Результат интеллектуальной деятельности: СПОСОБ КАЛИБРОВКИ АКСЕЛЕРОМЕТРИЧЕСКОГО ТРЕХОСЕВОГО ИНКЛИНОМЕТРА
Вид РИД
Изобретение
Изобретение относится к метрологическому обеспечению - калибровке инклинометров, выполненных на основе трехосевого акселерометра. Такие инклинометры могут быть использованы в геофизических работах, устройствах автономной навигации и других задачах. Отличительной особенностью заявляемого изобретения является простота и дешевизна реализации.
Измерения акселерометром по осям чувствительности могут быть представлены в виде:

где:
А - результат измерения ускорения акселерометром по оси чувствительности;
G - действительное значение проекции вектора гравитационного ускорения  на ось чувствительности;
на ось чувствительности;
k - коэффициент чувствительности акселерометра по оси;
m - статическая ошибка акселерометра по оси (показания акселерометра при отсутствии гравитации).
Величины k и m в общем случае неизвестны, но могут быть определены при калибровке в заводских или лабораторных условиях. Однако эти характеристики изменяются со временем и зависят от условий применения. Величина вектора гравитационного ускорения
также изменяется в зависимости от места, высоты измерений и других факторов. Указанные обстоятельства не позволяют достоверно оценить и использовать результаты измерений акселерометра. У трехосевого акселерометра величины k и m по осям различны, что еще более усложняет задачу инклинометра - определение углов наклона объекта исследования. В заявляемом изобретении предлагается простой способ решения этой задачи, применимый в любых условиях.
Известны способы калибровки инклинометров [1], [2] и многие другие, заключающиеся в том, что калибруемые инклинометры устанавливаются в специальные ручные или автоматизированные установки, обеспечивающие повороты испытуемого прибора на определенные углы. Результаты сравниваются с эталонными измерениями. При необходимости проводится градуировка инклинометра путем проведения измерений при вращении прибора с выбранным шагом.
Недостатками таких способов являются высокие стоимость оборудования и трудоемкость.
Известен способ определения масштабного коэффициента акселерометра [3], заключающийся в том, что акселерометр поворачивают относительно оси на положительный и отрицательный углы и оценивают разность принятых сигналов. Такой прием позволяет устранить статическую ошибку измерений m.
Недостатком такого способа является сложность определения коэффициента чувствительности, поскольку величина вектора гравитационного ускорения
известна не точно.
Наиболее близким к заявляемому способу является способ определения угла наклона трехосевым, j=1÷3, акселерометром [4], заключающийся в том, что акселерометр устанавливают так, чтобы его первая ось, выбираемая как ось вращения, пересекалась с вектором гравитационного ускорения
, предпочтительно под углом 90°, калибруют вторую ось акселерометра, для чего вращают его вокруг первой оси, фиксируют в четырех, i=1÷4, ортогональных положениях, в каждом из которых измеряют проекции A2i вектора гравитационного ускорения
на вторую ось акселерометра, вычисляют статическую ошибку акселерометра по второй оси m2 путем усреднения измерений проекций вектора гравитации на эту ось:

Способ [4] предполагает следующую процедуру калибровки.
