Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ
Вид РИД
Изобретение
Изобретение относится к области робототехники, а именно к робототехническим средствам, предназначенным для работы в дистанционном режиме в особо опасных условиях без участия человека.
Известно, что в случае возникновения техногенных аварий и пожаров, сопряженных с поражением больших площадей в зонах повышенного риска, обусловленных наличием радиации, химической и биологической зараженности местности, взрывоопасностью, для подавления пожара, проведения пожарно-спасательных и аварийно-восстановительных работ необходимо максимально сократить непосредственное нахождение людей в опасных зонах, исключив при этом возможность их поражения. Для выполнения этих работ наиболее эффективно применять технологии проведения аварийно-спасательных работ с использованием робототехнических комплексов различного назначения.
Существенные трудности для операторов при управлении роботом вне зоны прямой видимости представляют ситуации серьезного ухудшения качества или полной потери видеосигнала, принимаемого с расположенных на роботе телекамер, а также ситуация частичной или полной потери управления и прекращение получения телеметрической информации вследствие прерывания канала связи. Это обусловлено в первую очередь физическими ограничениями на беспроводную передачу сигналов управления и телевидения с применением передатчиков, усилителей и антенн, работающих в разрешенном диапазоне частот. Причинами этих помех могут являться как естественные преграды, например железобетонные конструкции, складки местности, растительность, так и искусственные, например сильные индустриальные радиопомехи.
Для решения этих задач в части автономности движения необходимо иметь подсистемы технического зрения, навигации, формирования модели внешней среды, планирования и отработки автономного целенаправленного движения. С точки зрения аппаратного расширения в системах управления должны быть предусмотрены элементы коммутации для внедрения таких составляющих, как системы сбора информации на основе датчиков, системы технического зрения на основе телекамер и тепловизоров, а также измерительных приборов и устройств, предназначенных для сбора информации об опасных факторах внешней среды (таких как химическое и радиоактивное загрязнение).
С точки зрения программного расширения возможностей работы удобным является применение в системе отлаженных протоколов обмена информацией как на борту робота, так и между роботом и пультом управления.
Известно устройство управления адаптивным мобильным роботом по патенту РФ №2187832, кл. G05D 1/02, G06F 19/00, опубликованному 20.08.2002.
Данное устройство предназначено для управления движением адаптивного робота, обладающего свойствами искусственного интеллекта.
Устройство управления адаптивным роботом содержит блок сенсорных датчиков, выходы которого соединены с входами блока формирования модели внешней среды, чьи выходы подключены к первым входам вычислительного блока, вторые входы которого связаны со вторыми выходами блока исполнительных устройств, а выходы подключены к входам m-стабильного триггера. В качестве вычислительного блока используется нейросеть, содержащая матрицу k·m ключевых элементов. Кроме того, имеется схема сравнения, блок задания движения, блок задания констант, блок регулирования, блок определения координат робота, блок датчиков внутренней информации.
Недостатками данного устройства являются его плохая адаптация к сложной и изменяющейся окружающей среде и к сложному и изменяющемуся внутреннему состоянию робота и узкая область применения.
Наиболее близким к предлагаемому техническому решению является мобильный робот и способ корректировки его курса по патенту РФ №2210492, кл. B25J 5/00, B25J 9/00, опубликованному 27.03.2003, принятый за прототип.
Данное техническое решение содержит устройство для перемещения мобильного робота по помещению, устройство для обнаружения наличия препятствия, управляющую часть, соединенную с устройством для перемещения мобильного робота и устройством для обнаружения препятствия и управляющую ими, устройство для определения текущего местоположения мобильного робота, соединенное с управляющей частью, и источник питания. Устройство для определения текущего местоположения мобильного робота содержит первую обзорную телекамеру для создания изображения потолка помещения и распознавания базового знака на потолке и первую видеоплату, обрабатывающую изображение, полученное с первой обзорной телекамеры, и передающую данные в управляющую часть. Источник питания соединен с управляющей частью и аккумулирует электроэнергию и питает устройство для перемещения мобильного робота, устройство для обнаружения препятствия, устройство для определения местоположения и управляющую часть. Устройство для обнаружения препятствия содержит линейный лазер для излучения линейного светового пучка по направлению к препятствию, вторую обзорную телекамеру для распознавания отраженного от препятствия линейного светового пучка и вторую видеоплату для обработки видеоданных, полученных второй телекамерой. Изобретение позволяет определять местоположение робота и корректировать его направление при обнаружении препятствия.
Недостатками данного устройства являются: плохая адаптация к изменяющимся условиям окружающей среды, ограниченность числа решаемых задач из-за узконаправленной комплектации и отсутствие внешнего наблюдения.
