Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ КОПАНИЯ И РЫХЛЕНИЯ ЛЮБЫХ ПОЧВ
Вид РИД
Изобретение
Изобретение относится к области сельского хозяйства, в частности к сельскохозяйственному оборудованию и инструменту, и предназначено для копания и рыхления любых почв.
Известен способ извлечения растений [1]. Способ включает внедрение в почву вил, имеющих черенок с рукояткой, и извлечение растений. Извлечение растений осуществляют, по крайней мере, двумя вилами, жестко соединенными с телескопическим черенком под углом. Черенок выполнен регулируемым по длине. Концы вил внедряют в корневую систему растений на требуемую глубину, затем опускают рукоятки вниз для обеспечения вертикально направленной вверх подъемной силы, извлекающей растение.
Недостатками данного технического решения являются:
- низкая эффективность и производительность при копании и рыхлении тяжелых почв;
- низкая мобильность при работе;
- требуются большие усилия при производстве работ.
Наиболее близким техническим решением является Устройство для копания и рыхления земли [2]. Устройство содержит рычажный механизм, рабочий орган с черенком, возвратную пружину, передвижной механизм, состоящий из рамы с колесами, вращающимися вокруг оси. Недостатками данного технического решения являются:
- низкая эффективность и производительность копания тяжелых почв;
- при подъеме почвы рабочим органом появляется реактивная сила, откатывающая устройство в сторону оператора;
- требуются большие трудозатраты при производстве работ.
Цель изобретения - повышение эффективности уменьшения физической нагрузки на оператора при копании и рыхлении любых почв.
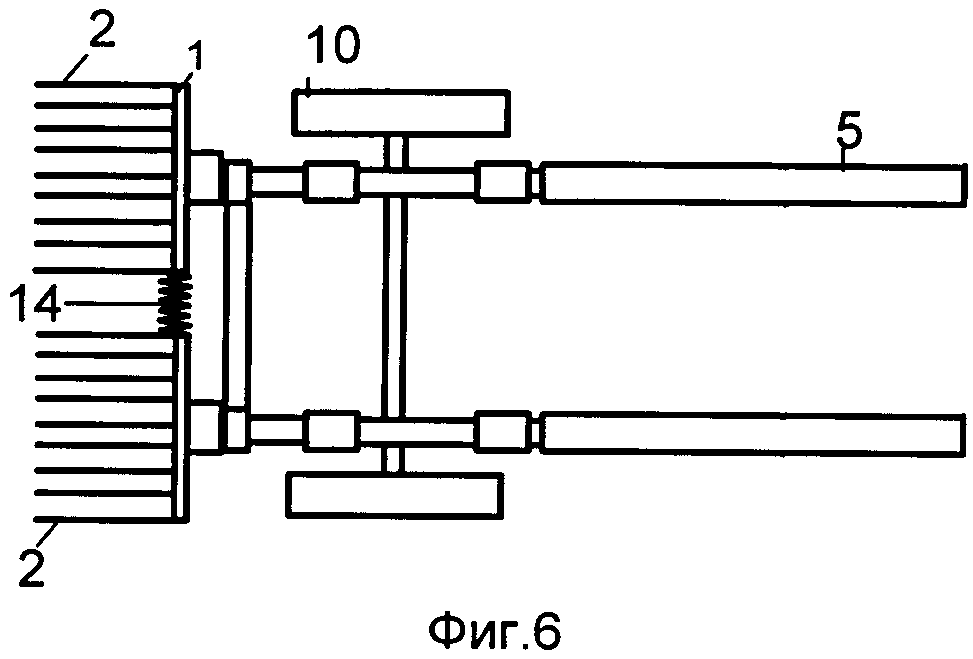
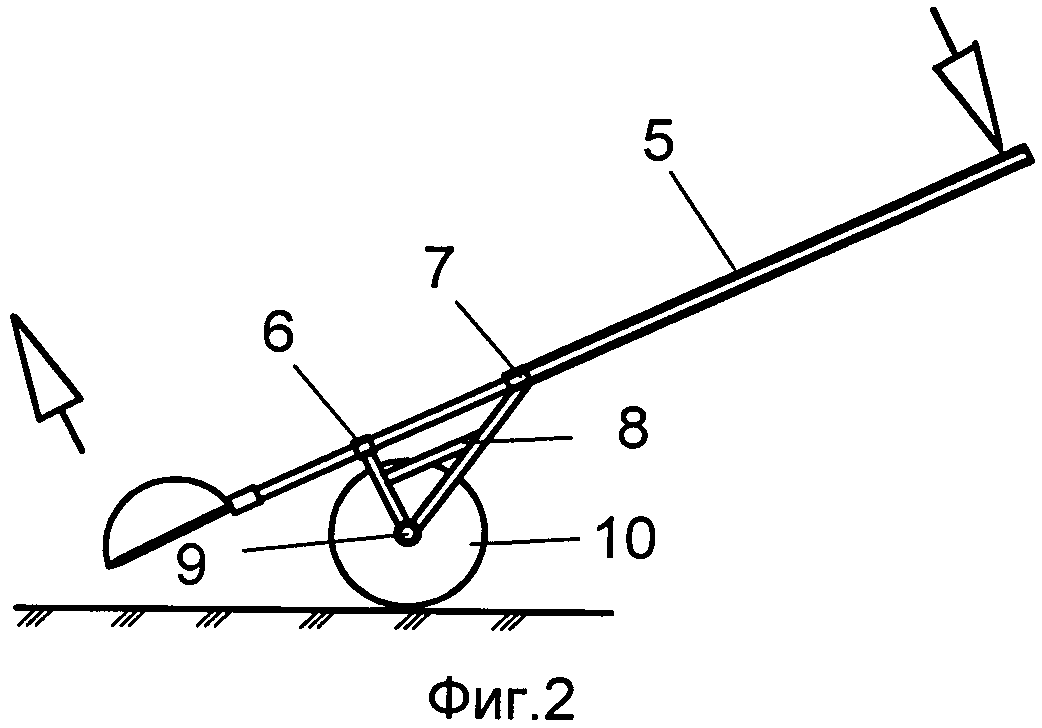
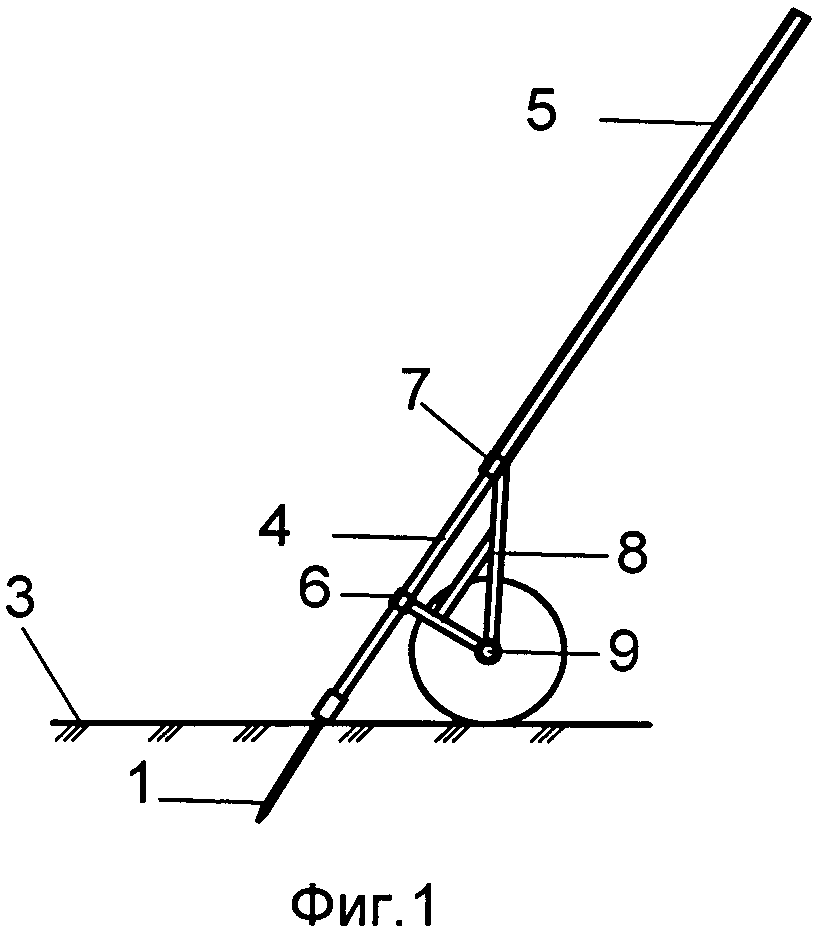
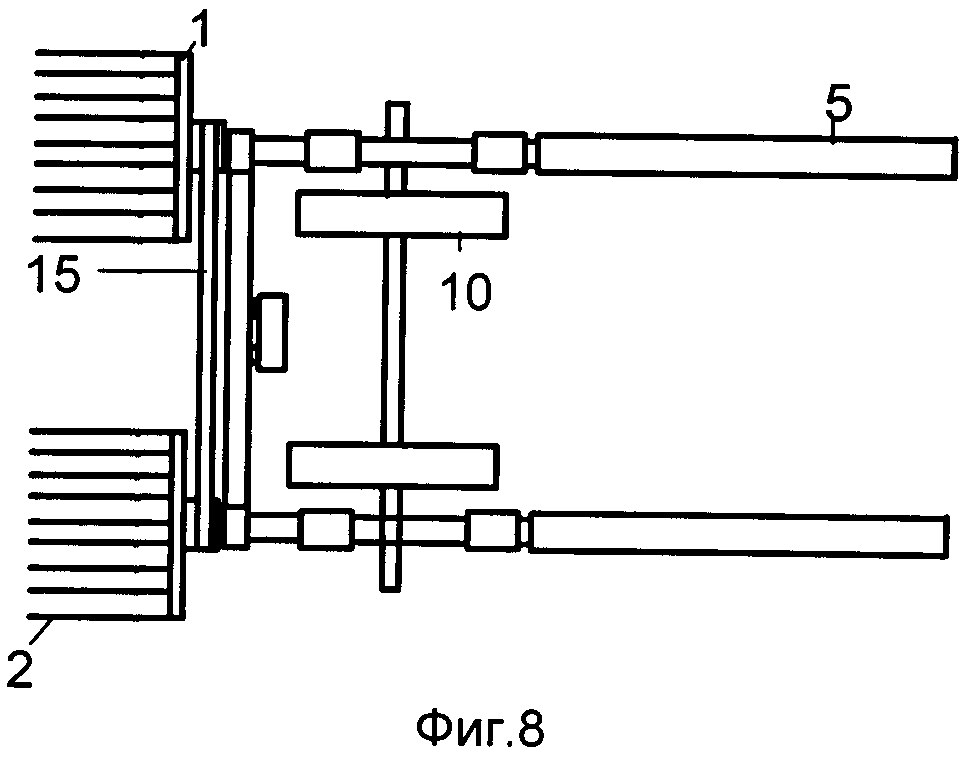
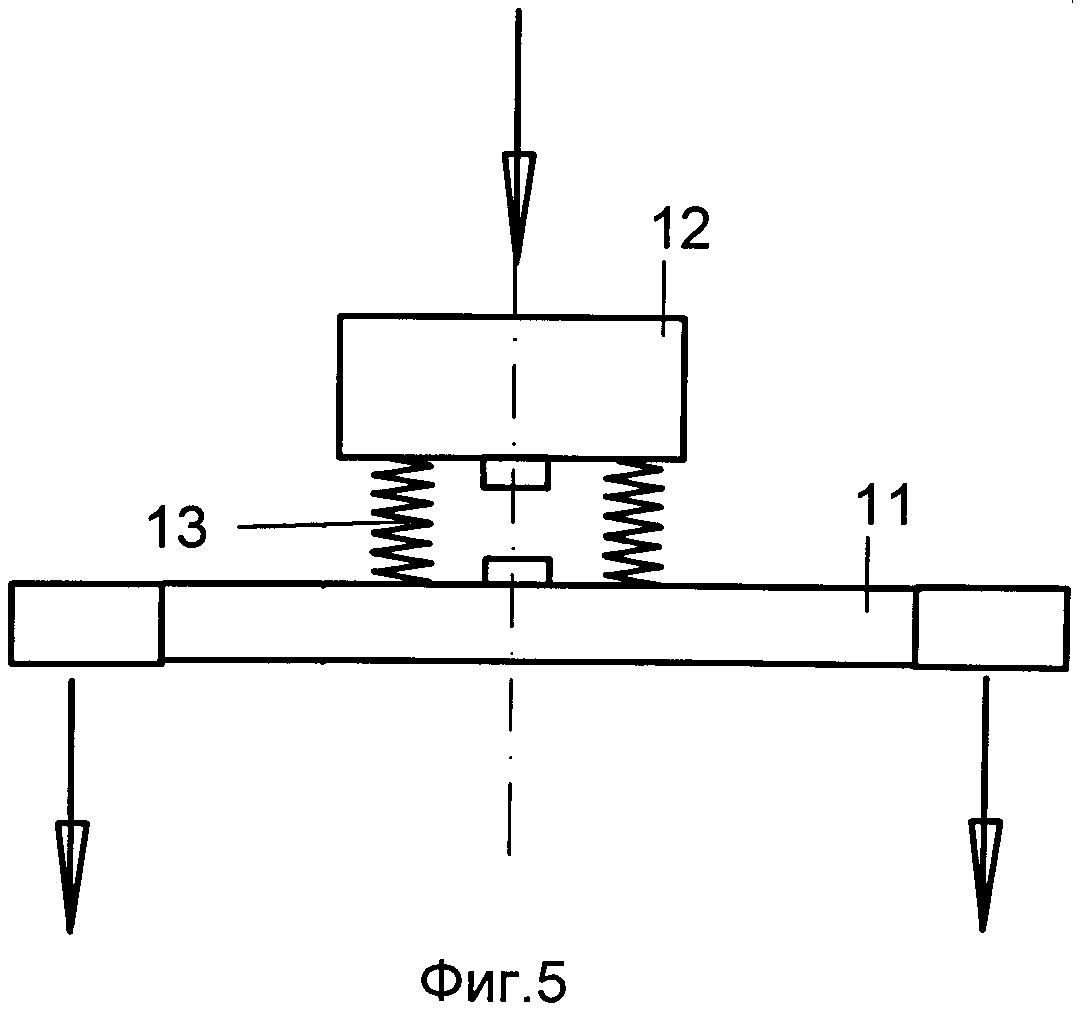
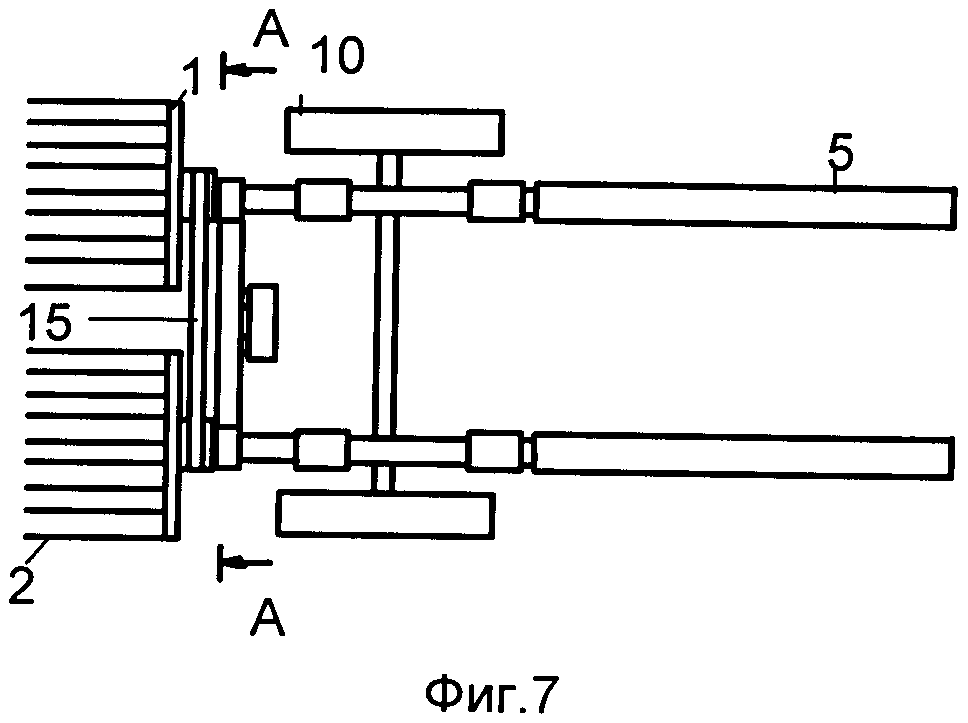
