Результат интеллектуальной деятельности: СПОСОБ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМЫМ БОЕПРИПАСАМ
Вид РИД
Изобретение
Изобретение относится к области противодействия оптико-электронным средствам, входящим в состав вооружения различного назначения.
Наиболее близким по технической сущности и достигаемому результату является способ (прототип) оптико-электронного противодействия (см., например, Добрынин В.Д., Куприянов А.И., Пономарев В.Г., Шустов Л.Н. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем. - М.: ЗАО «Издательское предприятие «Вузовская книга», 2007, стр. 254-256), основанный на обнаружении оптического излучения функционирования составных элементов управляемого боеприпаса (УБП), определении пеленгационными каналами угловых координат УБП по оптическому излучению функционирования его составных элементов УБП и его сопровождении, ориентации передающего оптического канала в направлении УБП, постановке помех оптико-электронному координатору (ОЭК) УБП или его поражении оптическим излучением.
Основным недостатком способа является отсутствие информации о структуре и характеристиках функционирования ОЭК УБП. Это обуславливает снижение вероятности срыва атаки УБП воздействием на его элементную базу средствами оптико-электронного противодействия (СОЭП). Например, если ОЭК использует для оценки направления на цель вращающийся растровый диск, то поражающее излучение будет фокусироваться на фотоэлементе приемника только в момент времени появления открытой части растра. Это приводит к неоправданной потере мощности поражающего лазерного излучения в фокусной плоскости и соответственно уменьшает дальность срыва атаки УБП путем вывода из работоспособного состояния наиболее уязвимого элемента ОЭК-фотоприемника. Компенсирование потерь повышением мощности лазерного излучения способно привести к увеличению массогабаритных параметров питающего и передающего блоков СОЭП, что в условиях его размещения на летальном аппарате может быть не возможно.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности радиоэлектронного поражения оптико-электронных средств, входящих в состав высокоточного оружия.
Технический результат достигается тем, что в известном способе противодействия УБП, основанном на обнаружении оптического излучения УБП, определении угловых координат УБП и его сопровождении, ориентации передающего оптического канала в направлении УБП, излучают зондирующий оптический сигнал в направлении УБП, принимают отраженный от ОЭК УБП сигнал и измеряют его пространственные, частотные и временные параметры, по которым определяют дальность и скорость полета ОЭК УБП, уточняют угловые координаты ОЭК УБП и их разброс, а также определяют временные параметры открытия фотоприемника ОЭК УБП открытыми участками вращающегося растрового диска, в зависимости от их значений и энергетических параметров передающего оптического канала делят расстояние до ОЭК УБП относительно передающего оптического канала на три зоны: дальняя, средняя и ближняя, меняют величину угловой расходимости передающего оптического канала в зависимости от местонахождения ОЭК УБП, величины разброса его угловых координат и погрешности наведения передающего оптического канала в текущий момент времени и излучают оптическое излучения в моменты времени открытия фотоприемника ОЭК УБП открытыми участками вращающегося растрового диска с параметрами для: дальней зоны - модулирующей помехи, средней зоны - ослепляющей помехи, ближней зоны - поражающей помехи, контролируют величину промаха УБП по траектории его полета.
