Результат интеллектуальной деятельности: СИГНАЛ СПУТНИКОВОЙ НАВИГАЦИИ, СПОСОБ И УСТРОЙСТВО ДЛЯ ГЕНЕРАЦИИ ТАКОГО СИГНАЛА И СПОСОБ И УСТРОЙСТВО ДЛЯ ПРИЕМА ТАКОГО СИГНАЛА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к области спутниковой навигации, и, более конкретно к сигналу спутниковой навигации и к способу формирования, устройству формирования, способу приема и устройству приема такого сигнала.
Уровень техники
С развитием глобальной системы спутниковой навигации (Global Navigation Satellite System, GNSS) возрастают потребности в навигационных сервисах. Количество сигналов, передаваемых в одной полосе частот спутниковыми навигационными системами, растет, что увеличивает загруженность и без того ограниченной полосы частот, которую можно использовать для спутниковой навигации. С ростом количества сигналов, передаваемых навигационной системой в одной полосе частот, постоянно усложняется оборудование, устанавливаемое на спутнике.
Использование отдельных передающих антенн и усилителей для передачи сигналов различных сервисов в одной полосе частот повышает требования к конструкции антенны, увеличивает общую мощность, стоимость, количество оборудования, размещаемого на спутнике, предъявляет более высокие требования к качеству этого оборудования. По указанной причине желательно мультиплексировать несколько сигналов и использовать совместно общую несущую частоту. С учетом того, что мощность передачи со спутника ограничена, для обеспечения достаточной мощности приема на стороне приемника желательно, чтобы установленный на спутнике передатчик большой мощности имел как можно более высокую эффективность использования энергии. Поэтому нужно, чтобы усилитель большой мощности (High Power Amplifier, НРА) спутника работал в нелинейной области насыщения. Однако если при работе НРА вблизи точки насыщения огибающая входного сигнала не постоянна, то компоненты выходного сигнала будут подвергаться таким искажениям, как амплитудная модуляция, амплитудно-фазовое преобразование и т.п., что приведет к искажению амплитуд и фаз в передаваемом сигнале и значительно повлияет на качество работы приемной стороны. По указанной причине необходимо обеспечить постоянство огибающей комбинированного сигнала.
Были разработаны способы, относящиеся к мультиплексированию в сигнал с постоянной огибающей (Constant Envelope Multiplexing, СЕМ) нескольких сигналов с расширением спектра прямой последовательностью (direct-sequence spread spectrum, DSSS) на одной несущей частоте. Например, для формирования предназначенного для передачи сигнала QPSK ортогональные фазы одной несущей могут модулироваться двумя разными сигналами DSSS. На ранних этапах развития GPS таким образом мультиплексировались сигналы кода С/А и кода P(Y) в полосе L1. С увеличением количества сигналов потребовались несколько более сложные способы мультиплексирования, например, раскрытые в патенте США US 6430213, в патентной заявке США US 2002/0075907 A1, в патентной заявке США US 2011/0051783 А1 и т.д. Однако вышеупомянутые способы направлены на мультиплексирование нескольких компонентов сигнала на одной частоте.
Известные способы, например способ модуляции AltBOC с постоянной огибающей (патентная заявка США US 2006/0038716 A1), и способ модуляции AltBOC с разделением по времени (TD-AltBOC) (патентная публикация Китая No. CN 102209056 A) обеспечивают способ совместной СЕМ для сигналов DSSS на двух разных частотах, в котором, например, две группы сигналов BPSK-R(10) смодулированные на разнесенных на 30,69 МГц двух отдельных несущих частотах, комбинируются в сигнал с постоянной огибающей. Однако в способе модуляции AltBOC для предварительного формирования сигнала требуется таблица соответствия фаз, и для осуществления СЕМ используется поиск в этой таблице. Кроме того, в способе модуляции AltBOC мультиплексируемые компоненты сигнала DSSS должны иметь равную мощность. В TD-AltBOC, поскольку используется способ с разделением по времени, значительно снижается эффективность множественного доступа сигнала DSSS с другими расширяемыми сигналами в той же полосе частот. И в этом способе мультиплексируемые компоненты сигнала тоже должны иметь равную мощность. Эти технические ограничения сужают возможности применения способов AltBOC и TD-AltBOC. В области GNSS известно, что, поскольку основной целью использования сигнала GNSS является дальнометрия, при разработке структуры сигнала GNSS предпочитают выделять пилотному каналу большую мощность по сравнению с каналом данных, чтобы способствовать повышению точности и надежности измерений псевдодальности и автоподстройки фазы несущей. Кроме того, входящее в практику использование в компонентах сигнала различных сигналов для кодового расширения спектра (например, BPSK-R, ВОС с синусной фазой, ВОС с косинусной фазой, ТМВОС, QMBOC и т.д.) приводит к различной эффективности при обнаружении, автоподстройке и демодуляции данных на стороне приемника. Соответственно, существует потребность в предложении двухчастотного способа СЕМ для сигналов GNSS, имеющего более широкие возможности применения.
Раскрытие изобретения
Целью настоящего изобретения является предложение сигнала спутниковой навигации и способа формирования, устройства формирования, способа приема и устройства приема такого сигнала, которые могли бы, по меньшей мере частично, учесть недостатки вышеупомянутых известных способов.
