Результат интеллектуальной деятельности: СПОСОБ ГРУБОГО УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ САМОЛЕТА И СИСТЕМА ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области систем управления, а именно к системам автоматического управления нестационарным объектом, в частности к способам и системам управления пространственным движением самолета.
Известен способ пространственного управления самолетом [1], заключающийся в том, что формируют сигнал задания по углу крена, формируют сигнал задания по углу рыскания, измеряют угол крена, измеряют угол рыскания, измеряют угол тангажа, формируют сигналы управления по углу крена и по углу рыскания.
Известна система управления самолетом [1], содержащая последовательно соединенные задатчик угла рыскания, первый регулятор, первое исполнительное устройство и объект управления (самолет), последовательно соединенные задатчик угла крена, второй регулятор и второе исполнительное устройство, выход которого соединен со вторым входом объекта управления, первый выход которого соединен через датчик угла рыскания с первыми входами первого и второго регуляторов, второй выход через датчик угла тангажа соединен со вторыми входами первого и второго регуляторов, третий выход через датчик угла крена соединен с третьими входами первого и второго регуляторов, к четвертым входам которых подключены соответственно задатчик угла рыскания и задатчик угла крена.
К недостаткам известных способа и системы управления пространственным движением самолета относится изменение качества переходного процесса и потеря устойчивости системы управления при нестационарных параметрах самолета, которые меняются в процессе полета на разных высотах и при действии адаптивных помех (например, в виде действия ветра).
С целью обеспечения устойчивости движения и обеспечения заданного желаемого вида переходных процессов при действии координатных f(t) и параметрических F(t) помех способ управления отличается тем, что формируют эталонный сигнал по углу крена, формируют эталонный сигнал по углу рыскания, определяют первый сигнал разности между эталонным сигналом по углу крена и углом крена, определяют второй сигнал разности между эталонным сигналом по углу рыскания и углом рыскания, первый сигнал разности отдельно интегрируют, дифференцируют, масштабируют и суммируют с сигналом управления по углу крена, второй сигнал разности отдельно масштабируют, дифференцируют, интегрируют и суммируют их с сигналом управления по углу тангажа, а система управления отличается тем, что дополнительно содержит две эталонные модели, шесть усилителей, четыре сумматора, два дифференциатора и два интегратора, выход задатчика угла рыскания через последовательно соединенные первую эталонную модель, первый сумматор, первый усилитель, первый интегратор и второй сумматор подключен к пятому входу первого регулятора, выход задатчика угла крена через последовательно соединенные вторую эталонную модель, третий сумматор, второй усилитель, второй интегратор и четвертый сумматор подключен к пятому входу второго регулятора, выход первого сумматора соединен со вторым входом второго сумматора через последовательно соединенные третий усилитель и первый дифференциатор, а с третьим входом второго сумматора - через четвертый усилитель, выход третьего сумматора подключен ко второму входу четвертого сумматора через последовательно соединенные пятый усилитель и второй дифференциатор, а к третьему входу - через шестой усилитель.
