Результат интеллектуальной деятельности: ПАРАЛЛЕЛЬНОЕ ИЛИ ВЫПОЛНЯЕМОЕ ПОСЛЕДОВАТЕЛЬНО В ОНЛАЙН- И ОФФЛАЙН- РЕЖИМАХ ФОРМИРОВАНИЕ РЕКОНСТРУКЦИЙ ДЛЯ ТРЕХМЕРНОГО ОБМЕРА ПОМЕЩЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к измерительному приспособлению и измерительной системе для автоматического трехмерного обмера помещения. Кроме того, изобретение относится к соответствующему способу, к элементу компьютерной программы, обеспечивающему осуществление способа при выполнении этого элемента в процессоре, и к машиночитаемому носителю информации, на котором записан вышеупомянутый элемент программы.
Уровень техники
Трехмерный обмер помещений представляет большой интерес, например, для специалистов по ремонту и обустройству и архитекторов, которым требуется как можно быстрее оценить фактическое состояние помещений с целью, например, планирования предстоящих работ, таких как монтаж встроенных кухонных гарнитуров и окон, а также малярных работ.
При проведении обмера пользователь выполняет, например, с помощью какого-либо прибора одиночные снимки помещения, которые могут затем использоваться для построения трехмерной реконструкции этого помещения. Однако качество этой реконструкции зависит от геометрической ориентации одиночных снимков в пространстве. Для получения оптимальной ориентации одиночных снимков от пользователя требуется знание специальных алгоритмов.
Раскрытие изобретения
Исходя из вышесказанного задачей настоящего изобретения является создание усовершенствованного устройства и способа, обеспечивающих возможность формирования (построения) высококачественной трехмерной реконструкции помещения.
Решение этой задачи достигается в изобретении, объекты которого охарактеризованы в независимых пунктах формулы изобретения. Предпочтительные варианты осуществления изобретения описаны в зависимых пунктах формулы.
Ниже приведено подробное описание отличительных признаков, особенностей и возможных преимуществ устройства, предлагаемого в настоящем изобретении в различных вариантах осуществления.
Первым объектом настоящего изобретения является измерительное приспособление для автоматического трехмерного обмера помещения. Измерительное приспособление содержит съемочный аппарат, выполненный с возможностью получения видеоизображений низкого разрешения и снимков высокого разрешения. Получение снимков высокого разрешения осуществляется автоматически на основе трехмерной реконструкции помещения, формируемой по видеоизображениям в режиме реального времени, в геометрически подходящих точках помещения.
Автоматическое получение снимков высокого разрешения может осуществляться без участия пользователя. Например, автоматическое получение такого снимка запускается управляющим или вычислительным устройством, связанным с измерительным приспособлением напрямую или по беспроводному каналу. Автоматическое получение такого снимка, или автоматическая съемка, может включать срабатывание датчика изображений и, в случае необходимости, сохранение данных в памяти. В альтернативном варианте автоматическая съемка может означать вызов определенных данных из запоминающего устройства.
Съемочный аппарат может содержать, например, датчик изображений с высоким разрешением, обеспечивающий получение снимков высокого разрешения. Для осуществления видеосъемки с низким разрешением можно, например, уменьшить масштаб снимков высокого разрешения. Для этого съемочный аппарат может содержать датчик изображений, обеспечивающий быстрое переключение между текущим изображением низкого разрешения, получаемым при прямой передаче видеокамеры, и одиночными снимками высокого разрешения. Одиночные снимки высокого разрешения можно сохранять в постоянной или оперативной памяти в уменьшенном масштабе. Снимки уменьшенного масштаба можно использовать для выполнения трехмерной реконструкции в режиме реального времени. Одиночные снимки высокого разрешения, находящиеся в запоминающем устройстве или промежуточном запоминающем устройстве, можно снова вызвать для одновременного или последующего формирования высококачественной реконструкции.
В альтернативном варианте съемочный аппарат может содержать первый и второй датчики изображений. Первый датчик изображений может представлять собой камеру высокого разрешения, а второй датчик изображений - камеру с возможностью получения видеоизображений.
Получаемые видеоизображения имеют более низкое разрешение по сравнению со снимками высокого разрешения. Низкое разрешение может относиться, например, к объемным деталям. Следствием низкого разрешения являются меньшие объемы данных видеоизображений по сравнению со снимками высокого разрешения. Из-за меньших объемов данных обработка видеоизображений может осуществляться в режиме прямой передачи, то есть в режиме реального времени. Эта обработка может осуществляться в онлайн-режиме, то есть без промежуточного сохранения данных, а результат обработки - трехмерная реконструкция в режиме реального времени, - может передаваться пользователю в форме непосредственной обратной связи. Низкое разрешение можно понимать в пространственном смысле. Временное же разрешение может быть при этом высоким: можно, например, осуществлять видеосъемку в режиме реального времени с высокой частотой вывода видеоизображений.
По реконструкции помещения, формируемой в режиме реального времени, можно определить в этом помещении точки, геометрически подходящие для получения снимков высокого разрешения. Геометрически подходящие точки могут быть определены с помощью ориентиров, имеющихся на видеоизображениях низкого разрешения. Снимки высокого разрешения имеют высокое качество и большие, чем у видеоизображений, объемы данных. Эти снимки могут представлять собой одиночные кадры, выполненные в геометрически подходящих точках помещения.
