Результат интеллектуальной деятельности: ОРТОПЕДИЧЕСКАЯ ФИКСАЦИЯ С ИСПОЛЬЗОВАНИЕМ АНАЛИЗА ИЗОБРАЖЕНИЙ
Вид РИД
Изобретение
Перекрестная ссылка на родственные заявки
Настоящая патентная заявка испрашивает приоритет патентной заявки Великобритании № GB 1008281.6, поданной 19 мая 2010 г., содержащейся здесь в полном объеме посредством ссылки.
Уровень техники
Способы, используемые при лечении переломов костей и/или деформаций костей, могут содержать использование внешних фиксаторов, таких как фиксирующие рамы, которые хирургически устанавливаются на сегменты кости на противоположных сторонах места перелома. Снимается пара рентгеновских изображений фиксатора и сегментов кости в месте перелома. Как правило, рентгеновские изображения должны быть ортогональными или перпендикулярными относительно друг друга и выровненными с анатомическими осями пациента. Данные изображений затем обрабатываются с использованием способов ортогональной проекции для построения трехмерного представления фиксатора и сегментов костей, которое может использоваться при разработке плана лечения, который может, например, содержать выравнивание сегментов костей посредством регулировок фиксатора.
Однако возможность получения ортогональных рентгеновских изображений места перелома может быть ограничена факторами, неподконтрольными хирургу, например, маневренностью устройства формирования изображений, анатомическим местоположением перелома или деформации и/или болью, испытываемой пациентом при расположении сломанной конечности для формирования ортогональных изображений. Такие как эти ограничивающие факторы могут вносить неточности в процесс формирования изображений. Эти неточности могут иметь нежелательные последствия, такие как неправильное выравнивание сегментов кости во время лечебного процесса, ставящее под угрозу сращивание сегментов кости, необходимость дополнительных циклов формирования рентгеновских изображений для содействия коррекциям выравнивания или даже необходимость дополнительных хирургических операций.