Способ противодействия УБП базируется на поэтапном воздействии оптического сигнала на ОЭК УБП в зависимости от координат его местоположения, их разброса и временных промежутков энергетической доступности фоточувствительной площадки его приемника. При этом радиоэлектронное поражение ОЭК УБП включает как создание помех (оптико-электронное подавление), так и функциональное поражение лазерным излучением. Предварительно осуществляют по сопровождающему оптическому излучению составных элементов (корпуса ракеты, двигателя) обнаружение и пеленгацию УБП. Далее производят локацию ОЭК УБП оптическим сигналом в интересах формирования базы данных о структуре и характеристиках функционирования ОЭК УБП и его пространственном местоположении и ориентации относительно ОЭСП. Для этого производят измерение временных, частотных и пространственных параметров отраженного сигнала, по которым оценивают дальность до ОЭК УБП, его угловые координаты и их разброс, временные характеристики вращения растрового диска. Согласование полей зрения ОЭК УБП и приемопередающего канала ОЭСП в зависимости их взаимного местоположения и скорости сближения с учетом ошибок пеленгации и целеуказания осуществляют управлением углом расходимости лазерного излучения. А также формируют относительно ОЭСП три зоны воздействия оптического сигнала на фотоприемник ОЭК УБП: дальняя, средняя и ближняя. В дальней зоне осуществляют постановку модулирующей помехи, т.