Задачей, на решение которой направлено предлагаемое техническое решение, является разработка системы автоматического возврата робототехнического комплекса в исходную позицию в экстремальной ситуации при потере связи по каналу управления.
Для этого в способе автоматического управления наземным робототехническим комплексом, включающим в себя радиообмен между пультом управления и робототехническим комплексом, обеспечение ввода и обработку входной информации, поступающей от бортовых датчиков, вычисление текущей ориентации и местоположения робототехнического комплекса, при потере радиосвязи между пультом управления и робототехническим комплексом осуществляют его автоматический возврат в точку старта или в зону уверенного радиообмена по ранее пройденной траектории с корректировкой этой траектории в обход обнаруженных препятствий путем реализации на борту робототехнического комплекса базовых алгоритмов движения в заранее неизвестной обстановке по дальнометрическому изображению внешней среды с помощью навигационно-вычислительного блока.
Технический результат заключается в повышении эффективности управления робототехническим средством и приспособляемости к сложной и изменяющейся окружающей среде. Такой способ является аварийным способом управления робототехническим средством и позволяет сохранить робототехническое средство в экстремальных условиях при нарушении штатных режимов управления.
В целях повышения эффективности работы операторов в дистанционном режиме управления и обеспечения автономного и/или автоматического управления наземными робототехническими комплексами в особо сложных условиях работы в штатные системы управления робототехнических комплексов встраивают комплект устройств интеллектуального управления.
При помощи специального измерительного оборудования на базе сканирующего лазерного дальномера, ультразвуковых датчиков и датчиков теплового потока комплект формирует на экране пульта управления упрощенную модель окружающей обстановки вокруг мобильного робота. Также комплект обеспечивает моделирование положения самого робота, его ориентации в пространстве и положение его подвижных частей. Это позволяет оператору намного более полно оценивать рабочую ситуацию в режиме реального времени.
Комплект обладает возможностью управления роботом в автоматическом режиме, а именно позволяет вернуть робота к оператору при наличии серьезных помех или полном пропадании сигналов радиоуправления. При ручном управлении роботом, позволяет избегать попадания робота в зоны с опасно высокой температурой, дает возможность управления роботом с помощью макрокоманд выведения манипулятора в рабочее или транспортное положения.
В состав комплекта входят: устройство сопряжения со штатной системой управления, навигационно-вычислительный блок, комплект датчиков и комплект расширения пульта дистанционного управления.
Все составные части комплекта выполнены в виде конструктивно законченных изделий (модулей) с местами крепления на несущие части корпуса робота и оснащены необходимыми разъемами для внешнего подключения.
Навигационно-вычислительный блок предназначен для непосредственного управления движением мобильного робота по заданной траектории.
Аппаратно-программное обеспечение навигационно-вычислительного блока выполняет задачи сбора информации, подготовленной другими устройствами, ее анализа и выработки управляющих команд на штатные устройства робототехнического комплекса. Блок работает независимо от канала дистанционного управления и в автоматическом режиме следит за состоянием окружающей среды. Блок выполняет задачи построения карты местности, формирования траектории движения при автономном возврате робота и посылки команд движения или остановки на исполнительные механизмы шасси робота. В том числе блок препятствует управлению подвижными механизмами робототехнического комплекса в случае их непосредственной близости к температурно-опасным зонам. Память навигационно-вычислительного блока позволяет запомнить маршрут до 50 метров пройденного пути.
