Результат интеллектуальной деятельности: КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области авиационного приборостроения.
Курс, крен, тангаж, скорость и координаты местоположения относятся к основным навигационно-пилотажным параметрам, измеряемым на борту летательных аппаратов (ЛА). На борту современных ЛА для измерения курса, крена, тангажа, скорости и координат местоположения широкое применение нашли инерциальные навигационные системы (ИНС).
Теоретические основы функционирования ИНС и описание некоторых из них приведены во многих работах отечественных и зарубежных авторов. В частности, в работах, которые приведены ниже:
1. Бабич О.А. "Обработка информации в навигационных комплексах", М.: Машиностроение, 1991;
2. Бромберг П.В. "Теория инерциальных систем навигации", М.: Наука, 1979;
3. Воробьев Л.М. "Воздушная навигация", М.: Машиностроение, 1984;
4. Петров Б.С."Вопросы теории инерциальных навигационных систем", М.: Наука, 2003;
5. Помыкаев И.И. и др. "Навигационные приборы и системы", М.: Машиностроение, 1983;
6. Репников Ф.В. и др. "Гироскопические системы", М.: Машиностроение, 1983;
7. Ривкин С.С., и др. "Статистическая оптимизация навигационных систем", Л.: Судостроение, 1976;
8. Фролов B.C. "Радио-инерциальные системы наведения", М.: Советское радио, 1976;
9. "Инерциальные системы управления". / Под редакцией Д. Питмана. М.: Воениздат, 1967;
10. Рогожин В.О. и др. "Пiлотажно-навiгацiйнi комплекси повiтряних суден", К.: НАУ, 2005 (на украинском языке);
11. Фiляшкiн М.К. и др. "Iнецiально-супутнiковi навiгацiйнi системи", К.: "НАУ-друк", 2009 (на украинском языке).
ИНС могут быть платформенного или бесплатформенного типа. В качестве чувствительных элементов (ЧЭ) в ИНС используются гироскопы и акселерометры. На борту современных ЛА все большее применение находят ИНС бесплатформенного типа.
Современные ИНС имеют два основных режима работы: ПОДГОТОВКА и РАБОТА.
В режиме ПОДГОТОВКА осуществляется начальная выставка ИНС в горизонте и азимуте - определяется ориентация измерительных осей ИНС относительно местного горизонта и местного географического меридиана, а также формируются начальные значения определяемых в ИНС навигационно-пилотажных параметров.
В режиме РАБОТА, интегрируя составляющие векторов угловой скорости и ускорения, в ИНС определяют текущие значения навигационно-пилотажных параметров ЛА, а именно курс, крен, тангаж, составляющие вектора скорости и координаты местоположения ЛА.
ИНС обладают такими достоинствами, как автономность, помехозащищенность, скрытность и непрерывность работы, что обеспечивает их практически повсеместное применение в качестве основных навигационных систем в современной авиации.
Современные ИНС также достаточно надежны и точны, однако достигнутые в настоящее время уровни этих характеристик ИНС не в полной мере соответствуют требованиям, предъявляемым к современным ЛА. К недостаткам ИНС также следует отнести увеличение погрешностей ИНС со временем.
Для достижения необходимого уровня точности навигационно-пилотажные параметры, измеряемые ИНС, корректируют по данным от других, более точных, систем измерения координат и/или скорости, но которые не обладают вышеупомянутыми достоинствами ИНС.
В вышеупомянутой технической литературе приведены примеры использования для коррекции ИНС спутниковых навигационных систем (СНС), доплеровских измерителей скорости (ДИС), астросистем, радиотехнических систем дальней навигации (РСДН), радиотехнических систем ближней навигации (РСБН), систем визуальной ориентировки [1, 3, 4, 5, 7, 8, 10, 11].
СНС и РСДН неавтономны, подвержены помехам естественного и искусственного характера и могут иметь перерывы в работе. РСБН и ДИС также имеют перерывы в работе и подвержены помехам, а их работа связана с излучением электромагнитной энергии, что демаскирует ЛА. Работа астросистем и систем визуальной ориентировки сильно зависит от метеорологических условий и времени суток.
С учетом недостатков корректирующих систем в современных комплексных навигационных системах ЛА для коррекции данных ИНС наиболее часто применяется такой метод комплексной обработки информации (КОИ), как оптимальный фильтр Калмана (ОФК), описанный в вышеупомянутых книгах [1, 4, 7, 8, 10, 11].
Для целей коррекции ИНС структура ОФК базируется на представлении вектора "состояния ИНС" в виде системы линейных дифференциальных уравнений, описывающих погрешности ИНС, являющиеся функцией инструментальных погрешностей ЧЭ ИНС, параметров текущего местоположения ЛА, параметров его движения и погрешностей начальной выставки. Компоненты "вектора измерения погрешностей ИНС" формируются как разности соответствующих компонентов векторов скорости и координат местоположения ЛА, измеренных ИНС и корректирующей системой (КС). ОФК при наличии сигналов от КС производит оценку текущих погрешностей ИНС. При пропадании сигналов от КС ОФК осуществляет прогнозирование погрешностей ИНС на текущий момент времени, что является одним из основных достоинств ОФК.
При дальнейшем изложении параметры, уточненные по результатам КОИ, будем называть "гибридными".
Конкретные примеры структурных схем комплексных навигационных систем (КНС), в которых осуществляется коррекция ИНС от ДИС и СНС, приведены соответственно на стр. 176 [4] и стр. 209 [11].
Широко применяемым методом повышения уровня надежности является дублирование соответствующих систем. Так, для более надежного определения таких важных параметров, как курс, крен и тангаж, на борту большинства современных ЛА установлено не менее двух ИНС.