е. передают оптические сигналы с параметрами внесения ошибок в измеренные значения угловой скорости визирования ОЭК УБП. В средней зоне осуществляют постановку ослепляющей помехи, т.е. передают оптические сигналы с параметрами, снижающими чувствительность ОЭК УБП (засветки) (см., например, Бобнев М.П., Казаков В.Д., Николенко Н.Ф. и др. Основы теории радиоэлектронной борьбы. М.: Воениздат, 1987, стр. 309-312). В ближней зоне осуществляют поражение ОЭК поражающей помехой, т.е. передают оптические сигналы, выводящие ОЭК УБП из работоспособного состояния (изменяющие структуру фоточувствительного элемента фотоприемника). При этом передачу оптических сигналов осуществляют в моменты времени открытия фотоприемника ОЭК УБП открытыми участками вращающегося растрового диска. Контроль величины промаха осуществляют по изменению траектории полета УБП.
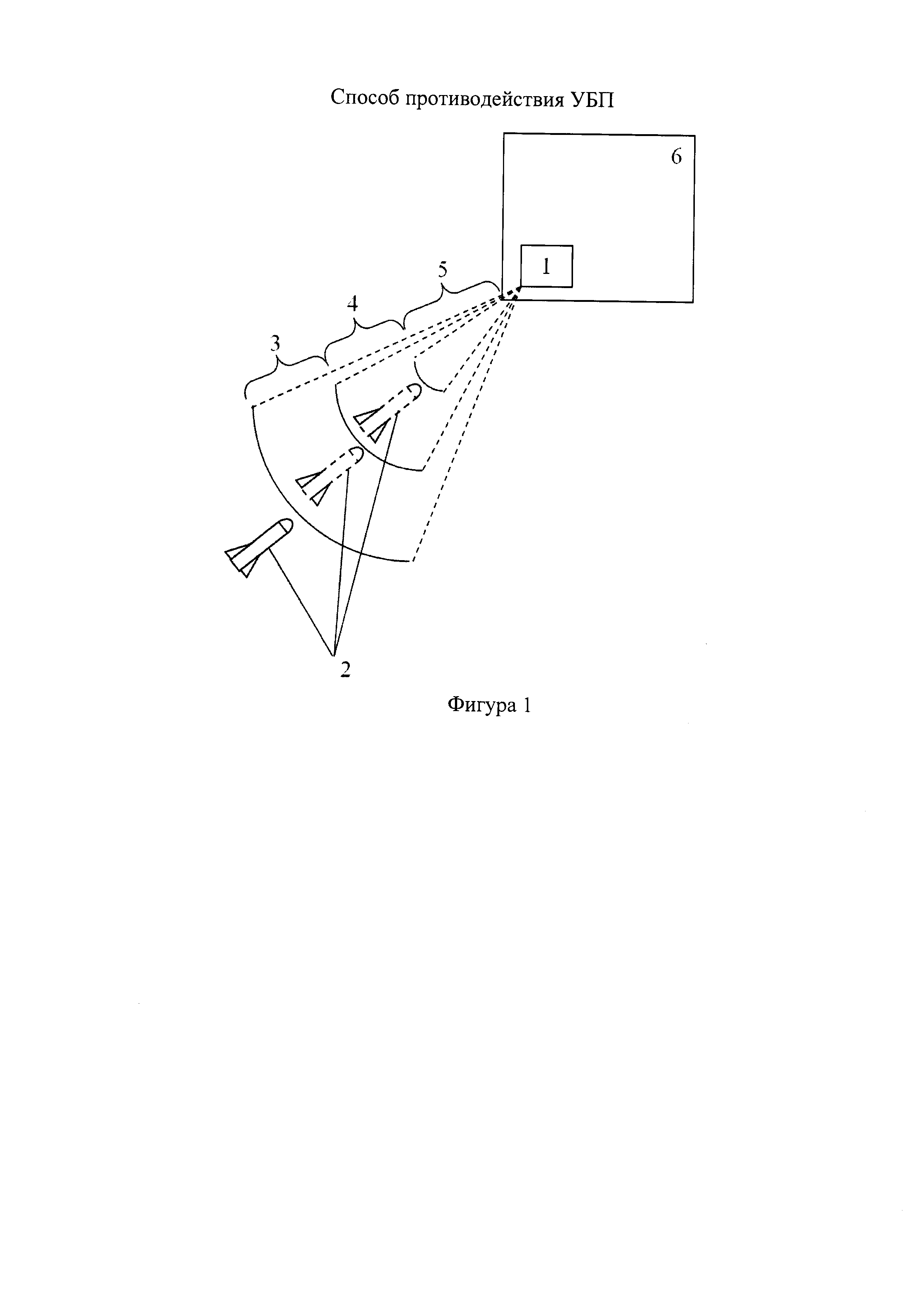
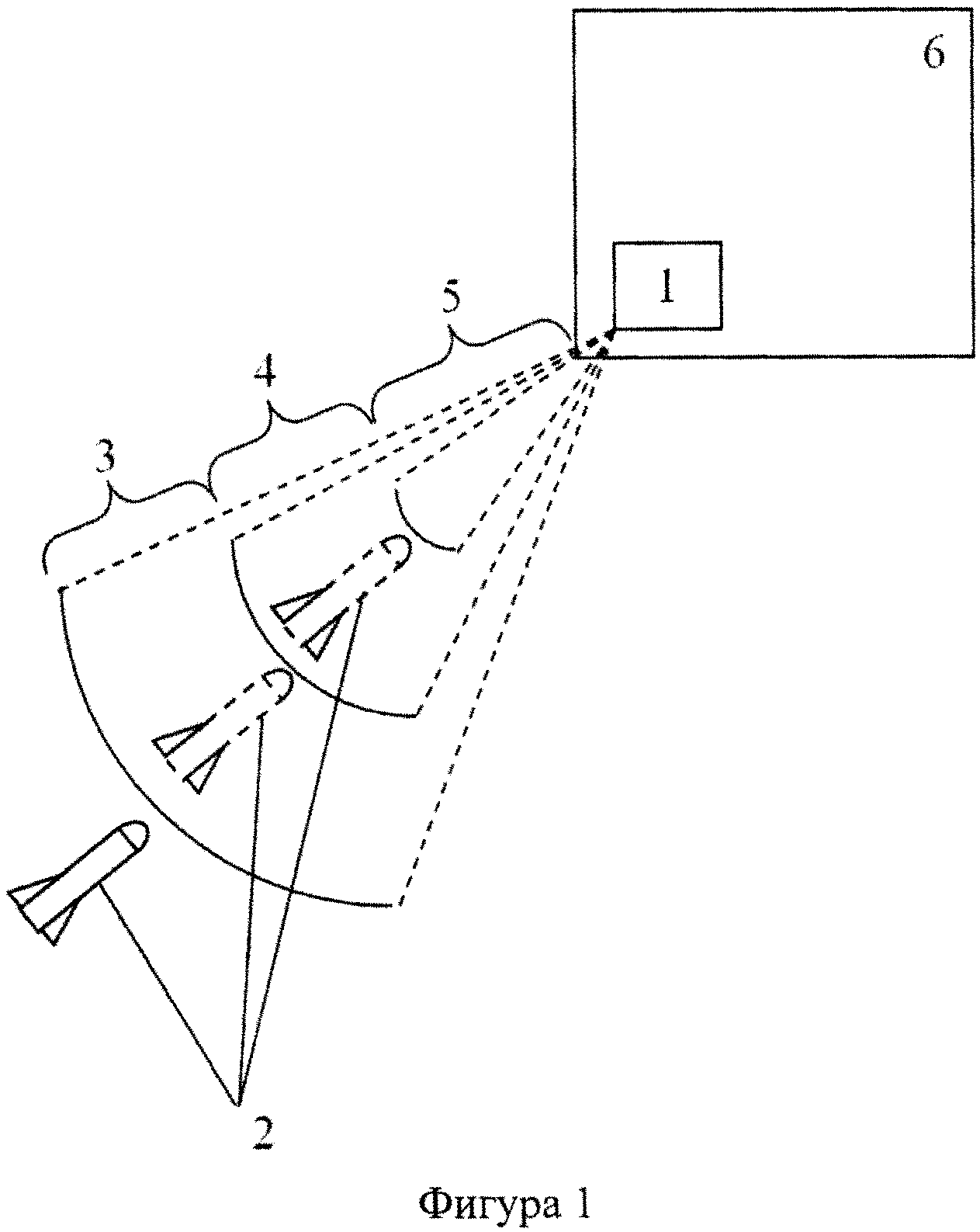
Заявленный способ поясняется схемой, представленной на фигуре 1. На фигуре приняты следующие обозначения: 1 - ОЭСП; 2 - УБП с ОЭК; 3 - дальняя зона; 4 - средняя зона; 5 - ближняя зона; 6 - носитель ОЭСП.
