Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖУЩИХСЯ ОБЪЕКТОВ МЕТОДОМ ПАССИВНОЙ ЛОКАЦИИ
Вид РИД
Изобретение
Изобретение относится к способам определения скорости движущихся объектов методом пассивной оптической локации, а именно к способам определения скорости по изменению местоположения движущегося объекта.
Известен способ лазерной локации RU 2456637 C1, 20.07.2012. Технический результат достигается тем, что в способе лазерной локации, включающем сканирование пространства последовательностью лазерных сигналов, генерируемых лазерным локатором, регистрацию рассеянных и/или отраженных объектом лазерных сигналов, определение расстояния до объекта по времени задержки между излученными и принятыми сигналами, а углового положения объекта - по направлению соответствующего излученного сигнала, в качестве генерируемого лазерным локатором сигнала используют цуг по меньшей мере двух импульсов с изменяемыми промежутками времени между импульсами и/или соотношением амплитуд импульсов в каждом цуге. Скорость движущегося объекта определяется по измеренным значениям дальности и угловых координат.
Недостатком данного способа является то, что использование активных излучающих средств (лазера) демаскирует факт локации.
Известны устройство и способ (лазерный локатор) измерения скорости движения движущихся объектов на основе эффекта Доплера (Матвеев И.Н., Протопопов В.В. и др. Лазерная локация. М.: Машиностроение, 1984. - 272 с.) по доплеровскому сдвигу частоты.
Недостаток способа - при траекториях движения объекта, перпендикулярных радиальному направлению излучения локатора, скорость объекта невозможно измерить.
Известно осуществление локации с помощью мобильной оптико-электронной станции «Вереск», в которой с помощью двух телевизионных систем высокой четкости (одна - длиннофокусная, другая - с вариобъективом) производят автоматическое сопровождение, удерживая движущийся объект в центре поля зрения оптической системы, по видеокадрам его изображения определяют угловые координаты объекта, для измерения дальности и скорости движения объекта используется лазерный дальномер с максимальной дальностью действия лазерного канала около 20 км. (Альманах. Вооружение ПВО и РЭС России. М.: Издательство НО «Ассоциация «Лига содействия оборонным предприятиям», 2011).
Недостатки способа: использование лазерного дальномера в средствах измерения скорости демаскирует работу устройств локации; дальность измерения скорости движущегося объекта ограничена дальностью обнаружения его лазерным дальномером.
Наиболее близким по технической сущности является способ навигации движущихся объектов RU 2481557, 10.05.2013. Способ включает: получение оптического изображения движущегося объекта на местности; оцифровку полученного изображения; сравнивание текущего изображения с эталонным изображением местности с определением местоположения движущегося объекта в плановых координатах эталонной карты; получение через промежуток времени Δt второго изображения движущегося объекта на местности; оцифровку полученного изображения; сравнивание текущего изображения с эталонным изображением местности с определением второго местоположения движущегося объекта в плановых координатах эталонной карты; вычисление линейного перемещения по изменению местоположения; определение средней скорости движущегося объекта за промежуток времени Δt.
Недостатки способа: сложность получения пригодных для оцифровки изображений движущегося объекта на местности в различных временах суток и природных условиях; невозможность определения скорости объекта, движущегося в воздухе и по обширной водной глади.
Скорость полета самолета является характеристикой его исправного технического состояния. В ряде случаев использование активной локации - лазера для измерения скорости летящего самолета - не допустимо, таким образом, происходит расширение возможностей локации.
Задачи, на решение которых направлен заявленный способ: расширение возможностей навигации движущихся объектов, в частности измерение скорости полета самолета, невозможность обнаружения антилокационными средствами противника факта локации, независимость от природных условий.
Технический результат достигается за счет осуществления способа следующим образом: осуществляют пассивную локацию движущегося объекта при помощи телевизионной системы высокой четкости с формированием видеокадров перемещения движущегося объекта в поле зрения оптической системы и их оцифровкой; сравнением соотношений линейных параметров движущегося объекта и особенностей его конструкции с данными соответствующих идентификационных баз данных осуществляют идентификацию типа движущегося объекта и по типу движущегося объекта определяют его линейные размеры; формируют начало и конец перемещения центра тяжести изображения движущего объекта на фотоприемной матрице и определяют величину перемещения изображения движущегося объекта Lп за промежуток времени Δt от начального кадра N0 до Ni; определяют линейную длину перемещения движущегося объекта в поле зрения оптической системы L в метрах, используя соотношение линейных размеров движущегося объекта и его изображения на фотоприемной матрице; по измеренным значениям расстояния L и времени Δt определяют скорость движущего объекта V=L/Δt.
