Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ КАБИНЫ ЛИФТА
Вид РИД
Изобретение
Изобретение относится к способу контроля движения кабины лифта, электронного устройства управления для контроля движения кабины лифта, а также кабины лифта с соответствующим управляющим устройством.
Динамически подвижные объекты, как в представленном исполнении лифты, соответственно кабины лифта, должны, как правило, из соображений безопасности превышать заданные ускорения и скорости, поскольку иначе не могут быть более исключены как поражения перевозимых людей, так и собственно повреждения на подвижном объекте. Поэтому, как правило, предусмотрено устройство управления, адаптированное к объекту, которое распознает слишком большое ускорение и соответственно уменьшает движущий момент, соответственно при слишком высокой скорости активирует функцию торможения.
Из состояния развития техники известны в связи с этим, с одной стороны, механические устройства, которые при слишком высокой скорости активируют аварийную систему торможения. Также известны электронные устройства управления, которые на основе зарегистрированных сигналов датчиков ускорения, соответственно скорости, включают снижение движущего момента, соответственно функцию торможения. Из соображений безопасности при этом зачастую задействуются две различные физические величины датчиков для определения скорости, соответственно ускорения.
Кроме того, известно, что посредством сигнала датчика скорости дополнительно может вычисляться ускорение, и наоборот, посредством сигнала датчика ускорения может дополнительно вычисляться скорость.
Большое значение при таком типе электронных устройств управления имеет то, что распознавание превышения критической пороговой величины безопасности должно происходить достаточно быстро, чтобы перед возникновением опасности травмирования или повреждения можно было гарантированно задействовать подходящие контрмеры (например, снижение движущего момента или активацию функции торможения).
Это особенно важно при использовании в лифтах, где, например, при отказе средств удерживания, могут наступить условия свободного падения, что может привести к быстрому возрастанию скорости падения. Распознавание превышения пороговой величины безопасности зачастую комбинируется с помощью проверки достоверности сигналов датчиков, а также с помощью электронных средств контроля.
Известные проверки достоверности сигналов датчиков ускорения и скорости имеют следующие недостатки:
- длительное время распознавания ошибки и время проверки достоверности из-за предшествующего (на основе модели) пересчете сигнала ускорения в сигнал скорости и соответственно наоборот,
- высокие пороги обнаружения ошибок и позднее введение необходимых контрмер в случае слишком большого ускорения, соответственно слишком большой скорости, и
- большие сложности применения при калибровке датчиков, а также алгоритмов пересчета (на основе модели).
Согласно идее изобретения при этом предлагается одновременно использовать для проверки достоверности по меньшей мере два сигнала датчиков ускорения и по меньшей мере один сигнал датчика скорости или один сигнал датчика перемещения. Альтернативно, одновременно используются для проверки достоверности по меньшей мере один сигнал датчика ускорения и по меньшей мере два сигнала датчиков скорости или два сигнала датчиков перемещения или используются для проверки достоверности одновременно два сигнала датчиков ускорения и по меньшей мере два сигнала датчиков скорости или два сигнала перемещения. При этом становится возможным как существенно более быстрое распознавание ошибки сигнала датчика, так и существенно более быстрое задействование контрмер при распознавании превышенной скорости или превышенного ускорения.
Предпочтительно, используемые величины движения непрерывно подвергаются проверке достоверности и/или проверке на ошибку. При этом могут быть созданы автономно работающие устройства, которые могут надежно контролировать движение. Соответствующие сигналы датчиков оцениваются преимущественно в электронном устройстве управления (ECU). ECU преимущественно размещено на динамически подвижном объекте, соответственно на кабине лифта.
Кабина лифта, как правило, удерживается средствами удерживания. Средства удерживания для этого проходят через управляющие ролики, которые размещены на кабине лифта. При этом может быть уменьшена требуемая сила удержания в средстве удержания, соответственно полиспаст фактору, определенному через размещение направляющих роликов. Предпочтительно, по меньшей мере датчики скорости или датчики перемещения для регистрации сигналов датчиков скорости или сигналов датчиков перемещения совместно сконструированы с направляющими роликами или в них интегрированы. Направляющие ролики из-за высокой несущей нагрузки надежно приводятся в движение несущим средством и соответствующие сигналы датчика скорости или сигналы датчика перемещения соответственно являются точными и надежными.
Предпочтительно, электронное устройство управления (ECU), соответственно его процессорные блоки с вычислительным устройством для оценки полученных сигналов датчиков скорости или сигналов датчиков перемещения, также размещены в непосредственной близости от направляющих роликов. Во всяком случае, детали датчика, например инкрементальный датчик (датчик перемещения вала) для получения маркировок перемещения вала направляющих роликов, размещены непосредственно на монтажной плате процессорного блока. Предпочтительно, датчик ускорения, соответственно избыточный датчик ускорения для регистрации сигналов датчика ускорения, могут быть также размещены на этой плате. При этом общая проверка ошибки и достоверности может быть осуществлена на месте регистрации соответствующих сигналов. Предпочтительно, если кабина лифта имеет несколько направляющих роликов, по меньшей мере два направляющих ролика оснащены соответствующими процессорными блоками с вычислительным устройством. Так, могут быть как скомбинированы отдельные измеренные величины для проверки ошибок и достоверности, так могут быть сравнены результаты отдельных вычислительных устройств.
Соответствующий изобретению способ включает предпочтительно первый уровень активации, который делает возможным уменьшение, соответственно корректировку, движущего момента привода динамически подвижного объекта, соответственно кабины лифта. Для этого преимущественно применяется два датчика ускорения, которые предпочтительно конструктивно, как выше описано, интегрированы в ECU. Контроль обоих сигналов датчиков ускорения a1 и a2 осуществляется при этом, например, посредством сравнения обоих сигналов датчиков ускорения. Если оба сигнала ускорений в сущности одинаковые, то налицо верная величина. Главным образом, равенство может быть оценено на основании неравенства  . Если абсолютная величина
. Если абсолютная величина  находится выше заданной пороговой величины, то один из двух сигналов датчика является ошибочным. Как только констатируется подобного типа ошибка, генерируется, например, сигнал предупреждения, на основании которого, например, может предприниматься проверка. Если абсолютная величина
находится, наоборот, ниже заданной пороговой величины, то можно надежно контролировать ускорение с помощью величин датчиков ускорения. Если измеренное ускорение превышает заданную пороговую величину для ускорения, то появляется информация безопасности, на основании которой, во всяком случае, прежде всего может осуществляться корректировка движущего момента. Корректировкой может быть, в зависимости от состояния нагрузки и направления движения кабины лифта, уменьшение или повышение движущего момента. Эта корректировка или регулировка движущего момента, однако, осуществляется многократно через собственную, встроенную в двигатель кабины лифта, регулировку двигателя, за счет чего этот первый уровень активации может также отсутствовать. Независимо от этого, измеренная величина сигнала датчика для регулировки двигателя для информации о вале или для другой информации движения могут быть конечно представлены в распоряжение для управления всем лифтом. Проверка достоверности сигнала ускорения с сигналом скорости или с сигналом перемещения может осуществляться, как приведено ранее, путем прямого сравнения или также посредством пересчета других величин движения. Эта проверка достоверности служит при этом предпочтительно общему контролю сигналов датчика.
