Результат интеллектуальной деятельности: СПОСОБ ЛОГИЧЕСКОГО УПРАВЛЕНИЯ СЛОЖНЫМ МНОГОСВЯЗНЫМ ДИНАМИЧЕСКИМ ОБЪЕКТОМ
Вид РИД
Изобретение
Изобретение относится к области систем автоматического управления сложными многосвязными динамическими объектами, состоящими из нескольких подсистем и функционирующими в широком диапазоне изменения параметров, и может быть использовано в системах автоматического управления газотурбинными двигателями, энергетическими комплексами, синхронными генераторами и так далее.
Известен способ построения системы нечеткой логики [RU 2417442, МПК G06N 7/02, 2010 г.], при котором сначала формулируют последовательность правил нечеткой логики, затем каждому из этих правил назначают числовую характеристику - показатель качества управления, причем правила нечеткой логики реализованы на базе обученной нейронной сети и каждое из правил нечеткой логики реализуют отдельным фрагментом обученной большой искусственной нейронной сети.
Недостатком такого способа является значительная сложность реализации, обусловленная применением высокопроизводительной техники.
Известен также способ построения четкого логического регулятора [RU 2445669, МПК G05B 13/02, 2011 г.], в котором входные и выходные переменные логического регулятора представлены в виде совокупности четких термов, вследствие чего логическим выводом является один из четких термов регулируемого параметра регулятора, ширина которого определяет точность четкого логического регулятора.
Недостатком такого способа является необходимость в значительном количестве правил нечеткой логики для адекватного управления сложным динамическим объектом на различных режимах функционирования.
Наиболее близким техническим решением, принятым за прототип, является способ, реализуемый нелинейным корректором [АС СССР №124548, кл. 21с, 4650, Бюл. №23, 1959 г.], формирующий корректирующий сигнал на основе анализа динамики подсистемы по сигналу ошибки управления εi(t) и ее производной  .
.
Недостатком прототипа является невысокое качество переходных процессов в подсистемах сложного динамического объекта, обусловленное тем, что не учитывается влияние перекрестных связей.
Задачей, на решение которой направлено заявляемое изобретение, является повышение качества управления сложным многосвязным динамическим объектом, функционирующим в широком диапазоне изменения параметров, с учетом влияния перекрестных связей в объекте управления.
Технический результат, согласно изобретению, заключается в повышении быстродействия и уменьшении перерегулирования в переходном режиме, а также увеличении точности функционирования в установившемся режиме за счет формирования логического корректирующего сигнала для подсистемы в составе сложного многосвязного динамического объекта.
Поставленная задача решается, а технический результат достигается способом логического управления сложным многосвязным динамическим объектом, по которому посредством нелинейного корректора формируют логический корректирующий сигнал на основе анализа динамики подсистемы по сигналу ошибки εi(t) и ее производной
, а также, согласно изобретению, посредством дополнительного нелинейного корректора формируют сигнал логической корректирующей ошибки  , полученный по результатам анализа влияния выбранной максимальной производной y′(t) среди выходных координат j-x подсистем (j=1, …, n, j≠i) на производную
, полученный по результатам анализа влияния выбранной максимальной производной y′(t) среди выходных координат j-x подсистем (j=1, …, n, j≠i) на производную  выходной координаты i-й подсистемы (i=1, …, n), по закону:
выходной координаты i-й подсистемы (i=1, …, n), по закону:
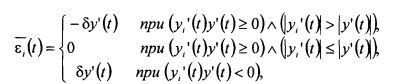
где  ,
,
δ∈(0; 1],
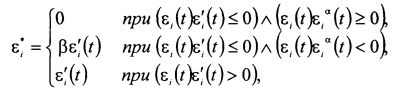
с последующим суммированием полученного сигнала с логическим корректирующим сигналом εi *(t), сформированным по закону:
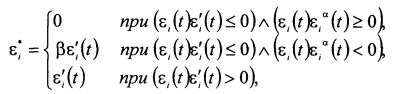
где εi α(t) - значение εi(t) через промежуток времени α, α∈[0,5; 1,5] сек,
β∈(0; 1],
и сигналом ошибки управления εi(t) соответствующей i-й подсистемы, тем самым стабилизируют, координируют и согласовывают все подсистемы и управляют сложным многосвязным динамическим объектом.
