Результат интеллектуальной деятельности: АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ
Вид РИД
Изобретение
Изобретение относится к области авиации, в частности к аппаратам на воздушной подушке, преимущественно к самолетам с шасси на воздушной подушке, оснащенным системой стабилизации, в том числе системой демпфирования колебаний по высоте, и системой автоматического управления по углам тангажа и крена.
Из уровня техники известны аппараты на воздушной подушке (далее АВП), оснащенные системой стабилизации. Так в патенте РФ №2256570, МПК B60V 1/16, B60V 1/12, B60V 3/02, дата публикации 20.05.2005 [1], представлен АВП, содержащий корпус, ограждение воздушной подушки, снабженное воздуховодом, расположенным вдоль периметра АВП и разделенным, по меньшей мере, на две изолированные полости, пневматически связанные с ограждением, силовую установку, содержащую, по меньшей мере, один двигатель, кинематически связанный не менее чем с одним нагнетателем, соединенным посредством воздуховода и дроссельной заслонки с соответствующей изолированной полостью, по меньшей мере, один канал, соединяющий камеру воздушной подушки с атмосферой посредством управляемого клапана, систему управления, содержащую, по меньшей мере, один датчик вертикальной перегрузки и, по меньшей мере, один датчик угловой перегрузки, при этом указанные датчики связаны с вычислителем, вырабатывающим по сигналам от указанных датчиков сигнал на привод открытия соответствующей дроссельной заслонки и управляемого клапана.
В описании изобретения [1], принятого в качестве наиболее близкого аналога, система управления выполнена без обратной связи, что является недостатком изобретения [1], поскольку приводит к увеличению действующих на аппарат на воздушной подушке перегрузок при движении по взволнованной водной и неровной грунтовой поверхностям.
Решаемой в изобретении задачей является уменьшение действующих на АВП перегрузок при движении по взволнованной водной и неровной грунтовой поверхностям.
Технический результат заключается в обеспечении автоматического управления угловыми колебаниями и демпфирования вертикальных колебаний АВП.
Сущность изобретения состоит в следующем.
Аппарат на воздушной подушке, как и в наиболее близком аналоге, содержит корпус, ограждение воздушной подушки, снабженное воздуховодом, расположенным вдоль периметра корпуса аппарата на воздушной подушке и разделенным, по меньшей мере, на две изолированные полости, пневматически связанные с ограждением, силовую установку, содержащую, по меньшей мере, один двигатель, кинематически связанный не менее чем с одним нагнетателем, соединенным посредством воздуховода и дроссельной заслонки с соответствующей изолированной полостью, по меньшей мере, один канал, соединяющий камеру воздушной подушки с атмосферой посредством управляемого клапана, систему управления, содержащую, по меньшей мере, по одному датчику вертикальной перегрузки и угловой перегрузки, при этом указанные датчики связаны с вычислителем, вырабатывающим по сигналам от указанных датчиков сигнал на исполнительный механизм привода открытия соответствующих дроссельной заслонки и управляемого клапана, но в отличие от наиболее близкого аналога корпус, ограждение воздушной подушки, снабженное воздуховодом, расположенным вдоль периметра корпуса аппарата на воздушной подушке и разделенным, по меньшей мере, на две изолированные полости, пневматически связанные с ограждением, силовую установку, содержащую, по меньшей мере, один двигатель, кинематически связанный не менее чем с одним нагнетателем, соединенным посредством воздуховода и дроссельной заслонки с соответствующей изолированной полостью, по меньшей мере, один канал, соединяющий камеру воздушной подушки с атмосферой посредством управляемого клапана, систему управления, содержащую, по меньшей мере, по одному датчику вертикальной перегрузки и угловой перегрузки, при этом указанные датчики связаны с вычислителем, вырабатывающим по сигналам от указанных датчиков сигнал на исполнительный механизм привода открытия соответствующих дроссельной заслонки и управляемого клапана.
Аппарат на воздушной подушке характеризуется тем, что исполнительный механизм однокаскадного привода типа «сопло-заслонка» содержит, по меньшей мере, один пневмодвигатель, соединенный с соответствующей дроссельной заслонкой.
При этом следящий привод снабжен компрессором, подающим воздух под давлением в канал питания привода.
Аппарат на воздушной подушке характеризуется тем, что исполнительный механизм однокаскадного привода типа «сопло-заслонка» содержит, по меньшей мере, один гидродвигатель, соединенный с соответствующей дроссельной заслонкой.
Аппарат на воздушной подушке характеризуется тем, что система управления дополнительно содержит датчики давления воздуха в отдельных полостях воздушной подушки, связанные с логико-вычислительной подсистемой, вырабатывающей по данным от этих датчиков сигнал на отклонение дроссельных заслонок.
Аппарат на воздушной подушке характеризуется тем, что за воздушным движителем установлены аэродинамические вертикальные и/или горизонтальные рули, оснащенные электропневматическим или электрогидравлическим следящими приводами для их поворота, сигналы на отклонение которых связаны с системой управления транспортным средством.
Аппарат на воздушной подушке характеризуется тем, что двигатель соединен посредством трансмиссии, по меньшей мере, с одним воздушным движителем для создания тяги и с одним или более нагнетателями для создания воздушной подушки.
Аппарат на воздушной подушке характеризуется тем, что размещенный вдоль периметра корпуса воздуховод разделен мембранами на четыре полости.
Изобретение поясняется чертежами.
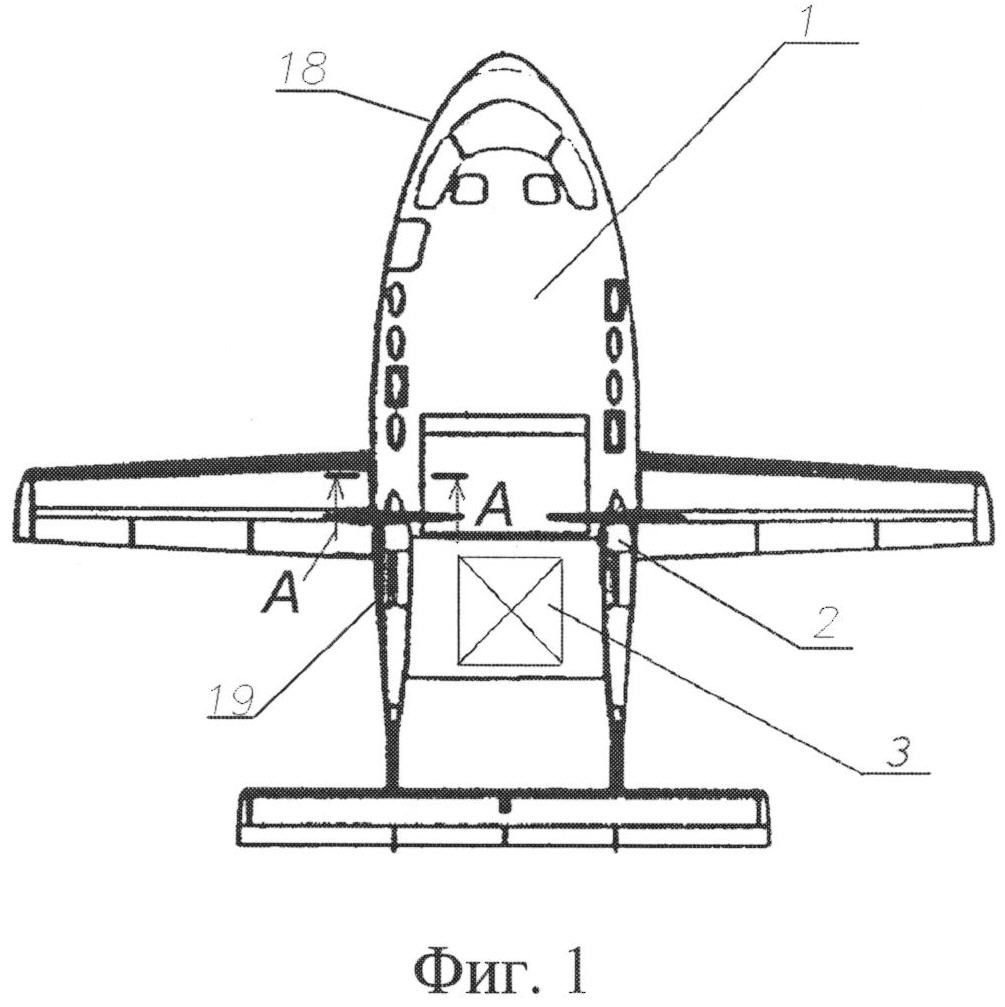
На фиг. 1 представлен АВП при виде в плане.
