Результат интеллектуальной деятельности: СПОСОБ ДИФФЕРЕНЦИРОВАННОЙ АВТОМАТИЗИРОВАННОЙ ЗАГРУЗКИ ГОРНОЙ МАССЫ В АВТОСАМОСВАЛЫ ПРИ НЕПРЕРЫВНОЙ РАБОТЕ ВЫЕМОЧНОГО АГРЕГАТА И АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА
Вид РИД
Изобретение
Изобретение относится к горной промышленности и может быть использовано преимущественно для дифференцированной загрузки горной массы в автосамосвалы при разработке сложноструктурных месторождений в процессе непрерывной работы выемочного агрегата, например карьерного комбайна.
Известен самоходный бункер-дозатор для загрузки самосвалов [1]. Самоходный бункер-дозатор включает портал с ходовыми тележками, на котором установлены бункерные емкости с затворами, загрузочное устройство, выполненное в виде воронки. Материал в бункеры поступает через приемную воронку и открытый затвор. При заполнении бункерной емкости до заданного уровня срабатывает датчик и поток материала направляется на заполнение второго бункера.
Самоходный бункер не обеспечивает возможности селективной загрузки горной массы в автосамосвалы.
Известны комплекс для погрузки автосамосвалов [2], в котором задействованы два одинаковых загрузочных модуля с возможностью их перестановки и подачи в них горной массы посредством экскаватора. Бункеры установлены на рамах, вместимость которых соответствует грузоподъемности используемых автосамосвалов.
Данный комплекс для загрузки автосамосвалов не способен выполнить задачу при непрерывной работе выемочного агрегата из-за конструктивных и функциональных особенностей комплекса.
Известен способ [3] управления погрузочно-транспортными средствами на карьерах при селективной выемке руд и система автоматизированного управления качеством рудопотока на основе экскаваторно-автомобильного комплекса. Способ включает определение содержания полезного компонента в горной массе в ковше выемочного средства, загрузку транспортного средства и его адресацию по объектам разгрузки с учетом содержания полезного компонента в транспортируемой горной массе. Система автоматизированного управления качеством рудопотока от забоев карьера на основе экскаваторно-автомобильного комплекса включает связанные для обмена информацией между собой посредством соответствующих блоков связи блок ввода номера автосамосвала, блок передачи маршрута, первый блок индикации и блок управления, размещенные на диспетчерском пункте, блок контроля, размещенный на экскаваторе, и блок передачи номера автосамосвала, блок приема маршрута и второй блок индикации, размещенные на автосамосвале.
Использование погрузочно-транспортных средств экскаваторно-автомобильного комплекса с селективной загрузкой на основе регистрации координат ковша в зоне экскавации и определения содержания полезного компонента в ковше интерполяционным методом по результатам опробования не обеспечивает поточность производства и, в значительной мере, производительность процесса.
Наиболее близкими по технической сущности являются способ загрузки горной массы в автосамосвалы и комплекс для осуществления погрузки [4-5]. Комплекс включает два модуля с бункерами для последовательной загрузки автосамосвалов и работает в автоматическом режиме. Это позволяет производить загрузку горной массы без остановки комбайна при смене автосамосвалов.
Данный комплекс обеспечивает поточность производства, но не обеспечивает непрерывную загрузку автосамосвалов при разработке комбайном сложноструктурных месторождений с дифференцируемой по типу загрузки горной массы.
Технический результат заключается в повышении производительности и технологической эффективности работы комплекса при разработке карьерным комбайном сложноструктурных месторождений путем совмещения в автоматическом режиме процессов позиционирования одного из бункеров при погрузке в автосамосвал с позиционированием других бункеров под дифференцируемую по типу загрузку горной массы с конвейера карьерного комбайна.