Согласно одному примеру осуществления настоящего изобретения измерительное приспособление также содержит устройство вывода, выполненное с возможностью вывода формируемой в режиме реального времени трехмерной реконструкции. Тем самым можно реализовать обратную связь с пользователем и непрерывное руководство перемещением пользователя в режиме реального времени в направлении точек помещения, геометрически подходящих для получения снимков высокого разрешения. Устройство вывода может быть выполнено, например, в виде дисплея.
Вторым объектом настоящего изобретения является измерительная система для автоматического трехмерного обмера помещения. Эта измерительная система содержит описанное выше измерительное приспособление и процессор.
Процессор может представлять собой, например, ноутбук, карманный персональный компьютер (КПК) или планшет. Далее, процессор может быть связан с измерительным приспособлением беспроводным каналом, например, посредством электромагнитных сигналов, в частности с применением коммуникационных технологий Bluetooth или WLAN (беспроводная локальная сеть). В альтернативном варианте процессор может быть непосредственно встроен в измерительное приспособление.
Видеоизображения низкого разрешения, получаемые с помощью камеры, передаются в онлайн-режиме непосредственно в процессор (вычислительное устройство). На основе этих видеоизображений процессор формирует в режиме реального времени трехмерную реконструкцию помещения. Кроме того, в процессоре предусмотрена возможность определения - на основе этой трехмерной реконструкции в режиме реального времени, - точек помещения, подходящих для получения снимков высокого разрешения. Это определение подходящих точек основано на трехмерном алгоритме и тоже осуществляется в режиме реального времени параллельно видеосъемке и параллельно трехмерной реконструкции. Процессор также предназначен для запуска автоматической съемки с целью получения снимков высокого разрешения посредством камеры.
Согласно одному примеру осуществления настоящего изобретения, в процессоре также предусмотрена возможность выполнения второй трехмерной реконструкции на основании полученных снимков высокого разрешения по окончании съемки последних. Для этого снимки высокого разрешения могут быть по окончании съемки сохранены в памяти. Тем самым вторая трехмерная реконструкция может выполняться в оффлайн-режиме, то есть не в режиме реального времени. Это может дать благоприятный эффект, поскольку обработка снимков высокого разрешения, включающих большие объемы данных, может потребовать больших затрат времени. В альтернативном варианте вторая трехмерная реконструкция может выполняться параллельно реконструкции в режиме реального времени (онлайн-режиме). Вторая трехмерная реконструкция является более точной, то есть, например, более детализированной и приближенной к реальности, чем реконструкция в режиме реального времени.
Третьим объектом настоящего изобретения является способ автоматического трехмерного обмера помещения. Этот способ подходит для использования применительно к вышеупомянутой измерительной системе.
Четвертым объектом настоящего изобретения является элемент компьютерной программы, обеспечивающий осуществление вышеупомянутого способа посредством процессора.
Пятым объектом настоящего изобретения является машиночитаемый носитель информации, на который записан вышеупомянутый элемент компьютерной программы.
Предлагаемые в настоящем изобретении измерительное приспособление, измерительная система и способ обладают следующими преимуществами. Они обеспечивают возможность построения очень точной, высококачественной трехмерной реконструкции обмеряемого помещения. Эта реконструкция выполняется автоматическим образом, благодаря чему повышаются точность и надежность, поскольку теперь не нужно всецело полагаться на знания и навыки пользователя. Кроме того, обеспечивается возможность выполнения руководства перемещением пользователя в режиме реального времени. Тем самым достигается возможность пользования системой даже в отсутствие специальных знаний о построении трехмерной реконструкции. Далее, построение реконструкции в режиме реального времени на основе видеоизображений сопряжено с меньшими затратами времени на сбор и обработку информации.
Благодаря параллельному протеканию нескольких процессов, а именно процессов получения видеоизображений, формирования трехмерной реконструкции в режиме реального времени и получения снимков высокого разрешения, обеспечивается возможность автоматической интеграции более поздних снимков в ранее выполненную высококачественную трехмерную реконструкцию и уточнения первоначально определенной геометрии помещения. Кроме того, в существующую трехмерную модель помещения могут быть дополнительно и также автоматически введены данные, полученные от других датчиков, например датчиков длинноволнового инфракрасного диапазона, радаров, терагерцовых, рентгеновских датчиков и детекторов для обнаружения объектов в стенах.
Наряду с вышесказанным, в предлагаемом изобретении обеспечивается возможность интуитивно понятной визуализации в процессе съемки. Кроме того, полученные результаты поступают к пользователю в режиме реального времени и в пространственной привязке к помещению.
Краткое описание чертежей
Прочие отличительные признаки и преимущества настоящего изобретения будут ясны специалистам в данной области из приведенного ниже описания примеров его осуществления, которые, однако, не следует интерпретировать в ограничительном смысле. На приложенных чертежах показано:
на фиг.1 - схематическое изображение (вид спереди и сзади) измерительной системы для автоматического трехмерного обмера помещения согласно одному из примеров осуществления настоящего изобретения,
на фиг.2 - схематическое изображение (вид сверху) обмеряемого помещения с положениями при съемке и результатами реконструкции согласно одному из примеров осуществления настоящего изобретения,
на фиг.3 - схематическое изображение процесса реконструкции в режиме реального времени и руководства перемещением пользователя согласно одному из примеров осуществления настоящего изобретения.