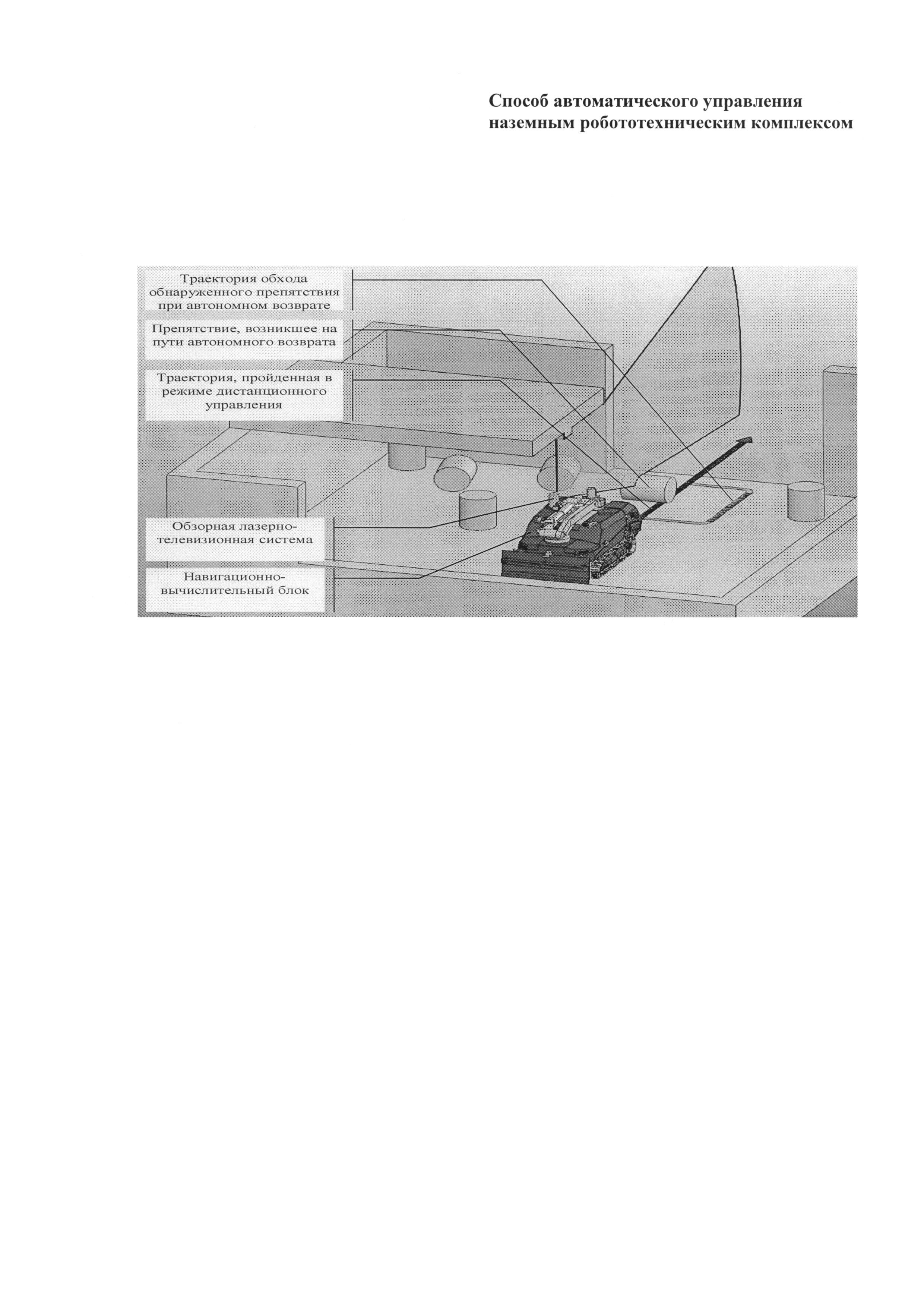
На чертеже изображена схема возврата робототехнического комплекса в точку старта или в зону уверенного радиообмена.
Реализация заявляемого способа автоматического управления наземным робототехническим комплексом заключается в следующем.
Для получения детального дальнометрического изображения внешней среды во фронтальной части робота размещают лазерный дальномер, что позволяет решить задачу определения геометрических параметров заранее неопределенного пространства вокруг робота при прямолинейном движении. В навигационно-вычислительном блоке происходит обработка значений, поступающих от дальномера. Далее с использованием полученной информации решается задача построения карты местности и формирования траектории движения.
Кадр изображения формируется в виде массива дальностей, полученных лазерным дальномером. Сканирование лазерного луча производится по углу азимута и возвышения. Этот массив данных поступает в навигационно-вычислительный блок, который дополняет его данными о пройденном пути, полученными с обоих датчиков пройденного пути, о курсе движения, поступившем от гироскопа, о крене и дифференте робота. Кроме того, в кадр изображения заносится информация о глобальных координатах положения робота в пространстве, полученных спутниковой навигационной системой. Окончательно сформированный кадр передается в бортовой компьютер по быстродействующему интерфейсу Ethernet для дальнейшей его обработки. Обработав введенный кадр изображения внешней среды, бортовой компьютер строит траекторию движения внутри этого кадра и выводит ее в навигационно-вычислительный блок для дальнейшей ее реализации.