Поставленная цель достигается это тем, что рабочие органы, состоящие из стержней оператором одновременно внедряются в почву (фиг. 1). Рабочие органы соединены с телескопическими черенками, которые вставлены в рукоятку и проходят через нижние патрубки и верхние патрубки рычажных лопат. Нижние патрубки и верхние патрубки жестко закреплены на двух упорах, которые жестко приварены к общей трубе и одновременно вместе с ней вращаются вокруг оси колес. Таким образом, устройство имеет два рабочих органа с черенками в виде рычажных лопат под обе руки оператора с жестко закрепленными упорами на общей трубе. Так, после внедрения рабочих органов в почву оператор осуществляет подъем почвы рабочими органами. В работе участвуют обе руки оператора и совместные усилия обеих рук, сильно облегчают процесс копания и рыхления почвы. Приспособление имеет две точки передачи усилий на рабочие органы, которые проходят через ось симметрии каждого рабочего органа. Усилие, которое передается от черенков на нижние патрубки, направлено вверх, а усилие, которое передается на верхние патрубки, направлено вниз, так что появляется вращающий момент от пары сил. Таким образом, при подъеме почвы рабочими органами не появляется реактивная сила, откатывающая устройство в сторону оператора (фиг. 2). Опорный и передвижной механизм состоит из оси вращения колес и самих колес. Нижние патрубки и верхние патрубки находятся в равновесном состоянии относительно вертикальной оси, проходящей через ось вращения колес в момент положения внедрения рабочего органа в почву (фиг. 1). Внедрение рабочих органов осуществляется через съемное приспособление для внедрения рабочих органов лопат в почву, снабженное съемным ударным башмаком с возвратными пружинами (фиг. 5). Таким образом при копании тяжелых почв приспособление для внедрения рабочих органов лопат в почву позволит облегчить процесс вдавливания рабочего органа в почву. Рабочие органы смежных рычажных лопат могут быть соединены друг с другом пружиной растяжения (фиг. 6). Таким образом можно улучшить совместную работу смежных рычажных лопат. Рабочие органы могут также приводиться к совместной работе с помощью ременной передачи через шкивы (фиг. 7, 8, 9). Колеса могут быть расположены внутри между рычажными лопатами, и в этом случае устройство будет более маневренным в работе (фиг. 8).
Для облегчения вдавливания рабочего органа в землю стержни являются острозубыми. Ширина прозоров между стержнями у рабочего органа равна 50÷150 мм и зависит от твердости почвы. При копании тяжелых суглинистых почв расстояния между стержнями можно увеличивать до 150 мм, а при копании легких песчаных и супесчаных почв уменьшать до 50 мм. Диаметр стержней рабочего органа равен 10÷16 мм. При копании тяжелых суглинистых почв диаметр стержней можно принимать 16 мм.