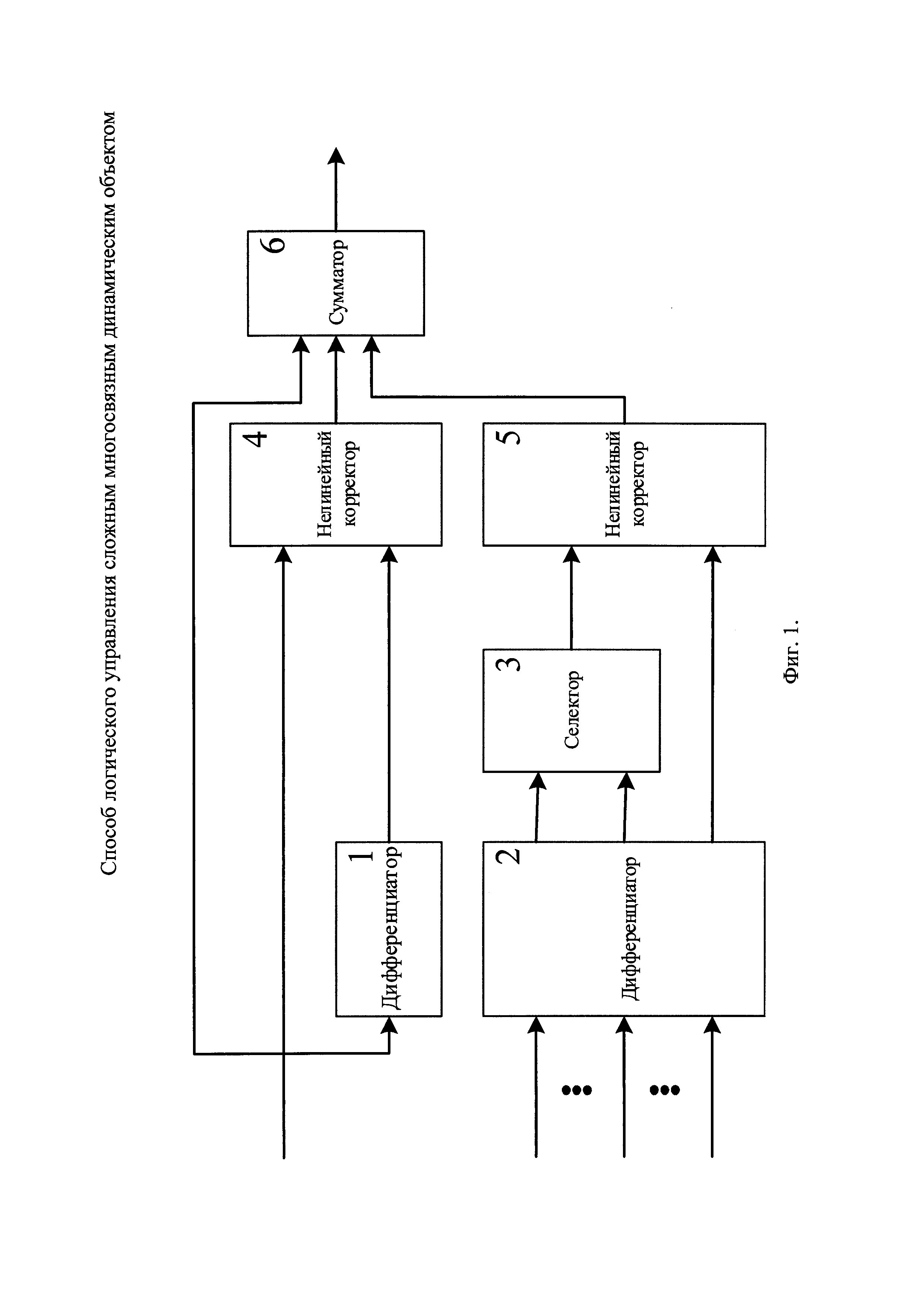
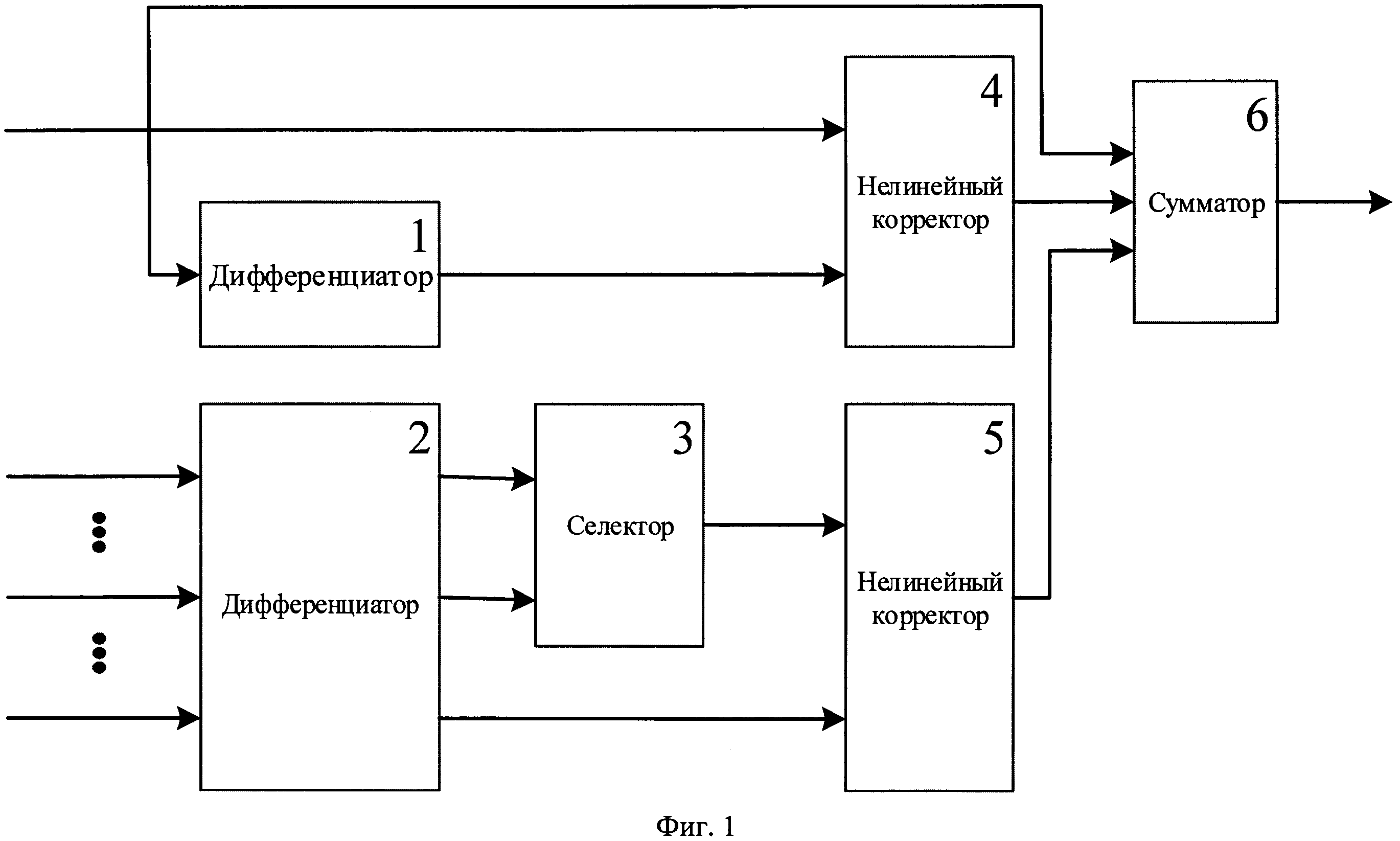
Существо изобретения поясняется чертежами. На фиг. 1 изображена структурная схема нелинейного корректирующего устройства, реализующего предложенный логический способ управления, для i-й (i=1, …, n) подсистемы в составе сложного многосвязного динамического объекта.