Уже на первом этапе обработки с целью получения для каждой отдельной точки обзора текстурированный фрагмент виртуального трехмерного изображения окружающей среды предлагается комплексировать информацию от видеокамеры и дальномера. В дальнейшем в процессе движения такие фрагменты собираются в объединенную трехмерную модель больших областей внешней среды (например, одного этажа или всего здания). В предлагаемом решении лазерный сенсор с зоной обзора в виде плоского сектора 180° (270°) и широкоугольная видеокамера с одной ПЗС-линейкой с зоной обзора в виде плоского сектора 90° собирают в единый модуль для обеспечения максимально общей зоны обзора. Данный модуль закрепляется на вращающемся сканаторе, позволяющем получать круговую зону обзора в телесном угле 360°×90°, и устанавливается на одну из площадок крепления телекамеры.
Комплексирование дальнометрического и телевизионного изображений выполняется в два этапа.
На первом этапе для каждого элементарного дальнометрического измерения (дальнометрического пикселя) находится соответствие в пространстве видеокадра и для соседних измерений определяется геометрическое и цветовое расстояния, с учетом которых на втором этапе строются аппроксимирующие элементарные грани каркасной модели. Соответствие пикселей видеокадра и измерений дальномера находится путем преобразования координат. На втором этапе по дальнометрическому изображению строится трехмерная каркасная модель и на нее "натягивается" соответствующий телевизионный кадр. При этом каркасная модель формируется в виде набора отдельных треугольников, а телевизионный кадр с исправленной геометрией загружается в текстуру. Для построений может быть использован графический пакет Direct3D. В этой модели могут быть отмечены температурно-опасные зоны, выявленные с помощью температурных датчиков и навигационной подсистемы.
При этом эффективность управления существенно возрастает вследствие появления дополнительной возможности получения различных геометрических сечений рабочей зоны и ее осмотра с различных позиций наблюдения (в том числе и с позиций, в которых сенсоры не находились или находится не могут).
Комплексирование дальнометрического и телевизионного изображения, снятых с одной позиции, позволяет получить только фрагмент рабочей зоны.
Для формирования полной модели рабочей зоны (например, целого помещения, одного этажа или всего здания) комплексированные изображения получают для разных позиций (например, в процессе движения), а затем объединяют в обобщенную модель.
Объединение отдельных комплексированных изображений возможно только при решении навигационной задачи - определении приращения координат (линейных и угловых) между позициями съема изображений.
Реальная ситуация во внешней среде по каким-либо причинам может меняться с течением времени.
В процессе движения робота эти несоответствия могут быть обнаружены и использованы для уточнения модели внешней среды. Обнаруженные бортовой системой технического зрения препятствия и свободные от препятствий участки заносятся в модель путем преобразования из подвижной системы координат, связанной с роботом, в неподвижную систему координат, связанную с внешней средой.
