Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТАЦИИ НАВИГАЦИОННОГО СПУТНИКА
Вид РИД
Изобретение
Изобретение относится к области космической техники и может быть использовано в навигационных космических аппаратах для уменьшения погрешности прогнозирования движения центра масс навигационного спутника и погрешности знания положения фазового центра антенны при прохождении особых точек орбиты.
Известен способ ориентации навигационного спутника, включающий ориентацию электрической оси антенны, параллельную первой оси спутника, на Землю и ориентацию панелей солнечных батарей на Солнце разворотом спутника вместе с панелями солнечных батарей (БС) относительно первой оси спутника до совмещения нормали к панелям солнечных батарей с плоскостью «Солнце-спутник-Земля» и разворот панелей солнечных батарей вокруг второй оси, перпендикулярной первой, до совмещения нормали к панелям солнечных батарей с направлением на Солнце [Основы проектирования космических аппаратов информационного обеспечения: учеб. пособие / Чеботарев В.Е., Косенко В.Е; Сиб. гос. аэрокосмич. ун-т. - Красноярск, 2011, с. 275-282].
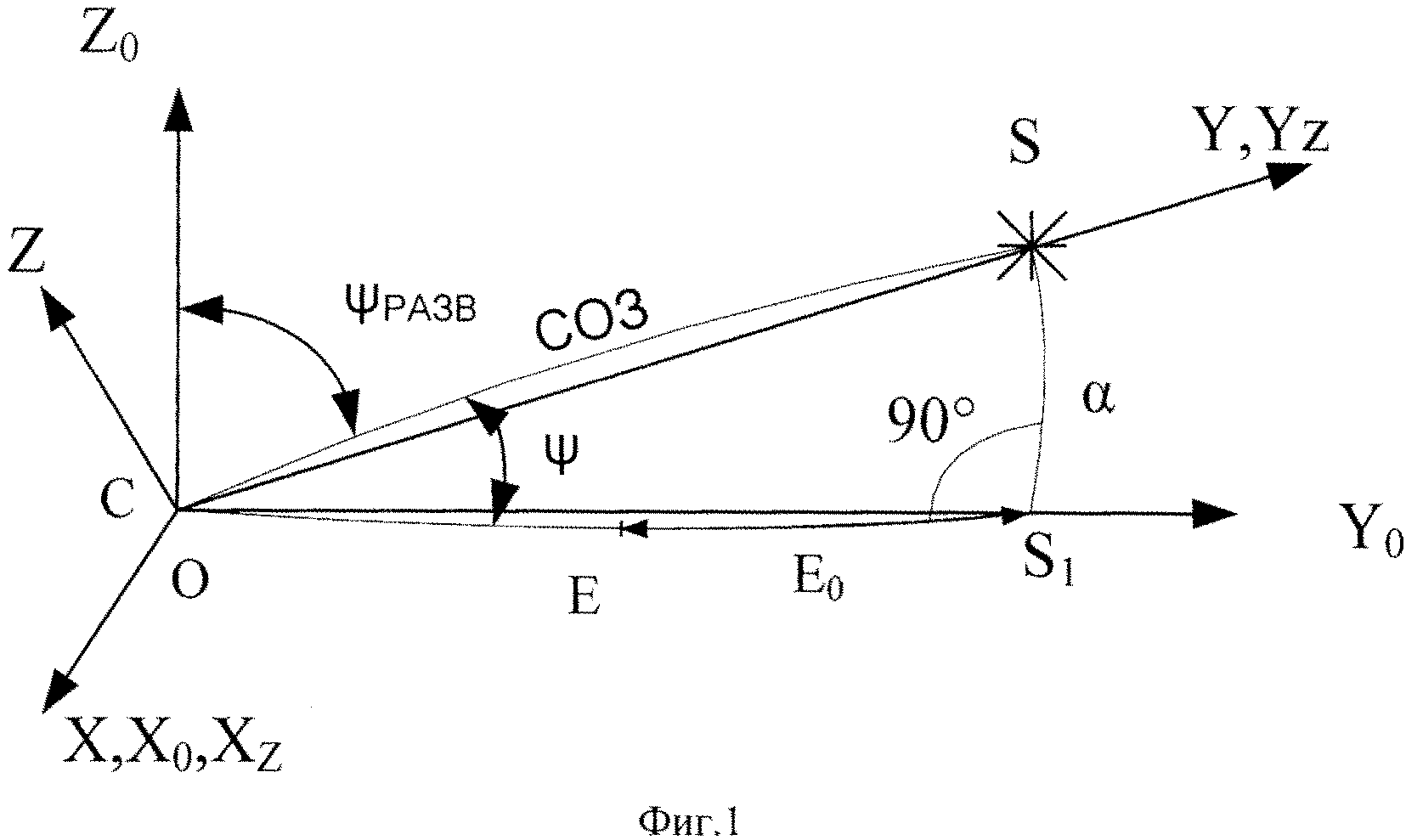
При ориентации спутника нормали к панелям солнечной батареи должны быть ориентированы в плоскости Солнце-спутник (Объект) - Земля (СОЗ). Скорость вращения плоскости СОЗ (wсоз) определяется по формуле (1) с помощью фиг. 1.