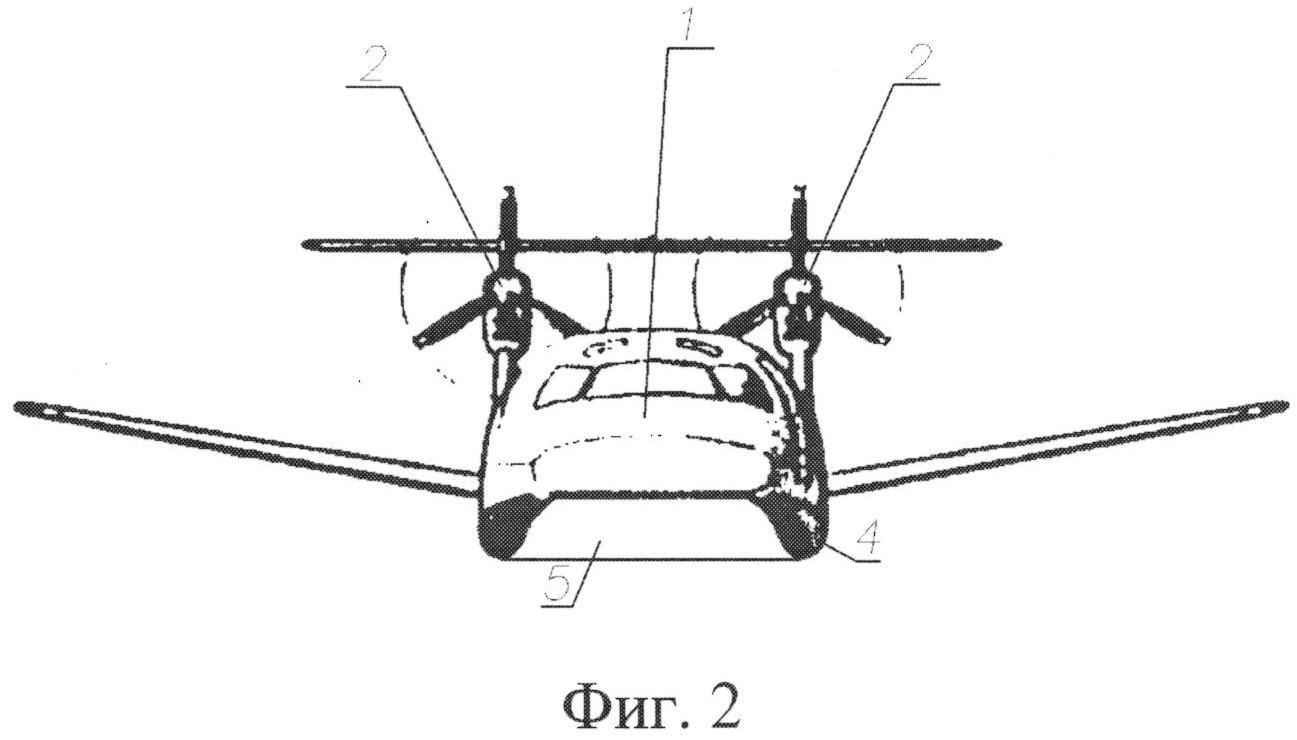
На фиг. 2 показано АВП при виде спереди.
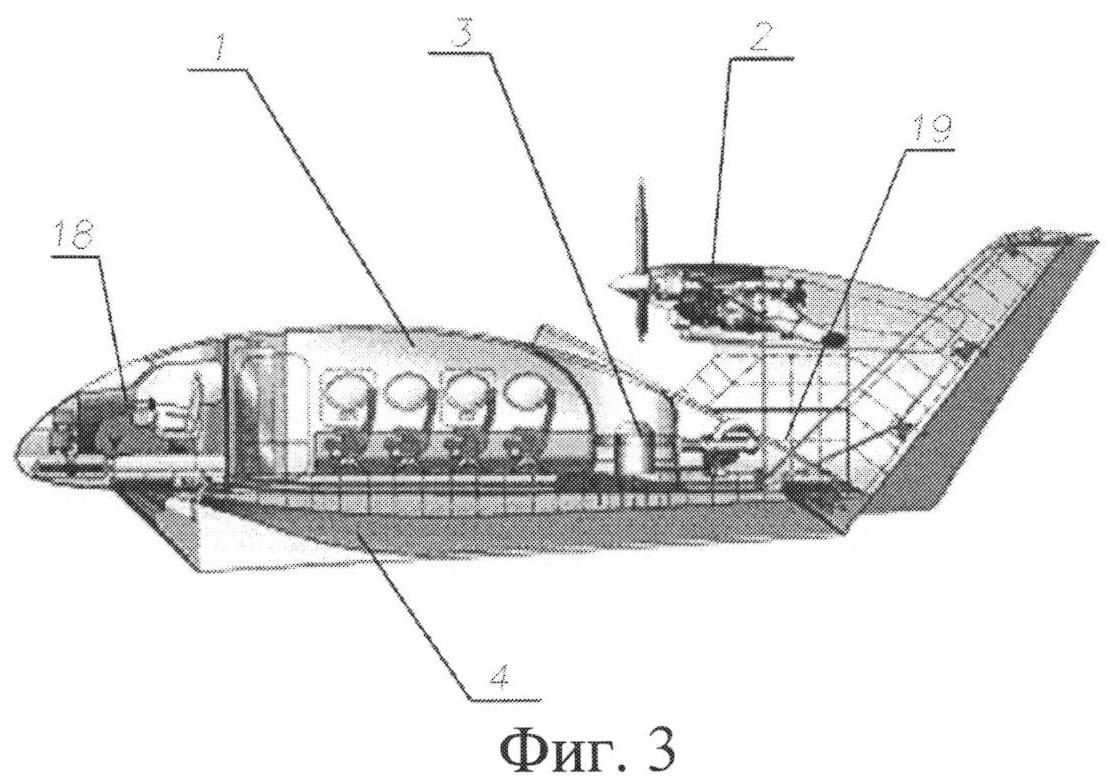
На фиг. 3 показан разрез АВП в продольной плоскости.
