Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА СОВМЕСТНОЙ ОБРАБОТКИ ИЗМЕРЕНИЙ ДАЛЬНОСТИ И СКОРОСТИ ДЛЯ МНОГОДИАПАЗОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ КРУГОВОГО ОБЗОРА
Вид РИД
Изобретение
Изобретение относится к радиолокации и может быть использовано для обработки сигналов двухдиапазонных радиолокационных систем кругового обзора.
Одним из основных режимов работы существующих и перспективных радиолокационных систем (РЛС) кругового обзора является автоматическое сопровождение целей при сохранении обзора. В случае, когда круговой обзор достигается при помощи механического сканирования, длительный интервал между приходом измерений приводит к существенно возрастанию погрешностей или даже срыву сопровождения.
Одним из способов уменьшения интервала прихода измерений для РЛС с механическим сканированием является использование нескольких антенных полотен, обращенных в разные стороны [1]. В этом случае целесообразно использовать антенны разных диапазонов, что существенно повышает помехозащищенность РЛС и, потенциально, точность системы в целом.
Однако такой подход требует усложнения алгоритмов обработки, поскольку необходимо использовать отождествление сигналов, получаемых от цели в разное время в разных диапазонах, и алгоритмы их совместной обработки. Следует, однако, отметить, что существующие алгоритмы совместной обработки [2], основанные на оптимальном оценивании, рассчитаны на обработку одновременно поступающих измерений.
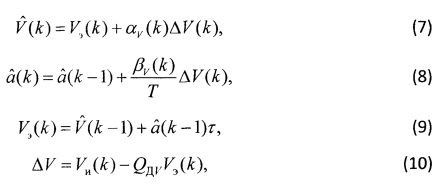
Кроме того, типовые алгоритмы фильтрации обеспечивают формирование оптимальных оценок только на моменты прихода измерений, интервал между которыми при круговом обзоре достигает десяти и более секунд, что приводит к достаточно редкой передаче результатов оценивания потребителям. В то же время для решения задач управления и формирования команд целеуказаний эта информация должна поступать непрерывно.
В такой ситуации целесообразно текущие оценки требуемых фазовых координат в промежутках между поступлениями отраженных сигналов формировать на основе тех или иных процедур экстраполяции (прогноза) с малым интервалом дискретизации, а накапливающиеся ошибки корректировать дискретно поступающими измерениями.
Применение классических алгоритмов аналого-дискретной фильтрации [3], показатели точности и устойчивости которых существенно зависят от соответствия условий функционирования положенным в основу их синтеза моделей, не всегда обеспечивает требуемую точность и устойчивость при сопровождении маневрирующей цели. Высокая степень неопределенности пространственных перемещений воздушных объектов приводит либо к снижению точности, либо к срыву сопровождения из-за расхождения процессов фильтрации.
Рациональным выходом из этой ситуации является использование алгоритмов адаптивной аналого-дискретной фильтрации [2], в которых, в зависимости от ситуации, автоматически изменяются либо параметры, либо структура фильтров. При этом наиболее часто используется либо аддитивная коррекция прогноза, либо коррекция коэффициента усиления невязки.
Рассмотрим предлагаемый метод в приложении к двухдиапазонной импульсно-доплеровской РЛС при условии, что
- используется круговой обзор;
- антенны диапазонов имеют одинаковые размеры и направлены в противоположные стороны;
- измерения для каждого диапазона приходят с интервалом 2Т и сдвигом Т относительно друг друга;
- несущие частоты антенн диапазонов различаются в несколько раз;
- этапы идентификации измерений и завязки траекторий уже выполнены известными способами [2];
- выполняется раздельная оценка фазовых координат на основе моделей состояния и измерений для каналов измерения дальности


и скорости сближения соответственно


где Дд и Vд - дальность до цели и скорость ее изменения для дальномерного канала, Vv и аv - скорость сближения с целью и скорость ее изменения для канала измерения скорости,
- признак наличия измерений; Ди и Vи - измерения дальности и скорости сближения, а ξд, ξv - возмущения этих измерений, характеризуемые гауссовским шумом с дисперсиями Дξд и Дξv; τ=T - шаг экстраполяции;
- для адаптации используется вариант с автоматической коррекцией коэффициентов усиления невязки.
В общем случае, алгоритмы адаптивной аналого-дискретной фильтрации позволяют для n-мерного процесса X [2] 
при наличии m-мерных (m≤n) наблюдений Z

сформировать оценки  вектора состояния
вектора состояния







В этих уравнениях: Ф(k,k-1) - динамическая матрица n×n, учитывающая внутренние связи системы; Wx - n-мерный вектор случайных возмущений модели состояния, характеризуемых матрицей Rw дисперсий; H - матрица m×n измерений; Nz - m-мерный вектор случайных погрешностей измерений, характеризуемых матрицей R дисперсий; Qz - признак наличия измерений; K - матрица n×m коэффициентов усиления невязки; Xэ - n-мерный вектор экстраполированных значений вектора состояний; Cу - весовой множитель, используемый при автоматической коррекции коэффициента усиления невязки по результатам fу(ΔZ(k)) ее анализа; P(k) и P(k,k-1) - матрицы апостериорных и априорных дисперсий соответственно.
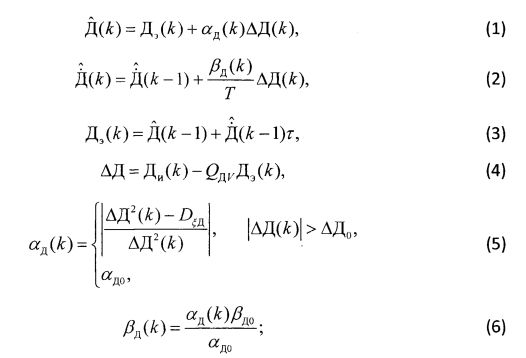
Для предлагаемой системы обработки сигналов был выбран способ адаптивной аналого-дискретной α,β-фильтрации с коррекцией коэффициента усиления невязки, инвариантный к изменению интервала прихода измерений.