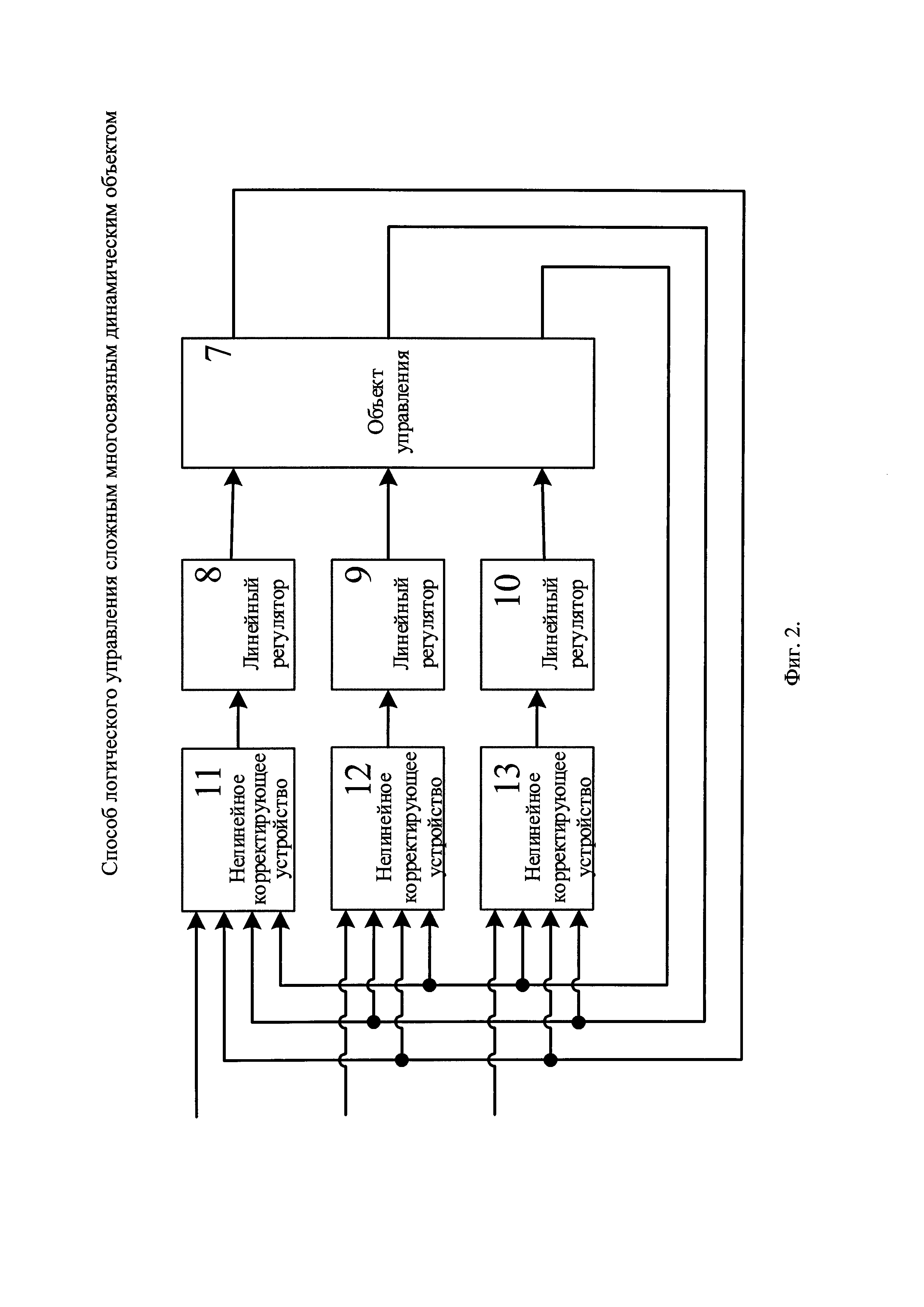
На фиг. 2 изображена структурная схема многосвязной системы автоматического управления газотурбинным двигателем с помощью нелинейных корректирующих устройств, реализующих предложенный способ логического управления, в каждой подсистеме.
