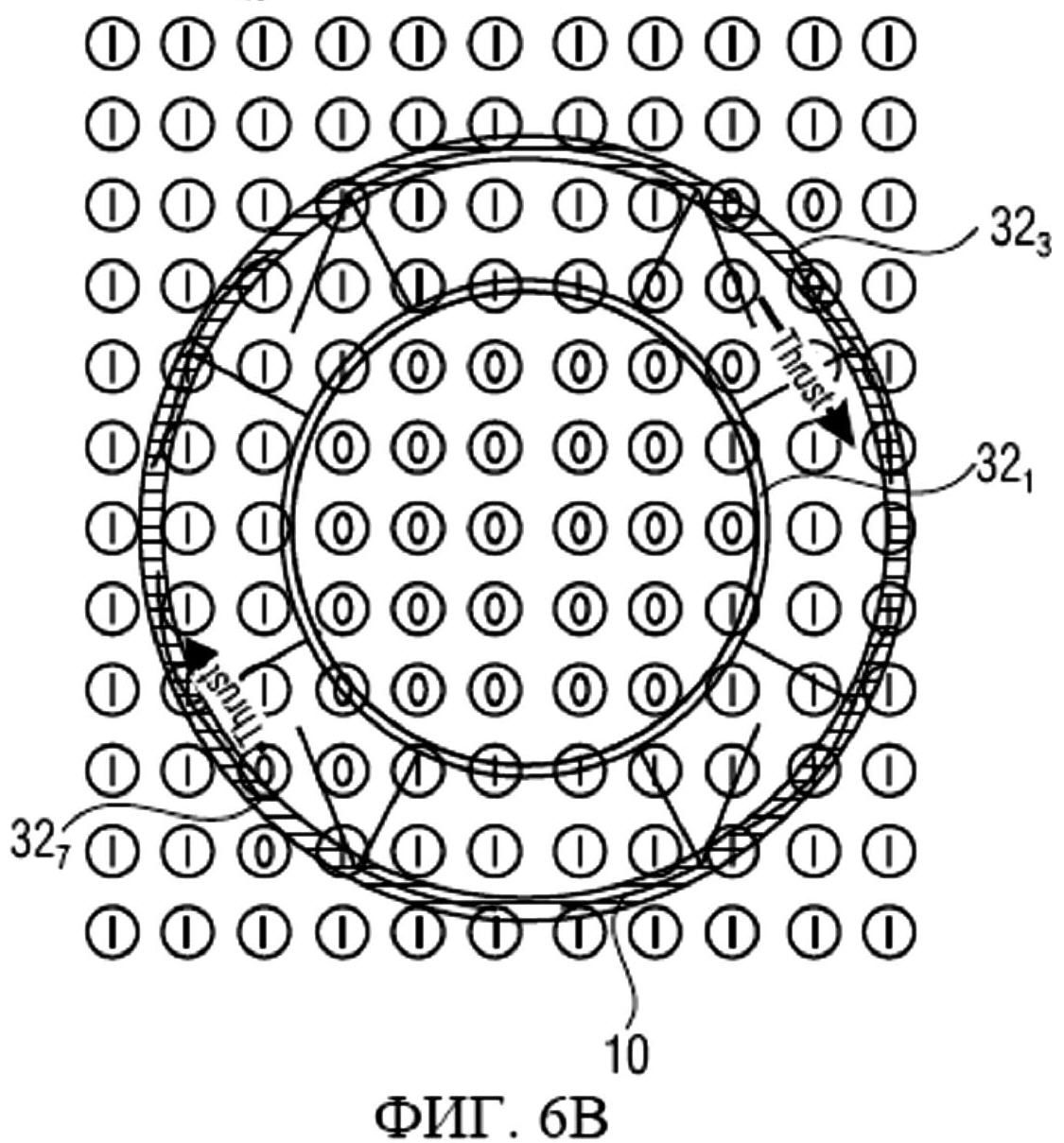
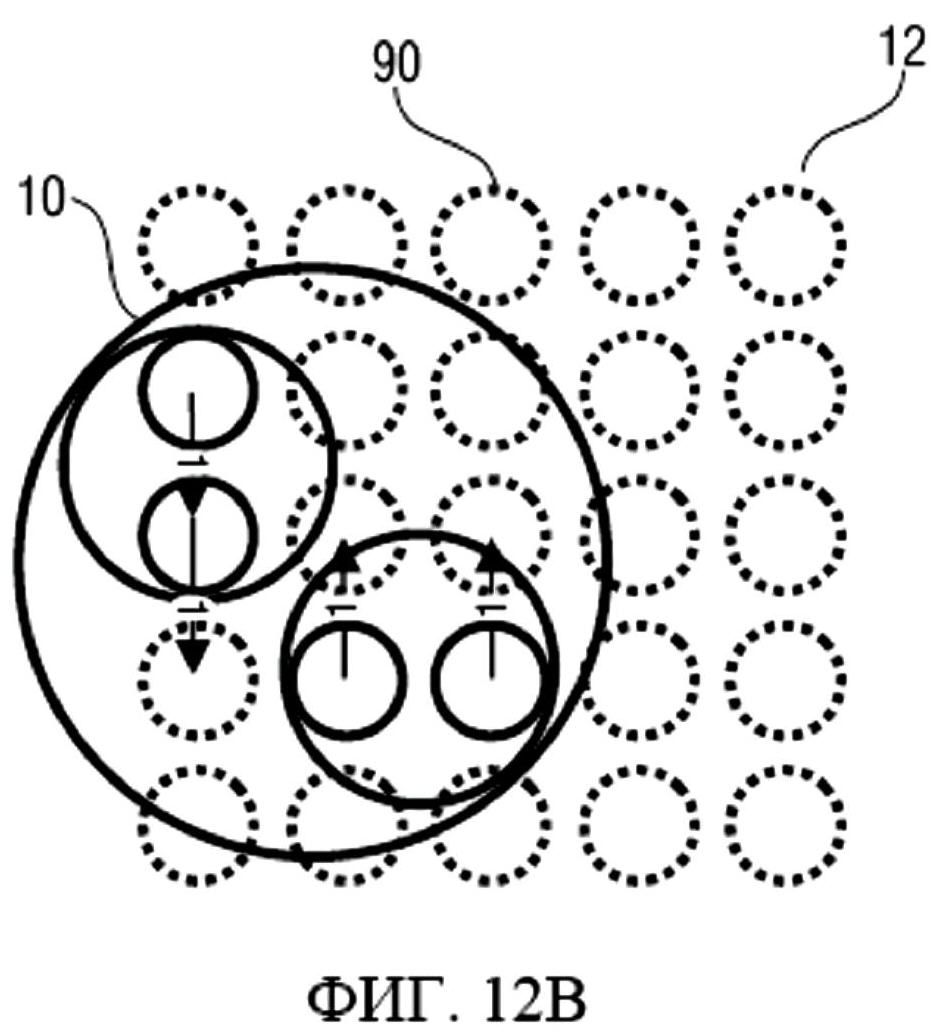
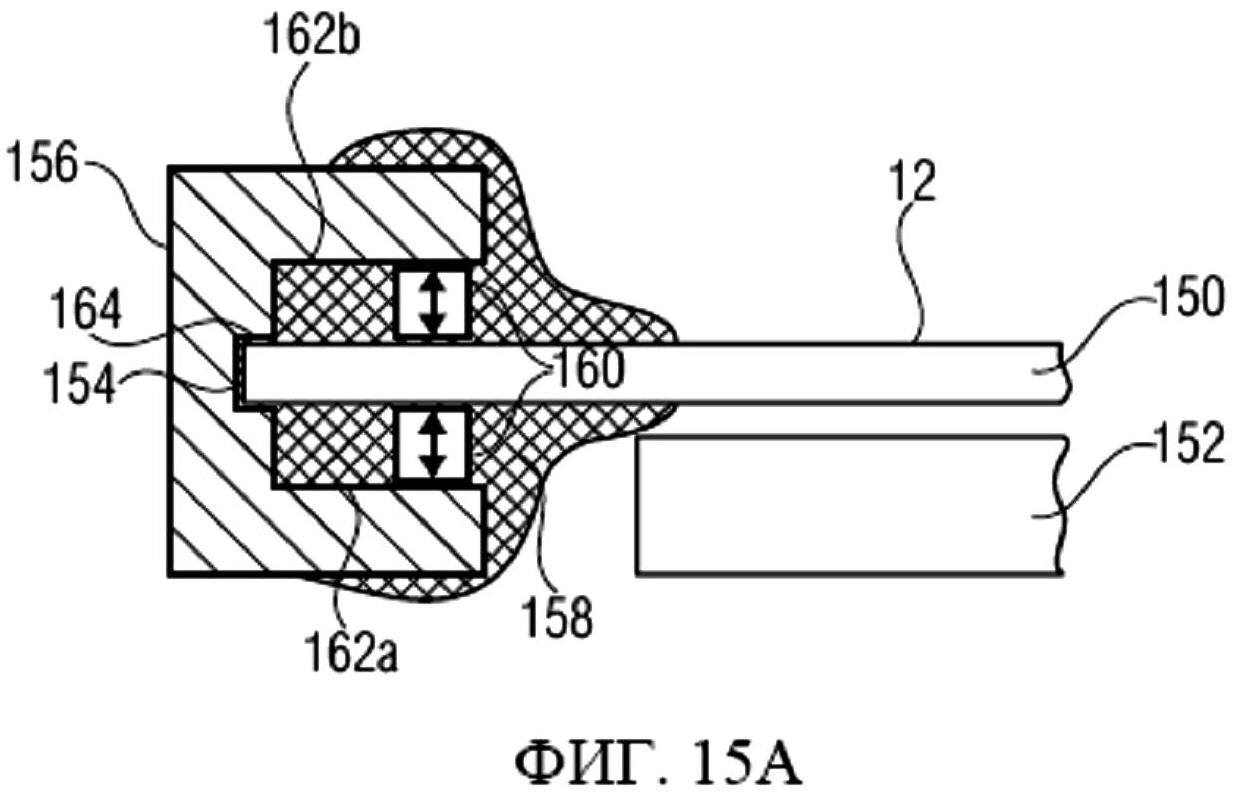
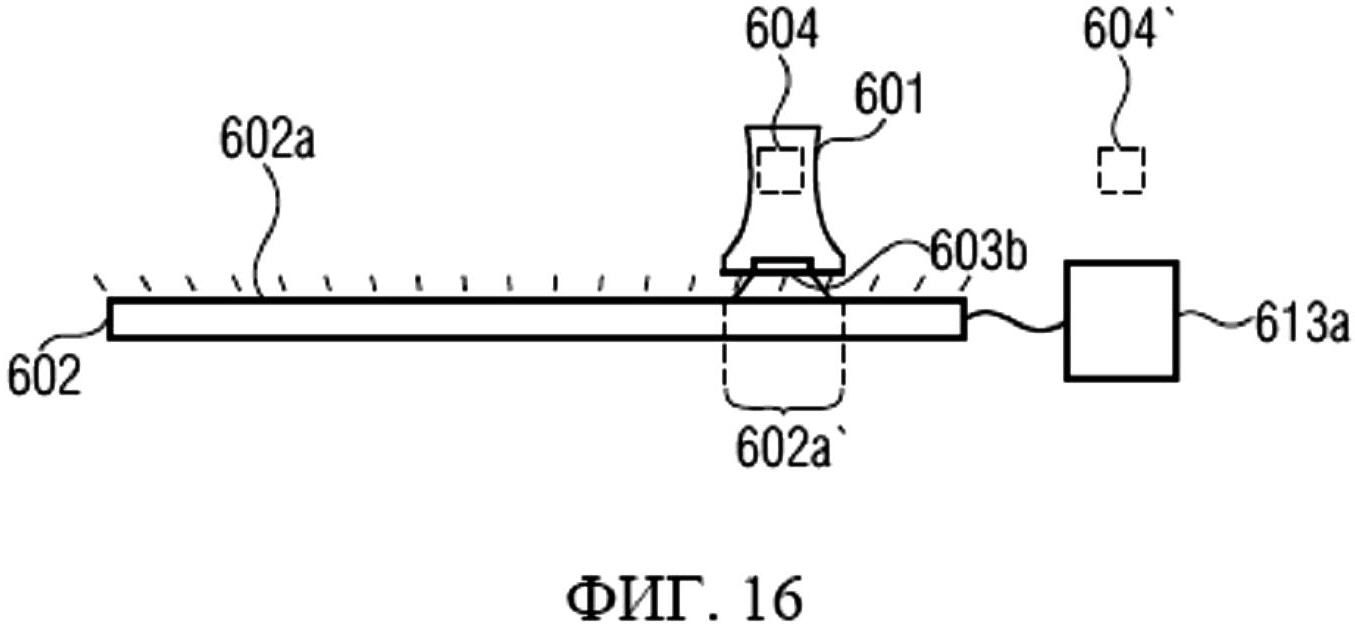
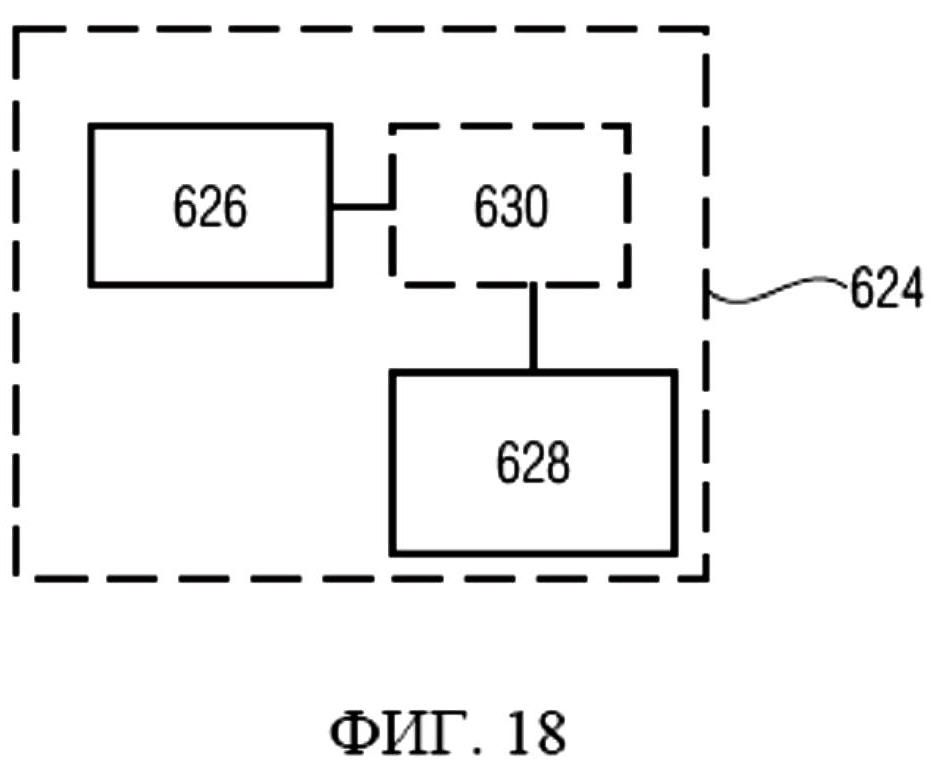
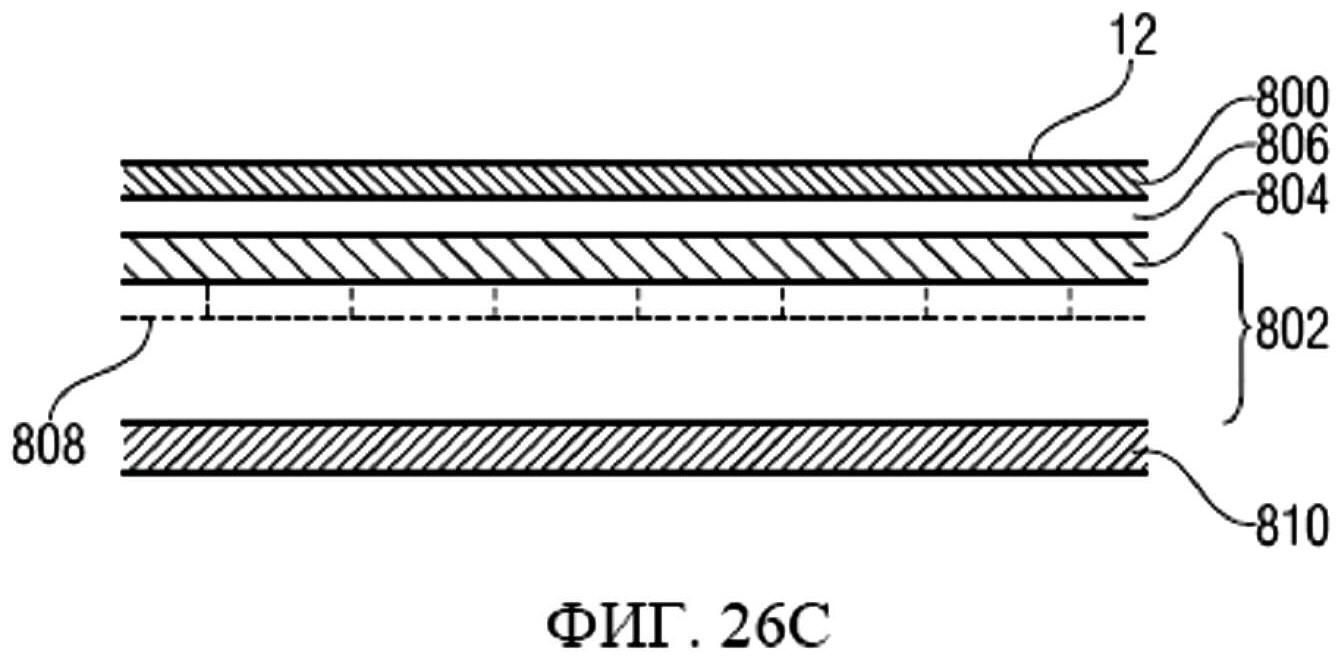
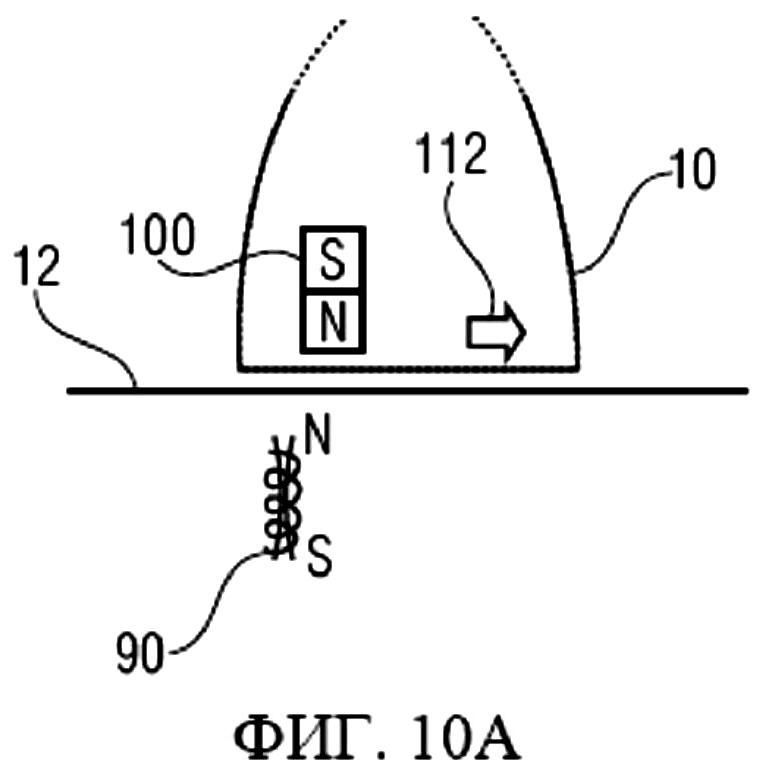