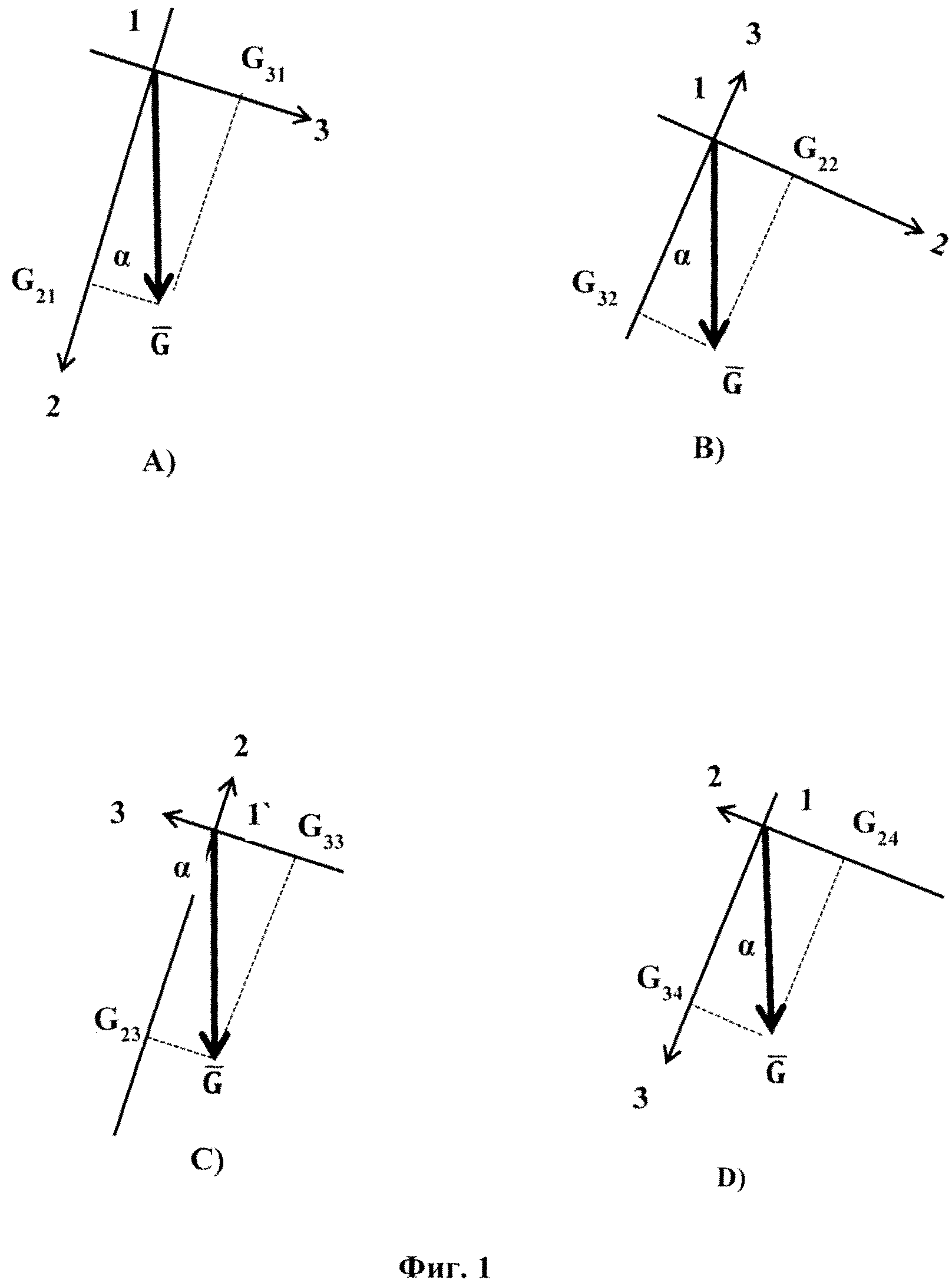
На Фиг. 1 приведены оси 1, 2 и 3 трехосевого акселерометра. Ось вращения 1 перпендикулярна плоскости рисунка и вектору гравитационного ускорения
, ось 2 имеет угол α с вектором гравитационного ускорения
, а его проекция на эту ось G21=Gcos(α). Тогда в соответствии с (1) в этом положении акселерометр измерит величину:

При повороте осей акселерометра 2 и 3 вокруг оси 1 на 180°, Фиг. 1С, акселерометр второй оси измерит величину:
Поскольку G23=-G21, (см. Фиг. 1А и С), получим:

Аналогичные результаты будут получены при поворотах на ±90° относительно начального положения, Фиг. 1В и D:


Здесь учтено, что G24=-G22.
Сложение результатов измерений A2i по всем четырем, i=1÷4, положениям осей позволяет получить усредненную величину статической ошибки второй оси:

Важно отметить, что результаты измерений являются наиболее точными при значениях угла α, близких к 45°. Кроме того, как показано в [4], наиболее точный результат будет получен, если ось 1 перпендикулярна вектору гравитационного ускорения
. В противном случае в качестве вектора
следует использовать его проекцию на плоскость 23 с ухудшением точности.
В [4] предлагается вести калибровку осей по очереди, однако очевидно, что описанная выше процедура калибровки может вестись одновременно для осей 2 и 3 с получением статической ошибки третьей оси m3.
Для определения коэффициентов чувствительности kj по осям в [4] предлагается использовать соотношение (1), однако, как отмечено выше, величина вектора гравитационного ускорения
известна не точно, что не позволяет получить искомые коэффициенты.
Таким образом, недостатком способа [4] является низкая точность определения коэффициентов чувствительности по осям акселерометра, а следовательно, низкая точность определения углов наклона объекта.
Задачей, решаемой заявляемым изобретением, является создание простого и дешевого способа калибровки трехосевого акселерометра для определения углов наклона объекта инклинометром.
Для решения этой задачи одновременно со второй осью аналогичным образом калибруют третью ось акселерометра с вычислением ее статической ошибки m3, вычисляют относительный k32 - коэффициент чувствительности третьей k3 и второй k2 осей акселерометра, затем устанавливают акселерометр так, чтобы выбрать в качестве оси его вращения вторую ось, и, действуя аналогично, вычисляют статическую ошибку первой оси m1 и относительный k31 - коэффициент чувствительности третьей k3 и первой k1 осей, при практических измерениях устанавливают акселерометр в требуемое положение, измеряют проекции Bj вектора гравитационного ускорения
на все оси акселерометра, устраняют статические ошибки измерений по каждой оси, нормируют измерения по всем осям с использованием относительных коэффициентов чувствительности, вычисляя углы αj между осями чувствительности акселерометра и вектором гравитационного ускорения
(углы наклона).
Существенными отличиями заявляемого способа по сравнению с прототипом являются:
Одновременно с калибровкой второй оси акселерометра аналогичным образом калибруют третью ось акселерометра с вычислением ее статической ошибки m3. Это позволяет ускорить процесс калибровки.
В прототипе оси калибруют по очереди.
Вычисление относительного k32=k3/k2 коэффициента чувствительностей третьей и второй осей акселерометра позволяет оценить степень их различия, впоследствии выровнять их чувствительности и, благодаря этому, точно определить ориентацию вектора гравитации
в этой плоскости.
Калибровка акселерометра с использованием второй оси в качестве оси вращения позволяет определить статическую ошибку первой оси m1 и относительный k31=k3/k1 коэффициент чувствительности третьей и первой осей. В итоге это позволяет выполнить калибровку акселерометра по всем осям с получением статических ошибок и относительных чувствительностей всех осей.
В прототипе делается неудачная попытка определить чувствительности k всех осей по отдельности, используя неточно известные значения вектора гравитационного ускорения
и его проекций на оси.
При практических измерениях после установки акселерометра в требуемое положение и проведения измерений проекций Bj вектора гравитационного ускорения
на все оси акселерометра устраняют статические ошибки измерений по каждой оси, нормируют измерения по всем осям и вычисляют углы наклона αj осей чувствительности акселерометра к вектору гравитационного ускорения
.
В прототипе имеется возможность скомпенсировать только статическую ошибку акселерометра.
Таким образом, главным отличием заявляемого способа по сравнению с известными авторам аналогами является то, что благодаря полученным соотношениям отпадает необходимость определения не только коэффициентов k - чувствительности по осям акселерометра, но и самого вектора гравитации
.
Заявляемое изобретение иллюстрируют следующие графические материалы.
Фиг. 1 - проекции вектора гравитационного ускорения
на оси 2 и 3 акселерометра при вращении плоскости 23.