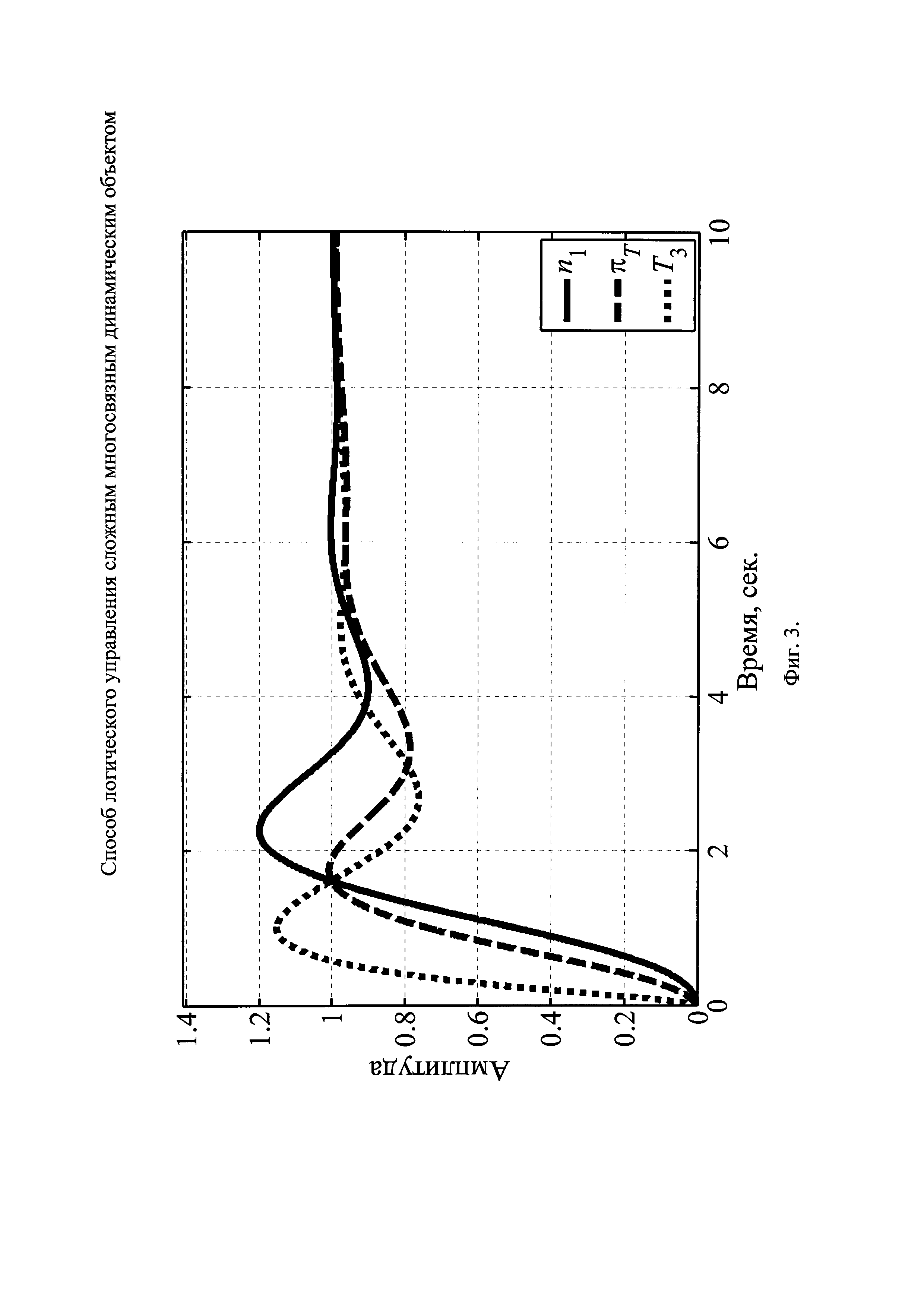
На фиг. 3 изображены графики переходных процессов подсистем в составе многосвязной системы автоматического управления газотурбинным двигателем на режиме P1 (Н=10 км, V=1.2 М) без нелинейных корректирующих устройств при единичном ступенчатом входном воздействии.