Осуществление способа в случае определения скорости полета самолета.
Сущность способа поясняется Фиг. 1 и 2.
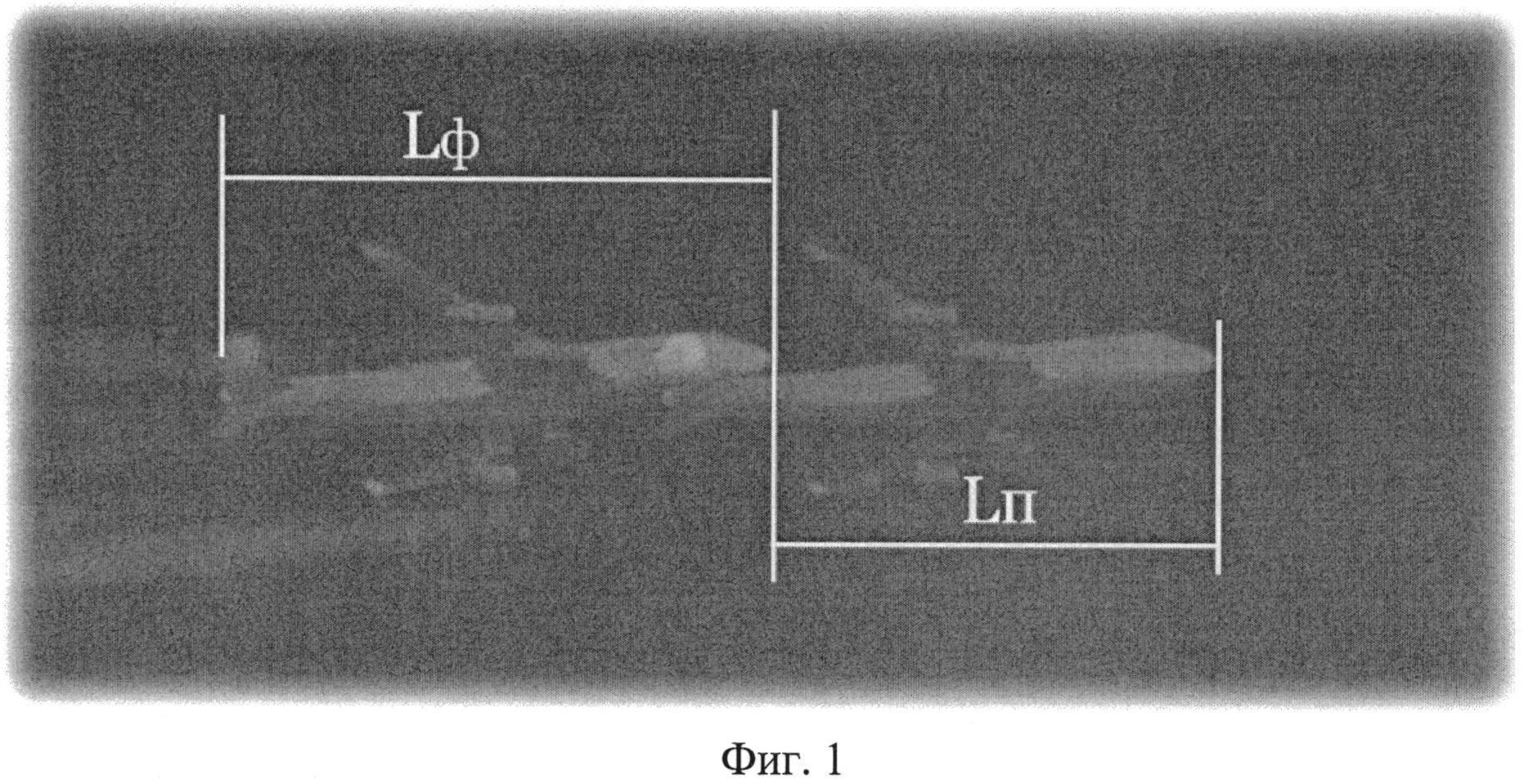
Фиг. 1 - изображения самолета на фотоприемой матрице за время одного кадра, где
LФ - длина фюзеляжа;
Lп - расстояние, на которое переместился самолет за время одного кадра.