С учетом цели изобретения полагаем, что описание наиболее близкого к предлагаемому изобретению устройства (прототип) приведено одновременно в разделе 7.1 [4] и разделе 10 [11]. При этом также делаем предположения, не противоречащие содержанию этих книг, что на борту ЛА установлены две ИНС, одна КС, измеряющая текущие координаты и/или скорость ЛА, при оценке достоверности сигналов от ИНС и КС анализируются сигналы их исправности, а работой устройства управляет экипаж.
В качестве примеров КС, которые могут измерять одновременно координаты и скорость, только координаты и только скорость можно назвать СНС, РСДН и ДИС соответственно.
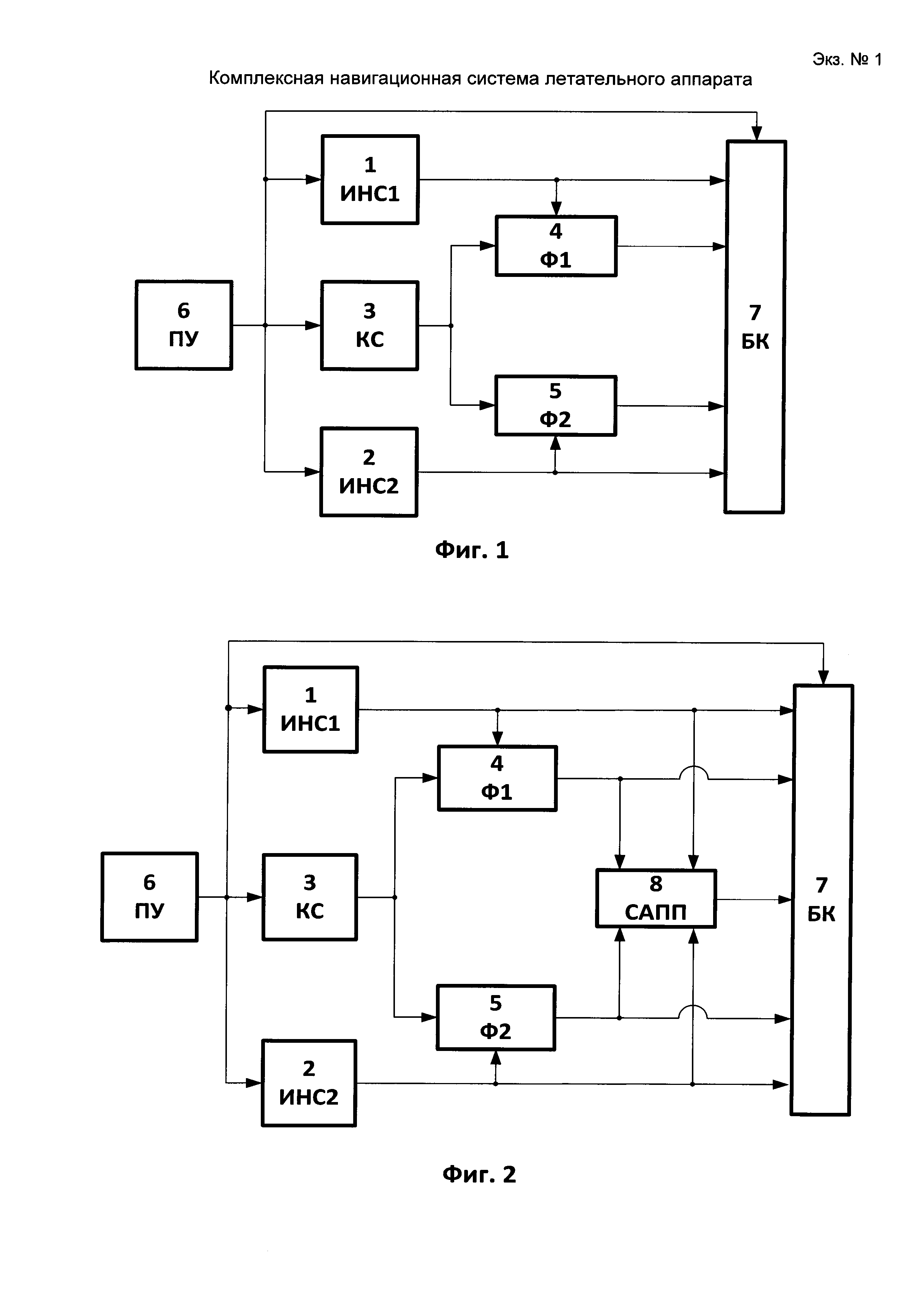
Структурная схема, которой можно иллюстрировать устройство-прототип, приведена на фиг. 1. На схеме обозначены две ИНС (1 - ИНС1, 2 - ИНС2), одна КС (3), два фильтра КОИ (4 - Ф1, 5 - Ф2), пульт управления (6 - ПУ) и блок коммутации (7 - БК). Выходами устройства являются выходы ИНС1, ИНС2, КС, Ф1, Ф2 и БК.
Таким образом, с учетом только существенных для предлагаемого изобретения признаков устройство-прототип состоит из двух инерциальных навигационных систем (ИНС1, ИНС2), корректирующей системы (КС), фильтра комплексной обработки информации ИНС1 и КС (Ф1), фильтра комплексной обработки информации ИНС2 и КС (Ф2), пульта управления (ПУ) и блока коммутации (БК), пять входов которого соединены соответственно с выходами ИНС1, ИНС2, Ф1, Ф2 и ПУ, причем выходы ИНС1 и ИНС2 также поданы соответственно на первые входы Ф1 и Ф2, вторые входы которых соединены параллельно с выходом КС, а выход ПУ также подан одновременно на входы ИНС1, ИНС2 и КС.