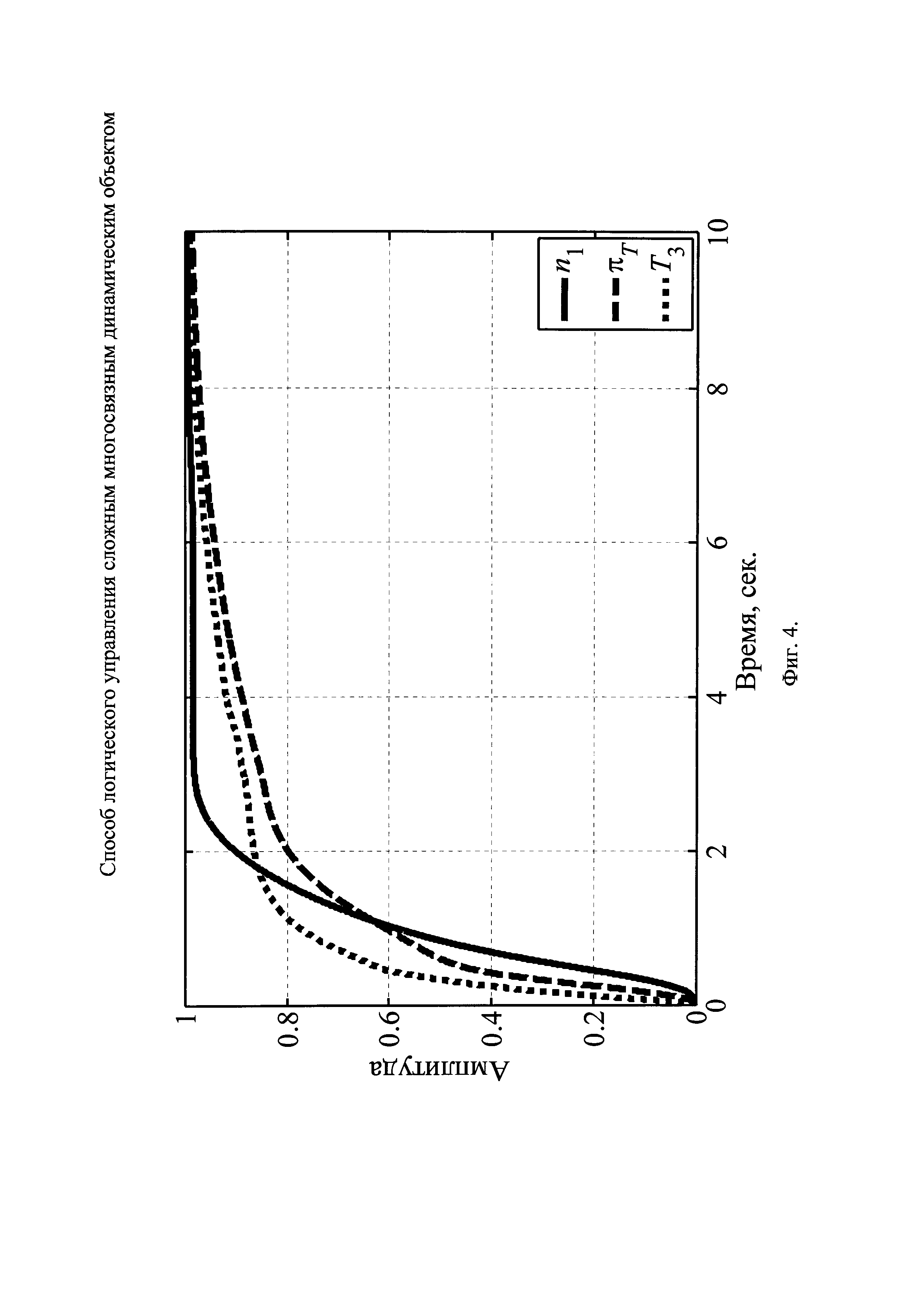
На фиг. 4 изображены графики переходных процессов подсистем в составе многосвязной системы автоматического управления газотурбинным двигателем на режиме P1 (Н=10 км, V=1.2 М) с нелинейными корректирующими устройствами при единичном ступенчатом входном воздействии.
Нелинейное корректирующее устройство (фиг. 1), реализующее предложенный логический способ управления, для i-й подсистемы в составе сложного многосвязного динамического объекта содержит дифференциаторы 1 и 2, селектор 3, нелинейный корректор, реализующий логический закон управления подсистемой 4, нелинейный корректор, реализующий логический закон управления связями 5, сумматор 6.
Многосвязная система автоматического управления газотурбинным двигателем с помощью нелинейных корректирующих устройств (фиг. 2) содержит объект управления 7, включающий в себя газотурбинный двигатель с исполнительными механизмами, линейные регуляторы 8-10 и нелинейные корректирующие устройства 11-13.
Нелинейное корректирующее устройство (фиг. 1), реализующее способ логического управления сложным многосвязным динамическим объектом, работает следующим образом.
На вход дифференциатора 1 поступает сигнал ошибки управления εi(t) в i-й подсистеме, соответствующий разнице между заданным значением и текущем значением управляемой координаты, а с выхода сигнал производной по ошибке управления
поступает на вход нелинейного корректора, реализующего логический закон управления i-й подсистемой 4.
На вход дифференциатора 2 поступают сигналы выходных координат Y(t) со всех n подсистем в составе сложного динамического объекта. С выхода дифференциатора 2 производная
выходной координаты i-й подсистемы (i=1, …, n) поступает на вход нелинейного корректора, реализующего логический закон управления связями 5, а производные  выходных координат j-x (j=1, …, n, j≠i) сепаратных подсистем поступают на вход селектора 3.