Противодействие УБП в соответствии с данным способом осуществляется следующим образом. Предварительно ОЭСП 1 осуществляет по сопровождающему полет оптическому излучению составных элементов (корпуса ракеты, двигателя) обнаружение и пеленгацию УБП 2. ОЭСП 1 ориентирует свой передающий канал в направлении полета УБП 2 и производит локацию оптическим сигналом его ОЭК 2. ОЭСП 1 принимает отраженный от ОЭК 2 сигнал и измеряет его энергетические, временные, частотные и пространственные параметры (время прихода зондирующего импульса, время задержки между излученным и принимаемым импульсами, период и длительность импульса, спектр, амплитуду, направление прихода сигнала и др.). На основе значений измеряемых параметров ОЭСП 1 формируют управляющие сигналы по изменению угла расходимости лазерного излучения и формированию его параметров. Угол расходимости лазерного излучения устанавливается в зависимости от взаимного местоположения ОЭК УБП 2 и приемопередающего канала ОЭСП 1 с учетом ошибок пеленгации и целеуказания (погрешности наведения). А также ОЭСП 1 формирует три зоны воздействия оптического сигнала на фотоприемник ОЭК УБП 2: дальнюю 3, среднюю 4 и ближнюю 5. В дальней зоне ОЭСП 1 осуществляет постановку модулирующих оптических помех. ОЭК УБП 2 принимает помеховый сигнал и обрабатывает его. В случае эффективного воздействия помехового сигнала в ОЭК 1 возникают ошибки наведения и УБП 2 изменяет траекторию полета. Величину промаха контролирует ОЭСП 1. Если УБП 2 продолжает полет в направлении носителя 6 и попадает в среднюю зону 4, то ОЭСП 1 осуществляет энергетическое подавление ОЭК 2 с целью снижения его чувствительности. Величину промаха также контролирует ОЭСП 1. Если и в этом случае срыва наведения не произошло, УБП 2 продолжает полет в направлении носителя 6 и попадает в ближнюю зону 5, то ОЭСП 1 осуществляет поражение ОЭК, т.е. производит разрушение структуры фоточувствительной поверхности его фотоприемника лазерным излучением. При этом передача оптических сигналов на всех этапах полета УБП 2 ОЭСП 1 осуществляет в моменты времени открытия фотоприемника ОЭК 2 открытыми участками вращающегося растрового диска.