На фиг. 1 обозначено: СОЗ - угол Солнце-спутник-Земля; α - угол между плоскостью орбиты и направлением на Солнце; Е - угол от текущего положения спутника на орбите до точки орбиты, в которой угол СОЗ минимален (максимален); Е0 - угол от точки по орбите, в которой включается упреждающий разворот до точки, в которой угол СОЗ максимален (минимален); Ψ - угол рыскания (текущий угол между осью OY0 и проекцией направления на Солнце на плоскость OZ0Y0); ψРАЗВ - угол разворота вокруг оси ОХ в процессе движения по орбите от текущего положения спутника до точки прохождения максимального (минимального) угла СОЗ; OXOYOZO - правая орбитальная система координат (ОХO - направлена по текущему радиусу-вектору изделия от Земли, OZO - направлена по нормали к плоскости орбиты); OXZYZZZ - правая солнечно-земная система координат (OXZ - совпадает с ОХO, OYZ - лежит в плоскости XOOXS); OXYZ - связанная со спутником система координат (ОХ - первая ось спутника, OY - третья ось спутника, OZ - вторая ось спутника).

где w0 - орбитальная угловая скорость.
При прохождении теневых участков от Земли угол СОЗ принимает минимальное значение. При прохождении участков орбиты, на которых спутник находится между Землей и Солнцем, угол СОЗ принимает максимальное значение. Из сферического треугольника CSS1 на фиг. 1 имеем:

дифференцируя (2) и полагая, что  и
и  , получим:
, получим:

Из сферического треугольника CSS1 на фиг. 1 имеем:


Подставляя (5) в (3) получим формулу (1).
Из формулы (1) следует, что при угле α между плоскостью орбиты и направлением на Солнце близком к нулю, скорость вращения плоскости СОЗ близка к нулю. Однако в точке Е=0 скорость вращения плоскости СОЗ стремится к бесконечности.
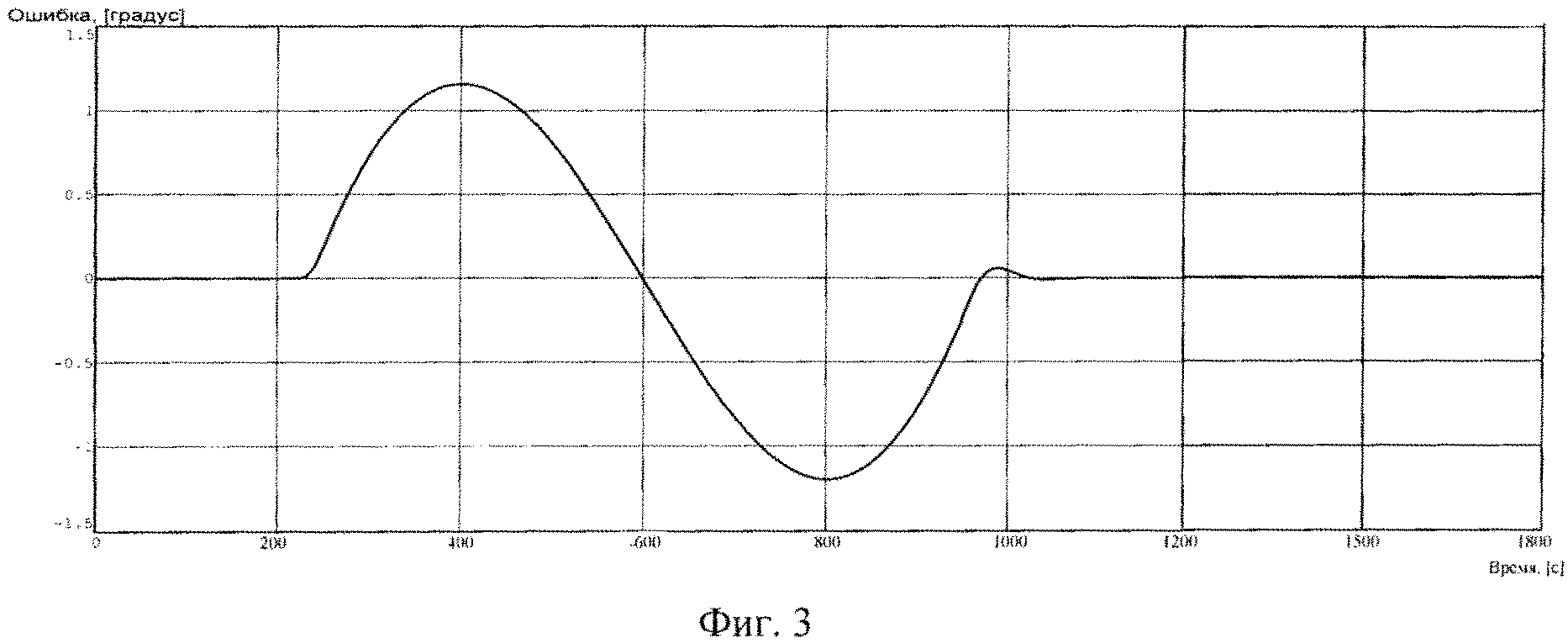
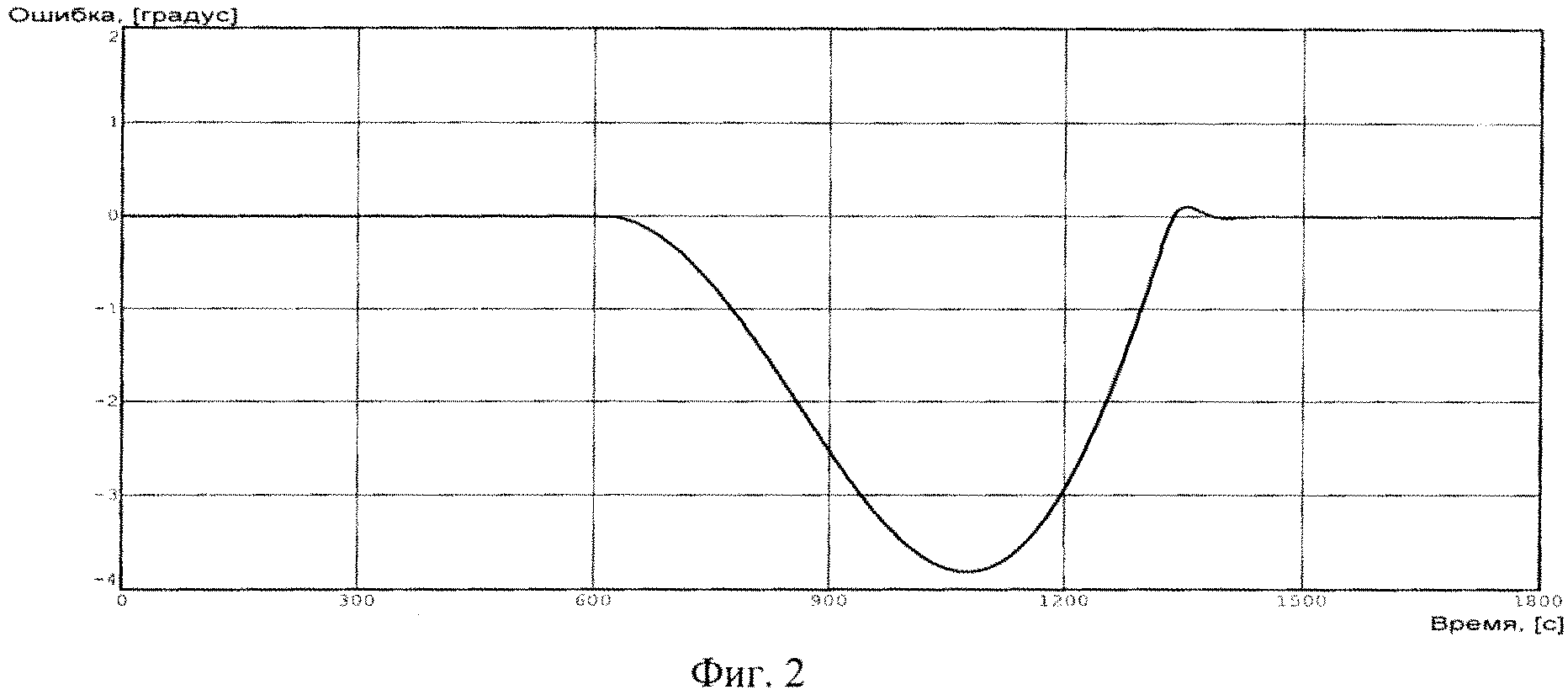
Таким образом, отслеживание плоскости СОЗ при прохождении малых (близких к 0°) и больших (близких к 180°) углов СОЗ с использованием исполнительных органов системы ориентации без ошибки невозможно. На фиг. 2, 3 показаны процессы отслеживания плоскостью XOY плоскости СОЗ без упреждения и с упреждением при угле α=0.
Из рассмотрения фиг. 2, 3 видно, что без упреждения ошибка ориентации панелей на Солнце получается существенно больше, чем с упреждением.