С учетом (5)-(13) для (1)-(4) в стационарном режиме были получены следующие соотношения:
- для канала дальности





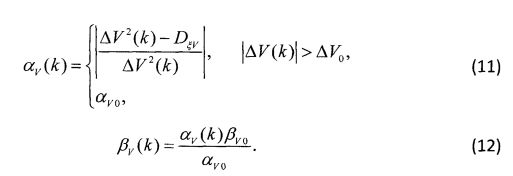
- для канала скорости сближения






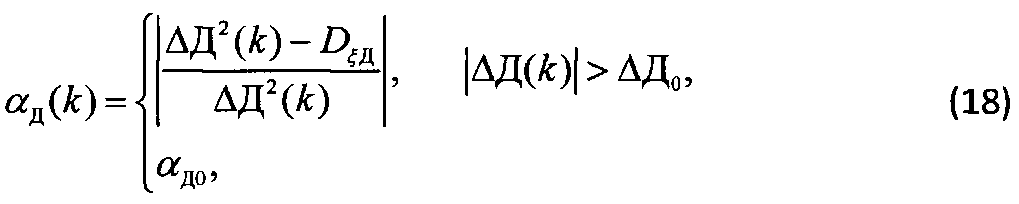
Здесь ΔД и ΔV - невязки измерений Ди дальности и Vи скорости сближения и экстраполированных значений Дэ и Vэ, формируемые с интервалом T по правилу (8), а ΔД0 и ΔV0 - некоторые пороговые значения невязок, при превышении которых включается механизм коррекции коэффициентов усиления по правилам (18), (19) или (24), (25) соответственно, αдо, βдо и αv0, βv0 - некоторые начальные значения коэффициентов усиления невязок.
Отличием от существующих в настоящее время способов фильтрации является использование адаптации (18), (19) и (24), (25) коэффициентов фильтрации в зависимости от значения невязок измерений, а также совместное использование измерений разных диапазонов для коррекции общего прогноза.
Система, реализующая (14)-(19) и (20)-(25), работает следующим образом.
В первоначальный момент времени система инициализируется на основе измерений любого из двух диапазонов. Далее, с малым шагом т потребителям выдаются оценки, экстраполированные по гипотезам (16) (дальность) и (22) (скорость сближения) на основе последнего пришедшего измерения. В дальнейшем, по мере прихода измерений (с интервалом 2Т для каждого канала и сдвигом T времени прихода измерений диапазона 1 относительно диапазона 2), производится расчет невязок (17) и (23) и, при необходимости, коррекция коэффициентов усиления (18), (19) и (24), (25), которые используются для коррекции результатов прогноза.
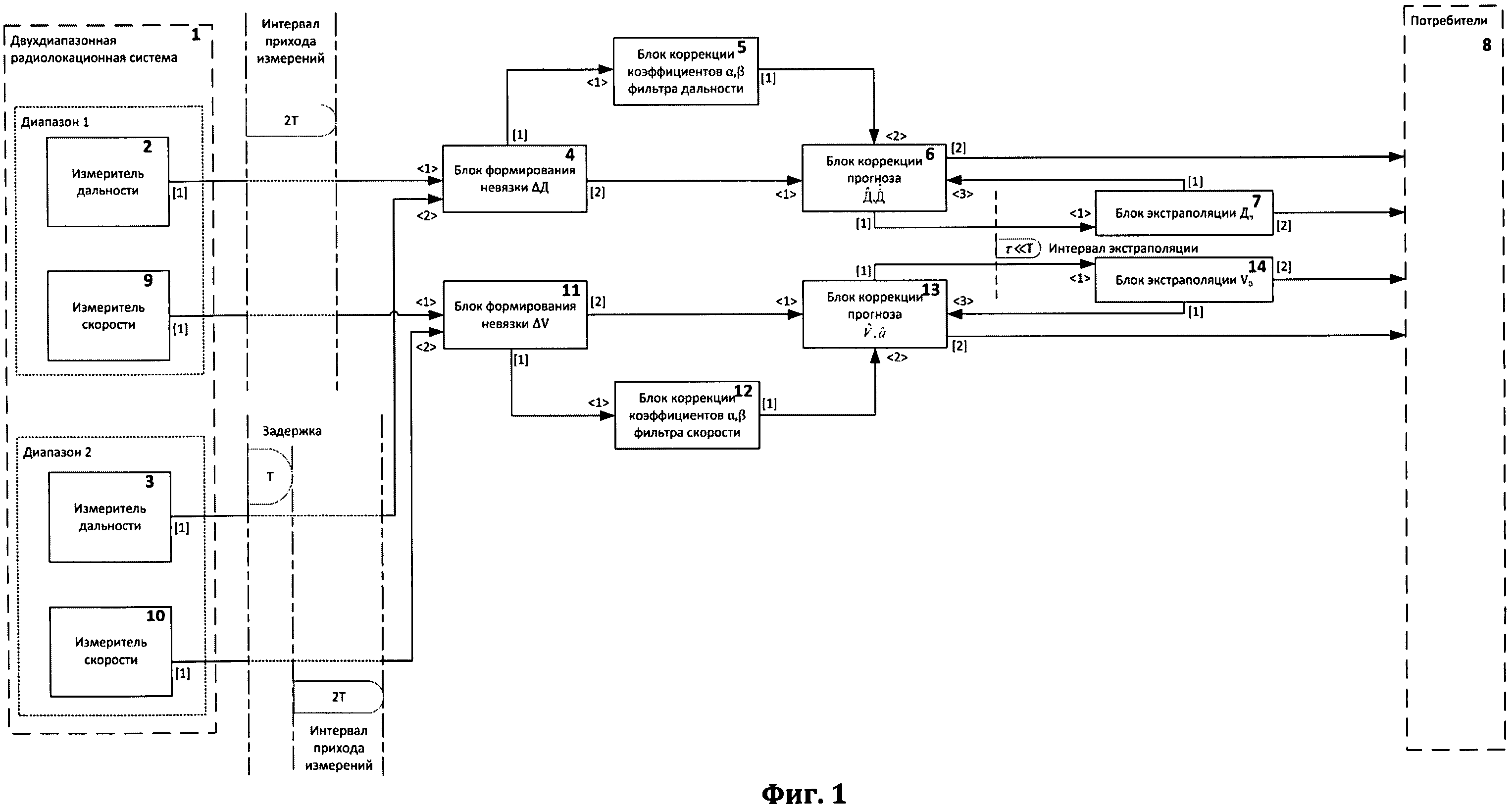
Структурная схема возможного варианта системы, реализующей способ совместной обработки измерений дальности и скорости для двухдиапазонной РЛС с коррекцией коэффициентов усиления, приведена на фиг. 1, на которой входы обозначены цифрами в угловых скобках, а выходы - цифрами в квадратных скобках. В состав системы входят следующие элементы:
- двухдиапазонная радиолокационная система 1;
- измеритель дальности 2 диапазона 1, в котором измерение дальности до цели производится с интервалом 2T;
- измеритель дальности 3 диапазона 2, в котором измерение дальности до цели производится с интервалом 21 со сдвигом T измерений относительно измерений диапазона 1;
- блок 4 формирования невязок ΔД по дальности, в котором по мере поступления измерений от измерителей 1 и 2 с периодом T производится расчет невязки по дальности по формуле (17);
- блок 5 коррекции коэффициентов α,β фильтра дальности, в котором по мере поступления измерений с периодом T производится сравнение невязки с пороговым значением и, при необходимости, пересчет коэффициентов усиления невязки по формулам (18), (19) для соответствующих диапазонов;
- блок 6 коррекции прогноза  ,
,  , в котором с интервалом T производится коррекция прогноза дальности Дэ по формулам (14), (15);
, в котором с интервалом T производится коррекция прогноза дальности Дэ по формулам (14), (15);
- блок 7 экстраполяции дальности Дэ, в котором с интервалом τ<<T производится экстраполяция значений дальности до цели по формуле (16);
- потребители 8 сформированных оценок;
- измеритель скорости 9 диапазона 1, в котором измерение скорости сближения с целью производится с интервалом 2T;
- измеритель скорости 10 диапазона 2, в котором измерение скорости сближения с целью производится с интервалом 2T со сдвигом T измерений относительно измерений диапазона 1;