Согласно одному аспекту настоящего изобретения предлагается устройство формирования сигнала спутниковой навигации, содержащее генератор сигнала основной полосы частот, служащий для формирования первого сигнала S1 основной полосы частот, второго сигнала S2 основной полосы частот, третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот; генератор мультиплексированного сигнала, служащий для задания амплитуды и фазы синфазного компонента основной полосы частот и амплитуды и фазы квадратурного компонента основной полосы частот сигнала, в который мультиплексированы первый сигнал S1 основной полосы частот, второй сигнал S2 основной полосы частот, третий сигнал S3 основной полосы частот и четвертый сигнал S4 основной полосы частот, с целью формирования мультиплексированного сигнала с постоянной огибающей; и модулятор, служащий для модуляции радиочастоты мультиплексированным сигналом с постоянной огибающей с целью формирования сигнала спутниковой навигации, причем первым сигналом S1 основной полосы частот и вторым сигналом S2 основной полосы частот модулирована первая несущая частота f1 с взаимно ортогональными фазами несущей, а третьим сигналом S3 основной полосы частот и четвертым сигналом S4 основной полосы частот модулирована вторая несущая частота f2 с взаимно ортогональными фазами несущей.
Согласно одному аспекту настоящего изобретения предлагается способ формирования сигнала спутниковой навигации, включающий формирование первого сигнала S1 основной полосы частот, второго сигнала S2 основной полосы частот, третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот; задание амплитуды и фазы синфазного компонента основной полосы частот и амплитуды и фазы квадратурного компонента основной полосы частот сигнала, в который мультиплексированы первый сигнал S1 основной полосы частот, второй сигнал S2 основной полосы частот, третий сигнал S3 основной полосы частот и четвертый сигнал S4 основной полосы частот, с целью формирования мультиплексированного сигнала с постоянной огибающей; и модуляцию радиочастоты мультиплексированным сигналом с постоянной огибающей с целью формирования сигнала спутниковой навигации, причем первым сигналом S1 основной полосы частот и вторым сигналом S2 основной полосы частот модулируют первую несущую частоту f1 с взаимно ортогональными фазами несущей, а третьим сигналом S3 основной полосы частот и четвертым сигналом S4 основной полосы частот модулируют вторую несущую частоту f2 с взаимно ортогональными фазами несущей.
Согласно одному аспекту настоящего изобретения предлагается сигнал спутниковой навигации, сформированный посредством вышеупомянутого способа формирования сигнала спутниковой навигации или вышеупомянутого устройства формирования сигнала спутниковой навигации.
Согласно одному аспекту настоящего изобретения предлагается оборудование, содержащее средства, выполненные с возможностью обработки вышеупомянутого сигнала спутниковой навигации или сигнала спутниковой навигации, сформированного с использованием вышеупомянутого способа формирования сигнала спутниковой навигации или вышеупомянутого устройства формирования сигнала спутниковой навигации.
Согласно одному аспекту настоящего изобретения предлагается устройство приема сигнала, служащее для приема вышеупомянутого сигнала спутниковой навигации или сигнала спутниковой навигации, сформированного посредством вышеупомянутого способа формирования сигнала спутниковой навигации или вышеупомянутого устройства формирования сигнала спутниковой навигации.
Согласно одному аспекту настоящего изобретения предлагается устройство приема сигнала, служащее для приема вышеупомянутого сигнала спутниковой навигации или сигнала спутниковой навигации, сформированного посредством вышеупомянутого способа формирования сигнала спутниковой навигации или вышеупомянутого устройства формирования сигнала спутниковой навигации, содержащее модуль приема, служащий для приема сигнала спутниковой навигации; модуль демодуляции, служащий для демодуляции компонента сигнала, которым модулирована первая несущая сигнала спутниковой навигации, принятого модулем приема, и для демодуляции компонента сигнала, которым модулирована вторая несущая сигнала спутниковой навигации, принятого модулем приема; и модуль обработки, служащий для получения первого сигнала S1 основной полосы частот и второго сигнала S2 основной полосы частот на основании компонента сигнала, которым модулирована первая несущая, демодулированного модулем демодуляции, и для получения третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот на основании компонента сигнала, которым модулирована вторая несущая, демодулированного модулем демодуляции.
Согласно одному аспекту настоящего изобретения предлагается способ приема сигнала, служащий для приема вышеупомянутого сигнала спутниковой навигации или сигнала спутниковой навигации, формируемого посредством вышеупомянутого способа формирования сигнала спутниковой навигации или вышеупомянутого устройства формирования сигнала спутниковой навигации, включающий прием сигнала спутниковой навигации; демодуляцию компонента сигнала, которым модулирована первая несущая принятого сигнала спутниковой навигации, с целью получения первого сигнала S1 основной полосы частот и второго сигнала S2 основной полосы частот; и демодуляцию компонента сигнала, которым модулирована вторая несущая принятого сигнала спутниковой навигации, с целью получения третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот.
Согласно одному аспекту настоящего изобретения предлагается устройство приема сигнала, служащее для приема вышеупомянутого сигнала спутниковой навигации или сигнала спутниковой навигации, формируемого посредством вышеупомянутого способа формирования сигнала спутниковой навигации или вышеупомянутого устройства формирования сигнала спутниковой навигации, содержащее модуль приема, служащий для приема сигнала спутниковой навигации; модуль демодуляции, служащий для демодуляции сигнала спутниковой навигации с целью получения синфазного компонента основной полосы частот и квадратурного компонента основной полосы частот мультиплексированного сигнала; и модуль обработки, служащий для получения первого сигнала S1 основной полосы частот, второго сигнала S2 основной полосы частот, третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот на основании амплитуды и фазы синфазного компонента основной полосы частот и амплитуды и фазы квадратурного компонента основной полосы частот мультиплексированного сигнала.