находится выше заданной пороговой величины, то один из двух сигналов датчика является ошибочным. Как только констатируется подобного типа ошибка, генерируется, например, сигнал предупреждения, на основании которого, например, может предприниматься проверка. Если абсолютная величина
находится, наоборот, ниже заданной пороговой величины, то можно надежно контролировать ускорение с помощью величин датчиков ускорения. Если измеренное ускорение превышает заданную пороговую величину для ускорения, то появляется информация безопасности, на основании которой, во всяком случае, прежде всего может осуществляться корректировка движущего момента. Корректировкой может быть, в зависимости от состояния нагрузки и направления движения кабины лифта, уменьшение или повышение движущего момента. Эта корректировка или регулировка движущего момента, однако, осуществляется многократно через собственную, встроенную в двигатель кабины лифта, регулировку двигателя, за счет чего этот первый уровень активации может также отсутствовать. Независимо от этого, измеренная величина сигнала датчика для регулировки двигателя для информации о вале или для другой информации движения могут быть конечно представлены в распоряжение для управления всем лифтом. Проверка достоверности сигнала ускорения с сигналом скорости или с сигналом перемещения может осуществляться, как приведено ранее, путем прямого сравнения или также посредством пересчета других величин движения. Эта проверка достоверности служит при этом предпочтительно общему контролю сигналов датчика.
Предпочтительно, по меньшей мере два сигнала ускорения оцениваются непосредственно и без предварительного преобразования, соответственно обработки.
Из этого возникает преимущество, что очень чувствительно и быстро может указываться на изменение скорости динамически подвижного объекта, соответственно кабины лифта, поскольку уже выявлена тенденция для высокой скорости, и движущий момент может быть заранее откорректирован. В дальнейшем под названием объект понимается кабина лифта. Движением объекта является движение лифта, или скорость объекта - это скорость движения кабины лифта, и т.д.
Пороговая величина для ускорения, при превышении которой осуществляется корректировка движущего момента или отключение движущего момента, предпочтительно задана таким образом, что допустимое максимальное ускорение превышается. Измеренное ускорение должно, таким образом, быть выше допустимого ускорения, чтобы движущий момент уменьшить или отключить.
Преимущественно при выдаче информации безопасности, кроме того, предусмотрен второй уровень активации, который предпочтительно независим от первого уровня активации. Второй уровень активации активирует по меньшей мере устройство торможения (например, аварийную систему торможения и/или отключает движущий момент). Это происходит преимущественно на основе слишком высокого фактического ускорения v, при необходимости, по меньшей мере дополнительно в комбинации со слишком высоким фактическим ускорением a1, соответственно a2. Проверка сигнала датчика и проверка его достоверности происходит преимущественно, как до этого описано ранее.
Уже описанный контроль ускорения на превышение порогового ускорения делает возможным распознать множество неисправных условий работы, однако, не все неисправные условия работы. Особенно ускорения, лежащие ниже порогового ускорения, могут также вести к критическим по безопасности превышениям пороговой скорости. Такие превышения пороговой скорости могут быть распознаны через контроль величины скорости.
Например, применяется величина скорости, которая рассчитана из сигнала датчика ускорения, т.е. скорость согласно
Va=F(a1, a2),
где F - подходяще выбранное правило вычисления зависимых по времени ускорений a1, соответственно a1 и a2. Предпочтительно, речь идет при F об интегральном исчислении. Отсюда следует преимущество, что первый и второй уровни активации базируются на одном сигнале датчика (преимущественно ускорения) и тем самым соответствуют вводимым мерам согласно первому уровню активации и второму уровню активации. Проверка достоверности и контроль величины скорости, полученной из датчика ускорения, с сигналом датчика скорости v осуществляется предпочтительно через соотношение
 .
.
Альтернативно проверка достоверности и при этом контроль полученной величины скорости, полученной из датчика ускорения, может также осуществляться с сигналом датчика перемещения s. При этом предпочтительно путем дифференциального исчисления D рассчитывается сигнал датчика скорости V из сигнала датчика перемещения s следующим образом:
V=D(s), и
проверка достоверности и контроль величины скорости, полученной из датчика ускорения, с сигналом датчика перемещения s осуществляется предпочтительно через соотношение
 , соответственно
, соответственно  .
.
Если пороговая величина ε1 превышена, то сигналы датчиков более не правдоподобны и система в аварийной ситуации должна непосредственно переводиться в безопасное состояние.
При этом сигнал датчика скорости, соответственно сигнал датчика перемещения имеет предпочтительно задачу контроля сигнала скорости, рассчитанного из сигналов датчиков ускорения. Посредством перерасчета сигналов датчиков ускорения в сигнал скорости и, во всяком случае, путем непрерывного перерасчета сигналов датчиков перемещения в сигнал скорости, можно провести прямое сравнение скоростей. Через фильтрацию сигналов и перерасчет (основанный на модели) величины сигналов, можно, по сравнению с чистым контролем, базирующимся на датчиках ускорения, придти к некоторому временному запаздыванию. Быстрые изменения движения могут учитываться посредством контроля величины ускорения, а медленные изменения движения могут учитываться посредством контроля величины скорости.
Если вырисовывается через контроль величины порога ε для порогового ускорения ошибочное отношение датчиков, то можно путем применения трех датчиков (двух датчиков ускорения и одного датчика скорости или одного датчика перемещения) сохранить невосприимчивость к сбоям. При этом дополнительно предпочтительно проводится следующий перерасчет:
Va1=F(a1) и Va2=F(a2)
Предпочтительно различают следующие варианты:
если Va1 и V находятся в заданном интервале допуска, Va2 и V, наоборот, вне заданного интервала допуска, то a2 неверно;
если Va2 и V находятся в заданном интервале допуска, Va1 и V, наоборот, вне заданного интервала допуска, то a1 неверно;
если a1 и a2 находятся в заданном интервале допуска, Va1 и V, а также Va2 и V, наоборот, вне заданного интервала допуска, то V неверно.
Это различие вариантов, предпочтительно, осуществляется, когда по общим причинам могут быть исключены базовые ошибки (так называемые Common-Cause-Fehler) имеющихся избыточных датчиков. Если они не исключены, то иногда a1 и a2 могут из-за неизвестных общих отклонений от начальной калибрированной величины находиться в заданном интервале допуска Va1 и V, а Va2 и V вне заданного интервала допуска. В этом случае не V, а a1 и a2 были бы неверными. Поэтому предпочтительно реализован алгоритм классификации ошибок, чтобы распознать отказ по общим причинам (Common-Cause-Fehler) от (любых) двух или трех датчиков или применяются различные марки датчиков, чтобы исключить по общим причинам базовые ошибки.