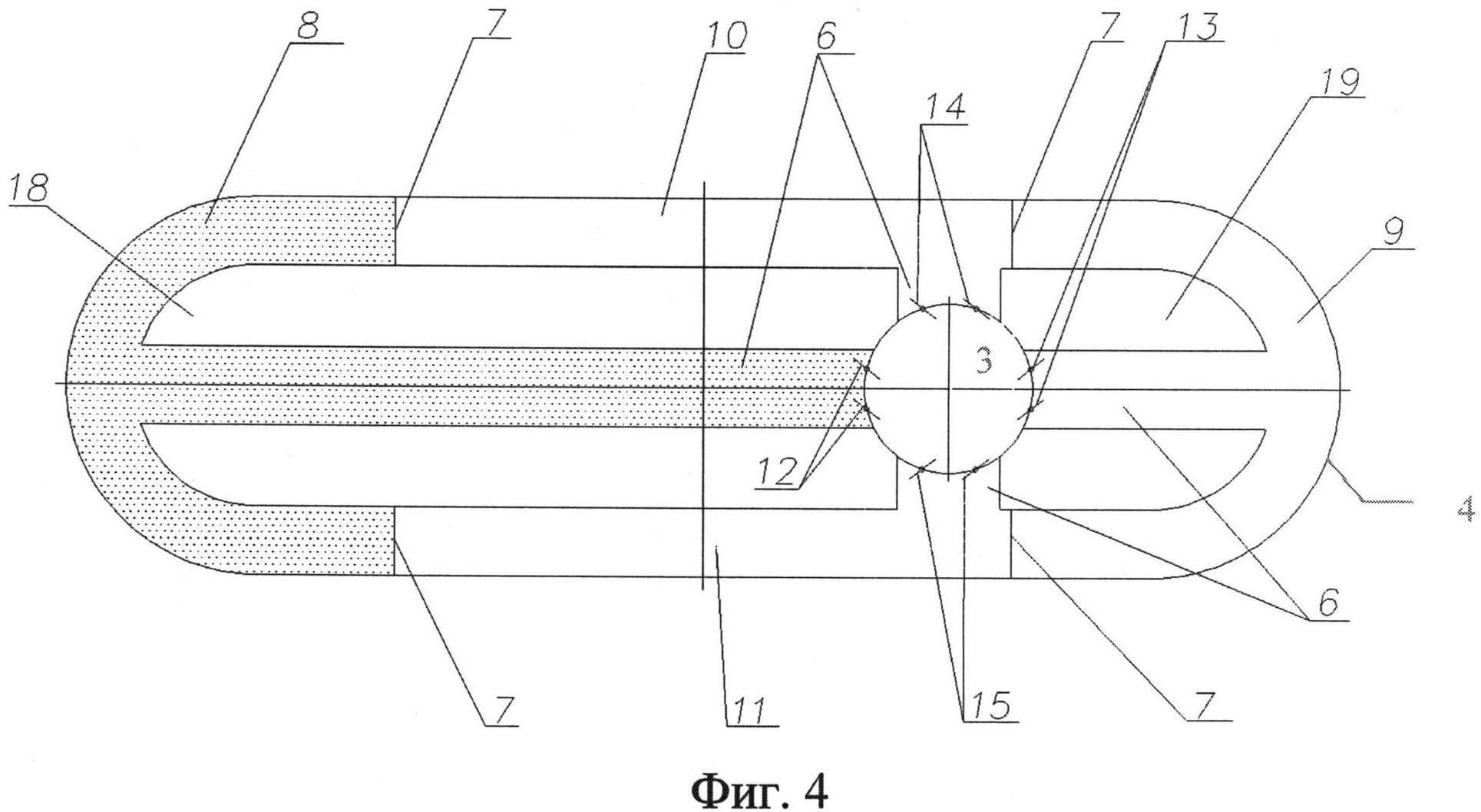
На фиг. 4 приведена схема разделения ограждения АВП на изолированные полости.
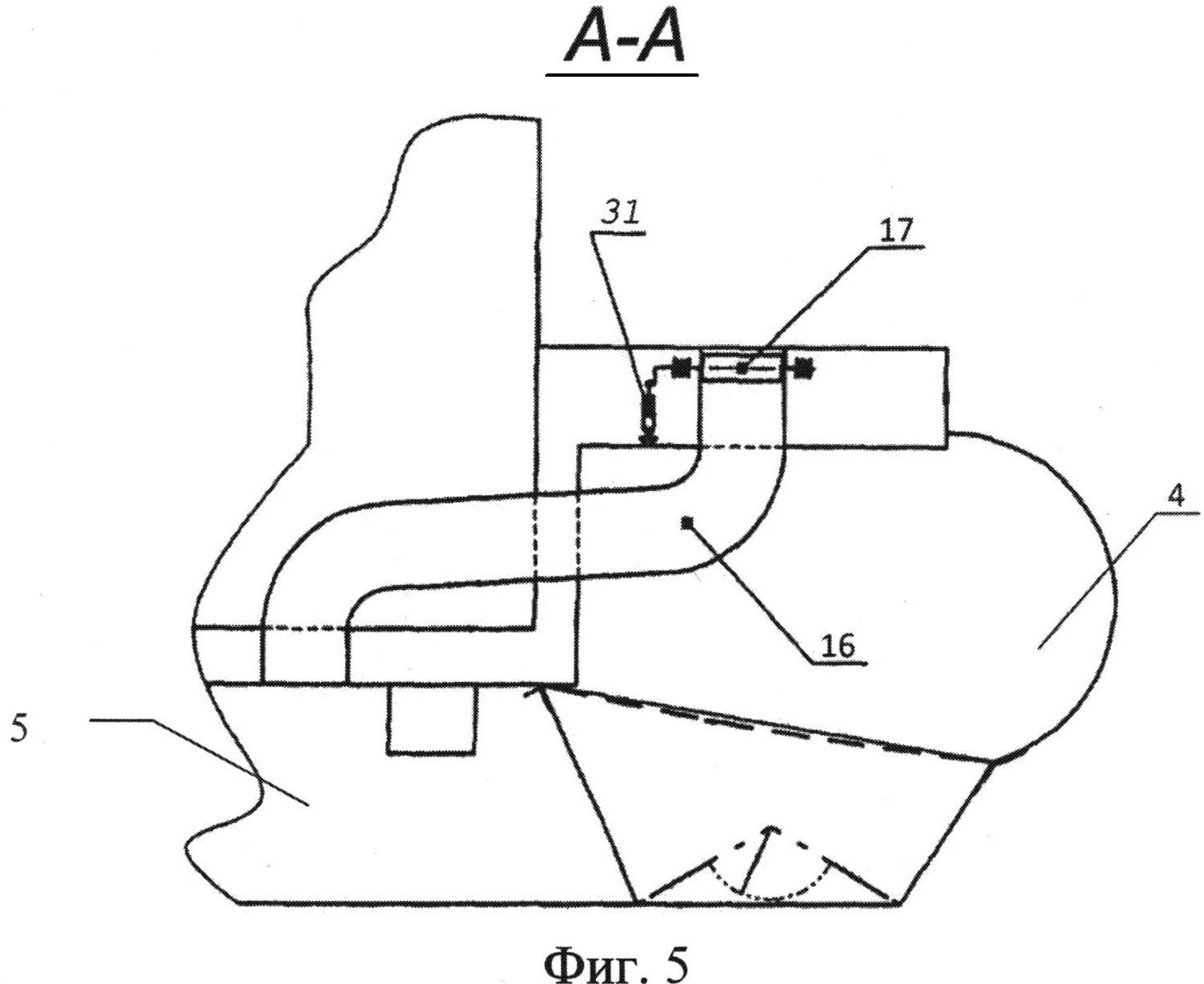
На фиг. 5 показан разрез А-А на фиг. 1.