Технический результат достигается тем, что в способе дифференцированной автоматизированной загрузки горной массы в автосамосвалы при непрерывной работе выемочного агрегата, включающем возможность передвижения модулей с бункерами и подачу горной массы в бункеры с вместимостью, соответствующей грузоподъемности используемых автосамосвалов, осуществление независимых процессов позиционирования одного из бункеров при погрузке в автосамосвал с позиционированием другого бункера под загрузку одновременно с рабочим процессом карьерного комбайна при автоматизации процесса ориентации автоматизированного комплекса для осуществления погрузки относительно карьерного комбайна и автосамосвала - относительно автоматизированного комплекса для осуществления погрузки горной массы из бункеров, имеющих возможность поворота в вертикальной плоскости с помощью телескопических механизмов поворота и шарнирных связей, при фиксировании горной массы с измененными характеристиками, посредством датчиков системы автоматического управления механизмами функционирования комплекса с блоком управления процессом селективной загрузки, конвейер карьерного комбайна поворачивается для загрузки к бункеру промежуточного модуля, позиционируемому в нижнем своем положении под загрузку, при этом реализация независимых процессов позиционирования под загрузку и разгрузку каждого из бункеров происходит при помощи механизмов подъема, обеспечивающих независимое перемещение заполненных бункеров в вертикальной и горизонтальной плоскостях посредством Х-образно связанных приводных и вспомогательных тяг.
В автоматизированном комплексе для осуществления способа, содержащем расположенные в забое модули с возможностью их передвижения и подачи горной массы в установленные шарнирно на верхних рамах бункеры с вместимостью, соответствующей грузоподъемности используемых автосамосвалов, и включающем обеспечение независимых процессов позиционирования одного из бункеров при погрузке в автосамосвал с позиционированием другого бункера под загрузку, механизмы подъема, телескопические механизмы поворота бункеров в вертикальной плоскости относительно шарнирных связей, систему автоматического управления механизмами функционирования комплекса, датчики позиционирования, установленные на нижней раме автоматизированного комплекса и связанные с системой автоматического управления механизмами функционирования комплекса для автоматизации процесса ориентации автоматизированного комплекса относительно карьерного комбайна и относительно автосамосвала в процессе перемещения при работе карьерного комбайна, датчики контроля загрузки бункеров горной массой, размещенные на днищах бункеров, панель управления гидросистемой и электрогенератор, система автоматического управления механизмами функционирования комплекса снабжена блоком управления процессом селективной загрузки с датчиками фиксирования характеристик горной массы установленными на конвейере карьерного комбайна, при этом автоматизированный комплекс снабжен промежуточным модулем, а бункеры модулей снабжены поворотными стенками с механизмами замыкания, при этом механизмы подъема бункеров связаны посредством нижних горизонтальных осей с нижними концами приводных тяг, а опоры качения нижних горизонтальных осей входят во взаимодействие с направляющими нижних рам, при этом верхние концы приводных тяг шарнирно соединены с верхними горизонтальными осями, которые посредством опор качения входят во взаимодействие с направляющими верхних рам, причем приводные тяги посредством шарниров Х-образно связаны со вспомогательными тягами, концы которых фиксированы посредством шарниров с верхними и нижними рамами.
Возможность формирования требуемой последовательности выполняемых действий новым способом и предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
Способ дифференцированной автоматизированной загрузки горной массы в автосамосвалы при непрерывной работе выемочного агрегата и автоматизированный комплекс для осуществления способа изображены на чертежах.