При исправной работе дублируемых систем всегда существует проблема выбора - данные от какой из систем более достоверны и предпочтительны для использования при решении целевых задач ЛА.
Наличие двух наборов гибридных данных еще более усложняет проблему выбора. Так, в системе, иллюстрирующей способ-прототип, при отсутствии отказов в ИНС1, ИНС2 и КС в наличии четыре идентичные по составу набора навигационно-пилотажных данных: два набора полностью автономных данных от ИНС1 и ИНС2 и два набора гибридных данных от Ф1 и Ф2. Достоверность и точность автономных данных зависят только от состояния ИНС1 и ИНС2, а достоверность и точность гибридных данных зависят не только от состояния ИНС1 и ИНС2, но и от состояния КС.
В составе комплексных систем современных ЛА выбор предпочтительной системы и предпочтительного набора данных в автоматическом режиме осуществляется путем анализа сигналов исправности ИНС1, ИНС2 и КС, а при отсутствии явных отказов решение задачи выбора доверяется экипажу, которому на ПУ предоставляются соответствующие органы для командования этим выбором.
Как показывает практика, в ИНС и КС могут присутствовать так называемые "скрытые отказы". Для ИНС такому отказу может соответствовать, например, повышенный нерегламентированный уровень погрешностей ЧЭ. Для КС, например для СНС, такому отказу может соответствовать наличие в их сигналах искусственных целенаправленных, а возможно и уводящих помех. Как правило, наличие скрытых отказов экипажу становится очевидным только через значительный промежуток времени после их возникновения.
Кроме этого, даже при полной исправности обеих ИНС и полном их соответствии техническим требованиям существует проблема выбора в качестве предпочтительной, более точной ИНС. Однако экипажу, в силу его загруженности множеством задач по управлению ЛА, достаточно трудно оценить текущие точностные характеристики исправных ИНС и принять оптимальное решение по выбору предпочтительной ИНС и предпочтительного набора данных.
Целью предлагаемого изобретения является расширение функциональных возможностей ЛА за счет повышения степени автоматизации решения по выбору предпочтительной ИНС и соответствующего набора навигационно-пилотажных данных, а также за счет повышения точности определения навигационно-пилотажных параметров.
Такое решение на борту ЛА может быть выработано полностью автоматически, что особенно актуально для беспилотных ЛА, или в рамках наиболее распространенной в настоящее время логики для пилотируемых ЛА его по-прежнему может принимать экипаж на основе автоматически формируемых рекомендаций.
Таким образом, с учетом только существенных для предлагаемого изобретения признаков в КНС ЛА, состоящую из двух инерциальных навигационных систем (ИНС1, ИНС2), корректирующей системы (КС), измеряющей координаты и/или скорости, фильтра комплексной обработки информации ИНС1 и КС (Ф1), фильтра комплексной обработки информации ИНС2 и КС (Ф2), пульта управления (ПУ) и блока коммутации (БК), пять входов которого соединены соответственно с выходами ИНС1, ИНС2, Ф1, Ф2 и ПУ, причем выходы ИНС1 и ИНС2 также поданы соответственно на первые входы Ф1 и Ф2, вторые входы которых соединены параллельно с выходом КС, а выход ПУ также подан одновременно на входы ИНС1, ИНС2 и КС, дополнительно введен блок сравнения и анализа текущих параметров и погрешностей ИНС1 и ИНС2 (САПП), четыре входа которого соединены соответственно с выходами ИНС1, ИНС2, Ф1 и Ф2, а выход подан на шестой вход блока коммутации.
Структурная схема предлагаемой КНС Л А приведена на фиг. 2. На схеме обозначены две ИНС (1 - ИНС1, 2 - ИНС2), одна КС (3), два фильтра КОИ (4 - Ф1, 5 - Ф2), пульт управления (6 - ПУ) и блок коммутации (7 - БК), блок сравнения и анализа текущих параметров и погрешностей ИНСТ и ИНС2 (8 - САЛП). Выходами устройства являются выходы ИНС1, ИНС2, КС, Ф1, Ф2 и БК.
Предлагаемая КНС функционирует следующим образом.
Обе ИНС, если они бесплатформенные, измеряют и определяют два набора следующих навигационно-пилотажных параметров движения ЛА: составляющие вектора угловой скорости по осям связанной системы координат (ωux, ωuy, ωuz, составляющие вектора ускорения по осям связанной системы координат αux, αuy, αuz, курс Ψu, крен γu, тангаж υu, составляющие скорости по осям географической системы координат Vun, Vue, географические координаты местоположения φu, λu.
КС измеряет географические широту и долготу ЛА φk, λk и/или составляющие скорости ЛА по осям географической системы координат Vkn, Vke.
Для формирования оценок погрешностей ИНС1 и ИНС2 данные от ИНС1, ИНС2 и КС обрабатывают в соответствии с любым из известных методов КОИ в фильтрах Ф1 и Ф2.
Сама по себе процедура оценки погрешностей ИНС1 и ИНС2 не является непосредственным предметом предлагаемого изобретения и поэтому в материалах заявки не описывается. Наиболее широко применяется для этих целей метод ОФК. Примеры применения метода ОФК для оценки погрешностей ИНС приведены в вышеупомянутых книгах. Отметим только, что для целей изобретения в векторы состояния ИНС 1 и ИНС2 должны быть включены погрешности их ЧЭ.