- блок 11 формирования невязок ΔV по скорости, в котором по мере поступления измерений от измерителей 9 и 10 с периодом T производится расчет невязки по скорости сближения по формуле (23);
- блок 12 коррекции коэффициентов α,β-фильтра скорости, в котором по мере поступления измерений с периодом T производится сравнение невязки с пороговым значением и, при необходимости, пересчет коэффициентов усиления невязки по формулам (24), (25) для соответствующих диапазонов;
- блок 13 коррекции прогноза  ,
,  , в котором с интервалом Т производится коррекция прогноза значений скорости сближения Vэ по формулам (20), (21);
, в котором с интервалом Т производится коррекция прогноза значений скорости сближения Vэ по формулам (20), (21);
- блок 14 экстраполяции скорости Vэ, в котором с интервалом τ<<Т производится экстраполяция значений скорости сближения с целью по формуле (22).
Выход [1] измерителя дальности 2 связан с входом <1> блока 4 формирования невязки ΔД; выход [1] измерителя дальности 3 связан с входом <2> блока 4 формирования невязки ΔД; выход [1] блока 4 формирования невязки ΔД связан с входом <1> блока 5 коррекции коэффициентов α,β фильтра дальности, выход [2] - с входом <1> блока 6 коррекции прогноза  ,
,  ; выход [1] блока 5 коррекции коэффициентов α,β фильтра дальности связан с входом <2> блока 6 коррекции прогноза
; выход [1] блока 5 коррекции коэффициентов α,β фильтра дальности связан с входом <2> блока 6 коррекции прогноза  ,
,  ; выход [1] блока 6 коррекции прогноза
; выход [1] блока 6 коррекции прогноза  ,
,  связан с входом <1> блока 7 экстраполяции Дэ, выход [2] - с потребителями 8; выход [1] блока 7 экстраполяции Дэ связан с входом <3> блока 6 коррекции прогноза
связан с входом <1> блока 7 экстраполяции Дэ, выход [2] - с потребителями 8; выход [1] блока 7 экстраполяции Дэ связан с входом <3> блока 6 коррекции прогноза  ,
,  , выход [2] - с потребителями 8; выход [1] измерителя скорости 9 связан с входом <1> блока 11 формирования невязки ΔV; выход [1] измерителя скорости 10 связан с входом <2> блока 11 формирования невязки ΔV; выход [1] блока 11 формирования невязки ΔV связан с входом <1> блока 12 коррекции коэффициентов α,β фильтра скорости, выход [2] - с входом <1> блока 13 коррекции прогноза
, выход [2] - с потребителями 8; выход [1] измерителя скорости 9 связан с входом <1> блока 11 формирования невязки ΔV; выход [1] измерителя скорости 10 связан с входом <2> блока 11 формирования невязки ΔV; выход [1] блока 11 формирования невязки ΔV связан с входом <1> блока 12 коррекции коэффициентов α,β фильтра скорости, выход [2] - с входом <1> блока 13 коррекции прогноза  ,
,  ; выход [1] блока 12 коррекции коэффициентов α,β фильтра скорости связан с входом <2> блока 13 коррекции прогноза
; выход [1] блока 12 коррекции коэффициентов α,β фильтра скорости связан с входом <2> блока 13 коррекции прогноза  ,
,  ; выход [1] блока 13 коррекции прогноза
; выход [1] блока 13 коррекции прогноза  ,
,  связан с входом <1> блока 14 экстраполяции Vэ, выход [2] - с потребителями 8; выход [1] блока 14 экстраполяции Vэ связан с входом <3> блока 13 коррекции прогноза
связан с входом <1> блока 14 экстраполяции Vэ, выход [2] - с потребителями 8; выход [1] блока 14 экстраполяции Vэ связан с входом <3> блока 13 коррекции прогноза  ,
,  , выход [2] - с потребителями 8.
, выход [2] - с потребителями 8.
Для полученной системы путем имитационного моделирования была проведена оценка эффективности, в качестве показателя которой было взято математическое ожидание погрешности оценивания координат в текущий момент времени.