Все чертежи представляют собой лишь схематические изображения предлагаемых в настоящем изобретении устройств или их компонентов, а также соответствующих этапов реализации предлагаемого способа. В частности, показанные на чертежах размеры и пропорции компонентов не подразумевают их точного воспроизведения в масштабе. Соответствующие элементы, показанные на различных чертежах, имеют одни и те же ссылочные обозначения.
Осуществление изобретения
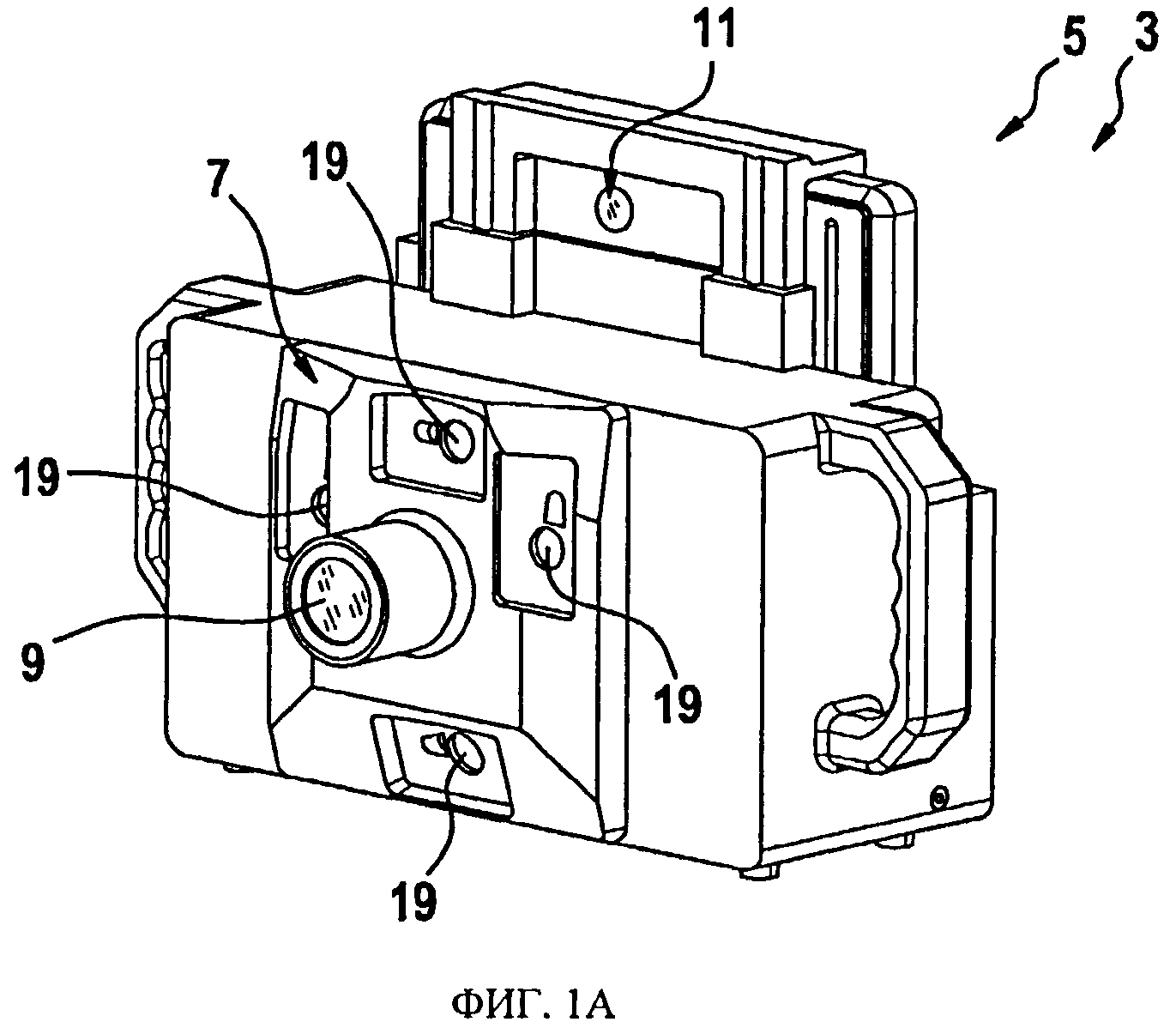
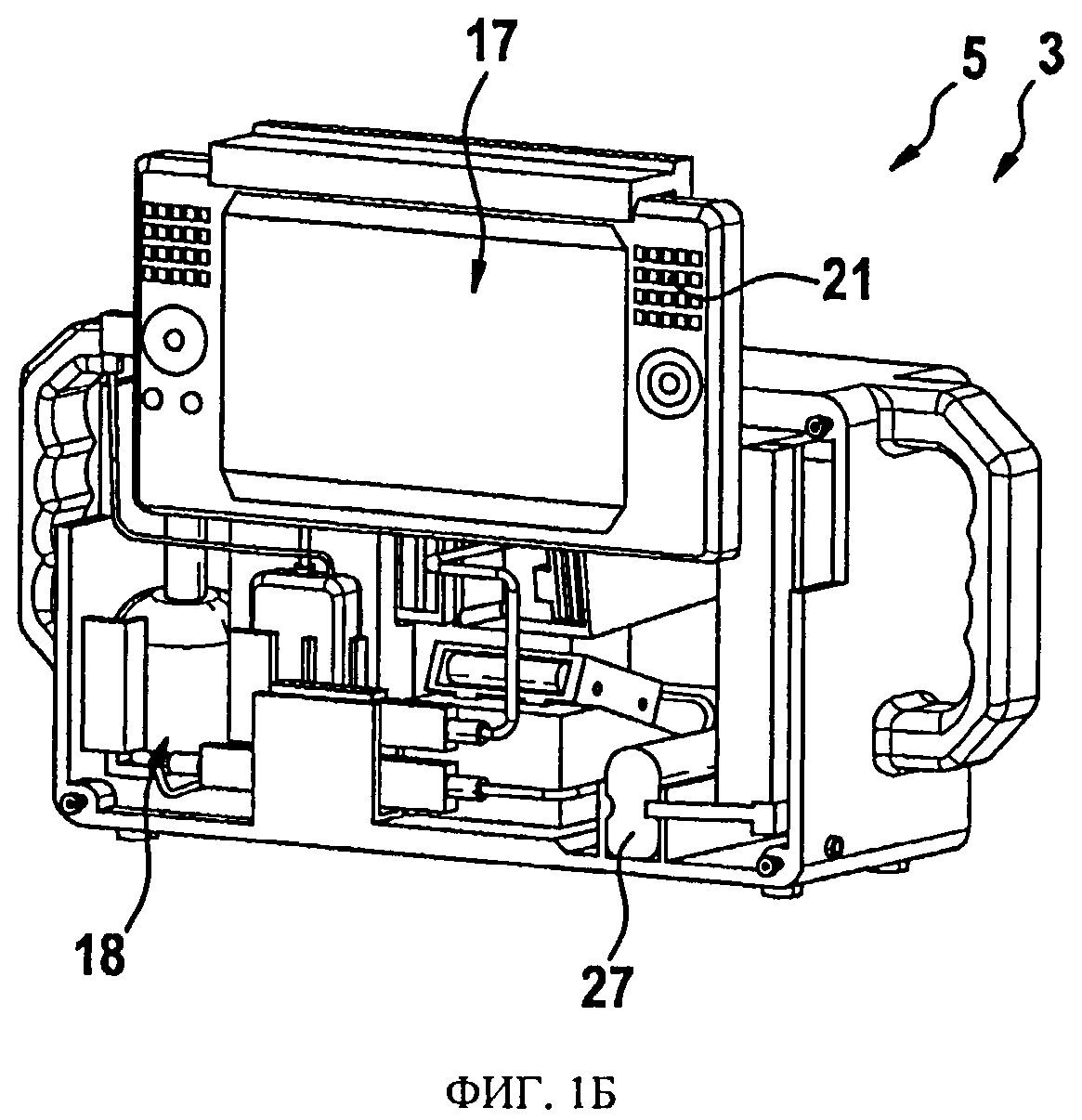
На фиг.1 представлено изображение измерительного приспособления и измерительной системы для автоматического трехмерного обмера помещения согласно одному из примеров осуществления настоящего изобретения. На фиг.1А показан вид измерительной системы спереди, а на фиг.1Б - сзади. В измерительном устройстве реализована идея о выполнении автоматической съемки для получения подходящих одиночных снимков высокого разрешения, а также об обеспечении непрерывного руководства перемещением пользователя в режиме реального времени внутри помещения, для которого выполняется реконструкция.
В данном примере осуществления измерительная система 5 содержит съемочный аппарат 7. Съемочный аппарат содержит первый датчик 9 изображений и второй датчик 11 изображений. Второй датчик 11 выполнен в виде камеры с возможностью получения видеоизображений, а первый датчик 9 выполнен в виде камеры высокого разрешения.
Измерительное приспособление 3, или измерительная система 5, содержит также устройства 18, 19 для определения (измерения) местоположения. На передней стороне измерительного приспособления 3 устройства 19 выполнены в виде нескольких однолучевых лазерных дальномеров 19, калиброванных относительно камеры. Устройства 18 для определения местоположения, расположенные на задней стороне измерительного приспособления 3 (фиг.1Б), выполнены в виде кинематических датчиков 18, например датчиков ускорения, датчиков угловой скорости и/или датчиков положения. Устройства 18, 19 для определения местоположения обеспечивают получение данных (координат X, Y и Z), служащих для определения положения измерительного приспособления 3 в помещении. Кроме того, посредством устройств 18, 19 можно получать данные (например, угол наклона относительно горизонтали и вертикали), служащие для определения ориентации измерительного приспособления.
В частности, данные измерений расстояния, например с помощью лазерных дальномеров 19, могут использоваться для метрического масштабирования снимков высокого разрешения. Кроме того, эти данные могут использоваться для выполнения трехмерной реконструкции 23 в режиме реального времени и второй точной реконструкции 25.
Данные, полученные с помощью кинематических датчиков 18, могут также использоваться, например, для предварительного ориентирования системы координат измерительного приспособления 3.