В результате работы фильтров КОИ Ф1 и Ф2 определяются оценки погрешностей ИНС1 и ИНС2 в определении углов ориентации, скорости и координат ЛА, которые компенсируются в выходных сигналах ИНС1 и ИНС2. В процессе КОИ производится также оценка погрешностей ЧЭ, входящих в состав ИНС. Например, постоянных составляющих дрейфов гироскопов, смещений нуля акселерометров, коэффициентов нелинейности характеристик гироскопов и акселерометров, параметров неортогональности измерительных осей гироскопов и акселерометров.
Выработанные значения оценок погрешностей ИНС1 и ИНС2 из Ф1 и Ф2 совместно с самими навигационно-пилотажными параметрами от ИНС1 и ИНС2 анализируются в блоке САПП для выработки решения о достоверности сигналов от КС, ИНС1, ИНС2 и определения предпочтительной ИНС и предпочтительного набора навигационно-пилотажных параметров.
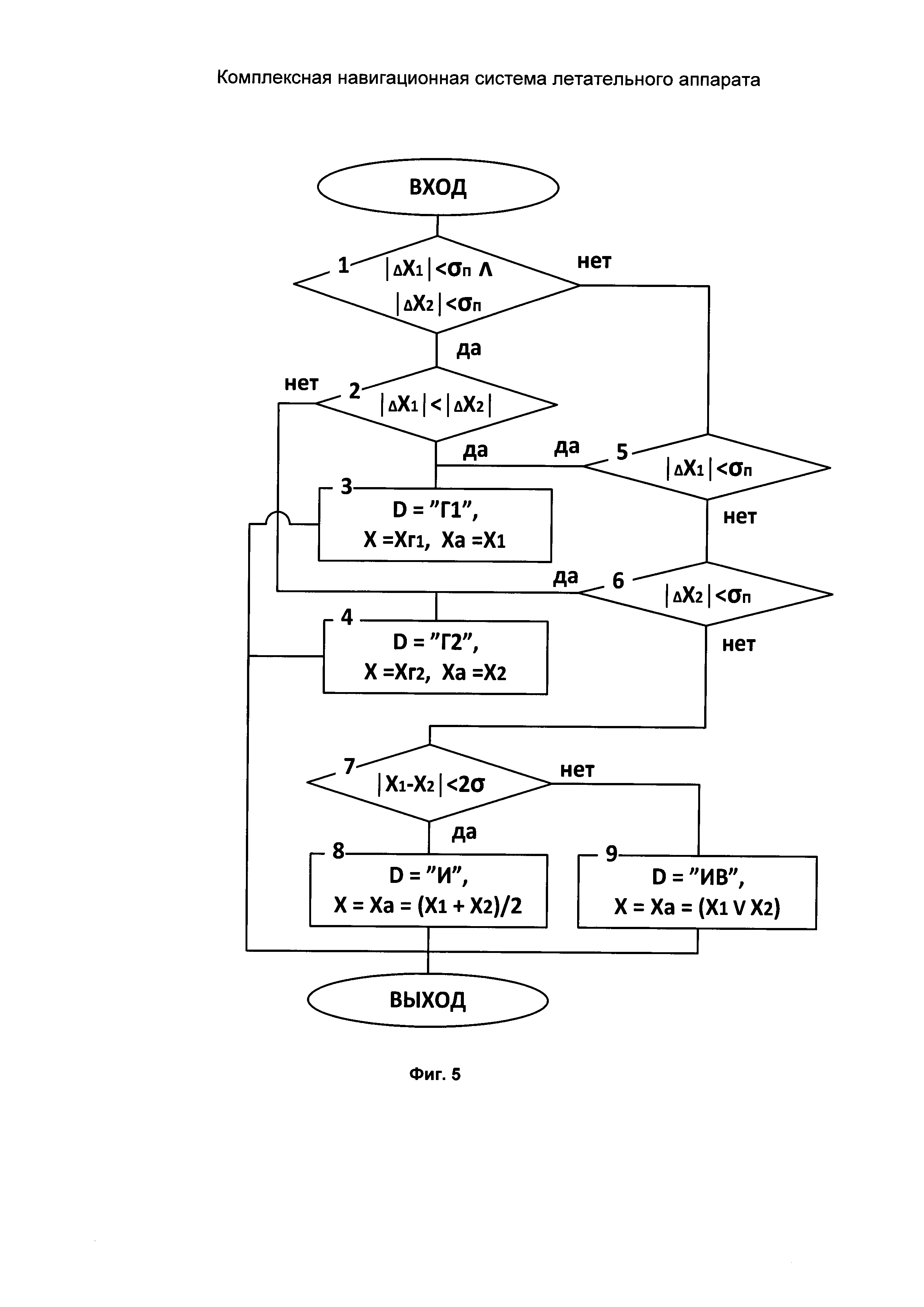
Пример логики работы САПП проиллюстрирован логической блок-схемой на фиг. 5.
На блок-схеме обозначены следующие параметры.
1. Входные векторные сигналы X1 и Х2 - автономные навигационно-пилотажные параметры соответственно из ИНС1 и ИНС2.
2. Входные векторные сигналы X1Г и Х2Г - гибридные навигационно-пилотажные параметры, полученные путем КОИ соответственно из Ф1 и Ф2.
3. Входные векторные сигналы ΔX1 и ΔХ2 - оценки погрешностей ИНС1 и ИНС2 на текущий момент времени соответственно из Ф1 и Ф2.
4. Выходной командный сигнал D, состояние которого является рекомендацией по выбору соответствующего набора данных в качестве основного и соответствующие ему выходные векторные сигналы основных навигационно-пилотажных параметров X и автономных навигационно-пилотажных параметров Ха.
5. Векторные константы σ и σп, характеризующие заданные точностные характеристики ИНС. Векторная константа σ характеризует заданные точностные характеристики параметров, измеряемых ИНС напрямую, т.е. координат, скорости, углов положения. Векторная константа σп включает в себя векторную константу σ и дополнительные параметры, характеризующие заданные точностные характеристики ЧЭ ИНС.