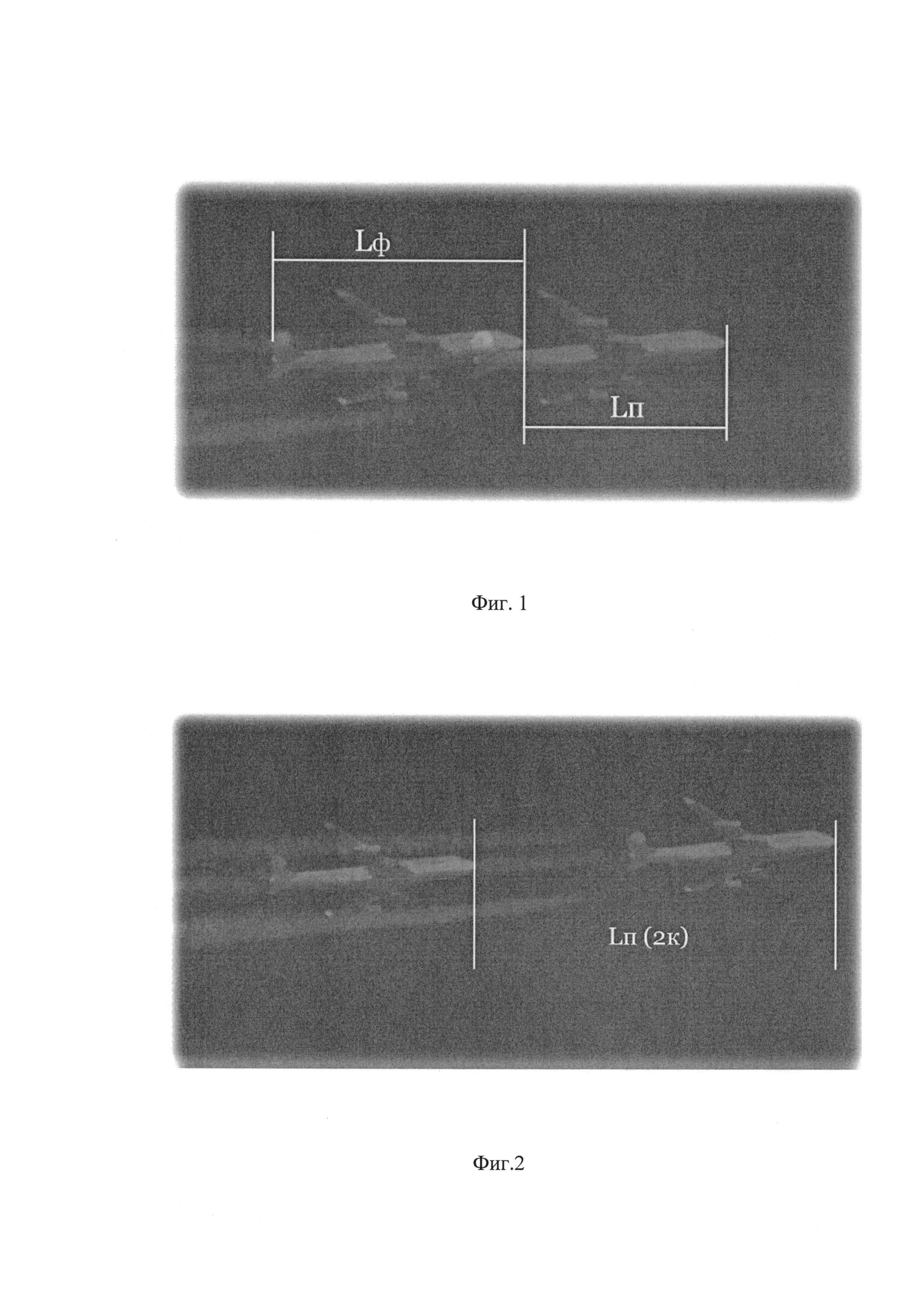
Фиг. 2 - изображения самолета на фотоприемой матрице за время двух кадров, где Lп - расстояние, на которое переместился самолет за время двух кадров.