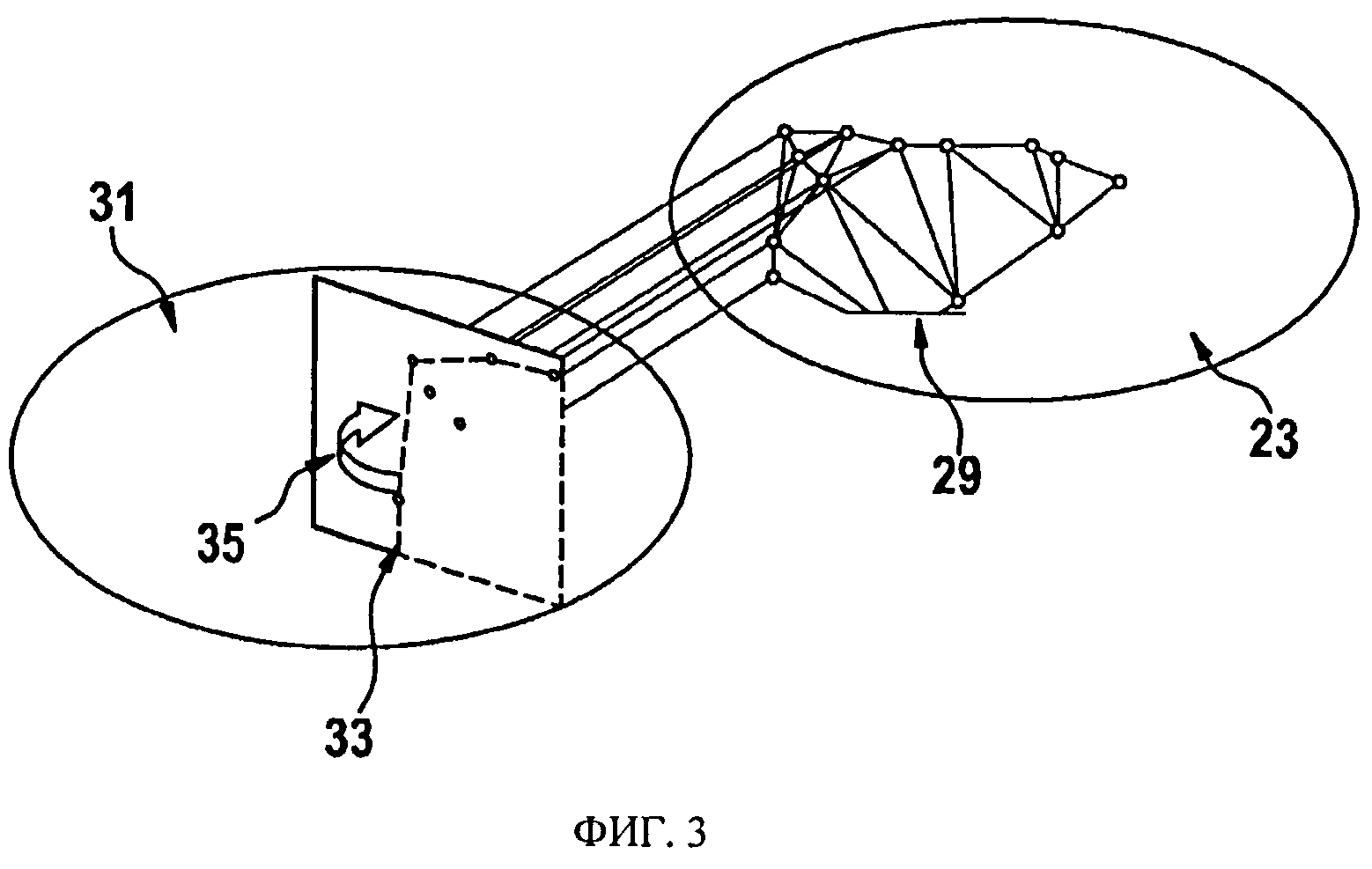
Измерительное приспособление содержит также устройство 17 вывода. Этот устройство вывода расположено на стороне, обращенной к пользователю, и выполнено, например, в виде дисплея, на котором могут отображаться текущие изображения прямой передачи видеокамеры и наложенная на них реконструкция помещения, формируемая в режиме реального времени. Как показано на фиг.3, в устройстве 17 вывода может быть реализовано руководство 35 перемещением пользователя, в процессе которого происходит наложение видеоизображений 31 и реконструкции 23, формируемой в режиме реального времени.
Кроме того, измерительная система 5 оснащена процессором (вычислительным устройством) 21. В изображенном примере осуществления процессор 21 встроен непосредственно в систему. В альтернативном варианте процессор может представлять собой внешнее устройство, например ноутбук или карманный персональный компьютер (КПК), связанный с измерительным приспособлением 3, например, но беспроводному каналу. Измерительное приспособление 3 содержит, кроме того, корпус, удобные боковые ручки и источник питания 27, например аккумулятор. Измерительная система 5 и измерительное приспособление 3 могут представлять собой приборы, управляемые вручную и встраиваемые, в случае необходимости, в ручные машины.