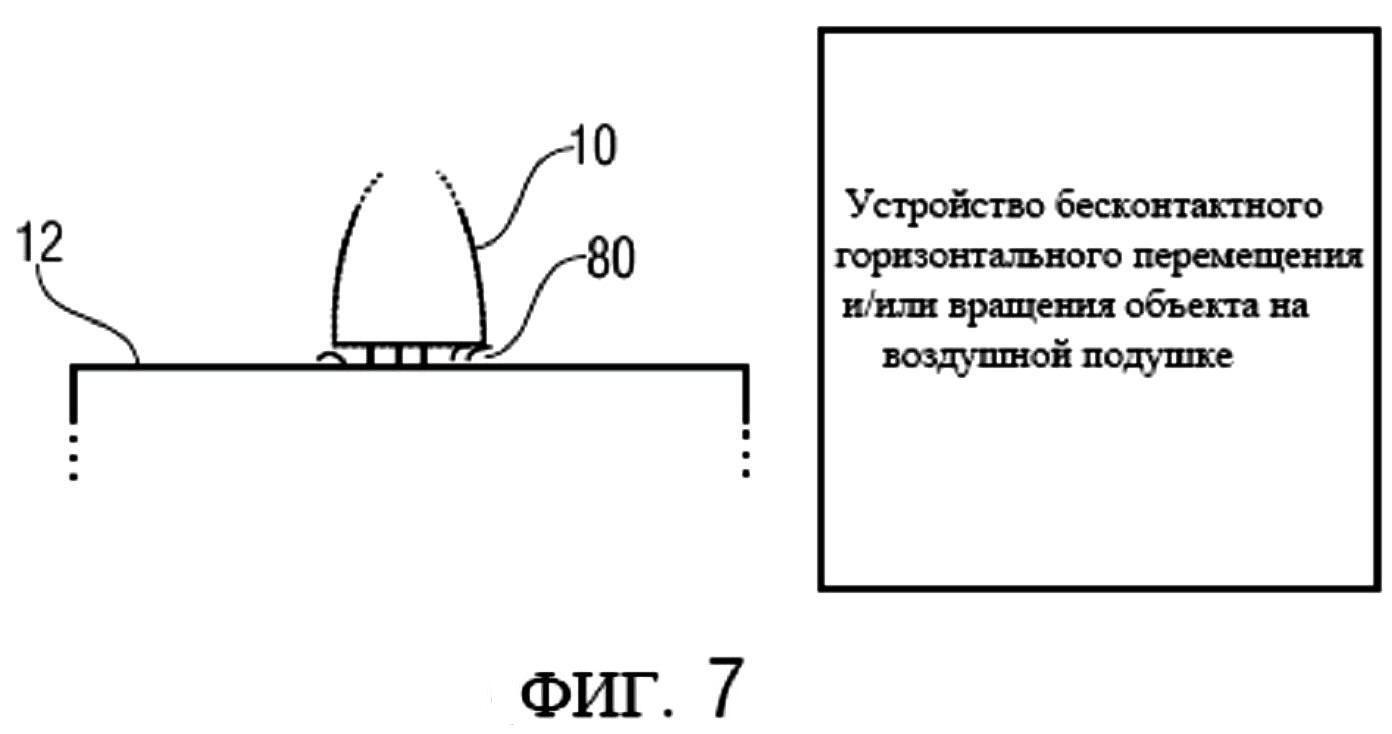
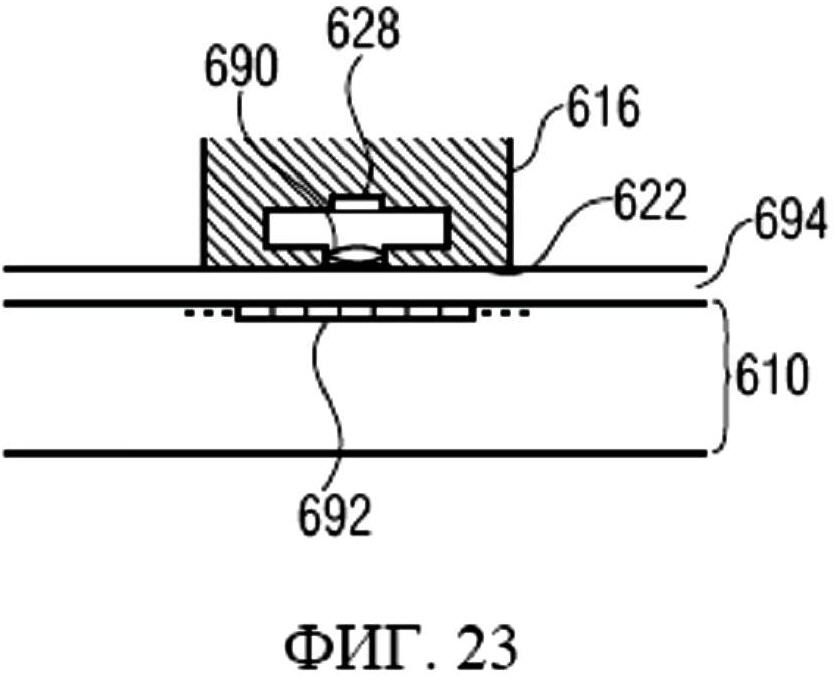
Схема аудиокодирования/декодирования с переключением байпас
Низкоскоростная аудиокодирующая/декодирующая схема с общей предварительной обработкой
Устройство и способ декодирования кодированного звукового сигнала
