Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННОЙ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ
Вид РИД
Изобретение
Изобретение относится к области приборостроения, а именно к области автоматического регулирования, и может быть использовано в системах высокоточного управления движением центра масс подвижных объектов, в частности аэробаллистических летательных аппаратов.
Известен способ управления движением воздушных объектов, осуществленный в известном устройстве тренажера оператора локационных станций [авторское свидетельство СССР №991479, G09B 9/00, опубл. 23.01.1983 г.], включающий предполетную подготовку и последующее формирование программной траектории движения ЛА по опорным точкам с дальнейшим осуществлением в процессе полета восстановления траектории движения ЛА плавным переходом между ними. В ходе предполетной подготовки в данном способе вводят начальные полярные координаты объекта в виде пеленга, дальности, курса и начальной скорости. Формирование траектории движения представлено в виде отрезка прямой, исходящей из начальной точки в направлении курса. Сигнал к началу маневра (поворота) поступает синхронно с вводом нового курса движения и скорости объекта к моменту выхода на новый курс. В результате выполняется имитация поворота путем сопряжения двух прямолинейных разнонаправленных участков движения дугой окружности, радиус которой определяется скоростью изменения курса, которая также задается в момент начала маневра.
Недостатком данного способа является нереальная имитация траектории движения с учетом кинематики маневра воздушного объекта. Имитируемая кривая является плоскостной кривой, все точки которой расположены на некоторой условно заданной высоте над поверхностью земли, что не характерно для реальных полетов воздушных объектов в трехмерном пространстве. Кроме того, данный способ трудоемок и требует большого объема оперативной памяти при введении соответственно большого количества данных в бортовое вычислительное устройство (БВУ).
Известен способ управления движением воздушного объекта, описанный в изобретении под названием «Способ имитации траекторий движения воздушных объектов» [патент РФ №2419072, G01C 21/00, опубл. 20.05.2011 г.], включающий предполетную подготовку и последующее формирование программной траектории движения ЛА по опорным точкам с дальнейшим осуществлением в процессе полета восстановления траектории движения ЛА плавным переходом между опорными точками.
Данный способ по сравнению с вышеприведенным аналогом расширяет функциональные возможности устройства имитации траекторий движения воздушных объектов с расчетом на формирование наиболее реалистичной трассы полета в трехмерном воздушном пространстве без скачков скорости и ускорения, а также более эффективного функционально-диагностического контроля аппаратуры локационных станций. Траекторию движения в данном способе представляют состоящей из разнонаправленных отрезков прямолинейного движения и переходных кривых. Каждая из кривых состоит из двух ветвей кубической параболы, сопряженных между собой дугой окружности или совмещенных непосредственно. Начальными условиями полета являются начальные полярные координаты объекта в виде пеленга, дальности, курса и начальной скорости объекта. Задание траектории осуществляют путем ввода координат узловых точек опорной ломаной линии, очерчивающей траекторию движения воздушного объекта. На начальном участке переходной кривой траектория сопряжения отрезков прямых воспроизводится сегментом кубической параболы с радиусом кривизны, обеспечивающим плавный (без скачков скорости и ускорения) переход с прямолинейного участка на начало второго участка с минимальным радиусом кривизны.
Данный способ принимается за прототип как наиболее близкий по технической сущности к заявляемому.
Однако недостатком данного способа является то, что восстановленная таким способом траектория может и не пройти непосредственно через узловые точки, обогнув их, что отрицательно скажется на точности движения объекта по заданной криволинейной пространственной траектории. Кроме того, известный способ весьма трудоемкий при использовании его в бортовой навигационно-измерительной системе ЛА. Наличие большого количества вычислений, которые осуществляются на каждом шаге коррекции управления (на каждом отрезке траектории в виде ломаной линии и переходных кривых между отрезками), требует длительного времени для вычислений и соответственно большого объема оперативной и постоянной памяти и, как следствие, увеличивает необходимый вес и габариты бортового вычислительного устройства (БВУ). А как известно, для ЛА с жестко ограниченными габаритно-массовыми характеристиками существуют жесткие ограничения на вес и объем БВУ. Кроме того, при подготовке полетного задания процесс передачи данных на борт ЛА в БВУ займет также много времени.
