Результат интеллектуальной деятельности: СПОСОБ РАЗГРУЗКИ СИЛОВЫХ ГИРОСКОПОВ КОСМИЧЕСКОГО АППАРАТА С СОЗДАВАЕМЫМ МАГНИТНЫМ МОМЕНТОМ
Вид РИД
Изобретение
Изобретение относится к космической технике и может использоваться для разгрузки системы силовых гироскопов (СГ) космических аппаратов (КА) от накопленного кинетического момента. В системах ориентации современных КА широко применяются в качестве исполнительных органов СГ (Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. Москва. «Наука». 1974) [1]. Они позволяют значительно уменьшить расход рабочего тела реактивных двигателей КА при выполнении программы полета, однако требуют постоянной или периодической разгрузки от накопленного кинетического момента. Один из наиболее эффективных способов разгрузки заключается в использовании управляющего магнитного момента, получаемого от взаимодействия магнитного поля Земли с магнитными моментами, свойственными самому КА.
Известен способ разгрузки системы СГ КА, заключающийся в измерении индукции магнитного поля Земли (МПЗ), измерении накопленного кинетического момента в системе СГ, определении необходимых проекций магнитного момента системы магнитных исполнительных органов (МИО) для разгрузки СГ, формировании магнитного момента в МИО, который взаимодействуя с МПЗ, создает управляющий момент сил, разгружающий систему СГ (Кирилин А.Н., Ахметов Р.Н., Соллогуб А.В., Макаров В.П. Методы обеспечения живучести низкоорбитальных автоматических КА зондирования Земли. Москва. «Машиностроение». 2010) [2, стр. 196]. Использование специальных МИО приводит к дополнительному потреблению электроэнергии, а также снижает массу полезной нагрузки, выводимой на орбиту.
Известен способ формирования разгрузочного момента для системы СГ от накопленного кинетического момента с использованием токовых контуров солнечных батарей (СБ) (Патент RU 2030338 С1. МКИ В64G 1/28 / Ковтун В.С., Кузьмичев А.Ю., Платонов В.Н. Способ формирования разгрузочного момента для системы силовых гироскопов космического аппарата с солнечными батареями // Изобретения. 1995. №7) [3]. Указанный способ разгрузки системы СГ как наиболее близкий по технической сущности к предлагаемому изобретению принимается авторами за прототип. Суть способа заключается в формировании сигнала управления на токовые контуры СБ КА для создания магнитных моментов, измерение вектора кинетического момента, накопленного в системе силовых гироскопов, измерении вектора индукции МПЗ, определение единичного вектора разгрузочного момента, получаемого от взаимодействия магнитных моментов токовых контуров СБ с МПЗ, определении по указанному вектору и вектору накопленного кинетического момента условий разгрузки СГ, обеспечении путем управления токовыми контурами СБ указанных условий.
В способе-прототипе отсутствует расход электроэнергии на формирование разгрузочного момента, а также не требуется иметь на борту КА специальный МИО. К основным недостаткам способа-прототипа можно отнести невозможность проводить разгрузку СГ на теневых интервалах орбиты КА, а также необходимость разработки системы управления токовыми контурами СБ для получения возможности разворота контуров в требуемом направлении, обеспечивающем разгрузку СГ.
Задачей изобретения является повышение эффективности разгрузки СГ за счет увеличения значения разгрузочного момента, получаемого от взаимодействия магнитных моментов токовых контуров, образованных в различных устройствах КА с МПЗ, а также использования указанного разгрузочного момента на теневых интервалах орбиты КА.
Для достижения указанного технического результата в способе разгрузки силовых гироскопов космического аппарата с создаваемым магнитным моментом, включающем измерение текущего значения вектора накопленного кинетического момента  в системе силовых гироскопов, измерение вектора индукции магнитного поля Земли
в системе силовых гироскопов, измерение вектора индукции магнитного поля Земли  , определение, получаемого в результате взаимодействия магнитных моментов
, определение, получаемого в результате взаимодействия магнитных моментов  токовых контуров с магнитным полем Земли, единичного вектора разгрузочного момента
токовых контуров с магнитным полем Земли, единичного вектора разгрузочного момента 
формирование сигнала управления на токовые контуры КА путем изменения величины и направления протекания тока для обеспечения условий разгрузки силовых гироскопов от накопленного кинетического момента

где  ,
,
предварительно в q-x диаграммообразующих схемах, где q=1, 2,…,Q, в каждом p-м режиме работы фазированной антенной решетки, где р=1, 2,…,Р, измеряют значения токов в контурах питания Ipq и площадей Spq контуров, а также определяют направления нормалей  обхода токовых контуров, определяют магнитные моменты для каждого токового контура
обхода токовых контуров, определяют магнитные моменты для каждого токового контура

по магнитным моментам для каждого токового контура определяют значение магнитного момента фазированной антенной решетки в каждом p-м режиме работы
определяют значения единичных векторов  разгрузочных моментов, создаваемых в результате взаимодействия магнитных моментов фазированной антенной решетки с магнитным полем Земли при
разгрузочных моментов, создаваемых в результате взаимодействия магнитных моментов фазированной антенной решетки с магнитным полем Земли при  , далее при выполнении условия разгрузки силовых гироскопов от накопленного кинетического момента, где
, далее при выполнении условия разгрузки силовых гироскопов от накопленного кинетического момента, где  , определяют
, определяют  режимы работы фазированной антенной решетки
режимы работы фазированной антенной решетки  для проведения разгрузки системы силовых гироскопов от накопленного кинетического момента, определяют значения проекции вектора разгрузочного момента на направление вектора
для проведения разгрузки системы силовых гироскопов от накопленного кинетического момента, определяют значения проекции вектора разгрузочного момента на направление вектора 

где  ,
,  - значения векторов
- значения векторов  ,
,  для
для  режимов работы фазированной антенной решетки, по максимальному значению
режимов работы фазированной антенной решетки, по максимальному значению  определяют
определяют  -й режим работы фазированной антенной решетки для разгрузки системы силовых гироскопов и в случае выполнения условия
-й режим работы фазированной антенной решетки для разгрузки системы силовых гироскопов и в случае выполнения условия

где  - значение вектора
- значение вектора  для
для  -го режима, производят повторное формирование разгрузочного момента путем изменения режима работы фазированной антенной решетки, формирование сигнала управления для разгрузки силовых гироскопов прекращают при получении значения
-го режима, производят повторное формирование разгрузочного момента путем изменения режима работы фазированной антенной решетки, формирование сигнала управления для разгрузки силовых гироскопов прекращают при получении значения  .