Подобного типа или универсального типа обработка ошибок делает возможным, несмотря на распознанную ошибку, еще поддерживать базовую функциональность до конца соответствующего применения соразмерного интервала профилактического осмотра. Благодаря этому может быть, кроме того, поставлен точный диагноз (например, должен ли датчик скорости или датчик ускорения быть заменен). Констатация неисправного датчика может вызвать, например, требование к техническому обслуживанию.
Далее возможно и предпочтительно, чтобы применялись сигналы датчика скорости, чтобы рассчитать сигнал ускорения. В этом случае вместо интегрального исчисления применяется предпочтительно дифференциальное исчисление для расчета сигнала ускорения исходя из сигнала датчика скорости. Описанная обработка и применение сигналов скорости и сигналов ускорения соответственно взаимозаменяемы.
Предпочтительно, вместо фиксированной пороговой величины может быть обработана также динамическая пороговая величина. Пороговые величины в этом случае зависимы от соответствующих условий работы объекта, например, скорости объекта или расстояния от объекта до препятствия или до конца пути.
Далее предпочтительно, чтобы датчики однократно перед применением в определенных временных интервалах в период их применения, нерегулярно или по необходимости подвергались известному способу калибровки. Также возможен и предпочтителен саморегулируемый способ калибровки. Точно также любые комбинации названного способа калибровки возможны и предпочтительны.