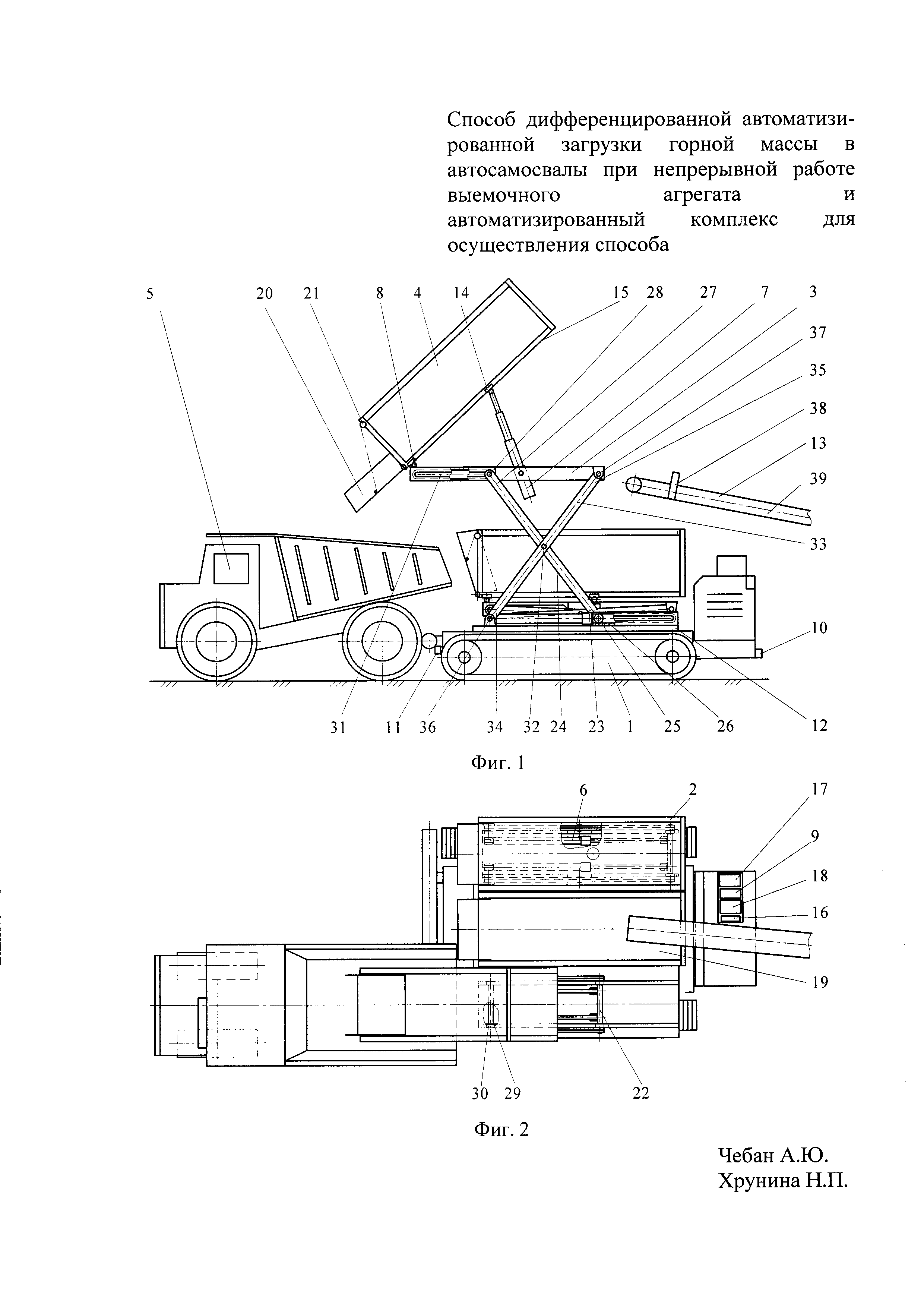
На фиг. 1 - общий вид автоматизированного комплекса при одновременной загрузке горной массы в автосамосвал и отдельно - в бункер; на фиг. 2 - вид сверху на фиг. 1.