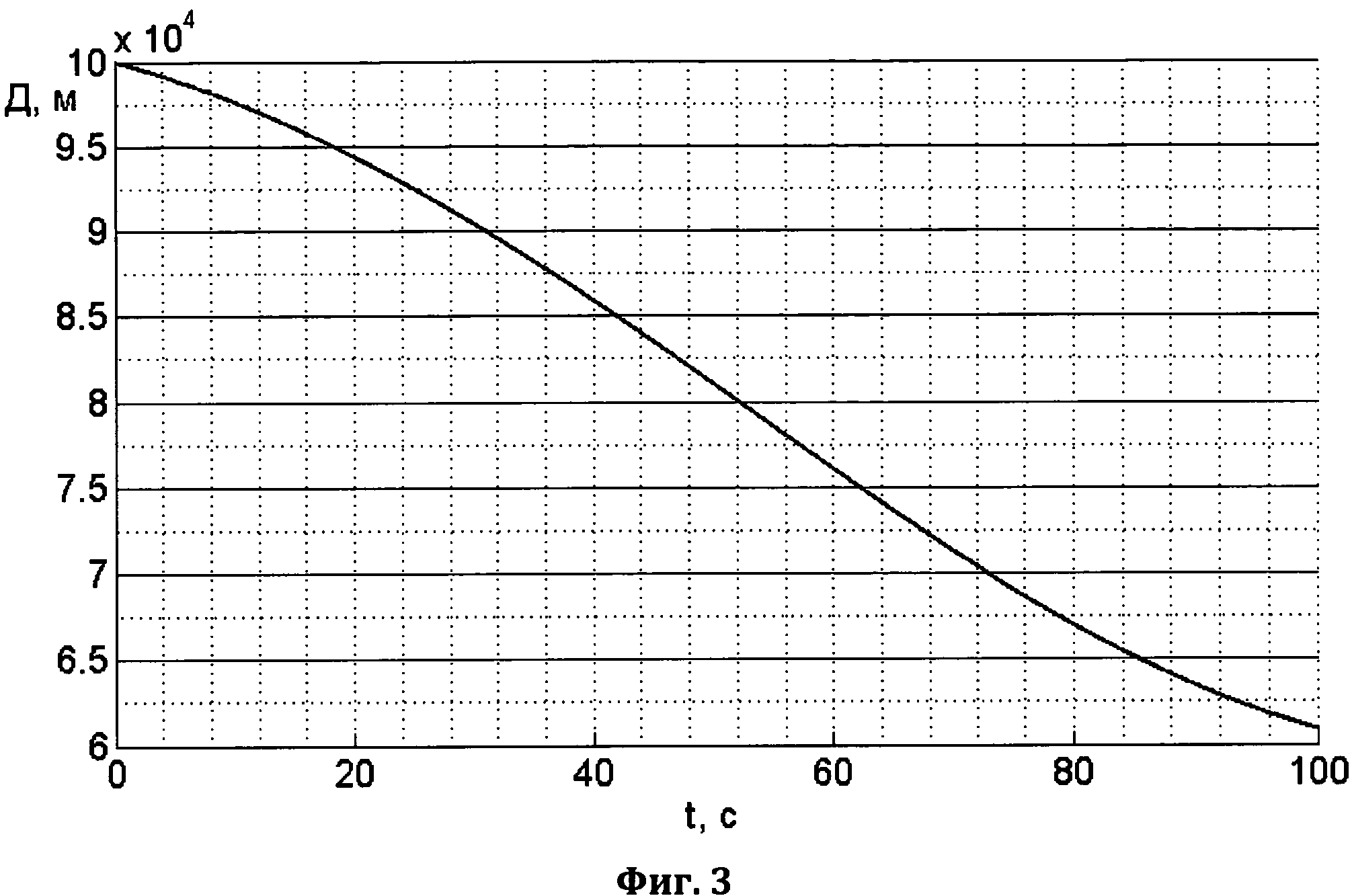
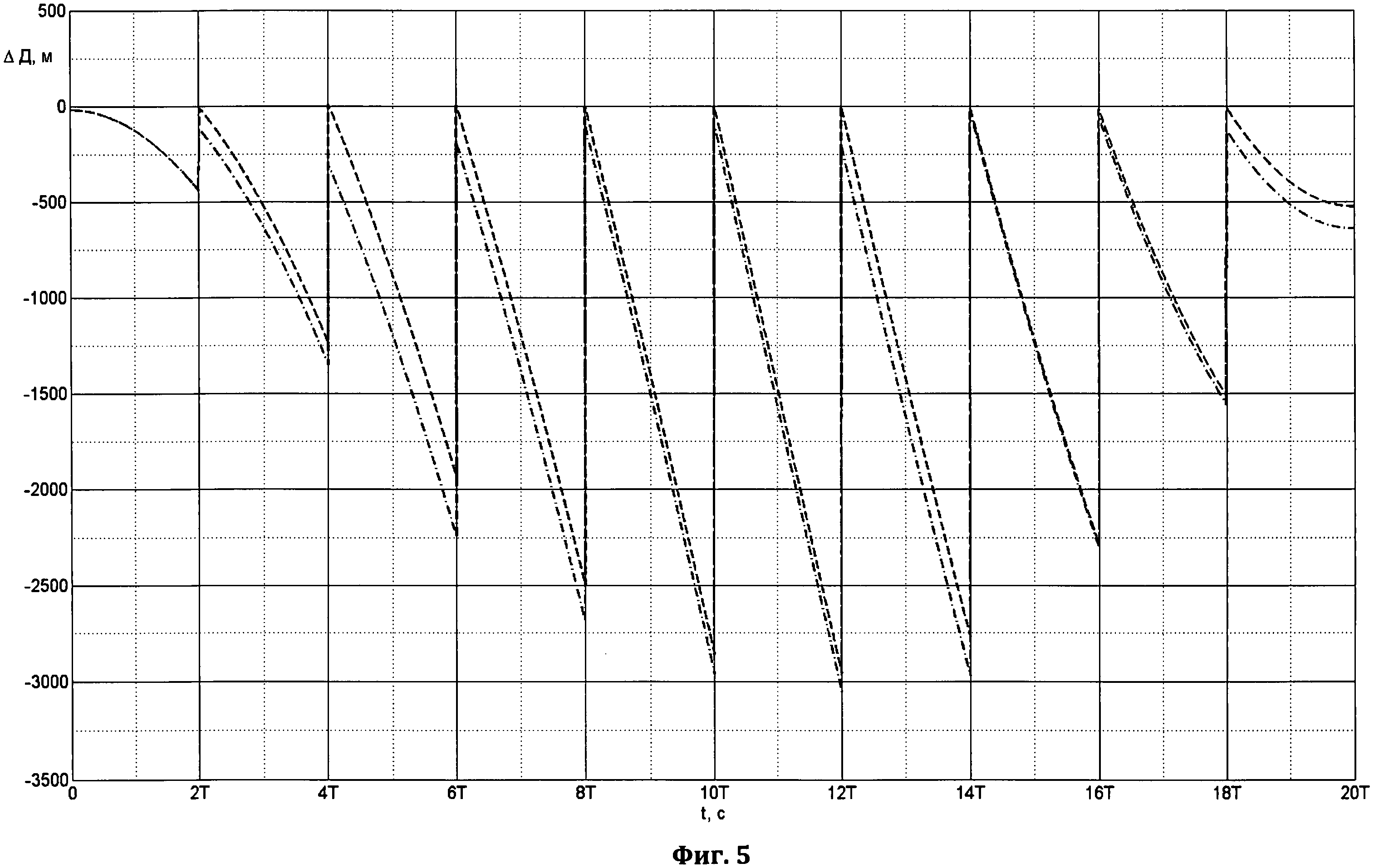
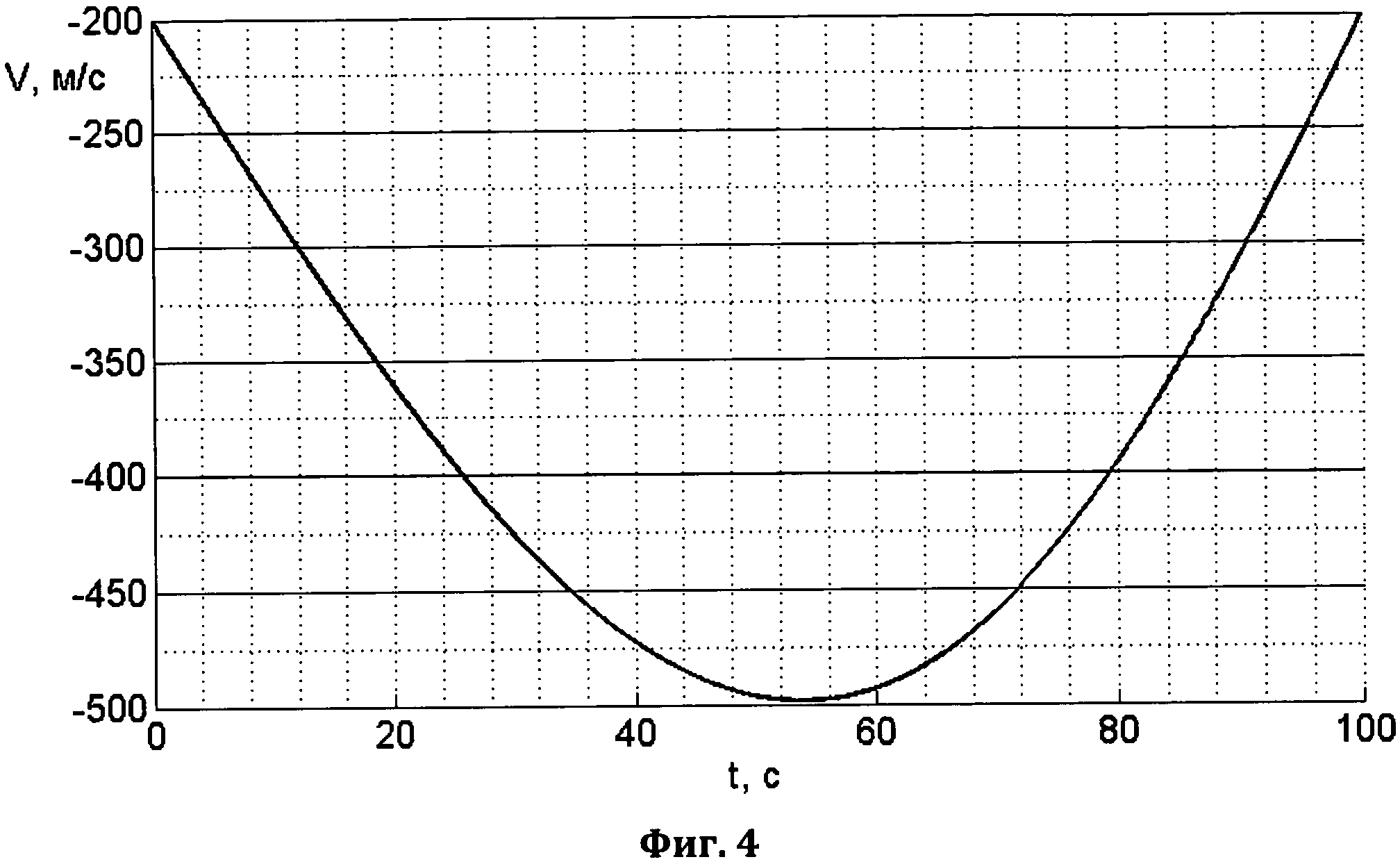
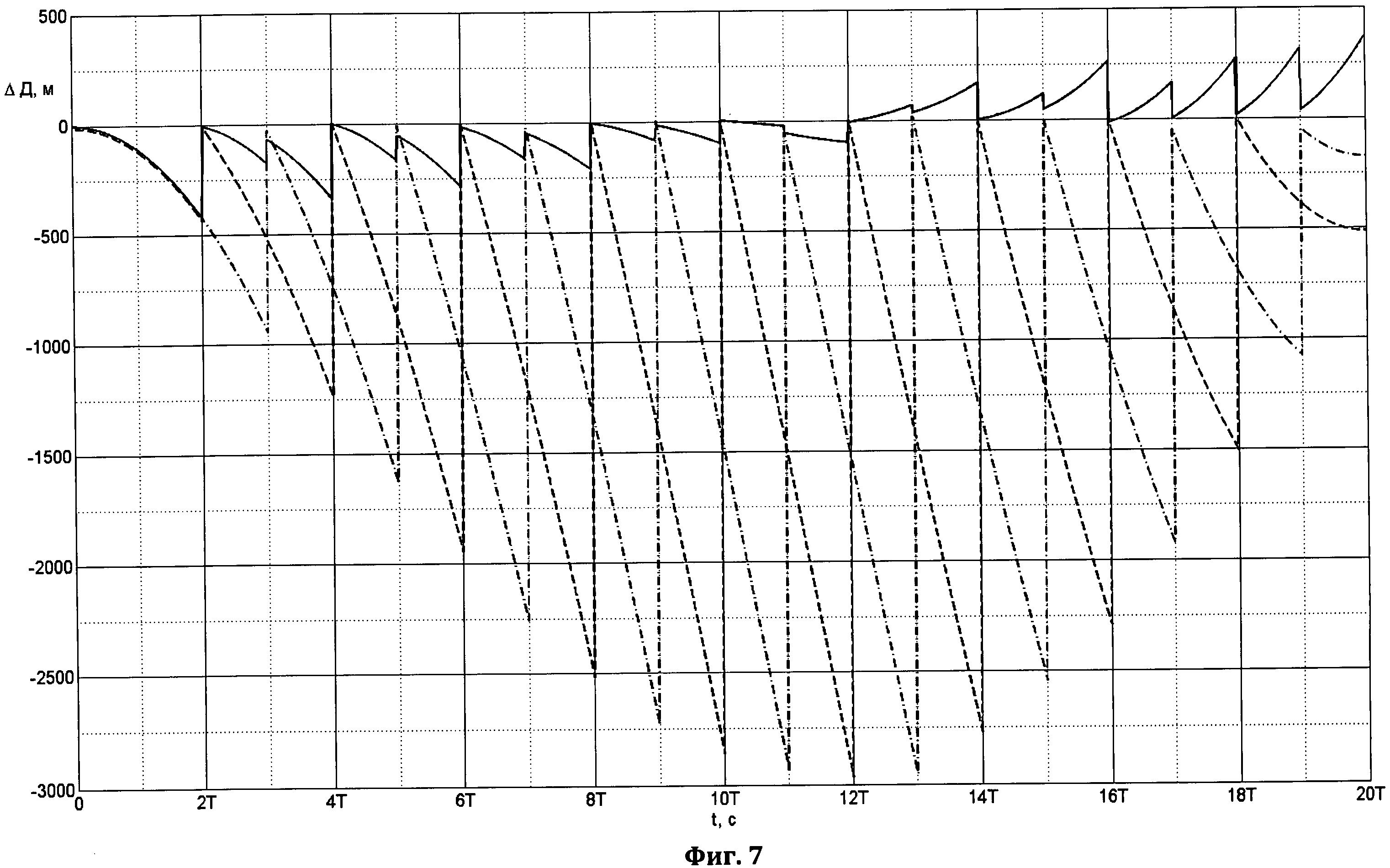
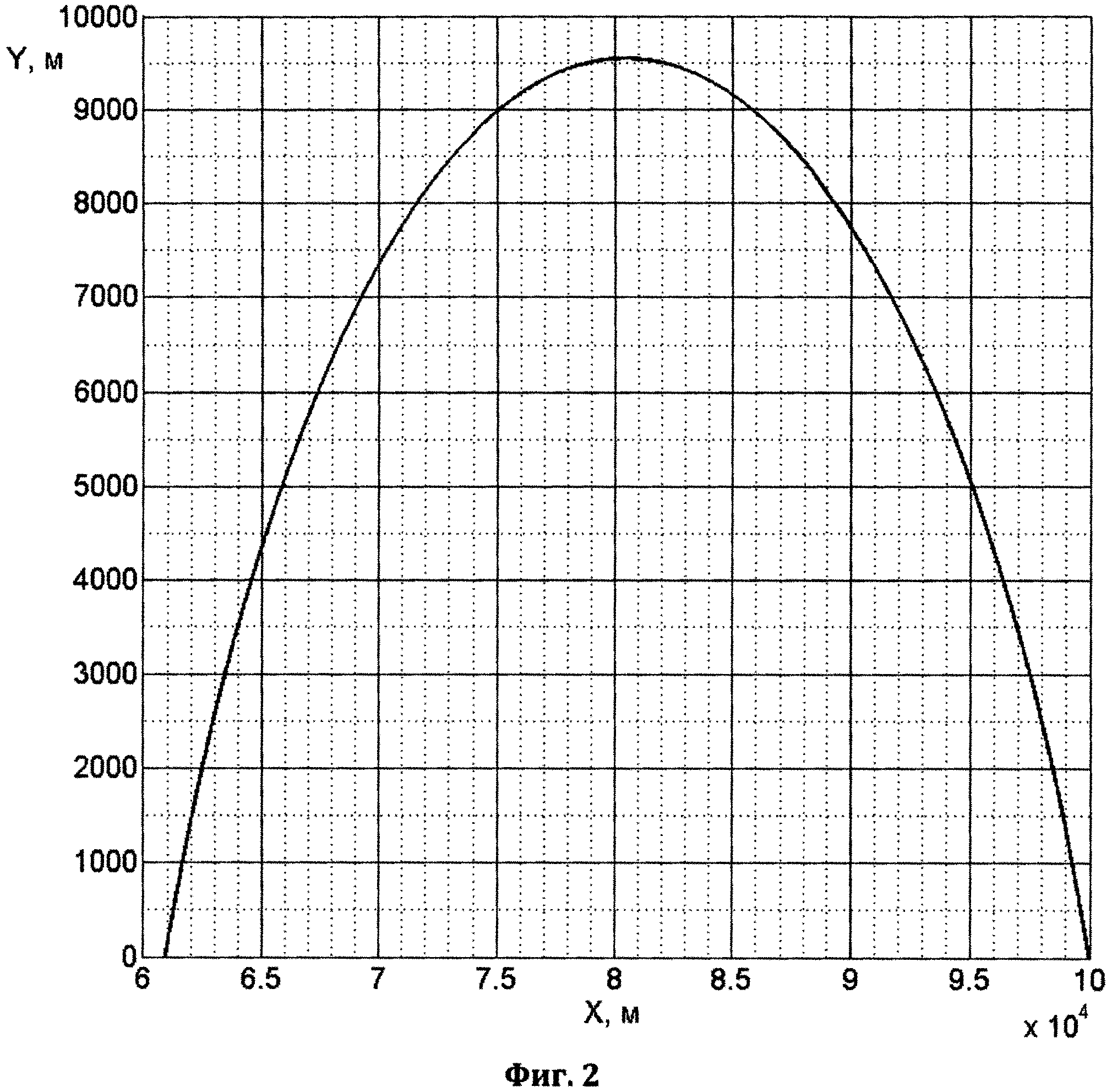
На фиг. 2-7 приведены результаты одного из наборов численных экспериментов, соответствующего следующим начальным условиям: скорость носителя РЛС - 200 м/с, цели - 300 м/с, расстояние между носителем и целью в начальный момент времени - 100 км. Исследовался наихудший вариант с движением цели по криволинейной траектории при разноточных измерениях, среднеквадратичное отклонение (СКО) погрешностей которых для диапазона 2 было в три раза больше СКО для диапазона 1: σ2/σ1=3. На фиг. 2 приведена относительная траектория цели с борта носителя в плоскости XOY, а на фиг. 3 и 4 - дальность до цели и скорость сближения с нею.