Согласно одному аспекту настоящего изобретения предлагается способ приема сигнала, служащий для приема вышеупомянутого сигнала спутниковой навигации или сигнала спутниковой навигации, формируемого посредством вышеупомянутого способа формирования сигнала спутниковой навигации или вышеупомянутого устройства формирования сигнала спутниковой навигации, включающий прием сигнала спутниковой навигации; демодуляцию сигнала спутниковой навигации с целью получения синфазного компонента основной полосы частот и квадратурного компонента основной полосы частот мультиплексированного сигнала; и получение первого сигнала S1 основной полосы частот, второго сигнала S2 основной полосы частот, третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот на основании амплитуды и фазы синфазного компонента основной полосы частот и амплитуды и фазы квадратурного компонента основной полосы частот мультиплексированного сигнала.
Согласно одному аспекту настоящего изобретения предлагается программа, содержащая исполняемые команды, предназначенные для осуществления вышеупомянутых способа, устройства, оборудования или для формирования вышеупомянутого сигнала спутниковой навигации.
Согласно одному аспекту настоящего изобретения предлагается машиночитаемое хранилище, служащее для хранения вышеупомянутой программы, содержащей исполняемые команды, предназначенные для осуществления вышеупомянутых способа, устройства, оборудования или для формирования вышеупомянутого сигнала спутниковой навигации.
Краткое описание чертежей
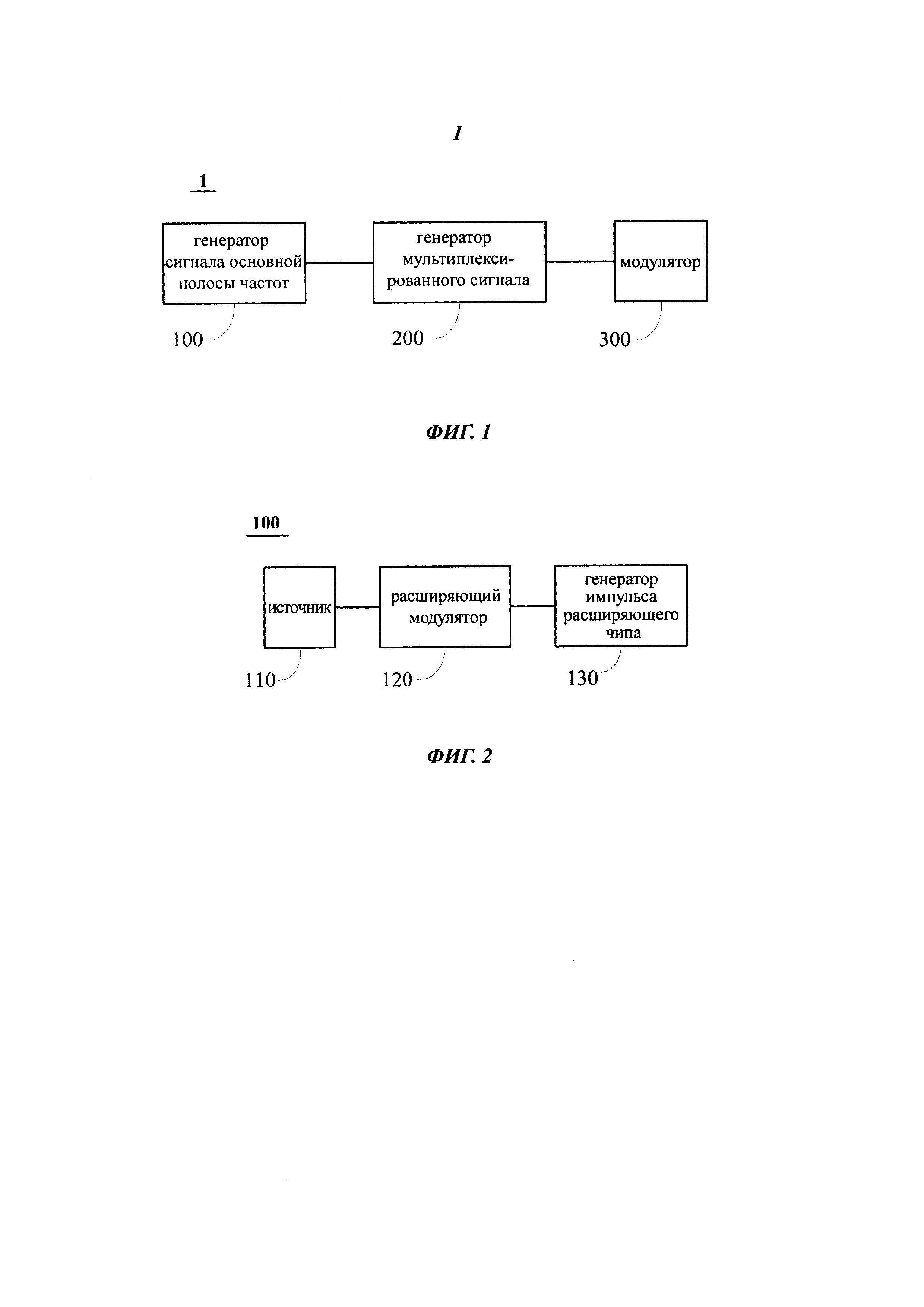
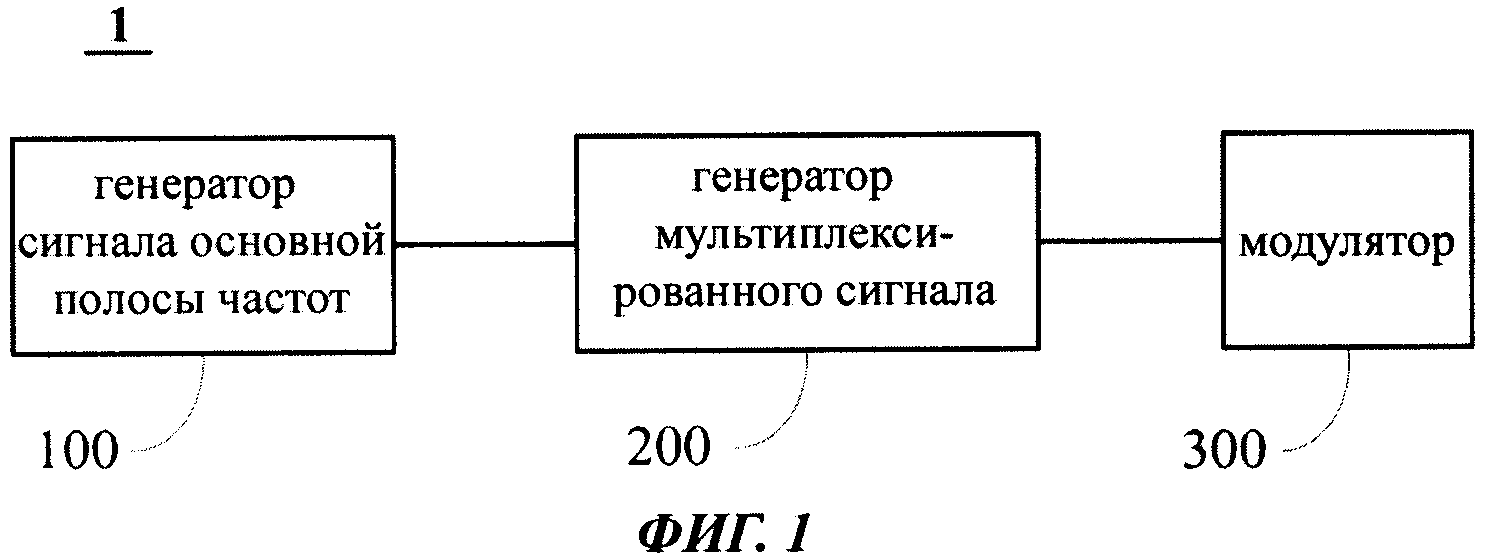
Фиг. 1 представляет функциональную схему устройства формирования сигнала спутниковой навигации в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 2 представляет функциональную схему генератора сигнала основной полосы частот в соответствии с вариантом осуществления настоящего изобретения.
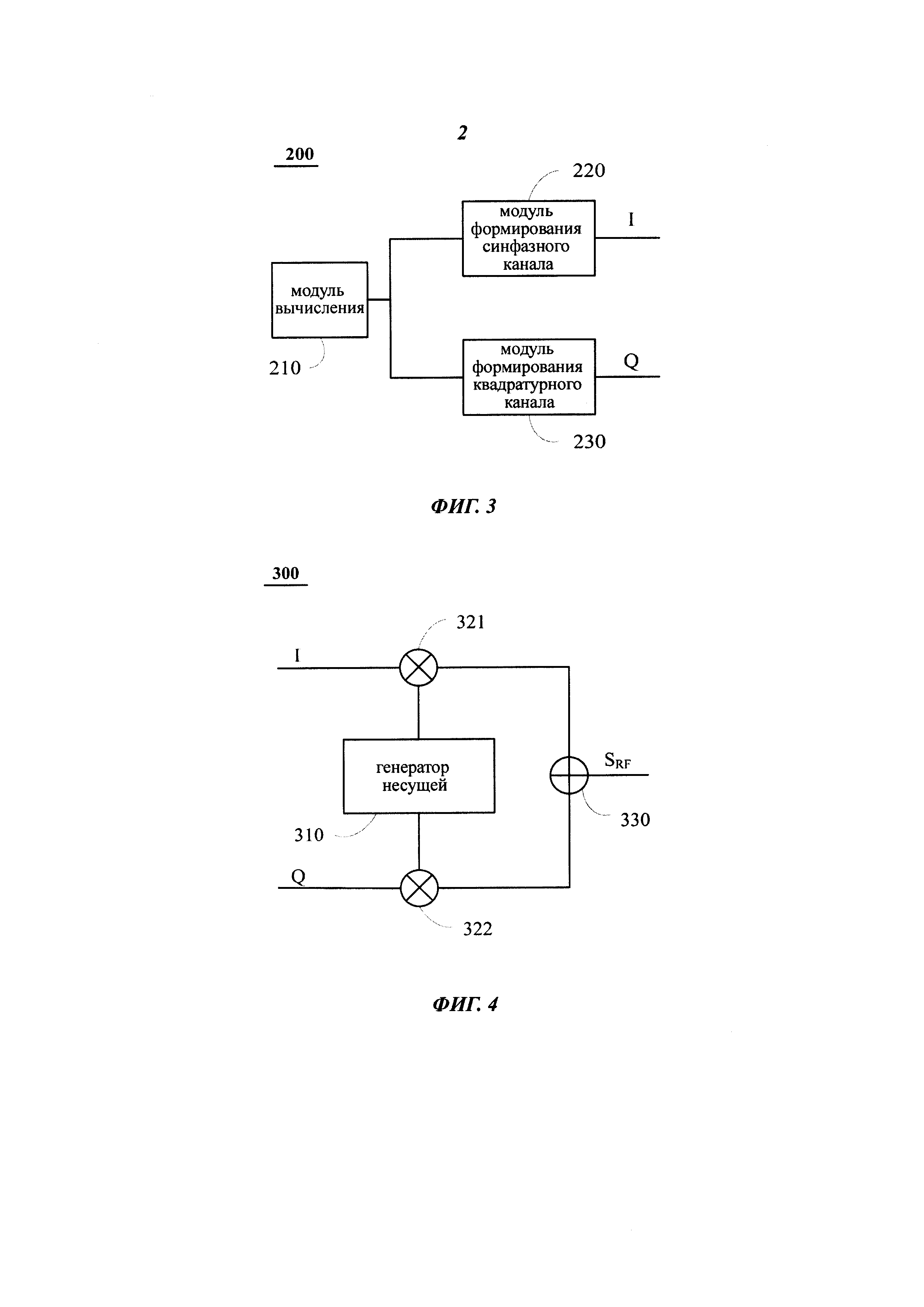
Фиг. 3 представляет функциональную схему генератора мультиплексированного сигнала в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 4 представляет функциональную схему модулятора в соответствии с вариантом осуществления настоящего изобретения.
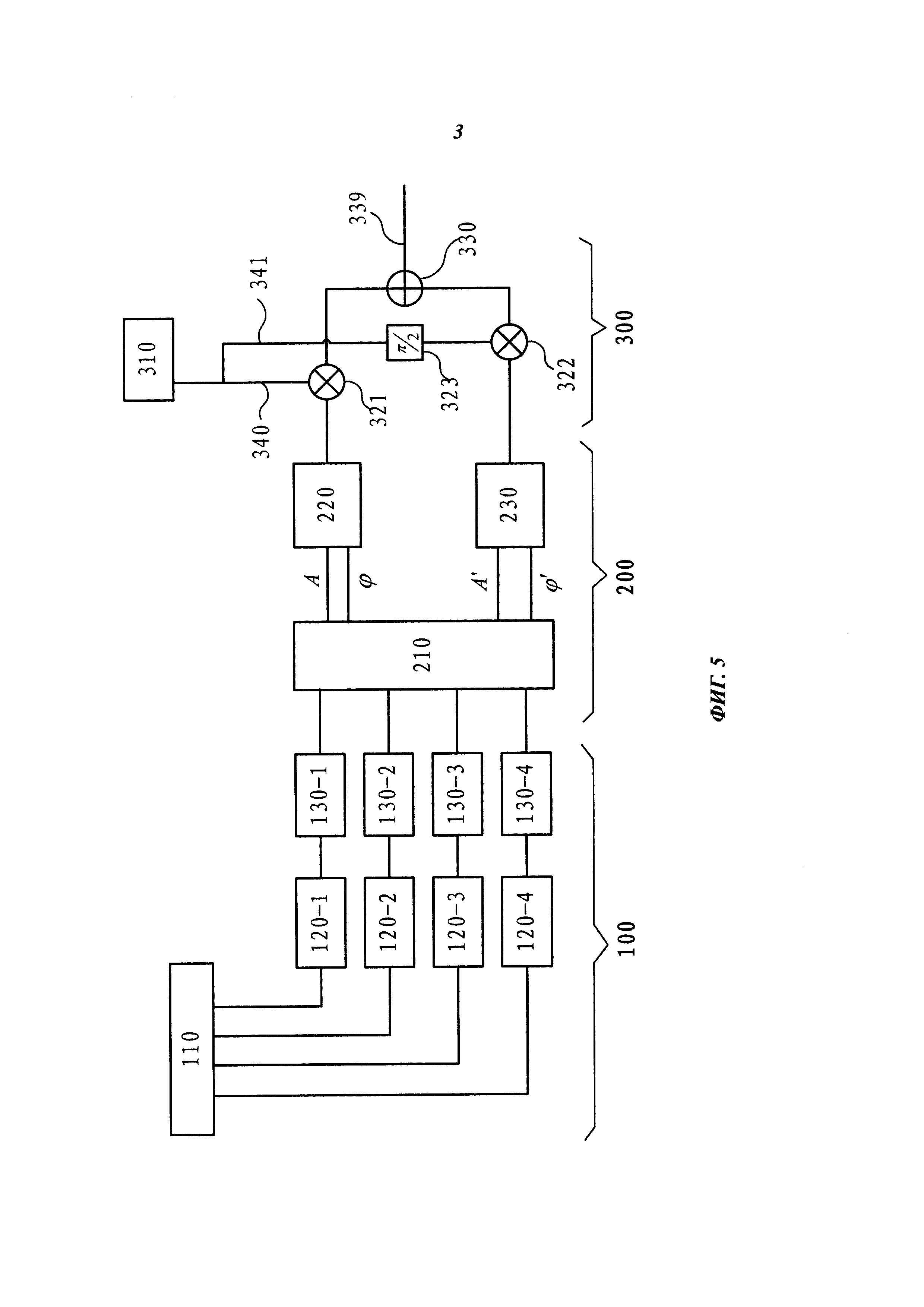
Фиг. 5 представляет схему реализации устройства формирования сигнала спутниковой навигации в соответствии с вариантом осуществления настоящего изобретения.
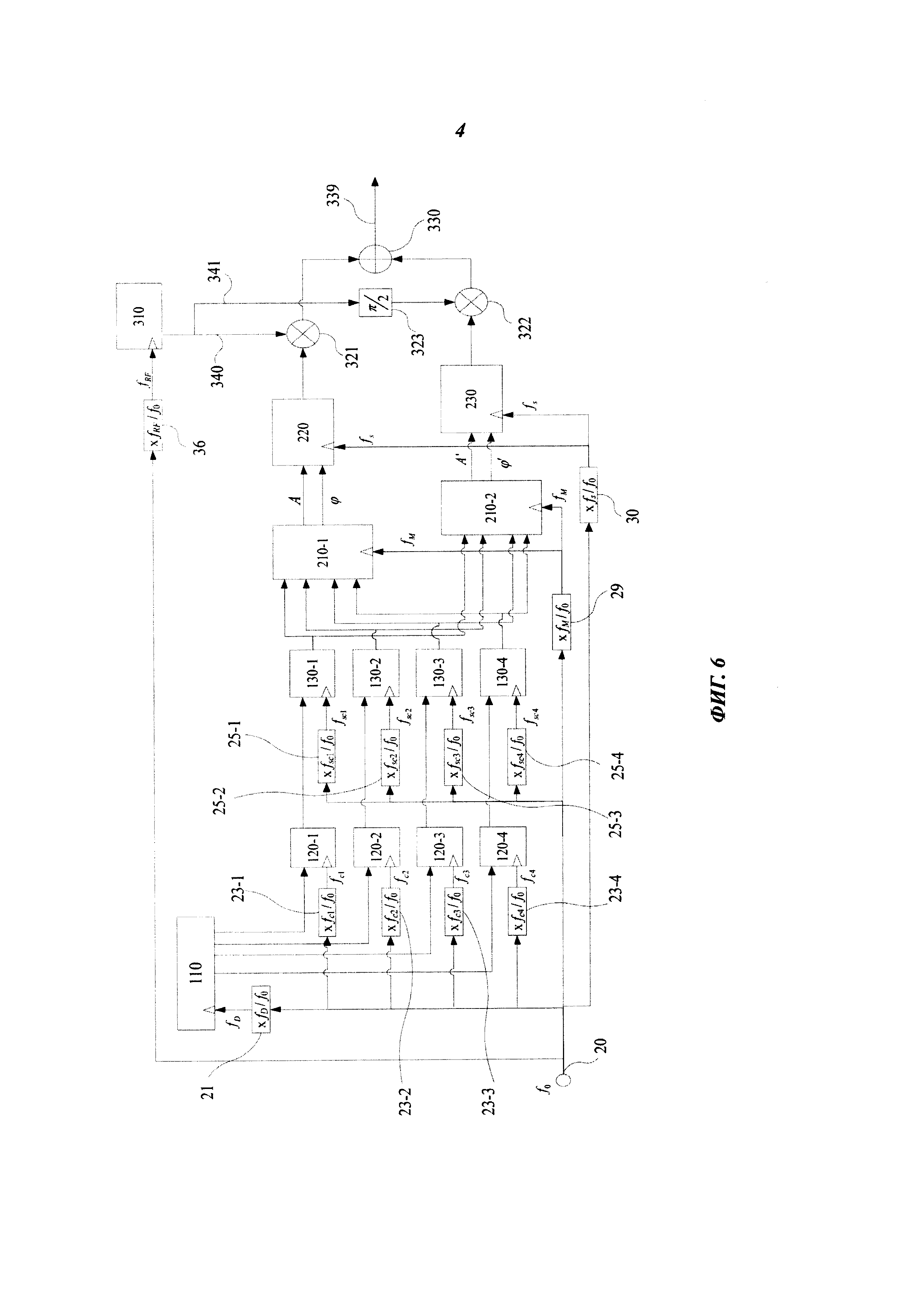
Фиг. 6 представляет схему еще одной реализации устройства формирования сигнала спутниковой навигации в соответствии с вариантом осуществления настоящего изобретения.
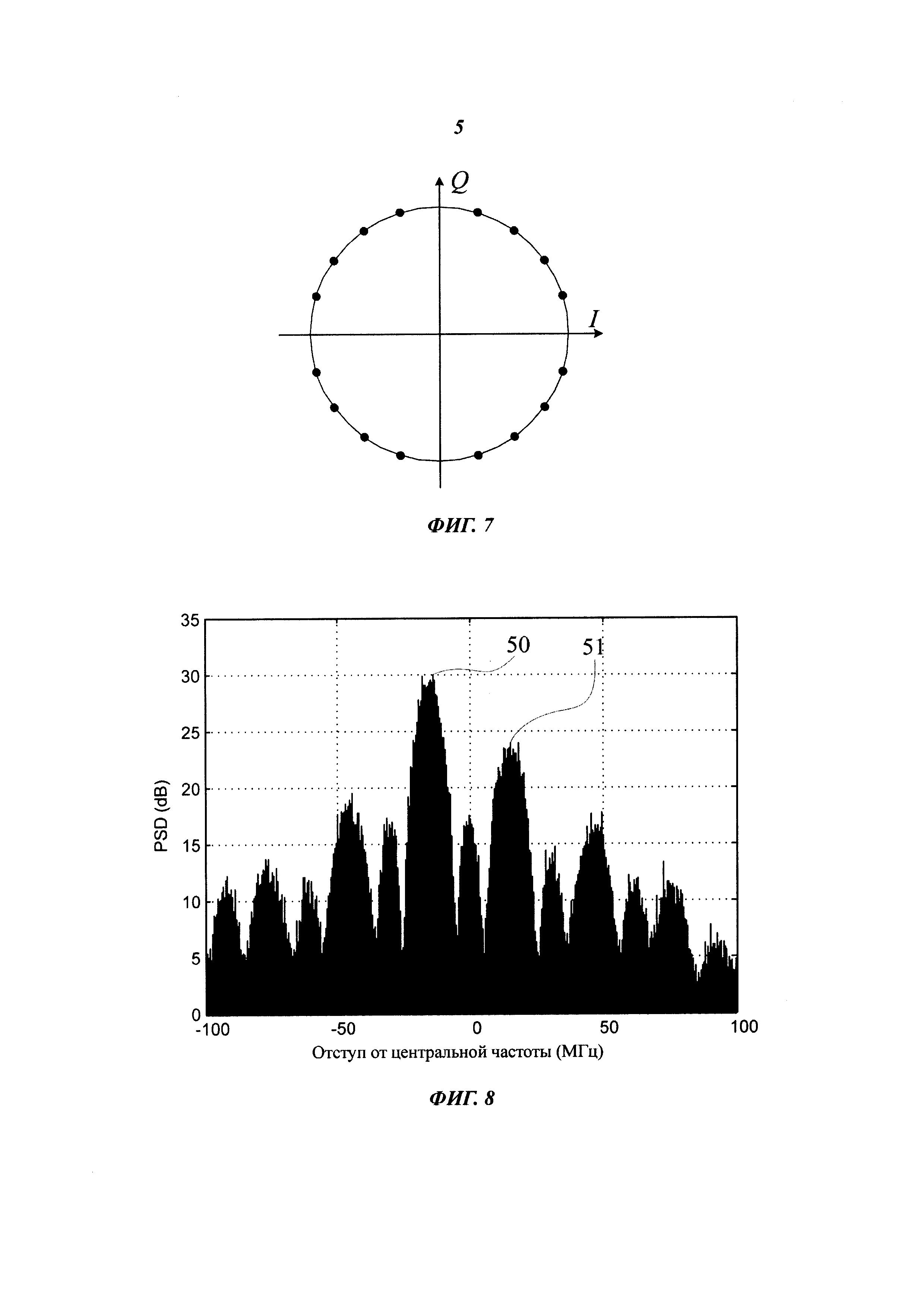
Фиг. 7 представляет сигнальное созвездие мультиплексированного сигнала основной полосы частот при отношении мощностей четырех компонентов сигнала составляющем с1:с2:с3:с4=1:2:3:8 в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 8 представляет спектральную плотность мощности мультиплексированного сигнала в соответствии с вариантом осуществления настоящего изобретения.
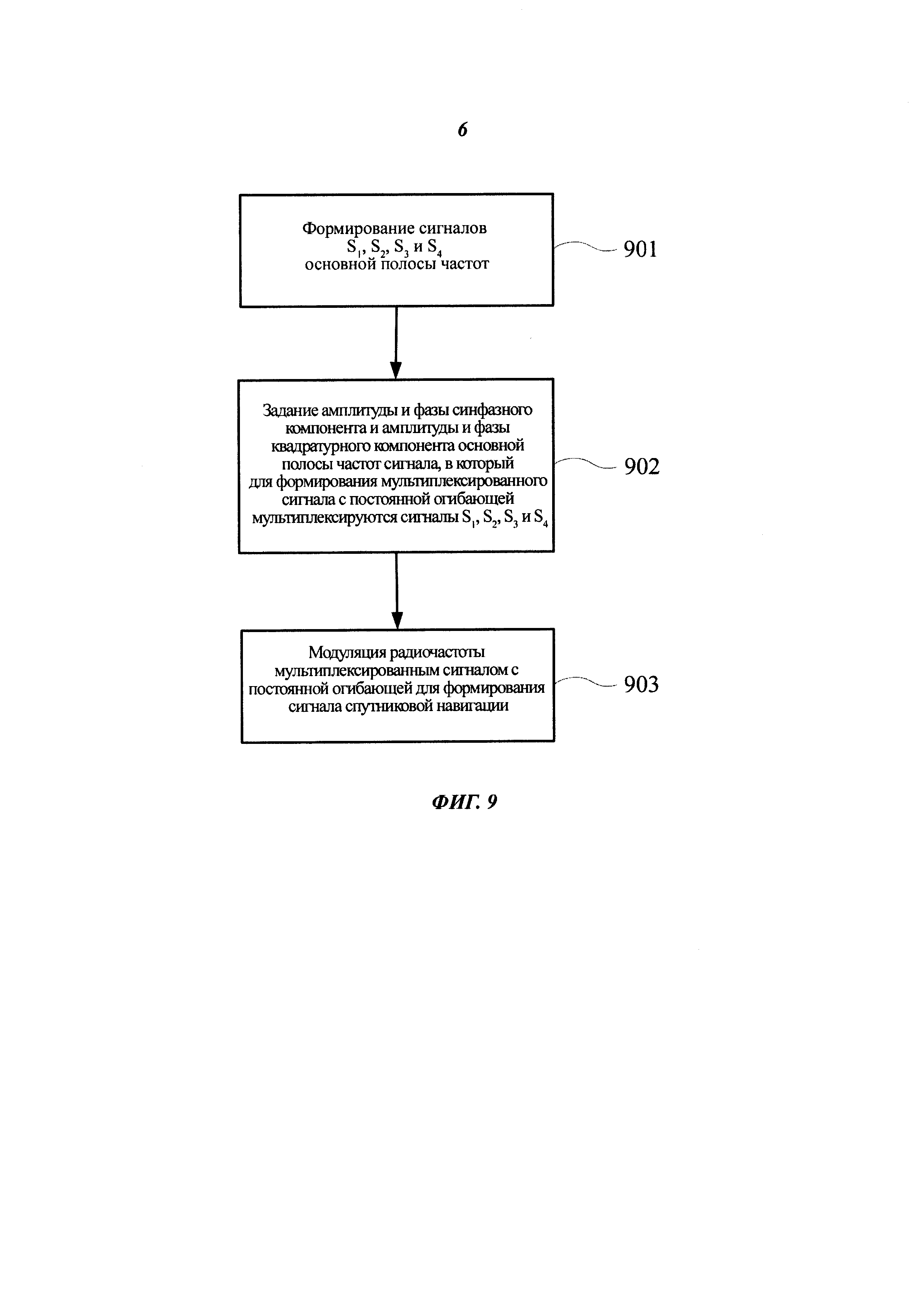
Фиг. 9 представляет схему последовательности операций способа формирования сигнала спутниковой навигации в соответствии с вариантом осуществления настоящего изобретения.
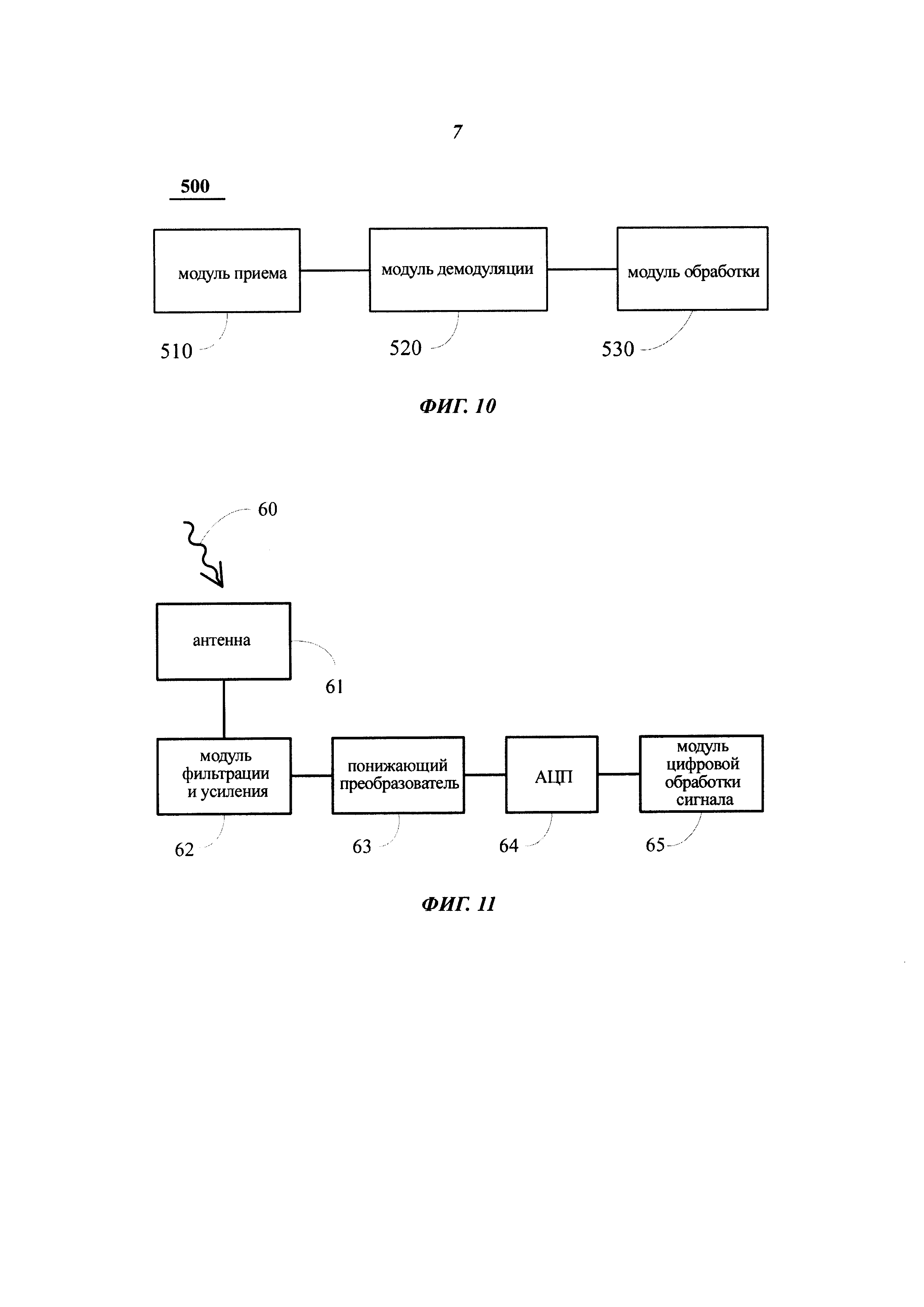
Фиг. 10 представляет функциональную схему устройства приема сигнала спутниковой навигации в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 11 представляет схему реализации устройства приема сигнала спутниковой навигации в соответствии с вариантом осуществления настоящего изобретения.
Осуществление изобретения
Далее со ссылкой на прилагаемые чертежи будет представлено подробное описание сигналов спутниковой навигации, способа формирования, устройства формирования, способа приема и устройства приема такого сигнала. С целью упрощения в настоящем раскрытии вариантов осуществления настоящего изобретения для одинаковых или подобных элементов используются одинаковые или подобные ссылочные обозначения.
Фиг. 1 представляет устройство 1 формирования сигнала спутниковой навигации в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 1, устройство 1 формирования сигнала содержит генератор 100 сигнала основной полосы частот, генератор 200 мультиплексированного сигнала и модулятор 300. Генератор 100 сигнала основной полосы частот формирует первый сигнал S1 основной полосы частот, второй сигнал S2 основной полосы частот, третий сигнал S3 основной полосы частот и четвертый сигнал S4 основной полосы частот. Генератор 200 мультиплексированного сигнала задает амплитуду и фазу синфазного компонента I(t) основной полосы частот и амплитуду и фазу квадратурного компонента Q(t) основной полосы частот мультиплексированного сигнала из первого сигнала S1 основной полосы частот, второго сигнала S2 основной полосы частот, третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот с целью формирования мультиплексированного сигнала с постоянной огибающей. Модулятор 300 мультиплексированным сигналом с постоянной огибающей модулирует радиочастоту с целью формирования сигнала спутниковой навигации. При этом первым сигналом S1 основной полосы частот и вторым сигналом S2 основной полосы частот модулируется первая несущая частота f1 с ортогональными фазами несущей, а третьим сигналом S3 основной полосы частот и четвертым сигналом S4 основной полосы частот модулируется вторая несущая частота f2 с ортогональными фазами несущей. Предлагаемое настоящим изобретением устройство формирования сигнала спутниковой навигации дает возможность осуществить мультиплексирование в сигнал с постоянной огибающей четырех компонентов сигнала (S1, S2, S3, S4) на двух частотах (f1, f2).