Автоматизированный комплекс 1 для осуществления способа содержит расположенные в забое модули 2 с возможностью их передвижения и подачи горной массы в установленные на верхних рамах 3 бункеры 4 с вместимостью, соответствующей грузоподъемности используемых автосамосвалов 5. Автоматизированный комплекс 1 включает обеспечение независимых процессов позиционирования одного из бункеров 4 при погрузке в автосамосвал 5 с позиционированием другого бункера 4 под загрузку. Автоматизированный комплекс 1 снабжен механизмами подъема 6, телескопическими механизмами поворота 7 бункеров 4 в вертикальной плоскости относительно шарнирных связей 8, системой автоматического управления механизмами функционирования комплекса 9, датчиками позиционирования 10, 11. Датчики позиционирования 10, 11 установлены на нижней раме 12 автоматизированного комплекса 1 и связаны с системой автоматического управления механизмами функционирования комплекса 9 для автоматизации процесса ориентации автоматизированного комплекса 1 относительно выемочного агрегата, например карьерного комбайна 13, и относительно автосамосвала 5 в процессе перемещения при работе карьерного комбайна 13. Датчики 14 контроля загрузки бункеров 4 горной массой размещены на днищах 15 бункеров 4. Панель управления гидросистемой 16 и электрогенератор 17 размещены на нижней раме 12 комплекса 1. Система автоматического управления механизмами функционирования комплекса 9 снабжена блоком управления процессом селективной загрузки 18. Автоматизированный комплекс 1 снабжен промежуточным модулем 19 с бункером 4. Бункеры 4 модулей 2 и промежуточного модуля 19 снабжены поворотными стенками 20 с механизмами замыкания 21. Механизмы подъема 6 бункеров 4 связаны посредством нижних горизонтальных осей 22 с нижними концами 23 приводных тяг 24. Опоры качения 25 нижних горизонтальных осей 22 входят во взаимодействие с направляющими 26 нижних рам 12. Верхние концы 27 приводных тяг 24 шарнирно 28 соединены с верхними горизонтальными осями 29, которые посредством опор качения 30 входят во взаимодействие с направляющими 31 верхних рам 3. Приводные тяги 24 посредством шарниров 32 Х-образно связаны со вспомогательными тягами 33, концы 34, 35 которых фиксированы посредством шарниров 36, 37 с верхними 3 и нижними рамами 12. Блок управления процессом селективной загрузки 18 системы автоматического управления механизмами функционирования комплекса 9 связан с датчиками 38 фиксирования изменений характеристик горной массы, установленными на конвейере 39 карьерного комбайна 13.
Способ дифференцированной автоматизированной загрузки горной массы в автосамосвалы при непрерывной работе выемочного агрегата реализуется следующим образом.
Комплекс 1 обеспечивает возможность передвижения модулей 2 с бункерами 4 и подачу горной массы в бункеры 4 с вместимостью, соответствующей грузоподъемности используемых автосамосвалов 5. Независимые процессы позиционирования одного из бункеров 4 при погрузке в автосамосвал 5 с позиционированием другого бункера 4 под загрузку осуществляется одновременно с рабочим процессом выемочного агрегата, например карьерного комбайна 13. Данный процесс осуществляется в автоматическом режиме с помощью системы автоматического управления механизмами функционирования комплекса 9 с датчиками позиционирования 10, 11, установленными на нижней раме 12 автоматизированного комплекса 1, датчиками 14 контроля загрузки бункеров 4 горной массой, размещенными на днищах 15 бункеров 4, и электрогенератора 17. Осуществление погрузки горной массы из бункеров 4 в автосамосвал 5 осуществляется с помощью телескопических механизмов поворота 7 и шарнирных связей 8, при этом поворотные стенки 20 с механизмами замыкания 21 открываются, обеспечивая равномерную подачу горной массы. При фиксировании горной массы с измененными характеристиками, посредством установленных на конвейере 39 карьерного комбайна 13 датчиков 38 системы автоматического управления механизмами функционирования комплекса 9, сигнал подается на блок управления процессом селективной загрузки 18 и затем - на пульт управления карьерного комбайна 13. Конвейер 39 карьерного комбайна 13 поворачивается для загрузки к бункеру 4 промежуточного модуля 19, позиционируемому в нижнем своем положении под загрузку. Реализация независимых процессов позиционирования под загрузку и разгрузку каждого из бункеров 4 происходит при помощи механизмов подъема 6, обеспечивающих независимое перемещение заполненных бункеров 4 в вертикальной и горизонтальной плоскостях посредством шарниров 32 Х-образно связанных приводных 24 и вспомогательных тяг 33. Механизмы подъема 6 бункеров 4, связанные с панелью управления гидросистемой 16, воздействуют, посредством нижних горизонтальных осей 22, на нижние концы 23 приводных тяг 24. Опоры качения 25 нижних горизонтальных осей 22 входят во взаимодействие с направляющими 26 нижних рам 12. Верхние концы 27 приводных тяг 24 шарнирно 28 соединены с верхними горизонтальными осями 29, которые посредством опор качения 30 входят во взаимодействие с направляющими 31 верхних рам 3. Концы 34, 35 вспомогательных тяг 33 поворачиваются на шарнирах 36 нижних рам 12 и шарнирах 37 верхних рам 3.