Необходимо отметить также следующее. В связи с тем, что спутник навигационный, ошибка ориентации панелей БС на Солнце приводит к непрогнозируемым силам от солнечного давления, которые влияют на движение центра масс космического аппарата (КА).
Погрешность ориентации панелей БС на Солнце при развороте спутника возникает в плоскости XOZ, так как привод солнечной батареи не может устранить ошибку в этой плоскости (одностепенной привод солнечной батареи устраняет ошибку ориентации только в плоскости XOY).
Проекции сил солнечного давления на ось OY0 орбитальной системы координат, совпадающей с вектором линейной скорости спутника, при симметричном упреждающем развороте относительно точки максимального угла СОЗ компенсируются. Проекции сил от солнечного давления на ось OZ0 орбитальной системы координат, совпадающей с нормалью к плоскости орбиты, складываются.
Влияние сил от солнечного давления, направленных по вектору линейной скорости спутника на движение центра масс спутника на порядок больше, чем от сил, направленных от оси OZ0 (по нормали к орбите). Поэтому при симметричном упреждающем развороте осуществляется минимизация влияния упреждающего разворота на движение центра масс КА.
Таким образом, можно утверждать следующее:
1. Движение при прохождении особых точек орбиты с использованием упреждающего разворота прогнозируемое, так как представляет собой программный разворот.
2. Упреждающий разворот должен быть симметричным относительно точки максимального (минимального) угла СОЗ, при этом минимизируется влияние упреждающего разворота на движение центра масс КА.
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является способ ориентации навигационного спутника, включающий ориентацию электрической оси антенны, параллельную первой оси спутника, на Землю и ориентацию панелей солнечных батарей на Солнце разворотом спутника вместе с панелями солнечных батарей относительно первой оси спутника до совмещения нормали к панелям солнечных батарей с плоскостью «Солнце-спутник-Земля» и разворот панелей солнечных батарей вокруг второй оси вращения, перпендикулярной первой, до совмещения нормали к панелям солнечных батарей с направлением на Солнце, в заданных интервалах орбиты, охватывающих интервалы неопределенности ориентации спутника на теневых орбитах, где осуществляются независимые упреждающие развороты вокруг первой и второй оси спутника на расчетную величину с промежуточным удержанием заданной ориентации [Заявка №2012152127 от 04.12.2112 г. Способ ориентации навигационного спутника]. Описанный способ принят за прототип изобретения.
Недостатки прототипа:
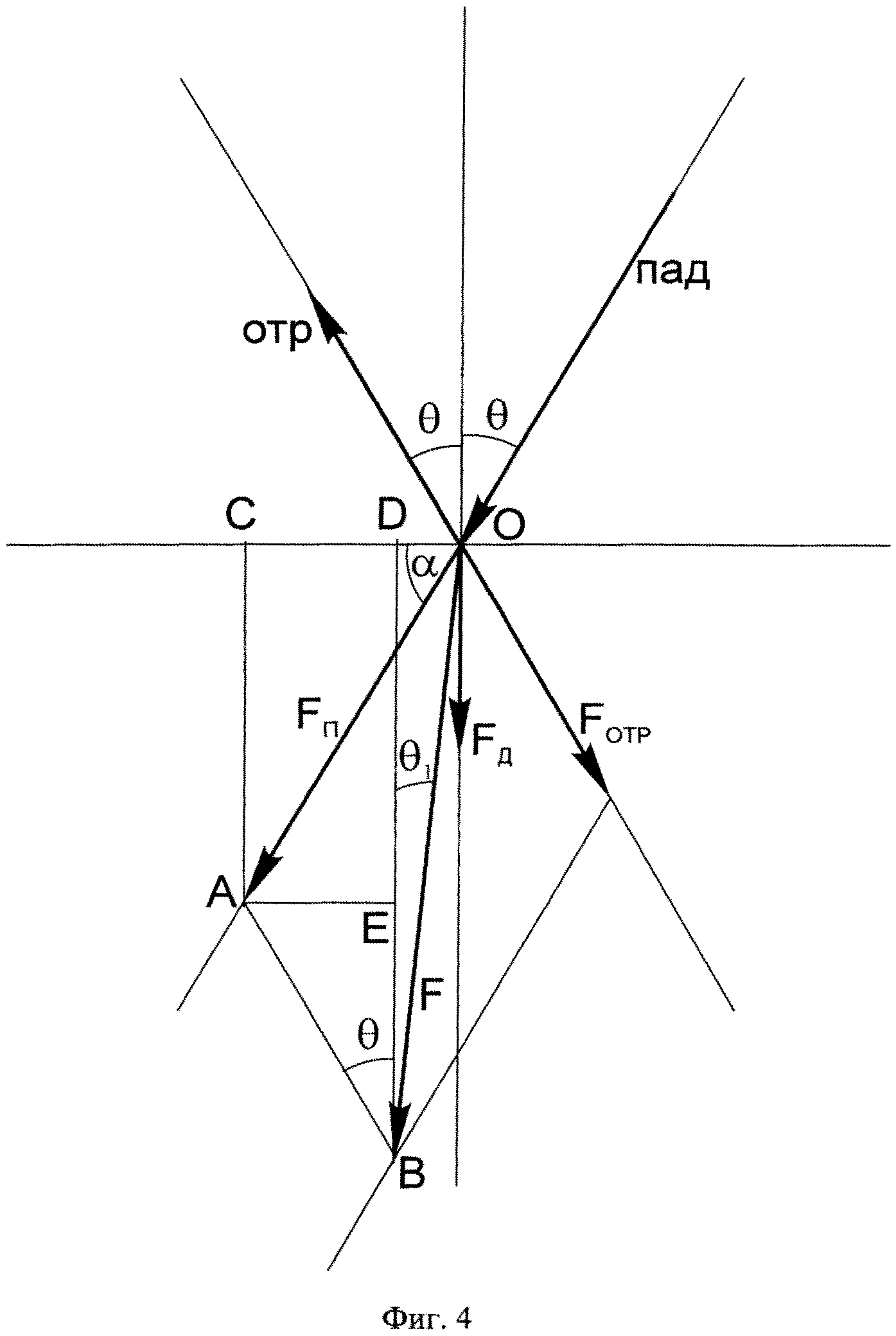
Определим величину силы от солнечного давления, действующую на плоскость панели ВС с использованием фиг. 4, на которой обозначено:
FП - сила давления от падающего потока;
FОТР - сила давления зеркально-отраженного потока;
FД - сила давления от диффузно-отраженного потока;