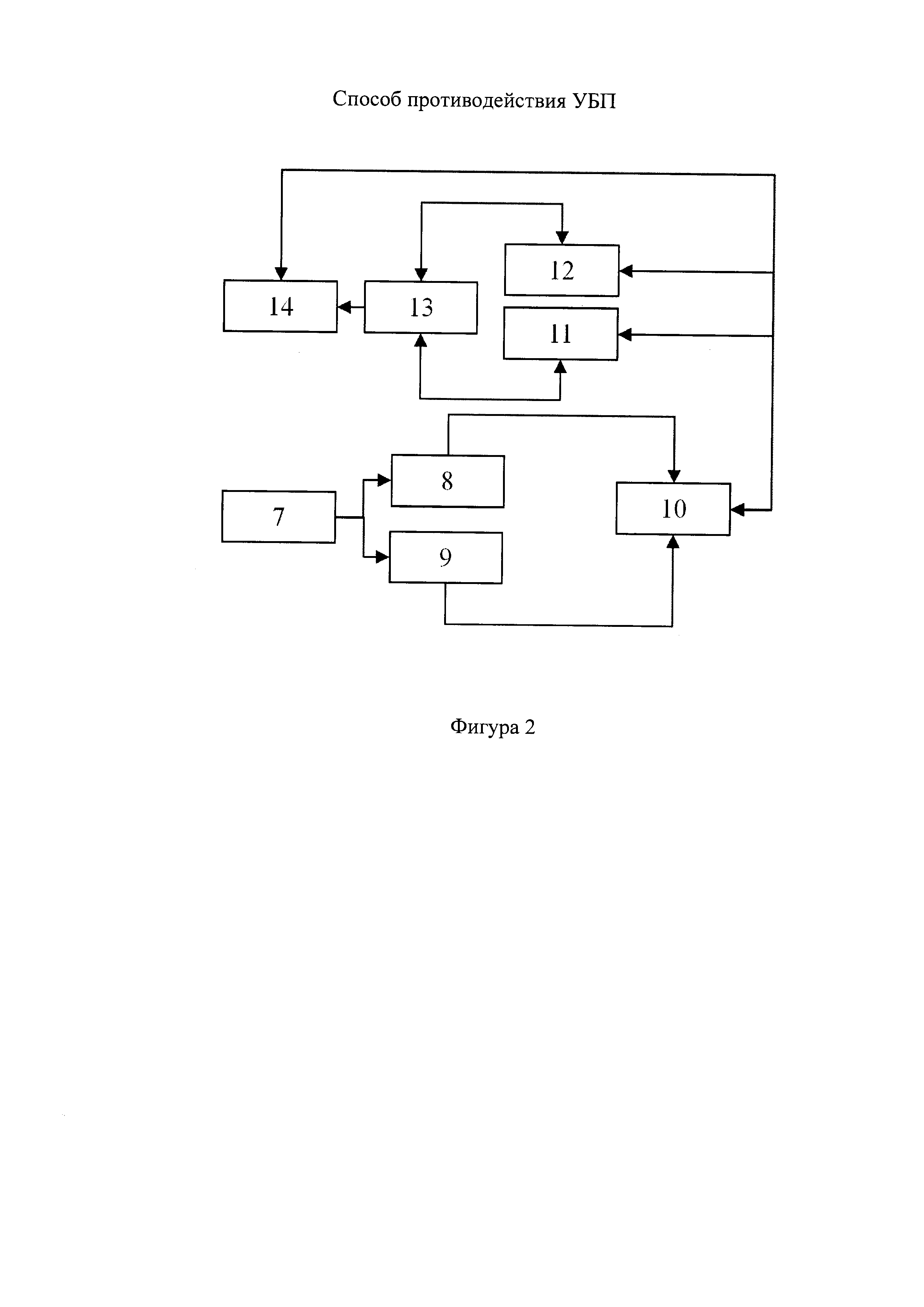
На фигуре 2 представлена блок-схема устройства, с помощью которого может быть реализован способ. Блок-схема устройства содержит блоки формирующей оптики и наведения приемного и передающего каналов 7 и 14, блок пеленгационных приемных устройств 8, приемное устройство зондирующих сигналов с элементами измерения их параметров 9, блок управления и обработки данных 10, блок формирования параметров излучаемых сигналов 11, блок управления временным режимом работы передающего лазера 13, передающий лазер 13.