Технический результат, на достижение которого направлено изобретение, заключается в повышении статической и динамической точности системы управления траекторией движения аэробаллистического летательного аппарата по заданной программной траектории при уменьшении рабочего объема памяти для хранения заданной программной траектории в БВУ ЛА.
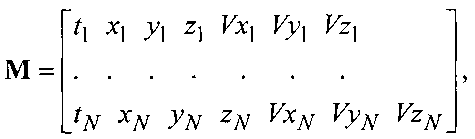
Указанный технический результат достигается тем, что в способе управления движением аэробаллистического летательного аппарата (ЛА) по заданной пространственной траектории, включающем предполетную подготовку и последующее формирование заданной траектории движения ЛА по опорным точкам с дальнейшим осуществлением в процессе полета восстановления траектории движения ЛА плавным переходом между опорными точками, согласно изобретению в ходе предполетной подготовки из всего массива опорных точек сформированной программной траектории производят выбор нескольких узловых точек, параметры которых до начала движения вводят в память бортового вычислительного устройства ЛА в форме матрицы М, при этом после начала движения участки заданной траектории между узловыми точками аппроксимируют с помощью кубического сплайна Эрмита, а управление движением ЛА осуществляют при помощи метода пропорционального сближения, пользуясь матрицей М, представленной следующим образом:
где 1…N - общее количество узловых точек; t1…N - время полета текущей узловой точки; х1…N, y1…N, z1…N - координаты текущей узловой точки в нормальной земной системе координат; Vx1…N, Vy1…N, Vz1…N - проекции скорости текущей узловой точки, причем выбор точки наведения, лежащей на заданной программной траектории, проводят с учетом выполнения следующих двух условий согласно соотношениям Dm>Rmin и tm>t+Δt, где m - точка наведения; Dm - значение модуля радиуса-вектора центра масс ЛА относительно m-й точки; Rmin - заранее заданное минимально допустимое значение отклонения ЛА от программной траектории; t - период времени от начала полета до m-й точки программной траектории; tm - значение времени нахождения m-й точки на программной траектории; Δt - заранее заданное допустимое значение отставания по времени.
Выбор в ходе предполетной подготовки из всего массива опорных точек сформированной программной траектории нескольких узловых точек, параметры которых до начала движения вводят в память бортового вычислительного устройства ЛА в форме матрицы М, при этом после начала движения участки заданной траектории между узловыми точками аппроксимируют с помощью кубического сплайна Эрмита, а управление движением ЛА осуществляют при помощи метода пропорционального сближения, пользуясь матрицей М, причем выбор точки наведения, лежащей на заданной траектории, проводят с учетом выполнения следующих двух условий согласно соотношениям Dm>Rmin и tm>t+Δt, где m - точка наведения; Dm - значение модуля радиуса-вектора центра масс ЛА относительно m-й точки; Rmin - заранее заданное минимально допустимое значение отклонения ЛА от программной траектории; t - период времени от начала полета до m-й точки программной траектории; tm - значение времени нахождения m-й точки на программной траектории; Δt - заранее заданное допустимое значение отставания по времени, позволяет обеспечить безаварийное движение ЛА по заданной пространственной траектории, исключив вероятность срыва с заданной программной траектории за счет использования метода пропорционального сближения при управлении, траекторным движением ЛА. Одновременно с этим использование матрицы М для введения параметров узловых точек в память БВУ и аппроксимация программной траектории позволяет уменьшить объем памяти для хранения заданной программной траектории в БВУ. Таким образом, все вышеизложенное дает возможность повысить статическую и динамическую точность системы управления траекторией движения аэробаллистического летательного аппарата по заданной программной траектории при уменьшении рабочего объема памяти для хранения заданной программной траектории в БВУ ЛА.