θ - угол между нормалью к панели и направлением светового потока.
Сила солнечного давления (FСД) определяется:

Величина силы F, равная сумме сил от падающего потока и зеркально отраженного потока, равна:

где S - площадь панелей солнечных батарей; h0 - удельная величина солнечного давления (h0=4,63·10-6 H/м2); CS - коэффициент зеркального отражения (отношение величины энергии, заключенной в единице объема зеркально-отраженного потока к величине энергии в единице объема падающего потока);
Угол θ1 между нормалью к панели и силой F1 определяется по формуле:

Величина силы FД от диффузно-отраженного потока определяется:

где CD - коэффициент диффузного отражения (отношение величины энергии, заключенной в единице объема диффузно-отраженного потока к величине энергии в единице объема падающего потока).
При штатной ориентации угол θ практически равен нулю. При θ=0 имеем:

Формируя упреждающий разворот панели БС по второй оси на угол θ получаем, что при прохождении одних и тех же участков орбиты будем иметь различные значения величины силы, действующей на КА, и угла действия силы относительно штатной ориентации. Таким образом, движение центра масс КА будет осуществляться под действием других сил от солнечного давления по сравнению со штатным режимом, что приводит к погрешности прогнозирования движения центра масс КА. Мгновенной адаптации прогнозирования движения центра масс КА под действием измененных сил от солнечного давления не произойдет.
При этом для прогнозирования движения центра масс необходимо точное знание коэффициентов зеркального CS и диффузного отражения CD. Коэффициенты CS и CD зависят от времени пребывания спутника в космосе и не могут быть измерены. Даже если будут созданы алгоритмы оперативного прогнозирования движения центра масс, необходимо знание точных текущих значений коэффициентов CS и CD.
Таким образом, кажущаяся простота уменьшения погрешности прогнозирования движения центра масс спутника при прохождении углов Солнце-спутник-Земля, близких к 180° (большие углы СОЗ), путем формирования упреждающего разворота панели солнечных батарей вокруг второй оси, приводит к смещению величины номинальной силы от солнечного давления на неизвестную величину, за счет чего будет получаться большая погрешность прогнозирования движения центра масс спутника. Таким образом, целесообразно прохождение больших углов СОЗ осуществлять путем упреждающего программного разворота вокруг первой оси на участке орбиты, симметричном относительно точки максимального угла СОЗ. При этом погрешность прогнозирования движения центра масс навигационного спутника будет минимальной.
В основу настоящего изобретения положена задача создания способа ориентации космического аппарата при прохождении особых точек орбиты, позволяющего уменьшить погрешность прогнозирования движения центра масс навигационного спутника и погрешность знания положения фазового центра антенны.
Поставленная задача решается следующим образом.