.
Суть предлагаемого способа заключается в использовании токовых контуров диаграммообразующих схем (ДОС) фазированных антенных решеток (ФАР) КА, которые при взаимодействии с МПЗ создают магнитные управляющие моменты, для обеспечения разгрузки СГ от накопленного кинетического момента.
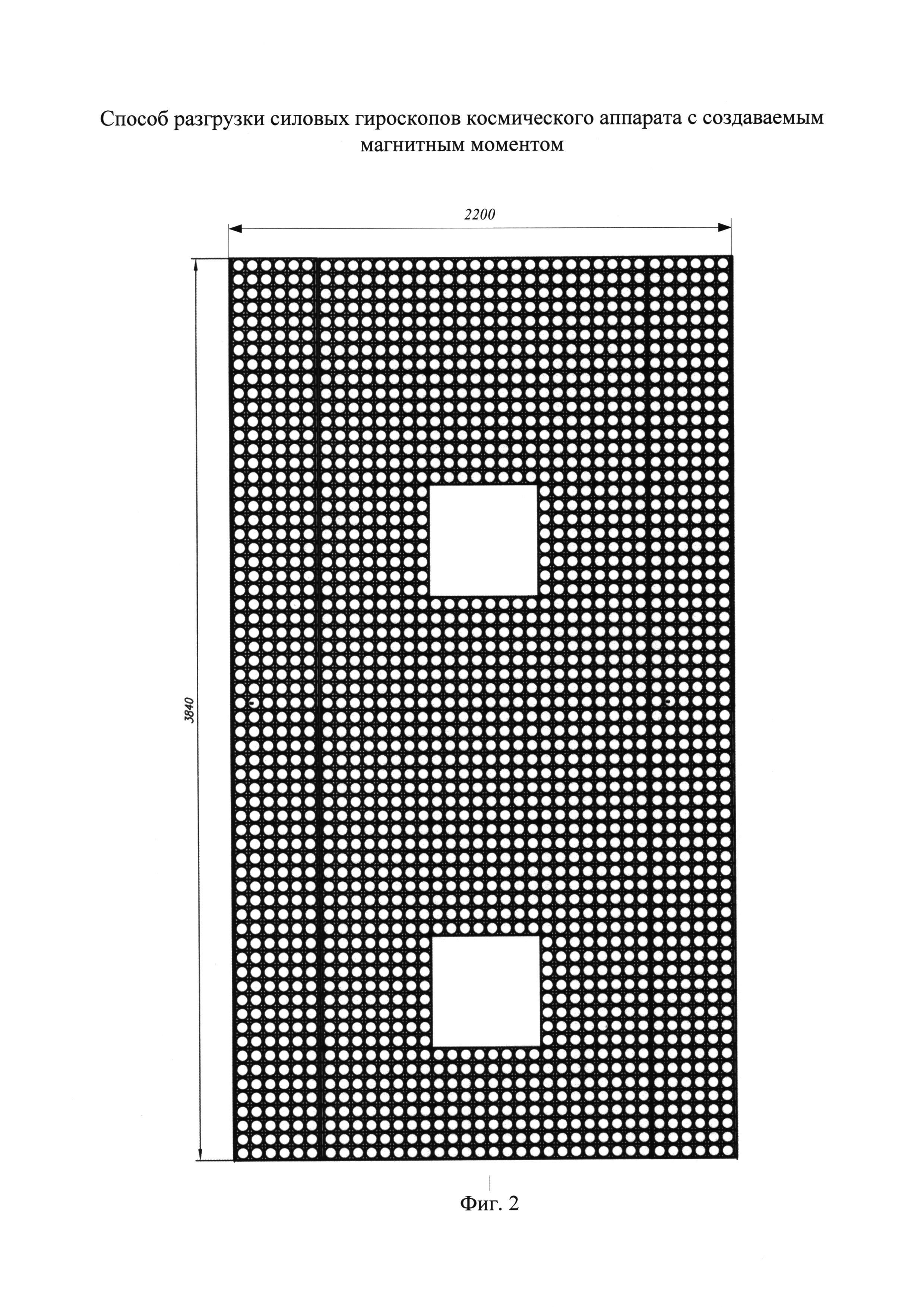
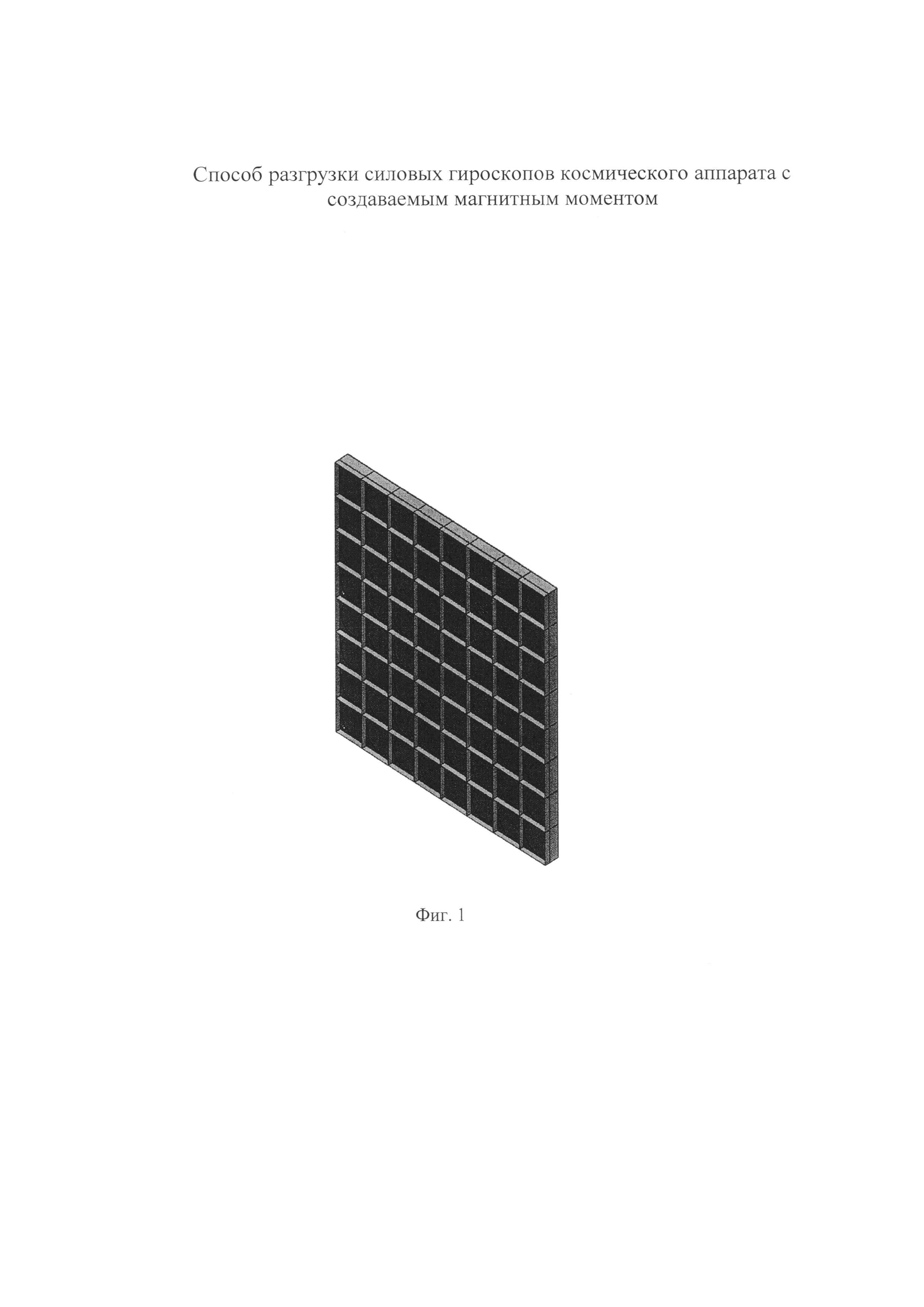
Для объяснения предлагаемого способа рассмотрим ФАР, состоящую из модулей (см. фиг. 1), являющихся элементами панели (см. фиг. 2) приемо-передающей активной ФАР. Размер модулей 480×480×40 в центральных частях панели, по краям - размер 480×380×40. При этом панель содержит µ1=22 модуля размером 480×480×40 и µ2=16 модулей размером 480×380×40. Каждый модуль содержит антенное полотно и элементы формирования лучей в сигналы с номинальной полосой частот. В состав модуля на фиг. 1 входят:
- 64 антенны, работающие в заданном диапазоне частот, которые объединены синфазным разветвителем-сумматором в 16 антенных элементов;
- 16 переключателей прием-передача;
- 16 приемных и 16 передающих усилителей;
- 16-ти канальные СВЧ сумматор и разветвитель, в котором встроены управляемые элементы формирования лучей;
- преобразователи напряжения +50В (75В) в +5В и в другие необходимые напряжения;