Сущность изобретения
В соответствии с одним вариантом осуществления, способ ортопедической фиксации содержит прикрепление устройства фиксации к первому и второму сегментам кости. Способ дополнительно содержит захват первого изображения устройства фиксации и сегментов кости из первой ориентации относительно устройства фиксации. Способ дополнительно также содержит захват второго изображения устройства фиксации и сегментов кости из второй ориентации относительно устройства фиксации, которая отличается от первой ориентации. Способ дополнительно также содержит вычисление первой и второй матриц преобразования для первого и второго изображений, соответственно. Способ дополнительно также содержит использование матриц преобразования для реконструкции трехмерного представления первого и второго сегментов кости относительно устройства фиксации.
В соответствии с альтернативным вариантом осуществления, считываемый компьютером носитель данных имеет хранящиеся на нем и считываемые компьютером инструкции, которые, при их исполнении процессором, выполняют способ анализа изображений ортопедической фиксации. Способ содержит захват первого и второго изображений устройства фиксации и первого и второго сегментов кости, присоединенных к нему, посредством устройства формирования изображений. Первое изображение захватывают из первой ориентации и второе изображение захватывают из второй ориентации, отличающейся от первой ориентации. Способ дополнительно содержит получение множества параметров сцен получения изображений. Способ дополнительно также содержит реконструкцию трехмерного представления первого и второго сегментов кости относительно устройства фиксации, основываясь на множестве параметров сцен получения изображений.