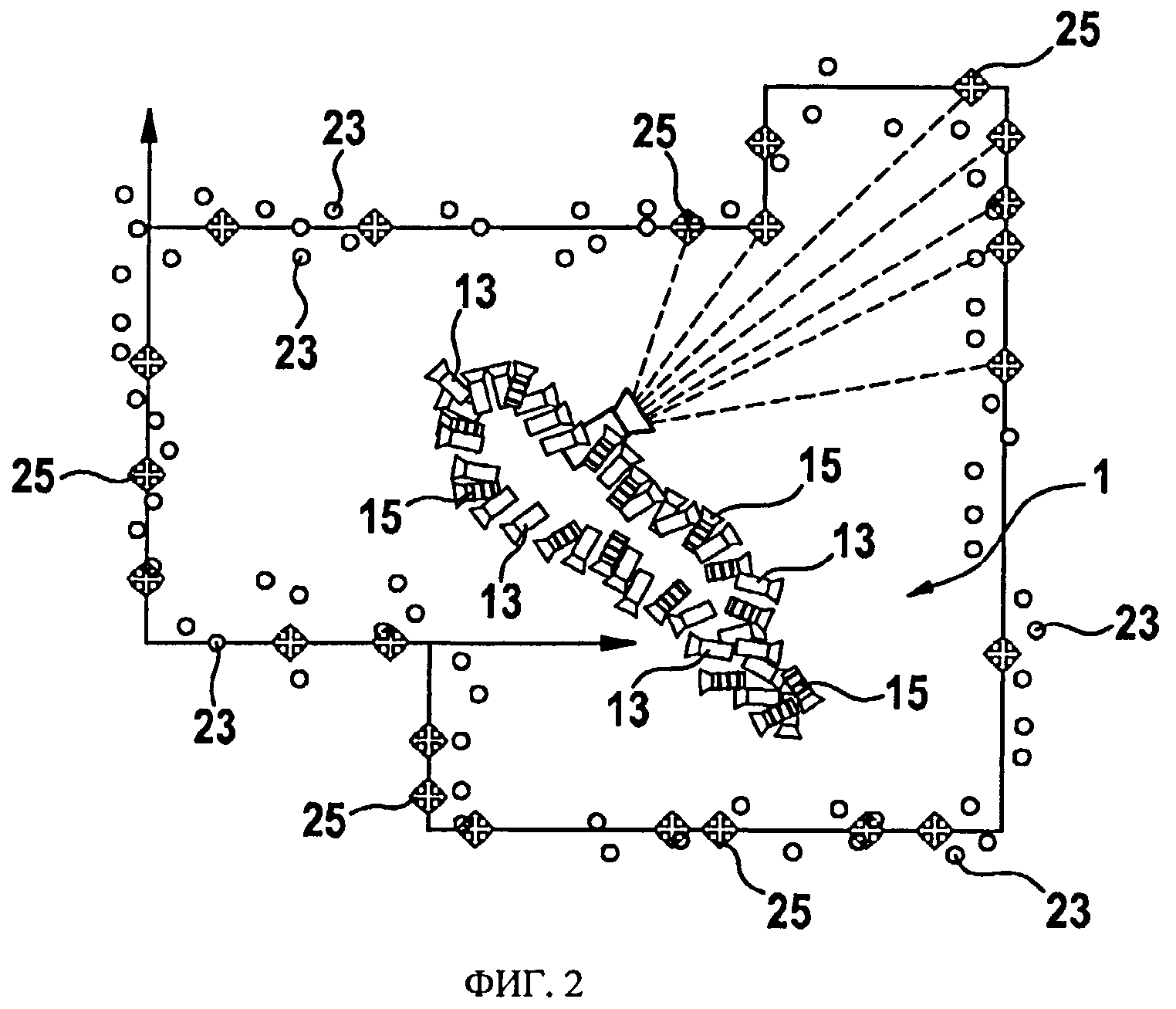
На фиг.2 представлено схематическое изображение (вид сверху) обмеряемого помещения с положениями при съемке и результатами реконструкции согласно одному из примеров осуществления настоящего изобретения. Для выполнения обмера пользователь входит с измерительным приспособлением 3 в помещение 1 и инициализирует обмер, например посредством включения камеры 9, 11. В альтернативном варианте инициализация может осуществляться следующим образом: для интуитивного определения системы координат можно инициализировать измерительную систему 5, или измерительное приспособление 3, выполнив в одном из углов помещения снимок, который затем будет представлять собой пространственную систему координат для трехмерной реконструкции. Инициализация грубой локализации измерительной системы 3 в режиме реального времени может быть осуществлена с помощью снимка, наложенного на первый снимок.
После запуска обмера пользователь перемещается с измерительным приспособлением 3 по помещению 1. Например, он может перемещаться по помещению, располагаясь спиной к стене. После инициализации обмера второй датчик 11 изображений (камера) автоматически производит видеосъемку с низким разрешением в режиме прямой передачи. Пользователь видит получаемые видеоизображения непосредственно в устройстве 17 вывода, расположенном на задней стороне измерительного приспособления 3. Текущие видеоизображения передаются в процессор 21. В процессоре в режиме реального времени формируется трехмерная реконструкция помещения. Как показано на фиг.3, реконструкция 23, формируемая в режиме реального времени, проецируется на видеоизображение, получаемое в режиме прямой передачи посредством второй камеры 11 и отображаемое в устройстве 17 вывода. Например, реконструкция 23 может накладываться в виде полупрозрачного кадра на видеоизображение 31. Тем самым обеспечивается обратная связь пользователя, осуществляемая в онлайн-режиме, то есть в режиме реального времени, и дающая представление о статусе реконструкции.