- цифровая схема управления.
Функциональная схема управления модуля содержит 16 приемо-передающих ячеек с реверсивным усилительным трактом и управляемой круговой поляризацией излучения и приема сигналов. Основанием конструкции является многослойная печатная плата (МПП). Один из крайних слоев отведен под разводку и монтаж всех навесных элементов. Часть слоев в МПП являются слоями питания и цифровых сигналов, в том числе транслируемых на другие МПП в пределах панели ФАР. Между МПП электрические сигналы и питание передаются через гибкие шлейфы.
Архитектура модуля соответствует двухполяризационной ФАР со скрещенными микрополосковыми излучателями. При этом ДОС разных поляризаций отделены экраном (Вендик О.Г., Парнес М.Д. Антенны с электронным движением луча. Под редакцией Л.Д. Бахраха. С.-Петербург, 2001) [4, стр. 215]. Каждой ДОС, при работе ФАР, соответствует определенное электрическое поле. Поле характеризуется токовым контуром, охватывающим характерный вид площади в поперечном сечении линии передачи ДОС [4, стр. 233]. В свою очередь вид площади зависит от типа ДОС. В рассматриваемом примере, для ДОС с последовательным питанием на симметричной полосковой линии с направленными ответвителями, площадь токового контура имеет вид прямоугольника [4, стр. 233].
Величина тока в контуре ДОС и направление его протекания определяется режимами работы ФАР - «приема», «передачи», «приема-передачи», изменениями мощности сигнала в приемо-передающем тракте, - которые могут быть реализованы в разных частотных диапазонах с разворотом токовых контуров в реверсивном усилительном тракте. При этом в антенных решетках с частотным сканированием формированию разных частот будут соответствовать разные токовые контуры питания ДОС. В качестве примеров могут служить случаи электронно-коммутируемого питания, в которых формируются несколько лучей одновременно - это матрица Батлера и линза Люнеберга [4, стр. 208-209]. Схемы питания в обоих случаях предполагают изменения в формировании токовых контуров на плоской конструктивной поверхности ФАР. На конечные значения тока и площади контура могут влиять также технологические особенности изготовления ФАР, а также допустимые отклонения в работе электрических преобразователей, через которые обеспечивается питание ДОС.
Поэтому, после изготовления ФАР, до начала ее эксплуатации, предварительно измеряют в q-x ДОС, где q=1, 2,…,Q, в каждом p-м режиме работы фазированной антенной решетки, где p=1, 2,…,Р, значения токов в контурах питания Ipq и площадей Spq контуров. Для измерений площади применяют термографы (тепловизоры) - различного рода инфракрасные камеры, использующие длину волн от среднего инфракрасного до терагерцового диапазона. В результате получают снимки электрических (или тепловых) полей для используемых типов ДОС в разных режимах их работы [4, стр. 233], по которым измеряют площади токовых контуров.
Направления нормалей  к каждому токовому контуру ДОС определяют исходя из логики работы переключателей антенной решетки по алгоритму коммутации схемы питания. По полученным данным определяют магнитные моменты
к каждому токовому контуру ДОС определяют исходя из логики работы переключателей антенной решетки по алгоритму коммутации схемы питания. По полученным данным определяют магнитные моменты  , см. (3).
, см. (3).
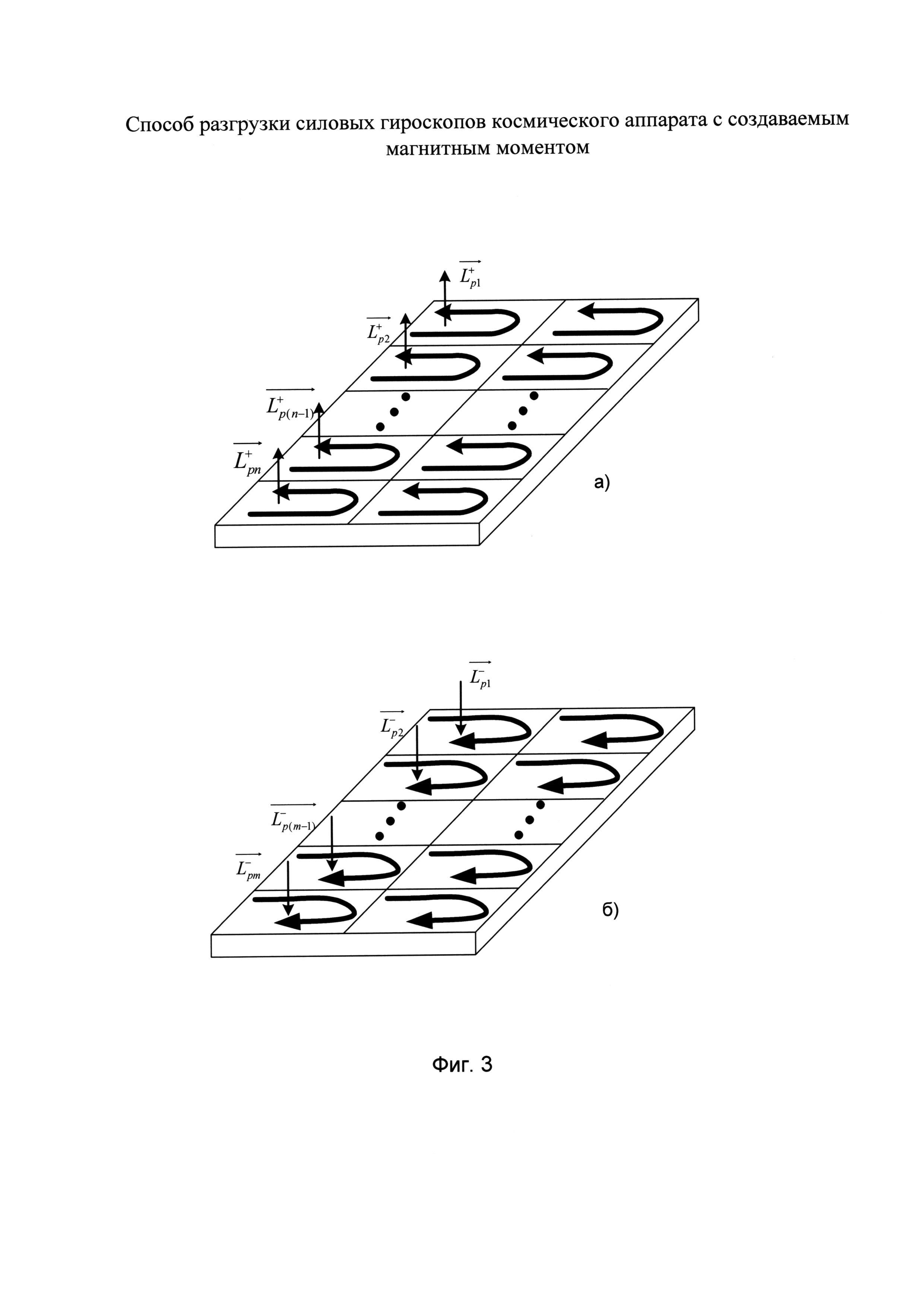
В результате для каждого модуля ФАР можно определить величину и направление указанных векторов (см фиг. 3). При этом указанные векторы могут иметь как положительные  , n=1, 2,…,N, N⊂Q (фиг. 3, a), так и отрицательные
, n=1, 2,…,N, N⊂Q (фиг. 3, a), так и отрицательные  , m=1, 2,…,M, M⊂Q направления (фиг. 3, б). Модули указанных векторов могут также отличаться между собой. По определенным значениям собственных магнитных моментов для каждого модуля определяют магнитные моменты для панели ФАР (см. фиг. 2) в целом. Т.е. в результате определяют значение собственного магнитного момента панели фазированной антенной решетки в каждом p-м режиме ее работы по выражению (4), при этом значения q могут принимать как n-е, так и m-е значения. Следовательно, экспериментально-расчетным методом определяется собственный магнитный момент панели ФАР в каждом p-м режиме работы, где p=1, 2,…,Р. При этом в одних и тех же функциональных режимах («приема» или «передачи»), разными способами коммутации панелей, могут создаваться магнитные моменты разного знака. Таким образом, направлено, за счет реверсивного тракта питания отдельных модулей, обеспечивается формирование режимов работы панелей ФАР, в которых суммируются [см. (4)] только положительные