Краткое описание чертежей
Предшествующее описание сущности изобретения, а также последующее подробное описание предпочтительных вариантов осуществления заявки, будут лучше поняты при чтении в сочетании с приложенными чертежами. Для целей иллюстрации способов и/или технологий ортопедической фиксации с анализом изображений на чертежах показаны предпочтительные варианты осуществления. Следует, однако, понимать, что рассматриваемая в настоящее время заявка не ограничивается конкретными компоновками и/или инструментариями, показанными на чертежах, на которых:
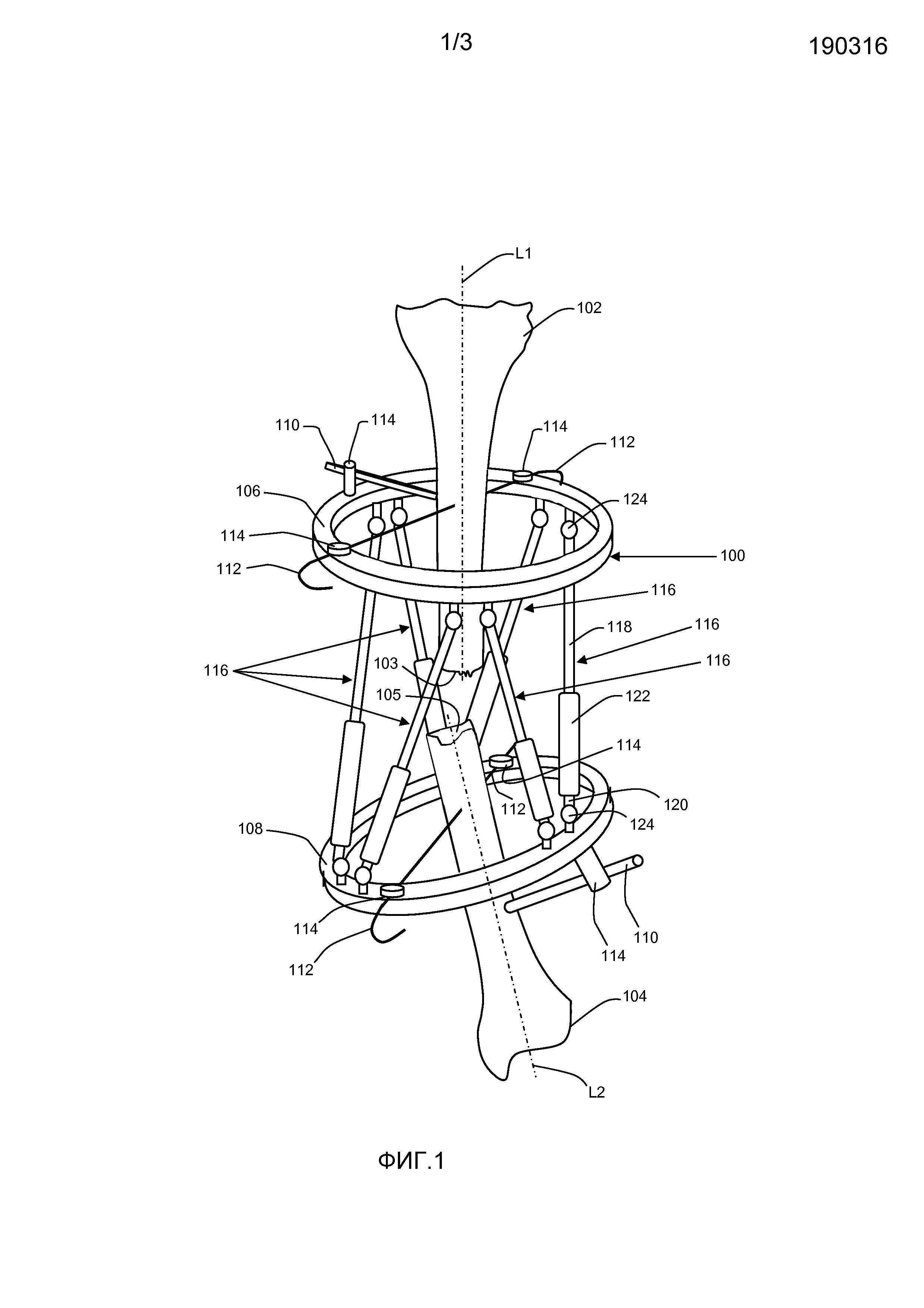
Фиг. 1 - вид в перспективе сборочного узла фиксации, расположенного для формирования изображений в соответствии с вариантом осуществления;
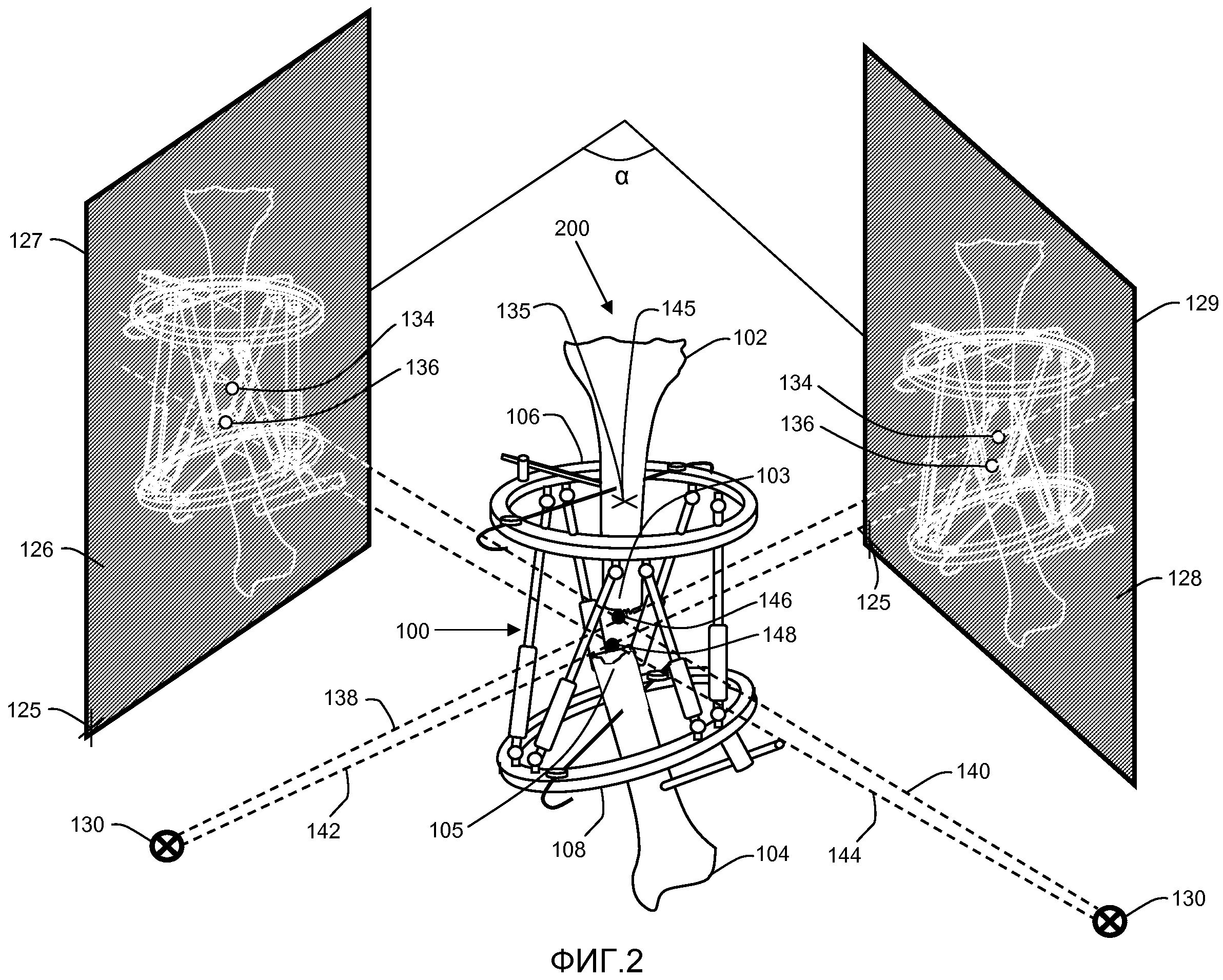
Фиг. 2 - вид в перспективе примера процесса формирования изображений посредством сборочного узла фиксации, показанного на фиг. 1; и
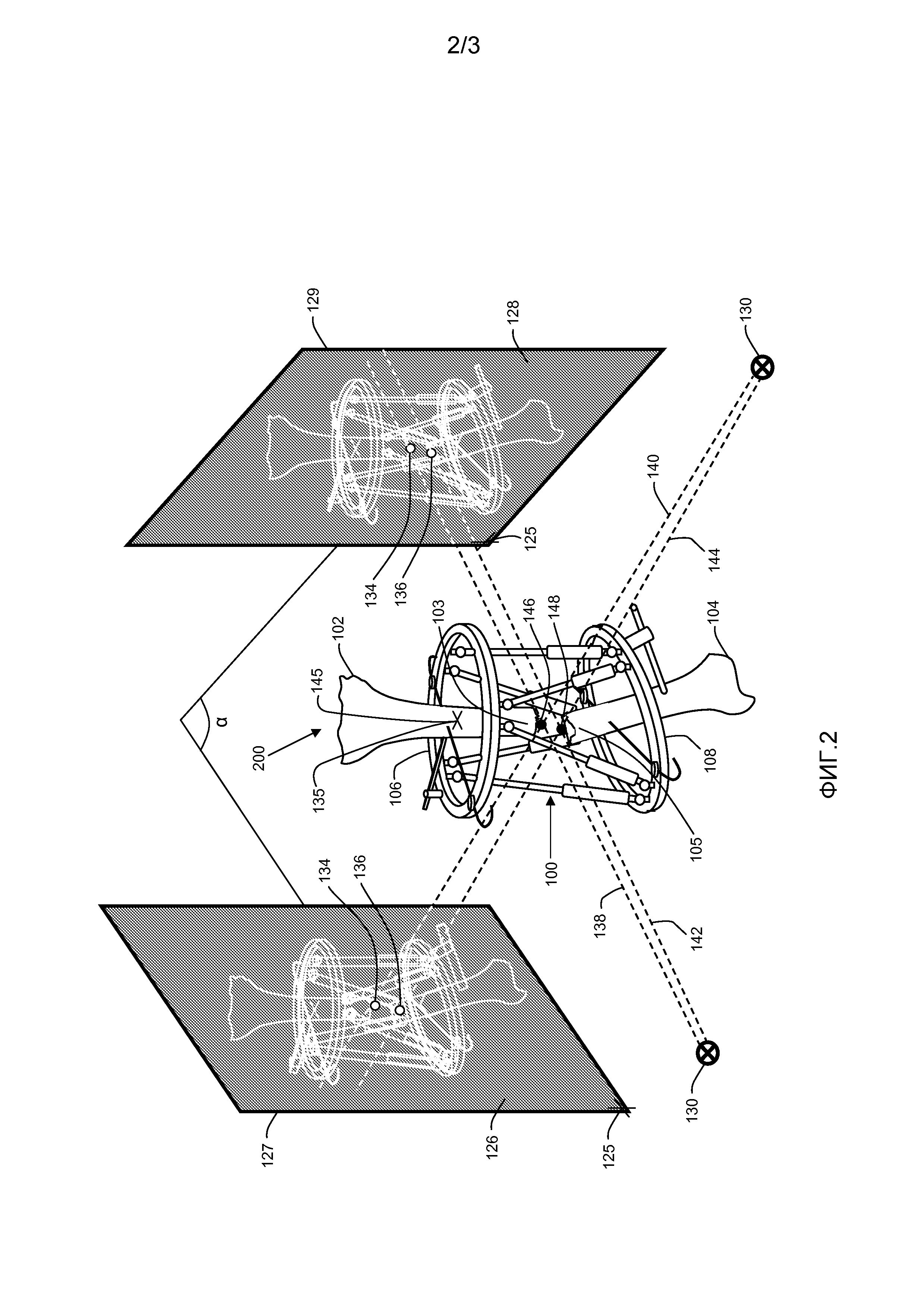
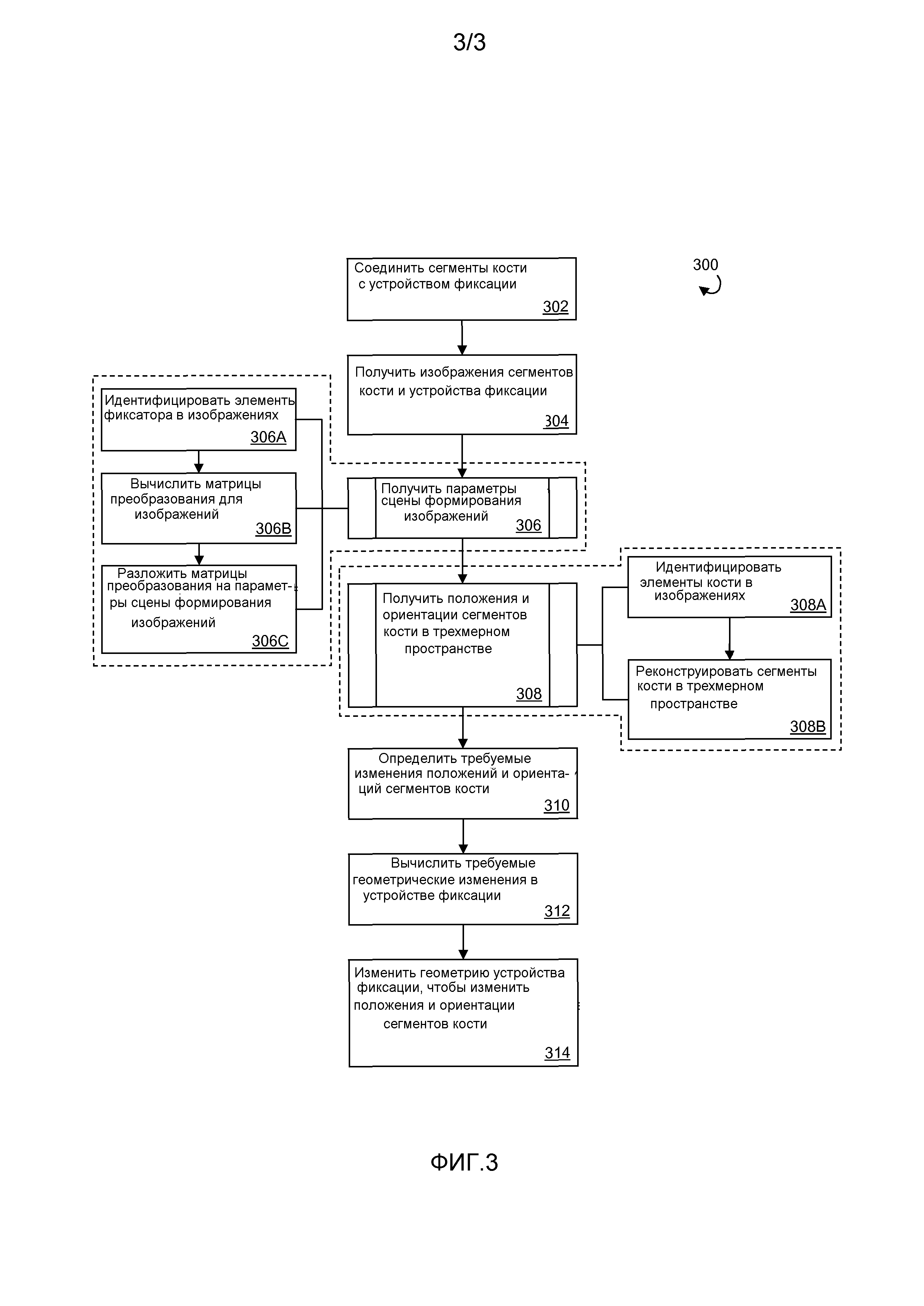
Фиг. 3 - блок-схема последовательности операций примера ортопедической фиксации с процессом анализа изображений в соответствии с вариантом осуществления.
Подробное описание
Для удобства одни и те же или эквивалентные элементы в различных вариантах осуществления, показанных на чертежах, обозначаются одними и теми же ссылочными позициями. Некоторая терминология используется в последующем описании только для удобства и не является ограничением. Слова "правый", "левый", "верхний" и "нижний" обозначают направления на чертежах, на которые делается ссылка. Слова "внутрь", "внутри", "наружу" и "снаружи" относятся к направлениям, соответственно, к геометрическому центру устройства и его определенным частям и к направлениям от них. Терминология, не предназначенная для создания ограничений, содержит перечисленные выше слова, их производные и слова подобного смысла.