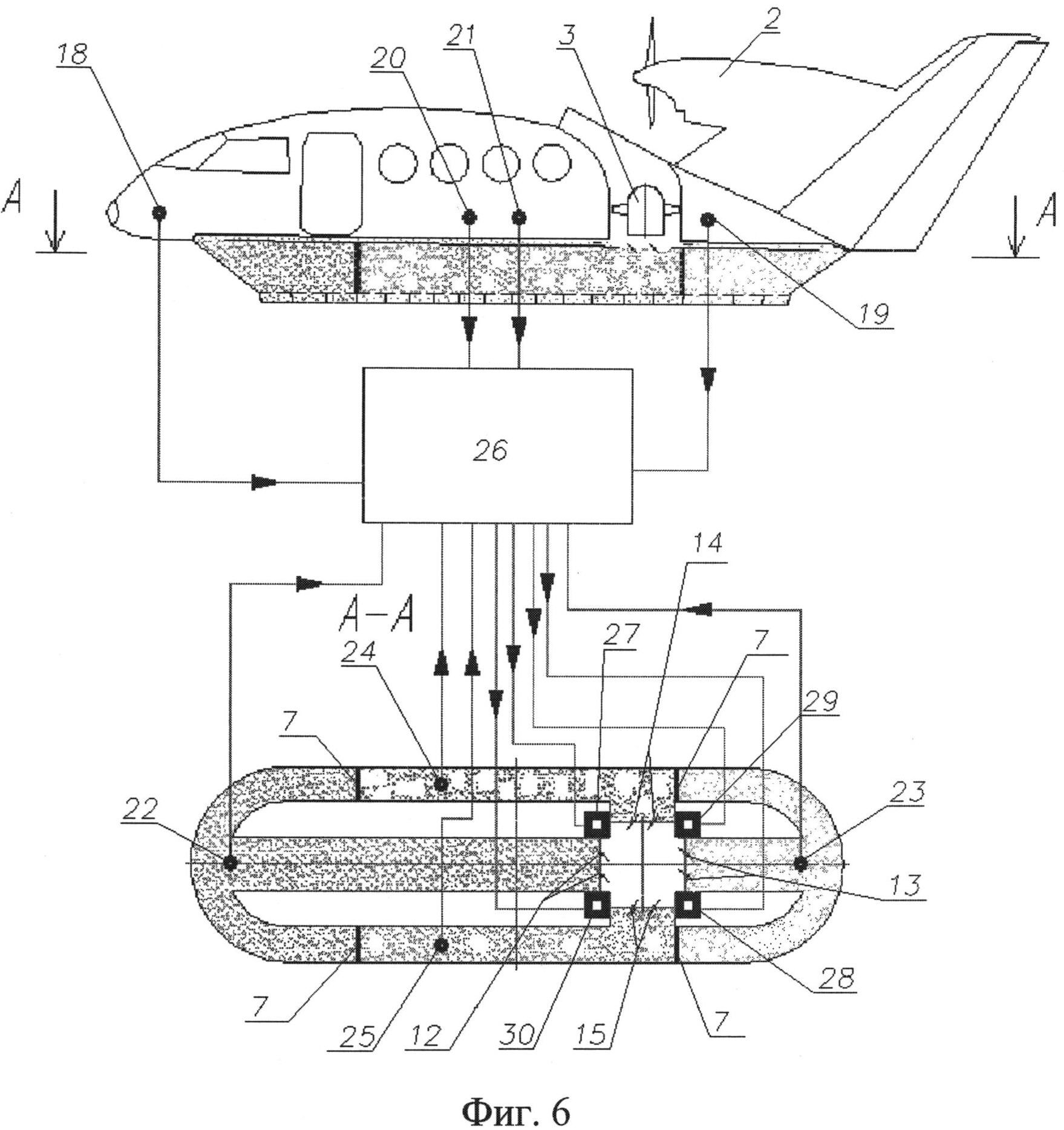
На фиг. 6 приведена схема управления дроссельными заслонками.
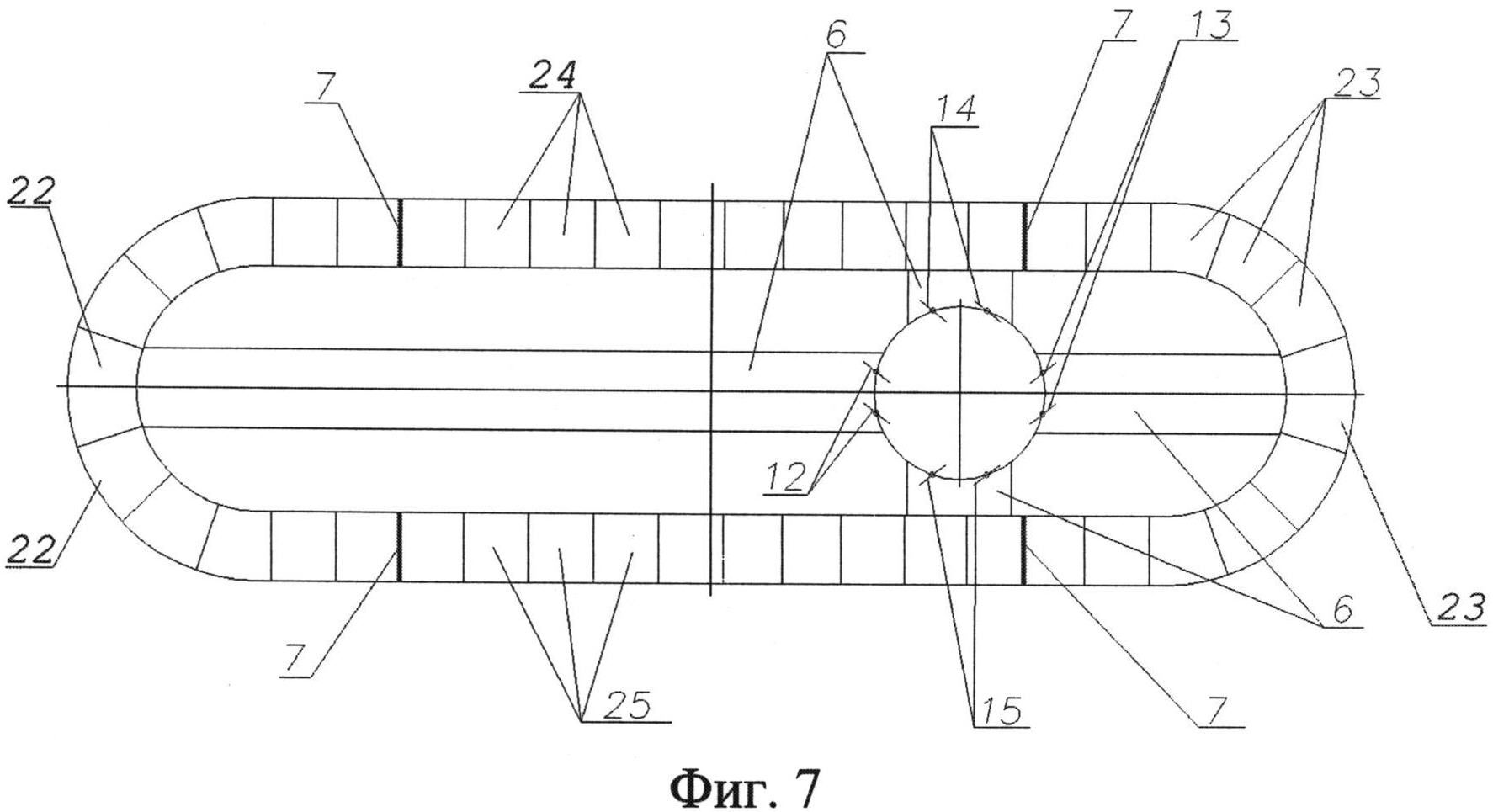
На фиг. 7 приведена схема расположения датчиков давления воздуха в элементах ограждения АВП.