Их численные значения, например, могут быть следующими. Компоненты, соответствующие погрешностям по координатам σs=σsп=1.85 км×t, где t - время полета в часах. Компоненты, соответствующие погрешностям по скорости σv=σvп=1 м/с. Компоненты, соответствующие погрешностям по курсу σk=σкп=3 угл. мин + 2угл. мин × 1. Компоненты, соответствующие смещению нуля акселерометров ИНС σaп=10-4 м/с2. Компоненты, соответствующие постоянным составляющим дрейфов гироскопов ИНС σwп=10-2 гр./час и т.п.
6. Знаки логических и др. операций: < - меньше, ∧ - и, ∨ - или, |…| - модуль параметра.
Логика, иллюстрируемая данной блок-схемой, построена на предположении, что средствами встроенного контроля ИНС1, ИНС2 и КС определено, что все три системы исправны, работоспособны, их выходная информация сопровождается соответствующими сигналами достоверности и поэтому возможны только неконтролируемые скрытые отказы этих систем.
Блок-схема работает следующим образом.
1. В блоке 1 проверяется одновременное выполнение условий, что оценки погрешностей ИНС1 и ИНС2 не больше регламентированной для них величины. Если условия не выполняются, управление передается в блок 5. Если условия выполняются, то в блоке 2 параметры ΔX1 и ΔХ2 сравниваются между собой, по результатам сравнения определяется, какая из ИНС имеет меньшую погрешность, и соответствующим образом в блоках 3 или 4 параметр D переводится в состояние "Г1" или "Г2" и формируются наборы основных навигационно-пилотажных параметров X и автономных навигационно-пилотажных параметров Ха, после чего работа блок-схемы завершается.
2. В блоке 5 проверяется условие, что оценка погрешностей ИНС1 ΔX1 не больше регламентированной величины. Если условие выполняется, то управление передается в блок 3. Если условие не выполняется, то управление передается в блок 6, где проверяется условие, что оценка погрешности ИНС2 ΔХ2 не больше регламентированной величины. Если условие выполняется, то управление передается в блок 4, в противном случае управление передается в блок 7.
3. В блоке 7 проверяется условие, что рассогласование соответствующих автономных данных от ИНС1 и ИНС2 на текущий момент времени не больше регламентированной для нее величины. Если условие выполняется, параметр D в блоке 8 переводится в состояние "И", формируются выходные параметры X=Ха=(Х1+Х2)/2 и работа блок-схемы завершается. Если условие не выполняется, в блоке 9 параметры D и Da переводятся в состояние "ИВ", в соответствии с выбором экипажа формируются выходные параметры X=Ха=(X1 ∨ Х2) и работа блок-схемы завершается.
В результате у сигнала D возможны четыре состояния:
1. D="Г1" - основным рекомендуется набор гибридных данных от ИНС1 и КС, а в качестве автономных данных рекомендуется набор автономных данных от ИНС1;
2. D="Г2" - основным рекомендуется набор гибридных данных от ИНС2 и КС, а в качестве автономных данных рекомендуется набор автономных данных от ИНС2;
3. D="И" - приоритет определить невозможно, т.к. в КС возможен скрытый отказ, а наборы автономных данных от ИНС1 и ИНС2 соответствуют техническим требованиям к ИНС и одинаково достоверны. Рекомендуется в качестве основного набора данных и набора автономных данных среднее значение автономных данных от ИНС1 и ИНС2;
4. D="ИВ" - приоритет определить невозможно, т.к. в КС и ИНС возможны скрытые отказы. Предполагая пренебрежительно малую вероятность одновременного скрытого отказа в обоих ИНС, экипажу рекомендуется выбрать в качестве основного набора данных и набора автономных данных набор автономных данных от одной из ИНС, но требуется повышенное внимание при их использовании и, по возможности, привлечение дополнительной информации для оценки их достоверности.
В блоке коммутации с учетом сигналов исправности и достоверности соответствующих наборов данных, а также в зависимости от состояния сигнала D из САГШ и указаний экипажа из ПУ принимается окончательное решение о приоритетной ИНС, приоритетном наборе навигационно-пилотажных данных и коммутации соответствующих данных на выходе БК.
Даже при полной исправности ИНС и полном их соответствии техническим требованиям существует проблема более "тонкого" выбора предпочтительной ИНС. Так, для современных ИНС стандартным является следующее требование по скорости нарастания погрешности определения координат местоположения: ΔS<1.85 км/ч (морская миля за час полета), где ΔS - удвоенная среднеквадратическая погрешность. Т.е. через два часа полета у ИНС погрешность определения координат местоположения должна находиться в диапазоне ±3.7 км. При этом, если через два часа полета ИНС1 и ИНС2 имеют соответственно погрешности 2 км и 3 км, то это, учитывая физические основы работы ИНС, совсем не означает, что ИНС1 будет более точной и через три часа полета. Одной из причин этого является зависимость погрешностей ИНС от характера траектории полета. И если траектория на третьем часе полета, и соответственно возмущающие воздействия на ИНС, будут существенно другими по отношению к первым двум часам полета, то вполне возможно, что ИНС2 в конце 3-го часа полета будет точнее ИНС1.
Поскольку целевые задачи ЛА, как правило, привязаны к определенным точкам маршрута или к определенному времени, а в наиболее важные моменты полета ЛА в работе КС возможны перерывы, то в изобретении дополнительно предлагается принимать решение о выборе предпочтительной ИНС и соответствующего набора пилотажно-навигационных данных на основе данных о прогнозе погрешностей ИНС1 и ИНС2 в наиболее ответственные моменты полета ЛА - в конкретных точках маршрута или в конкретные моменты времени.