Устройство работает следующим образом. Предварительно блок пеленгационных приемных устройств 8 с помощью блока формирующей оптики и наведения приемного канала 7 осуществляет поиск и обнаружение характерного оптического излучения пуска и полета УБП, в случае его обнаружения определяет угловые координаты и передает их значения в блок управления и обработки данных 10. На основе поступивших данных блок управления и обработки данных 10 вырабатывает управляющие сигналы и передает их в блоки формирующей оптики и наведения передающего канала 14, формирования параметров излучаемых сигналов 11 и управления временным режимом работы передающего лазера 13. Блок формирующей оптики и наведения передающего канала 14 осуществляет наведение передающего канала в направление УБП. Блоки формирования параметров излучаемых сигналов 11 и управления временным режимом работы передающего лазера 13 осуществляют формирование параметров зондирующего сигнала передающего лазера 14. Передающий лазер 14 излучает сигнал. Отраженный от ОЭК сигнал принимают блок пеленгационных приемных устройств 8 и приемное устройство зондирующих сигналов с элементами измерения их параметров 9. Приемное устройство зондирующих сигналов с элементами измерения их параметров измеряет параметры принятого сигнала, значение которых передает в блок управления и обработки данных 10. Блок пеленгационных приемных устройств 8 определяет пространственные параметры принятого сигнала, значение которых также передает в блок управления и обработки данных 10. Блок управления и обработки данных 10 по поступившим данным с помощью конструктивно реализованных вычислительных возможностей определяет требуемые характеристики функционирования передающего канала на различных этапах полета УБП, вырабатывает соответствующие управляющие сигналы и передает их в блоки формирующей оптики и наведения передающего канала 14, формирования параметров излучаемых сигналов 11 и управления временным режимом работы передающего лазера 13. Блок формирующей оптики и наведения передающего канала 14 осуществляет дальнейшее наведение передающего канала в направление УБП и управление углом расходимости передающего оптического канала в зависимости от взаимного местоположения ОЭК УБП и передающего канала с учетом ошибок пеленгации и целеуказания. Блоки формирования параметров излучаемых сигналов 11 и управления временным режимом работы передающего лазера 13 осуществляют формирование параметров помехового или поражающего сигналов передающего лазера 14 в зависимости от дальности местоположения ОЭК УБП. При этом блок управления временным режимом работы передающего лазера формирует моменты времени излучения импульса, так чтобы «попасть в окно» открытия фотоприемника ОЭК технологическим отверстием растрового диска с учетом прохождения сигнала расстояния до УБП.
Справедливость утверждения основных положений способа подтверждается проведенным математическим моделированием. Например, для растра с амплитудной модуляцией математическое моделирование показало следующие результаты.
В общем случае сигнал, отраженный от ОЭК УБП с растром амплитудной модуляции, в упрощенном виде определяется выражением:

где α - угловое рассогласование положения источника зондирующего лазерного излучения относительно линии визирования ОЭК УБП; θ - угловое рассогласование положения источника зондирующего лазерного излучения относительно границы раздела полупрозрачного и секторного участков растра; αm - половина поля зрения ОЭК УБП; K - коэффициент отражения лазерного излучения непрозрачными участками растра; ωм - циклическая частота вращения модулятора; N - число закрытых (непрозрачных) участков растра; t - время.
Выражение (1) получено при условии, что коэффициенты отражения прозрачных участков растра и фотоприемника ОЭК близки к нулю, а коэффициент отражения полупрозрачного участка растра равен 0,5.
С использованием разработанной математической модели зондирования лазерным излучением ОЭК УБП с амплитудной модуляцией оптического сигнала проведена оценка параметров и структуры отраженного зондирующего сигнала в типовых условиях наведения УБП при различных значениях углов рассогласования между оптической осью ОЭК и направлением на источник лазерного излучения в горизонтальной плоскости α. Расчеты выполнены для случая слабо возмущенной атмосферы. На фигуре 3 показан характер зависимостей s(t,α,θ) от времени t при различных значениях α и θ 
Анализ полученных зависимостей позволяет сделать следующий вывод. Сигнал, отраженный от элементов оптической системы ОЭК УБП с вращающимся амплитудным растром, имеет периодическую структуру и характеризуется амплитудой, периодом повторения, обратно пропорциональным частоте вращения растра, несущей частотой, определяемой периодом вращения и числом секторов растра. Следовательно, анализ параметров и структуры сигнала, отраженного от ОЭК УБП, позволяет сформировать требования к параметрам лазерного излучения, обеспечивающего направленный увод УБП от защищаемого объекта или поражение его ОЭК. Характерная периодическая структура отраженного зондирующего сигнала позволяет идентифицировать тип ОЭК УБП и сформировать лазерное излучение с требуемыми временными параметрами. Также подобные результаты были получены для других типов растров.
Управление углом расходимости может основываться на технической реализации вычисления математических моделей максимизации мощности лазерного изучения в плоскости ОЭК УБП с учетом порогового значения требуемой мощности для оптико-электронного подавления или функционального поражения, а также погрешностей взаимного местоположения ОЭК УБП и ОЭСП, обусловленных несовершенством элементов пеленгации и наведения, колебаниями траектории полета и другими случайными факторами сопровождающими динамику перемещения объектов (см., например, Козирацкий Ю.Л. Оптимизация угла расходимости излучения лазерной локационной системы в условиях помех. - «Радиотехника», №3, 1994, С. 6-10).