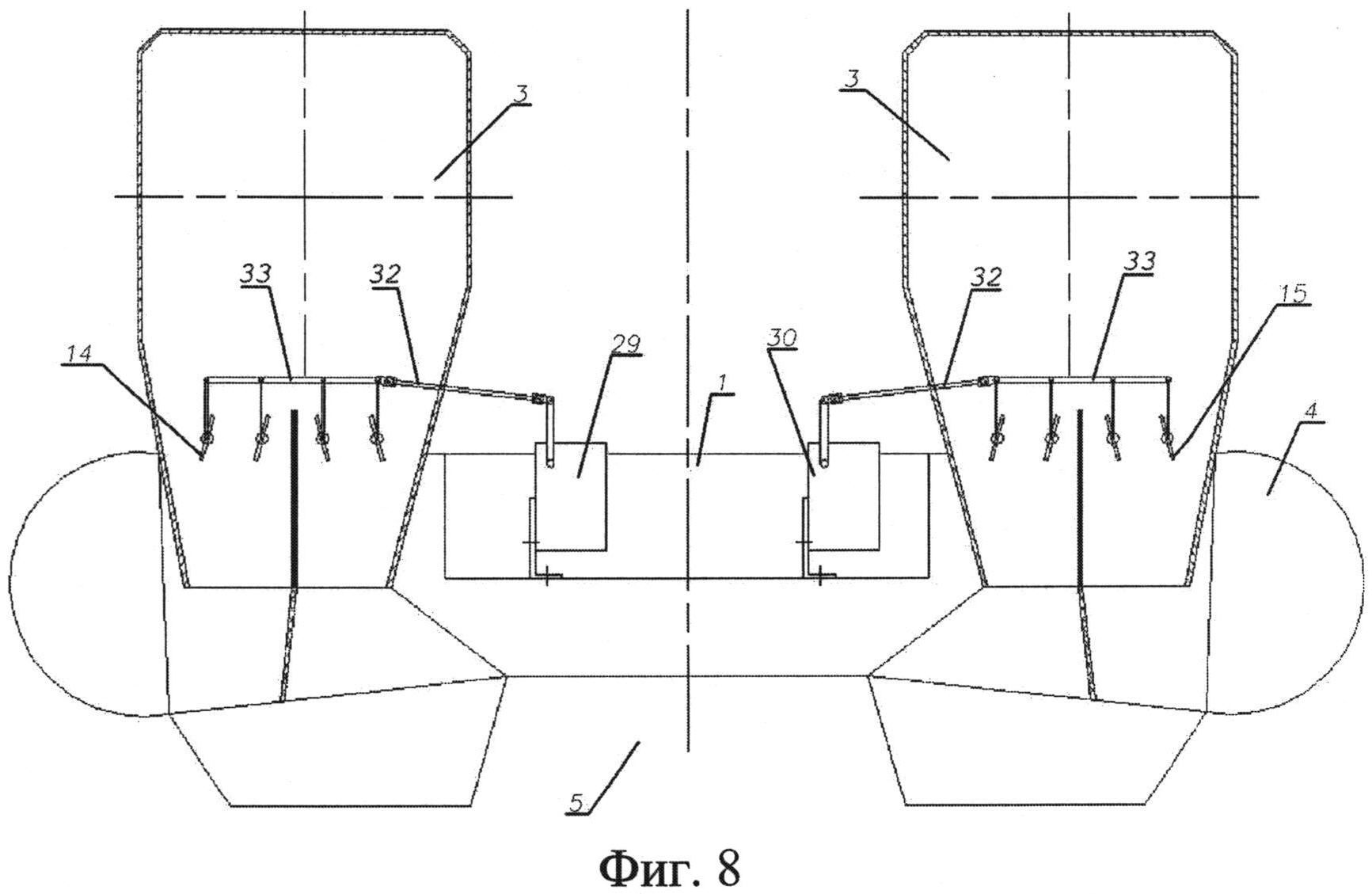
На фиг. 8 приведена схема управления с помощью АВП по углам крена и тангажа.
На фиг. 9 приведена принципиальная схема поворота дроссельных заслонок с помощью электропневматического следящего привода.
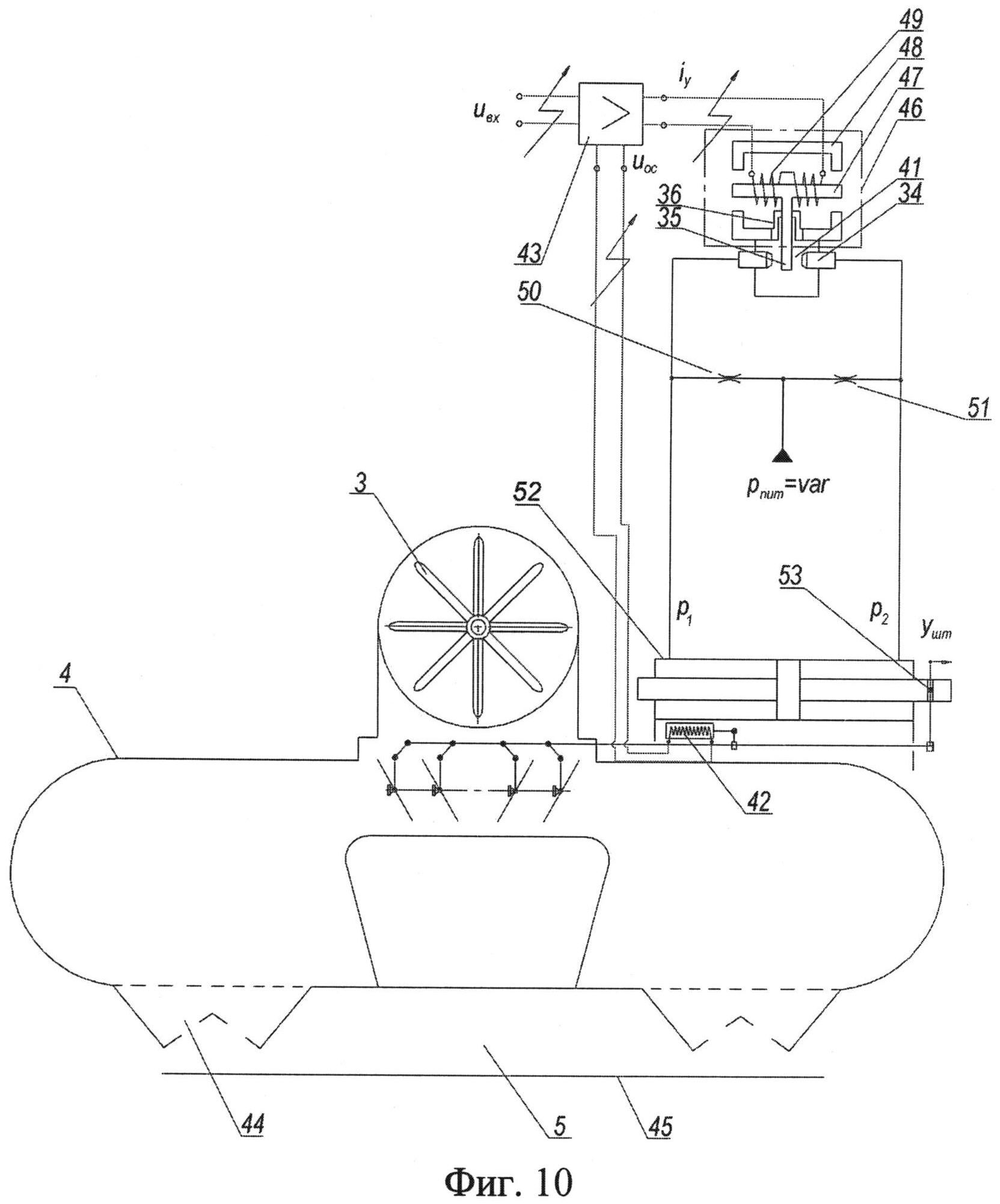
На фиг. 10 приведена принципиальная схема поворота дроссельных заслонок с помощью электрогидравлического следящего привода.