В этом случае поставленные цели обеспечиваются тем, что на борту ЛА периодически в ускоренном темпе времени осуществляется имитационное моделирование его полета от точки текущего местоположения до заданной точки маршрута, которая либо является целевой точкой полета, либо определена заданным интервалом времени. В качестве целевых параметров полета при моделировании используются заданные параметры полета. Параметры маршрута, являющегося составной частью полетного задания, например координаты навигационных точек (НТ), заданная скорость и заданная высота для различных участков маршрута, курс выхода на НТ, заданное время прилета в НТ и др., на борту современных ЛА хранятся в соответствующих устройствах памяти и доступны потребителям.
В процессе моделирования полета осуществляется прогнозирование погрешностей ИНС1 и ИНС2 путем решения в моделируемом масштабе времени системы дифференциальных уравнений, описывающих погрешности ИНС1 и ИНС2. При этом в этих уравнениях в качестве начальных значений погрешностей ИНС1 и ИНС2 используются оценки погрешностей ИНС1 и ИНС2 на текущий момент времени, полученные по результатам КОИ ИНС1, ИНС2 и КС.
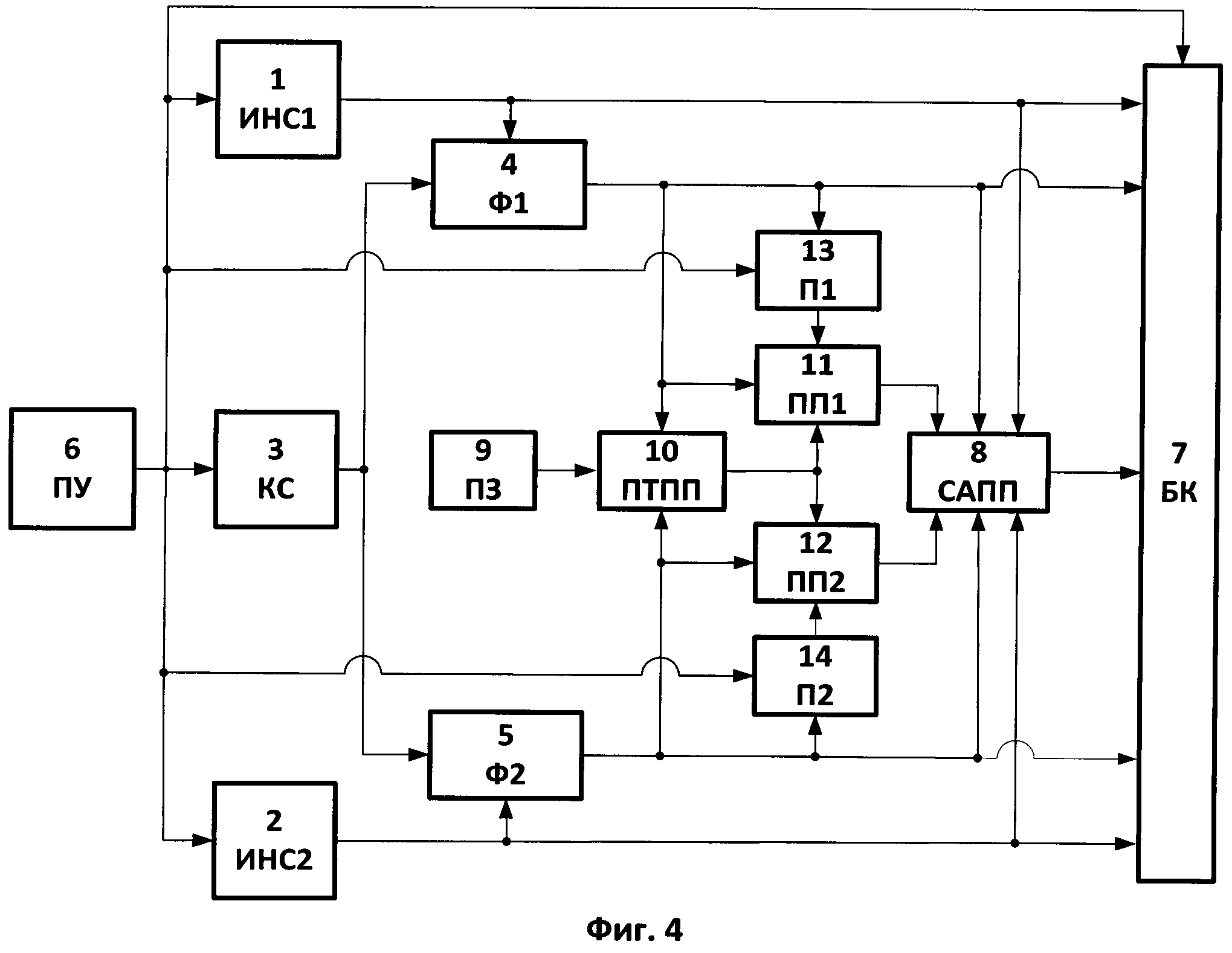
Таким образом, в КНС ЛА дополнительно введены блок памяти полетного задания (ПЗ), блок прогнозирования траектории и параметров полета (ПТПП), блок прогнозирования погрешностей ИНС1 (ПП1) и блок прогнозирования погрешностей ИНС2 (ПП2), причем пятый и шестой входы САПП соответственно через ПП1 и ПП2 соединены соответственно с выходами Ф1 и Ф2, а вторые входы ПП1 и ПП2 одновременно соединены с выходом ПТПП, три входа которого соединены с выходами ПЗ, Ф1 и Ф2 соответственно.