Таким образом, у заявляемого способа появляются свойства, заключающиеся в возможности повышения эффективности противодействия УБП за счет снижения требования к энергетическим характеристикам лазерного излучения на основе анализа структуры и характеристик функционирования ОЭК УБП, управления углом расходимости лазерного излучения с учетом ошибок пеленгации и наведения на УБП и поэтапного его радиоэлектронного поражения. Тем самым предлагаемый авторами способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ противодействия УБП, основанный на обнаружении оптического излучения УБП, определении угловых координат УБП и его сопровождении, ориентации передающего оптического канала в направлении УБП, излучении зондирующего оптического сигнала в направлении УБП, приеме отраженного от ОЭК УБП сигнала и измерении его пространственных, частотных и временных параметров, определении по которым дальности и скорости полета ОЭК УБП и уточнении угловых координат ОЭК УБП и их разброса, определении временных параметров открытия фотоприемника ОЭК УБП открытыми участками вращающегося растрового диска, делении в зависимости от их значений и энергетических параметров передающего оптического канала расстояния до ОЭК УБП относительно передающего оптического канала на три зоны: дальняя, средняя и ближняя, изменении величины угловой расходимости лазерного излучения в зависимости от местонахождения ОЭК УБП, величины разброса его угловых координат и погрешности наведения передающего оптического канала в текущий момент времени и излучении оптического излучения в моменты времени открытия фотоприемника ОЭК УБП открытыми участками вращающегося растрового диска с параметрами для: дальней зоны - модулирующей помехи, средней зоны - ослепляющей помехи, ближней зоны - поражающей помехи, контроле величины промаха УБП по траектории его полета.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые оптико-электронные и радиоэлектронные элементы и устройства.
Способ противодействия управляемым боеприпасам, основанный на обнаружении оптического излучения управляемого боеприпаса, определении угловых координат управляемого боеприпаса и его сопровождении, ориентации передающего оптического канала в направлении управляемого боеприпаса, отличающийся тем, излучают зондирующий оптический сигнал в направлении управляемого боеприпаса, принимают отраженный от оптико-электронного координатора управляемого боеприпаса сигнал и измеряют его пространственные, частотные и временные параметры, по которым определяют дальность и скорость полета оптико-электронного координатора управляемого боеприпаса, уточняют