Источники информации
1. Авторское свидетельство СССР №625993 от 30.09.1978. Самоходный бункер-дозатор для загрузки самосвалов.
2. Патент РФ №2272144 от 20.03.2006. Комплекс для погрузки автосамосвалов.
3. Патент РФ №2100844 от 27.12.1997. Способ управления погрузочно-транспортными средствами на карьерах при селективной выемке руд и система автоматизированного управления качеством рудопотока на основе экскаваторно-автомобильного комплекса.
4. Патент РФ №2530962 от 20.10.2014. Способ загрузки горной массы в автосамосвалы и комплекс для осуществления погрузки.
5. Чебан А.Ю., Хрунина Н.П. Техника и технологии разработки месторождений цементного сырья на Дальнем Востоке и перспективы их развития // Системы. Методы. Технологии. 2014. №1 (21). С. 131-135.
Способ струйно-акустической дезинтеграции минеральной составляющей гидросмеси и гидродинамический генератор акустических колебаний
Способ дезинтеграции минеральной составляющей гидросмеси в условиях резонансных акустических явлений в гидропотоке и геотехнологический комплекс для его осуществления
Способ извлечения тонкодисперсного золота из глинистых отложений
Способ подготовки к выемке скальных пород с использованием лазерного воздействия и автоматизированный комплекс для его осуществления
Способ управления лазерной обработкой скальной породы переменной крепости и система для его осуществления
Способ загрузки горной массы в автосамосвалы и комплекс для осуществления погрузки
Способ освоения месторождений строительных горных пород скального и полускального типов
Способ освоения нескальных пластовых и пластообразных месторождений наклонного и крутого падения
Способ разрушения негабаритов горных пород с использованием лазерного воздействия и роботизированный комплекс для его осуществления
Способ освоения алмазорудных месторождений
Способ струйно-акустической дезинтеграции минеральной составляющей гидросмеси и гидродинамический генератор акустических колебаний
Способ дезинтеграции минеральной составляющей гидросмеси в условиях резонансных акустических явлений в гидропотоке и геотехнологический комплекс для его осуществления
Способ извлечения тонкодисперсного золота из глинистых отложений
Способ подготовки к выемке скальных пород с использованием лазерного воздействия и автоматизированный комплекс для его осуществления
Способ управления лазерной обработкой скальной породы переменной крепости и система для его осуществления
Способ загрузки горной массы в автосамосвалы и комплекс для осуществления погрузки
Способ освоения месторождений строительных горных пород скального и полускального типов
Способ освоения нескальных пластовых и пластообразных месторождений наклонного и крутого падения
Способ разрушения негабаритов горных пород с использованием лазерного воздействия и роботизированный комплекс для его осуществления
Способ освоения алмазорудных месторождений