Используя информацию о построенной модели и о местонахождении в ней робота, бортовое программное обеспечение формирует целенаправленную безопасную траекторию движения. Отработка найденной траектории сводится к выполнению определенной последовательности ограниченного набора команд, сводящихся к удержанию на заданном курсе и поддержанию заданного радиуса поворота.
Предлагаемое техническое решение позволит решить задачу трехмерной визуализации робототехнического комплекса в окружающей обстановке с наложением опасных факторов аварийной ситуации и задачу автономных движений по скорректированным при необходимости траекториям.
Способ автоматического управления наземным робототехническим комплексом, включающий радиообмен между пультом управления и робототехническим комплексом, обеспечение ввода и обработку входной информации, поступающей от бортовых датчиков, вычисление текущей ориентации и местоположения робототехнического комплекса, отличающийся тем, что при потере радиосвязи между пультом управления и робототехническим комплексом осуществляют его автоматический возврат в точку старта или в зону уверенного радиообмена по ранее пройденной траектории с корректировкой этой траектории в обход обнаруженных препятствий путем реализации на борту робототехнического комплекса базовых алгоритмов движения в заранее неизвестной обстановке по дальнометрическому изображению внешней среды с помощью навигационно-вычислительного блока.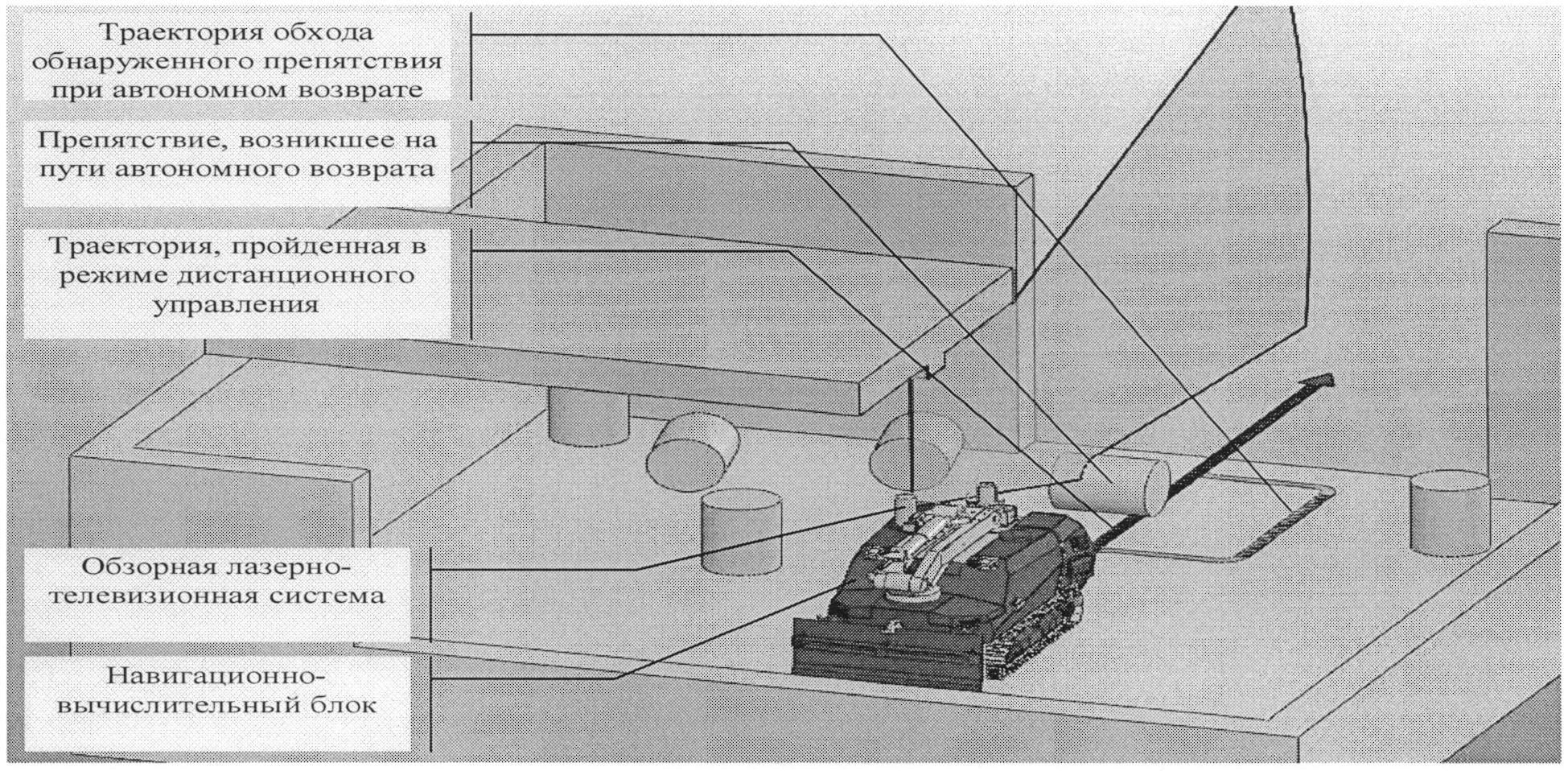
Способ комбинированного пожаротушения, устройство для его реализации
Способ локального тушения торфяных пожаров и быстротвердеющая пена для локализации очагов горения торфяных пожаров
Способ обнаружения границы локального подземного торфяного пожара и способ доставки на поверхность торфяника портативного георадара и приёма данных зондирования в режиме реального времени
Способ ингибирования самовоспламеняющихся алюминийорганических соединений и состав для его реализации
Способ и комплекс средств эвакуации населения, материальных и культурных ценностей в режиме чрезвычайной ситуации
Датчик измерения механических деформаций
Способ тушения локальных подземных очагов горения торфяных пожаров
Способ регистрации времени срабатывания спринклерного оросителя (варианты) и устройство для его реализации
Устройство для определения огнегасящей концентрации при подаче мелкодисперсных составов в восходящую струю
Способ оценки пожарной опасности частиц металлов и устройство для его осуществления
Способ тушения локальных очагов горения торфяных пожаров
Способ испытаний на пожаростойкость неметаллических и гибких металлических труб (варианты) и устройство для его реализации (варианты)
Способ тушения локальных подземных торфяных пожаров и устройство для его реализации
Устройство автоматической локальной пожарной защиты и способ разрушения оболочки капсулы с нанопорошком
Способ комбинированного пожаротушения, устройство для его реализации
Способ локального тушения торфяных пожаров и быстротвердеющая пена для локализации очагов горения торфяных пожаров
Способ тушения пожара с использованием группировки робототехнических средств