угловые координаты оптико-электронного координатора управляемого боеприпаса и их разброс, а также определяют временные параметры открытия фотоприемника оптико-электронного координатора управляемого боеприпаса открытыми участками вращающегося растрового диска, в зависимости от их значений и энергетических параметров передающего оптического канала делят расстояние до оптико-электронного координатора управляемого боеприпаса относительно передающего оптического канала на три зоны: дальняя, средняя и ближняя, меняют величину угловой расходимости передающего оптического канала в зависимости от местонахождения оптико-электронного координатора управляемого боеприпаса, величины разброса его угловых координат и погрешности наведения передающего оптического канала в текущий момент времени и излучают оптическое излучения в моменты времени открытия фотоприемника оптико-электронного координатора управляемого боеприпаса открытыми участками вращающегося растрового диска с параметрами для: дальней зоны - модулирующей помехи, средней зоны - ослепляющей помехи, ближней зоны - поражающей помехи, контролируют величину промаха управляемого боеприпаса по траектории его полета.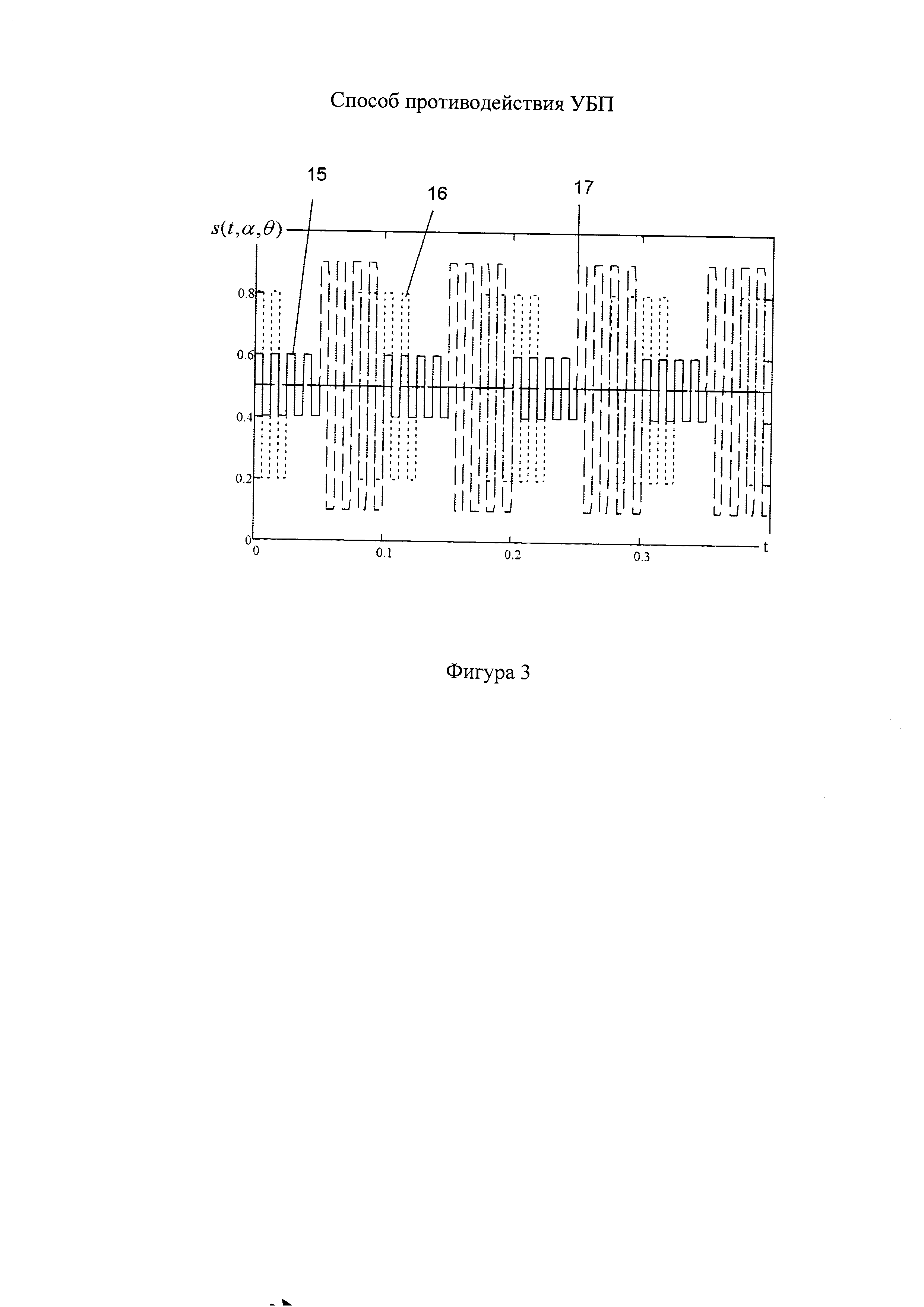
Устройство для заземления передвижных электроустановок
Система посадки летательных аппаратов
Способ постановки протяженного аэрозольного образования для прикрытия группы объектов
Лазерная система посадки летательных аппаратов (ла) на малоразмерные взлетно-посадочные площадки (впп)
Комбинированная ложная цель
Аэродромное световое устройство (варианты)
Способ и система защиты воздушных судов от ракет переносных зенитных ракетных комплексов
Способ определения координат точки падения боеприпаса
Способ определения направления на источник оптического излучения подвижными средствами
Система индикации высоты летательного аппарата (ла) над порогом взлетно - посадочной полосы (впп)
Система посадки летательных аппаратов
Лазерная система посадки летательных аппаратов (ла) на малоразмерные взлетно-посадочные площадки (впп)
Аэродромное световое устройство (варианты)
Способ и система защиты воздушных судов от ракет переносных зенитных ракетных комплексов
Способ определения координат точки падения боеприпаса
Способ определения направления на источник оптического излучения подвижными средствами
Система индикации высоты летательного аппарата (ла) над порогом взлетно - посадочной полосы (впп)
Способ применения тепловой ловушки
Система визуальной посадки летательных аппаратов (ла)
Способ определения отклонения угла наклона плоскости поляризации оптического излучения