выходных координат j-x (j=1, …, n, j≠i) сепаратных подсистем поступают на вход селектора 3.
На вход селектора 3 поступают вышеописанные производные  выходных координат j-x (j=1, …, n, j≠i) сепаратных подсистем. Селектор 3 определяет наибольшую производную y′(t) среди входных сигналов и передает выбранный сигнал на вход нелинейного корректора, реализующего логический закон управления связями 5.
выходных координат j-x (j=1, …, n, j≠i) сепаратных подсистем. Селектор 3 определяет наибольшую производную y′(t) среди входных сигналов и передает выбранный сигнал на вход нелинейного корректора, реализующего логический закон управления связями 5.
На вход нелинейного корректора 4, реализующего логический закон управления подсистемой, поступает вышеописанный сигнал ошибки управления εi(t) в i-й подсистеме и его производная
, полученная с выхода дифференциатора 1. Нелинейный корректор 4, реализующий логический закон управления подсистемой, проводит логический анализ входных сигналов в соответствии с логическим законом управления и формирует логическую корректирующую ошибку εi *(t), которая поступает на вход сумматора 6.
Принцип работы нелинейного корректора 4 заключается в реализации логического закона управления подсистемой на основе сигнала ошибки управления εi(t) и его производной
.
Когда модуль ошибки  увеличивается (что соответствует
увеличивается (что соответствует  ), то подсистема удаляется от положения равновесия и необходимо стабилизировать динамику ее переходного процесса введением производной по ошибке управления
.
), то подсистема удаляется от положения равновесия и необходимо стабилизировать динамику ее переходного процесса введением производной по ошибке управления
.
Если же модуль ошибки  уменьшается (что соответствует
уменьшается (что соответствует  ), то система движется к положению равновесия и необходимо проводить оценку с учетом динамики изменения сигнала ошибки. Обозначим через εi α(t) значение ошибки εi(t) через промежуток времени α (α∈(0,5; 1,5] сек):
), то система движется к положению равновесия и необходимо проводить оценку с учетом динамики изменения сигнала ошибки. Обозначим через εi α(t) значение ошибки εi(t) через промежуток времени α (α∈(0,5; 1,5] сек):

Если текущее значение ошибки εi(t) и значение ошибки εi α(t) будут одного знака (что соответствует εi α(t)εi(t)≥0), то ошибка εi(t) приближается к положению равновесия и воздействие не требуется. Когда же текущее значение ошибки εi(t) и значение ошибки εi α(t) будут разных знаков (что соответствует εi α(t)εi(t)<0), то необходимо стабилизировать динамику ошибку εi(t) введением производной по ошибке
с некоторым коэффициентом  , где β некоторый коэффициент (β∈(0; 1]), так как подсистема находится вблизи от положения равновесия.
, где β некоторый коэффициент (β∈(0; 1]), так как подсистема находится вблизи от положения равновесия.
Таким образом, нелинейный корректор 4 формирует логическую корректирующую ошибку εi *(t) для i-й подсистемы, направленную на стабилизацию подсистемы, по следующему закону:

На вход нелинейного корректора, реализующего логический закон управления связями 5, поступает вышеописанный сигнал наибольшей производной y′(t) с селектора 3 и производная
выходной координаты i-й подсистемы (i=1, …, n) с дифференциатора 2. Нелинейный корректор, реализующий логический закон управления связями 5, проводит логический анализ входных сигналов в соответствии с логическим законом управления и формирует логическую корректирующую ошибку
, которая поступает на вход сумматора 6.
Принцип работы нелинейного корректора 5 заключается в реализации логического закона управления связями на основе вышеописанных сигналов
и y′(t).
Когда динамика выходной координаты i-й подсистемы и наибольшая динамика y′(t) среди j-x подсистем изменяются в противоположных направлениях (что соответствует  ), то подсистемы не скоординированы между собой и «мешают» друг другу в достижении цели функционирования. В таком случае необходимо форсировать движение в i-й подсистеме добавлением δy′(t), где δ - некоторый коэффициент (δ∈(0; 1]). В случае, когда динамика выходной координаты i-й подсистемы и наибольшая динамика y′(t) среди j-x подсистем изменяются в одном направлении (что соответствует
), то подсистемы не скоординированы между собой и «мешают» друг другу в достижении цели функционирования. В таком случае необходимо форсировать движение в i-й подсистеме добавлением δy′(t), где δ - некоторый коэффициент (δ∈(0; 1]). В случае, когда динамика выходной координаты i-й подсистемы и наибольшая динамика y′(t) среди j-x подсистем изменяются в одном направлении (что соответствует  ), то подсистемы не согласованы между собой и необходимо сравнивать их динамики. Если абсолютная скорость изменения
), то подсистемы не согласованы между собой и необходимо сравнивать их динамики. Если абсолютная скорость изменения  выходной координаты i-й сепаратной подсистемы больше абсолютной наибольшей скорости изменения
выходной координаты i-й сепаратной подсистемы больше абсолютной наибольшей скорости изменения  среди выходных координат j-x подсистем, то выходная координата i-й подсистемы движется с опережением и необходимо ее замедлять вычитанием δy′(t). В ином случае воздействие не требуется.
среди выходных координат j-x подсистем, то выходная координата i-й подсистемы движется с опережением и необходимо ее замедлять вычитанием δy′(t). В ином случае воздействие не требуется.