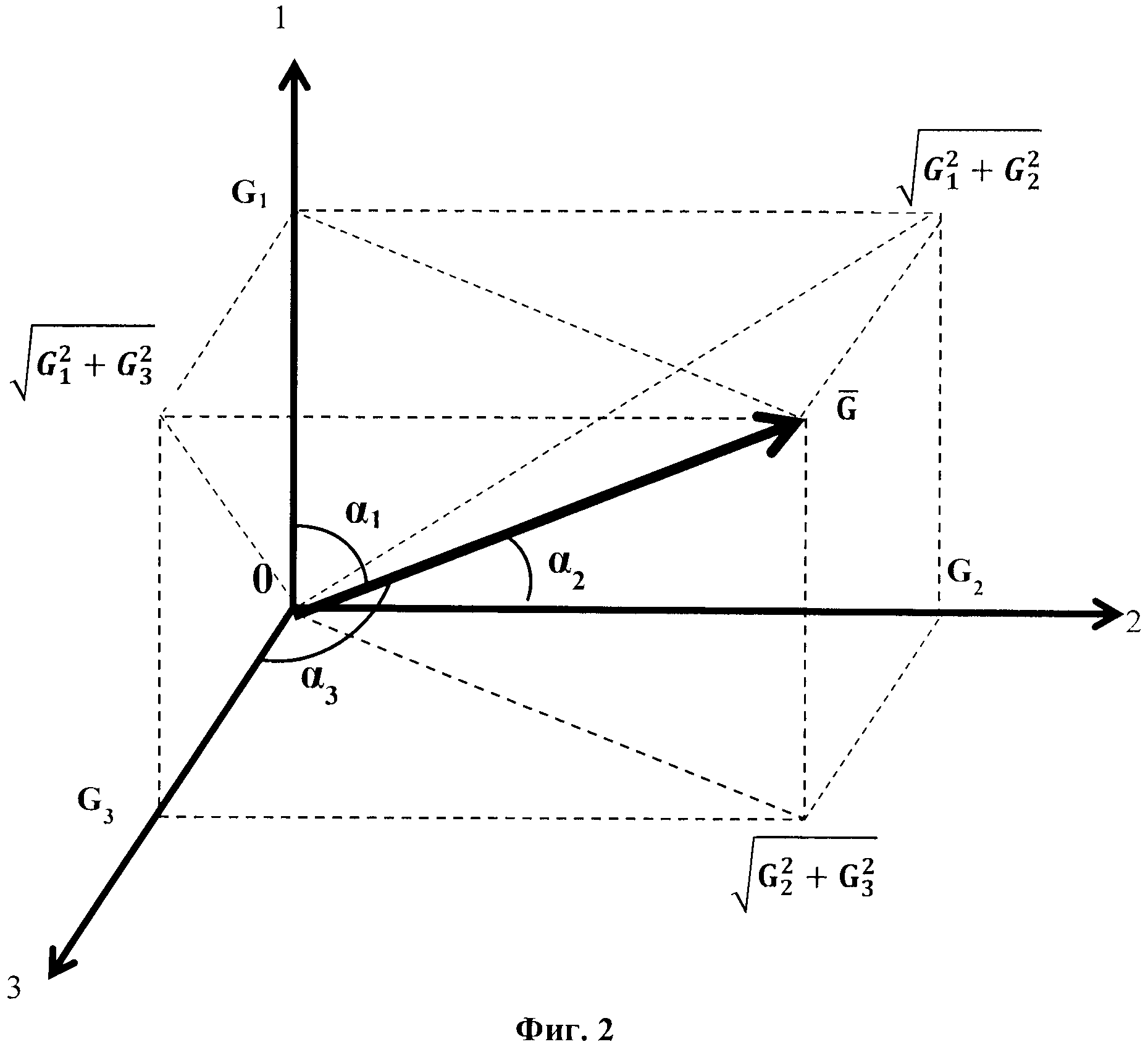
Фиг. 2 - проекции вектора гравитационного ускорения
на оси 1, 2 и 3 акселерометра при практических измерениях углов наклона.