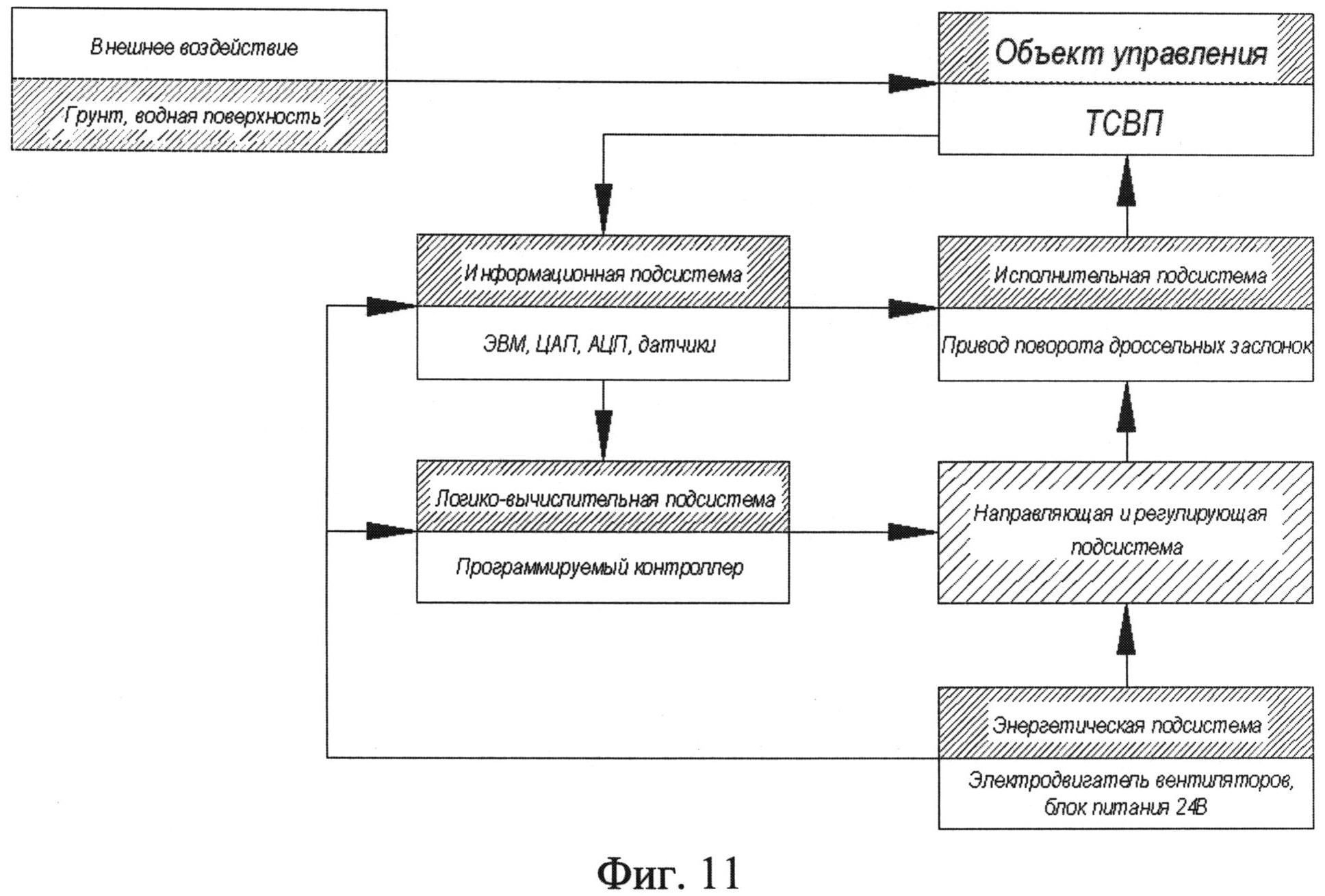
На фиг. 11 показана блок-схема адаптивной системы демпфирования АВП по углам крена и тангажа.
Раскрытие изобретения.
АВП содержит корпус 1, силовую установку, включающую, по меньшей мере, один двигатель 2, кинематически связанный, например, посредством трансмиссии, не менее чем с одним нагнетателем, выполненным, например, в виде осевого вентилятора 3, ограждение 4 камеры 5 воздушной подушки и систему управления (фиг. 1, 2, 3).
По периметру корпуса 1, например вдоль ограждения 4, расположены воздуховоды 6, разделенные, например, мембранами 7, по меньшей мере, на две, а в предпочтительном варианте - на четыре изолированные полости, соответственно: носовую 8, кормовую 9, правого 10 и левого 11 бортов (фиг. 4, 5, 6, 7). Каждая из изолированных полостей 8, 9, 10, 11 пневматически связана с ограждением 4 и с нагнетателем, например осевым вентилятором 3, посредством дроссельных заслонок соответственно 12, 13, 14 и 15. Камера 5 воздушной подушки может соединяться с атмосферой каналом 16 с размещенным в нем управляемым клапаном 17 (фиг. 5).
Система управления содержит, по меньшей мере, по одному датчику вертикальной перегрузки и угловой перегрузки, в предпочтительном варианте выполнения - датчики перегрузки в носовой 18 и кормовой 19 частях АВП, датчики угла тангажа 20 и угла крена 21. В каждой из изолированных полостей 8, 9, 10, 11 установлены датчики давления 22, 23, 24, 25 соответственно в носовой, кормовой, правого борта, левого борта изолированных полостях (фиг. 6). Все датчики 18-25 связаны с вычислителем 26, вырабатывающим по сигналам от датчиков 18-25 сигнал на привод 27, 28, 29, 30 открытия соответственно дроссельных заслонок 12, 13, 14, 15 (фиг. 6, 7), а также привод 31 управляемого клапана 17 (фиг. 5). Система управления также может содержать контур управления работой двигателей 2 силовой установки и нагнетателей, например осевого вентилятора 3. При этом система управления выполнена с обратной связью по угловому положению и по скорости.