Заявлен способ ориентации навигационного спутника, включающий ориентацию электрической оси антенны, параллельно первой оси спутника, на Землю и ориентацию панелей солнечных батарей на Солнце разворотом спутника вместе с панелями солнечных батарей относительно первой оси спутника до совмещения нормали к панелям солнечных батарей с плоскостью «Солнце-спутник-Земля» и разворот панелей солнечных батарей вокруг второй оси спутника, перпендикулярной первой, до совмещения нормали к панелям солнечной батареи с направлением на Солнце, отличающийся тем, что при прохождении особых участков орбиты, включающих теневые участки орбиты и участки больших углов Солнце-спутник-Земля (больше 175°), организуется прогнозируемое движение спутника путем проведения упреждающих программных разворотов относительно первой оси спутника на участках орбиты, симметричных относительно точек максимального и минимального угла Солнце-спутник-Земля.
Сущность изобретения
Последовательность операций при прохождении больших (малых) углов СОЗ.
При прохождении больших (малых) углов СОЗ при модуле угла между плоскостью орбиты и направлением на Солнце меньше заданного значения (2°) и угле между осью ОХ и направлением на Солнце меньше заданного значения (5°) на каждом цикле управления выполняются следующие действия:
1) определяется угол Е в плоскости орбиты между текущим положением КА и положением КА в момент прохождения максимального (минимального) угла СОЗ;
2) определяется угол разворота ψРАЗВ относительно оси ОХ в процессе движения по орбите от текущего положения КА до точки прохождения максимального (минимального) угла СОЗ, в которой ось OY должна быть перпендикулярна плоскости орбиты;
3) определяется время T1 разворота по оси ОХ на указанный выше угол при заданной скорости разворота вокруг оси ОХ;
4) определяется время Т2 прохождения по орбите угла от текущего положения до точки прохождения максимального (минимального) угла СОЗ.
Как только время T1, необходимое для разворота вокруг оси ОХ на вычисленный угол разворота, становится больше времени Т2 прохождения по орбите угла от текущего положения КА до точки прохождения максимального (минимального) угла СОЗ, формируется признак на упреждающий программный разворот КА вокруг оси ОХ.
Скорость разворота и угол разворота при упреждающем развороте контролируются по информации с блока измерения скоростей (БИС). Выключение упреждающего программного разворота осуществляется через время 2T1, и ориентация осуществляется по алгоритму режима ориентации на Землю (РОЗ).
При такой последовательности операций упреждающий программный разворот формируется на участке орбиты, симметричном относительно точки орбиты, в которой угол Солнце-спутник-Земля максимален (минимален). Если формировать упреждающий программный разворот при условии Т2>T1, то упреждающий программный разворот будет формироваться на участке орбиты несимметричном относительно точки орбиты, в которой угол Солнце-спутник-Земля максимален (минимален). Следовательно, увеличится погрешность прогнозирования движения центра масс.
С целью уменьшения погрешности фактической ориентации относительно эталонной по каналу рыскания во время упреждающего программного разворота в программном обеспечении (ПО) КА предусмотрены следующие операции:
1) производится расчет угла разворота и угловой скорости разворота с использованием эталонной модели, в которой управляющие моменты и моменты инерции КА относительно оси ОХ номинальные;
2) одновременно производится расчет фактического угла и угловой скорости по информации с БИС при управлении с использованием номинального значения управляющего кода (момента), подаваемого на двигатель-маховик;
3) находятся разности между фактическим и эталонным значением угла и между фактическим и эталонным значением угловой скорости, и по этим разностям формируется поправка к управляющему моменту относительно оси ОХ;
4) осуществляется отслеживание эталонной угловой скорости и эталонного угла разворота с использованием поправки к номинальному значению управляющего момента.
Если фазовый центр навигационной антенны не совмещен с центром масс КА, то при проведении упреждающих разворотов как при прохождении больших, так и малых углов СОЗ, будет возникать погрешность в определении положения центра масс КА. Эта погрешность обусловлена тем, что аппаратура потребителя измеряет положение фазового центра навигационной антенны, а движение определяется движением центра масс.
Обмен по навигационному каналу с аппаратурой потребителя в режиме текущего времени невозможен из-за низкой пропускной способности навигационного канала. Поэтому для расчета поправок положения центра масс в аппаратуру потребителя должны засылаться исходные данные для проведения расчета упреждающего разворота, а именно:
- время начала упреждающего разворота;
- время окончания упреждающего разворота;
- начальная скорость спутника относительно первой оси;
- угол упреждающего разворота;
- угловое ускорение спутника при проведении разворота;
- угол между положением КА на орбите в момент включения упреждающего разворота и точкой максимального (минимального) угла СОЗ.
Расчет угла при упреждающем развороте в аппаратуре потребителя производится по модели симметричного разворота относительно точки максимального (минимального) угла СОЗ.
Модели упреждающего разворота спутника на борту и в аппаратуре потребителя одинаковы, поэтому угол упреждающего разворота, вычисленный в аппаратуре потребителя, равен углу разворота, вычисленному на борту и отработанному системой ориентации.