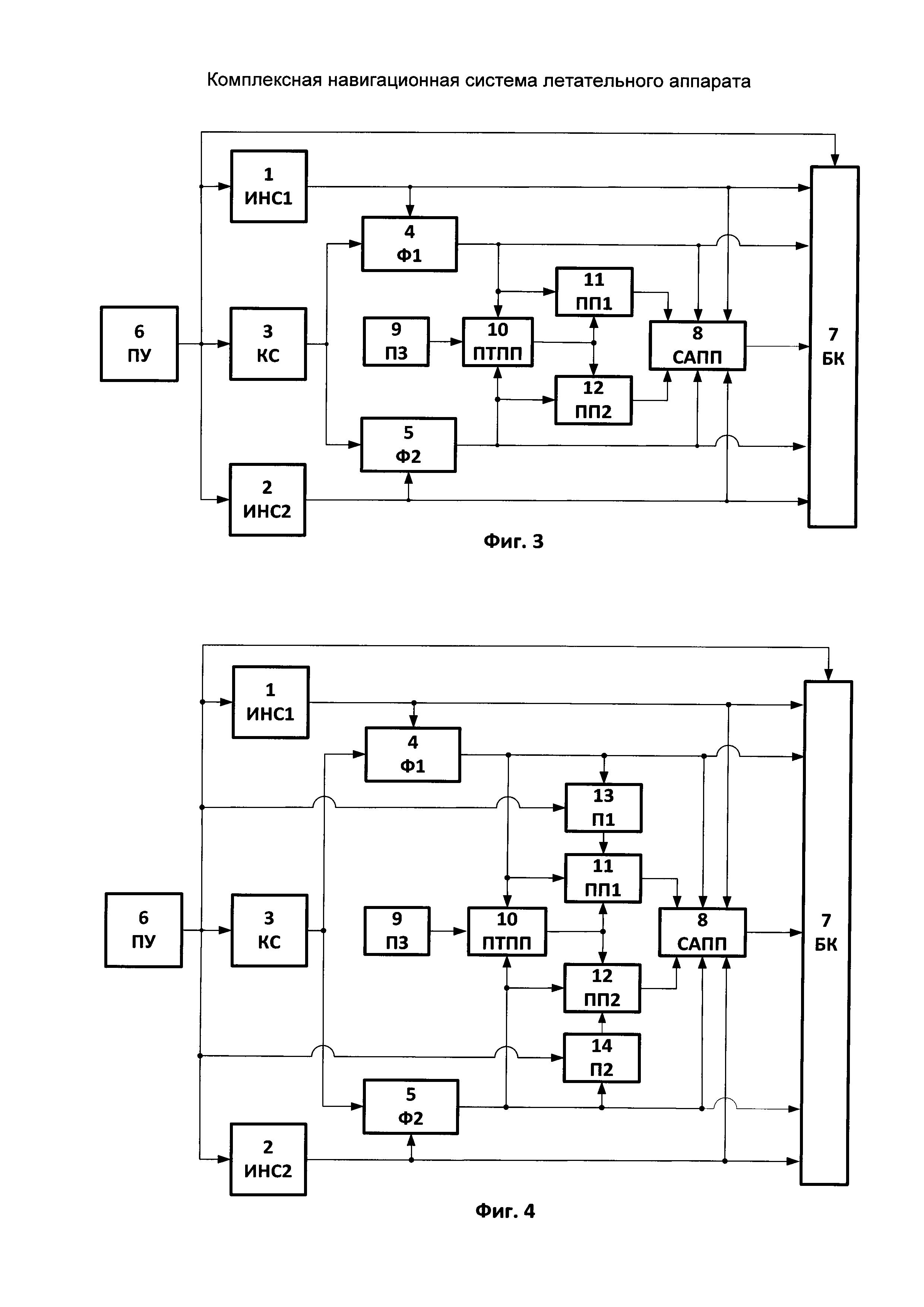
Структурная схема этой КНС ЛА приведена на фиг. 3. На схеме обозначены две ИНС (1 - ИНС1, 2 - ИНС2), одна КС (3), два фильтра КОИ (4 - Ф1, 5 - Ф2), пульт управления (6 - ПУ) и блок коммутации (7 - БК), блок сравнения и анализа текущих параметров и погрешностей ИНС 1 и ИНС2 (8 - САПП). блок памяти полетного задания (9 - ПЗ), блок прогнозирования траектории и параметров полета (10 - ПТПП), два блока прогнозирования погрешностей ИНС (11 - ПП1, 12 - ПП2). Выходами устройства являются выходы ИНС1, ИНС2, КС, Ф1, Ф2 и БК.
Параллельно процедурам оценки погрешностей ИНС1 и ИНС2 в ПТПП периодически, например с периодом в одну или две минуты, в ускоренном темпе времени моделируют полет ЛА по заданному маршруту от точки текущего местоположения ЛА до заданной точки маршрута или на заданный интервал времени. Параметры заданного маршрута извлекают из блока ПЗ. В процессе моделируемого полета в масштабе моделируемого времени в ПП1 и ПП2 решают системы дифференциальных уравнений, описывающих погрешности ИНС1 и ИНС2. При этом в этих уравнениях в качестве начальных значений погрешностей ИНС1 и ИНС2, используются оценки погрешностей ИНС1 и ИНС2 полученные в Ф1 и Ф2 на момент начала очередного такта моделирования полета ЛА.
Сама по себе процедура моделирования полета ЛА по маршруту в блоке ПТПП не является непосредственным предметом предлагаемого изобретения и поэтому в материалах заявки подробно не описывается.