Таким образом, нелинейный корректор 5 формирует логическую корректирующую ошибку
для i-й подсистемы, направленную на координацию и согласование подсистемы, по следующему закону:

где
На вход сумматора 6 поступают вышеописанные логические корректирующий ошибки εi *(t) и
(с нелинейных корректоров 4 и 5 соответственно), а также сигнал ошибки управления εi(t). По результатам суммирования определяется логически скорректированная ошибка управления εi 0(t) i-й подсистемой, которая поступает на вход последующего линейного регулятора, формирующего в соответствии со своим законом управления сигнал управления ui(t).
Пример конкретной реализации способа
В качестве примера конкретной реализации способа рассмотрим многосвязную систему автоматического управления газотурбинным двигателем с предложенным нелинейным корректирующим устройством в каждой подсистеме, структура которой предложена на фиг. 2.
На вход объекта управления 7 поступают управляющие сигналы un1(t), uπT(t), uT3(t) с линейных регуляторов 8-10.
Объект управления 7 включает в себя газотурбинный двигатель с исполнительными механизмами.
Газотурбинный двигатель представим в виде линеаризованного сложного многосвязного динамического объекта с тремя регулируемыми координатами, являющимися функциональными параметрами двигателя - частотой вращения ротора турбокомпрессора (n), степенью расширения газа в турбине (πT) и температурой газа перед турбиной (Т3).
Матричная передаточная функция объекта управления 7, описывающая процесс функционирования исполнительных механизмов и газотурбинного двигателя:

где ТИМ - постоянная времени исполнительного механизма, ТД - постоянная времени газотурбинного двигателя, Kij (i, j = 1, …, 3) - коэффициенты усиления газотурбинного двигателя, τij (i, j = 1, …, 3) - постоянные форсирования газотурбинного двигателя.
Значения перечисленных выше параметров газотурбинного двигателя зависят от параметров полета - высоты полета (Н, км) и скорости полета (V, М), где М - число Маха, и определяются по формулам приведения.
В соответствии с вышеописанной матричной передаточной функцией, определяются выходные координаты с объекта управления: выходная координата n1(t) с подсистемы управления частотой вращения ротора турбокомпрессора, выходная координата πT(t) с подсистемы управления степенью расширения газа в турбине, выходная координата T3(t) с подсистемы управления температурой газа перед турбиной.
На вход линейного регулятора 8 поступает сигнал логически скорректированной ошибки εn1 0(t) с нелинейного корректирующего устройства 11.
Передаточная функция линейного регулятора 8:

где TRn1 - постоянная времени линейного регулятора 8, τRn1 - постоянная форсирования линейного регулятора 8, KRn1 - коэффициент усиления линейного регулятора 8.
В соответствии с вышеописанной передаточной функцией, посредством линейного регулятора 8 формируют сигнал управления un1(t), который поступает на объект управления 7.
На вход линейного регулятора 9 поступает сигнал логически скорректированной ошибки επT 0(t) с нелинейного корректирующего устройства 12.
Передаточная функция линейного регулятора 9:

где ТπT - постоянная времени линейного регулятора 9, τπT - постоянная форсирования линейного регулятора 9, КπT - коэффициент усиления линейного регулятора 9.
В соответствии с вышеописанной передаточной функцией, посредством линейного регулятора 9 формируют сигнал управления uπT(t), который поступает на объект управления 7.
На вход линейного регулятора 10 поступает сигнал логически скорректированной ошибки εT3 0(t) с нелинейного корректирующего устройства 13.
Передаточная функция линейного регулятора 10:
где TT3 - постоянная времени линейного регулятора 10, τT3 - постоянная форсирования линейного регулятора 10, KT3 - коэффициент усиления линейного регулятора 10.
В соответствии с вышеописанной передаточной функцией посредством линейного регулятора 10 формируют сигнал управления uT3(t), который поступает на объект управления 7.
На вход нелинейного корректирующего устройства 11 поступает управляющий сигнал n1 0(t) и выходные координаты с объекта управления 7: выходная координата n1(t) с подсистемы управления частотой вращения ротора турбокомпрессора, выходная координата πT(t) с подсистемы управления степенью расширения газа в турбине, выходная координата Т3(t) с подсистемы управления температурой газа перед турбиной.
Качество функционирования нелинейного корректирующего устройства 11 определяется следующими параметрами нелинейных корректоров: α1, β1, δ1.
Посредством нелинейного корректирующего устройства 11 формируют, в соответствии с вышеописанным способом логического управления, логически скорректированную ошибку εn1 0(t) для подсистемы управления частотой вращения ротора турбокомпрессора, которая поступает на линейный регулятор 8.
На вход нелинейного корректирующего устройства 12 поступает управляющий сигнал πT 0(t) и выходные координаты с объекта управления 7: выходная координата n1(t) с подсистемы управления частотой вращения ротора турбокомпрессора, выходная координата πT(t) с подсистемы управления степенью расширения газа в турбине, выходная координата T3(t) с подсистемы управления температурой газа перед турбиной.
Качество функционирования нелинейного корректирующего устройства 12 определяется следующими параметрами нелинейных корректоров: α2, β2, δ2.