Расчет баллистики осуществляется в текущем времени на каждом цикле управления бортовой цифровой вычислительной машины (БЦВМ). Для обеспечения выдачи параметров упреждающего разворота за 10-15 минут до начала упреждающего разворота необходим параллельный расчет баллистических параметров и условий включения упреждающего разворота программным обеспечением системы ориентации и стабилизации (СОС) на 10-15 минут вперед, что приводит к дополнительной загрузке БЦВМ за счет увеличения, практически вдвое, работы программного обеспечения СОС и программного комплекса баллистических задач.
Кинематические параметры упреждающего разворота зависят только от угла между плоскостью орбиты и направлением на Солнце. При одном и том же угле между плоскостью орбиты и направлением на Солнце, реализованном в различное время, параметры упреждающего разворота будут одинаковы, за исключением времени начала и конца упреждающего разворота.
Поэтому, если провести расчет таблиц зависимостей параметров упреждающего разворота от угла между плоскостью орбиты и направлением на Солнце и заложить эти таблицы на борт спутника, то, зная угол α на время включения упреждающего разворота, можно практически без затрат времени БЦВМ получить параметры упреждающего разворота, описанные в таблице 1.
Таким образом, для получения данных для расчета упреждающего разворота необходимо знать:
- угол между плоскостью орбиты и направлением на Солнце в момент включения упреждающего разворота;
- время начала и конца упреждающего разворота.
Ниже приведен перечень операций для решения поставленной задачи.
Для прогнозирования величины угла между направлением на Солнце и плоскостью орбиты необходимо знать скорость изменения угла между плоскостью орбиты и направлением на Солнце. Для этого за время ΔТ до заданного момента расчета параметров упреждающего разворота запоминается текущий угол α между плоскостью орбиты и направлением на Солнце. В заданный момент времени определяется скорость изменения угла α:

где αЗ - запомненный угол; α - текущий угол.
Для прогнозирования угла α на момент начала упреждающего разворота необходимо знать время ТП прохождения спутника по орбите от текущей точки орбиты до точки орбиты, в которой включается упреждающий разворот.

где ЕT - угловое расстояние по орбите от текущей точки до точки, в которой угол Солнце-спутник-Земля максимален (минимален);
Е0 - угловое расстояние по орбите от точки, в которой включается упреждающий разворот до точки, в которой угол Солнце-объект-Земля максимален (минимален);
w0 - орбитальная угловая скорость.
Угол Е0 определяется приближенно с использованием таблиц зависимости Е0(α).
Угол ЕT с использованием фиг. 1 определяется по формуле:

где СОЗT - текущий угол Солнце-спутник-Земля; αT - текущий угол α.
Угол αН между плоскостью орбиты и направлением на Солнце определяется по формуле:

По углу αН из табличных зависимостей определяются параметры упреждающего разворота:
- начальная скорость спутника относительно первой оси;
- угол упреждающего разворота;
- угол между положением спутника на орбите в момент включения упреждающего программного разворота и точкой максимального (минимального) угла Солнце-спутник-Земля.
Время начала и конца упреждающего программного разворота определяется по формуле:
Параметры упреждающего программного разворота, в том числе времена начала и конца упреждающего разворота, записываются в навигационном кадре.
При работе аппаратуры потребителя в момент времени TН начинает разворачиваться циклограмма вычисления курсового угла.