, m=1, 2,…,M, M⊂Q направления (фиг. 3, б). Модули указанных векторов могут также отличаться между собой. По определенным значениям собственных магнитных моментов для каждого модуля определяют магнитные моменты для панели ФАР (см. фиг. 2) в целом. Т.е. в результате определяют значение собственного магнитного момента панели фазированной антенной решетки в каждом p-м режиме ее работы по выражению (4), при этом значения q могут принимать как n-е, так и m-е значения. Следовательно, экспериментально-расчетным методом определяется собственный магнитный момент панели ФАР в каждом p-м режиме работы, где p=1, 2,…,Р. При этом в одних и тех же функциональных режимах («приема» или «передачи»), разными способами коммутации панелей, могут создаваться магнитные моменты разного знака. Таким образом, направлено, за счет реверсивного тракта питания отдельных модулей, обеспечивается формирование режимов работы панелей ФАР, в которых суммируются [см. (4)] только положительные  или отрицательные
или отрицательные  магнитные моменты. В определенных режимах работы векторы разных знаков взаимно компенсируются, в таких случаях панель является «магнитоуравновешенной»
магнитные моменты. В определенных режимах работы векторы разных знаков взаимно компенсируются, в таких случаях панель является «магнитоуравновешенной»  . При отключении питания ФАР решетка также является «магнитоуравновешенной».
. При отключении питания ФАР решетка также является «магнитоуравновешенной».
Если на КА установлено несколько таких панелей, то определяют их суммарный магнитный момент по ранее указанному выражению (4). При этом суммируют магнитные моменты всех токовых контуров ДОС ФАР, полученных в составленных панелях. В таких случаях «магнитоуравновешенность» в целом может достигаться за счет равных противоположно направленных собственных магнитных моментов токовых контуров в парных панелях. А в случае использования в работе одной из панелей пары появляется соответствующая составляющая магнитного момента, присущая только работающей панели.
Таким образом, существуют несколько путей управления режимами работы ФАР для получения положительных или отрицательных собственных магнитных моментов, создаваемых всеми токовыми контурами ДОС ФАР КА, или получения условия их «магнитоуравновешенности».
На фиг. 4 представлена схема разгрузки СГ от накопленного кинетического момента с использованием ФАР. При этом введены обозначения: 1 - КА; 2 - панель ФАР; OXYZ - связанный базис КА, оси которого совпадают с главными центральными осями инерции;  - магнитный управляющий момент от ФАР;
- магнитный управляющий момент от ФАР;  - проекция вектора
- проекция вектора  , на направление вектора
, на направление вектора  , остальные обозначения соответствуют ранее введенным.
, остальные обозначения соответствуют ранее введенным.
Указанный на схеме управляющий момент  обеспечивает разгрузку СГ от накопленного кинетического момента, так как за счет тупого угла между векторами
обеспечивает разгрузку СГ от накопленного кинетического момента, так как за счет тупого угла между векторами  и
и  выполняется условие (2) для
выполняется условие (2) для  ,
,  . При этом
. При этом  .
.
Рассмотренный пример является частным случаем разгрузки СГ, поскольку вектор  , соответствующий одному из возможных режимов работы ФАР, может иметь и другие значения при выполнении условия (2) в p-x режимах работы ФАР. Следовательно, необходимо оценить каждый из возможных вариантов разгрузки СГ, для последующего выбора наиболее эффективного режима работы ФАР с точки зрения достижения поставленной цели разгрузки СГ, при сохранении основного функционального предназначения решетки.
, соответствующий одному из возможных режимов работы ФАР, может иметь и другие значения при выполнении условия (2) в p-x режимах работы ФАР. Следовательно, необходимо оценить каждый из возможных вариантов разгрузки СГ, для последующего выбора наиболее эффективного режима работы ФАР с точки зрения достижения поставленной цели разгрузки СГ, при сохранении основного функционального предназначения решетки.