Для снижения величины необходимого времени при передаче данных в БВУ в ходе предполетной подготовки формирование заданной траектории движения ЛА осуществляют согласно расчетам, произведенным по математической модели ЛА по отобранным опорным точкам программной траектории. Условием отбора каждой из них служит наличие в точке смены знака любого из параметров угла наклона траектории ЛА, угла пути ЛА и их производных по времени с отрицательного на положительное значение и наоборот.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Отличительные признаки (выбор в ходе предполетной подготовки из всего массива опорных точек сформированной программной траектории производят нескольких узловых точек, параметры которых до начала движения вводят в память бортового вычислительного устройства ЛА в форме матрицы М, при этом после начала движения участки заданной траектории между узловыми точками аппроксимируют с помощью кубического сплайна Эрмита, а управление движением ЛА осуществляют при помощи метода пропорционального сближения, пользуясь матрицей М, представленной следующим образом:
где 1…N - общее количество узловых точек; t1…N - время полета текущей узловой точки; х1…N, y1…N, z1…N - координаты текущей узловой точки в нормальной земной системе координат; Vx1…N, Vy1…N, Vz1…N - проекции скорости текущей узловой точки, причем выбор точки наведения, лежащей на заданной программной траектории, проводят с учетом выполнения следующих двух условий согласно соотношениям Dm>Rmin и tm>t+Δt, где m - точка наведения; Dm - значение модуля радиуса-вектора центра масс ЛА относительно m-й точки; Rmin - заранее заданное минимально допустимое значение отклонения ЛА от программной траектории; t - период времени от начала полета до m-й точки программной траектории; tm - значение времени нахождения m-й точки на программной траектории; Δt - заранее заданное допустимое значение отставания по времени) не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение поясняется чертежами:
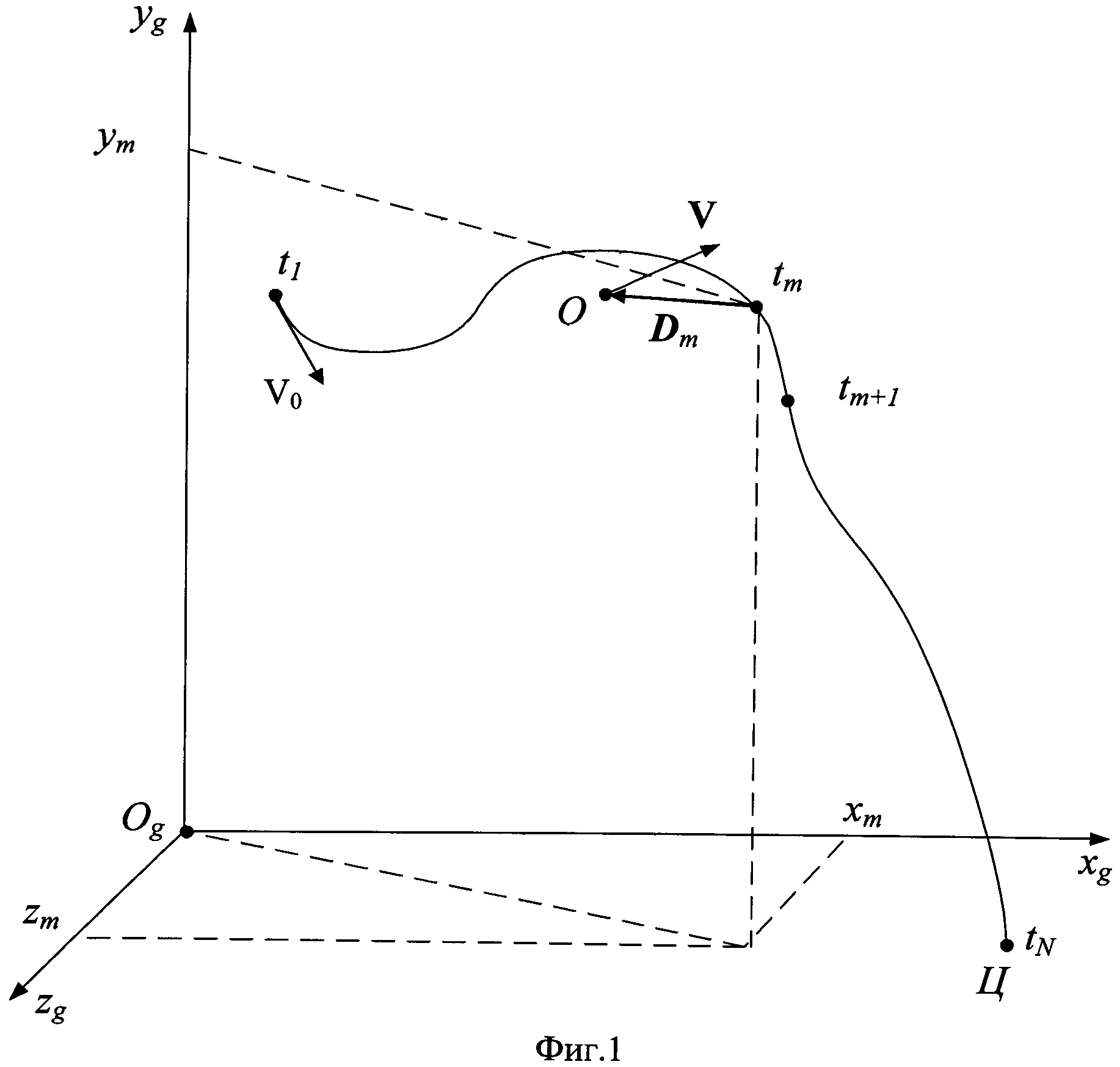
- на фиг. 1 показана заданная программная траектория;
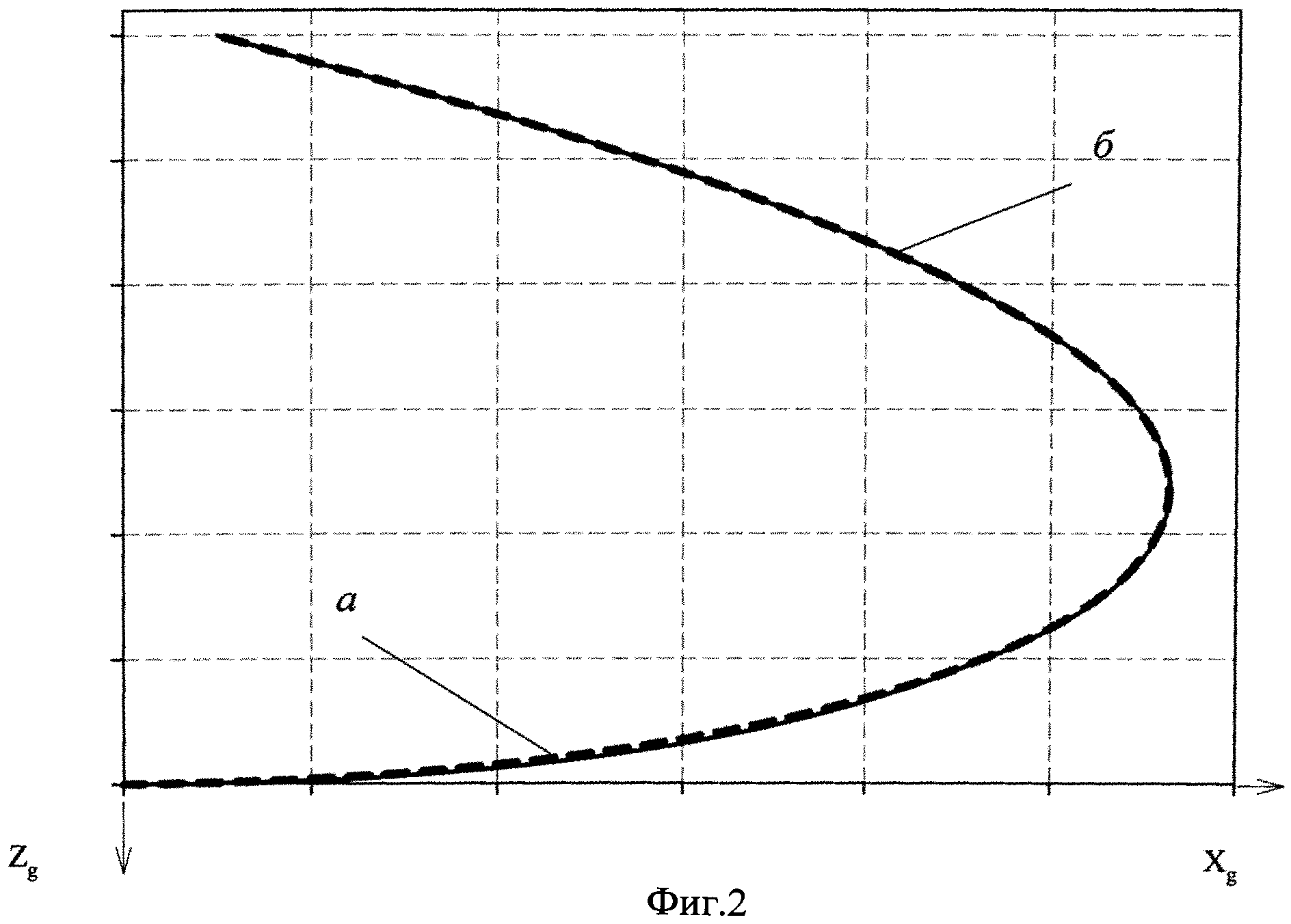
- на фиг. 2 показаны траектории движения ЛА, осуществленных при прочих равных условиях, где кривая а (пунктирная линия) - заданная программная траектория движения; кривая б (сплошная линия) - траектория, реализуемая по предлагаемому способу.
Способ осуществляется следующим образом.
В ходе предполетной подготовки по имеющейся математической модели летательного аппарата, начальных условий и ограничений рассчитывают программную траекторию полета ЛА с определенным временным шагом. Шаг расчета определяют исходя из требовании к точности вычислений, а также временем, отведенным на предполетную подготовку. В ходе расчета определяют параметры программной траектории, среди которых находят: tПТ - время полета ЛА по программной траектории; X, Y, Z - координаты ЛА в выбранной системе координат; Vx, Vy, Vz - компоненты вектора скорости ЛА в выбранной системе координат; Θ - угол наклона траектории ЛА; ψ - угол пути ЛА;  - производная по времени угла наклона траектории ЛА;
- производная по времени угла наклона траектории ЛА;  - производная по времени угла пути ЛА. Одновременно с расчетом производят отбор опорных точек на основании оценки параметров Θ, ψ,
,
- производная по времени угла пути ЛА. Одновременно с расчетом производят отбор опорных точек на основании оценки параметров Θ, ψ,
,  . Для каждой точки программной траектории определяют знак у четырех перечисленных выше параметров. Условием отбора каждой из опорных точек служит наличие в ней смены знака любого из параметров угла наклона траектории ЛА, угла пути ЛА и их производных по времени с отрицательного на положительное значение и наоборот. Наряду