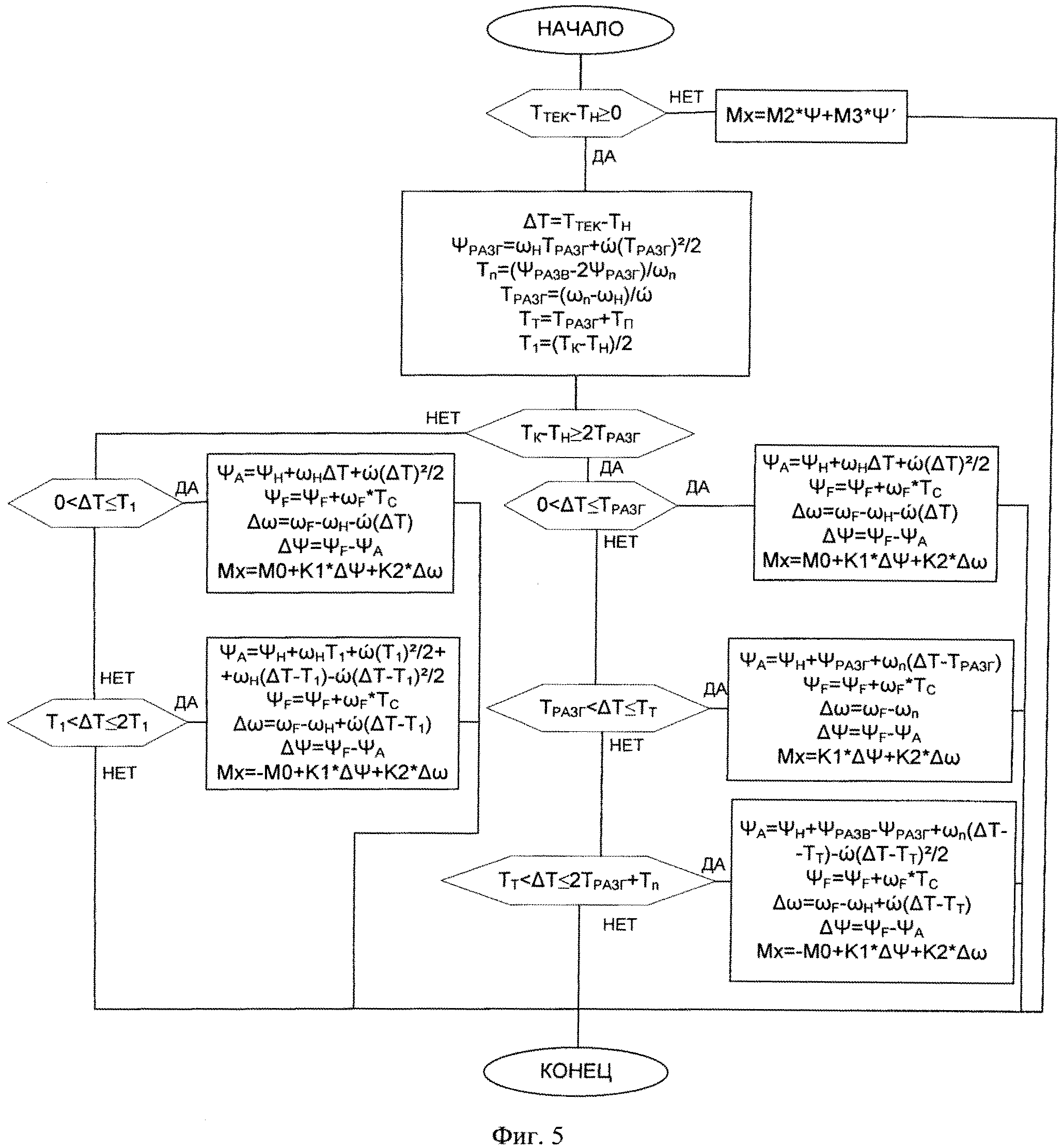
Блок-схема формирования управляющих моментов относительно первой оси спутника при проведении упреждающих программного разворотов показана на фиг. 5.
На фиг. 5 обозначено:
ψА - эталонный угол;
ψF - фактический угол;
ωН - начальная угловая скорость;
ψРАЗВ - угол упреждающего разворота;
ψРАЗГ - угол, пройденный на участке разгона;
МX - управляющий момент;
М0 - номинальный управляющий момент;
К1, К2 - коэффициенты канала управления двигателем, маховиком;
ТРАЗГ - время разгона спутника относительно первой оси до скорости поиска;
ТН - время начала упреждающего разворота;
ТК - время конца упреждающего разворота;
ТП - время разворота на скорости поиска;
TТЕК - текущее время;
 - эталонное угловое ускорение.
- эталонное угловое ускорение.
Формирования курсового угла в аппаратуре потребителя при прохождении особых точек орбиты аналогично формированию угла ψА, описанного на фиг. 5.
Таким образом, заявленное изобретение позволяет уменьшить погрешность прогнозирования движения центра масс и погрешность знания положения фазового центра антенны навигационного спутника при прохождении особых точек орбиты.
|

Регулируемый узел крепления
Способ ориентации космического аппарата в солнечно-земной системе координат
Способ испытаний многозвенной механической системы космического аппарата на функционирование
Частотно-поляризационный селектор
Способ питания нагрузки постоянным током в автономной системе электропитания космического аппарата
Способ заряда литий-ионной аккумуляторной батареи
Способ сборки космического аппарата
Способ электрических проверок космического аппарата
Способ электрических проверок космического аппарата
Способ пайки волноводных трактов
Регулируемый узел крепления
Способ ориентации космического аппарата в солнечно-земной системе координат
Способ разгрузки управляющих двигателей-маховиков космического аппарата
Способ ориентации космического аппарата в солнечно-земной системе координат
Способ ориентации космического аппарата в солнечно-земной системе координат
Способ ориентации навигационного космического аппарата
Способ ориентации космического аппарата
Способ ориентации космического аппарата
Способ ориентации космического аппарата
Способ уменьшения погрешности прогнозирования движения центра масс навигационного космического аппарата