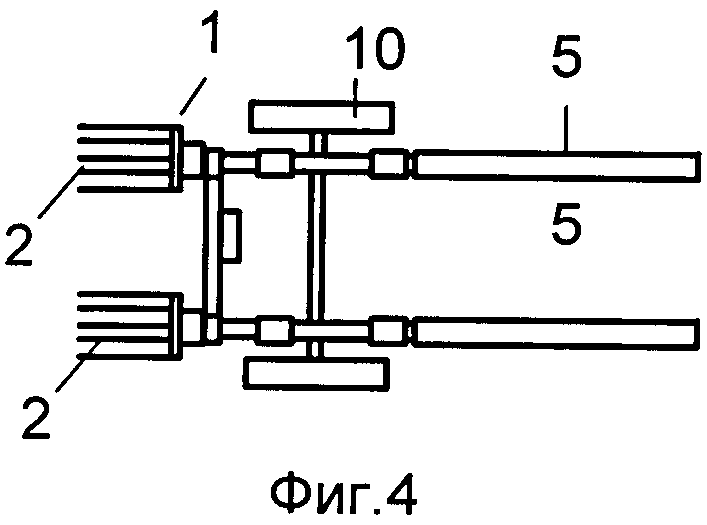
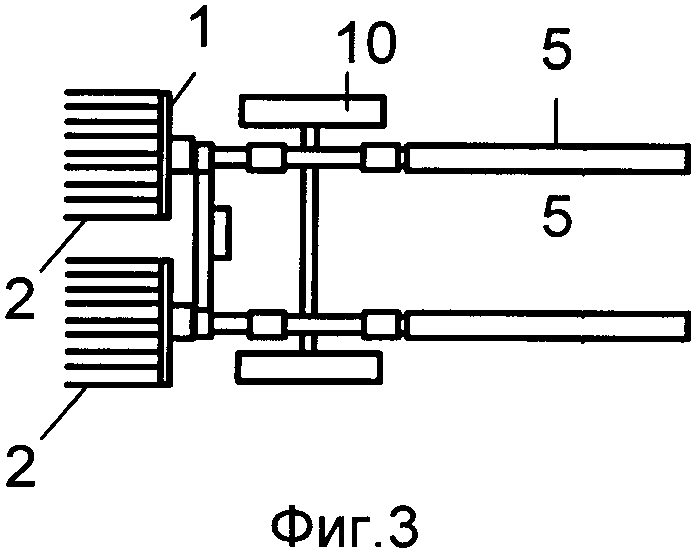
Ширина расстояния между рабочими органами смежных рычажных лопат может быть 50÷400 мм и зависит от твердости почвы и конструктивного решения. При копании тяжелых суглинистых почв расстояния между рабочими органами смежных рычажных лопат можно принимать равными 150 мм, и это увеличивает общую ширину захвата при копании и рыхлении почвы (фиг. 3). Величину расстояния между узкими рабочими органами можно принимать равной 400 мм, только в этом случае при копании между смежными рычажными лопатами остается непрокопанная полоса, которая будет прокапываться следующим проходом (фиг. 4). Ширина расстояния между соседними черенками назначается из условия размещения оператора между ними и равна 500÷600 мм.
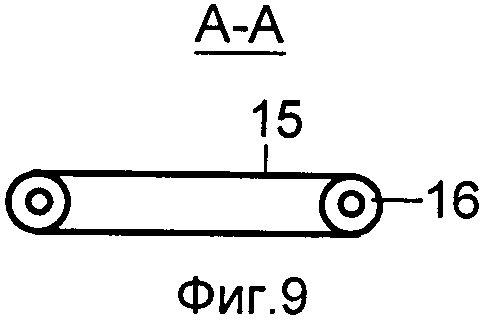
На фиг. 1 изображено устройство для копания и рыхления любых почв с заглубленным рабочим органом, общий вид; на фиг. 2 изображено устройство для копания и рыхления любых почв в момент поднятия рабочего органа с почвой; на фиг. 3 изображено устройство для копания и рыхления любых почв, вид сверху; на фиг. 4 изображено устройство для копания и рыхления любых почв с узкими рабочими органами, вид сверху; на фиг. 5 изображено приспособление для внедрения рабочих органов лопат в почву со съемным ударным башмаком; на фиг. 6 изображено устройство для копания и рыхления любых почв, рабочие органы которых соединены друг с другом пружиной растяжения, вид сверху; на фиг. 7 изображено устройство для копания и рыхления любых почв, рабочие органы которых соединены друг с другом с помощью ременной передачи, вид сверху; 8 изображено устройство для копания и рыхления любых почв рабочие органы, которых соединены друг с другом с помощью ременной передачи, а колеса расположены внутри между рычажными лопатами, вид сверху; на фиг. 9 разрез А-А, на фиг. 7.
Устройство для копания и рыхления тяжелых почв состоит из рабочих органов 1, состоящих из стержней 2 для копания и рыхления почвы 3. Рабочий орган 1 соединен с телескопическим черенком 4, который вставлен в рукоятку 5 и проходит через нижний патрубок 6 и верхний патрубок 7. Нижний патрубок 6 и верхний патрубок 7 жестко закреплены на упоре 8, который вращается вокруг оси колес 9. Опорный и передвижной механизм состоит из оси вращения колес 9 и колес 10. Нижний патрубок 6 и верхний патрубок 7 находятся в равновесном состоянии относительно вертикальной оси 11, проходящей через ось вращения колес 9 в момент положения внедрения рабочего органа 1 в почву 3. Внедрение рабочих органов 1 осуществляется через приспособление для внедрения рабочих органов лопат в почву 11, снабженное съемным ударным башмаком 12 с возвратными пружинами 13. Рабочие органы 1 смежных рычажных лопат соединены друг с другом пружиной растяжения 14, либо приводятся совместную работу с помощью ременной передачи 15 через шкивы 16.