Обращаясь сначала к фиг. 1, ткани тела, например, первый и второй сегменты 102, 104 кости могут выравниваться и/или ориентироваться так, чтобы стимулировать сращивание или другое заживление между тканями тела. Выравнивание и/или ориентация тканей тела могут достигаться, присоединяя ткани тела к регулируемому устройству фиксации, такому как ортопедический фиксатор 100. Ортопедический фиксатор может содержать внешнее устройство фиксации, которое содержит множество дискретных элементов фиксатора, остающихся внешними по отношению к телу пациента, но которые крепятся к соответствующим отдельным тканям тела, например, с помощью минимально инвазивных крепежных элементов. Регулируя пространственное расположение элементов фиксатора относительно друг друга, соответствующие ткани тела, прикрепленные к нему, могут переориентироваться и/или как-либо иначе выравниваться друг с другом, например, чтобы стимулировать сращивание между тканями тела во время лечебного процесса. Использование внешних ортопедических фиксаторов в комбинации с описанными здесь анализом изображений и технологиями расположения может быть предпочтительным в применениях, где непосредственное измерение и манипулирование тканями тела невозможны, когда желателен ограниченный или минимально инвазивный доступ к тканям тела и т.п.
Элементы фиксатора могут соединяться друг с другом через элементы регулировки, причем элементы регулировки выполнены с возможностью облегчения изменения пространственного расположения элементов фиксатора относительно друг друга. Например, в показанном на чертеже варианте осуществления, ортопедический фиксатор 100 содержит пару элементов фиксатора в форме верхнего кольца 106 фиксатора и нижнего кольца 108 фиксатора. Кольца 106, 108 фиксатора могут быть сконструированы одинаково или по-разному. Например, кольца 106, 108 фиксатора могут иметь диаметры, которые одинаковы или различаются. Точно также, кольца 106, 108 фиксатора могут быть сконструированы с переменными диаметрами поперечного сечения, толщиной и т. д. Следует понимать, что элементы фиксатора для ортопедического фиксатора 100 не ограничиваются показанными на чертежах верхним и нижним кольцами 106, 108 фиксатора и что ортопедический фиксатор 100 может иметь альтернативную конструкцию. Например, могут быть обеспечены дополнительные кольца фиксатора и они могут быть соединены с кольцом 106 и/или 108 фиксатора. Дополнительно, следует понимать, что конфигурации элементов фиксатора не ограничиваются кольцами, и что по меньшей мере один, такой как приводится выше, элемент фиксатора, может быть сконструирован альтернативно, используя любую другую приемлемую геометрию.
Первый и второй сегменты 102, 104 кости могут жестко крепиться к верхнему и нижнему кольцам 106, 108 фиксатора, соответственно, с помощью крепежных элементов, которые могут устанавливаться на кольцах 106, 108 фиксатора. Например, в показанном варианте осуществления крепежные элементы обеспечиваются в форме крепежных стержней 110 и крепежных проволок 112.
Стержни 110 и проволоки 112 проходят между проксимальными концами, прикрепленными к установочным элементам 114, которые устанавливаются на кольцах 106, 108 фиксатора, и противоположными дистальными концами, которые вставляются в сегменты 102, 104 кости или как-либо иначе крепятся к сегментам 102, 104 кости. Установочные элементы 114 могут съемно устанавливаться на кольца 106, 108 фиксатора в заданных точках вдоль длины окружности колец 106, 108 фиксатора, например, вставляя их в резьбовые отверстия, определяемые кольцами фиксатора. Для каждого кольца 106, 108 фиксатора, установочные элементы 114 могут устанавливаться на верхней поверхности кольца, нижней поверхности кольца или при любой их комбинации. Следует заметить, что крепежные элементы не ограничиваются конфигурацией показанного варианта осуществления. Например, для крепления сегментов кости к соответствующим элементам фиксатора в соответствии с требованиями может использоваться любое количество крепежных элементов, таких как показанные на чертежах стержни 110 и проволоки 112 и любые другие. Дополнительно следует понимать, что один или больше крепежных элементов, например, стержни 110 и/или проволоки 112, могут альтернативно быть выполнены с возможностью установки непосредственно на кольца 106, 108 фиксатора, не используя установочных элементов 114.
Верхнее и нижнее кольца 106, 108 фиксатора могут соединяться друг с другом по меньшей мере одним из множества элементов регулировки. По меньшей мере один, такой как приводится выше, элемент регулировки может быть выполнен с возможностью регулировки пространственного расположения колец фиксатора относительно друг друга. Например, в показанном варианте осуществления, верхнее и нижнее кольца 106, 108 фиксатора соединяются друг с другом множеством элементов регулировки, обеспечиваемых в форме регулируемых по длине стоек 116. Следует понимать, что конструкция ортопедического фиксатора 100 не ограничивается шестью стойками 116, как на показанном варианте осуществления, и что по мере необходимости может использоваться больше или меньше стоек.
Каждая из регулируемых по длине стоек 116 может содержать противоположно направленные верхний и нижний фрагменты 118, 120 стойки. Каждый из верхних и нижних фрагментов 118, 120 стойки имеют проксимальные концы, помещенные в соединительный элемент, или втулку 122 и противоположные дистальные концы, соединяемые с универсальными шарнирами 124, установленными на верхнем и нижнем кольцах 106, 108 фиксатора, соответственно. Универсальные шарниры в показанном варианте осуществления располагаются парами, равномерно пространственно разнесенными по длине окружности верхнего и нижнего колец 106, 108 фиксатора, но может быть альтернативно размещены в любых других местах на кольцах фиксатора, по мере необходимости.
Проксимальные концы верхних и нижних фрагментов 118, 120 стоек для каждой стойки 116 могут иметь на них резьбу, выполненную с возможностью ее приема дополняющей резьбой втулки 122, так что когда проксимальные концы верхнего и нижнего фрагментов 118, 120 стойки 116 приняты в соответствующей втулке 122, вращение втулки 122 заставляет верхний и нижний фрагменты 118, 120 стойки двигаться поступательно внутри втулки 122, заставляя, таким образом, стойку 116 удлиняться или укорачиваться, в зависимости от направления вращения. Таким образом, длина каждой стойки 116 может независимо регулироваться относительно остальных стоек. Следует понимать, что элементы регулировки не ограничиваются регулируемыми по длине стойками 116, как на показанном варианте осуществления, и что элементы регулировки могут конструироваться альтернативно, в зависимости от необходимости, используя, например, одну или более альтернативных конфигураций, альтернативные механизмы регулировки длины и т.п.
Регулируемые по длине стойки 116 и универсальные шарниры 124, посредством которых они устанавливаются на верхнем и нижнем кольцах 106, 108 фиксатора, позволяют ортопедическому фиксатору 100 функционировать подобно платформе Стюарта и, более конкретно, подобно кольцевой системе остеогенеза с вытяжением, гексаподу или пространственной раме Тейлора. То есть, регулируя длину стоек 116, можно изменять пространственное расположение верхнего и нижнего колец 106, 108 фиксатора и, таким образом, сегментов 102, 104 кости. Например, в показанном на чертеже варианте осуществления первый сегмент 102 кости присоединен к верхнему кольцу 106 фиксатора, а второй сегмент 104 кости присоединен к нижнему кольцу 108 фиксатора. Следует понимать, что крепление первого и второго сегментов 102, 104 кости к верхнему и нижнему кольцам 106, 108 фиксатора не ограничивается показанным на чертеже вариантом осуществления (например, когда центральные продольные оси L1, L2 первого и второго сегментов 102, 104 кости, по существу, перпендикулярны соответствующим плоскостям верхнего и нижнего колец 106, 108 фиксатора), и что хирург имеет полную свободу при выравнивании первого и второго сегментов 102, 104 кости внутри верхнего и нижнего колец 106, 108 фиксатора во время конфигурирования ортопедического фиксатора 100.