В предпочтительном варианте выполнения камера 5 воздушной подушки мембранами 7 разделена на четыре изолированные полости 8, 9, 10, 11 (фиг. 4), каждая из которых оснащена собственным нагнетателем, например осевым вентилятором 3 (фиг. 8). Обратная связь системы управления по угловому положению содержит датчик 20, 21 углового положения по тангажу и крену (фиг. 6), кинематическая связь привода с соответствующей дроссельной заслонкой 12, 13, 14, 15 содержит шарико-винтовую передачу 32 и реечный механизм 33 (фиг. 8).
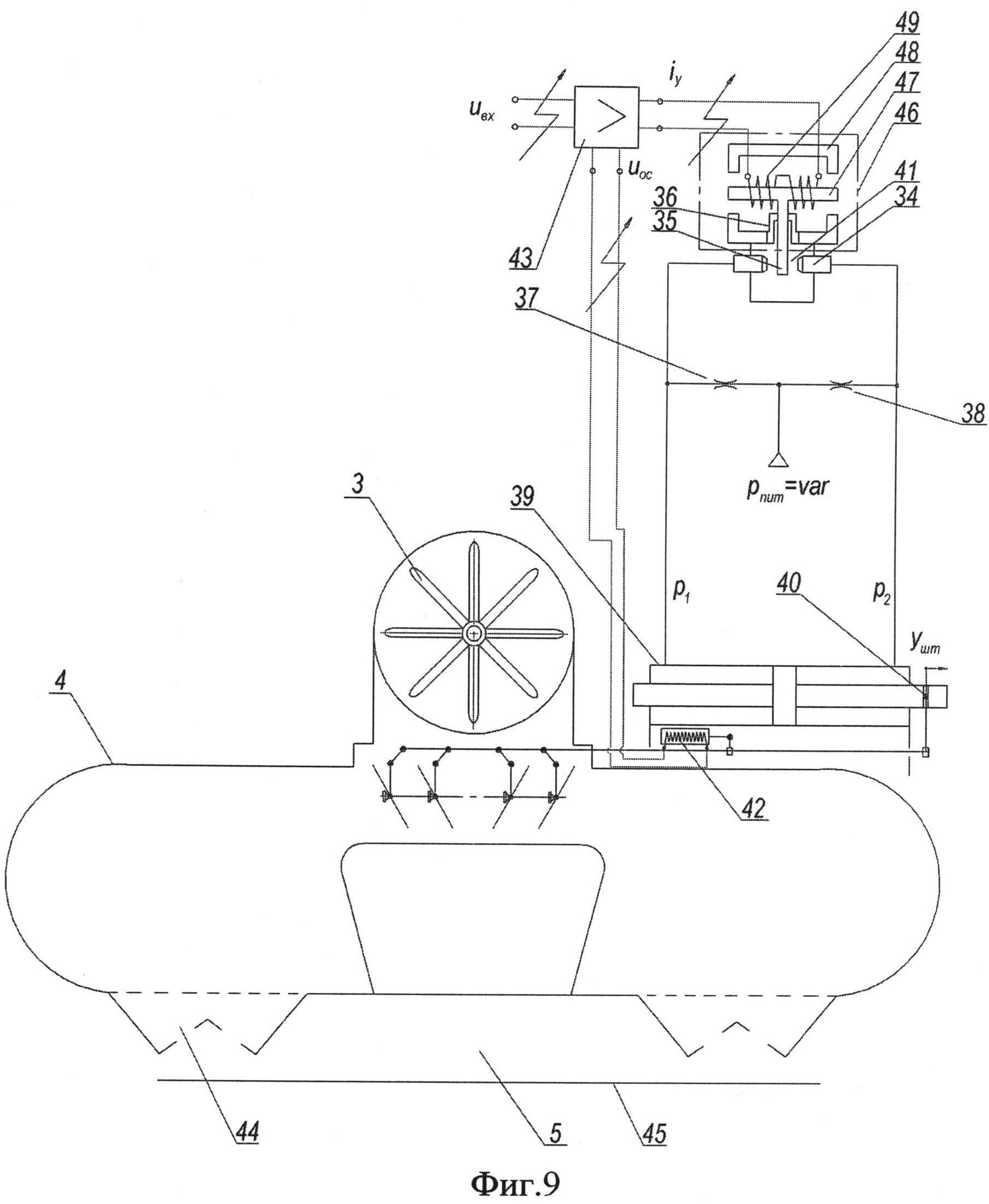
В качестве привода 27-30 дроссельных заслонок 11-14 при взлетной массе АВП 2-5 тонн целесообразно использовать электропневматический однокаскадный следящий привод типа «сопло-заслонка» (фиг. 9), а при взлетной массе АВП более 5 тонн - электрогидравлический однокаскадный следящий привод типа «сопло-заслонка» (фиг. 10).
Принципиальная схема системы регулирования давления в воздушной подушке с помощью электропневматического однокаскадного привода типа «сопло-заслонка» (ЭПСП) содержит следующие элементы (фиг. 9): 34 - сопло; 35 - заслонка; 36 - упругая (разделительная) трубка; 37, 38 - дроссели пневматического моста; 39 - исполнительный пневмодвигатель (пневмоцилиндр); 40 - шток; 41 - устройство «сопло-заслонка»; 42 - датчик обратной связи; 43 - усилитель электрических сигналов; 44 - элемент воздушной подушки; 45 - опорная поверхность; 46 - электромеханический преобразователь; 47 - магнит постоянного тока; 48 - якорь; 49 - обмотка якоря. При этом сжатый воздух поступает в следящий привод от компрессора (не показан).
Принципиальная схема регулирования давления в воздушной подушке с помощью электрогидравлического односкаскадного привода типа «сопло-заслонка» (ЭГСП) (фиг. 10) отличается от электропневматической ЭПСП (фиг. 9) тем, что вместо дросселей 37, 38 пневматического моста и исполнительного пневмодвигателя 39 со штоком 40 установлены дроссели 50, 51 гидравлического моста, исполнительный гидродвигатель 52 с поршнем 53 (фиг. 10).
Система управления АВП по углам крена и тангажа, как показано на фиг. 6, 8, 11, содержит:
- исполнительную подсистему (пневмодвигатели 39 или гидродвигатели 52 приводов 27, 28, 29, 30 поворота дроссельных заслонок 12, 13, 14, 15);
- регулирующую подсистему (система дроссельных заслонок 12, 13, 14, 15);
- энергетическую подсистему (двигатели 2, нагнетатели, например осевые вентиляторы 3, источники питания);
- логико-вычислительную подсистему (вычислитель 26, выполненный, например, в виде программируемого контроллера);
- информационная подсистема (датчики 18, 19, 20, 21, 22, 23, 24, 25).
АВП работает следующим образом.