Устройство для копания и рыхления любых почв работает следующим образом. Рабочие органы 1, состоящие из стержней 2, оператором одновременно внедряются в почву 3 (фиг. 1). Рабочие органы 1 соединены с телескопическими черенками 4, которые вставлены в рукоятку 5 и проходят через нижние патрубки 6 и верхние патрубки 7. Нижние патрубки 6 и верхние патрубки 7 жестко закреплены на двух упорах 8, которые одновременно вращаются вокруг оси колес 9. Таким образом, устройство имеет два рабочих органа 1 с телескопическими черенками 4 в виде рычажных лопат под обе руки оператора с жестко закрепленными упорами 8 на общей трубе. Так, после внедрения рабочих органов 1 в почву 3 оператор осуществляет подъем почвы 3 рабочими органами 1. Приспособление имеет две точки передачи усилий на рабочие органы 1, которые проходят через ось симметрии каждого рабочего органа 1. Усилие, которое передается от черенков 4 на нижние патрубки 6, направлено вверх, а усилие, которое передается на верхние патрубки 7, направлено вниз, так что появляется вращающий момент от пары сил. Таким образом, при подъеме почвы 3 рабочими органами 1 не появляется реактивная сила, откатывающая устройство в сторону оператора (фиг. 2). Опорный и передвижной механизм состоит из оси вращения колес 9 и самих колес 10. Нижние патрубки 6 и верхние патрубки 7 находятся в равновесном состоянии относительно вертикальной оси, проходящей через ось вращения колес 9 в момент положения внедрения рабочего органа в почву 3 (фиг. 1). Внедрение рабочих органов 1 осуществляется через приспособление для внедрения рабочих органов лопат в почву 11, снабженное съемным ударным башмаком 12 с возвратными пружинами 13 (фиг. 5). Рабочие органы 1 смежных рычажных лопат могут быть соединены друг с другом пружиной растяжения 14 (фиг. 6). Рабочие органы 1 могут также приводиться к совместной работе с помощью ременной передачи 15 через шкивы 16 (фиг. 7, 8, 9).
Для облегчения вдавливания рабочего органа 1 в землю стержни 2 являются острозубыми. Ширина прозоров между стержнями 2 у рабочего органа 1 равна 50÷50 мм и зависит от твердости почвы 3. Диаметр стержней 2 рабочего органа 1 равен 12÷16 мм.
Предлагаемое техническое решение имеет широкий диапазон применения и позволяет использовать обе руки оператора при копании и рыхлении почвы, усиливая производительность труда за счет совместного и слаженного действия. Оно эффективнее аналогов и является более экономичным техническим решением.
Источники информации
1. Пат. №2466518 Российской Федерации МПК А01В 1/00, A01D 9/00. Способ извлечения растений/ Ламердонов К.З.; заяв. 13.05.2011. опубл. 20.11.2012. (Аналог).
2. Пат. №2462850 Российской Федерации МПК А01В 1/00, Устройство для копания и рыхления земли / Ламердонов К.З.; заяв. 05.07.2012. опубл. 10.10.2012. (Прототип).
Способ возведения плиточного крепления
Способ строительства фундамента в зимнее время
Устройство для анкеровки противооползневых сооружений
Проволочный анкер с коническим наконечником
Способ копания ям в сыпучих грунтах
Способ копания ям в связных грунтах
Способ орошения
Габионная подпорная стенка
Устройство для выкапывания картофеля
Рычажное устройство для подметания улиц и дорог
Способ возведения плиточного крепления
Способ строительства фундамента в зимнее время
Способ копания ям в сыпучих грунтах
Способ копания ям в связных грунтах
Способ орошения
Габионная подпорная стенка
Устройство для выкапывания картофеля
Способ очистки воды для полива сельскохозяйственных культур
Способ строительства вертикальных дрен
Противопаводковое сооружение