Изменяя длину одной или более стоек 116, может быть изменено расположение верхнего и нижнего колец 106, 108 фиксатора и, таким образом, сегментов 102, и 104 кости относительно друг друга, так чтобы их соответствующие продольные оси L1, L2 существенно выравнивались друг с другом и так, чтобы их соответствующие сломанные концы 103, 105 (кости) подгонялись друг к другу, стимулируя сращивание во время лечебного процесса. Следует понимать, что регулировка стоек 116 не ограничивается регулировкой длины, как описано здесь, и что стойки 116 могут регулироваться и по-другому, по мере необходимости. Дополнительно, следует понимать, что регулировка положений элементов фиксатора не ограничивается регулировкой стоек 116 с регулируемой длиной и что расположение элементов фиксатора относительно друг друга может регулироваться альтернативным способом, например, в соответствии с типом и/или количеством элементов регулировки, соединенных с устройством фиксации.
Изменение положения элементов фиксатора ортопедического устройства фиксации, такого как ортопедический фиксатор 100, может использоваться для корректировки неправильного положения при угловом искривлении, продольном движении, вращении или любой их комбинации внутри тканей тела. Устройство фиксации, такое как ортопедический фиксатор 100, используемое с помощью описанных здесь технологий, может корректировать множество таких дефектов неправильного положения индивидуально или одновременно. Однако, следует понимать, что устройство фиксации не ограничивается показанным на чертежах ортопедическим фиксатором 100 и что устройство фиксации может быть альтернативно сконструировано в соответствии с необходимостью. Например, устройство фиксации может содержать дополнительные элементы фиксации, может содержать элементы фиксации, имеющие альтернативные конфигурации, может содержать больше или меньше элементов регулировки, может содержать альтернативно сконструированные элементы регулировки или любую их комбинацию.
На фиг. 2-3 показан пример ортопедической фиксации с процессом анализа изображений или способ, соответствующий варианту осуществления. Этапы выполнения примера ортопедической фиксации со способом 300 анализа изображений показаны на блок-схеме последовательности операций на фиг. 3. На этапе 302 ткани тела, такие как первый и второй сегменты 102, 104 кости могут соединяться с регулируемым устройством фиксации, таким как ортопедический фиксатор 100, как описано выше.
На этапе 304, с помощью ортопедического фиксатора 100, закрепленного на сегментах 102, 104 кости, по меньшей мере одно из множества изображений фиксатора 100 и сегментов 102, 104 кости может быть снято. Изображения могут быть захвачены, используя одни и те же или различные способы формирования изображений. Например, изображения могут быть получены, используя рентгенографию, компьютерную томографию, магнитно-резонансную томографию, ультразвук, формирование инфракрасных изображений, фотографию, рентгеноскопию, визуальное спектроскопическое формирование изображений или любую их комбинацию.
Изображения могут быть захвачены из любого положения и/или ориентации относительно друг друга и относительно фиксатора 100 и сегментов 102, 104 кости. Другими словами, не существует требования, чтобы захваченные изображения были бы ортогональны относительно друг друга или выровнены с анатомическими осями пациента, предоставляя, таким образом, хирургу почти полную свободу действий при расположении устройств 130 формирования изображений. Предпочтительно, изображения 126, 128 захватывают из различных направлений или ориентаций, так чтобы изображения не накладывались. Например, в показанном на чертеже варианте осуществления плоскости изображений пары изображений 126, 128 не перпендикулярны относительно друг друга. Другими словами, угол α между плоскостями изображения изображений 126, 128 не равен 90 градусов, так что изображения 126, 128 являются неортогональными относительно друг друга. Предпочтительно, снимают по меньшей мере два изображения, хотя захват дополнительных изображений может увеличить точность способа.
Изображения 126, 128 могут быть захвачены, используя один или более источников формирования изображений или устройств формирования изображений, например рентгеновских устройств 130 формирования изображений и/или соответствующих устройств 127, 129 формирования изображений. Изображения 126, 128 могут быть рентгеновскими изображениями, захваченными одиночным перемещаемым рентгеновским устройством 130 формирования изображений, или могут быть захвачены раздельно расположенными устройствами 130 формирования изображений. Предпочтительно, положение устройств 127, 129 захвата изображений и/или устройств 130 формирования изображений относительно пространственного начала 135 координат трехмерного пространства, описанных ниже более подробно, известны. Положение устройств 130 формирования изображений может устанавливаться вручную и/или ориентироваться под управлением хирурга, устанавливаться автоматически, например, программируемым устройством формирования изображений или любой их комбинацией.
На этапе 306 получают параметры сцены формирования изображений, имеющие отношение к фиксатору 100, сегментам 102, 104 кости, устройству(-ам) 130 формирования изображений и устройствам 127, 129 захвата изображений. Параметры сцены формирования изображений могут использоваться при построении трехмерного представления расположения сегментов 102, 104 кости в фиксаторе 100, как описывается ниже более подробно. Один или больше параметров сцены формирования изображений могут быть известны. Параметры сцены формирования изображений, которые не известны, могут быть получены, например, математически сравнивая местоположения представлений элементов фиксатора в двумерном пространстве рентгеновских изображений 126, 128 с трехмерными местами расположения этих элементов на геометрии фиксатора 100. В предпочтительном варианте осуществления параметры сцены формирования изображений могут быть вычислены, используя точечное отверстие или перспективные модели камеры. Например, параметры сцены формирования изображений могут быть определены численно, используя матричную алгебру, как описано ниже более подробно.
Параметры сцены формирования изображений могут, в частности, содержать масштабные коэффициенты пикселей изображения, соотношение размеров пикселей изображения, коэффициент скоса датчика изображения, размер изображения, фокусное расстояние, положение и ориентацию источника формирования изображений, положение главной точки (определяемой как точка на плоскости соответствующего изображения 126, 128, которая является самой близкой к соответствующему устройству 130 формирования изображений), положения и ориентации элементов фиксатора 100, положение и ориентацию соответствующего устройства приема изображений и положение и ориентацию объектива источника формирования изображений.