Точки помещения, вычисленные в ходе выполнения реконструкции 23 в режиме реального времени, показаны на фиг.2 в виде кружков. Реконструкция 23, формируемая в режиме реального времени и основанная па получаемых видеоизображениях, представляет собой грубое приближение, что видно по отклонению точек 23 от фактических границ помещения.
Процессор 21 определяет в помещении точки 15, геометрически подходящие для выполнения одиночных снимков высокого разрешения с помощью первой камеры 9.
Снимки высокого разрешения обеспечивают возможность выполнения точной, высококачественной трехмерной реконструкции 25. Вторая трехмерная реконструкция 25 показана на фиг.2 крестиками. Точность этой реконструкции с очевидностью следует из того, что крестики располагаются непосредственно на границах помещения. Точки 15, геометрически подходящие для размещения измерительного приспособления 3 в помещении 1, показаны значками, изображающими камеру с полосками.
Процессор 21 запускает процесс получения снимков высокого разрешения посредством первой камеры 9. Одиночные снимки высокого разрешения могут быть использованы на этапе дополнительной обработки для уточнения реконструкции, полученной в режиме реального времени. С помощью данных, касающихся положения и ориентации измерительной системы на момент выполнения снимка, можно, например, повысить надежность и скорость этой дополнительной обработки. Эти данные могут быть получены с помощью устройств 18, 19 для определения местоположения. Лазерные дальномеры 19 могут быть выполнены с возможностью определения, для каждого из видеоизображений и снимков высокого разрешения, расстояния по меньшей мере до одной опорной точки в помещении. Определение текущего положения измерительного приспособления может при этом осуществляться относительно опорных точек, или ориентиров, на видеоизображениях. В качестве ориентиров могут выступать, например, примечательные объекты, например дверные рамы или штепсельные розетки, различаемые на соответствующих снимках. На основе измерения расстояния можно, например, осуществить метрическое масштабирование, то есть предусмотреть масштаб, в случае трехмерной реконструкции в режиме реального времени и/или высокоточной второй трехмерной реконструкции. Следовательно, данные измерений расстояния можно использовать при выполнении трехмерной реконструкции или моделировании.
Кроме того, процессор осуществляет вычисления, обеспечивающие выполнение второй (точной) трехмерной реконструкции на основе снимков высокого разрешения. Эти вычисления могут осуществляться, например, в оффлайн-режиме. Для этого снимки высокого разрешения могут быть сохранены в памяти. В альтернативном варианте может осуществляться объединение руководства перемещением пользователя на основе видеоизображений в режиме реального времени с точной трехмерной реконструкцией на основе одиночных снимков высокого разрешения. Качество визуализации результатов измерений, реализуемой, например, в устройстве 17 вывода, может быть повышено посредством технологии дополненной реальности. В измерительной системе, где реализуется измерение трехмерной геометрии помещения в сочетании с трехмерной навигацией пользователя в режиме реального времени, могут одновременно протекать несколько рабочих этапов. Этап, включающий грубый трекинг измерительной системы в режиме реального времени через камеру 11 с возможностью получения видеоизображений, поддерживаемый, в случае необходимости, инерциальными, или кинематическими, датчиками 19, и этап автоматического получения с помощью камеры 9 снимков высокого разрешения в геометрически подходящих точках помещения протекают параллельно с формированием грубой трехмерной реконструкции 23 геометрии помещения, посредством которой можно определять положение измерительной системы в онлайн-режиме. Другой рабочий этап, а именно выполнение высокоточной трехмерной реконструкции 25 на основе автоматически получаемых одиночных снимков и уже имеющейся информации, включающей грубую оценку местоположения и ориентации измерительной системы 3 на момент выполнения одиночных снимков, может также протекать параллельно вышеупомянутым этапам или непосредственно вслед за ними.
Этапы трекинга в режиме реального времени и получения снимков высокого разрешения включают в отдельности следующее: нахождение простых естественных ориентиров на снимках, поиск соответствующих точек на непрерывно обновляющейся начальной реконструкции, определение текущего местоположения измерительной системы и ориентирование по соответствующим отличительным элементам в текущих изображениях (кадрах) начальной реконструкции, определение кадров, подходящих для выполнения грубой трехмерной реконструкции 23 в режиме реального времени, и передачу этих кадров для использования на втором рабочем этапе, определение хороших, с точки зрения геометрии, условий для выполнения одиночных снимков высокого разрешения и спуск затвора камеры 9 высокого разрешения с последующей передачей этих одиночных снимков и соответствующих положений камеры для использования на третьем рабочем этапе. Протекающий параллельно этап выполнения грубой реконструкции 23 в режиме реального времени может включать в отдельности следующее: обработку кадров системы трекинга в режиме реального времени, интегрирование естественных ориентиров в эти кадры в существующей начальной реконструкции, обновление начальной реконструкции с помощью методов локальной и быстрой оптимизации.