Предпочтительно проводится между собой взаимный контроль всех применяемых датчиков.
Предпочтительно задействуется соответствующее изобретению устройство безопасности для случаев применения, при которых обобщенно требуется минимальное ускорение или минимальная скорость так, что при несоблюдении минимального ускорения или минимальной скорости могут быть также введены аналогично подходящие меры безопасности.
Другие предпочтительные формы осуществления изобретения вытекают из подпунктов и последующего описания примеров осуществления изобретения посредством чертежей.
На чертежах показано:
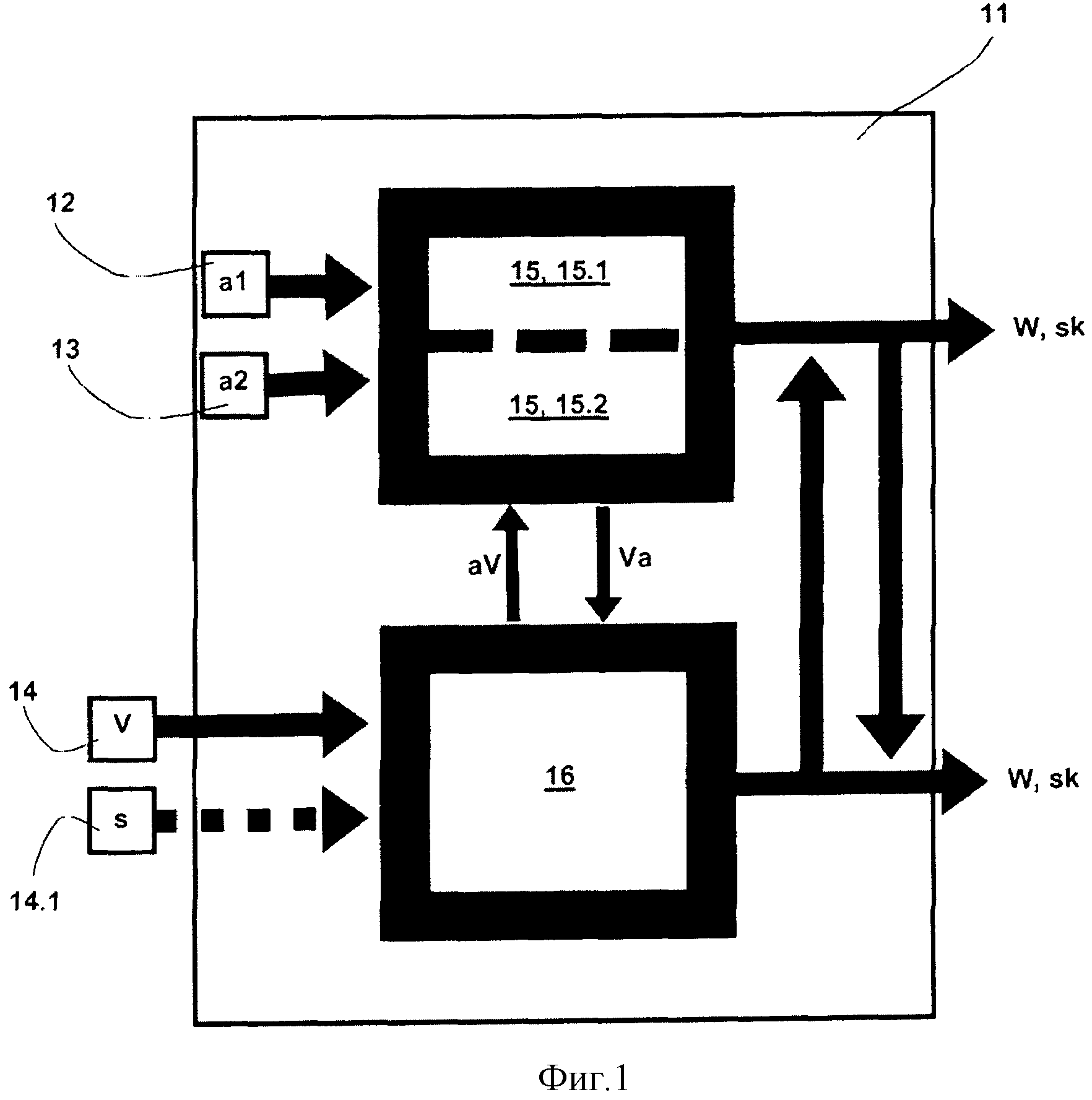
фиг. 1 - схематическая структура устройства безопасности;
фиг. 2 - первый примерный алгоритм способа контроля движения кабины лифта;
фиг. 3 - другой примерный алгоритм способа контроля движения кабины лифта; и
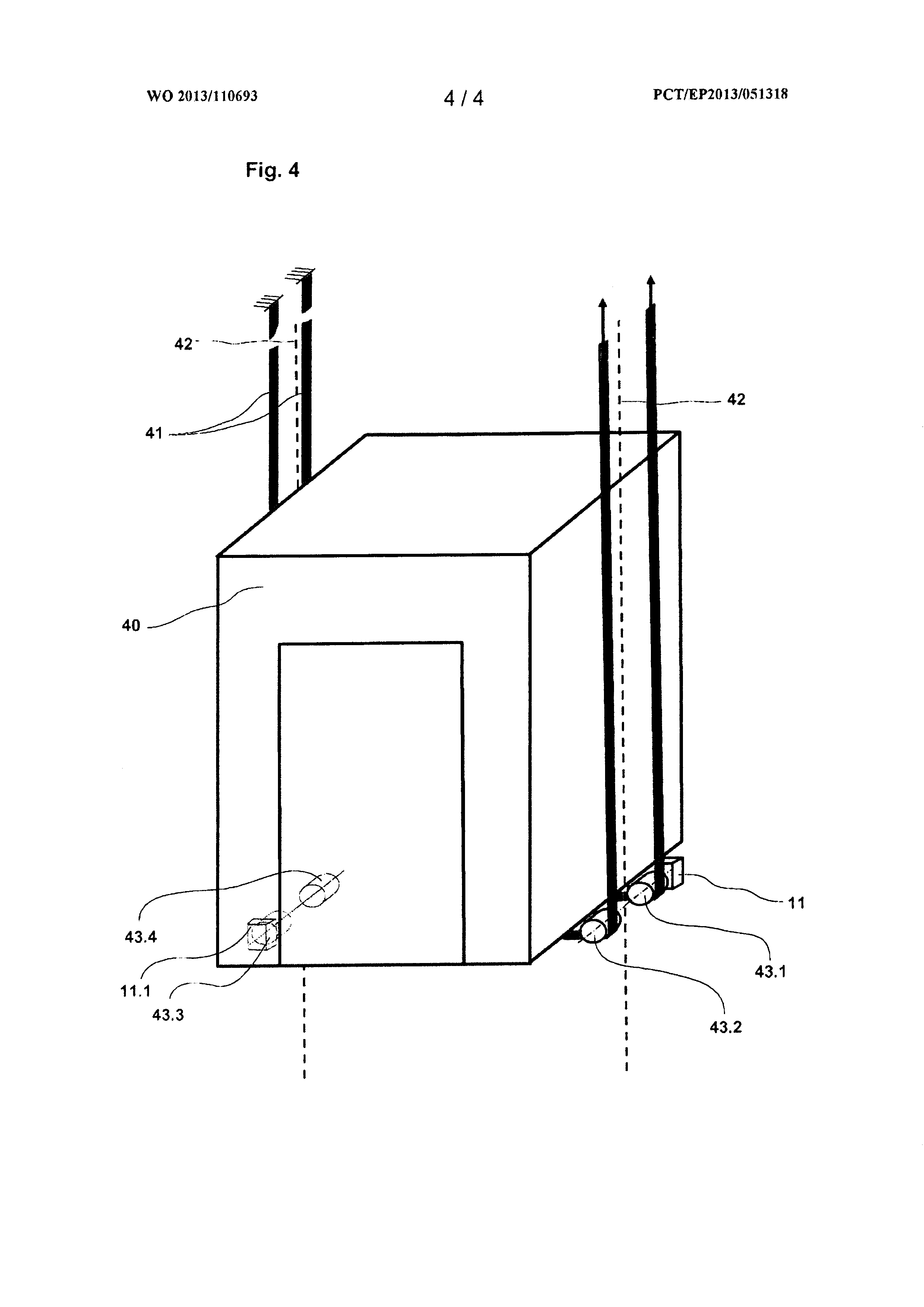
фиг. 4 - схематический вид кабины лифта с устройством безопасности.
Одновременно действующие части и функции обозначены одинаковыми обозначениями.
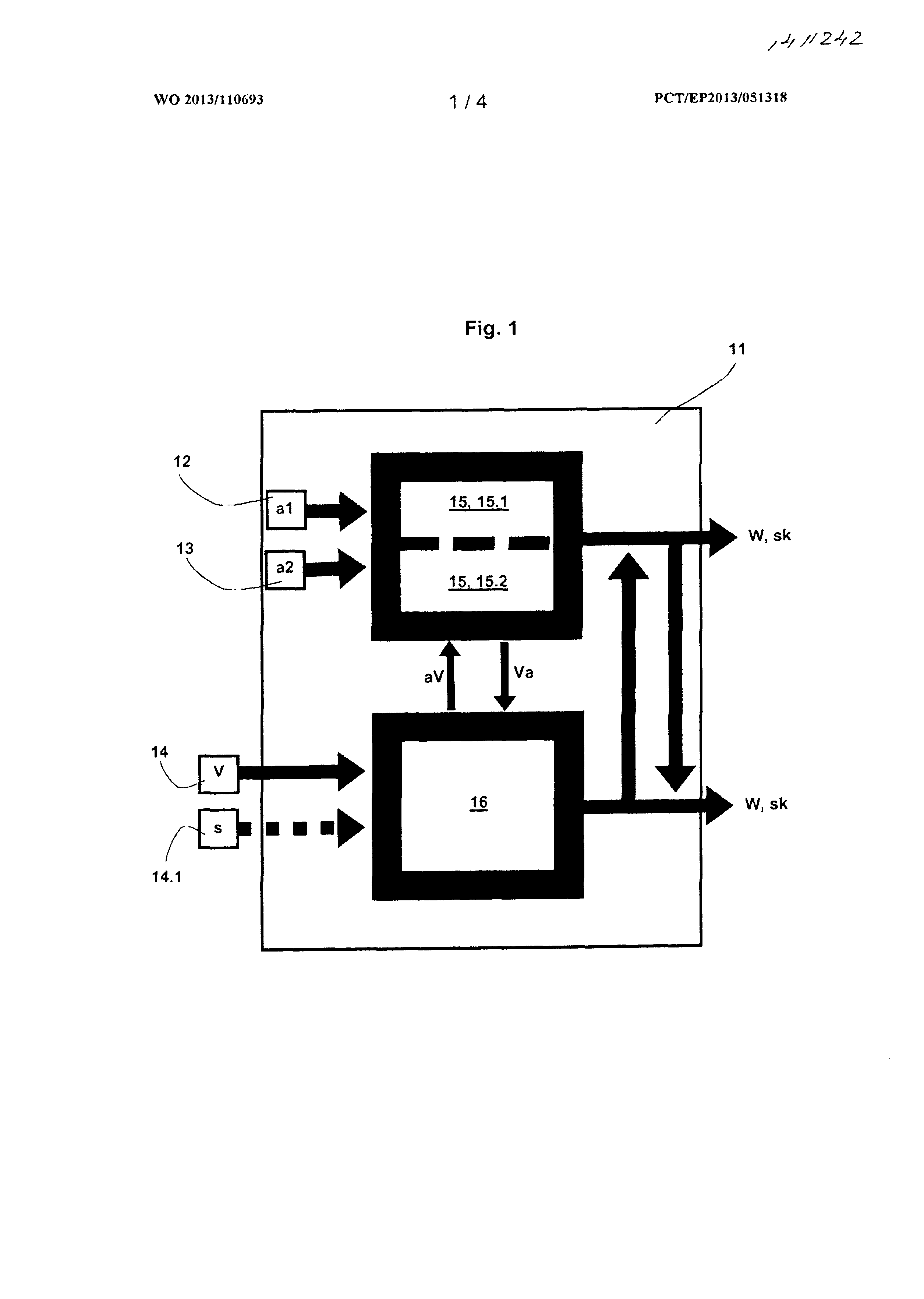
На фиг. 1 изображено электронное управляющее устройство 11 (ECU 11), которое включает датчики 12 и 13 ускорения, а также датчик 14 скорости или датчик 14.1. перемещения.