В предпочтительном варианте осуществления по меньшей мере некоторые, как например, все параметры сцены формирования изображений могут быть получены, сравнивая места представлений конкретных компонентов или элементов фиксатора из фиксатора 100 в пределах двумерных пространств изображений 126, 128 с соответствующими местами представления тех же самых элементов фиксатора в реальном трехмерном пространстве. Элементы фиксатора содержат компоненты ортопедического фиксатора 100 и предпочтительно являются компонентами, которые можно легко идентифицировать в изображениях 126, 128. Точки, линии, конические сечения и т.п. или любая их комбинация могут использоваться для описания соответствующих конфигураций элементов фиксатора. Например, представления элементов фиксатора, используемые при сравнении, могут содержать осевые линии одной или больше регулируемых по длине стоек 116, центральные точки универсальных шарниров 124, центральные точки установочных элементов 114 и т.п.
Элементы фиксатора могут дополнительно содержать элементы маркера, которые отличаются от описанных выше компонентов фиксатора 100. Элементы маркера могут использоваться при сравнении в качестве дополнения или вместо использования компонентов фиксатора 100. Элементы маркера могут устанавливаться в конкретных местах компонентов фиксатора 100 перед формированием изображений, могут заделываться внутрь компонентов фиксатора 100, или использоваться в любой их комбинации. Элементы маркера могут быть выполнены для улучшенной различимости в изображениях 126, 128 при сравнении с различимостью других компонентов фиксатора 100. Например, элементы маркера могут быть созданы из различных материалов, таких как радионепрозрачный материал, или могут быть созданы с конфигурациями, которые легко отличают их от других компонентов фиксатора 100 в изображениях 126, 128. В варианте осуществления в качестве примера элементы маркера могут иметь назначенные конфигурации, которые соответствуют их соответствующим местам на фиксаторе 100.
На этапе 306A элементы фиксатора могут быть идентифицированы для использования при сравнении. Идентификация элементов фиксатора и определение их соответствующих местоположений могут быть выполнены хирургом, с помощью программного обеспечения или в любой их комбинации.
Местоположения элементов фиксатора в двумерном пространстве изображений 126, 128 определяются относительно локальных начал 125 координат, определенных в плоскостях формирования изображений 126, 128. Локальные начала 125 координат служат "нулевыми точками" для определения местоположений элементов фиксатора в изображениях 126, 128. Местоположения элементов фиксатора могут быть определены их соответствующим координатами x и y относительно соответствующего локального начала 125 координат. Местоположение локального начала 125 координат в пределах соответствующего изображения может быть произвольным, пока оно находится в плоскости изображения. Как правило, начало координат располагается в центре изображения или в углу изображения, таком как нижний левый угол. Следует понимать, что местоположения локальных начал координат не ограничиваются показанными локальными началами 125 координат и что локальные начала 125 координат могут альтернативно определяться в любых других местах. Дополнительно, следует понимать, что местоположения локальных начал 125 координат могут определяться хирургом, с помощью программного обеспечения или любой их комбинацией.
На этапе 306B соответствующая матрица Р преобразования может быть вычислена для каждого из изображений 126, 128. Матрицы преобразования могут быть использованы для отображения координат местоположения карты одного или более соответствующих элементов фиксатора в реальном трехмерном пространстве в соответствующие координаты местоположения элемента(-ов) фиксатора в двумерном пространстве соответствующего изображения 126, 128. Следует понимать, что один и тот же элемент(-ы) фиксации не должен использоваться при сравнении двух изображений 126, 128. Например, элемент фиксатора, используемый при построении матрицы преобразования, связанной с изображением 126, может быть тем же самым или отличающимся от элемента фиксатора, используемого при построении матрицы преобразования, связанной с изображением 128. Дополнительно, следует понимать, что увеличение количества элементов фиксатора, используемых при вычислениях матриц преобразования, может увеличить точность способа. Эту операцию представляет следующее уравнение:
 (1)
(1)
Символы x и y представляют координаты местоположения относительно локального начала 125 координат точки элемента фиксатора в двумерном пространстве изображений 126, 128. Символы X, Y и Z представляют соответствующие координаты местоположения относительно пространственного начала 135 координат точки элемента фиксатора в реальном трехмерном пространстве. В показанном на чертеже варианте осуществления точка, соответствующая центру плоскости, определяемой верхней поверхностью верхнего кольца 106 фиксатора, определяется как пространственное начало 135 координат. Показанная матрица P может иметь по меньшей мере четыре элемента по ширине и три элемента по высоте. В предпочтительном варианте осуществления элементы матрицы P могут быть вычислены, решая следующее матричное уравнение:
А · p=B (2)
Вектор p может содержать одиннадцать элементов, представляющих значения матрицы P. Нижеследующие уравнения представляют размещения элементов в векторе p и матрице P:
p=[p1 p2 p3 p4 p5 p6 p7 p8 p9 p10 p11]T (3)
 (4)
(4)
В предпочтительном варианте осуществления для двенадцатого элемента p12 матрицы P может быть установлено численное значение единица. Матрицы A и B могут быть собраны, используя двумерную и трехмерную информацию элементов фиксатора. Для каждой точки, представляющей соответствующий элемент фиксатора, могут быть созданы две строки матриц A и B. Следующее уравнение представляет значения двух строк, добавленных к матрицам A и B для каждой точки элемента фиксатора (например, центральная точка соответствующего универсального шарнира 124):
 (5)
(5)
Символы X, Y и Z представляют значения локальных координат точки элемента фиксатора в реальном трехмерном пространстве относительно пространственного начала 135 координат, а символы x и y представляют значения локальных координат местоположения, соответствующих точке элемента фиксатора в двумерном пространстве соответствующего изображения 126, 128 относительно локального начала 125 координат.
Для каждой линии, представляющей соответствующий элемент фиксатора, могут быть созданы две строки матриц A и B. Нижеследующее уравнение представляет значения двух строк, добавленных к матрицам A и B для каждой линии элемента фиксатора (например, осевая линия соответствующей регулируемой по длине стойки 116):
 (6)
(6)
Символы X, Y и Z представляют значения координат местоположения точки, принадлежащей линии элемента фиксатора в реальном трехмерном пространстве относительно пространственного начала 135 координат. Символы dX, dY и dZ представляют значения градиента линии в реальном трехмерном пространстве. Символы a, b и c представляют константы, определяющие линию в двумерном пространстве соответствующего изображения 126, 128. Например, a, b и c могут быть вычислены, используя две точки, принадлежащие линии на соответствующем изображении 126, 128. В предпочтительном варианте осуществления значение b принимается равным 1, если линия не является вертикальной линией, когда значение b равно нулю. Корреляция постоянных a, b и c с соответствующими координатами x и y изображения представляется следующим уравнением:
а · x+b · y+c=0 (7)
Уравнение (2) может быть дополнительно ограниченным использованием шести или более элементов фиксатора, например, регулируемых по длине стоек 116. Следует понимать, что нет необходимости для всех элементов фиксатора быть видимыми в одном из изображений 126, 128, чтобы получить матрицу P. Дополнительно следует понимать, что, если один или более из описанных выше параметров сцены формирования изображений известны, известные параметры могут использоваться, чтобы уменьшить минимальное количество элементов фиксаторов, требующихся для ограничения уравнения (2). Например, такая информация может быть получена от современных систем формирования изображений в заголовках изображения DICOM. Предпочтительно, разложение по особым значениям или способ наименьших квадратов могут использоваться, чтобы решить уравнение (2) для значений вектора p.