В соответствии с вариантом осуществления, имеется возможность задания параметров с1, с2, с3 и с4 мощности сигналов Si основной полосы частот в соответствии с действительными потребностями. Иными словами, сигналы основной полосы частот могут иметь различные параметры мощности. В соответствии с вариантом осуществления, параметром мощности может быть абсолютная мощность сигнала основной полосы частот, например, фактически используемая мощность передачи каждого сигнала основной полосы частот. В соответствии с еще одним вариантом осуществления, параметром мощности может быть относительная мощность сигнала основной полосы частот. Понятно, что абсолютная мощность сигнала меняется при прохождении различных устройств, например, усилителя. Например, при отношении мощностей с1:с2:с3:с4 сигналов основной полосы частот, составляющем 1:1:1:1, относительная мощность каждого из четырех сигналов основной полосы частот может быть равной 1. При отношении мощностей с1:с2:с3:с4 сигналов основной полосы частот, составляющем 1:3:1:3, относительные мощности четырех сигналов основной полосы частот могут быть равными, соответственно, 1, 3, 1 и 3. При этом в числе сигналов основной полосы частот, формируемых генератором 100 сигнала основной полосы частот, может быть один, два или три сигнала с параметром мощности, равным нулю.
Генератор 200 мультиплексированного сигнала может задавать амплитуду и фазу синфазного компонента основной полосы частот и амплитуду и фазу квадратурного компонента основной полосы частот мультиплексированного сигнала в соответствии с параметрами мощности сигналов основной полосы частот.
В соответствии с вариантом осуществления, сигнал основной полосы частот представляет собой сигнал со значением ±1. Генератор 200 мультиплексированного сигнала может задавать амплитуду и фазу синфазного компонента основной полосы частот и амплитуду и фазу квадратурного компонента основной полосы частот мультиплексированного сигнала в соответствии со значениями сигналов основной полосы частот.
Как показано на фиг. 2, в соответствии с вариантом осуществления генератор 100 сигнала основной полосы частот может содержать источник 110, расширяющий модулятор 120 и генератор 130 импульса расширяющего чипа.
Источник 110 формирует информацию, подлежащую широковещательной передаче, например, синхрослово, информацию о времени, эфемериды и т.п., необходимую для определения местоположения с использованием GNSS, и кодирует ее в битовый поток. Как должно быть понятно специалисту в данной области техники, для некоторых сигналов, предназначенных исключительно для целей дальнометрии, например, для пилотного канала в GNSS, допускается содержание в передаваемом битовом потоке только нулей или только единиц без передачи конкретной информации.
Расширяющий модулятор 120 модулирует битовый поток/информацию, сформированный источником, путем использования расширяющей последовательности, в результате чего получается расширяющая последовательность, модулированная навигационными сообщениями.
Генератор 130 импульса расширяющего чипа назначает импульс каждому биту расширяющей последовательности с навигационными сообщениями. Импульсом может быть прямоугольный импульс, импульс с возвратом к нулю, прямоугольная волна, символ с двоичным кодированием (Binary-Coded Symbol, BCS), широко используемый в GNSS, и т.п. Специалисту в данной области техники должно быть понятно, что импульсы расширяющего чипа, используемые в способах модуляции BPSK-R, ВОС, ТМВОС и т.п., являются частными примерами импульса BCS. Как будет видно, устройство формирования сигнала спутниковой навигации настоящего изобретения дает широкие возможности выбора импульса расширяющего чипа, используемого в компонентах сигнала основной полосы частот.
На выходе генератора 130 импульса расширяющего чипа получают сигнал основной полосы частот со значением ±1. Как должно быть понятно специалисту в данной области техники, амплитуда ±1 сигнала основной полосы частот не является ограничением, и любые увеличения или уменьшения амплитуды сигнала основной полосы частот не выходят за пределы охраны настоящего изобретения.
В соответствии с вариантом осуществления, генератор 200 мультиплексированного сигнала с целью формирования мультиплексированного сигнала с постоянной огибающей может вычислять амплитуду и фазу синфазного компонента I(t) основной полосы частот и амплитуду и фазу квадратурного компонента Q(t) основной полосы частот мультиплексированного сигнала на основании параметров мощности сигнала S1, S2, S3 и S4 основной полосы частот и значений сигнала S1, S2, S3 и S4 основной полосы частот.
Как показано на фиг. 3, генератор 200 мультиплексированного сигнала может содержать модуль 210 вычисления, модуль 220 формирования синфазного канала и модуль 230 формирования квадратурного канала.
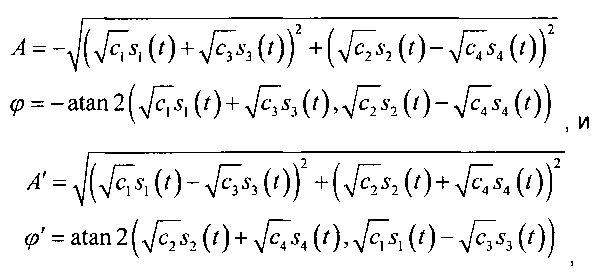
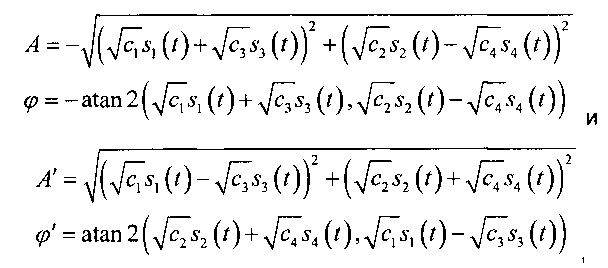
Модуль 210 вычисления вычисляет амплитуду A(t) и фазу φ(t) синфазного компонента I(t) основной полосы частот и амплитуду A′(t) и фазу φ′(t) квадратурного компонента Q(t) основной полосы частот на основании параметров мощности и на основании значения первого сигнала S1 основной полосы частот, второго сигнала S2 основной полосы частот, третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот.
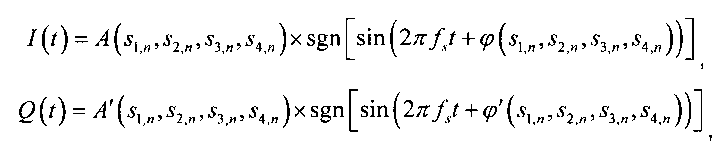
Модуль 220 формирования синфазного канала формирует синфазный компонент I(t) основной полосы частот на основании амплитуды A(t) и фазы φ(t), вычисленных модулем 210 вычисления, причем синфазный компонент I(t) основной полосы частот выражается как
I(t)=A(t)×sgn[sin(2πfst+φ(t))].
Модуль 230 формирования квадратурного канала формирует квадратурный компонент Q(t) основной полосы частот на основании амплитуды A′(t) и фазы φ′(t), вычисленных модулем 210 вычисления, причем квадратурный компонент Q(t) основной полосы частот выражается как
Q(t)=А′(t)×sgn[sin(2πfst+φ′(t))],
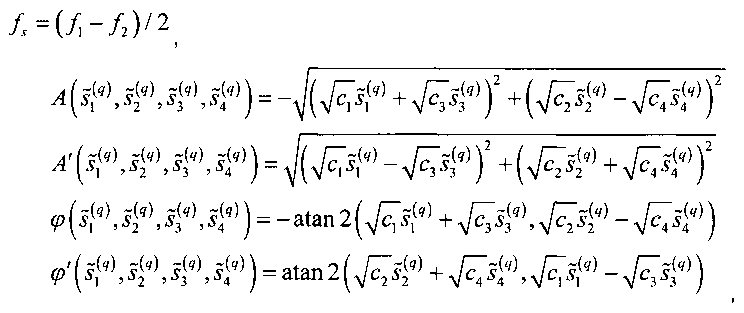
где fs=|f1-f2|/2, a sgn обозначает функцию знака, определяемую как