ECU 11 является частью электронной аппаратуры для электрического регулирования работающего лифта, соответственно кабины лифта. Датчики 12 и 13 ускорения встроены непосредственно в ECU 11, в то время как датчик 14 скорости или датчик 14.1 перемещения размещен вне ECU 11 и сигнал датчика скорости v или сигнал перемещения s из первого микропроцессора 16 поступает далее в ECU 11. В случае необходимости первый микропроцессор 16 рассчитывает на основе сигнала перемещения s сигнал датчика скорости v.
Во второй микропроцессор 15 поступают сигналы датчика ускорения a1 и a2 от датчиков 12 и 13 ускорения, и он проверяет их на достоверность. Одновременно второй микропроцессор 15 рассчитывает посредством интегрального исчисления скорость Va1 на основе сигналов датчиков ускорения a1 и a2 и выполняет алгоритм систематизации ошибок, чтобы распознать отказ по общей причине (Common-Cause-Fehler) датчиков ускорения a1 и a2.
Скорость Va1 поступает на первый микропроцессор, который сравнивает скорость Va1 со скоростью V и проверяет на достоверность. Кроме того, первый микропроцессор 16 вычисляет посредством дифференциального исчисления ускорение aV и передает дальше ускорение aV на второй микропроцессор 15. Второй микропроцессор 15 сравнивает теперь ускорение aV с сигналами датчика ускорения a1 и a2 на достоверность. Если на основе проверки достоверности распознан неисправный датчик, может генерироваться соответствующий сигнал предупреждения W или кабина лифта, например, после завершения цикла движения может быть остановлена.
Далее второй микропроцессор 15 и первый микропроцессор 16 сравнивают постоянно величины ускорений aV, a1 и a2, а также величины скоростей V и Va1 с заданными пороговыми величинами. Второй микропроцессор 15 сравнивает величины a1, a2 и aV с заданными пороговыми величинами, в то время как первый микропроцессор 16 сравнивает величины Va1 и V с заданными пороговыми величинами.
Если одна из величин aV, a1, a2, V или Va1 превышает заданную пороговую величину и ошибка датчика исключена, соответственно, неверный сигнал может быть безошибочно идентифицирован, выдается информация безопасности Sk на уменьшение движущего момента, соответственно для введения процесса торможения тем микропроцессором, который констатировал превышение пороговой величины.
Превышение пороговой величины ведет, как правило, к первому уровню активации для уменьшения движущего момента или к контролируемой остановке кабины лифта, в то время как пороговая величина во втором уровне активации ведет к введению в действие процесса торможения.
Во всяком случае второй микропроцессор 15 подразделяется на первый подпроцессор 15.1 и второй подпроцессор 15.2, так что оценка и сравнение в связи с датчиком 12 ускорения производится первым подпроцессором 15.1, а оценка и сравнение в связи с другим датчиком 13 ускорения производится вторым подпроцессором 15.2. Вследствие этого можно распознать возможные ошибки в области процессоров.
Преимущественно второй микропроцессор 15 обрабатывает выходную информацию датчиков по меньшей мере одного из датчиков 12, 13 ускорения, и второе электронное вычислительное устройство 16 оценивает выходную информацию датчиков, по меньшей мере одного датчика 14 скорости или датчика 14.1 перемещения.
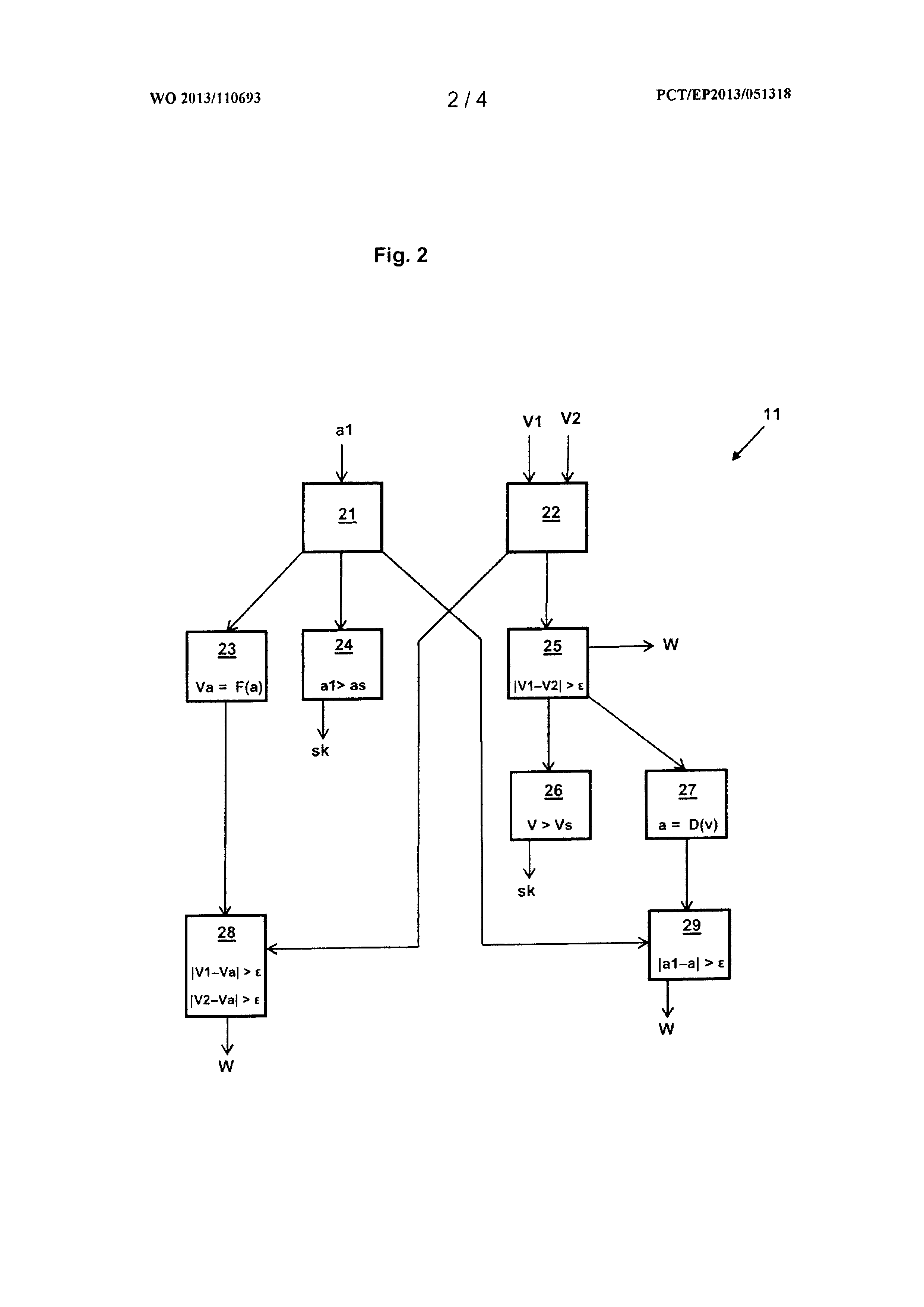
На фиг. 2 можно видеть возможный ход способа в форме структурной схемы. На этапе 21 способа вводится величина ускорения a1. Независимо от этого на этапе 22 способа вводят одновременно две величины скорости v1 и v2. На этапе 24 происходит сравнение величин ускорения a1 с заданной пороговой величиной as для ускорения. Если величина ускорения a1 превышает заданную пороговую величину as для ускорения, то выдается соответствующая информация безопасности Sk и, соответственно, уменьшается движущий момент, который вызвал ускорение, или задействуется процесс торможения. В том случае, если величина ускорения a1 не превышает заданную пороговую величину для ускорения, то на этапе 24 не происходит следующая реакция. Одновременно к этапу 24 пересчитывается посредством интегральной функции на этапе 23 величина ускорения a1 в величину скорости Va. На этапе способа 25 происходит проверка на достоверность и наличие ошибки введенных величин скорости v1 и v2. В том случае, если величины скорости v1 и v2 правдоподобны и ошибка не выявлена, процесс продолжается на этапах 26 и 27. В противном случае выдается, например, сигнал предупреждения W.