Для этого определяют  режимы работы ФАР из конечного множества Р возможных режимов ее работы, при которых будет производиться разгрузка системы СГ от накопленного кинетического момента
режимы работы ФАР из конечного множества Р возможных режимов ее работы, при которых будет производиться разгрузка системы СГ от накопленного кинетического момента  исходя из выполнения условия (2). При этом определяют значение магнитного момента
исходя из выполнения условия (2). При этом определяют значение магнитного момента  ФАР в каждом
ФАР в каждом  режиме ее работы, а также значение
режиме ее работы, а также значение  при
при  . Далее по каждому вектору
. Далее по каждому вектору  определяют его проекцию на направление вектора
определяют его проекцию на направление вектора  по выражению (5). Из полученного множества
по выражению (5). Из полученного множества  ,
, 
 , определяют максимальное значение
, определяют максимальное значение  , по которому, в свою очередь, выбирают
, по которому, в свою очередь, выбирают  -й режим работы ФАР для разгрузки системы СГ от накопленного кинетического момента. Выбранное наибольшее из возможных значений проекций разгрузочного момента на направление вектора накопленного кинетического момента в системе СГ позволяет минимизировать продолжительность разгрузки и тем самым максимально эффективным образом достичь ее цели.
-й режим работы ФАР для разгрузки системы СГ от накопленного кинетического момента. Выбранное наибольшее из возможных значений проекций разгрузочного момента на направление вектора накопленного кинетического момента в системе СГ позволяет минимизировать продолжительность разгрузки и тем самым максимально эффективным образом достичь ее цели.
В процессе разгрузки СГ контролируют наличие накопленного кинетического момента, т.е.  , а также выполнение условия (6) отсутствия разгрузки с учетом использования управляющего магнитного момента с единичным вектором
, а также выполнение условия (6) отсутствия разгрузки с учетом использования управляющего магнитного момента с единичным вектором  , свойственного для
, свойственного для  -го режима работы ФАР.
-го режима работы ФАР.
Как следует из (6), разгрузка невозможна в случае, когда угол между векторами  и
и  становится прямым (см. фиг. 4). А в случае острого угла система СГ будет дополнительно нагружаться кинетическим моментом от действия на КА рассмотренного управляющего момента.
становится прямым (см. фиг. 4). А в случае острого угла система СГ будет дополнительно нагружаться кинетическим моментом от действия на КА рассмотренного управляющего момента.
В случае выполнения указанного условия (6), для обеспечения дальнейшей разгрузки, производят повторное формирование разгрузочного момента вышеуказанным образом. При этом значения магнитного момента ФАР определяется по выражению (4) для каждого р-го режима ее работы на момент времени выполнения условия (6).
Далее продолжают разгрузку СГ до ее завершения (получению значения  ). Формирование сигнала управления для разгрузки силовых гироскопов прекращают выбором одного из «магнитоуравновешенных» режимов работы ФАР, при котором Lp=0.
). Формирование сигнала управления для разгрузки силовых гироскопов прекращают выбором одного из «магнитоуравновешенных» режимов работы ФАР, при котором Lp=0.
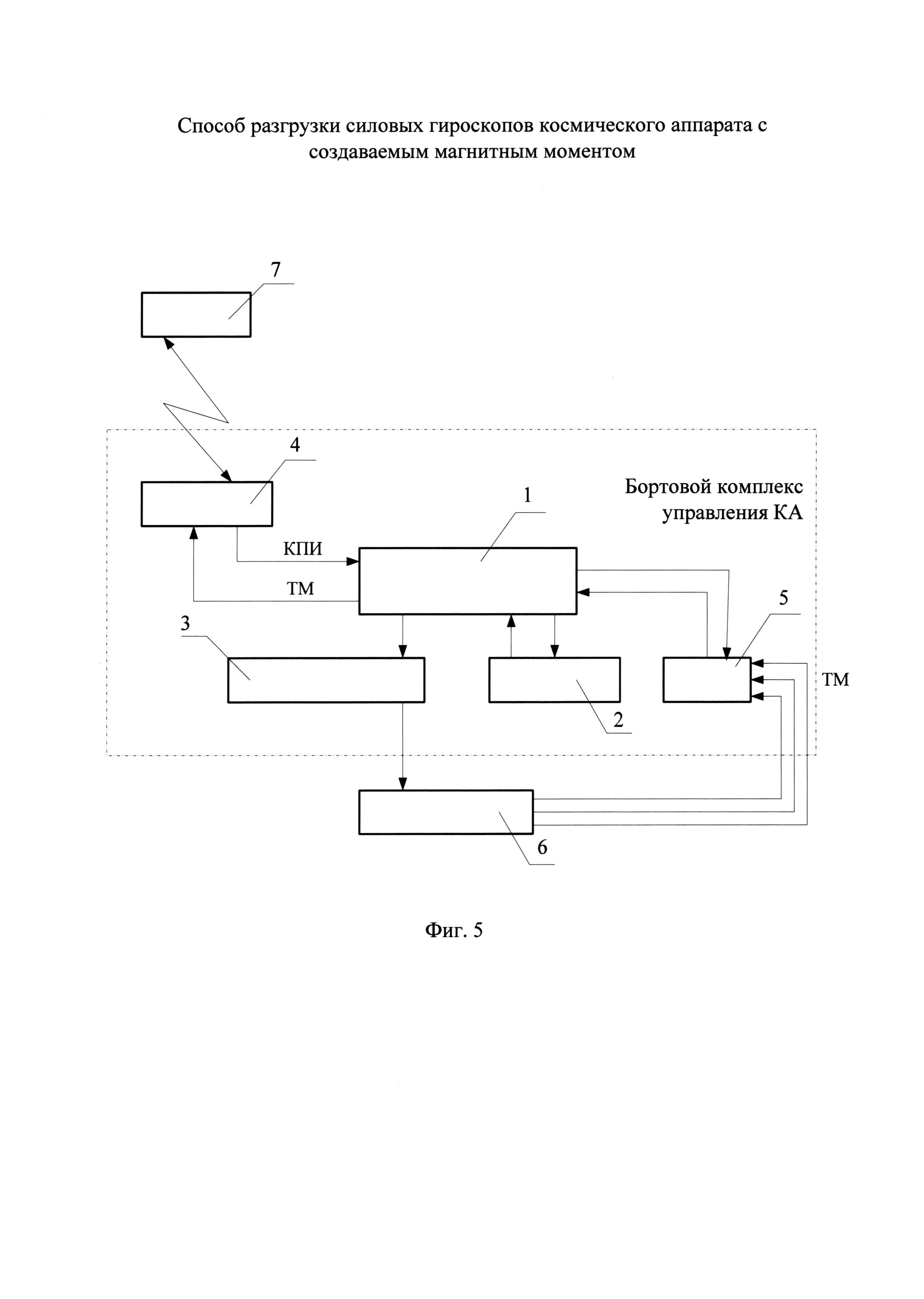
Реализация предложенного способа осуществляется на базе бортового комплекса управления (БКУ) КА, необходимый состав которого представлен на фиг. 5. БКУ представляет собой централизованно распределенную структуру бортовых систем:
1 - бортовая цифровая вычислительная система (БЦВС);
2 - система управления движением и навигации (СУДН);
3 - система управления бортовой аппаратурой (СУБА);
4 - бортовая аппаратура управления (БАУ) ФАР;
5 - система бортовых измерений (СБИ);
6 - бортовая аппаратура служебного канала управления (БА СКУ).