Вопросы моделирования движения ЛА и формирования в процессе моделирования соответствующих навигационно-пилотажных параметров рассмотрены в разделе 4.6 [1] и главе 8 [3]. Отметим, что возможности бортовых систем современного ЛА, в частности его вычислительных систем, могут обеспечить очень существенное ускорение моделируемого времени относительно реального времени. Как показывают расчеты, коэффициент ускорения времени при решении данной задачи в бортовых вычислительных системах современных ЛА может достигать значения 50÷100, т.е. полет длительностью в один час может быть промоделирован на борту ЛА за 0.5÷1.2 мин.
Процедура опережающего прогнозирования погрешностей ИНС в блоках ПП1 и ПП2 по существу соответствует работе вышеупомянутых фильтров КОИ по оценке погрешностей ИНС1 и ИНС2 при отсутствии данных от КС, т.е. работе фильтров КОИ в масштабе моделируемого времени по прогнозированию погрешностей ИНС1 и ИНС2.
Цикл моделирования полета ЛА по маршруту заканчивается после достижения заданной точки маршрута или в заданный момент моделируемого времени.
В этом случае логика работы САПП по определению предпочтительной ИНС и предпочтительного набора навигационно-пилотажных параметров практически полностью идентична логике, проиллюстрированной логической блок-схемой на фиг. 5, за теми исключениями, что вместо оценок погрешностей ИНС1 и ИНС2 ΔХ1 и ΔХ2 из Ф1 и Ф2 используется прогноз оценок погрешностей ИНС1 и ИНС2 на момент окончания моделирования, а компоненты векторных констант σ и σп зависят также от времени моделирования, например параметры, характеризующие точностные требования к координатам и курсу σs=σsп=1.85 км×(t+м), σk=σкп=3 угл. мин + 2 угл. мин × (t+tм), где tм - время моделируемого полета в часах.
Как уже говорилось выше, все КС имеют различные недостатки, в частности могут иметь существенные перерывы в работе. Более того, могут существовать ситуации, при которых в течение всего полета будет отсутствовать достоверная информация от КС, например ее полный отказ. Для обеспечения работоспособности предлагаемого устройства в таких ситуациях возможно использование оценок погрешностей ЧЭ ИНС1 и ИНС2, которые были получены по результатам КОИ от ИНС1 и КС, ИНС2 и КС в предыдущих полетах.
В процессе полета может осуществляться прогнозирование погрешностей ИНС1 и ИНС2 путем решения в реальном масштабе времени двух систем дифференциальных уравнений, описывающих погрешности ИНСТ и ИНС2. При этом в этих уравнениях начальные значения погрешностей ИНС1 и ИНС2 за исключением погрешностей чувствительных элементов ИНС1 и ИНС2 должны быть нулевыми.
Для реализации указанной возможности в КНС ЛА дополнительно введены два блока памяти (П1, П2), выходы которых соответственно поданы на третьи входы ПП1 и ПП2, причем первые входы П1 и П2 соединены соответственно напрямую с выходами Ф1 и Ф2, а на вторые входы П1 и П2 параллельно подан выход ПУ.
Структурная схема этой КНС ЛА приведена на фиг. 4. На схеме обозначены две ИНС (1 - ИНС1, 2 - ИНС2), одна КС (3), два фильтра КОИ (4 - Ф1, 5 - Ф2), пульт управления (6 - ПУ) и блок коммутации (7 - БК), блок сравнения и анализа текущих параметров и погрешностей ИНС1 и ИНС2 (8 - САПП), блок памяти полетного задания (9 - ПЗ), блок прогнозирования траектории и параметров полета (10 - ПТПП), два блока прогнозирования погрешностей ИНС (11 - ПП1, 12 - ПП2), два блока памяти (13 - П1, 14 - П2). Выходами устройства являются выходы ИНС1, ИНС2, КС, Ф1, Ф2 и БК.
В этом случае процедура определения оценок погрешностей ИНС1 и ИНС2 в ПП1 и ПП2 на текущий момент времени с использованием предварительно определенных оценок погрешностей чувствительных элементов ИНС1 и ИНС2 из П1 и П2 по существу эквивалентна работе вышеупомянутых фильтров КОИ в реальном масштабе времени по оценке погрешностей ИНС1 и ИНС2 при полном отсутствии данных от КС, т.е. работе фильтров КОИ в режиме прогноза в течение всего полета.
Таким образом, на примере технической реализации показано, что дополнительно введенные в КНС блоки обеспечивают расширение функциональных возможностей ЛА за счет повышения степени автоматизации решения по выбору предпочтительной ИНС и соответствующего набора пилотажно-навигационных параметров, а также за счет повышения точности определения навигационно-пилотажных параметров.
Комплексная система навигации и управления летательного аппарата
Способ определения скорости ветра на борту летательного аппарата и устройство, его реализующее
Способ закалки листовых заготовок из алюминиевого сплава д16
Способ обнаружения пожара
Способ управления летательным аппаратом при заходе на посадку
Способ производства гайки
Акселерометр
Компенсационный акселерометр
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Многофункциональный тяжелый транспортный вертолет круглосуточного действия, комплекс бортового радиоэлектронного оборудования, используемый на данном вертолете
Комплексная система навигации и управления летательного аппарата
Способ определения скорости ветра на борту летательного аппарата и устройство, его реализующее
Способ закалки листовых заготовок из алюминиевого сплава д16
Способ обнаружения пожара
Способ управления летательным аппаратом при заходе на посадку
Способ производства гайки
Акселерометр
Компенсационный акселерометр
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Многофункциональный тяжелый транспортный вертолет круглосуточного действия, комплекс бортового радиоэлектронного оборудования, используемый на данном вертолете