с этим отбирают параметры первой и конечной точки (Ц) программной траектории. Далее из всего массива точек сформированной программной траектории производят выбор нескольких узловых точек, параметры которых до начала движения вводят в память БВУ. Узловые точки программной траектории вводят в виде параметров tm и соответствующих ему параметров x, y, z и Vx, Vy, Vz, представленных в форме матрицы М следующего вида:
. Для каждой точки программной траектории определяют знак у четырех перечисленных выше параметров. Условием отбора каждой из опорных точек служит наличие в ней смены знака любого из параметров угла наклона траектории ЛА, угла пути ЛА и их производных по времени с отрицательного на положительное значение и наоборот. Наряду с этим отбирают параметры первой и конечной точки (Ц) программной траектории. Далее из всего массива точек сформированной программной траектории производят выбор нескольких узловых точек, параметры которых до начала движения вводят в память БВУ. Узловые точки программной траектории вводят в виде параметров tm и соответствующих ему параметров x, y, z и Vx, Vy, Vz, представленных в форме матрицы М следующего вида:
где 1…N - общее количество узловых точек; t1…N - время полета текущей узловой точки; х1…N, y1…N, z1…N - координаты текущей узловой точки в нормальной земной системе координат; Vx1…N, Vy1…N, Vz1…N - проекции скорости текущей узловой точки. На этом этапе предполетная подготовка завершена. Точка наведения в данном способе - это некоторая точка, лежащая на заданной программной траектории, которая «движется» по заданной траектории, проходящей через точку местоположения действительной цели (Ц) (фиг. 2). ЛА наводится на действительную цель методом пропорционального сближения, начиная с момента пуска и заканчивая попаданием в точку Ц. В качестве координат точки наведения используют координаты, содержащиеся