На этапе 26 производится сравнение величин скорости v1 и v2 с пороговой величиной vs для скорости. Если по меньшей мере одна из величин скорости v1 или v2 превышает заданную пороговую величину vs для скорости, то выдается соответствующая информация безопасности Sk и, соответственно, корректируется движущий момент, который приводит в движение кабину лифта, или вводится процесс торможения. В том случае, если ни одна из величин скорости v1 и v2 не превышает заданную пороговую величину для скорости, никакая последующая реакция не происходит. Одновременно на этапе 27 величины скорости v1 или v2 посредством дифференциального исчисления пересчитываются в среднее ускорение. На этапе 28 способа происходит наконец проверка на достоверность и наличие ошибки введенных с этапа 22 величин скорости v1 и v2 с величиной скорости Va, рассчитанной на этапе 23. Параллельно этому на этапе 29 проводится проверка на достоверность и наличие ошибки введенной на этапе 21 величины ускорения a1 и пересчитанной на этапе 27 величины ускорения a. В том случае, если в одном из этапов 28 или 29 распознается недостоверность или ошибка, выдается соответствующий сигнал предупреждения W и кабина лифта останавливается сразу или по завершению цикла движения.
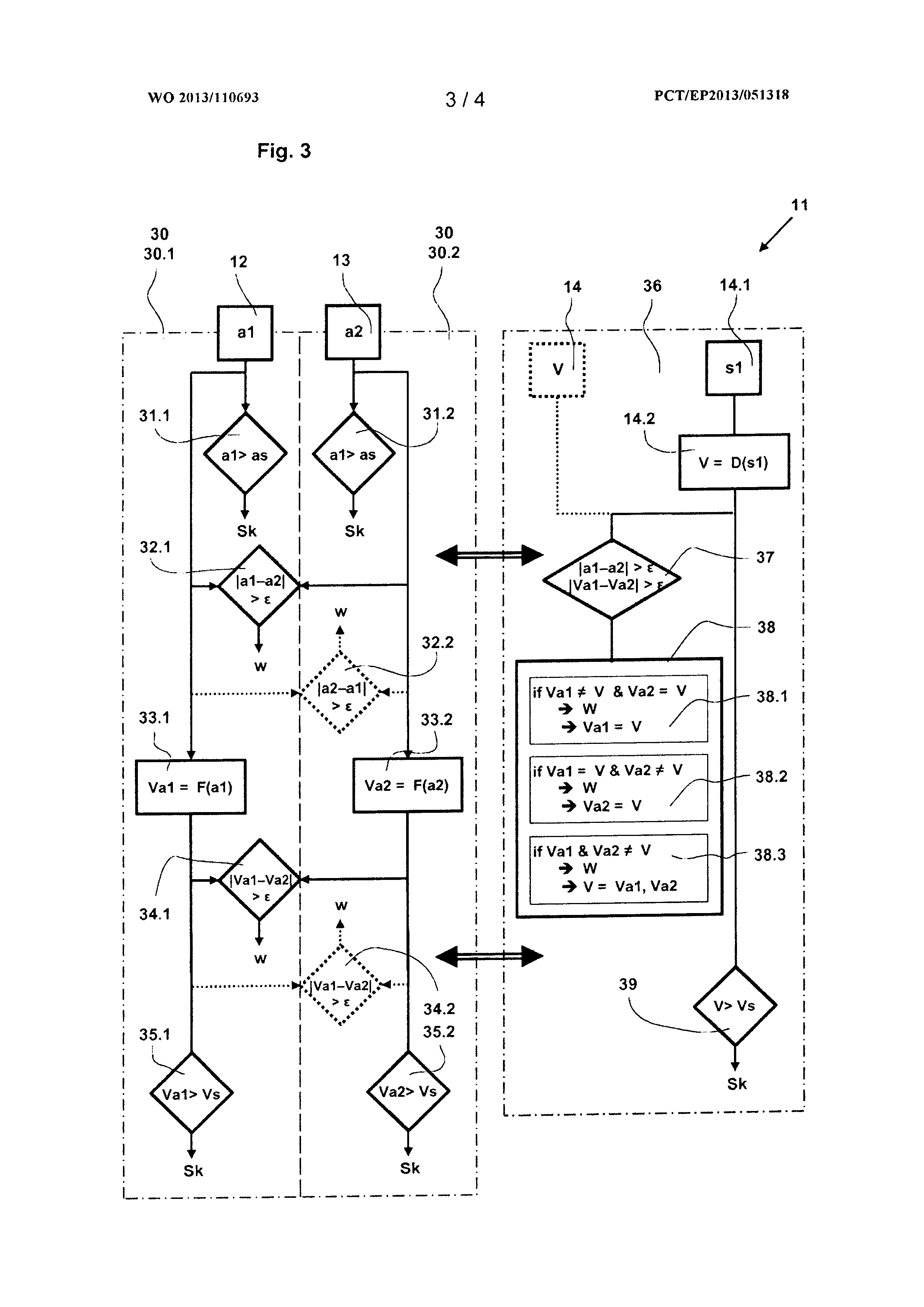
На фиг. 3 представлен альтернативный или дополнительный вариант возможного алгоритма способа. ECU 11 состоит из первого микропроцессора 30 и второго микропроцессора 36. Датчики 12 и 13 ускорения закреплены за первым микропроцессором 30 и датчик 14 скорости или датчик 14.1 перемещения закреплен за вторым микропроцессором 36.
На первом этапе 31.1, 31.2 сравниваются в первом микропроцессоре 30 сигналы датчиков ускорения a1 и a2 обоих датчиков 12 и 13 ускорения с пороговой величиной ускорения as. В том случае, если один из двух сигналов датчиков ускорения превышает пороговую величину, т.е. a1, соответственно a2>as, то выдается соответствующая информация безопасности Sk и соответственно этому корректируется движущий момент, который приводит в движение кабину лифта, или вводится процесс торможения.