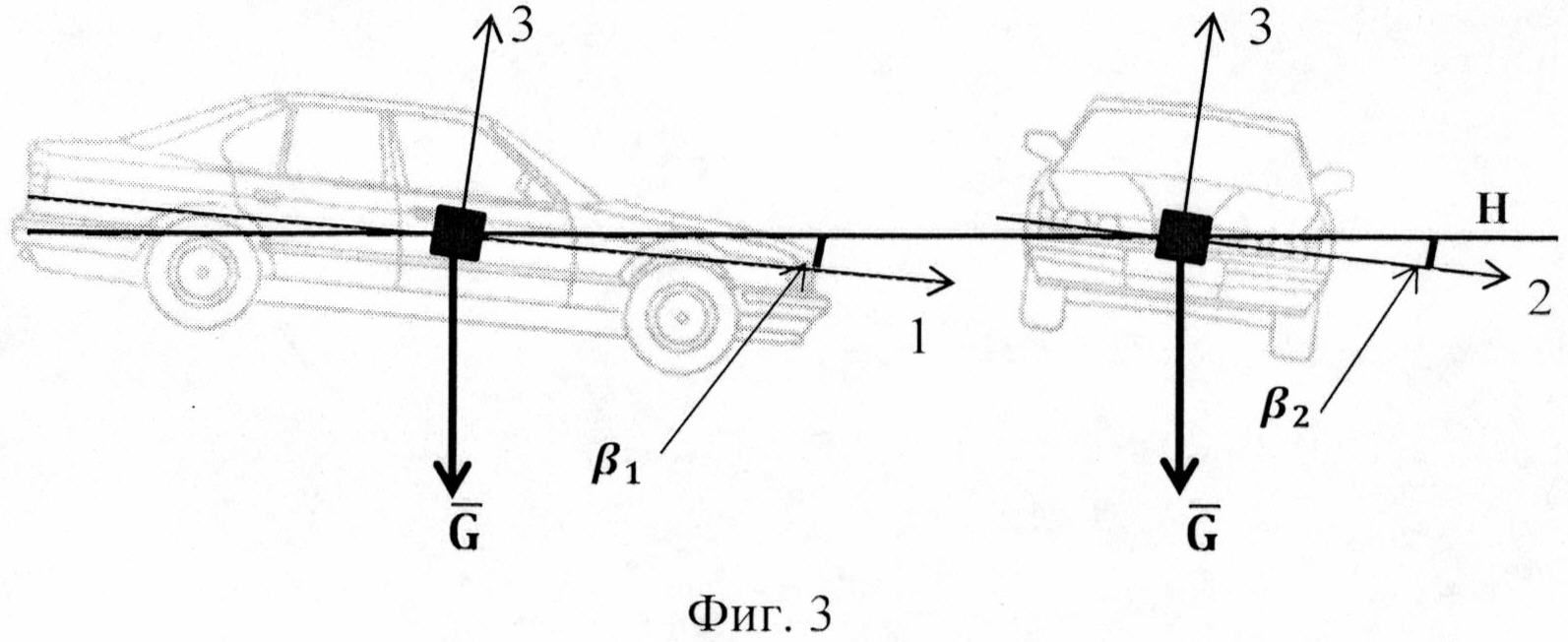
Фиг. 3 - углы наклона объекта относительно плоскости горизонта.
Рассмотрим возможность реализации заявляемого способа.
Для калибровки устанавливают акселерометр так, чтобы его одна ось (ось вращения), которую условно называем «первой», пересекалась с вектором гравитационного ускорения
, т.е. ось не должна совпадать с вектором
. На практике предпочтительно, чтобы первая ось была перпендикулярна вектору гравитационного ускорения
и лежала в плоскости местного горизонта. Данное требование не является категоричным. Если первая ось имеет угол наклона α1, отличный от 90°, то проекция вектора гравитационного ускорения
на плоскость 23 составит Gsin(α1). Строго математически результат калибровки не зависит от величины указанной проекции. Однако на практике при уменьшении угла α1 от 90° до 0° реальная точность измерений снижается, а при α1=0° калибровка по второй и третьей осям становится невозможной, поскольку проекция вектора
на плоскость 23 оказывается нулевой.