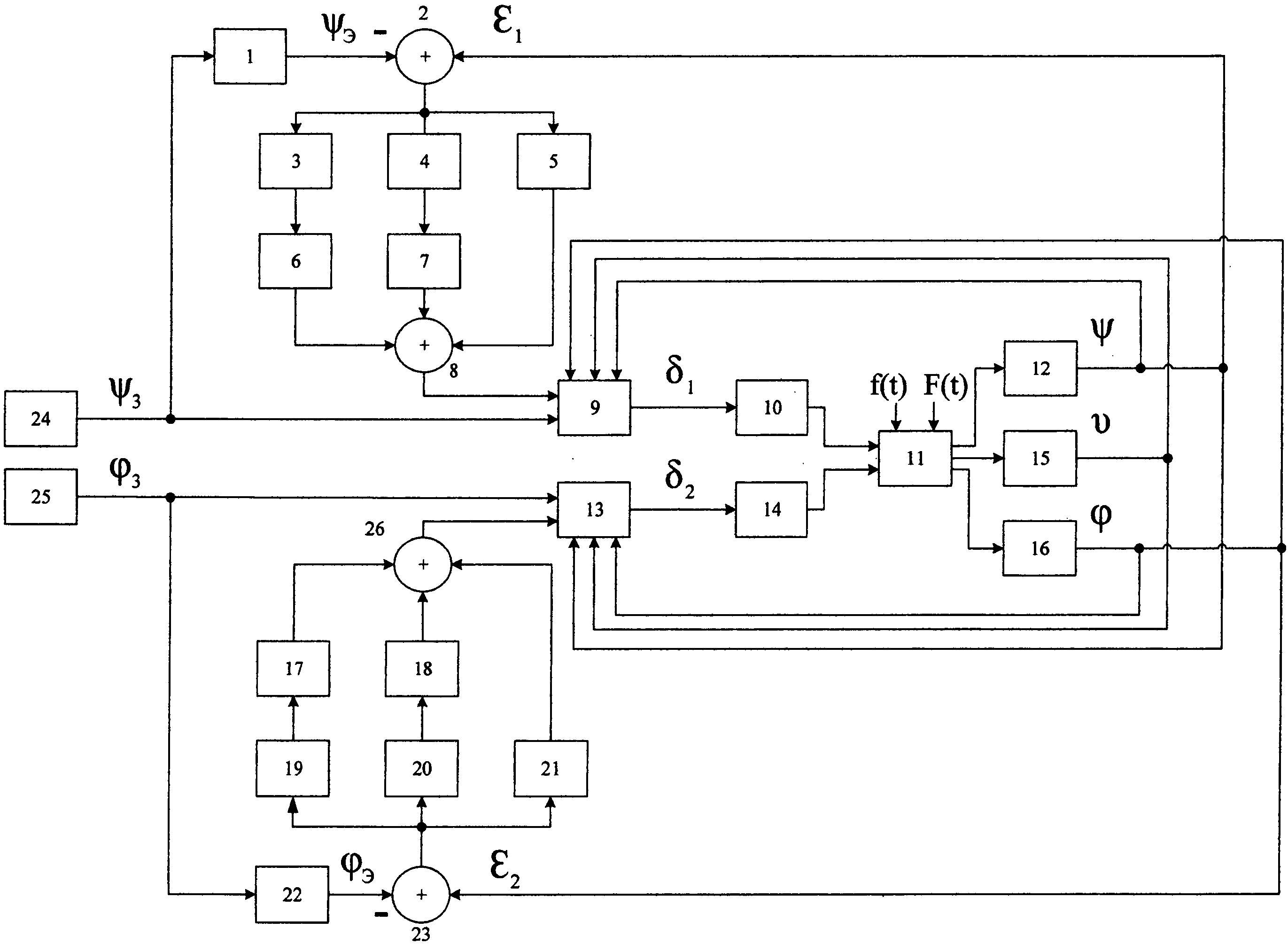
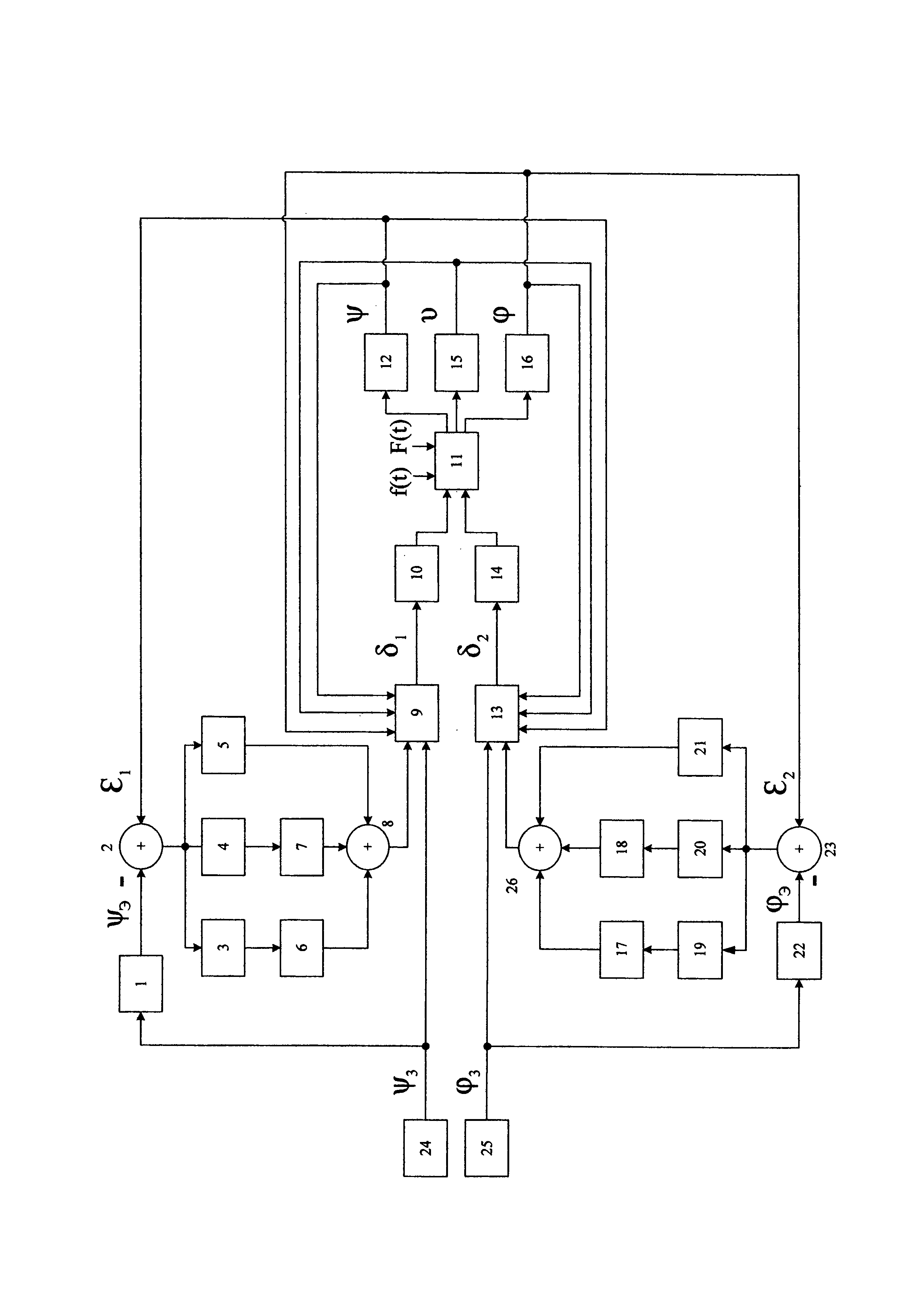
Изобретение поясняется чертежом, на котором приняты следующие обозначения:
1 - первая эталонная модель;
2 - первый сумматор;
3, 4, 5 - соответственно первый, третий и четвертый усилители;
6 - первый интегратор;
7 - второй дифференциатор;
8 - второй сумматор;
9 - первый регулятор;
10 - первое исполнительное устройство;
11 - объект управления (самолет);
12 - датчик угла рыскания;
13 - второй регулятор;
14 - второе исполнительное устройство;
15 - датчик угла тангажа;
16 - датчик угла крена;
17, 18 - соответственно второй и пятый усилители;
19 - второй интегратор;
20 - второй дифференциатор;
21 - шестой усилитель;
22 - вторая эталонная модель;
23 - третий сумматор;
24 - задатчик угла рыскания;
25 - задатчик угла крена;
26 - четвертый сумматор.
Рассматриваются линейный объект управления 11 первого порядка, исполнительные устройства 10 и 14 первого порядка, датчики углов рыскания 12 и крена 16 безынерционные.
В [1] показано каким образом сформировать управления δ1(t) и δ2(t), которые позволяют независимо друг от друга управлять соответственно углом рыскания ψ(t) и углом крена φ(t). Однако при действии координатных f(t) и параметрических F(t) помех значения ψ(t) и φ(t) на выходе объекта управления 11 меняются и не соответствуют, в общем случае, заданным соответственно ψ2(t) и φ2(t). При этом может быть значительное отклонение переходных процессов от желаемых. Изменение параметров объекта управления 11 под действием помех F(t) может привести к потере устойчивости при широком диапазоне изменения параметров самолета на разных высотах полета.