Посредством нелинейного корректирующего устройства 12 формируют, в соответствии с вышеописанным способом логического управления, логически скорректированную ошибку επT 0(t) для управления степенью расширения газа в турбине, которая поступает на линейный регулятор 9.
На вход нелинейного корректирующего устройства 13 поступает управляющий сигнал T3 0(t) и выходные координаты с объекта управления 7: выходная координата n1(t) с подсистемы управления частотой вращения ротора турбокомпрессора, выходная координата πT(t) с подсистемы управления степенью расширения газа в турбине, выходная координата T3(t) с подсистемы управления температурой газа перед турбиной.
Качество функционирования нелинейного корректирующего устройства 13 определяется следующими параметрами нелинейных корректоров: α3, β3, δ3.
Посредством нелинейного корректирующего устройства 13 формируют, в соответствии с вышеописанным способом логического управления, логически скорректированную ошибку εT3 0(t) для управления температурой газа перед турбиной, которая поступает на линейный регулятор 10.
В качестве расчетной точки Р0 функционирования газотурбинного двигателя используется стендовый режим, соответствующий следующим параметрам полета: высота (Н) - 0 км, а скорость (V) - 0 М. В соответствии с формулами приведения, матричная передаточная функция объекта управления 7 в расчетной точке Р0 принимает следующий вид:

Передаточные функции линейных регуляторов 8, 9 и 10, обеспечивающих требуемое качество управления в расчетной точке Р0, имеют следующий вид:

Параметры нелинейных корректирующих устройств 11-13 для каждой подсистемы:
α1=0,5; β1=0,5; δ1=0,5.
α2=0,5; β2=0,5; δ2=0,5.
α3=0,5; β3=0,5; δ3=0,5.
Рассмотрим новый режим P1 функционирования газотурбинного двигателя при следующих параметрах полета: высота (Н) соответствует 10 км, а скорость (V) 1,2 М. В соответствии с формулами приведения матричная передаточная функция объекта управления (7) в точке P1 принимает следующий вид:

На фиг. 3 изображены графики переходных процессов подсистем без нелинейных корректирующих устройств (1-3) на режиме P1 (Н=10 км, М=1,2) при единичном ступенчатом входном воздействии. На фиг. 4 изображены графики переходных процессов подсистем с нелинейными корректирующими устройствами (1-3) на режиме Р1 (Н=10 км, М=1,2) при единичном ступенчатом входном воздействии. Видно, что при изменении параметров газотурбинного двигателя при переходе на новый режим работы нелинейные корректирующие устройства 11-13 значительно улучшают качество управления сложным динамическим объектом: заметно уменьшают перерегулирование и время регулирования во всех подсистемах, а переходные процессы становятся более монотонными.
Итак, заявленное изобретение позволяет повысить быстродействие и уменьшить перерегулирование в переходном режиме, а также увеличить точность функционирования в установившемся режиме во всех подсистемах, что приводит к значительному увеличению качества функционирования сложного многосвязного динамического объекта.
Способ логического управления сложным многосвязным динамическим объектом, по которому посредством нелинейного корректора формируют логический корректирующий сигнал на основе анализа динамики подсистемы по сигналу ошибки ε(t) и ее производной , отличающийся тем, что посредством дополнительного нелинейного корректора формируют сигнал логической корректирующей ошибки , полученный по результатам анализа влияния выбранной максимальной производной y′(t) среди выходных координат j-x подсистем (j=1, …, n, j≠i) на производную выходной координаты i-й подсистемы (i=1, …, n), по закону: где ,δ∈(0; 1],с последующим суммированием полученного сигнала с логическим корректирующим сигналом ε (t), сформированным по закону: где ε (t) - значение ε(t) через промежуток времени α, α∈[0,5; 1,5] сек, β∈(0; 1],и сигналом ошибки управления ε(t) соответствующей i-й подсистемы, тем самым стабилизируют, координируют и согласовывают все подсистемы и управляют сложным многосвязным динамическим объектом.


Способ ионного азотирования титановых сплавов
Способ получения комбинированной формы для отливки сложных заготовок из титановых сплавов
Способ защиты интерметаллидного сплава от высокотемпературного окисления
Измеритель температуры газа газотурбинного двигателя
Способ контроля вибрационного горения в камере сгорания газотурбинного двигателя
Способ определения неуравновешенности станка-качалки скважинной штанговой насосной установки
Тепловой генератор электрической энергии для космического аппарата
Способ азотирования титановых сплавов в тлеющем разряде
Способ низкотемпературного ионного азотирования стальных изделий в магнитном поле
Магнитотепловой генератор для космического аппарата
Способ ионного азотирования титановых сплавов
Способ получения комбинированной формы для отливки сложных заготовок из титановых сплавов
Способ защиты интерметаллидного сплава от высокотемпературного окисления
Измеритель температуры газа газотурбинного двигателя
Способ контроля вибрационного горения в камере сгорания газотурбинного двигателя
Способ определения неуравновешенности станка-качалки скважинной штанговой насосной установки
Тепловой генератор электрической энергии для космического аппарата
Способ азотирования титановых сплавов в тлеющем разряде
Способ низкотемпературного ионного азотирования стальных изделий в магнитном поле
Магнитотепловой генератор для космического аппарата