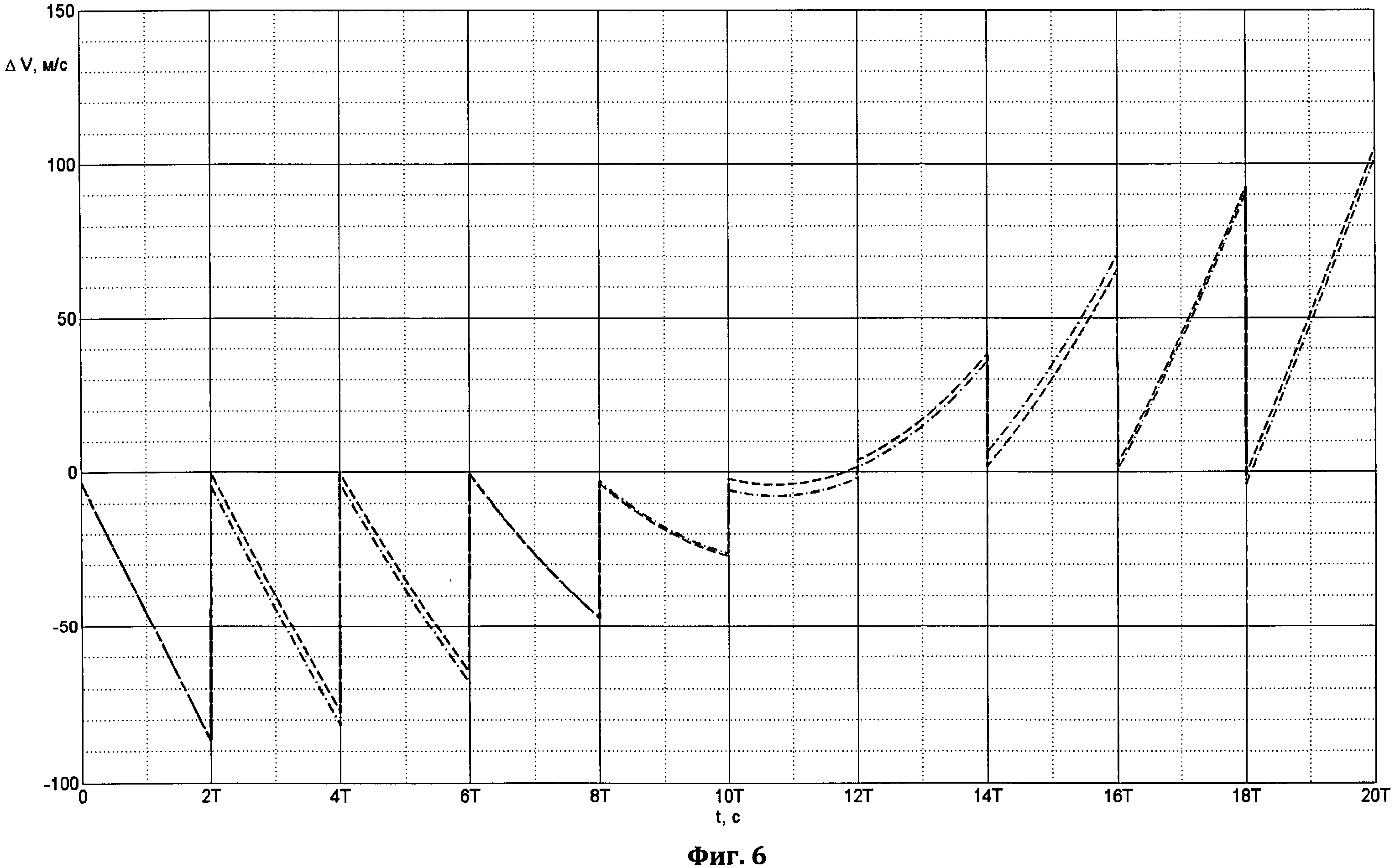
На фиг. 5 приведены графики погрешности оценивания дальности для дальномерного канала, а на фиг. 6 - графики погрешности оценивания скорости сближения для канала измерений скорости при помощи классической α,β-фильтрации [3] отдельно для каналов диапазона 1 (штриховая линия) и 2 (штрихпунктирная линия) при условии, что измерения по каждому из каналов приходят одновременно.