На этапе 306C, матрицы преобразования могут разлагаться на параметры сцены формирования изображений. Следующее уравнение может использоваться для связи матрицы P с матрицами E и I:
P=I · E (8)
Следует понимать, что, анализируя матрицу P, могут вводиться дополнительные условия. Например, способ, представленный Tsai, описанный в статье "A Versatile Camera Calibration Technique for High- Accuracy 3D Machine Vision Metrology Using of-the-shelf TV Cameras and Lenses", IEEE Journal of Robotics & Automation, RA-3, No. 4, 323-344, август 1987, которая полностью содержится здесь посредством ссылки, может использоваться для коррекции изображений 126, 128 при радиальном искривлении.
Матрицы E и I содержат параметры сцены формирования изображений. Следующее уравнение представляет композицию матрицы I:
 (9)
(9)
Символы sx и sy представляют значения масштабных коэффициентов координат изображения (например, пиксельные масштабные коэффициенты). Символ f, представляющий фокусное расстояние, соответствует значению самого короткого расстояния между соответствующим источником 130 формирования изображений и плоскостью соответствующего изображения 126, 128. Символы tx и ty представляют координаты основной точки относительно локального начала 125 координат соответствующего изображения 126, 128. Следующее уравнение представляет композицию матрицы E:
 (10)
(10)
Символы ox, oy и oz представляют значения положения фиксатора 100 в реальном трехмерном пространстве. Символы r1-r9 описывают ориентацию фиксатора 100. Эти значения могут быть собраны в трехмерную вращательную матрицу R, представленную следующим уравнением:
 (11)
(11)
Способы Trucco и Verri, описанные в статье "Introductory Techniques of 3-D Computer Vision", Prentice Hall, 1998, or the method of Hartley, как описано в "Euclidian Reconstruction from Uncalibrated Views", Applications of Invariance in Computer Vision, pages 237-256, Springer Verlag, Berlin Heidelberg, 1994, которые содержатся здесь во всей их полноте, могут использоваться для получения значений E и/или I. Используя результирующие значения матриц E и I, может быть реконструирована полная сцена трехмерного изображения фиксатора 100 и сегментов 102, 104 кости.
Например, на фиг. 2 представлен пример сцены получения трехмерного изображения, реконструированного из рентгеновских изображений 126, 128. В показанном варианте осуществления рентгеновское излучение обеспечивается рентгеновскими устройствами 130 формирования изображений. Следует понимать, что рентгеновские устройства 130 формирования изображений могут быть такими же или другими устройствами формирования изображений, которые описаны выше. Рентгеновские лучи, излучаемые устройствами 130 формирования изображений, принимаются соответствующими устройствами формирования изображений, захватывая, таким образом, изображения 126, 128. Предпочтительно, расположение устройств 130 формирования изображений относительно локальных начал 125 координат известно.
На этапе 308 изображения 126, 128 и параметры сцены формирования изображений могут использоваться, чтобы получить положения и/или ориентации сегментов 102, 104 кости в трехмерном пространстве. Полученные данные положения и/или ориентации могут использоваться для разработки плана лечения пациента, например, изменение ориентации и/или положения сломанных первого и второго сегментов 102, 104 кости, чтобы стимулировать сращивание между сегментами 102, 104 кости, как описано ниже более подробно. Следует понимать, что способы и технологии ортопедической фиксации с анализом изображений, описанные здесь, не ограничиваются применением к изменению положения сломанных костей и что ортопедическая фиксация с анализом изображений может использоваться в любом другом типе процедуры фиксации, по мере необходимости, например, для удлинения костей, исправления анатомических дефектов и т.п.
На этапе 308A элементы кости, содержащие представления конкретных участков (например, анатомические признаки) сегментов 102, 104 кости, могут быть идентифицированы и их местоположения в пределах изображений 126, 128 могут быть определены. Предпочтительно, местоположения элементов кости определяются относительно соответствующих локальных начал 125 координат изображений 126, 128. Идентификация элементов кости и определение их соответствующих местоположений могут выполняться хирургом, с помощью программного обеспечения или в любой их комбинации.
Элементы кости могут использоваться при построении трехмерного представления положения и/или ориентации сегментов 102, 104 кости. Предпочтительно, элементы кости легко идентифицировать в изображениях 126, 128. Точки, линии, конические сечения и т. п. или любая их комбинация могут использоваться для описания соответствующих конфигураций элементов кости. Например, в показанном на чертеже варианте осуществления, точки 134 и 136, представляющие сломанные концы 103, 105 сегментов 102, 104 кости, соответственно, идентифицируются как элементы кости в изображениях 126, 128.
Элементы кости могут дополнительно содержать элементы маркера, которые имплантируются в сегменты 102, 104 кости до формирования изображений. Элементы маркера могут использоваться в качестве дополнения или вместо описанных выше элементов кости, идентифицированных в изображениях 124, 126. Элементы маркера могут быть выполнены с возможностью улучшенной различимости в изображениях 126, 128, при сравнении с различимостью анатомических признаков сегментов 102, 104 кости. Например, элементы маркера могут быть созданы из непрозрачного для рентгеновского излучения материала или могут быть созданы с легко различимыми конфигурациями.
На этапе 308B трехмерное представление 200 сегментов 102, 104 кости может быть реконструировано. Трехмерное представление может быть создано с соответствующим представлением фиксатора 100 или без него. В показанном варианте осуществления пары линий излучения, таких как линии 138, 140 и 142, 144 излучения могут быть созданы для точек элементов 134, 136 кости, соответственно. Каждая линия излучения соединяет элемент кости в одном из изображений 126, 128 с соответствующим устройством 130 формирования изображений. Каждая пара линий излучения может быть проанализирована для общей точки пересечения, такой как точки 146, 148. Общие точки 146, 148 пересечения представляют соответствующие положения точек элементов 134, 136 кости в трехмерном представлении сегментов 102, 104 кости. Конечно, может быть построено больше, чем пара линий лучей, а именно, множество, например, если захвачены больше, чем два изображения. Если линии луча конкретного набора не пересекаются, точка, ближайшая ко всем линиям лучей в наборе, может использоваться в качестве общей точки пересечения.
Положения и/или ориентации сегментов 102, 104 кости могут быть определены количественно или измерены, используя общие точки пересечения, например, точки 146, 148. Например, линии, представляющие осевые линии сегментов 102, 104 кости могут быть созданы и могут сравниваться с анатомическими осями пациента. Дополнительно, расстояния между сломанными концами 103, 105 сегментов 102, 104 кости могут быть определены количественно. Используя эти или подобные способы, могут быть определены положения и/или ориентации сегментов 102, 104 кости.