Способ осуществляется следующим образом: на временном интервале измерения скорости полета самолета в следящей телевизионной системе высокой четкости отключают режим автоматического сопровождения самолета по центру его изображения и формируют видеокадры перемещения изображения самолета в поле зрения оптической системы и оцифровывают; осуществляют идентификацию типа самолета сравнением соотношений линейных параметров самолета и особенностей его конструкции с данными соответствующих идентификационных баз данных и по типу самолета определяют длину фюзеляжа самолета, формируют начало и конец перемещения центра тяжести изображения самолета на фотоприемной матрице от первого до N-го видеокадра и определяют величину перемещения изображения движущегося объекта Lп за промежуток времени Δt; по соотношению реальных линейных размеров и изображений на фотоприемной матрице вычисляют линейное перемещение самолета в поле зрения телевизионной системы за N кадров, по числу видеокадров наблюдения определяют время, по значению линейного перемещения L и времени наблюдения Δt определяют скорость полета самолета V=L/Δt.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является измерение скорости полета самолета за счет использования видеокадров изображения самолета, полученных с помощью пассивной локации телевизионной системой высокой четкости. В заявляемом способе наилучшая точность измерения скорости достигается на линии наблюдения, перпендикулярной траектории полета самолета.
Пример осуществления способа для определения скорости полета самолета.
В оптико-электронном блоке формируется изображение самолета в виде последовательных видеокадров. С фотоприемной матрицы сформированные видеокадры считываются в запоминающее устройство и передаются далее в блок обработки изображения, в котором формируется изображение, содержащее первый и N-й видеокадр, определяются координаты центра двумерного изображения самолета и величина перемещения центра тяжести двумерного изображения самолета Lп за промежуток времени Δt от первого до N i-го видеокадра. Сравнением соотношений линейных параметров инвариантных к масштабу, например, по отношению ширины фюзеляжа к его длине и/или по отношению размаха крыла к длине фюзеляжа движущегося объекта, особенностей его конструкции, например, по числу двигателей, с данными соответствующих идентификационных баз данных осуществляют идентификацию типа самолета. Информация о типе самолета поступает в блок базы данных, из которого в вычислительный блок поступает значение длины фюзеляжа самолета в метрах. По количеству длин фюзеляжа Lф укладывающихся в Lп определяют расстояние, пролетаемое самолетом L в метрах. По числу видеокадров наблюдения определяют время Δt. Эти данные поступают в вычислительный блок для определения скорости полета самолета V=L/Δt.
Возможность осуществления заявляемого способа показывает следующий пример. Видеокадры высокой четкости изображения были получены с помощью фото- и видеотехники и длиннофокусного фотообъектива. На Фиг. 1 приведено фотографическое изображение самолета (Боинг 747) в полете на дальности 30 км. Время полета Δt=0,25 с. (1 видеокадр). Длина фюзеляжа самолета 70,5 м. Lп/Lф=0,85. Расчеты показали, что скорость полета самолета V=(70,5 х 0,85)/0,25 = 240 м/с = 864 км/ч, что для данной высоты полета является крейсерской (оптимальной). На Фиг. 2 приведены изображения самолета (Боинг 747). Время полета Δt 0,5 с (два кадра).
Заявленный способ позволяет работу оптико-электронных локационных средств делать скрытной, так как исключает использование активных излучающих средств локации.
Способ определения скорости движущихся объектов методом пассивной локации, заключающийся в том, что получают оптические изображения движущегося объекта, преобразуют полученные изображения в цифровые, по изменению местоположения вычисляют линейное перемещение движущегося объекта за фиксированный интервал времени и определяют скорость перемещения движущегося объекта, отличающийся тем, что оптическое изображение движущегося объекта получают методом пассивной локации при помощи телевизионной системы высокой четкости с формированием видеокадров перемещения движущегося объекта в поле зрения оптической системы и их оцифровкой, при этом сравнением соотношений линейных параметров движущегося объекта и особенностей его конструкции с данными соответствующих идентификационных баз данных осуществляют идентификацию типа движущегося объекта и определяют его линейные размеры; величину перемещения изображения движущегося объекта п на фотоприемной матрице определяют по перемещению центра тяжести изображения движущегося объекта за промежуток времени от начального кадра до , при этом линейное перемещение движущегося объекта в поле зрения оптической системы определяют, используя соотношение линейных размеров движущегося объекта и его изображения на фотоприемной матрице, определяют скорость движущего объекта

Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации
Обнаружитель маневра баллистической ракеты по фиксированной выборке произведений дальности на радиальную скорость
Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость и устройство для его реализации
Способ определения дальности до движущегося воздушного объекта методом пассивной локации
Способ идентификации типа самолета средствами пассивной оптической локации и устройство для его осуществления
Способ определения курса объекта на линейной траектории с использованием измерений его радиальной скорости
Устройство гашения механических колебаний элементов антенных систем, выполненных в форме консольной балки
Цифровое устройство определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса
Способ и устройство определения вертикальной скорости баллистической цели с использованием оценок первого и второго приращений ее радиальной скорости