в матрице М. Отслеживание движения ЛА по заданной траектории осуществляют тем, что в каждый рассматриваемый текущий момент времени точку наведения помещают в одну из точек программной траектории, «притягивают» ЛА к точке наведения и контролируют с приемлемой точностью уход центра масс ЛА от заданной траектории за счет постоянного отслеживания положения точки наведения, достигая уменьшения методической ошибки управления и исключения «срыва» ЛА с программной траектории. При этом после начала движения ЛА участки заданной траектории между узловыми точками аппроксимируют с помощью кубического сплайна Эрмита [Методы сплайн-функций. / Ю.С. Завьялов, Б.И. Квасов, В.Л. Мирошниченко. М.: Наука. Главная редакция физико-математической литературы, 1980]. На фиг. 2 показана заданная программная траектория (ПТ), где О - центр масс ЛА; Og - центр нормальной земной стартовой системы координат (НЗСК);Og Xg Yg Zg - нормальная земная система координат (здесь НЗСК - правая декартова система координат, зафиксированная относительно Земли. Начало Og этой системы координат расположено в проекции на поверхность Земли центра масс ЛА в начальный момент времени t0. Ось Og Yg направлена вверх по местной вертикали к поверхности Земли, оси Og Xg и Og Zg лежат в горизонтальной плоскости. Ось Og Xg направлена по вектору путевой скорости ЛА в начальный момент времени. Направление оси Og Zg выбрано таким образом, чтобы система координат Og Xg Yg Zg была правой), V0 - вектор земной скорости ЛА в начальный момент времени t1; V- вектор земной скорости ЛА в текущий момент времени t; m - порядковый номер узловой точки ПТ; N - общее количество узловых точек ПТ; Dm - радиус-вектор центра масс ЛА относительно m-точки ПТ (вектор относительной дальности) в текущий момент времени t; tm - время полета ЛА по ПТ; xm, ym, zm - координаты точки наведения в момент времени tm.