Оси 2 и 3 акселерометра для калибровки целесообразно развернуть под углом 45° по отношению к вектору гравитационного ускорения
. Это требование тоже не категорично, но улучшает точность калибровки.
Калибруют вторую и третью оси акселерометра, для чего вращают его вокруг первой оси, фиксируют в четырех, i=1÷4, ортогональных положениях, в каждом из которых измеряют проекции A2i и A3i вектора гравитационного ускорения G соответственно на вторую и третью оси акселерометра. Вычисляют статическую ошибку акселерометра по второй m2 и третьей m3 осям путем усреднения измерений проекций вектора гравитационного ускорения на эту ось, используя формулу вида (7).
На втором этапе калибруют первую и третью оси акселерометра, для чего выбирают в качестве оси вращения вторую ось и, действуя аналогично описанному выше, измеряют A3i и A1i и вычисляют статическую ошибку первой оси m1.
Для вычисления относительного коэффициента чувствительности по второй и третьей осям акселерометра воспользуемся следующими соображениями: найдем разности между (3) и (4), а также между (5) и (6):


После возведения в квадрат (8) и (9) и сложения получим:

Для третьей оси, действуя аналогичным образом, получим:

Если разделить (11) на (10) и извлечь квадратный корень, то получим выражение для вычисления относительного коэффициента чувствительности третьей и второй осей акселерометра:
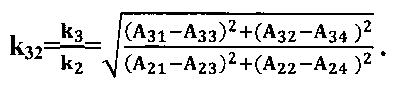
Таким образом, для вычисления относительного коэффициента чувствительности по третьей и второй осям не требуется знания коэффициентов чувствительности k по каждой из них, а также величины и ориентации вектора гравитационного ускорения
, т.е. достаточно тех же измерений, которые были необходимы для определения статических ошибок m.
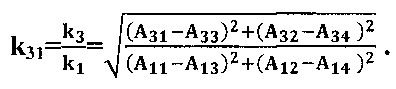
Аналогичным образом на втором этапе калибровки вычисляется относительный коэффициент чувствительности по третьей и первой осям акселерометра:
При практических измерениях - использовании откалиброванного акселерометра - устанавливают инклинометр на объект исследования и измеряют проекции Bj вектора гравитационного ускорения
на все оси акселерометра. Далее по ним определяют углы αj между вектором гравитационного ускорения
и 1, 2 и 3 осями акселерометра, Фиг. 2, используя соотношения:
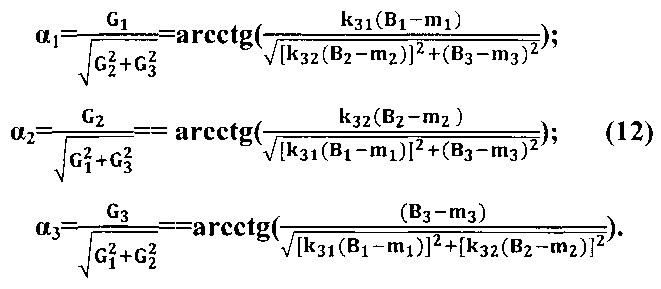
В этих соотношениях, в соответствии с (1), выражения в круглых скобках (Bj-mj) обеспечивают компенсацию статических ошибок измерений по осям акселерометра. Коэффициенты относительной чувствительности k32 и k31 нормируют измерения по всем осям, устраняя различия в их чувствительности. Справедливость выражений (12) легко проверить, подставив в них:
В ряде практических приложений удобно пользоваться углами βj=(90°-αj) между осями 1, 2 и 3 акселерометра и плоскостью горизонта. Эти углы рассчитываются по формулам, аналогичным (12), с заменой функции arcctg на arctg.