Другой рабочий этап, протекающий параллельно вышеупомянутым этапам или, в качестве альтернативы, непосредственно вслед за ними и представляющий собой процесс выполнения высокоточной второй трехмерной реконструкции 25 на основе одиночных снимков, может включать следующее: нахождение сложных и очень точных естественных ориентиров на одиночных снимках высокого разрешения (в качестве альтернативы - нахождение естественных "каркасных" отличительных элементов, позволяющих предусмотреть ориентиры даже в слаботекстурированных областях изображений), определение элементов соответствия между одиночными снимками путем ограничения зоны поиска на основе имеющейся информации о местоположении, полученной на первом рабочем этапе, благодаря чему можно повысить надежность и скорость оценки, автоматическое выполнение трехмерной реконструкции 25 соответствующих отличительных элементов изображений и получение высокоточного трехмерного массива ("облака точек"), отображаемого пунктирными линиями, трехмерное моделирование на основе высокоточной трехмерной реконструкции и, в одном из вариантов осуществления, интегрированных результатов лазерных измерений с целью получения трехмерной модели помещения в рамках системы автоматизированного проектирования CAD (от англ. Computer-Aided Design).
На фиг.3 схематически изображен процесс реконструкции в режиме реального времени и руководства перемещением пользователя согласно одному из примеров осуществления настоящего изобретения. В правом эллипсе схематически показана реконструкция 23, выполняемая в режиме реального времени, или онлайн-режиме. С этой целью можно выполнить, например, моделирование трехмерной триангулированной сети 29. В левом эллипсе показано текущее изображение 31 прямой передачи видеокамеры. Трехмерная реконструкция 23 в режиме реального времени может быть спроецирована на двумерное видеоизображение 31, например, в виде накладываемого на это изображение полупрозрачного кадра. Это наложение обозначено ссылочным номером 33. Направление 35 перемещения пользователя указано стрелкой.
Быстрая и грубая локализация обеспечивает получение измерительной системой в любой момент времени информации о своем местоположении внутри помещения и о том, насколько хороша выполненная к этому моменту времени трехмерная реконструкция. Тем самым обеспечиваются визуализация текущего местоположения и обратная связь пользователя, дающая представление о статусе ранее выполненного обмера. Это может осуществляться, например, в виде светофора, где, например, зеленый свет указывает на высококачественную реконструкцию в режиме реального времени, желтый - на неточную реконструкцию, а красный - на отсутствие реконструкции. В альтернативном варианте нужное местоположение может быть указано пользователю с помощью стрелок. Визуализация в онлайн-режиме позволяет пользователю простым образом идентифицировать внутри помещения области, которые уже были охвачены съемкой, и области, в которых еще предстоит провести измерения.
Как показано на фиг.3, можно осуществить дальнейшую оптимизацию руководства перемещением пользователя путем соединения трехмерных облаков точек, реконструированных в онлайн-режиме. С этой целью для трехмерных облаков точек, полученных в онлайн-режиме, выполняется - непосредственным образом и тоже в режиме реального времени, - вычисление триангуляции в соответствии с имеющимися данными. Полученная таким образом трехмерная сетка, включающая реконструированные ранее области, может теперь проецироваться в любой момент времени обратно на текущее изображение прямой передачи видеокамеры. Визуализация высокого уровня позволяет идентифицировать области изображения, для которых уже мог бы быть выполнен расчет трехмерной геометрии. Дополнительно поддерживаемая функция, обеспечивающая отображение визуальной информации, например показанной на фиг.3 стрелки, способствует активному и полному охвату пользователем геометрии помещения.
В случае, например, прерывания трекинга, выполняемого в режиме реального времени, возможность возобновления обмера помещения обеспечивается повторной регистрацией областей внутри помещения, для которых уже была выполнена съемка. Эта возможность, основанная на сохранении в памяти полученных снимков и содержащейся в них информации, реализуется следующим образом: пользователь перемещает, например, измерительное приспособление 3 до тех пор, пока на текущих изображениях прямой передачи не будут найдены сохраненные в памяти ориентиры и не произойдет повторное определение положения (локализация) системы. После этого пользователь может продолжить обмер помещения 1 с этого места.
В заключение следует отметить, что выражения типа "содержащий" и аналогичные ему не исключают, что могут быть предусмотрены другие элементы или этапы. Далее, следует отметить, что упоминание какого-либо элемента в единственном числе не исключает использования нескольких таких элементов. Кроме того, отличительные признаки, описанные в различных примерах осуществления настоящего изобретения, можно комбинировать друг с другом произвольным образом. Следует также отметить, что ссылочные обозначения, используемые в пунктах формулы изобретения, не должны рассматриваться как ограничивающие объем формулы изобретения.
Ручная машина с динамическим виброгасителем
Многоспектральный датчик
Ручная машина, прежде всего лобзиковая пила, дисковая пила, фрезерная машина или рубанок
Электромеханический усилитель тормозного привода
Соединительное устройство
Кабельный ввод для ручной машины
Электрическая машина
Электронный модуль
Узел-абонент коммуникационной системы с функционально отдельным устройством памяти событий передачи
Щетка стеклоочистителя с переходником для ее закрепления на ее рычаге
Соединительное устройство для соединения рычага щетки стеклоочистителя с щеткой стеклоочистителя
Ручная машина с переключаемым механизмом
Тормозной диск
Блок управления и способ для приведения в действие средств безопасности, а также датчик для выдачи сигнала аварийной ситуации
Электродинамическое тормозное устройство для универсального двигателя
Способ и устройство для распознавания детонационного стука при смене режимов работы двигателя внутреннего сгорания
Технологическая машина, прежде всего ручная машина
Определение частоты вращения электрической машины
Устройство управления для транспортного средства и способ помощи водителю транспортного средства при парковке
Тормозной диск