На одном из следующих этапов 32.1, 32.2 происходит проверка на достоверность и наличие ошибки введенных сигналов датчиков ускорения a1 и a2. В том случае, если сигналы датчиков ускорения a1 и a2 достоверны, это означает, что разница обеих величин находится ниже величины порога ошибки, и при этом не выявлена ошибка, сигнал статуса устанавливается на окей ("все в порядке"). В противном случае выдается сигнал предупреждения W. При этом, например, потребуется сервисное обслуживание или в зависимости от дальнейшей, позднее описанной оценки дальнейшей эксплуатации лифтового устройства остановка или только эксплуатация в сокращенном режиме.
На одном из других этапов 33.1, 33.2 сигналы датчиков ускорения a1 и a2 посредством интегральной функции Va1, 2=Fa1, 2 пересчитываются в величины скорости Va1, соответственно Va2, и эти рассчитанные величины скоростей Va1 и Va2 сравниваются друг с другом на этапе 34.1, 34.2. В том случае, если разница обоих сигналов датчиков ускорения a1 и a2 находится ниже величины порога ошибки, сигнал статуса устанавливается на окей ("все в порядке"). В противном случае выдается сигнал предупреждения W. Величина порога ошибки относится конечно соответственно к подлежащим сравнению величинам: скорости, ускорению и т.д.
Далее сравниваются на одном из следующих этапов 35.1, 35.2 величины скоростей Va1 и Va2 с величиной скорости Vs. В том случае, если одна из двух величин скорости превышает величину порога скорости Vs, значит Va1, соответственно Va2>Vs, то выдается соответствующая информация безопасности Sk.
Предпочтительно первый микропроцессор 30 подразделяется на два подпроцессора 30.1 и 30.2, причем оба датчика 12 и 13 ускорения разделены на оба подпроцессора 30.1, 30.2. Оба подпроцессора могут выполнять этапы сравнения и расчета параллельно, поэтому могут распознать всевозможные ошибки процессора. Проверка достоверности и ошибок на этапах 32.1, 32.2 и 34.1, 34.2 может также проводиться взаимно избыточно в обоих подпроцессорах 30.1, 30.2 или она может быть взята на себя одним подпроцессором.
Во втором процессоре 36 вычисляется или регистрируется сигнал датчика скорости V датчика 14 скорости. Альтернативно (представлено пунктиром) величина скорости V регистрируется, например, посредством тахометра. Предпочтительно, однако, применяется датчик 14.1 перемещения, который, например, посредством дискретности перемещения регистрирует дифференциал перемещения s, из которого посредством процедуры 14.2 расчета выводится, соответственно рассчитывается, величина скорости V.
На этапе 39 проверки далее сравниваются величина скорости V с величиной порога скорости Vs. В том случае, если величина скорости V превышает величину порога скорости, т.е. V>Vs, то выдается информация безопасности Sk.
Далее на этапе 37 сравнения, с одной стороны, проверяется, поставлен ли первым микропроцессором сигнал статуса проверки достоверности и проверки ошибок шагов 32.1, 32.2, 34.1, 34.2 на окей или выдан ли сигнал предупреждения W. Далее величина скорости V сравнивается с рассчитанными первым микропроцессором 30 величинами скоростей Va1 и Va2. В том случае, если разница соответствующих рассчитанных величин скорости Va1 и Va2 для величины скорости V находится ниже величины порога ошибки, сигнал статуса устанавливается на окей ("все в порядке"). В противном случае выдается сигнал предупреждения W.
Если теперь на этапе 37 сравнения констатируется, что все без исключения сигналы статуса этапов 32.1, 32.2, 34.1, 34.2 и 37 проверки достоверности и ошибок поставлены на окей, то устройство контроля, соответственно электронное устройство 1, 1 управления эксплуатируется дальше. В противном случае запускается дальнейший анализ 38 ошибки.
Если согласно этапу 38.1 анализа 38 ошибки величины скорости Va2 и V находятся в заданном интервале допуска, Va1 и V, наоборот, вне заданного интервала допуска, то можно констатировать, что сигнал датчика ускорения a1 или относящаяся процедура вычислений ошибочны.
Если согласно этапу 38.2 величины скорости Va1 и V находятся в заданном интервале допуска, Va2 и V, наоборот, вне заданного интервала допуска, то можно констатировать, что сигнал датчика ускорения a2 или относящаяся процедура вычислений ошибочны.
Если однако согласно этапу 38.3 сигналы датчика ускорения a1 и a2 находятся в заданном интервале допуска, но величины скорости - сравнения Va2 с V и Va1 с V, наоборот, вне заданного интервала допуска, то можно констатировать, что сигнал скорости V или во всяком случае относящаяся процедура вычислений неверны.
Так можно определить целенаправленно ошибочный сигнал и обслуживающий специалист может быстро заменить дефектную деталь. В период времени эксплуатации до замены детали ошибочный сигнал может быть подавлен или временно замещен с помощью одного из двух годных сигналов.