При этом первый выход БЦВС 1 соединен с входом СУДН 2, выход которой соединен с первым входом БЦВС 1. Второй выход БЦВС 1 соединен с входом СУБА 3, выход которой соединен с входом БАУ ФАР 4. Три выхода БАУ ФАР 4 подключены (многоканально) с тремя входами СБИ 5. Четвертый вход СБИ 5 подключен к третьему выходу БЦВС 1. А выход СБИ 5 подключен ко второму входу БЦВС 1. Четвертый выход БЦВС 1 подключен к входу БА СКУ 6. А выход указанной бортовой аппаратуры подключен к третьему входу БЦВС 1.
Кроме указанных обозначений на фиг. 5, дополнительно показан наземный комплекс управления (НКУ) КА (поз. 7), взаимодействующий с БА СКУ 6, направления передачи телеметрической (TM) и командно-программной информации (КПИ), а также информации оперативного контроля (ИОК). Интеграция перечисленных систем и бортовой аппаратуры в единый управляющий комплекс осуществляется средствами программного обеспечения (ПО) БКУ, размещаемого в цифровых вычислительных машинах и устройствах сопряжения БЦВС.
Для реализации предлагаемого способа ПО БКУ обеспечивает решение следующих задач (см. фиг. 5):
- расчет и управление ориентацией КА (поз. 1, 2);
- управление и контроль включения бортовых систем (поз. 1-6);
- прием, хранение, обработка и распределение КПИ, получаемой от НКУ (поз. 7).
При помощи алгоритмов БЦВС 1, обеспечивающих работу кинематического и динамического контуров СУДН 2 [1], производится построение и поддержание заданной ориентации. При этом в качестве исполнительных органов используются СГ [1], с каждого из которых передаются в БЦВС измеренные значения кинетического момента. По указанным измеренным значениям определяется значение вектора накопленного кинетического момента  в СГ. Далее алгоритмами БЦВС производится выбор режима работы ФАР, обеспечивающего разгрузку СГ от накопленного кинетического момента в соответствии с ранее описанной логикой формирования разгрузочного момента. Команда на выбор режима работы ФАР транслируется через СУБА 3 в БАУ ФАР 4. СУБА 3 осуществляет коммутацию и распределение электроэнергии потребителям, в том числе для БАУ ФАР 4. Кроме того, СУБА 3 осуществляет прием командной информации от БЦВС, производит ее преобразование, усиление и распределение по другим системам и бортовой аппаратуре КА. БА ФАР 4, в свою очередь, производит преобразование, усиление и распределение команд управления отдельными модулями ФАР.
в СГ. Далее алгоритмами БЦВС производится выбор режима работы ФАР, обеспечивающего разгрузку СГ от накопленного кинетического момента в соответствии с ранее описанной логикой формирования разгрузочного момента. Команда на выбор режима работы ФАР транслируется через СУБА 3 в БАУ ФАР 4. СУБА 3 осуществляет коммутацию и распределение электроэнергии потребителям, в том числе для БАУ ФАР 4. Кроме того, СУБА 3 осуществляет прием командной информации от БЦВС, производит ее преобразование, усиление и распределение по другим системам и бортовой аппаратуре КА. БА ФАР 4, в свою очередь, производит преобразование, усиление и распределение команд управления отдельными модулями ФАР.
О текущем состоянии ФАР информация с датчиков тока, установленных в преобразователях напряжения модулей, поступает в виде ТМ информации через СБИ 5 в БЦВС 1. При этом подключение измерительных каналов БАУ ФАР 4 в СБИ 5 или повторное подтверждение в виде команд управления на их использование производится из БЦВС 1 одновременно с выдачей команды в СУБА 3. По этой же команде формируется массив цифровой ИОК для передачи через БА СКУ 6 в приемные средства НКУ 7 о выборе режима работы ФАР. В НКУ 7 осуществляется контроль работы выбранных режимов ФАР как по ИОК с борта КА, так и по характеристикам радиосигнала при непосредственном приеме и передаче его в системе спутниковой связи определенного диапазона, обеспечиваемого работой активной ФАР.