Как видно, в данном варианте осуществления изобретения синфазный компонент I(t) основной полосы частот представляет собой функцию прямоугольной волны с амплитудой A(t), квадратурный компонент Q(t) основной полосы частот представляет собой функцию прямоугольной волны с амплитудой A′(t), a частота прямоугольной волны равна fs=|f1-f2|/2.
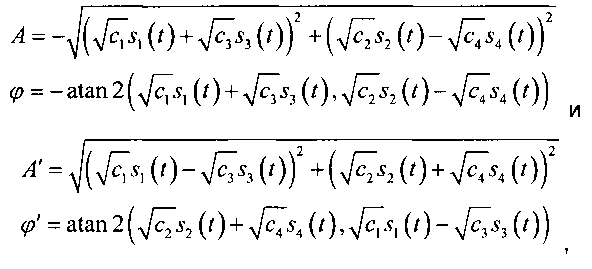
В соответствии с вариантом осуществления, модуль 210 вычисления вычисляет амплитуду A(t) и фазу φ(t) синфазного компонента I(t) основной полосы частот и амплитуду A′(t) и фазу φ′(t) квадратурного компонента Q(t) основной полосы частот мультиплексированного сигнала в соответствии со следующими формулами:

 и
и


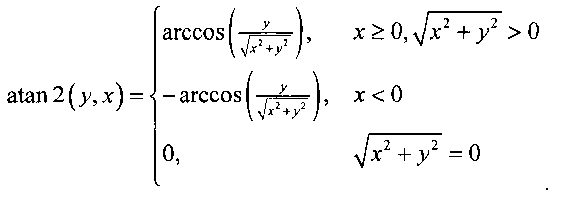
где si(t), i=1, 2, 3, 4, обозначает i-й сигнал основной полосы частот со значением ±1, сi обозначает параметр мощности i-го сигнала Si основной полосы частот, a atan2 обозначает функцию четырехквадрантного арктангенса:

Как должно быть понятно специалисту в данной области техники, исходя из временной области мультиплексированный сигнал, сформированный генератором 200 мультиплексированного сигнала, может быть выражен как S(t)=I(t)+jQ(t), где I(t) представляет собой синфазный компонент основной полосы частот мультиплексированного сигнала, a Q(t) представляет собой квадратурный компонент основной полосы частот мультиплексированного сигнала. Огибающая мультиплексированного сигнала равна  Если огибающая сигнала не зависит от времени, то такой сигнал называют сигналом с постоянной огибающей. В соответствии с вариантом осуществления настоящего изобретения с целью формирования мультиплексированного сигнала с постоянной огибающей амплитуда и фаза синфазного компонента I(t) основной полосы частот и амплитуда и фаза квадратурного компонента Q(t) основной полосы частот мультиплексированного сигнала вычисляются на основании параметров мощности сигналов Si (i=1, 2, 3, 4) основной полосы частот и значений сигналов Si основной полосы частот. В данном варианте осуществления
Если огибающая сигнала не зависит от времени, то такой сигнал называют сигналом с постоянной огибающей. В соответствии с вариантом осуществления настоящего изобретения с целью формирования мультиплексированного сигнала с постоянной огибающей амплитуда и фаза синфазного компонента I(t) основной полосы частот и амплитуда и фаза квадратурного компонента Q(t) основной полосы частот мультиплексированного сигнала вычисляются на основании параметров мощности сигналов Si (i=1, 2, 3, 4) основной полосы частот и значений сигналов Si основной полосы частот. В данном варианте осуществления  , то есть огибающая мультиплексированного сигнала не меняется во времени. Таким образом, мультиплексированный сигнал является мультиплексированным сигналом с постоянной огибающей. Как видно, в частотной области посредством генератора 200 мультиплексированного сигнала первым сигналом S1 основной полосы частот и вторым сигналом S2 основной полосы частот модулируется несущая частота fs с взаимно ортогональными фазами, а третьим сигналом S3 основной полосы частот и четвертым сигналом S4 основной полосы частот модулируется несущая частота -fs с взаимно ортогональными фазами.
, то есть огибающая мультиплексированного сигнала не меняется во времени. Таким образом, мультиплексированный сигнал является мультиплексированным сигналом с постоянной огибающей. Как видно, в частотной области посредством генератора 200 мультиплексированного сигнала первым сигналом S1 основной полосы частот и вторым сигналом S2 основной полосы частот модулируется несущая частота fs с взаимно ортогональными фазами, а третьим сигналом S3 основной полосы частот и четвертым сигналом S4 основной полосы частот модулируется несущая частота -fs с взаимно ортогональными фазами.
При этом параметры с1, с2, с3 и с4 мощности сигнала Si основной полосы частот могут задаваться в соответствии с действительной необходимостью. Иными словами, разные сигналы основной полосы частот могут иметь различные параметры мощности. При этом в числе сигналов основной полосы частот, формируемых генератором 110 сигнала основной полосы частот, может быть один, два или три сигнала с параметром мощности, равным нулю. Иными словами, любое одно, любые два или любые три значения с1, с2, с3 и с4 могут быть равны нулю.
В соответствии с вариантом осуществления настоящего изобретения модулятор 300 с целью формирования сигнала спутниковой навигации модулирует радиочастотную несущую мультиплексированным сигналом с постоянной огибающей.
Как показано на фиг. 4, модулятор 300 может содержать генератор 310 несущей, первый умножитель 321, второй умножитель 322 и сумматор 330. Модулятор 300 используется для модуляции радиочастоты мультиплексированным сигналом с постоянной огибающей, сформированным генератором 200 мультиплексированного сигнала, с целью последующей передачи. Генератор 310 несущей формирует несущую с центральной частотой fRF=(f1+f2)/2. С использованием первого умножителя 321 синфазный компонент I(t) основной полосы частот мультиплексированного сигнала, сформированного генератором 200 мультиплексированного сигнала, модулирует несущую с центральной частотой fRF, например, несущую cos(2πfRFt). С использованием второго умножителя 322 квадратурный компонент Q(t) основной полосы частот мультиплексированного сигнала, сформированного генератором 200 мультиплексированного сигнала, модулирует несущую с центральной частотой fRF, например, несущую sin(2πfRFt), фаза которой ортогональна фазе несущей, модулируемой первым умножителем 321. Выходы первого умножителя 321 и второго умножителя 322 передаются в сумматор 330 с целью получения сигнала SRF спутниковой навигации с постоянной огибающей, выражающегося как
SRF(t)=I(t)cos(2πfRFt)-Q(t)sin(2πfRFt).
Таким образом, сигнал SRF спутниковой навигации, передаваемый спутником, является сигналом спутниковой навигации с постоянной огибающей.
Фиг. 5 представляет конкретную реализацию устройства 1 формирования сигнала спутниковой навигации в соответствии с вариантом осуществления настоящего изобретения.
Как показано на фиг. 5, устройство 1 формирования сигнала содержит генератор 100 сигнала основной полосы частот, генератор 200 мультиплексированного сигнала и модулятор 300. Генератор 100 сигнала основной полосы частот может содержать источник 110, расширяющий модулятор 120 и генератор 130 импульса расширяющего чипа. Генератор 200 мультиплексированного сигнала может содержать модуль 210 вычисления, генератор 220 синфазного канала и генератор 230 квадратурного канала. Модулятор 300 может содержать генератор 310 несущей, первый умножитель 321, второй умножитель 322, схему 323 сдвига фазы на π/2 и сумматор 330.
Конкретно, источник 110 формирует четыре двоичных навигационных сообщения. Как будет понятно специалисту в данной области техники, при использовании пилотного канала в некоторых реализациях навигационное сообщение соответствующего канала содержит только нули или только единицы. Четыре навигационных сообщения передаются, соответственно, в расширяющий модулятор 120-1, 120-2, 120-3, 120-4 для модуляции с расширением спектра с получением четырех расширяющих последовательностей с навигационным сообщением. Расширяющие последовательности, модулированные навигационным сообщением, передаются в генератор 130-1, 130-2, 130-3, 130-4 импульса расширяющего чипа. В отношении входной расширяющей последовательности, модулированной навигационным сообщением, выполняется формирование импульса чипа, а результаты на выходе могут быть названы сигналами s1(t), s2(t), s3(t) и s4(t) основной полосы частот.
Модуль 210 вычисления принимает сигналы s1(t), s2(t), s3(t) и s4(t) основной полосы частот из генераторов 130-1, 130-2, 130-3, 130-4 импульса расширяющего чипа, а затем вычисляет амплитуду А и сдвиг фазы φ синфазного композитного сигнала основной полосы частот и амплитуду А′ и сдвиг фазы φ′ квадратурного композитного сигнала основной полосы частот на основании параметров мощности сигналов s1(t), s2(t), s3(t) и s4(t) основной полосы частот и текущих значений сигналов s1(t), s2(t), s3(t) и s4(t).
Параметрам мощности сигналов s1(t), s2(t), s3(t) и s4(t) основной полосы частот могут быть заданы любые значения в соответствии с действительными требованиями.
Правила вычисления могут быть выражены как

 и
и


Генератор 220 синфазного канала принимает амплитуду А(t) и сдвиг фазы φ(t) синфазного композитного сигнала основной полосы частот из модуля 210 вычисления и выдает синфазный компонент основной полосы частот мультиплексированного сигнала. Иными словами, выход генератора 220 синфазного канала может быть выражен как
I(t)=A(t)×sgn[sin(2πfst+φ(t))].
Генератор 230 квадратурного канала принимает амплитуду A′(t) и сдвиг фазы φ′(t) квадратурного композитного сигнала основной полосы частот из модуля 210 вычисления и выдает квадратурный компонент основной полосы частот мультиплексированного сигнала. Иными словами, выход генератора 230 квадратурного канала может быть выражен как
Q(t)=A′(t)×sgn[sin(2πfst+φ′(t))].
Генератор 310 несущей формирует сигнал несущей с частотой fRF, и сигнал несущей разделяется на две ветви. Сигнал несущей в первой ветви 340 и выход генератора 220 синфазного канала подаются в первый умножитель 321. Сигнал несущей во второй ветви 341 после прохождения схемы 323 сдвига фазы на π/2 превращается в сигнал несущей с фазой, ортогональной к фазе в ветви 340. Сигнал несущей во второй ветви 341 и выход генератора 230 синфазного канала подаются во второй умножитель 322. Выходы двух умножителей подаются в сумматор 330 с целью получения сигнала 339 спутниковой навигации с постоянной огибающей.
Фиг. 6 представляет еще одну конкретную реализацию устройства 1 формирования сигнала спутниковой навигации в соответствии с вариантом осуществления настоящего изобретения. В данной реализации с целью тактовой синхронизации ведущие таймеры модулей формируются путем деления или умножения таймера опорной частоты f0.
Как показано на фиг. 6, генератор 100 сигнала основной полосы частот может содержать таймер 20 опорной частоты, преобразователь 21 частоты, генератор 22 ведущего сообщения, преобразователь 23 частоты, расширяющий модулятор 24, преобразователь 25 частоты и генератор 26 импульса расширяющего чипа. Генератор 200 мультиплексированного сигнала может содержать селектор 27 состояния канала I, селектор 28 состояния канала Q, преобразователь 29 частоты, преобразователь 30 частоты, генератор 31 первого композитного сигнала и генератор 32 второго композитного сигнала. Модулятор 300 может содержать первый умножитель 33, второй умножитель 34, схему 35 сдвига фазы на π/2, преобразователь 36 частоты, генератор 37 первой несущей и первый сумматор 38.
Конкретно, таймер 20 опорной частоты посредством преобразователя 21 частоты преобразуется в ведущий таймер данных с частотой fD, которая тактирует генератор 22 сообщения с формированием четырех двоичных навигационных сообщений. Если в некоторых реализациях требуется пилотный канал, то навигационное сообщение соответствующего канала содержит только нули или только единицы. Таймер опорной частоты посредством преобразователя 23-1, 23-2, 23-3 и 23-4 частоты преобразуется в ведущий таймер с частотами fс1, fс2, fc3 и fс4, соответственно, которые тактируют расширяющий модулятор 24-1, 24-2, 24-3 и 24-4 с формированием четырех двоичных расширяющих последовательностей, имеющих частоту fс1, fс2, fс3 и fс4 кода расширения, соответственно. Частота кода расширения представляет собой положительное целое, кратное частоте fD.
Четыре навигационных сообщения, сформированных генератором 22 сообщения, передаются в расширяющий модулятор 24-1, 24-2, 24-3 и 24-4, соответственно, с целью выполнения сложения по модулю 2 с расширяющей последовательностью. Результаты сложения по модулю 2 передаются, соответственно, в генератор 26-1, 26-2, 26-3, 26-4 импульса расширяющего чипа. Генератор импульса расширяющего чипа тактируется ведущими таймерами поднесущих с частотой fsc1, fsc2, fsc3 и fsc4, которые формируются путем передачи таймера 20 в преобразователь частоты 25-1, 25-2, 25-3 и 25-4, соответственно. Генератор импульса расширяющего чипа выполняет назначение импульса чипа BCS для расширяющей последовательности, модулированной навигационным сообщением, и выход называют отдельными сигналами s1(t), s2(t), s3(t) и s4(t) основной полосы частот. Здесь fsc1=K1fc1, fsc2=K2fc2, fsc3=K3fc3, fsc4=K4fc4, a K1, K2, К3, K4 представляют собой целые числа, большие или равные 1.
Таймер 20 посредством преобразователя 29 частоты преобразуется в ведущий таймер с частотой fM, тактирующий селектор 27 состояния канала I и селектор 28 состояния канала Q. Частота fM больше, чем наименьшее общее кратное fк частот fsc1, fsc2, fsс3 и fsc4, a fM=Mfк, где М представляет собой положительное целое число. Гарантируется, что все моменты сдвига фазы значения si(t) (i=1, 2, 3, 4) синхронизированы с fM. В течение временного слота t∈[n/fM, (n+1)/fM] знак si,n∈{+1, -1} значения si(t) остается неизменным.
Сигналы s1(t), s2(t), s3(t) и s4(t) передаются в селектор 27 состояния канала I. Селектор 27 состояния вычисляет амплитуду А и сдвиг фазы φ канала I композитного сигнала основной полосы частот на основании параметров мощности и значений s1(t), s2(t), s3(t) и s4(t) в текущем временном слоте сигнала основной полосы частот. Правила вычисления могут быть выражены как:


Таймер 20 посредством преобразователя 30 частоты преобразуется в ведущий таймер с частотой fs, которая тактирует генератор 31 первого композитного сигнала с формированием поднесущей с прямоугольной волной с частотой fs. Амплитуда А и сдвиг фазы φ композитного сигнала из селектора 27 состояния канала I передаются в генератор 31 первого композитного сигнала с целью управления амплитудой и сдвигом фазы поднесущей с прямоугольной волной, сформированной генератором 31 первого композитного сигнала. Выход генератора 31 первого композитного сигнала может быть выражен как
I(t)=А×sgn[sin[2πfst+φ)].
Сигналы s1(t), s2(t), s3(t) и s4(t) передаются в селектор 28 состояния канала Q. Селектор 28 состояния вычисляет амплитуду А′ и сдвиг фазы φ′ канала Q композитного сигнала основной полосы частот на основании параметров мощности и значений s1(t), s2(t), s3(t) и s4(t) в текущем временном слоте сигнала основной полосы частот. Правила вычисления могут быть выражены как