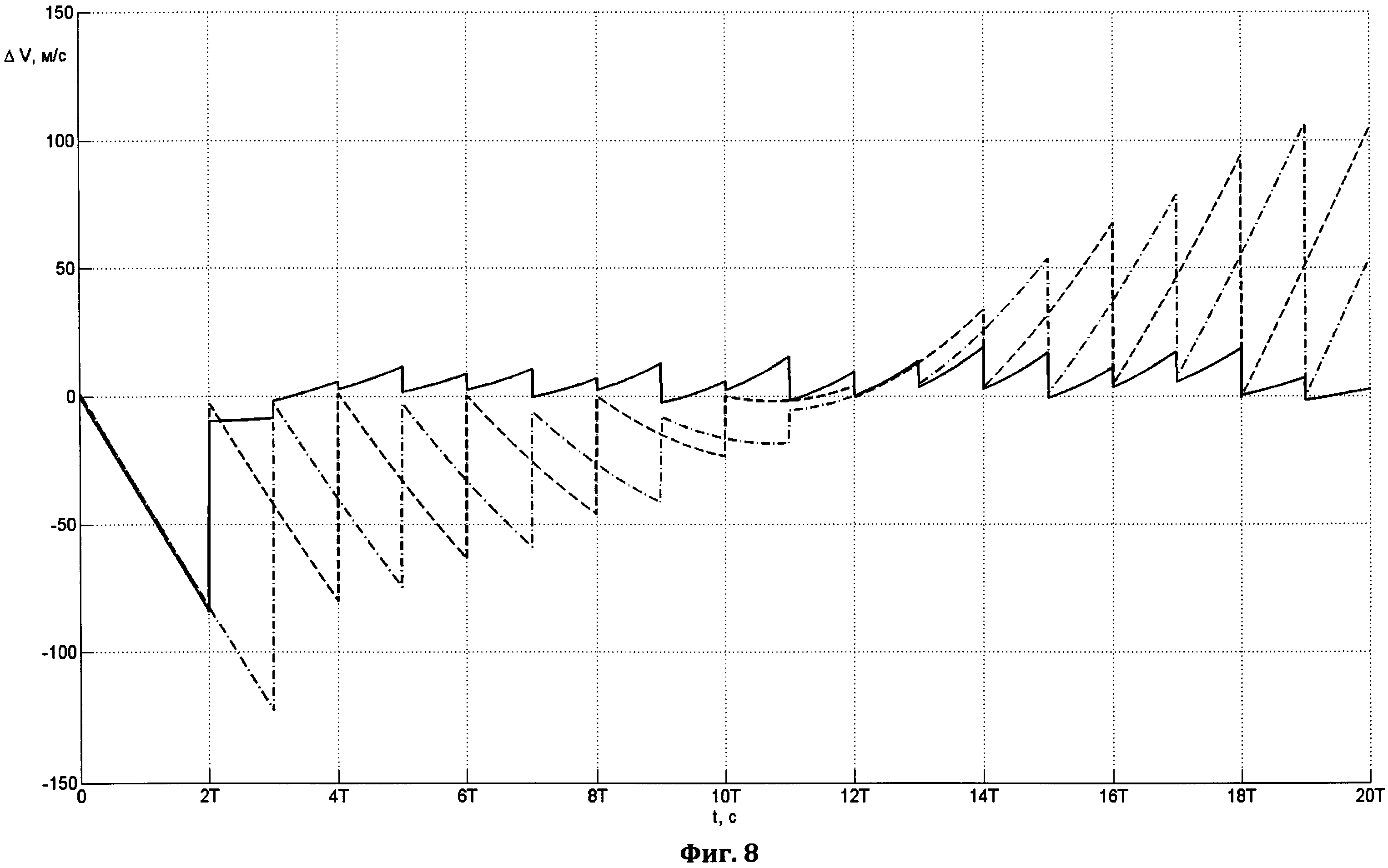
На фиг. 7 представлены графики погрешности оценивания дальности для разных вариантов алгоритмов оценивания: предлагаемого (сплошная линия) при помощи оценок (14)-(16) и при помощи классической α,β-фильтрации отдельно для каналов диапазона 1 (штриховая линия) и 2 (штрихпунктирная линия), при этом для классической α,β-фильтрации измерения приходят с интервалом Т между разными диапазонами. На фиг. 8 представлены результаты моделирования оценивания скорости сближения по формуле (20)-(22).
На основании полученных результатов были сделаны следующие выводы.
1. Предлагаемый алгоритм позволяет существенно (в несколько раз) повысить точность слежения за маневрирующей целью по сравнению с использованием независимой фильтрации с периодом 2Т.
2. За счет более частой коррекции, СКО алгоритма комплексной обработки, характеризующее «однородность» оценивания, несколько меньше (5-10%), чем СКО оценивания любого из каналов в отдельности, даже при неравноточных измерениях.
Технический результат, который может быть получен при осуществлении предлагаемого изобретения, состоит в повышении точности и устойчивости сопровождения целей, в том числе маневрирующих, двухдиапазонными РЛС. Полученная система, инвариантная к изменению времени прихода измерений, может быть использована в двухдиапазонных РЛС на базе антенн с комбинированным электронно-механическим управлением положением луча.
Возможность достижения технического результата достигается путем обеспечения непрерывной выдачи потребителям более точных оценок координат целей по достаточно редким (дискретным) и неодновременно поступающим сигналам двухдиапазонной РЛС, отраженных от маневрирующей цели.
Функциональное назначение представленной на фигуре 1 структурной схемы состоит в преобразовании редко поступающих измерений дальности и скорости сближения с целью от двух антенн существенно более точные оценки дальности и скорости сближения и обеспечении большей устойчивости функционирования системы за счет адаптации к условиям применения и большей частоты формирования оценок.
Литература
[1] Верба В.С., Кондратенков Г.С., Меркулов В.И. Влияние многодиапазонной РЛС на системные показатели авиационного комплекса радиолокационного дозора и наведения. // Радиотехника. - 2011. - №1.
[2] Ярлыков М.С., Богачев А.С., Меркулов В.И., Дрогалин В.В. Радиоэлектронные комплексы навигации, прицеливания и управления вооружением летательных аппаратов. Т. 1. Теоретические основы. / Под ред. М.С. Ярлыкова. - М.: Радиотехника, 2012. - 504 с.
[3] Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. - М.: Радио и связь, 1991.








Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных воздушных объектов
Способ траекторного управления беспилотным летательным аппаратом для облета рельефа местности в вертикальной плоскости
Датчик температуры электронного модуля
Устройство для очистки и химической металлизации отверстий заготовок печатных плат
Способ и система идентификации измерений в многодиапазонных рлс
Автоматизированная система контроля территорий и управления силами и средствами охраны
Робототехнический комплекс разминирования
Устройство защиты радиоэлектронной аппаратуры при воздействии на неё импульсного ионизирующего излучения
Способ аутентификации электронного изображения (варианты)
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных летательных аппаратов с повышенной адаптацией к маневру носителя и система для его реализации
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных воздушных объектов
Способ траекторного управления беспилотным летательным аппаратом для облета рельефа местности в вертикальной плоскости
Датчик температуры электронного модуля
Устройство для очистки и химической металлизации отверстий заготовок печатных плат
Способ и система идентификации измерений в многодиапазонных рлс
Автоматизированная система контроля территорий и управления силами и средствами охраны
Робототехнический комплекс разминирования
Способ арифметического кодирования с шифрованием
Устройство защиты радиоэлектронной аппаратуры при воздействии на неё импульсного ионизирующего излучения
Способ аутентификации электронного изображения (варианты)