На этапе 310 трехмерное представление 200 может использоваться для определения требующихся изменений в положениях и/или ориентациях сегментов 102, 104 кости, например, как положение сегментов 102, 104 кости может быть изменено относительно друг друга, чтобы стимулировать сращивание между сегментами 102, 104 кости. Например, в показанном варианте осуществления, может потребоваться изменить угловое искривление второго сегмента 104 кости так, чтобы оси L1 и L2 были выровнены, и изменить положение второго сегмента кости так, чтобы сломанные концы 103, 105 сегментов 102, 104 кости упирались друг в друга. Предпочтительно, определение требуемых изменений в положениях и/или ориентациях сегментов 102, 104 кости делается хирургом. В варианте осуществления в качестве примера, линии, представляющие продольные оси L1, L2 первого и второго сегментов 102, 104 кости, могут создаваться в трехмерном представлении, чтобы помочь при определении, какие требуются изменения в положениях и/или ориентациях сегментов 102, 104 кости. При определении требуемых изменений в положениях и/или ориентациях сегментов кости, хирургу может помочь программное обеспечение, такое как компьютерная программа, выполненная с возможностью определения требуемых положений и/или ориентации сегментов 102, 104 кости. Предпочтительно, требуемые изменения в положениях и/или ориентациях сегментов 102, 104 кости определяются относительно пространственного начала 135 координат.
Когда требуемые изменения в положениях и/или ориентациях сегментов 102, 104 кости были определены, может быть определен план лечения для осуществления изменений положения и/или ориентации. В предпочтительном варианте осуществления требуемые изменения в положениях и/или ориентациях сегментов 102, 104 кости могут производиться постепенно, путем ряда более мелких изменений. Положения и/или ориентации сегментов 102, 104 кости могут изменяться, изменяя положения и/или ориентации верхнего и нижнего колец 106, 108 фиксатора относительно друг друга, например, удлиняя или укорачивая регулируемые по длине стойки 116.
На этапе 312 требуемые изменения в геометрии фиксатора 100 (то есть, положение и/или ориентация фиксатора 100), которые могут позволить требуемые изменения в положениях и/или ориентациях сегментов 102, 104 кости, могут быть вычислены, используя матричную алгебру, описанную выше. Например, требуемые изменения положения и/или переориентации второго сегмента 104 кости относительно первого сегмента 102 кости могут быть преобразованы в изменения положения и/или ориентации нижнего кольца 108 фиксатора относительно верхнего кольца 106 фиксатора. Требуемые изменения в геометрии фиксатора могут быть выражены относительно начала 145 координат фиксатора, определенного для ортопедического фиксатора 100. Следует понимать, что начало 145 координат фиксатора не должно совпадать с пространственным началом 135 координат, как видно на показанном варианте осуществления.
На этапе 314 может быть осуществлен план лечения, согласно которому положения и/или ориентации сегментов 102, 104 кости могут изменяться, изменяя геометрию фиксатора 100.
Как описано выше, один или более этапов способа, описанного здесь и показанного на фиг. 3, может выполняться компьютерной программой, программным обеспечением, встроенными программами или другой формой считываемых компьютером инструкций, помещенных на считываемый компьютером носитель данных для выполнения компьютером или процессором. Примеры считываемых компьютером носителей данных могут содержать считываемые компьютером носители данных и считываемые компьютером носители связи. Примерами считываемых компьютером носителей данных являются, в частности, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), регистр, кэш-память, полупроводниковые устройства памяти, магнитные носители, такие как встроенные жесткие диски и съемные диски, магнитооптические носители и оптические носители, такие как диски CD-ROM и цифровые универсальные диски (DVD). Примеры считываемых компьютером носителей связи содержат, в частности, электронные сигналы, передаваемые по проводным или беспроводным соединениям.
Следует понимать, что ортопедическая фиксация с использованием описанной здесь технологии анализа изображений предусматривает не только использование неортогональных изображений, но позволяет также использование перекрывающихся изображений, изображений, захваченных с использованием различных способов формирования изображений, изображений, захваченных при различных настройках и т.п., предоставляя, таким образом, хирургу большую свободу действий по сравнению с существующими способами фиксации и формирования изображений.
Дополнительно следует понимать, что способы и технологии, описанные здесь в отношении ортопедической фиксации, могут также использоваться для других применений. Например, устройство механической манипуляции с возможностью изменения положения, такое как параллельный манипулятор, платформа Стюарта и т.п., может иметь присоединенные к нему первый и второй объекты. Устройство манипуляции может быть построено из множества компонентов. Первый и второй объекты могут быть любыми объектами, положение которых и/или выравнивание которых относительно друг друга должны изменяться. Этапы, подобные этапам способа 300 ортопедической фиксации с анализом изображений, могут применяться для реконструкции трехмерного представления первого и второго объектов относительно устройства манипуляции с возможностью изменения положения. Трехмерное представление первого и второго объектов может быть реконструировано и использоваться для определения одного или более изменений геометрии устройства манипулирования, которые, когда осуществляются, могут изменять расположение первого и второго объектов относительно друг друга. Трехмерное представление может реконструироваться, используя соответствующие первое и второе множества параметров сцены формирования изображений, определение местоположения по меньшей мере одного из объектов в первом изображении и определение местоположения элемента по меньшей мере одного из объектов во втором изображении.
Хотя способы ортопедической фиксации с анализом изображений были описаны здесь со ссылкой на предпочтительные варианты осуществления и/или на предпочтительные способы, следует понимать, что слова, которые были здесь использованы, являются словами описания и иллюстрации, а не словами ограничения, и что объем здесь на соположения относительно друг друга должны меняться рассматриваемого раскрытия не предназначен для ограничения этими подробностями, а скорее предназначен распространяться на все структуры, способы и/или применения описанного здесь способа ортопедической фиксации с анализом изображений. Специалисты в данной области техники, пользующиеся преимуществом принципов настоящего описания, могут внести многочисленные изменения в способ ортопедической фиксации с анализом изображений, описанный здесь, и изменения могут выполняться, не отступая от объема и сущности рассматриваемого раскрытия, например, как приводится в приложенной формуле изобретения.
Межпозвонковая вставка и сцепленная с ней пластина в сборе
Способ и аппарат для нанесения клеящего герметика
Устройство "роботизированная рука"
Увеличиваемый вертельный бедренный штифт
Система для задней фиксации позвоночника пластиной
Устройство и способ нормализации показаний измерения механического напряжения в имплантате для оценки динамики заживления костной ткани
Пленки и способы производства
Система для фиксации костей
Костный имплантат
Неровность, вырезанная на кромке отверстия
Межпозвонковая вставка и сцепленная с ней пластина в сборе
Способ и аппарат для нанесения клеящего герметика
Устройство "роботизированная рука"
Увеличиваемый вертельный бедренный штифт
Система для задней фиксации позвоночника пластиной
Устройство и способ нормализации показаний измерения механического напряжения в имплантате для оценки динамики заживления костной ткани
Пленки и способы производства
Система для фиксации костей
Костный имплантат