Ведущий таймер с частотой fs тактирует генератор 32 второго композитного сигнала с формированием поднесущей с прямоугольной волной с частотой fs. Амплитуда A′ и сдвиг фазы φ′ композитного сигнала из селектора 28 состояния канала Q передаются в генератор 32 второго композитного сигнала с целью управления амплитудой и сдвигом фазы поднесущей с прямоугольной волной, сформированной генератором 32 второго композитного сигнала. Выход генератора 32 второго композитного сигнала может быть выражен как
Q(t)=A′×sgn[sin(2πfst+φ′)].
Опорный таймер 20 посредством преобразователя 36 частоты, преобразуется в ведущий таймер с частотой fRF, который тактирует генератор 37 первой несущей с формированием несущей с частотой fRF. Сигнал несущей разделяется на две ветви. Сигнал несущей в ветви 40 и выход генератора 31 первого композитного сигнала передаются в первый умножитель 33. Несущий сигнал в другой ветви 41 после прохождения через схему 35 сдвига фазы на π/2, превращается в сигнал несущей с фазой, ортогональной фазе в ветви 40. Сигнал несущей в другой ветви 41 и выход генератора 32 второго композитного сигнала передаются во второй умножитель 34. Выходы двух умножителей передаются в первый сумматор 38 с целью формирования сигнала 39 спутниковой навигации с постоянной огибающей.
Фиг. 7 представляет собой сигнальное созвездие Френеля для мультиплексированного сигнала основной полосы частот, в котором с1:с2:с3:с4=1:2:3:8. Как видно, мультиплексированный сигнал при таких условиях представляет собой сигнал 16-PSK, но точки созвездия распределены неравномерно. При других соотношениях с1:с2:с3:с4 количество точек созвездия и их распределение может отличаться от данного примера.
Фиг. 8 представляет спектральную плотность мощности (СПМ) мультиплексированного сигнала основной полосы частот с с1:с2:с3:с4=1:2:3:8, fс1=fс2=fс3=fс4=10.23 МГц, расширяющим импульсом в виде прямоугольного импульса (т.е. модуляция BPSK-R), примененным к каждому компоненту сигнала, и fs=15.345 МГц. В СПМ два компонента сигнала, использующих одну и ту же частоту, складываются и поэтому трудноразличимы. Однако в данном варианте осуществления мощность главного максимума 51 верхней боковой полосы с центральной частотой f1 примерно на 5,5 дБ меньше, чем мощность главного максимума 50 нижней боковой полосы с центральной частотой f2, что соответствует расчетному значению отношения полной мощности компонентов сигнала верхней боковой полосы к полной мощности компонентов сигнала нижней боковой полосы (с1+с2)/(с3+с4)=3/11 (-5,6 дБ). Таким образом, в соответствии с представленным в настоящем изобретении способе формирования сигнала спутниковой навигации имеется возможность мультиплексирования (СЕМ) четырех компонентов сигнала с разной мощностью в сигнал с постоянной огибающей.
Еще один аспект настоящего изобретения предлагает способ формирования сигнала спутниковой навигации. Согласно этому способу, имеется возможность осуществления СЕМ четырех компонентов сигнала (S1, S2, S3, S4) на двух частотах (f1, f2).
Фиг. 9 представляет схему последовательности операций способа формирования сигнала спутниковой навигации в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 9, на шаге 901 формируется первый сигнал S1 основной полосы частот, второй сигнал S2 основной полосы частот, третий сигнал S3 основной полосы частот и четвертый сигнал S4 основной полосы частот. На шаге 902 с целью формирования мультиплексированного сигнала с постоянной огибающей задаются амплитуда и фаза синфазного компонента основной полосы частот и амплитуда и фаза квадратурного компонента основной полосы частот сигнала, мультиплексированного из первого сигнала S1 основной полосы частот, второго сигнала S2 основной полосы частот, третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот. На шаге 903 мультиплексированным сигналом с постоянной огибающей модулируется радиочастота с целью формирования сигнала спутниковой навигации. При этом первым сигналом S1 основной полосы частот и вторым сигналом S2 основной полосы частот модулируется первая несущая частота f1 с взаимно ортогональными фазами несущей, а третьим сигналом S3 основной полосы частот и четвертым сигналом S4 основной полосы частот модулируется вторая несущая частота f2 с взаимно ортогональными фазами несущей.
В соответствии с вариантом осуществления, мощности с1, с2, с3 и с4 сигналов Si основной полосы частот могут задаваться в соответствии с действительными требованиями. На шаге 902 амплитуды и фазы синфазного компонента основной полосы частот и квадратурного компонента основной полосы частот мультиплексированного сигнала могут задаваться в соответствии с параметрами мощности сигналов основной полосы частот.
В соответствии с вариантом осуществления, на шаге 902 амплитуды и фазы синфазного компонента основной полосы частот и квадратурного компонента основной полосы частот мультиплексированного сигнала могут задаваться в соответствии со значениями сигналов основной полосы частот.
В соответствии с вариантом осуществления, на шаге 903 мультиплексированный сигнал с постоянной огибающей может модулировать несущую с центральной частотой fRF=(f1+f2)/2 с целью формирования сигнала спутниковой навигации.
В соответствии с вариантом осуществления настоящего изобретения способ формирования сигнала спутниковой навигации дополнительно включает: вычисление амплитуды A(t) и фазы φ(t) синфазного компонента I(t) основной полосы частот и вычисление амплитуды A′(t) и фазы φ′(t) квадратурного компонента Q(t) основной полосы частот на основании параметров мощности и значений первого сигнала S1 основной полосы частот, второго сигнала S2 основной полосы частот, третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот; формирование синфазного компонента I(t) основной полосы частот на основании вычисленных амплитуды A(t) и фазы φ(t), причем синфазный компонент I(t) основной полосы частот выражается как
I(t)=A(t)×sgn[sin(2πfst+φ(t))];
и формирование квадратурного компонента Q(t) основной полосы частот на основании вычисленных амплитуды A′(t) и фазы φ′(t), причем квадратурный компонент Q(t) основной полосы частот выражается как
Q(t)=A′(t)×sgn[sin(2πfst+φ′(t))],
где fs=|f1-f2|/2, a sgn обозначает функцию знака

В соответствии с вариантом осуществления настоящего изобретения способ формирования сигнала спутниковой навигации дополнительно включает вычисление амплитуды A(t) и фазы φ(t) синфазного компонента I(t) основной полосы частот и вычисление амплитуды A′(t) и фазы φ′(t) квадратурного компонента Q(t) основной полосы частот в соответствии со следующими формулами:

 и
и


где si(t), i=1, 2, 3, 4, обозначает i-й сигнал Si основной полосы частот, сi обозначает параметры мощности i-го сигнала Si основной полосы частот, a atan2 обозначает функцию четырехквадрантного арктангенса:

Хотя варианты осуществления и конкретные реализации способа формирования и устройства формирования сигнала спутниковой навигации описываются, как это сделано выше, со ссылкой на чертежи, следует понимать, что они представлены лишь в качестве примера, а не ограничения. Специалисту в данной области техники будет понятно, что в настоящее изобретение без выхода за пределы его сущности и объема могут быть внесены разнообразные изменения в форме и деталях.
В вышеописанных вариантах осуществления настоящего изобретения основное внимание уделено передающей стороне, то есть способам формирования сигнала спутниковой навигации и устройствам формирования такого сигнала. Кроме того, варианты осуществления настоящего изобретения также относятся к сигналам, формируемым посредством способов формирования сигнала спутниковой навигации, и к устройствам формирования такого сигнала, например, таким, как описаны выше.
Кроме того, специалисту в данной области техники должно быть понятно, что для приема и обработки сигналов, сформированных посредством вышеприведенного способа формирования сигнала спутниковой навигации и устройств формирования, необходимы система, способ, устройство и приемник с обратными функциями. Поэтому варианты осуществления настоящего изобретения также относятся к системам, способам, аппаратам и устройствам приема, используемым для обработки сигналов спутниковой навигации, например, таких, как описано выше.
В соответствии с вариантом осуществления настоящего изобретения предлагается устройство приема сигнала спутниковой навигации, служащее для приема сигнала спутниковой навигации, сформированного вышеописанными способами формирования сигнала спутниковой навигации или устройствами формирования указанного сигнала. В данном варианте осуществления могут быть обработаны компоненты сигнала, которыми модулирована первая несущая и вторая несущая, соответственно. Как показано на фиг. 10, устройство 500 приема сигнала содержит модуль 510 приема, модуль 520 демодуляции и модуль 530 обработки. Здесь модуль 510 приема принимает сигнал спутниковой навигации; модуль 521 демодуляции демодулирует компонент сигнала, которым модулирована первая несущая принятого сигнала спутниковой навигации, и демодулирует компонент сигнала, которым модулирована вторая несущая принятого сигнала спутниковой навигации; а модуль 530 обработки получает первый сигнал S1 основной полосы частот и второй сигнал S2 основной полосы частот на основании демодулированного модулем демодуляции компонента сигнала, которым модулирована первая несущая, и получает третий сигнал S3 основной полосы частот и четвертый сигнал S4 основной полосы частот на основании демодулированного модулем демодуляции компонента сигнала, которым модулирована вторая несущая.
Фиг. 11 представляет схему конкретной реализации устройства приема сигнала спутниковой навигации в соответствии с вариантом осуществления настоящего изобретения. В соответствии с данным вариантом осуществления, модуль 510 приема может содержать антенну 61; модуль 520 демодуляции может содержать модуль 62 фильтрации и усиления, понижающий преобразователь 63 и аналого-цифровой преобразователь (АЦП) 64; а модуль 530 обработки может содержать модуль 65 цифровой обработки сигнала.
Как видно из фиг. 11, когда компоненты сигнала принимаются по отдельности, сигнал 60 спутниковой навигации принимается из антенны 61. Сигнал 60 спутниковой навигации, принятый антенной 61, передается в модуль 62 фильтрации и усиления, где сигнал 60 спутниковой навигации фильтруется с целью подавления интенсивных сигналов помехи (интерференции) и внеполосных шумов, после чего сигнал 60 спутниковой навигации усиливается. При обработке компонента сигнала верхней боковой полосы, s1(t) или s2(t), центральная частота модуля фильтрации задается близкой к f1, а полоса пропускания большей или равной полосе компонента s1(t) или s2(t) сигнала, подлежащего приему, чтобы обеспечить прохождение достаточной мощности компонента s1(t) или s2(t) сигнала через модуль фильтрации; аналогично, при обработке компонента сигнала верхней боковой полосы, s3(t) или s4(t), центральная частота фильтра задается близкой к f2, а полоса пропускания большей или равной полосе компонента s3(t) или s4(t) сигнала, подлежащего приему, чтобы обеспечить прохождение достаточной мощности компонента s3(t) или s4(t) сигнала через модуль фильтрации.
Отфильтрованный и усиленный сигнал из модуля 62 фильтрации и усиления передается в понижающий преобразователь 63 с целью преобразования несущей частоты компонента сигнала в соответствующую промежуточную частоту (ПЧ); затем сигнал передается в АЦП 64 для дискретизации и квантования сигнала, в результате чего получают цифровой сигнал ПЧ.
Цифровой сигнал ПЧ из АЦП 64 передается в модуль 65 цифровой обработки сигнала. Данный модуль может быть осуществлен посредством FPGA, ASIC, универсального вычислительного модуля или посредством комбинации указанных устройств с возможностью выполнения соответствующих операций обнаружения, автоподстройки, демодуляции над компонентом сигнала основной полосы частот, подлежащим обработке.
Кроме того, в соответствии с вариантом осуществления настоящего изобретения предлагается способ приема сигнала спутниковой навигации, служащий для приема сигнала спутниковой навигации, сформированного посредством вышеописанного способа формирования сигнала спутниковой навигации или устройства формирования такого сигнала. Способ приема сигнала включает прием сигнала спутниковой навигации; демодуляцию компонента сигнала, которым модулирована первая несущая принятого сигнала спутниковой навигации, с целью получения первого сигнала S1 основной полосы частот и второго сигнала S2 основной полосы частот; и демодуляцию компонента сигнала, которым модулирована вторая несущая принятого сигнала спутниковой навигации, с целью получения третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот.
В соответствии с вариантом осуществления настоящего изобретения предлагается устройство приема сигнала спутниковой навигации, служащее для приема сигнала спутниковой навигации, сформированного посредством вышеописанного способа формирования сигнала спутниковой навигации или устройства формирования такого сигнала. В данном варианте осуществления принятый сигнал спутниковой навигации с центральной частотой (f1+f2)/2 может обрабатываться как целое. Как показано на фиг. 10, устройство 500 приема сигнала содержит модуль 510 приема, модуль 520 демодуляции и модуль 530 обработки. При этом модуль 510 приема принимает сигнал спутниковой навигации, модуль 520 демодуляции демодулирует сигнал спутниковой навигации с целью получения синфазного компонента основной полосы частот и квадратурного компонента основной полосы частот мультиплексированного сигнала, а модуль 530 обработки получает первый сигнал S1 основной полосы частот, второй сигнал S2 основной полосы частот, третий сигнал S3 основной полосы частот и четвертый сигнал S4 основной полосы частот на основании амплитуды и фазы синфазного компонента основной полосы частот и амплитуды и фазы квадратурного компонента основной полосы частот мультиплексированного сигнала.
Как можно видеть, поскольку значение сигнала основной полосы частот равно ±1, комбинация четырех значений сигнала основной полосы частот, [S1, S2, S3, S4], может иметь вплоть до 16 комбинационных состояний. Модуль 530 обработки может для местной копии синфазного и квадратурного компонента основной полосы частот, соответствующей каждому из 16 комбинационных состояний, вычислять корреляцию между местной копией синфазного и квадратурного компонента основной полосы частот и синфазным и квадратурным компонентом основной полосы частот, полученным из модуля 540 демодуляции, с целью определения значений принятых первого сигнала S1 основной полосы частот, второго сигнала S2 основной полосы частот, третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот.
Возвращаясь к фиг. 11, когда мультиплексированный сигнал принимается и обрабатывается как целое, сигнал 60 спутниковой навигации принимается из антенны 61 в приемнике. Принятый сигнал 60 спутниковой навигации из антенны 61 передается в модуль 62 фильтрации и усиления для фильтрации сигнала 60 спутниковой навигации с целью подавления интенсивных сигналов помехи и внеполосных шумов и с целью усиления сигнала 60 спутниковой навигации. Центральная частота модуля фильтрации задается близкой к (f1+f2)/2, а ширина полосы большей или равной 2fs, чтобы обеспечить прохождение достаточной мощности целостного комбинированного сигнала через модуль фильтрации. Если конструкция модуля фильтрации позволяет, рекомендуется обеспечить прохождение первого главного максимума спектральной мощности каждого компонента сигнала через модуль фильтрации.
Отфильтрованный и усиленный сигнал из модуля 62 фильтрации и усиления передается в понижающий преобразователь 63 для преобразования несущей частоты компонента сигнала в промежуточную частоту (ПЧ); затем сигнал передается в АЦП 64 для дискретизации и квантования сигнала с целью получения цифрового сигнала ПЧ.
Цифровой сигнал ПЧ из АЦП 64 передается в модуль 65 цифровой обработки сигнала. Данный модуль может быть осуществлен посредством FPGA, ASIC, универсального вычислительного модуля или посредством комбинации указанных устройств. Цифровой сигнал ПЧ умножается на синфазную несущую и квадратурную несущую, сформированные приемником, для удаления из цифрового сигнала промежуточной частоты и устранения эффекта Доплера, с целью получения синфазного сигнала SI(t) основной полосы частот приемника и квадратурного сигнала SQ(t) основной полосы частот приемника.
Модуль 65 цифровой обработки сигнала выполнен с возможностью формирования расширяющих последовательностей четырех компонентов сигнала с назначением импульса расширяющего чипа. Модуль 65 цифровой обработки сигнала для каждой комбинации в соответствии со всеми возможными комбинациями значений двоичной местной копии сигнала основной полосы частот четырех компонентов сигнала в каждом периоде дискретизации формирует местную копию Ĩi(t) синфазного импульса основной полосы частот и местную копию  квадратурного импульса основной полосы частот. Общее количество комбинаций значений обозначено как g. Можно показать, что если с каналами данных связаны N компонентов сигнала, то g=2N. Для частного случая из g комбинаций значений
квадратурного импульса основной полосы частот. Общее количество комбинаций значений обозначено как g. Можно показать, что если с каналами данных связаны N компонентов сигнала, то g=2N. Для частного случая из g комбинаций значений  правилом формирования
правилом формирования  ,
и является
,
и является


где



 .
.
i-я (i=1, 2, …, g) группа местной копии
синфазного импульса основной полосы частот умножается на синфазный сигнал SI(t) основной полосы частот приемника и на квадратурный сигнал SQ(t) основной полосы частот приемника, соответственно, и результаты передаются в интегрирующий фильтр со сбросом с целью когерентного интегрирования длительностью TI, после чего получается i-я (i=1, 2, …, g) группа первых синфазного значения corr1Ii корреляции и квадратурного значения corr1Qi корреляции; аналогично, каждая группа местной копии
квадратурного импульса основной полосы частот умножается на синфазный сигнал SI(t) основной полосы частот приемника и на квадратурный сигнал SQ(t) основной полосы частот приемника, соответственно, и результаты передаются в интегрирующий фильтр со сбросом с целью когерентного интегрирования длительностью TI, после чего получатся i-я (i=1, 2, …, g) группа вторых синфазного значения corr2Ii, корреляции и квадратурного значения corr2Qi корреляции.
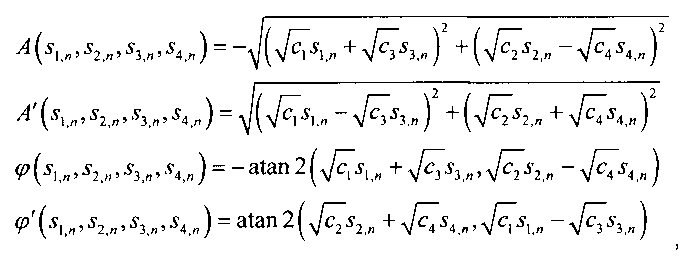
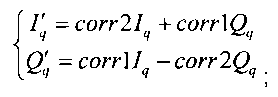
На седьмом шаге i-я (i=1, 2, …, g) группа первого синфазного значения corr1Ii корреляции и первого квадратурного значения corr1Qi корреляции, второго синфазного значения corr2Ii корреляции и второго квадратурного значения corr2Qi корреляции комбинируются в соответствии с нижеприведенным правилом с целью получения i-й (i=1, 2, …, g) группы синфазного комбинированного значения  корреляции с и квадратурного комбинированного значения
корреляции с и квадратурного комбинированного значения  корреляции. Указанное правило выражается как
корреляции. Указанное правило выражается как

Если величина  для какой-либо группы, состоящей из синфазного комбинированного значения
корреляции и квадратурного комбинированного значения
корреляции, имеет максимальное значение среди всех групп, то эта группа выбирается в качестве оптимального синфазного комбинированного значения I′ корреляции и оптимального квадратурного комбинированного значения Q′ корреляции. Затем значение I′ и значение Q′ могут быть обработаны с использованием известных способов обнаружения и контуров автоподстройки.
для какой-либо группы, состоящей из синфазного комбинированного значения
корреляции и квадратурного комбинированного значения
корреляции, имеет максимальное значение среди всех групп, то эта группа выбирается в качестве оптимального синфазного комбинированного значения I′ корреляции и оптимального квадратурного комбинированного значения Q′ корреляции. Затем значение I′ и значение Q′ могут быть обработаны с использованием известных способов обнаружения и контуров автоподстройки.
Кроме того, в соответствии с вариантом осуществления настоящего изобретения предлагается способ приема сигнала спутниковой навигации, служащий для приема сигнала спутниковой навигации, сформированного посредством вышеприведенного способа формирования сигнала спутниковой навигации или устройства формирования такого сигнала. Способ приема сигнала включает прием сигнала спутниковой навигации; демодуляцию сигнала спутниковой навигации с целью получения синфазного компонента основной полосы частот и квадратурного компонента основной полосы частот мультиплексированного сигнала; и получение первого сигнала S1 основной полосы частот, второго сигнала S2 основной полосы частот, третьего сигнала S3 основной полосы частот и четвертого сигнала S4 основной полосы частот на основании амплитуды и фазы синфазного компонента основной полосы частот и амплитуды и фазы квадратурного компонента основной полосы частот мультиплексированного сигнала.
Хотя варианты осуществления и конкретные реализации способа приема и устройства приема сигнала спутниковой навигации описываются, как это сделано выше, со ссылкой на чертежи, следует понимать, что они представлены лишь в качестве примера, а не ограничения. Кроме того, специалисту в данной области техники должно быть понятно, что для приема и обработки сигналов, сформированных посредством вышеприведенного способа формирования сигнала спутниковой навигации и устройств формирования, необходимы система, способ, устройство и приемник с обратными функциями. Поэтому варианты осуществления настоящего изобретения относятся к любым системам, способам, аппаратам и устройствам приема, используемым для обработки сигналов спутниковой навигации, например, таких, как описано выше.
Варианты осуществления настоящего изобретения могут быть осуществлены посредством аппаратных средств, программных средств или их комбинации. Аспект настоящего изобретения предлагает программу, содержащую исполняемые команды для осуществления способа формирования сигнала спутниковой навигации, устройства формирования такого сигнала, способа приема сигнала спутниковой навигации, устройства приема такого сигнала в соответствии с вариантами осуществления настоящего изобретения. Указанная программа может храниться в хранилище (носителе информации) любого типа, например, на носителе с возможностью оптического или магнитного считывания, в микросхеме, в ROM, PROM или в запоминающем устройстве любого типа, как энергозависимом, так и энергонезависимом. В соответствии с примером варианта осуществления настоящего изобретения предлагается машиночитаемое хранилище для хранения указанной программы.
Хотя различные варианты осуществления настоящего изобретения описаны выше со ссылкой на чертежи, следует понимать, что они представлены лишь в качестве примера, а не ограничения. Специалисту в данной области техники должно быть понятно, что в настоящее изобретение без выхода за пределы его сущности и объема могут быть внесены разнообразные изменения в форме и деталях.



















Система и способ генерации пара посредством высокотемпературного газоохлаждаемого реактора
Способ и устройство генерирования двухчастотного сигнала с постоянной огибающей, содержащего четыре расширяющих сигнала, и способ и устройство приема такого сигнала
Способ формирования сигнала c расширенным спектром, устройство формирования сигнала, способ приема сигнала и приемное устройство
Система и способ генерации пара посредством высокотемпературного газоохлаждаемого реактора
Способ и устройство генерирования двухчастотного сигнала с постоянной огибающей, содержащего четыре расширяющих сигнала, и способ и устройство приема такого сигнала
Способ формирования сигнала c расширенным спектром, устройство формирования сигнала, способ приема сигнала и приемное устройство