Предпочтительный способ контроля перемещений s, s1, s2 объекта, скоростей v, v1, v2 объекта и ускорений a, a1, a2 объекта выполняется следующим образом:
1) регистрируются избыточно по меньшей мере перемещения s, s1, s2 объекта, скорости v, v1, v2 объекта или по меньшей мере ускорения a, a1, a2 объекта;
2) регистрируются избыточно перемещения s, s1, s2 объекта и просто регистрируются ускорения a, a1, a2 объекта, или скорости v, v1, v2 объекта регистрируются избыточно и ускорения a, a1, a2 объекта просто регистрируются, или ускорения a, a1, a2 объекта избыточно, а скорости v, v1, v2 объектов или перемещения s, s1, s2 объекта просто регистрируются;
3) перемещения s, s1, s2 объекта, и/или скорости v, v1, v2 объекта, и/или ускорения a, a1, a2 объекта подвергаются проверке на достоверность и ошибки;
4) перемещения s, s1, s2 объекта, или скорости v, v1, v2 объекта, или ускорения a, a1, a2 объекта распознаются как достоверные, если условие  | или
| или  или
или  выполнено, причем ε, ε1 и ε2 являются максимальными суммами допустимой разницы;
выполнено, причем ε, ε1 и ε2 являются максимальными суммами допустимой разницы;
5) проверка ошибок осуществляется посредством алгоритмов классификации ошибок, которые сравнивают между собой отношения избыточно зарегистрированных перемещений s, s1, s2 объекта, скоростей v, v1, v2 объекта или избыточно зарегистрированных ускорений a, a1 объекта или их расчетные однотипные величины;
6) посредством интегральных исчислений из ускорений a, a1, a2, скоростей v, v1, v2 объектов и/или перемещений s, s1, s2 объектов рассчитываются;
7) посредством дифференциального исчисления из перемещений s, s1, s2 объекта, скоростей v, v1, v2 объекта и/или ускорений a, a1, a2 объекта рассчитываются;
8) ускорения a, a1, a2 объектов на первом уровне активации сравниваются с пороговой величиной для ускорения и при превышении пороговой величины для ускорения производится корректировка и/или остановка движущего момента или активируется функция торможения;
9) скорости v, v1, v2 объекта на втором уровне активации сравниваются с пороговой величиной для скорости и при превышении пороговой величины для скорости производится корректировка и/или остановка движущего момента или активируется функция торможения;
10) скорости v, v1, v2 объекта на втором уровне активации рассчитываются из ускорений a, a1, a2 объекта;
11) ускорения a, a1, a2 объектов регистрируются посредством сигналов датчиков ускорения;
12) скорости v, v1, v2 объекта посредством сигналов датчиков скорости, соответственно тахогенераторов, и/или перемещения s, s1, s2 объекта посредством сигналов перемещения регистрируются от инкрементальных датчиков и от кодеров;
13) сигналы датчиков ускорения и/или сигналы датчиков скорости и/или перемещения оцениваются непосредственно без предварительной обработки и/или пересчета;
14) пороговая величина для ускорений a, a1, a2 объекта находится выше зависимого от объекта максимального ускорения и пороговая величина для скоростей v, v1, v2 объектов находится выше зависимой от объекта допустимой максимальной скорости;
15) сигналы датчика ускорения регистрируются посредством датчиков ускорения, и/или сигналы датчиков скорости регистрируются посредством датчиков скорости, и/или сигналы датчиков перемещения регистрируются посредством датчиков перемещения;
16) датчики ускорения, датчики скорости и/или датчики перемещения однократно или повторно калибруются;
17) сигналы датчиков ускорения посредством датчиков скорости проверяются на достоверность, в то время как из ускорений a, a1, a2 объекта рассчитанная скорость объекта сравнивается со скоростью, зарегистрированной посредством датчиков скорости, или со скоростью, рассчитанной посредством сигналов перемещения;
18) проводится взаимная проверка на достоверность всех имеющихся сигналов датчиков скорости или датчиков перемещения и датчиков ускорения;
19) для проверки ошибок применяются заданные интервалы допуска, причем распознаются ошибки посредством позиционирования ускорений a, a1, a2 объекта, и/или скоростей v, v1, v2 a2 объектов, и/или перемещений s, s1, s2 объектов в пределах и/или вне пределов интервалов допуска;
20) для проверки ошибок применяются заданные интервалы допуска только тогда, когда ошибочные функции для избыточных датчиков могут быть исключены.
Предпочтительное электронное устройство 11 управления для контроля скоростей v, v1, v2 объекта и ускорений a, a1, a2 объекта включает, например, первое электронное вычислительное устройство 15 или соответствующий первый процессор 30, который проводит оценку выходной информации датчиков и, в зависимости от результата оценки выходной информации датчика, вводит уменьшение движущего момента и/или остановку движущего момента и/или активацию устройства торможения, причем устройство 11 управления выполняет способ, как в приведенных примерах от 1 до 20 или комбинацию этих примеров.
Оно включает далее предпочтительно второе вычислительное устройство 16 или второй процессор 36, который или которые обмениваются информацией с первым вычислительным устройством или процессором. Предпочтительно, второе вычислительное устройство 16, соответственно второй процессор 36, аналогично ведет оценку выходной информации датчика и оно или он вводит, в зависимости от результата оценки выходной информации датчика, уменьшение движущего момента, и/или остановку движущего момента, и/или активацию устройства торможения.
Как представлено на фиг. 4, электронное устройство (ECU) 11 управления встроено в блок кабины, предпочтительно смонтировано на кабине 40 лифта, чтобы контролировать его движение. В примере кабина лифта удерживается и движется посредством средств 41 удерживания. Средства 41 удерживания подвешены жестко на одном конце, например, закреплены в конструкции здания (не представлено). С другого конца они подвижны за счет двигателя, что обозначено на фиг. 4 двойными стрелками. Средства удерживания проходят под кабиной лифта 40, причем они направляются удерживающими роликами 43.1, 43.2, 43.3, 43,4. Кабина лифта направляется посредством направляющих шин 42. На примере соответственно средство удержания размещено с обеих сторон посредством направляющих шин 42 определенной ступени управления. Благодаря этому делается возможным симметричное удерживание кабины 40 лифта. Само собой разумеется, требуемое количество средств 41 удерживания возникает из требуемой нагрузки и конструктивного исполнения системы лифта. На примере электронное устройство (ECU) 11 управления размещено на несущих роликах 43.1, это означает, что инкрементальный датчик для регистрации перемещения кабины лифта снимает показания прямо исходя из вращательного движения удерживающего ролика 43.1. ECU 11 исполнено, как пояснено в вышеуказанном примере. Так, показатели движения кабины 40 лифта могут контролироваться надежно и оптимально по стоимости. Приведение в движение удерживающих роликов обеспечивается через высокую несущую нагрузку, которая переносится посредством удерживающих роликов на кабину. Дополнительно может применяться другой ECU 11.1 или по меньшей мере отдельные избыточные датчики могут размещаться на другом, предпочтительно не на самом движущемся средстве удерживания, несущем ролике 43.3 (на фиг. 4 представлено штриховой линией).
Так безопасность может быть повышена дополнительно, поскольку, например, не натянутое, отдельное средство удерживания может привести к помехам движению на соответствующем несущем ролике, что можно определить посредством дополнительных процедур сравнения.
Эти процедуры сравнения могут быть встроены в ECU 11 или ECU 11.1 или может быть предоставлен дополнительный блок сравнения.
По меньшей мере один датчик 12, 13 ускорения предпочтительно конструктивно интегрирован в защитное ограждение управляющего устройства 11.
Распределение датчиков по различным микропроцессорам и подпроцессорам избираемо специалистом.
Устройство для глубокой вытяжки
Способ установления целевого вызова для пользования лифтовой установкой и лифтовая установка
Транспортирующее устройство
Схема возврата в исходное состояние предохранительной цепи лифта
Способ контроля лифтовой установки
Ступень эскалатора, а также эскалатор с такой ступенью
Ступень эскалатора, способ ее изготовления (варианты) и эскалатор
Движущийся поручень для эскалатора или движущегося тротуара
Портальное устройство, предназначенное для монтажа или обслуживания тяжелых частей движущегося устройства
Способ модернизации регулирования подъемника
Устройство для глубокой вытяжки
Способ установления целевого вызова для пользования лифтовой установкой и лифтовая установка
Транспортирующее устройство
Схема возврата в исходное состояние предохранительной цепи лифта
Тормозное устройство, подъемник, способ получения информации о функционировании тормозного устройства
Способ контроля лифтовой установки
Ступень эскалатора, а также эскалатор с такой ступенью
Ступень эскалатора, способ ее изготовления (варианты) и эскалатор
Движущийся поручень для эскалатора или движущегося тротуара
Портальное устройство, предназначенное для монтажа или обслуживания тяжелых частей движущегося устройства