Схема кодирования/декодирования аудио сигналов с низким битрейтом с применением каскадных переключений
Устройство и способ для вычисления числа огибающих спектра
Кодирующее устройство и способ генерирования потока данных
Устройство и способ определения множества локальных частотных центров тяжести в спектре аудиосигнала
Устройство и способ генерирования выходных данных расширения полосы пропускания
Устройство и способ генерирования сигнала с расширенной полосой пропускания
Шумовой фон, устройство обработки шумового фона, метод обеспечения параметров шумового фона, метод обеспечения спектрального представления шумового фона аудиосигнала, компьютерная программа и кодированный аудиосигнал
Устройство и способ для извлечения сигнала окружающей среды в устройстве и способ получения весовых коэффициентов для извлечения сигнала окружающей среды
Аудиокодирование с использованием повышающего микширования
Схема аудиокодирования/декодирования с переключением байпас
Низкоскоростная аудиокодирующая/декодирующая схема с общей предварительной обработкой
Устройство и способ декодирования кодированного звукового сигнала
Схема кодирования/декодирования аудио сигналов с низким битрейтом с применением каскадных переключений
Устройство и способ для хранения и чтения файла, имеющего хранилище медиа данных и хранилище метаданных
Звуковое кодирующее устройство и звуковое декодирующее устройство
Устройство и способ для вычисления числа огибающих спектра
Микширование входящих информационных потоков и генерация выходящего информационного потока