АВП, как объект управления, двигаясь по неровной опорной поверхности, передает в информационную подсистему массив данных об объекте. Информационная подсистема собирает все данные с датчиков 18-25 о движении АВП, данные об энергетической подсистеме, передает суммирующую информацию в вычислитель 26 логико-вычислительной подсистемы, которая за счет введенных алгоритмов и программ вырабатывает управляющий сигнал на операционный усилитель.
В усилителе электрических сигналов 43 сравниваются управляющие сигналы и сигналы от датчиков обратной связи 42 положения соответствующих исполнительных элементов приводов 27-30 - пневмодвигателей 39 и гидродвигателей 52. По сигналу рассогласования вырабатывается сигнал на соответствующие пневмодвигатели 39 и гидродвигатели 52 приводов 27-30, которые устанавливают необходимое положение дроссельных заслонок 12-15. Дроссельные заслонки 12-15 изменяют перераспределение массовых расходов воздуха, подаваемого в изолированные полости 8-11 ограждения 4 камеры 5 воздушной подушки, тем самым управляя АВП по углам крена и тангажа (фиг. 6, 9-11).
Система управления АВП по крену и тангажу с электропневматическим или электрогидравлическим следящим приводом управления дроссельными заслонками 12-15 и управляемого клапана 17 работает следующим образом.
На операционный усилитель электрических сигналов 43 от логико-вычислительной подсистемы приходит сигнал Uвx. Он сравнивается с сигналом от датчика обратной связи 42 положения штока 40 пневмоцилиндра пневмодвигателя 39 (фиг. 9) или штока 53 гидроцилиндра гидродвигателя 52 (фиг. 10) Uос (угла поворота дроссельных заслонок 12-15). Разница этих сигналов поступает в электромеханический преобразователь 46 на обмотки якоря 49. Между постоянными магнитом 47 и якорем 48 возникает электромагнитное поле, поворачивающее якорь 48 на определенный угол. К якорю 48 с помощью упругого элемента 36 прикреплена заслонка 35. Поворачиваясь, например, по часовой стрелке, она перекрывает левое сопло 34 и открывает отверстие правого сопла 34. Таким образом, расход в левой части электропневматического (или электрогидравлического) усилителя через дроссель 37 и левое сопло 34 уменьшится (произойдет увеличение давления воздуха в левой полости пневмоцилиндра пневмодвигателя 39 или гидроцилиндра гидродвигателя 52), а в правой части электропневматического (или электрогидравлического) усилителя расход увеличится через дроссель постоянного сечения 38 и правое сопло 34 (давление воздуха в правой полости пневмоцилиндра пневмодвигателя 39 или гидроцилиндра гидродвигателя 52 уменьшится). Возникнет перепад давления между полостями пневмоцилиндра 39 или гидроцилиндра гидродвигателя 52, его шток переместится на такое расстояние, когда отношение Uвх и Uос будет равняться нулю. При этом левые дроссельные заслонки 15 откроют канал 6 для поступления воздуха в полость 11 левого борта, а две правые дроссельные заслонки 14 закроют канал 6 для поступления воздуха в полость 10 правого борта. С помощью алгоритмов логико-вычислительной подсистемы достигается плавное управление АВП по углам крена и тангажа.
Для обеспечения необходимой информацией логико-вычислительной системой АВП для выработки сигналов управления на исполнительные органы целесообразно, кроме измерения скорости движения АВП, продольных и поперечных перегрузок, измерять датчиками 22-25 (фиг. 7) также избыточные давления в полостях 8-11 шасси на воздушной подушке. С помощью этих датчиков 22-25 (фиг. 7) управление АВП будет происходить своевременно и более плавно, система управления будет иметь большие запасы устойчивости. Датчики 22-25 давления установлены в каждый элемент 44 ограждения 4 камеры 5 воздушной подушки, а также в каждый их четырех каналов 6, по которым воздух поступает от вентилятора в полости камеры 5 (ресивера) воздушной подушки.
Представленное описание АВП раскрыто в достаточной мере для разработки конструкции и реализации изобретения на специализированных предприятиях. Изобретение соответствует условию патентоспособности «промышленная применимость».
ПЕРЕЧЕНЬ ПОЗИЦИЙ И ОБОЗНАЧЕНИЙ
1 - корпус;
2 - двигатель;
3 - осевой вентилятор;
4 - ограждение камеры воздушной подушки;
5 - камера воздушной подушки;
6 - воздуховод;
7 - мембрана;
8 - носовая изолированная полость;
9 - кормовая изолированная полость;
10 - правого борта изолированная полость;
11 - левого борта изолированная полость;
12 - дроссельная заслонка, соединяющая воздуховод 6 с носовой изолированной полостью 8;
13 - дроссельная заслонка, соединяющая воздуховод 6 с кормовой изолированной полостью 9;
14 - дроссельная заслонка, соединяющая воздуховод 6 с правого борта изолированной полостью 10;
15 - дроссельная заслонка, соединяющая воздуховод 6 с левого борта изолированной полостью 11;
16 - канал;
17 - управляемый клапан;
18 - датчик перегрузки в носовой части АВП;
19 - датчик перегрузки в кормовой части АВП;
20 - датчик угла тангажа;
21 - датчик угла крена;
22 - датчики давления в носовой изолированной полости 8;
23 - датчики давления в кормовой изолированной полости 9;
24 - датчики давления в правого борта изолированной полости 10;
25 - датчики давления в левого борта изолированной полости 11;
26 - вычислитель;
27 - привод дросселирующей заслонки 12;
28 - привод дросселирующей заслонки 13;
29 - привод дросселирующей заслонки 14;
30 - привод дросселирующей заслонки 15;
31 - электродвигатель управляемого клапана 17;
32 - шарико-винтовая передача;
33 - реечный механизм;
34 - сопло;
35 - заслонка;
36 - упругая (разделительная) трубка;
37 - дроссель пневматического моста;
38 - дроссель пневматического моста;
39 - исполнительный пневмодвигатель;
40 - шток;
41 - устройство «сопло-заслонка»;
42 - датчик обратной связи;
43 - усилитель электрических сигналов;
44 - элемент воздушной подушки;
45 - опорная поверхность;
46 - электромеханический преобразователь;
47 - магнит постоянного тока;
48 - якорь;
49 - обмотка якоря;
50 - дроссель гидравлического моста;
51 - дроссель гидравлического моста;
52 - гидродвигатель;
53 - шток гидродвигателя;
Uвх - входной сигнал на операционный усилитель электрических сигналов 43;
Uос - сигнал от датчика обратной связи 42 на операционный усилитель электрических сигналов 43.
Болометрический приемник излучения терагерцового диапазона
Способ изготовления заготовок трубных из титановых псевдо α-сплавов 5в и 37
Измерительный преобразователь на несущей частоте
Установка для газодинамических испытаний
Способ определения координат и параметров движения источников радиоизлучений на основе анализа их взаимного расположения
Способ изготовления композиционного борсодержащего порошка-наполнителя для энергетических материалов
Комплексная система планирования применения и подготовки полетных заданий группе летательных аппаратов
Электрод марки эа-2594 для сварки высокопрочных сталей перлитного и аустенитно-ферритного класса
Проволока марки св-08х16н5м3аб для сварки высокопрочных сталей
Проволока марки св-08х21н10м2г4афб для сварки высокопрочных сталей
Способ лечения язв прямой кишки у пациентов с болезнью крона путем аутотрансплантации гемопоэтических стволовых клеток