Функционирование системы по двум идентичным каналам управления самолетом по углу рыскания ψ(t) и крена φ(t) представлено в [1].
Канал управления по углу рыскания состоит из последовательно соединенных задатчика угла рыскания 24, первого регулятора 9, первого исполнительного устройства 10, объекта управления 11 и датчика угла рыскания 12, выход которого соединен первыми входами первого 9 и второго 11 регуляторов.
По углу крена φ(t) объекта управления 11 аналогично каналу управления по углу рыскания ψ(t) управление происходит с помощью замкнутого контура, включающего задатчик угла крена 25, второй регулятор 13, объект управления 11 и датчик угла крена 16, выходом подключенного к третьим входам первого 9 и второго 13 регуляторов.
Эталонные модели 1 и 22 имеют такие параметры, чтобы они были устойчивы и обеспечивали заданные переходные процессы по каналам управления соответственно по рысканию ψ(t) и по крену.
Отклонение выхода ψ(t) объекта управления 11 от заданного ψ3(t) на выходе первой эталонной модели 1 приводит к появлению ошибки εε1=ψ3(t)-ψ(t) выходе первого сумматора 2. Затем сигнал ошибки усиливается усилителями 3, 4 и 5, интегрируется (первым интегратором 6), дифференцируется (первым дифференциатором 7). Сумма полученных пропорциональной, интегральной и дифференциальной составляющих на выходе второго сумматора 8  поступает в качестве корректирующего сигнала на вход первого регулятора 9. В результате при εε1(t)=0 значение ψ(t) будет равно желаемому значению сигнала ψ3(t).
поступает в качестве корректирующего сигнала на вход первого регулятора 9. В результате при εε1(t)=0 значение ψ(t) будет равно желаемому значению сигнала ψ3(t).
Коррекция сигнала ошибки εε1=φ3(t)-φ(t) осуществляется аналогично коррекции сигнала ошибки εε1(t) с помощью соединения (как показано на чертеже) второй эталонной модели 22, третьего 23 и четвертого сумматоров, четвертого 17, пятого 18 и шестого 21 усилителей, второго интегратора 19 и второго дифференциатора.
По сути регуляторы 9 и 13 представляют собой сумматоры [1].
В результате при действии помех F(t) и f(t) значения ψ(t) и φ(t) будут близкими соответственно ψ2(t) и φ2(t).
Таким образом, технический результат от использования изобретения позволяет повысить качество переходных процессов и повысить запас устойчивости системы грубого управления.
Изобретательский уровень предложенного технического решения подтверждается отличительными частями формулы изобретения на способ грубого управления и системы для его реализации.
Литература
1. В.Д. Елисеев, А.К. Комаров «Многомерные модально-инвариантные системы управления». М.: Издательство МАИ, 1989, стр. 2-10.
Сверхпроводящий магнитный подвес для кинетического накопителя энергии
Устройство и способ компенсации узкополосных помех в цифровых радиосистемах передачи информации
Способ изготовления гофрированного листа для теплообменника из композиционных материалов
Способ ориентации космического аппарата по углу крена и устройство для его реализации
Микро-опто-электромеханический двухосевой датчик угловой скорости и линейного ускорения
Квазикогерентный демодулятор сигналов бинарной фазовой манипуляции
Квазикогерентный модулятор сигналов бинарной фазовой манипуляции
Способ ориентации космического аппарата по углу крена и устройство для его реализации
Боковая ручка управления самолетом
Система управления жизненно важными рулевыми поверхностями самолета
Сверхпроводящий магнитный подвес для кинетического накопителя энергии
Устройство и способ компенсации узкополосных помех в цифровых радиосистемах передачи информации
Способ изготовления гофрированного листа для теплообменника из композиционных материалов
Способ ориентации космического аппарата по углу крена и устройство для его реализации
Микро-опто-электромеханический двухосевой датчик угловой скорости и линейного ускорения
Квазикогерентный демодулятор сигналов бинарной фазовой манипуляции
Квазикогерентный модулятор сигналов бинарной фазовой манипуляции
Способ ориентации космического аппарата по углу крена и устройство для его реализации
Боковая ручка управления самолетом
Система управления жизненно важными рулевыми поверхностями самолета