По результатам контроля работы ФАР, а также работы СГ, в случае необходимости, командами управления с НКУ 7 через БА СКУ 6 с формированием КПИ, поступающей в БЦВС 1, режимы управления ФАР могут принудительно изменяться.
Оценим величину управляющего момента, создаваемого собственным магнитным моментами ФАР описанной выше конструкции. В соответствии с (3) определим для единичной ДОС модуля ФАР, представленного на фиг. 1, значение собственного магнитного момента в р-м режиме работы

Для первого модуля с числом ДОС z1=64 и второго модуля с числом ДОС z2=48 значения собственных магнитных моментов будут соответственно равны

Для одной панели ФАР (r=1), содержащей число модулей µ1=22 и µ2=16, в соответствии с (4), собственный магнитный момент равен

Перспективные КА могут содержать до 14 указанных панелей (r=14). Тогда максимальный собственный магнитный момент всей ФАР, при векторной однонаправленности моментов ДОС, будет равен

Далее, проведем оценку управляющего момента для КА, содержащего ФАР и находящегося на геостационарной орбите, где  . При этом в штатной ориентации КА векторы
. При этом в штатной ориентации КА векторы  и
и  взаимно перпендикулярны. Тогда управляющий момент МL будет равен
взаимно перпендикулярны. Тогда управляющий момент МL будет равен

Сравнительные оценки показали, что полученный магнитный управляющий момент больше чем на порядок величин при сравнении с гравитационным моментом и моментом от силы светового давления, действующих на один и тот же КА. Поскольку при штатной ориентации КА указанными моментами управлять сложно, то, формируя предложенным способом управляющий магнитный момент, можно парировать действие других моментов на КА, тем самым уменьшая нагрузку на систему СГ по кинетическому моменту. В конечном счете это приводит к экономии рабочего тела реактивных двигателей, применяемых для разгрузки СГ от накопленного кинетического момента [1].
Список литературы
1. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. Москва. «Наука». 1974.
2. Кирилин А.Н., Ахметов Р.Н., Соллогуб А.В., Макаров В.П. Методы обеспечения живучести низкоорбитальных автоматических КА зондирования Земли. Москва. «Машиностроение». 2010.
3. Патент RU 2030338 С1. МКИ В64G 1/28 / Ковтун В.С., Кузьмичев А.Ю., Платонов В.Н. Способ формирования разгрузочного момента для системы силовых гироскопов космического аппарата с солнечными батареями // Изобретения. 1995. №7.
4. Вендик О.Г., Парнес М.Д. Антенны с электронным движением луча. Под редакцией Л.Д. Бахраха. С.-Петербург, 2001.
Способ разгрузки силовых гироскопов космического аппарата с создаваемым магнитным моментом, включающий измерение текущего значения вектора накопленного кинетического момента в системе силовых гироскопов, измерение вектора индукции магнитного поля Земли , определение получаемого в результате взаимодействия магнитных моментов токовых контуров космического аппарата с магнитным полем Земли единичного вектора разгрузочного момента формирование сигнала управления на токовые контуры космического аппарата путем изменения величины и направления протекания тока для обеспечения условий разгрузки силовых гироскопов от накопленного кинетического момента где ,отличающийся тем, что предварительно в -х диаграммообразующих схемах, где , в каждом м режиме работы фазированной антенной решетки, где , измеряют значения токов в контурах питания и площадей контуров, а также определяют направления нормалей обхода токовых контуров, определяют магнитные моменты для каждого токового контура по магнитным моментам для каждого токового контура определяют значение магнитного момента фазированной антенной решетки в каждом -м режиме работы определяют значения единичных векторов разгрузочных моментов, создаваемых в результате взаимодействия магнитных моментов фазированной антенной решетки с магнитным полем Земли при , далее при выполнении условия разгрузки силовых гироскопов от накопленного кинетического момента, где , определяют режимы работы фазированной антенной решетки для проведения разгрузки системы силовых гироскопов от накопленного кинетического момента, определяют значения проекции вектора разгрузочного момента на направление вектора где , - значения векторов , для режимов работы фазированной антенной решетки, по максимальному значению определяют -й режим работы фазированной антенной решетки для разгрузки системы силовых гироскопов и в случае выполнения условия где - значение вектора для -го режима, производят повторное формирование разгрузочного момента путем изменения режима работы фазированной антенной решетки, а формирование сигнала управления для разгрузки силовых гироскопов прекращают при получении значения .


























Пневмопривод с тормозным устройством
Устройство и способ измерения плотности падающих тепловых потоков при тепловакуумных испытаниях космических аппаратов
Устройство для доставки объекта
Способ ориентирования перемещаемого в пилотируемом аппарате прибора и система для его осуществления
Способ получения цветного декоративного покрытия на технической ткани для эксплуатации в условиях космического пространства
Термокомпрессионное устройство
Центробежное рабочее колесо
Электронасосный агрегат
Способ формирования управляющих воздействий на космический аппарат
Устройство для отведения ядерной энергетической установки от приборно-агрегатного отсека космического аппарата
Фиксатор предметов в невесомости
Устройство фиксации предметов в невесомости
Разъемное соединение
Термокомпрессионное устройство
Шариковый замок
Способ прогнозирования работоспособности космонавта на поверхности планеты марс
Пневмопривод с тормозным устройством
Устройство и способ измерения плотности падающих тепловых потоков при тепловакуумных испытаниях космических аппаратов
Устройство для доставки объекта
Способ ориентирования перемещаемого в пилотируемом аппарате прибора и система для его осуществления