Управление движением ЛА осуществляют при помощи метода пропорционального сближения, пользуясь вышеприведенной матрицей М, т.е в качестве координат точки наведения используют координаты, содержащиеся в матрице М. Отслеживание движения ЛА по заданной траектории осуществляют тем, что в каждый рассматриваемый текущий момент времени t точку наведения помещают в одну из точек программной траектории. Для устойчивого отслеживания ЛА программной траектории и исключения аварийных ситуаций выбор этой точки происходит с учетом проверки двух условий. Во-первых, осуществляют сравнение относительной дальности ЛА до текущей точки программной траектории с минимально допустимым расстоянием, т.е модуль вектора Dm должен быть больше минимально допустимого расстояния до точки наведения (Rmin), т.е Dm>Rmin. При этом величина Rmin в общем случае может быть как постоянной, так и меняться во времени в зависимости от динамики ЛА, характера траектории и требований к качеству, с которым необходимо провести отслеживание программной траектории. Во-вторых, осуществляют сравнение программного времени текущей точки с текущим временем полета, т.е. текущее время полета ЛА t должно быть меньше времени полета ЛА по ПТ (tm) c учетом заданного отставания по времени Δt, т.е tm>t+Δt. При этом величину отставания по времени Δt определяют как Δt=Rmin/V0. Далее в случае невыполнения в m-й точке хотя бы одного из этих двух условий корректирующий сигнал управления перестраивают с m-й точки на ближайшую по траектории полета ЛА (m+1)-ю точку наведением на нее вектора скорости ЛА, где эти условия выполняются, осуществляя тем самым наведение на цель и обеспечивая высокоточное движение ЛА по заданной программной траектории с минимальным отклонением от нее.
Таким образом, данный способ управления движением аэробаллистического летательного аппарата по заданной криволинейной пространственной траектории позволяет контролировать с приемлемой точностью уход центра масс ЛА от заданной траектории за счет постоянного отслеживания положения точки наведения, достигая уменьшения методической ошибки управления и исключения «срыва» с программной траектории, тем самым повышая статическую и динамическую точность управления движением летательного аппарата по заданной криволинейной пространственной траектории при уменьшении рабочего объема памяти для хранения заданной программной траектории в БВУ ЛА и величины необходимого времени при передаче данных в БВУ в ходе предполетной подготовки.
На фиг. 2 показаны траектории полета летательного аппарата, сформированные по данным расчетов и результатам математического моделирования, где кривая а - это заданная программная траектория движения, кривая б - траектория, реализуемая по предлагаемому способу. Начальным условием для расчета данных траекторий было принято следующее: для имитации неконтролируемых возмущений при расчетах начальная скорость заданной программной траектории была ниже на 7%, чем начальные скорости для предлагаемого способа. Фиг. 2 наглядно демонстрирует и доказывает высокую точность перемещения ЛА по заданной криволинейной траектории.
Таким образом, представленные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- повышение статической и динамической точности системы управления траекторией движения аэробаллистического летательного аппарата по заданной программной траектории при уменьшении рабочего объема памяти для хранения заданной программной траектории в БВУ ЛА;
- уменьшение величины необходимого времени при передаче данных в БВУ в ходе предполетной подготовки;
- данный способ предназначен для использования в приборостроении и может быть использован в системах высокоточного управления движением центра масс подвижных объектов;
- для заявляемого способа в том виде, в котором он охарактеризован в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов.
Следовательно, заявляемое изобретение соответствует условию «промышленная применимость».
Взрывозащитная камера
Способ проверки качества функционирования стенда для определения массо-центровочных и массо-инерционных характеристик твердого тела вращения
Виброчастотный микромеханический акселерометр
Устройство для определения чувствительности энергетического материала к трению ударного характера
Коллектор с рекуперацией энергии свч прибора
Способ получения и обработки изображений, сформированных с помощью протонного излучения
Способ получения пористого изделия из урана
Устройство уничтожения кристалла микросхемы памяти
Способ измерения энергии сверхширокополосного электромагнитного излучения
Способ экспериментального определения динамического коэффициента внешнего трения
Способ определения показателей однородности дисперсного материала спектральным методом и способ определения масштабных границ однородности дисперсного материала спектральным методом