Например, Фиг. 3, если объектом является неподвижный или равномерно движущийся автомобиль, то, совместив первую ось акселерометра с продольной осью автомобиля, вторую ось акселерометра - с поперечной осью, а третью направить ортогонально первым двум, в соответствии с (12) можно определить углы β1 и β2 наклона автомобиля к плоскости горизонта Н.
При технической реализации трехосевой акселерометр через соответствующие контроллеры подключают к компьютеру, который обеспечивает прием измерений на этапах калибровки инклинометра, вычисление статических ошибок и относительных коэффициентов чувствительности, а при его практическом использовании - определение углов наклона объекта.
Таким образом, заявляемый способ может быть реализован и позволяет путем несложных измерений и вычислений откалибровать инклинометр и определить углы ориентации исследуемого объекта относительно гравитационного поля Земли.
Источники информации
1. Лобанков В.М. Калибровка скважинной геофизической аппаратуры. Издательство: Уфа: «Мастер-Копи» 2011, 176 стр. http://tinref.ru/000_uchebniki/05300tehnika/003_kalibrovka_geofizich_aparaturi/015.htm.
2. Патент RU 120215.
3. С.Ф. Коновалов и др. Автоматическое оборудование для испытаний акселерометров. Сборник 4 Санкт-Петербургской международной конференции по интегрированным навигационным системам. Май, 1997 г., ISB №5-900780-13-9.
4. Определение угла наклона акселерометром, http://bitaks.com/resources/inclinometer/ugol_naklona.pdf.
Способ калибровки акселерометрического трехосевого, j=1÷3, инклинометра, заключающийся в том, что акселерометр устанавливают так, чтобы его первая ось, выбираемая как ось вращения, пересекалась с вектором гравитационного ускорения предпочтительно под углом 90°, калибруют вторую ось акселерометра, для чего вращают его вокруг первой оси, фиксируют в четырех, i=1÷4, ортогональных положениях, в каждом из которых измеряют проекции A вектора гравитационного ускорения на вторую ось акселерометра, вычисляют статическую ошибку акселерометра по второй оси m путем усреднения измерений проекций вектора гравитации на эту ось: отличающийся тем, что одновременно со второй осью аналогичным образом калибруют третью ось акселерометра с вычислением ее статической ошибки m, вычисляют относительный k - коэффициент чувствительности третьей k и второй k осей акселерометра: затем устанавливают акселерометр так, чтобы выбрать в качестве оси его вращения вторую ось и, действуя аналогично, вычисляют статическую ошибку первой оси m и относительный k - коэффициент чувствительности третьей k и первой k осей: при практических измерениях устанавливают акселерометр в требуемое положение, измеряют проекции B вектора гравитационного ускорения на все оси акселерометра, устраняют статические ошибки измерений по каждой оси, нормируют измерения по всем осям с использованием относительных коэффициентов чувствительности, вычисляя углы α между осями чувствительности акселерометра и вектором гравитационного ускорения по формулам:









Устройство магнитной дефектоскопии рельсов
Способ ультразвукового контроля подошвы рельсов
Измеритель магнитного дефектоскопа протяженного изделия сложной формы
Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний
Способ определения истинного курса подвижного объекта
Способ полевой калибровки магнитного компаса
Модульная информационная система парашютиста
Способ оценки дефекта в головке рельса
Способ оценки коррозионного повреждения подошвы рельса
Способ определения зоны досягаемости парашютистом целевой точки приземления
Устройство магнитной дефектоскопии рельсов
Способ ультразвукового контроля подошвы рельсов
Измеритель магнитного дефектоскопа протяженного изделия сложной формы
Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний
Способ определения истинного курса подвижного объекта
Способ полевой калибровки магнитного компаса
Модульная информационная система парашютиста
Способ компенсации систематической составляющей дрейфа нулевого сигнала датчика угловой скорости
Способ определения местоположения наземного подвижного объекта
Способ определения зоны досягаемости парашютистом целевой точки приземления

