Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ СОЛНЕЧНОЙ БАТАРЕИ НИЗКООРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА ПО ВЫРАБАТЫВАЕМОМУ ТОКУ
Вид РИД
Изобретение
Изобретение относится к системам электроснабжения космических аппаратов (КА) с солнечными батареями.
Снабжение электроэнергией бортового оборудования КА в течение всего времени его функционирования, как правило, осуществляется при помощи солнечных батарей. Величина тока, вырабатываемого солнечной батареей (СБ), зависит от ориентации плоскости ее рабочей поверхности относительно направления излучения Солнца.
КА, функционирующие на низких, солнечно-синхронных орбитах, например, спутники дистанционного зондирования Земли, в процессе функционирования периодически пересекают освещенный и теневой участки орбиты. При отсутствии достаточного тока, необходимого для работы бортового оборудования (БО), например, на теневом участке орбиты, электроснабжение может осуществляться от аккумуляторных батарей, подзарядка которых была произведена током, выработанным СБ на освещенном участке орбиты.
Для повышения эффективности работы СБ используют бортовые системы управления (БСУ), в состав которых входят устройства поворота СБ, выполненные на базе электромеханических приводов (ЭМП) с закрепленными на их выходном валу датчиками положения. Устанавливаемые устройства поворота СБ имеют незначительную угловую скорость вращения, всего лишь в 3-5 раз выше угловой скорости вращения низкоорбитальных КА вокруг Земли.
Управление ориентацией, а также бортовым оборудованием КА осуществляется при помощи алгоритмов, реализованных в виде программного обеспечения бортовых вычислительных машин, входящих в состав БСУ. С помощью указанного программного обеспечения решаются задачи, связанные с определением положения КА в пространстве, управлением его ориентацией, движением по заданной орбите, а также управлением бортовым оборудованием. Одной из задач, решаемых в БСУ, является управление положением СБ.
С помощью, например, датчиков положения Солнца, программное обеспечение системы управления движением определяет направление на Солнце относительно связанных с КА осей координат и вычисляет заданный угол для программного обеспечения управления ориентацией СБ, регистрирует и прогнозирует моменты входа и выхода из теневого участка орбиты КА. Программное обеспечение управления ориентацией СБ при превышения угла рассогласовании между заданным и текущим угловым положением панели СБ более порога срабатывания формирует команды на ее вращение в направлении уменьшения указанного рассогласования. Команды поступают с выхода БСУ в устройство поворота СБ. После уменьшения рассогласования до величины порога отпускания программное обеспечение формирует команды на прекращение вращения СБ.
Как правило, управление положение СБ определяется по информации от датчика углового положения выходного вала ЭМП СБ. Во время полета КА по заданной орбите возможно появление длительных электромагнитных помех, электростатических разрядов, которые могут приводить к сбоям и отказам указанных датчиков положения, повреждения микрометеоритами поверхности панели СБ. Кроме того, в процессе функционирования возможны отказы датчиков положения СБ, а также нарушения работы аппаратуры БСУ, в части передачи информации углового положения СБ. Указанные сбои и отказы могут привести к неправильной ориентации СБ, что приводит, в свою очередь, к снижению электроснабжения бортового оборудования и, в конечном итоге, к нарушениям при выполнении задач, решаемых на борту КА.
На величину тока, вырабатываемого СБ, воздействуют условия ее функционирования в космическом пространстве, в том числе уровень солнечного излучения, температура, ориентация относительно направления на Солнце, изменения нагрузки, обусловленные переключением режимов работы бортового оборудования (БО).
Панели СБ КА освещаются потоками излучения Солнца, а также отраженным солнечным излучением от поверхности и облаков Земли, при этом указанные потоки рассеиваются в атмосфере. Отношение потока излучения, отраженного поверхностью в окружающее пространство, к потоку, упавшему на нее, представляет собой альбедо поверхности. На практике обычно принимают диффузионный закон распространения излучений от Земли, при этом единое значение среднего альбедо для Земли составляет 0,34 [1, с. 272]. На характер изменения вырабатываемого СБ тока влияет изменяющаяся интенсивность излучения Солнца, при этом в случае попадания на рабочую поверхность панели СБ высокоэнергетических частиц возможны кратковременные «всплески» тока. Кроме того, в БСУ могут поступать искаженные значения тока, обусловленные кратковременными сбоями измерительной аппаратуры, например, из-за периодических разрядов статического электричества, накапливаемого на элементах конструкции КА.
Мощность СБ, а следовательно, и ток, вырабатываемый СБ при постоянном напряжении, прямо пропорциональны плотности потока солнечного излучения и косинуса угла отклонения нормали к поверхности СБ от направления на Солнце [1, с. 73].
Изменения тока, обусловленные изменением режимов функционирования БО, могут происходить на длительное время, соизмеримое с периодом вращения СБ, либо кратковременно, в моменты переключения элементов БО, например электромеханических клапанов, мощных коммутаторов. На изменения величины тока, вырабатываемого СБ, связанного с изменением режимов БО, в основном, влияют переключения режимов работы системы обеспечения температурных режимов, двигателей орбитальной ориентации, системы, обеспечивающей периодическое поддержание заданной ориентации КА на орбите, например комплекс управляющих двигателей-маховиков, системы целевого оборудования, включающие, например, приемо-передающие устройства, аппаратуру дистанционного зондирования Земли и др.
Бортовое оборудование КА, функционирующих на низких орбитах, за время полета на теневом и освещенном участке орбиты, не успевает в достаточной степени охладиться либо нагреться. Переключение режимов работы системы обеспечения теплового режима (СОТР), то есть включение и отключение нагревательных и охлаждающих элементов, происходит, как правило, случайным образом, по мере охлаждения или нагрева отдельных блоков БО. Практически включение и отключение указанных элементов, осуществляется не одновременно, что приводит к незначительным колебаниям тока, вырабатываемого СБ.
В моменты начала и окончания вращения СБ на борту КА возникают моменты инерции, которые могут приводить к нарушению его ориентации, при этом требуется стабилизация положения КА при помощи комплекса управляющих двигателей-маховиков, либо двигателей орбитальной ориентации. Как правило, изменение режимов работы указанных систем для стабилизации КА осуществляется на короткое время, на порядок и менее времени вращения СБ от момента достижения угла срабатывания до момента достижения угла отпускания. Переключение режимов бортового оборудования, обеспечивающих выполнение целевой задачи КА, как правило, сопровождается изменением ориентации КА. На время изменения режимов работы систем КА вращение СБ блокируется.
Ряд бортовых систем во время функционирования незначительно влияют на изменение тока, вырабатываемого СБ, поскольку режимы их работы во время функционирования КА на орбите не изменяются, либо потребляют данные системы малый ток. К указанным системам относятся, например, БСУ, гироскопические устройства, шаговые электромеханические двигатели, системы, обеспечивающие ориентацию и навигацию КА, измерение его угловых скоростей, телеметрические измерения, электроснабжение, взаимодействие с наземным комплексом управления (бортовой радиотехнический комплекс) и другие.
Наиболее близким к предлагаемому является способ управления ориентацией солнечной батареи по току, заключающийся в том, что определяют заданный угол солнечной батареи относительно связанных с космическим аппаратом осей координат как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, определяют углы разгона и торможения солнечной батареи, задают угол срабатывания, при котором формируется сигнал рассогласования между заданным и расчетным углами более суммы углов разгона и торможения и менее угла 45°, задают угол отпускания солнечной батареи, при котором прекращается формирование сигнала рассогласования между заданным и расчетным углами, менее угла срабатывания, при наличии сигнала рассогласования осуществляют вращение солнечной батареи с фиксированной угловой скоростью в направлении уменьшения рассогласования по кратчайшему пути между заданным и расчетным углами до момента прекращения формирования сигнала рассогласования, вычисляют расчетное угловое положение солнечной батареи относительно связанных с космическим аппаратом осей координат как произведение угловой скорости солнечной батареи на время вращения [2].
Недостатком известного способа управления ориентацией солнечной батареи по току является высокая зависимость точности определения углового положения СБ от значений токов в моменты начала и окончания вращения СБ от изменений токов нагрузки, излучения Солнца, случайных помех, воздействующих на измерительный элементы.
Технической задачей предлагаемого изобретения является расширение функциональных возможностей и повышение эффективности способа управления положением СБ по току путем минимизации влияния колебаний вырабатываемого ею тока.
Преимуществами предлагаемого способа управления являются:
- уменьшение влияния случайных кратковременных изменений тока, вырабатываемого СБ, связных с изменением режимов работы БО на точность определения углового положения СБ;
- снижение зависимости от колебаний тока, вырабатываемого СБ, вызванных переключением режимов работы БО, и, как следствие, повышение точности определения углового положения СБ по вырабатываемому току;
- сокращение затрат электроэнергии во время нахождения КА на теневом участке орбиты.
Указанный технический результат достигается тем, что в известном способе управления ориентацией солнечной батареи космического аппарата по току, заключающемся в том, что определяют заданный угол солнечной батареи относительно связанных с космическим аппаратом осей координат как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, определяют углы разгона и торможения солнечной батареи, задают угол срабатывания, при котором формируется сигнал рассогласования между заданным и расчетным углами более суммы углов разгона и торможения и менее угла 45°, задают угол отпускания солнечной батареи, при котором прекращается формирование сигнала рассогласования между заданным и расчетным углами, менее угла срабатывания, при наличии сигнала рассогласования осуществляют вращение солнечной батареи с фиксированной угловой скоростью в направлении уменьшения рассогласования по кратчайшему пути между заданным и расчетным углами до момента прекращения формирования сигнала рассогласования, вычисляют расчетное угловое положение солнечной батареи относительно связанных с космическим аппаратом осей координат как произведение угловой скорости солнечной батареи на время вращения, дополнительно задают угловую скорость вращения солнечной батареи, двукратно и более превышающую угловую скорость вращения космического аппарата вокруг Земли, задают диапазон времени определения положения солнечной батареи на освещенном участке орбиты не менее отношения угла 360° к угловой скорости солнечной батареи с минимальным изменением токов потребления бортовым оборудованием, определяют максимальные значения тока, вырабатываемого солнечной батареей при работе бортового оборудования в режимах минимального и максимального потребления тока, устанавливают начальное значение максимального фонового тока, обусловленное отраженным излучением Солнца от поверхности Земли, как произведение альбедо поверхности Земли на максимальный ток, вырабатываемый СБ, корректируют значение максимального фонового тока, задают максимально допустимый угол анализа:

где: Δαmax - максимально допустимый угол анализа;
ωка - угловая скорость КА;
ωсб - угловая скорость СБ;
Iсб - текущее значение тока, формируемого СБ;
Imaxm - максимальный ток, вырабатываемый СБ при фиксированном минимальном потреблении тока бортовым оборудованием на освещенном участке орбиты;
Iмф - максимальный фоновый ток,
задают максимально допустимую ошибку определения углового положения солнечной батареи более угла отпускания и на порядок и менее от половины максимально допустимого угла анализа, задают максимально допустимый период измерения токов на порядок и менее от половины отношения максимально допустимой ошибки к разности угловых скоростей солнечной батареи и космического аппарата, вычисляют точность определения положения солнечной батареи:

где: Δαфто - фактическая точность определения положения солнечной батареи;
ωка - угловая скорость космического аппарата;
ωсб - угловая скорость солнечной батареи;
Tизм - максимально допустимый период измерения токов;
Δαмдо - максимально допустимая ошибка определения положения солнечной батареи,
вычисляют период контроля как отношение фактической точности определения положения солнечной батареи к разности угловых скоростей космического аппарата и солнечной батареи, вычисляют фактический угол анализа:

где: Δαа - фактический угол анализа,
вычисляют интервал анализа токов как отношение фактического угла анализа к разности угловых скоростей солнечной батареи и космического аппарата, в диапазоне времени определения положения солнечной батареи задают ее вращение в направлении изменения заданного угла, на каждом периоде контроля сравнивают первую и вторую половины сумм измеренных токов, полученных на интервале анализа токов, предшествующем текущему периоду контроля, если на текущем периоде контроля сумма измеренных токов превышает, а на периоде, предшествующем первому, указанная сумма не превышает произведение максимального фонового тока на число измеренных токов на указанном периоде, вычисляют угловую поправку к заданному углу:
Δαпопр=0,5·(Tк+Δta)·(ωсб-ωка),
где: Δαпопр - угловая поправка к заданному углу;
Δta - интервал анализа вырабатываемого тока;
Tк - интервал контроля,
в момент изменения знака сравнения половин сумм измеренных токов на текущем периоде контроля токов по сравнению с предыдущем периодом задают значение расчетного угла как сумму заданного угла и угловой поправки, если заданный угол изменяется в направлении увеличения угла, или как их разность, если заданный угол изменяется в противоположном направлении, при этом задают вращение солнечной батареи по указанному выше рассогласованию между заданным и расчетным углами, прекращают вращение солнечной батареи в момент входа космического аппарата в теневой участок орбиты, при этом обнуляют все запомненные значения токов.
Космические аппараты, функционирующие на низких, солнечно-синхронных орбитах, во время полета по орбите, как правило, регулярно пересекают теневой участок орбиты с фиксированным интервалом времени.
В процессе функционирования СБ наблюдаются колебания вырабатываемого ею тока из-за изменения нагрузки, в соответствии с изменением режимов работы бортовых систем и, как следствие, изменяется величина тока, вырабатываемого СБ. Кроме того, величина тока изменяется в соответствии с изменением наклона плоскости орбиты КА в течение года. Изменения тока, вырабатываемого СБ, могут возникать в результате кратковременного переключения режимов работы потребителей малой мощности, например отдельных элементов терморегулирования, клапанов, а также мощных потребителей, например комплекса управляющих двигателей-маховиков, двигателей ориентации, либо средств обогрева крупных секций БО КА, специальных систем КА, обеспечивающих дистанционное зондирование Земли. Включение мощных потребителей, например, при изменении ориентации КА, как правило, связано с изменением ориентации КА для выполнения целевых задач. При этом формируется сигнал запрета на вращение СБ. После выполнения целевой задачи КА устанавливается в исходное положение.
На теневом и освещенном участках орбиты при развороте нормали к рабочей поверхности панели СБ на угол более 90° относительно направления на Солнце панель СБ вырабатывает фоновый ток, так как на нее воздействует отраженное излучение от поверхности Земли, Луны, а также космическое излучение.
На борту КА используют электромеханические приводы СБ с фиксированной угловой скоростью вращения, не менее чем в два раза превышающей угловую скорость движения низкоорбитальных КА вокруг Земли. Малая угловая скорость вращения СБ позволяет уменьшить механические возмущения и колебательные движения панели СБ, возникающие во время ее разгона и торможения.
Как известно, ток, формируемый СБ, зависит от величины угла отклонения нормали к рабочей поверхности СБ от направления на Солнце и может быть определен как:

где: Δα - угол рассогласования между направлением на Солнце и нормалью к рабочей поверхности СБ;
I - ток, вырабатываемый СБ;
Imax - максимально возможный ток, который может вырабатывать СБ.
Указанная формула (1) может быть применена непосредственно для определения зависимости углового положения СБ и формируемого ею тока в условиях фиксированной нагрузки и при отсутствии влияния внешних воздействующих факторов на рабочую поверхность СБ.
Из-за колебаний вырабатываемого тока, обусловленного представленными выше факторами, определение углового положения СБ непосредственно по току может привести к ошибочным результатам. Таким образом, недостатком известного способа управления по расчетному углу является высокая зависимость точности определения углового положения СБ от значения токов в моменты начала и окончания вращения СБ от изменения токов нагрузки, излучения Солнца, случайных помех, воздействующих на измерительный элементы.
Количество вырабатываемой СБ электроэнергии определяется как площадь фигуры, образованной графиком изменения тока за заданный интервал времени.
Данная задача может быть решена, если использовать для определения положения СБ относительно направления на Солнце сравнение количеств электроэнергии, вырабатываемой СБ за одинаковые интервалы времени до и после достижения током максимального значения. При этом предполагается, что в момент сравнения указанных количеств электроэнергии нормаль к рабочей поверхности СБ имеет наименьший угол рассогласования с проекцией единичного вектора направления на Солнце на плоскость вращения указанной нормали.
Предлагаемый способ может быть применен в случае отказа датчика углового положения панели СБ в низкоорбитальных космических аппаратах, функционирующих на солнечно-синхронных орбитах, имеющих угловую скорость вращения соизмеримую с угловой скоростью вращении СБ. Как правило, указанные КА имеют период оборота около 100 минут, причем на каждом витке пересекают теневой участок Земли.
Во время полета КА по орбите при помощи солнечных или звездных датчиков определяют направление на Солнце, при этом для системы ориентации СБ формирует заданный угол как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат.
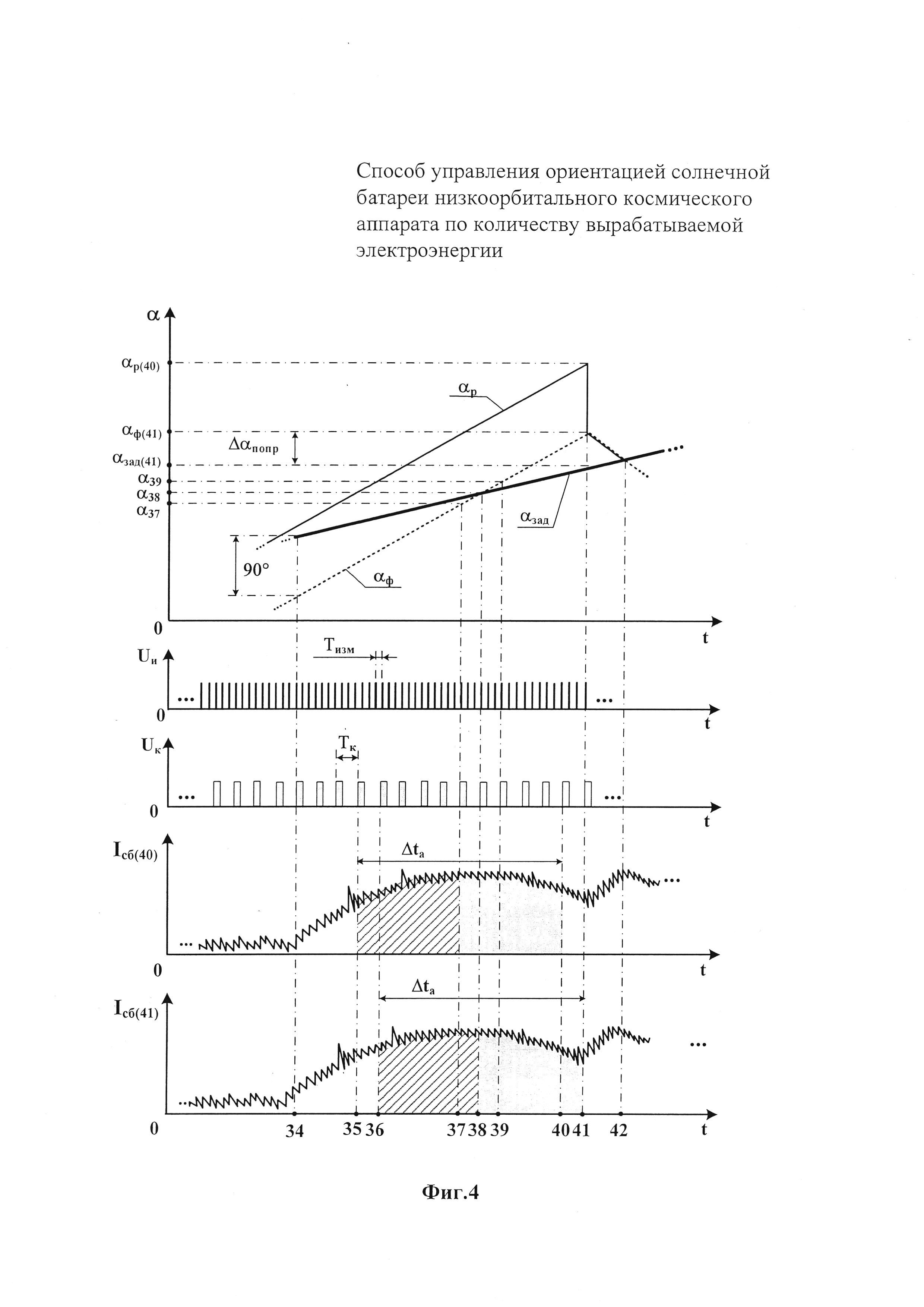
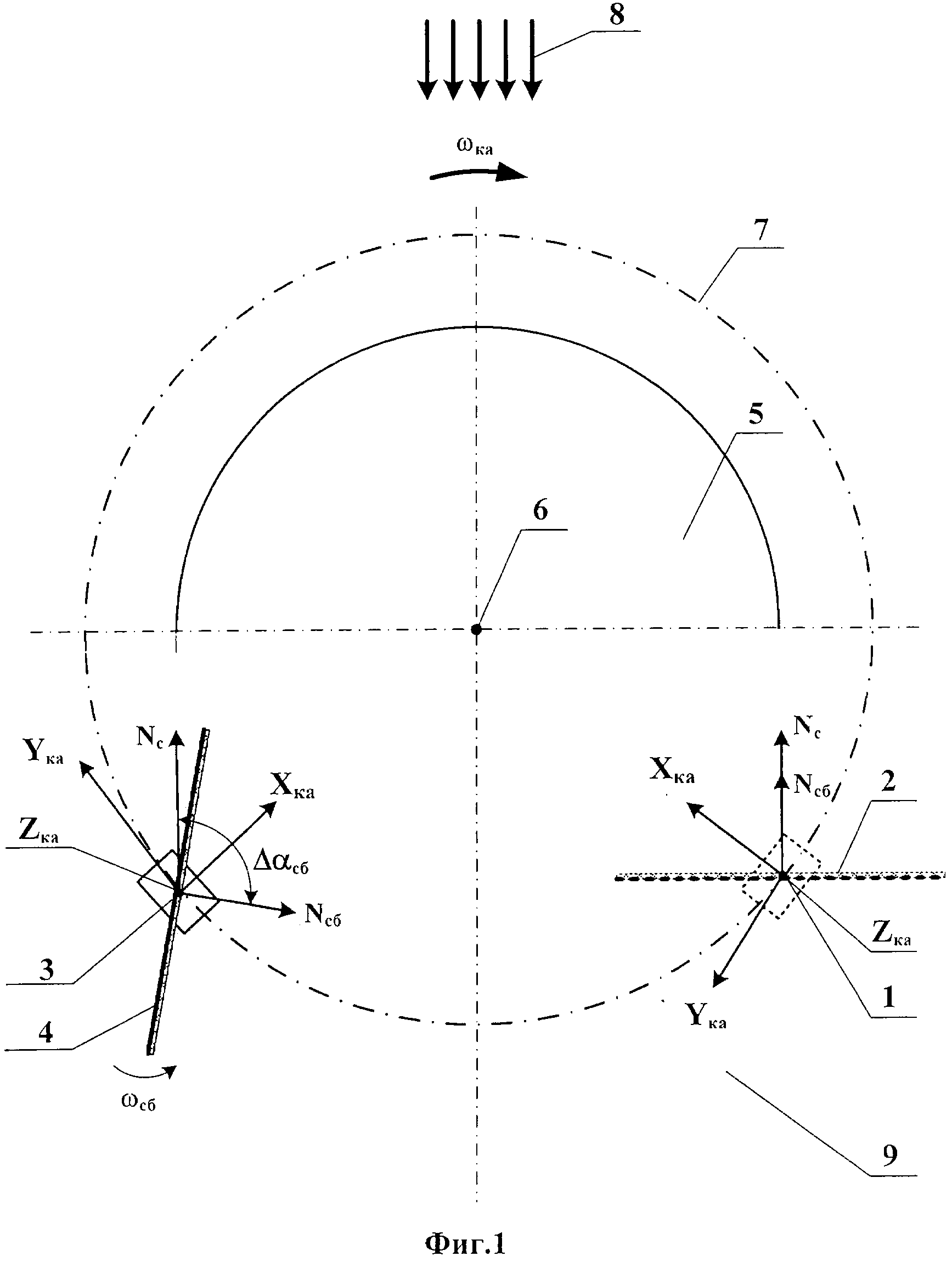
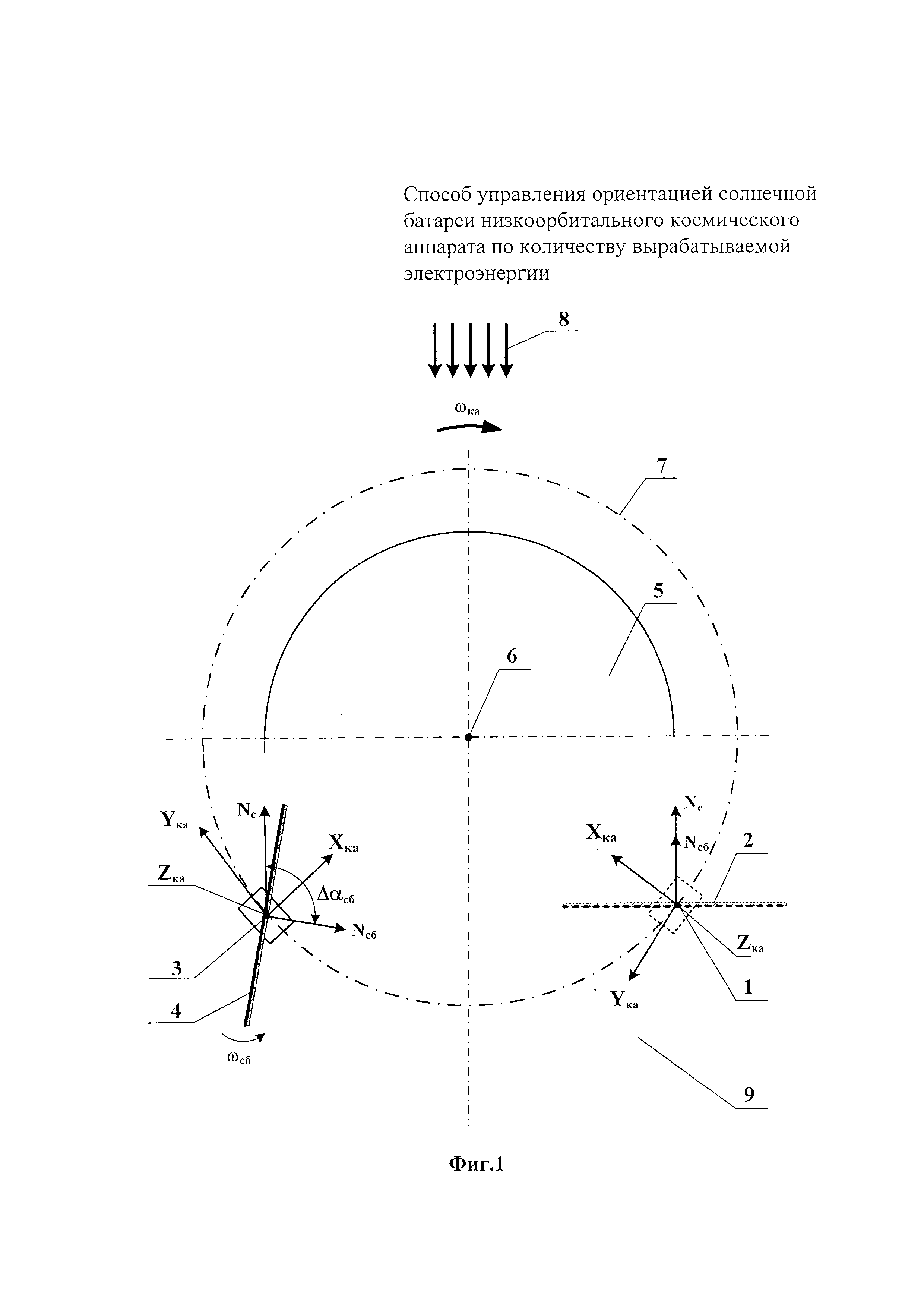
На фиг. 1 представлены положения КА с установленной на нем СБ в моменты входа и выхода из теневого участка орбиты Земли, на фиг. 2 - графики изменения заданного и фактического углового положения СБ, вырабатываемого тока, а также периодов контроля указанного тока, на фиг. 3 - графики соответствия изменения заданного и фактического углового положения СБ вырабатываемому ею току во время вращения при фиксированных максимальном и минимальном потреблениях тока БО и изменения потребления тока БО на освещенном участке орбиты, на фиг. 4 - графики изменения заданного, фактического и расчетного углового положения СБ, периоды измерения и контроля, а также изменения запомненных значений токов, вырабатываемых СБ непосредственно перед и в момент коррекции расчетного углового положения СБ.
Предлагаемый способ управления ориентацией солнечной батареи низкоорбитального космического аппарата по вырабатываемому току реализуется следующим образом.
На борт КА устанавливают устройство поворота СБ с угловой скоростью вращения, двукратно и более превышающей угловую скорость вращения КА вокруг Земли. По паспортным данным на устройство поворота СБ либо экспериментальным путем на наземных стендах оборудования определяют углы разгона и торможения СБ. Кроме того, по результатам экспериментов на наземных стендах определяют максимальные значения токов, вырабатываемых СБ при работе БО в режимах минимального и максимального потребления тока. Задают угол срабатывания СБ, при котором формируется сигнал рассогласования между заданным и расчетным углами, более суммы углов разгона и торможения и менее угла 45°. Задают угол отпускания СБ, при котором прекращается формирование сигнала рассогласования между заданным и расчетным углами, менее угла срабатывания. Задают диапазон времени определения положения СБ на освещенном участке орбиты не менее отношения угла 360° к угловой скорости СБ с минимальным изменением токов потребления БО. Задают максимально допустимый угол анализа токов:

где: Δαmax - максимально допустимый угол анализа токов;
ωка - угловая скорость КА;
ωсб - угловая скорость СБ;
Iсб - текущее значение тока, формируемого СБ;
Imaxm - максимальный ток, вырабатываемый СБ при фиксированном минимальном потреблении тока БО на освещенном участке орбиты;
Iмф - максимальный фоновый ток.
Задают максимально допустимую ошибку определения углового положения СБ более угла отпускания и на порядок и менее от половины максимально допустимого угла анализа. Кроме того, задают максимально допустимый период измерения токов на порядок и менее от половины отношения максимально допустимой ошибки к разности угловых скоростей СБ и КА. На основе справочных данных [1] устанавливают начальное значение максимального фонового тока, обусловленное отраженным излучением Солнца от поверхности Земли, как произведение альбедо поверхности Земли на максимальный ток, вырабатываемый СБ. Вычисляют точность определения положения СБ:

где: Δαфто - фактическая точность определения положения СБ;
ωка - угловая скорость КА;
ωсб - угловая скорость СБ;
Tизм - максимально допустимый период измерения токов;
Δαмдо - максимально допустимая ошибка определения положения СБ.
Кроме того, вычисляют период контроля как отношение фактической точности определения положения СБ к разности угловых скоростей КА и СБ.
Во время полета КА по заданной орбите перед началом функционирования, по результатам экспериментов, путем разворота СБ в различные положения автоматически, либо по командам, выдаваемым, например, из наземного комплекса управления по данным телеметрической информации, корректируют значение максимального фонового тока. Вычисляют фактический угол анализа токов:

где: Δαа - фактический угол анализа токов;
Δαmax - максимально допустимый угол анализа;
Δαфто - фактическая точность определения положения СБ.
Вычисляют интервал анализа токов как отношение фактического угла анализа Δαа к разности угловых скоростей СБ и КА.
Во время функционирования КА на орбите осуществляют определение заданного угла СБ относительно связанных с КА осей координат как положения проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ. Во время вращения СБ вычисляют расчетное угловое положение СБ относительно связанных с КА осей координат как произведение угловой скорости СБ на время вращения. При наличии сигнала рассогласования между заданным и расчетным угловым положением СБ осуществляют ее вращение с фиксированной угловой скоростью в направлении уменьшения рассогласования по кратчайшему пути между заданным и расчетным углами до момента прекращения формирования сигнала рассогласования.
В диапазоне времени определения положения СБ задают ее вращение в направлении изменения заданного угла. Во время вращения вырабатываемый СБ ток повышается до момента совпадения нормали к рабочей поверхности СБ с проекцией вектора направления на Солнце на плоскость ее вращения, а затем начинает снижаться. На каждом периоде контроля сравнивают первую и вторую половины сумм измеренных токов, полученных на интервале анализа токов, предшествующем текущему периоду контроля. Если на текущем периоде контроля сумма измеренных токов превышает, а на предыдущем периоде указанная сумма не превышает произведение максимального фонового тока на число измеренных токов на указанном периоде, начинают вычислять угловую поправку к заданному углу, как:
Δαпопр=0,5·(Tк+Δtа)·(ωсб-ωка),
где: Δαпопр - угловая поправка к заданному углу;
Δtа - интервал анализа вырабатываемого тока;
Tк - интервал контроля.
Учитывая изменения тока во время вращения СБ, вторая половина суммы измеренных токов, полученной на интервале анализа токов, предшествующем текущему периоду контроля, первоначально превышает первую по величине, а затем знак сравнения изменяется и становится менее первой половины. В момент изменения на текущем периоде контроля токов знака сравнения половин указанных сумм токов задают значение расчетного угла как сумму заданного угла и угловой поправки, если заданный угол изменяется в направлении увеличения угла, или как их разность, если заданный угол изменяется в противоположном направлении, при этом задают вращение СБ по указанному выше рассогласованию между заданным и расчетным углами. Прекращают вращение СБ в момент входа КА в теневой участок орбиты, при этом обнуляют все запомненные значения токов.
На фиг. 1 представлены положения КА с установленной на нем СБ в моменты входа и выхода из теневого участка орбиты Земли, где:
1, 3 - положения КА соответственно в моменты входа и выхода из теневого участка орбиты Земли;
2, 4 - положения панели СБ соответственно в моменты входа и выхода из теневого участка орбиты Земли;
5 - Земля;
6 - центр Земли;
7 - орбита КА;
8 - направление излучения Солнца;
9 - теневой участок орбиты Земли;
ωка - угловая скорость вращения КА относительно центра Земли;
ωсб - угловая скорость вращения СБ относительно связанной системы координат КА;
Xка, Yкa, Zкa - оси связанной с КА системы координат в моменты входа и выхода из теневого участка орбиты;
Nсб - направления нормали к рабочей поверхности СБ в моменты входа и выхода из теневого участка орбиты;
Nс - направление проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ в моменты входа и выхода из теневого участка орбиты;
Δαсб - угол рассогласования между указанными выше нормалью и направлением проекции.
КА, положения которого показаны в точках 1 и 3, вращается по орбите 7 вокруг Земли 5 с угловой скоростью ωка. Ось крена Yкa КА направлена по касательной к орбите 7, при этом ось рыскания Xка направлена к центру Земли 6, а ось тангажа Zкa перпендикулярно плоскости орбиты 9 вверх. В положении 1 КА входит, а в положении 3 выходит из теневого участка 9 орбиты 7, при этом в поз. 8 показано направление излучения Солнца. Нормаль Nсб к рабочей поверхности СБ в положении 2, в момент прекращения вращения СБ, совпадает с единичным вектором направления на Солнце, а в положении 4, в момент выхода из теневого участка орбиты, отличается на угол Δαсб. В положении 3 начинается вращение СБ из положения 4 с угловой скоростью ωсб в направлении уменьшения угла рассогласования.
Как правило, на борту КА, функционирующих на низких орбитах, используют электромеханический привод, на котором закреплена СБ, с угловой скоростью вращения выходного вала, в два и более раза превышающей угловую скорость вращения КА вокруг Земли, то есть:

где: ωсб - угловая скорость вращения СБ;
ωка - угловая скорость вращения КА вокруг Земли.
Во время испытаний КА на наземных стендах или по паспортным данным определяют углы разгона и торможения СБ, закрепленной на выходном валу электромеханического привода.
Задают угол срабатывания как рассогласование между заданным (αзад) и расчетным (αр) угловым положением СБ, то есть Δαср=|αзад-Δαр|, при превышении которого начинается вращение СБ в диапазоне:

где: Δαразг - угол разгона СБ;
Δαторм - угол торможения СБ;
Δαср - угол срабатывания СБ.
Затем задают угол отпускания СБ между заданным и расчетным угловым положением СБ, при котором прекращается вращение СБ, в диапазоне:

где: Δαотп - угол отпускания СБ.
Во время полета КА по заданной орбите выполняется периодический разворот СБ в направлении изменения заданного угла, при этом, если рассогласование между заданным и расчетным углами СБ достигает угла срабатывания, осуществляется разворот панели СБ по кратчайшему пути в направлении его уменьшения с фиксированной угловой скоростью до достижения угла отпускания. Во время вращения осуществляют вычисление расчетного углового положения СБ относительно связанных с КА осей координат, как:

где: s - номер периода вращения СБ, где s=1, 2, …;
αсб(s-1) - угловое положение СБ в момент рассогласования расчетного и заданного углов;
αсб(s) - угловое положение после прекращения s-того вращения СБ;
Δts - время s-того вращения СБ.
Для реализации предлагаемого способа управления КА на наземных стендах оборудования, а также во время функционирования КА на орбите на основании телеметрической информации анализируют зависимость величины тока, вырабатываемого СБ при различных положениях относительно направления на Солнце. Кроме того, определяют зависимость величины тока от режимов работы БО. При выполнении экспериментов на орбите из наземного комплекса управления производят выдачу команд на изменение положения СБ и переключение режимов работы БО, которые поступают БСУ КА через бортовой радиотехнический комплекс. Расчетным путем, а также в результате анализа телеметрической информации определяют моменты входа и выхода КА из теневого участка орбиты, а также зависимость величины формируемого СБ тока от указанных выше факторов.
Во время полета КА по заданной орбите ток, вырабатываемый СБ, кроме положения СБ относительно направления на Солнце, зависит от величины нагрузки, то есть тока потребления БО КА. Изменения нагрузки могут быть длительными при установившихся режимах работы либо кратковременными, возникающими в моменты переключения режимов работы БО. Указанная величина тока зависит также от меняющейся интенсивности излучения Солнца, воздействующего на рабочую поверхность СБ. Кроме того, на тракты поступления информации от измерительных элементов тока в БСУ могут воздействовать заряды статического электричества, накапливаемые на борту КА, которые также могут приводить к искажению информации в моменты разряда.
На фиг. 2 представлены графики изменения заданного и фактического углового положения СБ, вырабатываемого тока а также периодов контроля указанного тока, где:
α - угол;
Iсб - вырабатываемый СБ ток;
Uк - напряжение;
t - время;
Iмф - максимальное значение фонового тока;
αзад - заданное угловое положение СБ;
αф - фактическое угловое положение СБ;
αр - расчетное угловое положение СБ;
Tк - период контроля величины тока;
Δta - интервал анализа вырабатываемого тока;
10-11 - интервал времени, соответствующий периоду контроля, на котором вырабатывается максимальный фоновый ток;
12, 23 - моменты рассогласования 90° между фактическим и заданным углами СБ;
13-14, 13-14, 21-22 - интервалы времени, соответствующие периодам контроля;
14-16, 18-20 - интервалы запоминания токов;
16, 19 - середины интервалов запоминания токов до и после совпадения фактического и заданного углов.
Основной задачей является определение момента «равновесия» суммарного тока на заданном фиксированном интервале времени во время вращения СБ. В процессе вращения СБ на освещенном участке орбиты с заданным периодом измеряют вырабатываемый ею ток, при этом на каждом периоде контроля Tк вычисляют суммарный ток, представленный на графике Uк, как сумму токов в течение фиксированного интервала времени, соответствующего интервалу анализа Δta.
На интервале 10-11 при рассогласовании между заданным αзад и фактическим αф углами более 90° СБ вырабатывает максимальный фоновый ток Iмф. В момент 12 рассогласование между заданным αзад и фактическим αф углами СБ достигает 90°.
Принимают суммарный пороговый ток за время одного периода контроля как:

где: IΣпф - суммарный пороговый ток за время одного периода контроля;
Iмф - максимальное значение фонового тока;
Tк - период контроля тока.
На интервале 13-14, равном периоду контроля Tк, суммарный ток, вырабатываемый СБ, не превышает порогового значения, то есть выполняется условие:

где: IΣ(13-14) - суммарный ток, вырабатываемый СБ на интервале 13-14.
На интервале 14-15, равном периоду контроля Tк, суммарный ток превышает пороговое значение, то есть:
где: IΣ(14-15) - суммарный ток, вырабатываемый СБ на интервале 14-15.
Момент 16 является серединой интервала 14-17, при этом на данном интервале, равном интервалу анализа вырабатываемого тока Δta, вырабатываемый СБ ток увеличивается, при этом:

где: IΣ(14-16) - суммарный ток, вырабатываемый СБ на интервале 14-16;
IΣ(16-17) - суммарный ток, вырабатываемый СБ на интервале 16-17.
Момент 19 является серединой интервала 18-20, при этом на данном интервале, равном интервале анализа вырабатываемого тока Δta, вырабатываемый СБ ток уменьшается, при этом:

где: IΣ(18-19) - суммарный ток, вырабатываемый СБ на интервале 18-19;
IΣ(19-20) - суммарный ток, вырабатываемый СБ на интервале 19-20.
На интервале 21-22, равном периоду контроля Tк, суммарный ток, вырабатываемый СБ, вновь уменьшается до порогового значения и менее, то есть выполняется условие:

где: IΣ(21-22) - суммарный ток, вырабатываемый СБ на интервале 21-22.
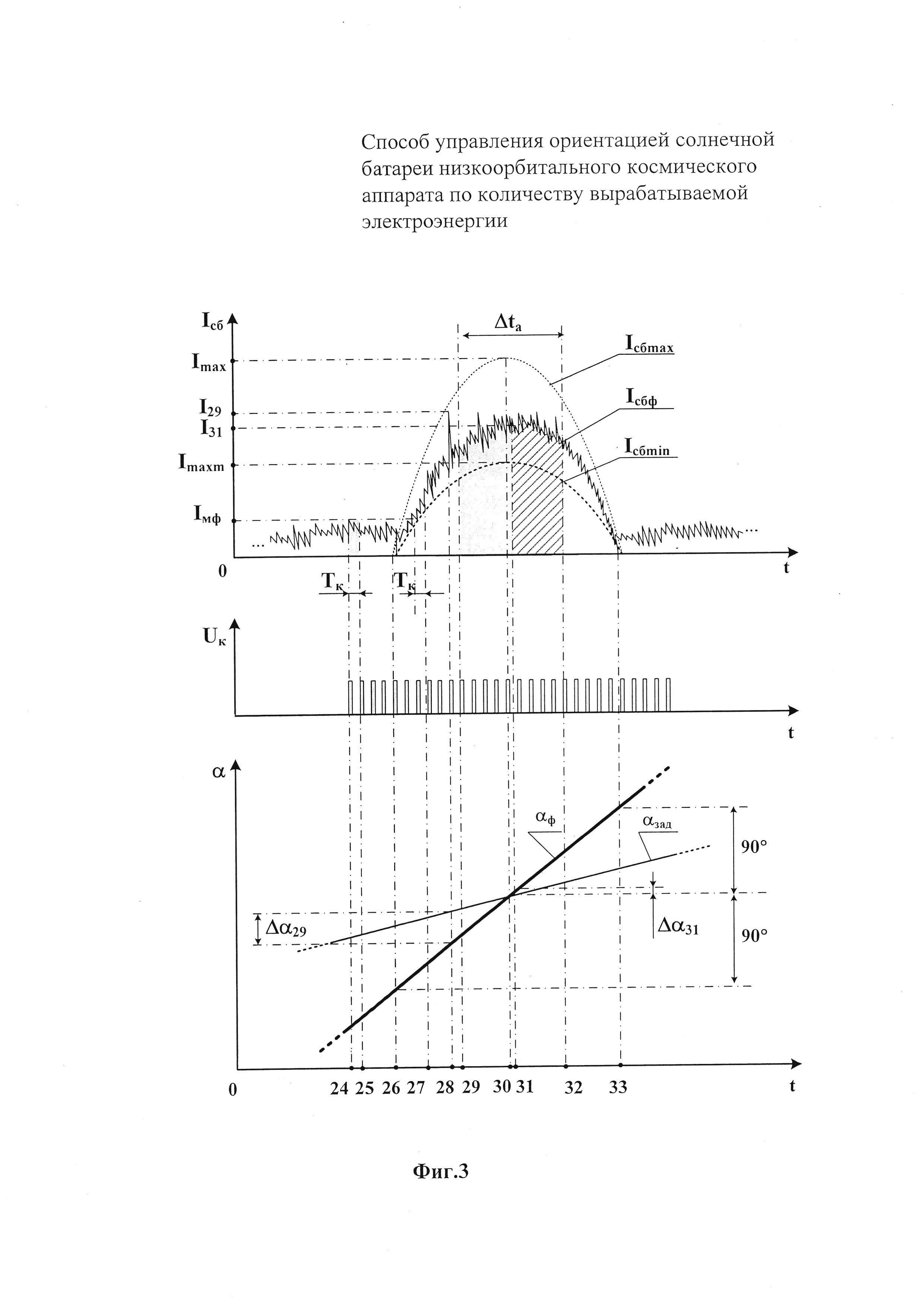
На фиг. 3 представлены графики соответствия изменения заданного и фактического углового положения СБ вырабатываемому ею току во время вращения при фиксированных максимальном и минимальном потреблениях тока БО и изменения потребления тока БО на освещенном участке орбиты,
где: Iсб - ток, вырабатываемый СБ;
α - угол;
t - время;
Iсбmax, Iсбmin - графики изменения вырабатываемого СБ тока при фиксированных максимальной и минимальной нагрузках и отсутствии изменений интенсивности излучения Солнца;
Iсбф - график изменения вырабатываемого СБ тока при изменениях нагрузки и наличии изменения интенсивности излучения Солнца;
Imax - максимальный ток, вырабатываемый СБ при фиксированном максимальном потреблении тока БО на освещенном участке орбиты;
Imaxm - максимальный ток, вырабатываемый СБ при фиксированном минимальном потреблении тока БО на освещенном участке орбиты;
Iмф - максимальное значение фонового тока;
I29 - значение вырабатываемого СБ тока в момент 29;
I31 - значение вырабатываемого СБ тока в момент 31;
Δta - интервал анализа вырабатываемого тока;
αзад - заданный угол;
αф - фактическое угловое положение СБ;
Δα29 - угол рассогласования между заданным и фактическим угловым положением СБ в момент 29;
Δα31 - угол рассогласования между заданным и фактическим угловым положением СБ в момент 31;
24-25 - интервал времени при рассогласовании заданного и фактического углового положения СБ более 90°, на котором СБ вырабатывает максимальный ток;
26, 33 - моменты рассогласования между заданным и фактическим углами, равные 90°;
27 - момент начала контроля;
28 - момент достижения максимального тока;
29-32 - интервал анализа количества электроэнергии;
30 - момент совпадения заданного и фактического углового положения СБ;
31 - момент «равновесия» вырабатываемого СБ количества электроэнергии.
В процессе экспериментов на наземных стендах с реальной СБ путем изменения ее положения относительно источника излучения определяют изменение вырабатываемого СБ тока при фиксированных максимальной и минимальной нагрузках, соответствующих максимальному Iсбmax и минимальному Iсбmin току потребления БО, установленного на КА.
Во время полета КА по орбите определяют максимальный фоновый ток Iмф, обусловленный отраженным от поверхности Земли излучением Солнца на освещенном участке орбиты при разворотах СБ относительно направления на Солнце на угол более 90°.
На графиках Iсбmax и Iсбmin показано изменение вырабатываемого СБ тока при фиксированных максимальной и минимальной нагрузках, при отсутствии влияния на него внешних воздействий, обусловленных изменением интенсивности излучения Солнца и статическими разрядами. Вырабатываемые СБ токи достигают соответствующих максимальных величин Imax и Imaxm в момент 30 совпадения фактического αф и заданного αзад угловых положений СБ. В моменты 26 и 33, при рассогласовании 90° между фактическим αф и заданным αзад углами, вырабатываемые СБ токи на графиках Iсбmax и Iсбmin имеют нулевые значения.
На графике Iсбф, в качестве примера, показано изменение тока, вырабатываемого СБ в процессе функционирования КА на орбите с учетом изменений нагрузки и влияния внешних воздействий. Нестабильные значения вырабатываемого СБ тока обусловлены изменением нагрузки из-за переключения режимов работы БО, в том числе, например, включения и отключения электромагнитных клапанов, реле, нагревателей системы обеспечения теплового режима, приемо-передающей аппаратуры связи с наземным комплексом управления и других. Кроме того, изменения тока могут быть обусловлены внешними воздействующими факторами, к которым можно отнести изменения интенсивности излучения Солнца, статические разряды, периодически возникающие в результате накопления статического электричества на поверхности БО и другими факторами. Внешние воздействия, влияющие на вырабатываемый СБ ток являются кратковременными, случайными и значительного влияния на суммарный ток, вырабатываемый СБ, не оказывают.
Фоновый ток достигает максимального значения Iмф на периоде контроля Tк, равном интервалу 24-25. Пороговый суммарный ток IΣпф задают как произведение указанного интервала на максимальный фоновый ток в соответствии с формулой (6). В момент 27 вырабатываемый СБ суммарный ток на интервале контроля превышает пороговое значение. Изменения тока, обусловленные переключением режимов работы БО, ограничены графиками Iсбmax и Iсбmin. Таким образом, вырабатываемый СБ ток, как правило, находится в диапазоне:

где: Δαрасс - текущий угол рассогласования между заданным и фактическим положением СБ;
Iсб - текущее значение тока, формируемого СБ.
При управлении ориентацией СБ непосредственно по величине формируемого ею тока ошибка определения угла может достигать значительной величины, в связи с чем определение положение СБ по максимальному току непосредственно по формуле (1) может привести к значительным ошибкам. Максимальное значение тока I29 на графике Iсбф достигается в момент 31, в момент включения нагрузки на короткий промежуток времени, при этом рассогласование между заданным и фактическим углами равно Δα29. Фактически максимальный ток в соответствии с формулой (1) должен достигаться в момент 30, при совпадении заданного αзад и фактического αф углов. Поскольку величина вырабатываемого СБ тока меняется в соответствии с изменением нагрузки, обусловленной переключением режимов работы БО, то при определении положения СБ непосредственно по величине вырабатываемого СБ тока в соответствии с формулой (1) возможны значительные ошибки, обусловленные нестабильностью указанного тока.
Количество тока, выработанного СБ на освещенном участке орбиты во время ее вращения в течение фиксированного интервала времени, отсчитанного до каждого текущего момента, зависит, главным образом, от величины освещенности панели СБ излучением Солнца. При этом указанное количество тока может быть рассчитано по формуле:
 ,
,
где: IΔt - количество тока, вырабатываемого СБ в течение интервала времени Δt;
Δt - фиксированный интервал времени;
I - текущее значение тока;
t - текущий момент времени.
При этом

где: ωсб - угловая скорость СБ.
Поскольку во время вращения на освещенном участке орбиты КА ток СБ изменяется по формуле (1), необходимо определить момент времени, при котором на фиксированном интервале времени Δt, отсчитанном до текущего момента, количество тока IΔt начинает уменьшаться после достижения максимальной величины. На практике, вместо интеграла, при определении количества тока, целесообразно использовать сумму токов, так как ток измеряется системой управления КА, как правило, с фиксированной частотой.
На интервале 29-32, в момент 31 площади фигур, образованные графиком Iсбф на интервалах 29-31 и 31-32, равны между собой. Фактическое угловое положение СБ в момент 30 отличается от ее положения в момент 31 на угол Δα31.
При фиксированной нагрузке и отсутствии внешних воздействующих факторов сумма токов на интервале 29-32, учитывая формулу (1), может быть определена формулой:

где: j - номер периода измерения на фиксированном интервале, где j=1, 2, …, k;
Iсумм(29-32) - сумма токов при отсутствии изменения нагрузки и влияния внешних воздействующих факторов.
Изменения тока, обусловленные переключением режимов работы БО и внешними воздействиями, носят кратковременный характер и не оказывают значительного влияния на сумму токов на интервале 29-32, так как составляют незначительную часть от нее, то есть:

Таким образом, кратковременные изменения тока не оказывают значительного влияния на сумму токов, а следовательно и угла Δα31 рассогласования между заданным и фактическим угловым положением СБ в момент 31.
Для определения количества электроэнергии, вырабатываемого СБ, необходимо учитывать взаимное изменение угловых скоростей КА и СБ, а также исключить влияние фонового тока, при этом задают максимально допустимый угол анализа:

где: Δαmax - максимально допустимый угол анализа;
ωка - угловая скорость КА;
ωсб - угловая скорость СБ;
Iсб - текущее значение тока, формируемого СБ;
Imaxm - максимальный ток, вырабатываемый СБ при фиксированном минимальном потреблении тока БО на освещенном участке орбиты;
Iмф - максимальный фоновый ток.
Вычисляют максимальное время контроля:

Задают максимально допустимую ошибку определения положения СБ в диапазоне:

где: Δαмдо - максимально допустимая ошибка определения положения СБ;
Δαотп - угол отпускания.
Задают максимально допустимый период измерения токов:
где: Tизм - максимально допустимый период измерения токов.
Вычисляют коэффициент кратности периода измерения токов:

где: n - коэффициент кратности периода контроля, целое число.
Вычисляют точность определения положения СБ:

где: Δαфто - фактическая точность определения положения СБ.
Вычисляют период контроля:

Вычисляют коэффициент кратности угла анализа:

где: m - коэффициент кратности угла контроля, целая величина.
Вычисляют фактический угол анализа:

где: Δαа - фактический угол анализа.
Вычисляют максимальное количество запоминаемых значений токов:

где: k - максимальное количество запоминаемых токов.
Для запоминания измеренных токов в бортовой вычислительной машине выделяют область памяти объемом, равным максимальному количеству k. Измерение и запоминание токов осуществляют под управлением бортового программного обеспечения, которое осуществляют в порядке поступления, по принципу, первым пришел - первым ушел. Если очередное измеренное значение тока перед запоминанием превышает максимальное количество запоминаемых токов k, то первое по времени запомненное значение тока после сдвига удаляется, то есть:

где: Iзап1, Iзап2, …, Iзап(k-2) Iзап(k-1), Iзап(k) - запомненные значения тока;
Iизм - текущее измеренное значение тока.
На фиг. 4 представлены графики изменения заданного, фактического и расчетного углового положения СБ, периоды измерения и контроля, а также изменения запомненных значений тока, вырабатываемых СБ непосредственно перед и в момент коррекции расчетного углового положения СБ, где:
α - угол;
t - время;
αзад - заданный угол;
αф - фактический угол СБ;
αр - расчетный угол СБ;
Uи - напряжение, на графике периодов измерения;
Uк - напряжение, на графике периодов контроля;
Tк - период контроля количества электроэнергии;
Tизм - период измерения токов;
Iсб(40), Iсб(41) - графики изменения тока и области запомненных значений токов, формируемых СБ на периодах контроля в моменты 40 и 41, соответственно;
Δta - интервал анализа вырабатываемого тока;
Δαпопр - угловая поправка к расчетному углу;
α37, α38, α39 - угловые положения СБ в моменты 37, 38, 39 соответственно;
αp(39), αф(39), αзад(39), - соответственно, расчетный, фактический и заданный углы в момент 39;
34 - момент достижения угла рассогласования между заданным и фактическим углами 90°;
35, 36 - моменты начала запоминания токов;
37, 38 - середины интервалов запоминания токов;
40, 41 - моменты окончания запоминания токов;
38 - момент совпадения фактического и заданного углового положения СБ.
Начиная с момента выхода КА из теневого участка орбиты, СБ вращается в направлении заданного угла αзад, при этом фактический угол αф начинает изменяться. На теневом и освещенном участках орбиты СБ вырабатывает фоновый ток из-за попадания на рабочую поверхность панели СБ отраженного излучения Солнца от поверхности Земли. В результате экспериментов, по данным телеметрической информации, передаваемой в наземный комплекс управления, путем анализа токов при различных положениях СБ определяют максимальный фоновый ток Iмф как наибольшее значение тока, вырабатываемого СБ при отклонении ее нормали от проекции на угол более 90°.
До момента 34, при рассогласовании между заданным αзад и фактическим αф угловыми положениями СБ более 90° наблюдается фоновый ток. Далее наблюдаются повышение тока и кратковременные изменения тока, обусловленные переключением режимов работы БО.
После начала вращения СБ начинают вычислять сумму запомненных токов:

где IΣI - сумма запомненных токов на i-том периоде контроля;
Ii(1), …, Ii(j), …, Ii(n) - значения n измеренных токов на i-том периоде контроля.
Формируют первый сигнал разрешения s1=1 и начинают запоминание сумм токов на интервалах анализа токов Δtа при выполнении условий:

Формируют второй сигнал разрешения s2=1, продолжают запоминание и начинают анализ сумм токов на интервалах анализа токов Δta при выполнении условий:

Сбрасывают сигналы разрешения, 2·n·m запомненных значений токов на интервалах анализа токов Δtа, то есть s1=0, s2=0, при выполнении условий:


где: sзi - запомненное значение сигнала сравнения полученного i-том периоде контроля.
Контролируют момент «равновесия» суммы токов при наличии сигналов разрешения, то есть при s1=1 и s2=1. Контроль заключается в сравнении с периодом Tк суммы токов, выработанных СБ в первой и второй половинах интервала анализа вырабатываемого тока Δta. На графике Iсб(40) в момент 40 в памяти сохраняются значения токов, выработанных СБ на интервале анализа Δta, начало которого соответствует моменту 35, а окончание моменту 40. На графике Iсб(41) в момент 41 в памяти сохраняются запомненные значения токов СБ на интервале времени анализа Δta, начало которого соответствует моменту 36, а окончание моменту 41.
На каждом i-том периоде контроля вычисляют первую и вторую суммы запомненных токов:


где: IΣ1(i) - первая сумма запомненных токов на i-том периоде контроля;
IΣ2(i) - вторая сумма запомненных токов на i-том периоде контроля;
I1(i), …, I(i-2·m) - запомненные значения тока на i-том периоде контроля.
Сравнивают первую и вторую суммы запомненных токов на текущем периоде и формируют сигнал сравнения на текущем периоде контроля при ненулевом значении запомненного на предыдущем цикле контроля сигнала сравнения, после чего, в случае их равенства, запоминают сигнал сравнения:
при Sз(i-1)>0,
IΣ1(i)>IΣ2(i), то Sсрi=1, иначе, если IΣ1(i)≤IΣ2(i), то Sсрi=2,
при этом, если Sз(i-1)=Sсрi, то 
где: sсрi - значение сигнала сравнения, полученного на i-том периоде контроля;
sз(i-1), sзi - запомненное значение сигнала сравнения, полученного i-том периоде контроля.
Если на предыдущем периоде контроля первая сумма превышает вторую, а на текущем периоде вторая сумма не менее первой, то есть если:

то вычисляют угловую поправку к заданному углу как:

где: Δαпопр - угловая поправка к заданному углу.
Если заданный угол изменяется в направлении увеличения угла, то задают значение расчетного угла как:

Иначе, если заданный угол изменяется в направлении уменьшения угла, то задают значение расчетного угла как:

Далее задают вращение СБ по указанному выше рассогласованию между заданным и расчетным углами. Прекращают вращение СБ в момент входа КА в теневой участок орбиты, при этом обнуляют все запомненные значения сигналов, запомненный номер суммы и суммы токов:

Преимуществами предлагаемого способа управления по расчетному углу являются:
- расширение функциональных возможностей известного способа управления ориентацией СБ по току;
- минимизация времени на установку СБ в рабочее положение за счет сведения к минимуму количества коррекций расчетного угла;
- уменьшение влияния колебаний тока, вызванного переключением режимов работы бортовых систем-потребителей электроэнергии СБ;
- исключение затрат электроэнергии при нахождении СБ на теневом участке орбиты.
Предлагаемый способ позволяет:
- повысить надежность функционирования тракта управления ориентацией СБ, следовательно, увеличить срок службы КА;
- сократить объем оборудования за счет исключения датчика положения СБ.
Источники информации
1. Г. Раушенбах «Справочник по проектированию солнечных батарей», М., Энергоатомиздат, 1983 г., с. 73, 272.
2. Патент 2465179, B64G 1/44, 27.10.2012.
Способ управления ориентацией солнечной батареи низкоорбитального космического аппарата по вырабатываемому току, заключающийся в том, что определяют заданный угол солнечной батареи относительно связанных с космическим аппаратом осей координат как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, определяют углы разгона и торможения солнечной батареи, задают угол срабатывания, при котором формируется сигнал рассогласования между заданным и расчетным углами более суммы углов разгона и торможения и менее угла 45°, задают угол отпускания солнечной батареи, при котором прекращается формирование сигнала рассогласования между заданным и расчетным углами, менее угла срабатывания, при наличии сигнала рассогласования осуществляют вращение солнечной батареи с фиксированной угловой скоростью в направлении уменьшения рассогласования по кратчайшему пути между заданным и расчетным углами до момента прекращения формирования сигнала рассогласования, вычисляют расчетное угловое положение солнечной батареи относительно связанных с космическим аппаратом осей координат как произведение угловой скорости солнечной батареи на время вращения, отличающийся тем, что задают угловую скорость вращения солнечной батареи, двукратно и более превышающую угловую скорость вращения космического аппарата вокруг Земли, задают диапазон времени определения положения солнечной батареи на освещенном участке орбиты не менее отношения угла 360° к угловой скорости солнечной батареи с минимальным изменением токов потребления бортовым оборудованием, определяют максимальные значения тока, вырабатываемого солнечной батареей при работе бортового оборудования в режимах минимального и максимального потребления тока, устанавливают начальное значение максимального фонового тока, обусловленное отраженным излучением Солнца от поверхности Земли, как произведение альбедо поверхности Земли на максимальный ток, вырабатываемый СБ, корректируют значение максимального фонового тока, задают максимально допустимый угол анализа: где: Δα - максимально допустимый угол анализа;ω - угловая скорость КА;ω - угловая скорость СБ;I - текущее значение тока, формируемого СБ;I - максимальный ток, вырабатываемый СБ при фиксированном минимальном потреблении тока бортовым оборудованием на освещенном участке орбиты;I - максимальный фоновый ток,задают максимально допустимую ошибку определения углового положения солнечной батареи более угла отпускания и на порядок и менее от половины максимально допустимого угла анализа, задают максимально допустимый период измерения токов на порядок и менее от половины отношения максимально допустимой ошибки к разности угловых скоростей солнечной батареи и космического аппарата, вычисляют точность определения положения солнечной батареи: где: Δα - фактическая точность определения положения солнечной батареи;ω - угловая скорость космического аппарата;ω - угловая скорость солнечной батареи;T - максимально допустимый период измерения токов;Δα - максимально допустимая ошибка определения положения солнечной батареи,вычисляют период контроля как отношение фактической точности определения положения солнечной батареи к разности угловых скоростей космического аппарата и солнечной батареи, вычисляют фактический угол анализа: где: Δα - фактический угол анализа,вычисляют интервал анализа токов как отношение фактического угла анализа к разности угловых скоростей солнечной батареи и космического аппарата, в диапазоне времени определения положения солнечной батареи задают ее вращение в направлении изменения заданного угла, на каждом периоде контроля сравнивают первую и вторую половины сумм измеренных токов, полученных на интервале анализа токов, предшествующем текущему периоду контроля, если на текущем периоде контроля сумма измеренных токов превышает, а на периоде, предшествующем первому, указанная сумма не превышает произведение максимального фонового тока на число измеренных токов на указанном периоде, вычисляют угловую поправку к заданному углу:Δα=0,5·(T+Δt)·(ω-ω),где: Δα - угловая поправка к заданному углу;Δt - интервал анализа вырабатываемого тока;T - интервал контроля,в момент изменения знака сравнения половин сумм измеренных токов на текущем периоде контроля токов по сравнению с предыдущим периодом задают значение расчетного угла как сумму заданного угла и угловой поправки, если заданный угол изменяется в направлении увеличения угла, или как их разность, если заданный угол изменяется в противоположном направлении, при этом задают вращение солнечной батареи по указанному выше рассогласованию между заданным и расчетным углами, прекращают вращение солнечной батареи в момент входа космического аппарата в теневой участок орбиты, при этом обнуляют все запомненные значения токов.

Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации

